无人机雁行仿生群飞路径规划
·88·
兵工自动化
Ordnance Industry Automation
2019-04
38(4)
doi: 10.7690/bgzdh.2019.04.021
无人机雁行仿生群飞路径规划
周良,王茂森,戴劲松
(南京理工大学机械工程学院,南京 210094)
摘要:为解决单架无人机因互相之间没有通信机制而无法独立进行路径规划的问题,提出一种仿生雁群路径航路选择的无人机群飞路径规划。介绍算法原理,将无人机初始化为粒子后,在无人机群中确定主机、僚机。依据遗传算法基础原理,将仿生学引入到无人机群协同编队飞行航点规划当中,使用遗传算法对组群飞行的主机航路进行路径规划,产生需要的解或最优解;通过模仿雁群跟随的策略,设计僚机跟随主机的算法,从而实现组群飞行,并进行了实验验证。实验结果表明,该研究对无人机群飞行控制有一定的参考价值。
关键词:无人机群;雁行;仿生;路径规划
中图分类号:TP302 文献标志码:A
Bionic Route Planning of UAV Based on Stimulating Wild Goose Flyiing
Zhou Liang, Wang Maosen, Dai Jinsong
(School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing 210094, China) Abstract: In order to solve the problem that single UAV cannot plan route independently since there is no communication mechanism between each other, an UAV route planning of bionic goose group path selection is proposed. Introduce the algorithm principle. After the UAV is initialized into particles, the host and the wing aircraft are identified in the UAV group. According to the basic principle of genetic algorithm, bionics is introduced into the planning of UAV group cooperative flying point plane. The genetic algorithm is used to plan the path of the host flight path of group flying, and the solution or optimal solution is generated. By simulating the strategy followed by the geese group, the algorithm of the downtime following the host was designed to realize the group flight. The flight test was carried out. The experimental results show that the research has certain reference value for UAV group flight control.
Keywords: UAV group; goose group flying; bionics; path planning
0 引言
近年来,无人机日益成为人工智能领域中最活跃、研发进度最快、应用最广泛的研究课题,尤其是在军事方面的运用[1]。单架无人机由于缺乏冗余设计,一旦发生故障、路况突变,只能放弃任务并返航[2]。无人机群协同编队飞行不仅能统筹协调规划任务,而且通过多机系统通信可以掌握更全面的路况信息,显著地提高了无人机的飞行性能指标[3]。目前,国内外无人机编队飞行控制方法主要有:1)长僚机控制法;2) 人工势场法;3) 图论法等[4]。这些方法主要局限于单架无人机的航点规划,对多架次无人机的组群飞行路径规划问题的研究文献还比较少[5]。
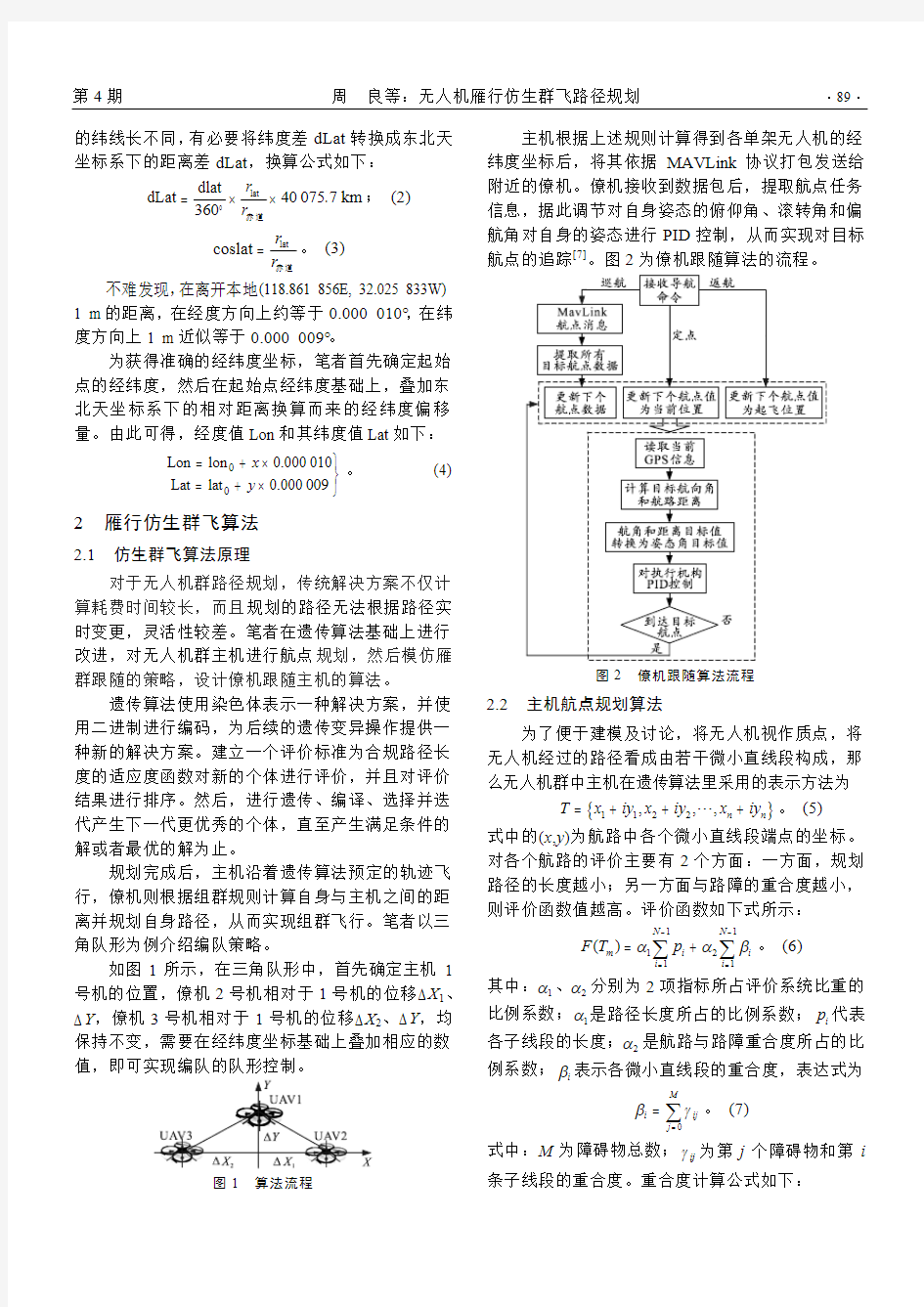
笔者模拟分析雁群跟随头雁的列队方式以及个雁用眼睛近距离观测并躲避障碍物的方法,基于无人机群主僚机协同编队飞行与生物系统雁群编队飞行的相似性,将仿生学引入到无人机群协同编队飞行航点规划当中。在遗传算法基础上改进,对长机进行航点规划,僚机跟随长机,并辅以防碰撞算法,使无人机群能够模仿雁群进行自主规划路径。
1 经纬度与东北天坐标系换算
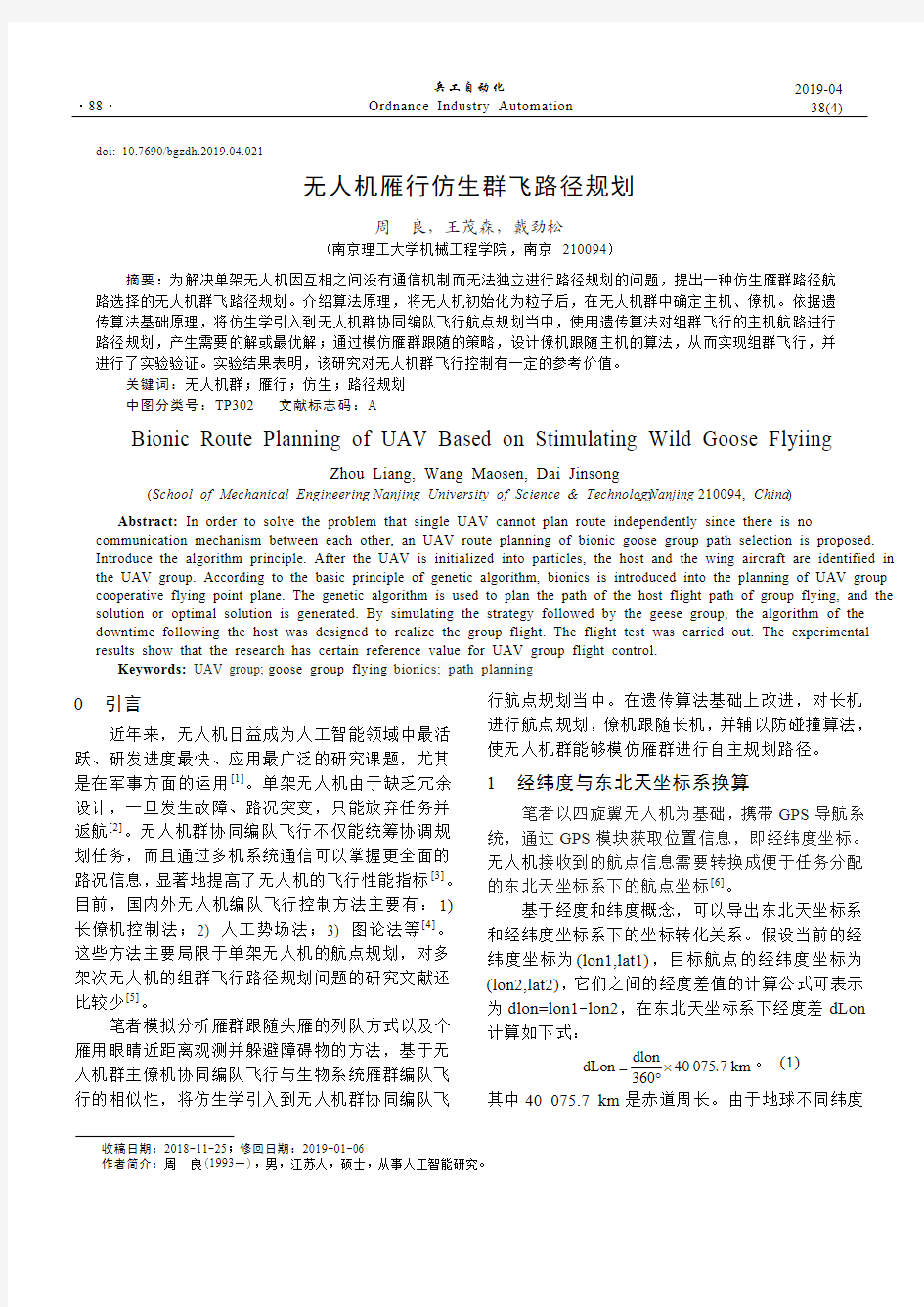
笔者以四旋翼无人机为基础,携带GPS导航系统,通过GPS模块获取位置信息,即经纬度坐标。无人机接收到的航点信息需要转换成便于任务分配的东北天坐标系下的航点坐标[6]。
基于经度和纬度概念,可以导出东北天坐标系和经纬度坐标系下的坐标转化关系。假设当前的经纬度坐标为(lon1,lat1),目标航点的经纬度坐标为(lon2,lat2),它们之间的经度差值的计算公式可表示为dlon=lon1-lon2,在东北天坐标系下经度差dLon 计算如下式:
dlon
dLon400757km
360
.
=?
?
。 (1)其中40 075.7 km是赤道周长。由于地球不同纬度
1
收稿日期:2018-11-25;修回日期:2019-01-06
作者简介:周良(1993—),男,江苏人,硕士,从事人工智能研究。
无人机路径规划算法与仿真
收稿日期:2005-08-23 修回日期:2006-01-20*基金项目:国防基础973基金资助项目 作者简介:马云红(1972- ),女,山西临猗人,博士生,主 要从事飞行器优化算法,任务规划和智能控制的研究。 文章编号:1002-0640(2007)06-0033-04 无人机路径规划算法与仿真* 马云红,周德云 (西北工业大学电子信息学院,陕西 西安 710072) 摘 要:根据敌方防御雷达、防空火力等威胁以及禁飞区的分布情况,构造基于战场威胁中心的V or ono i 图,得到可以规避各种威胁的航迹线段,结合战场威胁信息,计算航迹段的代价,形成有向图,计算出无人机初始最优航路,利用无人机初始状态和性能约束进行航路的进一步修正,满足了无人机的飞行特点。并运用M AT L AB 编制图形化界面,实现仿真结果的图形显示。 关键词:无人机,路径规划,Vo ro noi 图,修正中图分类号:V 249.1 文献标识码:A Study of Path Planning Algorithm and Simulation for UAV M A Yun -hong ,ZHOU De -y un (College of Electr onic I n f ormation ,N orthw est P oly technic U niver sity ,X i ’an 710072,China ) Abstract :A Vo ronoi diag ram is constr ucted based solely on the locations of the threats and no -fly zones.The Vo ronoi g raph yields the optimal paths to travel betw een a set o f threat central points to avo id the threats and no-fly zones.T he vector graphics is consisted of line w hose cost is calculated according to the special inform ation of thr eats including rang e ,location ,killing probability and so o n .Dijkstra ’s algo rithm is used to get the initial optimal paths ,and mor e ,the paths are transform ed into fly able paths according to UA V ’s initial state and capability lim it.T he simulatio n is com pleted under M AT LAB platform and the sim ulation result is presented. Key words :UA V ,path -planning ,Vor ono i diagr ams ,mo dification , 引 言 随着现代科学技术的突飞猛进和人们对未来战争认识观念的变化,世界各国愈来愈重视无人机的发展与研究,成为最近几年空中作战飞机的发展热点。相对于有人驾驶飞机而言,无人机具有许多优点,包括突出的机动性和灵活性,较低的生产成本,较大的负载能力,不考虑人员伤亡风险以及可进行高层协同等。从最近几年的发展情况来看,无人机的用途已从空中靶机、战场侦察逐步发展为干扰通信,压制敌方防空火力,进行导弹防御,攻击固定或移动目标,实施电子干扰、充当目标诱饵和进行对地攻击 等,在近二十年的几场局部战争中,无人机的成功使用和突出的作战效果进一步证实了无人机在现代战争中的作用与地位,从而大大促进了无人机技术的进一步发展。随着无人机在军事应用中的作用逐步 增大,无人机的相关技术也吸引了不少学者进行深入的研究,取得了一定的研究成果。作为提高无人机作战效率和作战自主性的关键技术,无人机路径规划问题成为许多学者的研究方向[3,4]。本文立足于解决给定战场威胁分布情况下的无人机飞行路径规划,通过构造威胁场分布的Vo ronoi 图得到待选路径段,然后采用Dijstra 算法进行最优路径的求解,并在MAT LAB 环境下进行了相应的仿真,给出了仿真结果。 1 战场环境的V oronoi 图构建 1.1 Voronoi 图的定义 Vo ronoi 图的含义为[1]:平面上一个点集P 的 Vol.32,No.6 J une,2007 火力与指挥控制 Fire Control and C om man d Con trol 第32卷 第6期2007年6月
路径规划
路径规划是根据任务目标规划满足约束条件的飞行轨迹,其目的是根据预设数字地图,通过GPS/INS组合导航系统,在适当时间内计算出最优或次最优的飞行轨迹。轨迹跟踪控制也是跟路径规划相关的内容。对于轨迹跟踪控制,先将预定轨迹划分为一系列轨迹片段,设定一系列控制轨迹点。将控制轨迹点进行连接形成预定轨迹的逼近,四旋翼在满足预定速度和加速度约束的条件下,从一个轨迹点向下一个轨迹点飞行,实现轨迹跟踪。为实现有效轨迹跟踪控制,对于轨迹切向速度和法向侧位移误差进行反馈控制。切向速度误差控制保证四旋翼能够在预定时间到达指定目标轨迹点,法向侧位移误差控制能将轨迹跟踪偏离控制在一定范围内并始终使四旋翼回到预定轨迹上。 对四旋翼的路径规划是根据任务要求和通过约束条件:飞行的起点、终点、路径坐标、飞行高度、时间限制等,建立路径规划模型,规划出一条由起点到终点的飞行路径。通常都是将规划好的航迹路线下载到四旋翼的飞行控制板,通过调用规划好的航迹路线,飞行控制模块发送指令,使四旋翼按照航迹飞行。航迹规划可以分为两个层次:第一层是整体参考航迹规划,飞行任务要求,在确定飞行区域的情况下,通过动态路径规划算法生成一条最优参考航迹;第二层是局部航迹动态优化,由于航迹跟踪存在误差以及四旋翼重量较轻易受外部环境干扰,飞行过程中按一定频率调用动态航迹规划比对当前位置,最后生成最优航迹。 四旋翼的航迹规划主要考虑飞行器的大小、续航时间、动态性能等约束条件,这与固定翼航迹规划有较大的不同。四旋翼自身的约束要求:四旋翼尺寸,根据实际情况考虑是否忽略。最小飞行步长,四旋翼改变飞行姿态前必须保持直飞的最短距离。最大航程,能达到的最远飞行距离。飞行高度,设置最低安全飞行高度与最高飞行高度。 航迹规划算法可以分为传统经典算法和现代智能算法。前者主要包括动态规划法、导数相关法、最优控制法;后者主要包括启发式搜寻、遗传算法、人工神经网络、群体智能(主要包括蚁群算法、粒子群算法、蜂群算法)等。 <小型无人机航迹规划及数据链的设计>
无人机任务规划的基本概念
主要内容 ?无人机任务规划的基本概念三 ?无人机任务规划方法三 ?无人机任务规划的数字地图技术三 ?无人机地面控制站的基本概念三 ?无人机地面控制站的分类二配置和转移运输三 5.1 无人机任务规划的基本概念 由于无人机是无人驾驶的飞行器,所以在飞行前需要事先规划和设定好它的飞行任务和航线三在飞行过程中,地面操纵人员还要随时了解无人机的飞行状态,根据需要操控无人机调整姿态和航线,及时处理飞行中遇到的特殊情况,以保证飞行安全和飞行任务的完成三这就需要配备能够提供任务规划与指挥控制方面相应功能支持的设备或系统,这就是无人机的任务规划与指挥控制系统三 5.1.1一任务规划的定义和特点一 1.任务规划的定义 一一规划是一个综合性的计划,它包括目标二政策二程序二规则二任务分配二要采取的步骤二要使用的资源以及为完成既定行动方针所需的其他因素三 任务规划(M i s s i o nP l a n n i n g,M P)是对工作实施过程二方法的组织和计划三在军事领域,任务规划已逐渐变为一个专有名词,尤其是现代无人化装备的出现,使得任务规划越来越重要三装备作战规划的结果是装备作战行动的实施依据三对有人化装备而言,规划结果 主要作为任务承担人员决策的参考;但对无人化装备而言,规划即控制,是装备运行过程中
137 一 唯一的执行依据,因此,任务规划的输出信息必须满足准确性二完整性和一致性的要求三 2.任务规划的特点 任务规划具有以下几个特点: (1)制作任务规划时需要具有整体性二全局性的思考和考量三 (2)制作任务规划须以准确的数据为基础,运用科学方法进行从整体到细节的设计三 (3)任务规划须在实际行动实施之前进行,其结果要作为实际行动的具体指导三5.1.2一 任务规划系统的定义和功能一 1.任务规划系统的定义一一任务规划系统( M i s s i o nP l a n n i n g S y s t e m ,M P S )是指利用先进的计算机技术采集二存储各种情报信息,进行大规模分析计算,从而辅助制定任务计划的信息系统三任务规划系统的出现和广泛使用是现代意义的任务规划区别于过去所说的作战计划二作战筹划的根本标志三 2.任务规划系统的功能 作为整个信息化作战系统的一个重要节点,任务规划系统不是一个孤立的封闭系统,它一端与作战指挥系统的任务对接,另一端与作战装备直接交联,如图 5-1所示,主要包括信 息采集与处理模块二规划作业模块二任务预演评估模块和任务输出模块 三图5-1一任务规划系统基本组成结构 (1)信息采集与处理模块三任务规划系统需要采集的信息主要包括上级下达的任务信息二指挥控制信息二情报信息(如目标信息二敌作战意图等)和战场环境信息(敌情二我情二地形二气象二电磁)等三对采集的信息要进行加工处理,包括地形和气象信息显示,禁飞区二威胁区及战场态势标绘等三 (2)规划作业模块三该模块用于制定装备作战过程的时间二空间和行为准则,通常包括航线规划和机载设备使用规划,以及与其他作战实体的协同和交互规划等三根据任务规划系统所具有的自主化能力大小,通常还包括冲突检测二安全评估二自动的威胁规避和航线生成等分析计算模块,用于辅助人工决策操作三 (3)任务预演评估模块三规划效果预演主要包括飞行仿真二载荷作战效果仿真等,评估包括装备本身的效能评估和任务规划的作战行动效能评估两个方面三预演评估的主要作用是对装备作战的效果进行预估和判断,并反馈以指导决策,形成优化规划方案,同时便于指挥员和操作员熟悉作战过程,了解和把握作战关键环节三 (4)任务输出模块三任务输出是将规划结果以数据的形式输出给作战装备和其他作战节点三输出的任务规划信息应该是完备二一致和可理解的,能够被其他信息系统正确读取和
四旋翼无人机毕业设计
渤海大学本科毕业论文(设计)四旋翼无人机设计与制作 The Manufacture and Design of Quad Rotor Unmanned Aerial Vehicle 学院(系): 专业: 学号: 学生姓名: 入学年度: 指导教师: 完成日期:
摘要 四旋翼无人机飞行器因为它的结构简单,而且控制起来也很方便,因此它成为了近几年来发展起来的热门产业。在这里本文详细的介绍了四旋翼飞行器的设计和制作的过程,其中包括了四旋翼无人机飞行器的飞行原理,硬件的介绍和选型,姿态参考算法的推导和实现,系统软件的具体实现。该四旋翼飞行器控制系统以STM32f103zet 单片机为核心,根据各个传感器的特点,采用不同的校正方法对各个传感器数据进行校正以及低通数字滤波处理,之后设计了互补滤波器对姿态进行最优估计,实现精确的姿态测量。最后结合GPS控制与姿态控制叠加进行PID控制四旋翼飞行器的四个电机,来达到实现各种飞行动作的目的。在制作四旋翼飞行器的过程中,进行了大量的调试并且与现有优秀算法做对比验证,最终设计出能够稳定飞行的四旋翼无人机飞行器。 关键词:姿态传感器;四元数姿态解算;STM32微型处理器;数据融合;PID
The Manufacture and Design of Quad Rotor Unmanned Aerial Vehicle Abstract Quad-rotor unmanned aerial vehicle aircraft have a simple structure, and it is very easy to control, so it has become popular in recent years. Here article describes in detail the design and the process of making the four-rotor aircraft, including Quad-rotor UAV aircraft flight principle, hardware introduction and selection, implementation and realization of derivation attitude reference algorithm, the system software . The Quad-rotor aircraft control system STM32f103zet microcontroller core, and the advantages and disadvantages based on the accelerometer sensor, a gyro sensor and electronic compass sensors using different correction methods for correcting various sensor data and low-pass digital filter processing, after design complementary filter to estimate the optimal posture, precise attitude measurement. Finally, GPS control and attitude control PID control is superimposed four-rotor aircraft four motors to achieve a variety of flight maneuvers to achieve the purpose. Four-rotor aircraft in the production process, a lot of debugging and do comparison with the existing excellent algorithm validation, the final design to stabilize the Quad-rotor UAV flying aircraft. Key Words:MEMS Sensor; Quaternion; STM32 Processor; Data Fusion; PID
一种基于蚁群算法的无人机协同任务规划优化算法
龙源期刊网 https://www.360docs.net/doc/9b17606159.html, 一种基于蚁群算法的无人机协同任务规划优化算法 作者:黄伟民王亚刚 来源:《软件导刊》2017年第07期 摘要:随着无人机在军事领域的广泛应用,越来越多的无人机将应用在未来战场,因此 无人机协同规划变得越来越重要。建立了多无人机协同任务分配模型,并研究了模型求解的有效算法。在蚁群算法的基础上提出针对密度较大目标区域的多无人机协同任务规划的优化方法,优化蚁群算法的搜索条件,降低了蚁群算法的时间和空间复杂度。 关键词:无人机;协同规划;蚁群算法;目标群密度 DOIDOI:10.11907/rjdk.171261 中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2017)007-0131-03 0 引言 多基地多无人机协同侦查模型可以描述为:利用多种不同性能的无人机对多个空间分散的目标进行侦查,这些无人飞机分散在多个地理位置不同的基地上,需要快速制定无人侦查飞机的侦查任务计划以满足侦查要求和实际约束条件。在无人机迅速发展的同时,雷达技术也快速发展,因此一旦有侦察无人机进入防御方某一目标群配属雷达探测范围,防御方目标群的配属雷达均开机对空警戒和搜索目标,并会采取相应对策,包括发射导弹对无人机进行摧毁等,因此侦察无人机滞留防御方雷达探测范围内时间越长,被其摧毁的可能性就越大[1-2]。本文以侦察、监视任务为中心,以协同探测多基地目标为背景,在蚁群算法规划路线的基础上进一步优化线路,以此尽可能缩短无人机任务飞行时间和被雷达探测到的时间。 2 无人机侦察目标群聚类 为了最大程度上利用各无人机基地资源,首先要对目标群进行聚类。常用的聚类方法有 K-means聚类算法、层次聚类算法、SOM聚类算法和FCM聚类算法[3]。本文采用层次分析法对目标群进行聚类,通过聚类,可以规划出各无人机基地派出的无人机的探测目标群,在无 人机数量和飞行参数限制条件下,这样做能最大限度地提高效率。 层次分析法的算法流程如图1所示。 3 基于改进蚁群算法的目标群路线规划
基于无人机的线路巡查系统设计
基于无人机的线路巡查系统设计 发表时间:2018-12-05T21:47:00.547Z 来源:《电力设备》2018年第22期作者:段李飞蒋钰何强宋治王治军宋强 [导读] 摘要:人类为了应对越来越紧迫的能源危机和环境危机,正在大力发展光伏发电等清洁能源。 (国网长治供电公司山西长治 046000) 摘要:人类为了应对越来越紧迫的能源危机和环境危机,正在大力发展光伏发电等清洁能源。2017年,我国光伏发电新增装机高达53.06GW,其中,分布式光伏新增装机达到20GW,占全部新增装机的接近40%,分布式光伏电站的运维也面临日益严峻的挑战。 关键词:无人机;新能源;分布式光伏;红外成像检测 1前言 四旋翼无人机成本低,轻便灵活,可搭载丰富的设备,因此许多大型光伏电站正逐步将其应用到光伏巡检中。在实际应用中发现,仅考虑到达目标点的轨迹规划方案因为没有考虑到四旋翼无人机的运动学特性,会造成区域漏检,影响最终检测结果的可靠性。此外,由于旋翼无人机续航能力的限制,巡检过程中的飞行路径规划也会直接影响到任务的执行效率。 2光伏产业简介及问题描述 2.1光伏巡检环境 在大型光伏电站中,由于北半球的日照来自偏南侧,光伏组件通常以光伏组串的形式放置,组串大体上是东西走向,南北相邻的光伏组串之间有一定的间隔,保证每个组件尽可能接受到辐照能量。由于光伏组串间外观都十分相近,光伏场区内的地理环境也大都较为重复,难以找出典型且通用的特征以支持对不同的地理区域进行区分。巡检的目标是以尽可能高的效率对整片光伏场区进行覆盖式的图像采集、分析并定位故障,在线路径规划在此场景下并不适用,因此对本例来说,需通过提前获得相对精确的光伏组件安装信息(如建站施工时的CAD图纸、高精度的GPS信息等等)采取离线路径规划的方式。针对该次飞行任务,设定无人机巡检高度为100m。在一次巡检中,令无人机沿着光伏组串的排列方向进行匀速飞行,无人机机身搭载的三轴云台相机视角朝向正下方并定点连续拍照,这种设计减轻了后期处理中的故障组件定位难度。当无人机完成对一列光伏组串的巡检并要进行下一列的巡检时,需要进行转弯机动,在旧方案里采用的是先减速定点再进行转弯的直线飞行模式,但是在实践中发现,某些情况下云台角度会与预期产生偏差,导致拍摄的图像不准确,影响后期的检测处理。 2.2飞行约束条件 无人机机身上搭载的相机自带一体式的三轴增稳云台,可以支持在大动作飞行的情况下依然保持视频拍摄平稳。在无人机的巡检过程中,云台相机的俯仰角被设定在-90°,亦即视角竖直向下。由于三轴云台具有自稳特性,机身在一定范围内的倾斜会让电机作出相应调整,而不会改变相机的对地位姿,保持视频画面平稳。当机身的俯仰角大于0°时,云台为保持画面平稳,会将俯仰角朝向∠C方向调整,即[-120°,-90°]范围内;若机身的俯仰角大于30°,则将超出云台相机的机械调节范围,在角度过大期间,将无法拍摄到预期图像;当机身俯仰角由大于30°减小到30°以下时,云台相机的俯仰角也不会回正,而是会由于传感器的偏差等原因,落在∠B范围内,即俯仰角处于[-90°,0°]的区间内,且误差会随着多次的俯仰角超出调整范围而产生叠加效应。此时只能通过手动调整云台角度,该过程涉及到人工操作,且动作滞后。这就导致了机身每发生一次大幅度的角度变化都会导致错误的发生。 3无人机在分布式光伏电站的应用分析 (1)分布式光伏电站采用人工巡检需要花费大量的时间和精力,费时费力,效率低下,难度大,成本高,风险突出。随着经济的发展和科技的进步,无人机技术快速发展,应用越来越广泛。无人机在航拍、农林植保、地质勘探、电力巡检等行业都有大量应用。 (2)在电力行业,无人机主要应用于架空输电线路巡检,为此国家电网发布了《架空输电线路无人机巡检系统配置导则》、中电联发布了《架空输电线路无人机巡检作业技术导则》。随着发展,行业内已经认识到无人机的优势,并编制了《光伏电站用无人机系统检测技术规范》,对无人机巡检系统及光电吊舱进行规范指引。 (3)光伏电站是无人机在电力系统应用的典型案例,无人机可以利用自身优势,快速对分布式光伏电站屋顶进行巡检,有效解决人员攀爬屋顶等困难,大大提高巡检效率,同时也规避了因人员攀爬工业钢构架屋顶产生的人员坠落及雷击等安全风险。 (4)由于分布式光伏,集电线路沿墙壁外延引出,巡查难度相对较大,房屋用户基本为工业企业,生产活动难免会对线路及组件产生影响。搭载高清摄像头的无人机对集电线路、光伏组件、屋顶状况等方面开展巡检,可以有效发现存在问题,能够及时解决隐患,即降低项目损失。 (5)除了实现日常巡检外,无人机搭配具有红外成像的光电吊舱还能实现光伏组件红外巡检,有效发现组串中损坏的发热组件。组件损坏或局部遮挡后将会产生热斑效应,由发电单元变为损耗单元,不但损坏组件寿命,并且影响整体组串的发电量。定期开展红外检测工作,将大大提高因组件损坏造成组串出力不高而损失的电量,尤其是分布式光伏位于工业园区,人为或其他原因造成的组件损坏率高,且遮挡问题较为严重。 (6)利用无人机巡检光伏电站,不仅降低了组件损坏的发现难度,在节省人工提升效率方面更具有先天的技术优势,将成为分布式光伏电站运维难点解决的关键助手。目前行业内已经开始逐步推广应用,无人机具备设置巡航路线,自动拍摄的功能,极大的方便了巡视数据的获取和后期数据分析。同时无人机的GPS导航功能也可以快速的定位巡视中存在缺陷的组件,便于维护人员及时赶赴现场处理。 4无人机的线路巡查系统设计 利用智能化的无人机巡检系统,可以自动开展巡检工作,巡检系统一般包括无人机系统、数据采集系统、地面智能控制系统和数据分析处理系统等4部分。 4.1无人机系统 无人机系统一般配置较长时间续航能力,同时具备一定的防护能力,多为工业级多旋翼无人机,并配置最新的飞行控制器,采用多传感器融合算法,以便控制能够精准可靠;能实时查看相机画面,传输距离远达5km;内部控制能够实时监控剩余电池电量,系统会自动分析计算出返航和降落所需的电量和时间,避免因电量不足引发的危险。同时可实现20min快速充电功能,能在短时间内将电池充满。 4.2数据采集系统数据 采集系统一般包含成像系统,能够识别组件遮挡物、灰尘遮盖状况,同时拥有红外成像系统,可采集热斑情况。图像数据一般实时传
复杂环境下多目标多无人机协同任务规划
复杂环境下多目标多无人机协同任务规划 摘要:在当今更加复杂的战争环境中,无人机通常以协调的舰队执行特殊任务。因此,本文构建了无人机联合任务计划系统的模型,并对无人机联合任务计划控 制系统,多目标任务分配架构,无人机目标融合体系结构和弹道计划模型进行了 设计研究。通过结合层次聚类算法和数值模拟实验,我们旨在确认设计的有效性,进一步提高无人机在复杂和动态环境中的飞行适应性,并为在最短时间内开发合 理的无人机协作任务分配提供合理的计划,理论上的帮助。 关键字:复杂环境,无人机,协作任务,模型规划 简介:随着近几年无人机技术的飞速发展,基于无人机联合任务计划的实现 多个战略目标的合作已成为许多领域特别是军事领域的重要发展成就之一。其中,所谓的多无人机协作系统,是指由多个无人机组成一个整体来实现一个综合战略 目标的任务机制,可以利用多个无人机的信息共享功能来实现无人机的任务效率。发挥最大作用。在这方面,有必要考虑到多目标状态的不确定性和目标的多样性,合理地控制无人机的资源分配,并依靠无人机轨迹规划模型来确保无人机到目标 的全范围。通过覆盖并减少无人机定位错误,您可以灵活地应对定位目标的意外 情况。 1多无人机协作任务计划和控制体系结构 如果是一架无人驾驶飞机,它会构建一个层次结构和一个包容性架构。分层 结构是指人类思维行为的模型,并建立了依赖于老板的“感知-思考-执行”的组 织系统。它使用实时通信来确保系统的执行能力,因此其实用性相对较差。相反,包容性体系结构采用“感知执行”单元的独立操作模式,尽管不需要依靠组织的通 信来执行任务,但是缺乏全局控制使创建局部最佳情况变得容易。在这方面,基 于多个系统的优缺点构造了如图1所示的分层和分层的分布式工作计划控制系统 结构。 图一:分层递阶分布式任务规划控制体系结构 基于此,我们基于任务结构构建任务执行模型框架。其中,无人机根据指定 的信息在任务区域内找到目标,然后准确确定任务目标的位置并进行系统分析, 以确保对目标状态信息的连续监视。因此,传感器通常用于跟踪目标,并且由于 传感器本身的观察范围有限,因此有必要基于多架无人机的协同目标跟踪来实现 对目标信息的实时监控,以形成多UAV协作,如图2所示,跟踪多目标系统架构。 图二:多无人机协同跟踪多目标系统架构 2多无人机多目标分配控制体系结构 由于在无人机执行任务时任务目标分散,因此必须对无人机进行合理地分组 和分配以满足多个目标的跟踪要求。其中,特定无人机的数量和目标的分散特性 无法预先预测,任务目标可能会意外发生,因此必须考虑疏散区域的情况来选择 分配算法。在这方面,我们使用分层聚类算法来分析问题,但是由于分层聚类算 法不适用于地面静止或速度较慢的目标,因此我们需要在目标初始化状态下完成 所有对象的聚类。类,并通过层次聚类算法的变换来完成多个对象的合理分组。 基于此,仿真实验是基于多目标分层聚类算法的,该算法基于对五个无人机 系统进行跟踪六个目标(包括目标分离,目标组合和进入被遮挡区域的目标)的 数值模拟的结果。已经完成了。分层聚类算法具有一定的适用性,可以平滑解决
无人机雁行仿生群飞路径规划
·88· 兵工自动化 Ordnance Industry Automation 2019-04 38(4) doi: 10.7690/bgzdh.2019.04.021 无人机雁行仿生群飞路径规划 周良,王茂森,戴劲松 (南京理工大学机械工程学院,南京 210094) 摘要:为解决单架无人机因互相之间没有通信机制而无法独立进行路径规划的问题,提出一种仿生雁群路径航路选择的无人机群飞路径规划。介绍算法原理,将无人机初始化为粒子后,在无人机群中确定主机、僚机。依据遗传算法基础原理,将仿生学引入到无人机群协同编队飞行航点规划当中,使用遗传算法对组群飞行的主机航路进行路径规划,产生需要的解或最优解;通过模仿雁群跟随的策略,设计僚机跟随主机的算法,从而实现组群飞行,并进行了实验验证。实验结果表明,该研究对无人机群飞行控制有一定的参考价值。 关键词:无人机群;雁行;仿生;路径规划 中图分类号:TP302 文献标志码:A Bionic Route Planning of UAV Based on Stimulating Wild Goose Flyiing Zhou Liang, Wang Maosen, Dai Jinsong (School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing 210094, China) Abstract: In order to solve the problem that single UAV cannot plan route independently since there is no communication mechanism between each other, an UAV route planning of bionic goose group path selection is proposed. Introduce the algorithm principle. After the UAV is initialized into particles, the host and the wing aircraft are identified in the UAV group. According to the basic principle of genetic algorithm, bionics is introduced into the planning of UAV group cooperative flying point plane. The genetic algorithm is used to plan the path of the host flight path of group flying, and the solution or optimal solution is generated. By simulating the strategy followed by the geese group, the algorithm of the downtime following the host was designed to realize the group flight. The flight test was carried out. The experimental results show that the research has certain reference value for UAV group flight control. Keywords: UAV group; goose group flying; bionics; path planning 0 引言 近年来,无人机日益成为人工智能领域中最活跃、研发进度最快、应用最广泛的研究课题,尤其是在军事方面的运用[1]。单架无人机由于缺乏冗余设计,一旦发生故障、路况突变,只能放弃任务并返航[2]。无人机群协同编队飞行不仅能统筹协调规划任务,而且通过多机系统通信可以掌握更全面的路况信息,显著地提高了无人机的飞行性能指标[3]。目前,国内外无人机编队飞行控制方法主要有:1)长僚机控制法;2) 人工势场法;3) 图论法等[4]。这些方法主要局限于单架无人机的航点规划,对多架次无人机的组群飞行路径规划问题的研究文献还比较少[5]。 笔者模拟分析雁群跟随头雁的列队方式以及个雁用眼睛近距离观测并躲避障碍物的方法,基于无人机群主僚机协同编队飞行与生物系统雁群编队飞行的相似性,将仿生学引入到无人机群协同编队飞行航点规划当中。在遗传算法基础上改进,对长机进行航点规划,僚机跟随长机,并辅以防碰撞算法,使无人机群能够模仿雁群进行自主规划路径。 1 经纬度与东北天坐标系换算 笔者以四旋翼无人机为基础,携带GPS导航系统,通过GPS模块获取位置信息,即经纬度坐标。无人机接收到的航点信息需要转换成便于任务分配的东北天坐标系下的航点坐标[6]。 基于经度和纬度概念,可以导出东北天坐标系和经纬度坐标系下的坐标转化关系。假设当前的经纬度坐标为(lon1,lat1),目标航点的经纬度坐标为(lon2,lat2),它们之间的经度差值的计算公式可表示为dlon=lon1-lon2,在东北天坐标系下经度差dLon 计算如下式: dlon dLon400757km 360 . =? ? 。 (1)其中40 075.7 km是赤道周长。由于地球不同纬度 1 收稿日期:2018-11-25;修回日期:2019-01-06 作者简介:周良(1993—),男,江苏人,硕士,从事人工智能研究。
使用Dubins路径和回旋曲线进行多个无人机的路径规划
使用Dubins路径和回旋曲线进行多个无人机的路径规划 摘要: 本文讲述了对一群无人机进行路径规划的方法。进行这样研究要解决如何使一批无人机同时到达目标的问题。制定可以路径(适航、安全的路径)称为路径规划,它分为三个阶段。第一阶段使规划适航路径,第二阶段通过添加额外的约束规划安全的路径,使无人机不与其他无人机或者已知的障碍碰撞,第三阶段对路径进行规划是无人机同时到达目标。在第一阶段,每个无人机都使用Dubins路径和回旋曲线进行路径规划,这些路径是通过微分几何原理完成的。第二阶段为这些路径添加安全约束:(一)无人机间保持最小间距,(二)规划相同长度的非交叉路径,(三)飞过中间的航线点/形状,使这些路径更安全。第三阶段,所有路径长度相等使无人机可以同时到达目标。一些模拟仿真结果证实了这一技术。 1、介绍 在许多应用程序中自动控制取代了人类操作,像军事系统中存在危害人类因素的地方、处理有害物质、灾难管理、监视侦察等单调的操作。需要开发自动控制系统来更换这些系统中的人类操作员,这样的自动控制系统在水陆空各种环境中都有。在无人机的研究中,水陆空等因素是作为一个集体进行研究的。无人机在军事和民用领域都有广阔的应用前景,因此有许多关于无人机的学术或商业性质的研究。廉价电子产品的飞速发展使得无人机更加实用。大自然中成群的鸟和鱼给了人们灵感,联合控制是自动控制中的一个活跃的研究方向。雇佣一批无人机可以产生成本效益和容错系统。 从一个地方飞到另一个地方并作为一个移动传感平台进行监视或跟踪是无人机的一个功能,实现这个功能需要为无人机提供一个合适的安全路径。路径规划是任务规划的一个分支,图1是任务规划的典型功能体系结构。图1有三个分支,分支的数量和功能会根据应用程序和任务目标的不同而改变。第一层分支的任务是跟踪目标,基于这些目标,这层为无人机分配任务和资源并且充当决策者。第二层为无人机规划路径和轨迹,这一层用路径规划和相关的算法(如避免碰撞)规划可行的轨迹/路径。第三层进行指导和控制,保证无人机在第二层规划的轨迹上飞行。本文着重于第二层的研究,在第二层,路径规划产生的轨迹使一群无人机同时到达指定位置。 在自动控制系统领域,路径规划仍然是一个公开的问题。路径规划是在两个或多个点之间规划出一条或多条路径,通常这些点是在存储地图上指定的。路径
多无人机协同任务规划(A题)
2016年全国研究生数学建模竞赛A题 多无人机协同任务规划 无人机(Unmanned Aerial Vehicle,UAV)是一种具备自主飞行和独立执行任务能力的新型作战平台,不仅能够执行军事侦察、监视、搜索、目标指向等非攻击性任务,而且还能够执行对地攻击和目标轰炸等作战任务。随着无人机技术的快速发展,越来越多的无人机将应用在未来战场。 某无人机作战部队现配属有P01~P07等7个无人机基地,各基地均配备一定数量的FY系列无人机(各基地具体坐标、配备的无人机类型及数量见附件1,位置示意图见附件2)。其中FY-1型无人机主要担任目标侦察和目标指示,FY-2型无人机主要担任通信中继,FY-3型无人机用于对地攻击。FY-1型无人机的巡航飞行速度为200km/h,最长巡航时间为10h,巡航飞行高度为1500m;FY-2型、FY-3型无人机的巡航飞行速度为300km/h,最长巡航时间为8h,巡航飞行高度为5000m。受燃料限制,无人机在飞行过程中尽可能减少转弯、爬升、俯冲等机动动作,一般来说,机动时消耗的燃料是巡航的2~4倍。最小转弯半径70m。 FY-1型无人机可加载S-1、S-2、S-3三种载荷。其中载荷S-1系成像传感器,采用广域搜索模式对目标进行成像,传感器的成像带宽为2km(附件3对成像传感器工作原理提供了一个非常简洁的说明,对性能参数进行了一些限定,若干简化亦有助于本赛题的讨论);载荷S-2系光学传感器,为达到一定的目标识别精度,对地面目标拍照时要求距目标的距离不超过7.5km,可瞬时完成拍照任务;载荷S-3系目标指示器,为制导炸弹提供目标指示时要求距被攻击目标的距离不超过15km。由于各种技术条件的限制,该系列无人机每次只能加载S-1、S-2、S-3三种载荷中的一种。为保证侦察效果,对每一个目标需安排S-1、S-2两种不同载荷各自至少侦察一次,两种不同载荷对同一目标的侦察间隔时间不超过4小时。 为保证执行侦察任务的无人机与地面控制中心的联系,需安排专门的FY-2型无人机担任通信中继任务,通信中继无人机与执行侦察任务的无人机的通信距离限定在50km范围内。通信中继无人机正常工作状态下可随时保持与地面控制中心的通信。 FY-3型无人机可携带6枚D-1或D-2两种型号的炸弹。其中D-1炸弹系某种类型的“灵巧”炸弹,采用抛投方式对地攻击,即投放后炸弹以飞机投弹时的速
无人机集群系统侦察监视任务规划方法
无人机集群系统侦察监视任务规划方法 如何将无人机集群系统部署于大范围环境中进行侦察监视,是未来无人机军事应用的重要问题之一。一方面,环境中往往分布着大量动态变化的子目标/子任务,亟需自动规划算法,实现无人机集群系统在不确定条件下进行连续侦察监视 的快速规划;另一方面,无人机在复杂的环境中进行搜索时,往往需要人辅助提供一些关于环境的知识,所以需要设计良好的人与无人机进行交互的方式,实现在 人辅助下进行搜索。 基于此,论文的主要工作和创新点如下:(1)针对具有子模性规划目标的多智能体部分可观马尔科夫决策过程(MultiAgent Partially Observable Markov Decision Process,MPOMDP),首次提出了一种近似最优的多智能体在线规划算法。这种算法通过顺次分配技术(Sequential Allocation Technique)来依次计算每个智能体的策略,贪婪地最大化单个智能体对团队任务目标的边际贡献(Marginal Contribution),从而避免了直接考虑团队的联合策略(其导致的计算代价与智能体个数呈指数关系),使得计算复杂度随智能体个数呈多项式关系。 论文通过理论证明该算法具有很好的近似最优性能。创新性工作为:使用顺次分配技术来计算智能体的策略,相比于其他的搜索团队联合策略空间的方法, 这种方法具有很好的可扩展性,并能够满足问题的实时性要求。 (2)针对传递函数解耦的部分可观马尔科夫决策过程 (Transition-Decoupled POMDP,TD-POMDP),首次提出了具有良好可扩展性的在 线规划算法——传递函数解耦的部分可观蒙特卡洛规划(Transition-Decoupled Partially Observable Monte-Carlo Planning,TD-POMCP),即一种基于蒙特卡洛树搜索(Monte Carlo Tree Search,MCTS)和max-sum的分散式在线算法。TD-POMCP
无威胁情况下任意两点间的无人机路径规划
第31卷 第9期系统工程与电子技术 Vol.31 No.92009年9月 Systems Engineering and Electronics Sep.2009 文章编号:10012506X (2009)0922157206 收稿日期:2008208212;修回日期:2009203212。基金项目:国家自然科学基金(60774064)资助课题 作者简介:王庆江(19742),男,博士研究生,主要研究方向为航空火力控制及效能分析。E 2mail :chinawqj @https://www.360docs.net/doc/9b17606159.html, 无威胁情况下任意两点间的无人机路径规划 王庆江,高晓光,符小卫 (西北工业大学电子信息学院,陕西西安710072) 摘 要:针对无威胁情况下无人机的路径规划问题,提出了一种较简单、有效的路径规划方法:基于几何原理的无人机路径规划法。在提出了无威胁情况下路径规划的一些基本约定的基础上,重点研究了基于几何原理路径规划法的基本思想,并给出了路径规划的主要步骤。最后,通过一个仿真算例验证了此方法的有效性,并对此方法的优缺点进行了总结。 关键词:无人机;路径规划;航路点中图分类号:V 218 文献标志码:A Path planning of UAV bet w een t w o random points without threats WAN G Qing 2jiang ,GAO Xiao 2guang ,FU Xiao 2wei (School of Elect ronic and I nf ormation ,N orthw estern Pol ytechnical Univ.,X i ’an 710072,China ) Abstract :For t he pat h planning of unmanned aerial vehicles (UAV )wit hout t hreat s ,a simple and effective met hod ,pat h planning based on geometric met hod ,is proposed.After showing t he basis of t he geometric met h 2od ,t he primary ideas and realization step s of pat h planning based on geometric met hod is st udied.Then ,an ex 2ample is given and t he result s demonstrate t he proposed met hod is effective.Finally ,t he advantages and disad 2vantages of t he geometric met hod are summarized. K eyw ords :unmanned aerial vehicle ;path planning ;waypoint 0 引 言 无人机(unmanned aerial vehicle ,UAV )路径规划是无人机任务规划的一部分,其目的是根据无人机受到的各种约束及其任务的要求,找出一条从起点到终点的最优路径。 路径规划的方法有很多,如Voronoi 法[125](V 图法)、概率地图法[628](probabilistic roadmap method ,PRM )、遗传算法[9210](genetic algorithm ,GA )等,从路径规划方法的收敛性、复杂性、快速性及对所求得解的满意度来衡量,上述方法各有其优缺点。 文献[11]提出了一种基于几何原理的无人机路径规划方法,用于处理无威胁情况下二维平面内的路径规划问题。本文是在充分吸收了文献[11]的优点并对其缺点进行改进的基础上,将几何法的研究空间从二维平面延伸到三维空间,提出了一种改进的基于几何原理的路径规划方法(简称为几何法),用来解决三维空间内无威胁情况下的无人机路径规划问题。 1 几何法的约定 1.1 路径规划的约束 在无威胁情况下,无人机路径规划的约束主要有:自身性能约束、携带设备的约束、环境约束等。 自身性能约束将无人机看成一个质点,就可以将其运动简化成质点的运动。这时无人机自身约束主要有:(1)过载的限制。此限制主要与机体强度有关,包括水平方向过载和铅垂方向过载;(2)运动时的最大加速度±a max 限制(水平面内最大加速度为±a h max ,铅垂面内最大加速度为±a v max ,单位:m/s 2)和最大速度v max 限制(水平面内最大速度为v h max ,铅垂面内最大速度为v v max ,单位:m/s )。这两项指标显然与无人机的飞行状态及飞行环境有关,在此将其简化成一个常数;(3)无人机的最大飞行高度H max (单位:m )已知并为一常数;(4)无人机载油量O oil (单位:g )及耗油率r oil (单位:g/s )。这两个参数决定了无人机的最大飞行时间T max (滞空时间)和最大航程L max (单位:m )。无人机的耗油率是其飞行高度和飞行速度等参数的函数,在此认为其为一常数。在某一高