实验二 红外测距传感器实验
信息工程学院实验报告
学号:
精心整理
一、实验目的
1. 学习CC2530 单片机ADC 模块的使用。
2. 学习红外测距传感器的使用。
二、实验原理
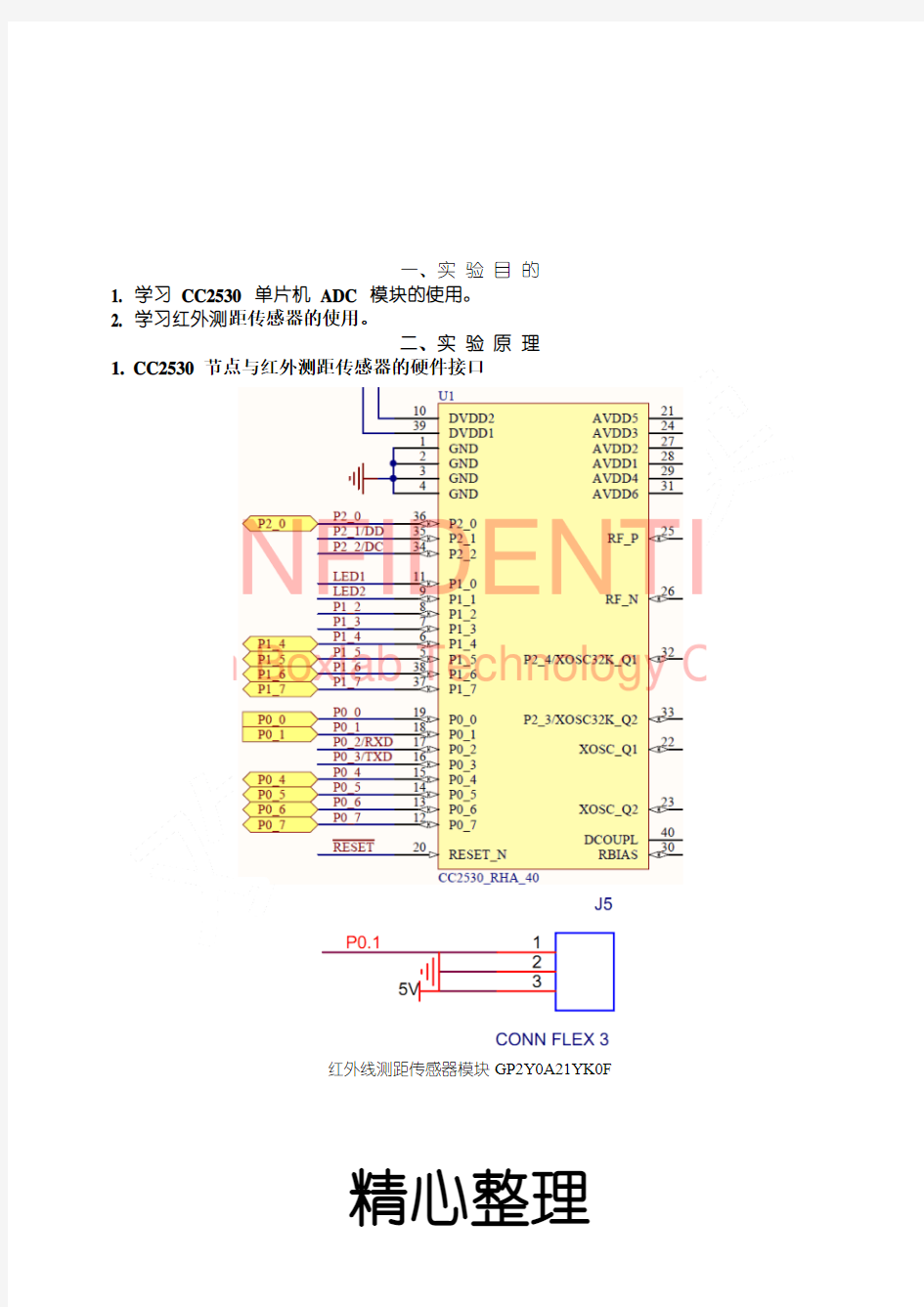
节点与红外测距传感器的硬件接口
红外线测距传感器模块GP2Y0A21YK0F
精心整理
1) 外接
精心整理
ADC的主要特性如下:
精心整理
精心整理
精心整理
据)为 x,
80cm 5ms , 1mm 。
由于GP2Y0A21YK0F 传感器采用的是PSD 光信号调制法,因此其输出的信号电压并不是标准的直流电压,而是叠加了波幅约为0.2V,频率1KHz 的方波,由于波幅达到0.2V,这就影响了分辨率。如果不进行信号处理,分辨率的精度仅能达到1mm。而如果经过有效处理,在正常情况下可以达到0.1mm以上的精度,完全可以满足一般工程定距等方面的需求。
Sharp 的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,反射回来的红外光线被CCD 检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距 f 以后,传感器到物体的距离 D 就可以通过几何关系计算出来了。
传感器特点:
MATLAB 可以拟合出计算公式,直接根据电压值计算出距离,假设测量出
,待测距离为distance(cm),则distance = 26.757 * voltage^-1.236
三、实验内容与步骤
1. 将仿真器的一端JTAG 接口与一个CC2530 模块相连,并打开CC2530节点的电源,再将仿真器的另一端用USB 接口与PC 计算机相连。
2. 用MiniUSB 线将CC2530 节点与计算机的USB 口连接起来后,打开串口调试器软件,设置波特率57600,校验位None,数据位8,停止位1,然后点击打开串口按钮,如下图所示:
精心整理
精心整理
中的“
功能菜单上的绿色下载按钮
开发环境中的运行程序按钮运行程序,如下图所示:
)。
6. 扩展实验
为了能够更加直观地观察到传感器工作的状况,在实验过程中可以利用光盘中配套的上位机软件CurveDisplay 来观察传感器的数据曲线。
操作步骤
(1). 将仿真器的一端JTAG 接口与一个CC2530 模块相连,并打开CC2530 节点的电源,再将仿真器的另一端用USB 接口与PC 计算机相连。
(2). 用MiniUSB 线将CC2530 节点与计算机的USB 口连接起来后,打开配套传感器实验中的“CurveDisplay\CurveDisplay.exe”上位机软件,选择正确的串口号后,再设置波特率57600,
精心整理
校验位None,数据位8,停止位1,最后点击打开连接按钮,如下所示:
“模块中。
精心整理
相应
程序正常运行后,在CurveDisplay 软件中可以观察到传感器的数据曲线,如下图所示:在实验过程中,将传感器水平正对着墙壁或障碍物远离移动,可以在CurveDisplay 软件
上的传感器数据曲线也发生相应的变化,如下图所示:
精心整理
#define GPIO_GLED P1_0
#define GPIO_RLED P1_1
//GPIO_KEY定义(0:被按下,1:未按下)
#define GPIO_SW1 P1_2
#define GPIO_SW2 P1_3
void InitClock(void) //初始化时钟
{
精心整理
unsigned int i;
//turn on 16MHz RC and 32MHz XOSC
SLEEPCMD &= ~0x04;
//wait for 32MHz XOSC stable
while(!(SLEEPSTA & 0x40));
//chip bug workaround
asm("nop");
//延时63us
P1SEL &= ~0x08;
P1DIR &= ~0x08;
}
void InitUART(void) //初始化串口USART0
{
//P0[5..2]配置为外设IO
P0SEL |= 0x3C;
精心整理
//USART 0 I/O location: Alternative 2 location
PERCFG &= ~0x01;
//UART mode
U0CSR |= 0x80;
//无流控制,无校验,1位停止位,8位数据位,起始位为低电平,停止位为高电平
U0UCR = 0x02;
//波特率57600
U0GCR |= 0x0A;
unsigned char sign = (unsigned char)(Num < 0);
unsigned long trunc; //整数部分
unsigned long fract; //小数部分(4位)
if (sign)
{
Num *= -1;
}
精心整理
trunc = (unsigned long)Num;
fract = (unsigned long)((Num-(unsigned long)Num)*1000000);
//处理小数部分
if (fract == 0)
{
ptr[i++] = '0';
}
else
if (sign)
{
ptr[i++] = '-';
}
//字符串逆序输出
for(j=0; j<(i/2); j++)
{
tmp = ptr[j];
精心整理
ptr[j] = ptr[(i-j)-1];
ptr[(i-j)-1] = tmp;
}
//添加字符串结束符
ptr[i] = '\0';
}
void DelayXus(unsigned int Xus) //延时Xus
unsigned int ADC_ReadVal(void) //通过ADC读取P0.1的电压数据
{
int val;
//ADC参考电压: A VDD5 Pin
ADCCON3 |= 0x80;
//512 decimation rate (12 bits ENOB)
精心整理
ADCCON3 |= 0x30;
//Single channel: AIN1
ADCCON3 &= ~0x0F;
ADCCON3 |= 0x01;
//Wait for the conversion to be done
while(!(ADCCON1 & 0x80));
//Read the result(最高位为符号位)
val = (unsigned int)ADCL;
//发送串口初始化成功消息
UART_SendStr("\nUSART0 Init Successfully!\n");
while(1)
{
//点亮GPIO_RLED
GPIO_RLED = 1;
//通过ADC读取P0.1的电压数据
if(GPIO_SW1)
精心整理
{GPIO_RLED = 0;}
else {
val = ADC_ReadVal();
//换算为电压值
voltage = val * 3.3 / 2048;
//发送ADC采集到的数据UART_SendStr("Voltage(V): ");
//最多保留三位小数
精心整理
超声波传感器测距原理
芀一、超声波测距原理 肅超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的 同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S , 即: 膂S = v·△t /2 ① 芀这就是所谓的时间差测距法。 蝿由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T 时, 超声波传播速度V 的计算公式为: 螅V = 331.45 + 0.607T ② 芄 声 速 确 定
后, 只要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。 薂二、系统硬件电路设计 腿图2 超声波测距仪系统框图 蒆基于单片机的超声波测距仪框图如图 2 所示。该系统由单片机定时器产生 40KHZ 的频率信号、超声波传感器、接收处理电路和显示电路等构成。单片机 是整个系统的核心部件,它协调和控制各部分电路的工作。工作过程:开机,单 片机复位,然后控制程序使单片机输出载波为40kHz 的10 个脉冲信号加到超声 波传感器上,使超声波发射器发射超声波。当第一个超声波脉冲群发射结束后, 单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数, 这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。下面分别介绍各部分电路: 莅1 、超声波发射电路 螀超声波发射电路如图3所示,89C51 通过外部引脚P1.0 输出脉冲宽度为250 μ s , 40kHz 的10 个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发 射出超声波。由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远, 可对振荡信号进行功率放大后再加在超声波传感器上。 薈图3中T为超声波传感器,是超声波测距系统中的重要器件。利用逆压电效应 将加在其上的电信号转换为超声机械波向外辐射; 利用压电效应可以将作用在它 上面的机械振动转换为相应的电信号, 从而起到能量转换的作用。市售的超声 波传感器有专用型和兼用型,专用型就是发送器用作发送超声波,接收器用作接
传感器实验报告.doc
实验一金属箔式应变片性能—单臂电桥 1、实验目的了解金属箔式应变片,单臂单桥的工作原理和工作情况。 2、实验方法在CSY-998传感器实验仪上验证应变片单臂单桥的工作原理 3、实验仪器CSY-998传感器实验仪 4、实验操作方法 所需单元及部件:直流稳压电源、电桥、差动放大器、双孔悬臂梁称重传感器、砝码、一片应变片、F/V表、主、副电源。 旋钮初始位置:直流稳压电源打倒±2V档,F/V表打到2V档,差动放大增益最大。 实验步骤: (1)了解所需单元、部件在实验仪上的所在位置,观察梁上的应变片,应变片为棕色衬底箔式结构小方薄片。上下二片梁的外表面各贴二片受力应变片。 (2)将差动放大器调零:用连线将差动放大器的正(+)、负(-)、地短接。将差动放大器的输出端与F/V表的输入插口Vi 相连;开启主、副电源;调节差动放大器的增益到最大位置,然后调整差动放大器的调零旋钮使F/V表显示为零,关闭主、副电源。 (3)根据图1接线R1、R2、R3为电桥单元的固定电阻。R4为应变片;将稳压电源的切换开关置±4V 档,F/V表置20V档。开启主、副电源,调节电桥平衡网络中的W1,使F/V表显示为零,等待数分钟后将F/V表置2V档,再调电桥W1(慢慢地调),使F/V表显示为零。 (4) 将测微头转动到10㎜刻度附近,安装到双平行梁的右端即自由端(与自由端磁钢吸合),调节测微头支柱的高度(梁的自由端跟随变化)使V/F表显示值最小,再旋动测微头,使V/F表显示为零(细调零),这时的测微头刻度为零位的相应刻度。 (5) 往下或往上旋动测微头,使梁的自由端产生位移记下V/F表显示的值,每旋动测微头一周即 压值的相应变化。
传感器简答题
1:简述金属电阻应变片的工作原理,主要测量电路种类及其应用情况 应变式传感器是利用金属的电阻应变效应,将测量物体变形转换成电阻变化的传感器。被广泛应用于工程测量和科学实验中。 一工作原理 (一)金属的电阻应变效应当金属丝在外力作用下发生机械变形时,其电阻值将发生变化,这种现象称为金属的电阻应变效应。如图2-1所示 设有一根长度为l、截面积为S、电阻率为ρ的金属丝,在未受力时,原始电阻为 (2-1) 当金属电阻丝受到轴向拉力F作用时,将伸长Δl,横截面积相应减小ΔS,电阻率因晶格变化等因素的影响而改变Δρ,故引起电阻值变化ΔR。对式(2-1)全微分,并用相对变化量来表示,则有: (2-2) 式中的Δl/l为电阻丝的轴向应变,用ε表示,常用单位με(1με=1×10-6mm/mm)。若径向应变为Δr/r,电阻丝的纵向伸长和横向收缩的关系用 泊松比μ表示为,因为ΔS/S=2(Δr/r),则(2-2)式可以写成 (2-3) 式(2-3)为“应变效应”的表达式。k0称金属电阻的灵敏系数,从式(2-3)可见,k0受两个因素影响,一个是(1+2μ),它是材料的几何尺寸变化引起的,另一个是Δρ/(ρε),是材料的电阻率ρ随应变引起的(称“压阻效应”)。对于金属材料而言,以前者为主,则k0≈1+2μ,对半导体,k0 值主要是由电阻率相对变化所决定。实验也表明,在金属电阻丝拉伸比例极限内,电阻相对变化与轴向应变成正比。通常金属丝的灵敏系数k0=2左右。 (二)应变片的基本结构及测量原理 各种电阻应变片的结构大体相同,以图2-2所示丝绕式应变片为例,它以直径为0.025mm左右的合金电阻丝2绕成形如栅栏的敏感栅,敏感栅粘贴在绝缘的基底1上,电阻丝的两端焊接引出线4,敏感栅上面粘贴有保护用的覆盖层3。l称为应变片的基长,b称为基宽,l×b称为应变片的使用面积。应变片的规格以使用面积和电阻值表示,例如3×10mm2,120Ω。 用应变片测量受力应变时,将应变片粘贴于被测对象表面上。在外力作用下,被测对象表面产生微小机械变形时,应变片敏感栅也随同变形,其电阻值发生相应变化。通过转换电路转换为相应的电压或电流的变化,根据式(2-3),可以得到被测对象的应变值ε,而根据引力应变关系 б=Eε(2-4) 式中б——测试的应力;
基于单片机的超声波测距系统实验报告
基于单片机的超声波测距系统实验报告
一、实验目的 1.了解超声波测距原理; 2.根据超声波测距原理,设计超声波测距器的硬件结构电路; 3.对设计的电路进行分析能够产生超声波,实现超声波的发送与接收,从而实现利用 超声波方法测量物体间的距离; 4.以数字的形式显示所测量的距离; 5.用蜂鸣器和发光二极管实现报警功能。 二、实验容 1.认真研究有关理论知识并大量查阅相关资料,确定系统的总体设计方案,设计出系 统框图; 2.决定各项参数所需要的硬件设施,完成电路的理论分析和电路模型构造。 3.对各单元模块进行调试与验证; 4.对单元模块进行整合,整体调试; 5.完成原理图设计和硬件制作; 6.编写程序和整体调试电路; 7.写出实验报告并交于老师验收。 三、实验原理 超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距S=Ct/2,式中的C为超声波波速。由于超声波也是一种声波,其声速C与温度有关。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。声速确定后,只要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理,单片机(AT89C51)发出短暂的40kHz信号,经放大后通过超声波换能器输出;反射后的超声波经超声波换能器作为系统的输入,锁相环对此信号锁定,产生锁定信号启动单片机中断程序,得出时间t,再由系统软件对其进行计算、判别后,相应的计算结果被送至LED显示电路进行显示。 (一)超声波模块原理: 超声波模块采用现成的HC-SR04超声波模块,该模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm。模块包括超声波发射器、接收器与控制电路。基本工作原理:采用 IO 口 TRIG 触发测距,给至少 10us 的高电平信号;模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。实物如下图1。其中VCC 供5V 电源,GND 为地线,TRIG 触发控制信号输入,ECHO 回响信号输出等四支线。
传感器实验报告 (2)
传感器实验报告(二) 自动化1204班蔡华轩 U201113712 吴昊 U201214545 实验七: 一、实验目的:了解电容式传感器结构及其特点。 二、基本原理:利用平板电容C=εA/d 和其它结构的关系式通过相应的结 构和测量电路可以选择ε、A、d 中三个参数中,保持二个参数不变,而 只改变其中一个参数,则可以有测谷物干燥度(ε变)测微小位移(变d)和测量液位(变A)等多种电容传感器。 三、需用器件与单元:电容传感器、电容传感器实验模板、测微头、相敏 检波、滤波模板、数显单元、直流稳压源。 四、实验步骤: 1、按图6-4 安装示意图将电容传感器装于电容传感器实验模板上。 2、将电容传感器连线插入电容传感器实验模板,实验线路见图7-1。图 7-1 电容传感器位移实验接线图 3、将电容传感器实验模板的输出端V01 与数显表单元Vi 相接(插入主控 箱Vi 孔),Rw 调节到中间位置。 4、接入±15V 电源,旋动测微头推进电容传感器动极板位置,每间隔0.2mm 图(7-1) 五、思考题: 试设计利用ε的变化测谷物湿度的传感器原理及结构,并叙述一 下在此设计中应考虑哪些因素? 答:原理:通过湿度对介电常数的影响从而影响电容的大小通过电压表现出来,建立起电压变化与湿度的关系从而起到湿度传感器的作用;结构:与电容传感器的结构答大体相同不同之处在于电容面板的面积应适当增大使测量灵敏度更好;设计时应考虑的因素还应包括测量误差,温度对测量的影响等
六:实验数据处理 由excle处理后得图线可知:系统灵敏度S=58.179 非线性误差δf=21.053/353=6.1% 实验八直流激励时霍尔式传感器位移特性实验 一、实验目的:了解霍尔式传感器原理与应用。 二、基本原理:霍尔式传感器是一种磁敏传感器,基于霍尔效应原理工作。 它将被测量的磁场变化(或以磁场为媒体)转换成电动势输出。 根据霍尔效应,霍尔电势UH=KHIB,当霍尔元件处在梯度磁场中 运动时,它就可以进行位移测量。图8-1 霍尔效应原理 三、需用器件与单元:霍尔传感器实验模板、霍尔传感器、直流源±4V、± 15V、测微头、数显单元。 四、实验步骤: 1、将霍尔传感器按图8-2 安装。霍尔传感器与实验模板的连接 按图8-3 进行。1、3 为电源±4V,2、4 为输出。图8-2 霍尔 传感器安装示意图 2、开启电源,调节测微头使霍尔片在磁钢中间位置再调节RW2 使数显表指示为零。
超声波传感器及其测距原理
安全避障是移动机器人研究的一个基本问题。障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、硬件容易实现等优点,被广泛用作测距传感器。本超声波测距系统选用了SensComp公司生产的Polaroid 6500系列超声波距离模块和600系列传感器,微处理器采用了ATMEL公司的AT89C51。本文对此超声波测距系统进行了详细的分析与介绍。 1、超声波传感器及其测距原理 超声波是指频率高于20KHz的机械波[1]。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压电效应[1]的原理将电能和超声波相互转 化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。 超声波测距的原理一般采用渡越时间法TOF(time of flight)[2]。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的
声源与障碍物之间的距离,即 1、硬件电路设计 我们设计的超声波测距系统由Polaroid 600系列传感器、Polaroid 6500系列超声波距离模块和AT89C51单片机构成。 2.1 Polaroid 600系列传感器 此超声波传感器是集发送与接收一体的一种传感器。传感器里面有一个圆形的薄片,薄片的材料是塑料,在其正面涂了一层金属薄膜,在其背面有一个铝制的后板。薄片和后板构成了一个电容器,当给薄片加上频率为49.4kHz、电压为300VAC pk-pk的方波电压时,薄片以同样的频率震动,从而产生频率为49.4kHz的超声波。当接收回波时,Polaroid 6500内有一个调谐电路,使得只有频率接近49.4kHz的信号才能被接收,而其它频率的信号则被过滤。 Polaroid 600超声传感器发送的超声波具有角度为30度的波束角[3],如图1所示:
超声波传感器测距仪设计报告(全)-张哲铭
单片机、传感器、印制电路板 课程整合实训 电子产品设计与制作 技术报告 (2013——2014 学年第二学期) 项目名称:超声波测距仪设计 指导教师:卢建声,曾庆波,代瑶 专业:微电子技术 班级:12微电子 组长:张哲铭 组员:高金阁,李雨泽,苏程龙黑龙江信息技术职业学院·电子工程系
目录 任务书...................................................................... 错误!未定义书签。 一、工作任务 ................................................................. 错误!未定义书签。 二、工作目标 (3) 三、主要设计内容 (3) 1.原理设计 (3) 2.原理框图 (3) 3原理图 (4) 4元件清单 (4) 五、提交成果 ................................................................. 错误!未定义书签。 一、原理设计与技术路线 .............................................. 错误!未定义书签。 1、原理图绘制......................................................... 错误!未定义书签。 2、PCB图绘制.......................................................... 错误!未定义书签。 3、单元电路设计..................................................... 错误!未定义书签。 4、整机设计 ............................................................ 错误!未定义书签。 (5) (6) 六、总结报告 (10) 附录 (13) 超声波测距仪设计
传感器测速实验报告(第一组)
传感器测速实验报告 院系: 班级: 、 小组: 组员: 日期:2013年4月20日
实验二十霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平 三、需用器件与单元 霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。 四、实验步骤 1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。 图 9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。 3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。 4、将转速调解中的转速电源引到转动源的电源插孔。 5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。 6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理 1、记录频率计输出频率数值如下表所示: 电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了十二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
传感器与检测技术试卷及答案
1.属于传感器动态特性指标的是(D ) A 重复性 B 线性度 C 灵敏度 D 固有频率 2 误差分类,下列不属于的是(B ) A 系统误差 B 绝对误差 C 随机误差 D粗大误差 3、非线性度是表示校准(B )的程度。 A、接近真值 B、偏离拟合直线 C、正反行程不重合 D、重复性 4、传感器的组成成分中,直接感受被侧物理量的是(B ) A、转换元件 B、敏感元件 C、转换电路 D、放大电路 5、传感器的灵敏度高,表示该传感器(C) A 工作频率宽 B 线性围宽 C 单位输入量引起的输出量大 D 允许输入量大 6 下列不属于按传感器的工作原理进行分类的传感器是(B) A 应变式传感器 B 化学型传感器 C 压电式传感器 D热电式传感器 7 传感器主要完成两个方面的功能:检测和(D) A 测量 B感知 C 信号调节 D 转换 8 回程误差表明的是在(C)期间输出输入特性曲线不重合的程度 A 多次测量 B 同次测量 C 正反行程 D 不同测量 9、仪表的精度等级是用仪表的(C)来表示的。 A 相对误差 B 绝对误差 C 引用误差 D粗大误差 二、判断 1.在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在改变条件时,按一定规律变化的误差称为系统误差。(√) 2 系统误差可消除,那么随机误差也可消除。(×) 3 对于具体的测量,精密度高的准确度不一定高,准确度高的精密度不一定高,所以精确度高的准确度不一定高(×) 4 平均值就是真值。(×) 5 在n次等精度测量中,算术平均值的标准差为单次测量的1/n。(×) 6.线性度就是非线性误差.(×) 7.传感器由被测量,敏感元件,转换元件,信号调理转换电路,输出电源组成.(√) 8.传感器的被测量一定就是非电量(×) 9.测量不确定度是随机误差与系统误差的综合。(√) 10传感器(或测试仪表)在第一次使用前和长时间使用后需要进行标定工作,是为了确定传感器静态特性指标和动态特性参数(√) 二、简答题:(50分) 1、什么是传感器动态特性和静态特性,简述在什么频域条件下只研究静态特性就能够满足通常的需要,而在什么频域条件下一般要研究传感器的动态特性? 答:传感器的动态特性是指当输入量随时间变化时传感器的输入—输出特性。静态特性是指当输入量为常量或变化极慢时传感器输入—输出特性。在时域条件下只研究静态特性就能够满足通常的需要,而在频域条件下一般要研究传感器的动态特性。 2、绘图并说明在使用传感器进行测量时,相对真值、测量值、测量误差、传感器输入、输出特性的概念以及它们之间的关系。 答:框图如下: 测量值是通过直接或间接通过仪表测量出来的数值。 测量误差是指测量结果的测量值与被测量的真实值之间的差值。
超声波测距
总体方案 本设计主要是进行距离的测量和报警,设计中涉及到的内容较多,主要是将单片机控制模块、超声波测距模块、蜂鸣器报警模块、4位数码管显示模块这几个模块结合起来。而本设计的核心是超声波测距模块,其他相关模块都是在测距的基础上拓展起来的,测距模块是利用超声波传感器,之后选择合适单片机芯片,以下就是从相关方面来论述的。 超声波测距仪 超声波是一种超出人类听觉极限的声波即其振动频率高于20 kHz的机械波。超声波传感器在工作的时候就是将电压和超声波之间的互相转换,当超声波传感器发射超声波时,发射超声波的探头将电压转化的超声波发射出去,当接收超声波时,超声波接收探头将超声波转化的电压回送到单片机控制芯片。超声波具有振动频率高、波长短、绕射现象小而且方向性好还能够为反射线定向传播等优点,而且超声波传感器的能量消耗缓慢有利于测距。在中、长距离测量时,超声波传感器的精度和方向性都要大大优于红外线传感器,但价格也稍贵。从安全性,成本、方向性等方面综合考虑,超声波传感器更适合设计要求。 综合上述三种测距仪的对比,本实验选着超声波测距仪。 系统方案 本系统选择52单片机作为控制系统核心,所测得的距离数值由4位共阴极数码管显示,与障碍物之间的不同距离利用蜂鸣器频率的不同报警声提示,超声波发射信号由52单片机的P1.0口送出到超声波发射电路,将超声波发送出去,报警系统由蜂鸣器电路构成。本设计中将收发超声波的探头分离这样不会使收发信号混叠,从而能避免干扰,可以很好的提高系统的可靠性。系统框图如下:
硬件设计 超声波测距模块 模块功能 该模块利用超声波测距仪,测试小车与障碍物之间的距离,当距离小于某一给定值时,利用程序,将信号传递给单片机的某个引脚。其他控制模块检测该引脚的电平高低,根据电平的高低,控制小车的行驶状态。 基本实现原理 超声波接收器 放大器 检波电路 显示模块 51单片机 放大电路 报警模块 超声波接收器
超声波测距实验报告
电子信息系统综合设计报告 超声波测距仪
目录 摘要 (3) 第一章绪论 (3) 1.1 设计要求 (3) 1.2 理论基础 (3) 1.3 系统概述 (4) 第二章方案论证 (4) 2.1 系统控制模块 (5) 2.2距离测量模块 (5) 2.3 温度测量模块 (5) 2.4 实时显示模块 (5) 2.5 蜂鸣报警模块 (6) 第三章硬件电路设计 (6) 3.1 超声波收发电路 (6) 3.2 温度测量电路 (7) 3.3 显示电路 (8) 3.4 蜂鸣器报警电路 (9) 第四章软件设计 (10) 第五章调试过程中遇到的问题及解决 (11) 5.1 画PCB及制作 (11) 5.2 焊接问题及解决 (11) 5.3 软件调试 (11) 实验总结 (13) 附件 (14) 元器件清单 (14) HC-SR04超声波测距模块说明书 (15) 电路原理图 (17) PCB图 (17) 程序 (18)
摘要 该系统是一个以单片机技术为核心,实现实时测量并显示距离的超声波测距系统。系统主要由超声波收发模块、温度补偿电路、LED显示电路、CPU处理电路、蜂鸣器报警电路等5部分组成。系统测量距离的原理是先通过单片机发出40KHz 方波串,然后检测超声波接收端是否接收到遇到障碍物反射的回波,同时测温装置检测环境温度。单片机利用收到回波所用的时间和温度补偿得到的声速计算出距离,显示当前距离与温度,按照不同阈值进行蜂鸣报警。由于超声波检测具有迅速、方便、计算简单、易于做到实时控制的特点,并且在测量精度方面能达到工业实用的要求,因此在生产生活中得到广泛的应用,例如超声波探伤、液位测量、汽车倒车雷达等。 关键词:超声波测距温度测量单片机 LED数码管显示蜂鸣报警 第一章绪论 1.1设计要求 设计一个超声波测距仪,实现以下功能: (1)测量距离要求不低于2米; (2)测量精度±1cm; (3)超限蜂鸣器或语音报警。 1.2理论基础 一、超声波传感器基础知识 超声波传感器是利用晶体的压电效应和电致伸缩效应,将机械能与电能相互转换,并利用波的特性,实现对各种参量的测量。 超声波的传播速度与介质的密度和弹性特性有关,与环境条件也有关: 在气体中,超声波的传播速度与气体种类、压力及温度有关,在空气中传播速度为C=331.5+0.607t/0C (m/s) 式中,t为环境温度,单位为0C. 二、压电式超声波发生器原理 压电式超声波发生器实际上是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。 三、超声波测距原理 由于超声波指向性强,能量消耗缓慢,在空气中传播的距离较远,因而超声波
实验二红外测距传感器实验
信息工程学院实验报告 课程名称: 传感器原理及应用 实验项目名称: 实验二 红外测距传感器实验 实验时间: 班级: 姓名: 学号: 一、实 验 目 的 1. 学习 CC2530 单片机 ADC 模块的使用。 2. 学习红外测距传感器的使用。 二、实 验 原 理 1. CC2530 节点与红外测距传感器的硬件接口 红外线测距传感器模块GP2Y0A21YK0F
(1). 红外测距传感器模块(GP2Y0A21YK0F)引脚 OUT:模拟量输出接口(AD 模块) GND:外接GND VCC:数字量输出接口(0 和1) 外接5V 电源 (2). 传感器模块与CC2530 模块之间的连接 2. ADC (1). 简介 CC2530单片机的ADC支持多达14位的模拟数字转换,具有多达12位的ENOB(有效数字位)。它包括一个模拟多路转换器,具有多达8个各自可配置的通道;以及一个参考电压发生器。转换结果通过DMA写入存储器。还具有若干运行模式。ADC模块的方框图如下所示: ADC的主要特性如下:
●可选的抽取率,这也设置了分辨率(7到12位) ●8个独立的输入通道,可接受单端或差分信号 ●参考电压可选为内部单端、外部单端、外部差分或A VDD5 ●产生中断请求 ●转换结束时的DMA触发 ●温度传感器输入 ●电池测量功能 (2). 寄存器简介 本次实验中主要涉及到ADC模块的寄存器:
数据的换算: 例如:在CC2530 中配置ADC 的参考电压为A VDD5(3.3V),抽取率为512(12 位有效数据),由于在实验中采用单端转换方式,所以实际数据只有11 位。这时,ADC 采集到的数据记为x,则 ADC采集数据转换为电压(单位:V):V = x * 3.3 / 2048 3. GP2Y0A21YK0F 红外测距传感器 (1). 概述 夏普GP2Y0A21YK0F 测距传感器是基于PSD 的微距传感器,其有效的测量距离在80cm 内,有效的测量角度大于40 度,输出信号为模拟电压,在0 到8cm 左右的范围内与距离成正比非线性关系,在10-80cm 的距离范内成反比非线性关系,平均功耗为30mA,反应时间约为5ms,并且对背景光及温度的适应性较强。GP2Y0A21YK0F 传感器的默认的测距分辨率为1mm。
超声波测距实验报告
目录 1、课题设计的目的和意义 (3) 2、课题要求 (3) 2.1、基本功能要求 (3) 2.2、提高要求 (4) 3、重要器件功能介绍 (4) 3.1、CX20106A红外线发射接收专用芯片 (4) 3.2、AT89C51系列单片机的功能特点 (5) 3.3、ISD1700优质语音录放电路 (6) 4、超声波测距原理 (8) 4.1、超声波测距原理图 (8) 4.2、超声波测距的基本原理 (9) 5、硬件系统设计 (10) 5.1、超声波发射单元 (10) 5.2、超声波接收单元 (11)
5.3、显示单元 (11) 5.4、语音单元 (12) 5.5、硬件设计中遇到的难题: (12) 6、系统软件设计 (14) 7、调试与分析 (15) 7.1调试 (15) 7.2误差分析 (15) 8、总结 (16) 9、附件 (17) 9.1、总电路 (17) 9.2、主要程序 (18) 10、参考文献 (22)
1课题设计的目的及意义 随着科学技术的快速发展,超声波在测距仪中的应用越来越广,但就目前技术水平而言,人们可以利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。展望未来,超声波测距作为一种新型的非常重要有用的工具在各方面都有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求。如声纳的发展趋势:研究具体的高定位精度的被动测距声纳,以满足军事和渔业等的发展需求,实现远程的被动探测和识别。毋庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。 超声波测距在某些场合有着显著的优点,因为这种方法是利用计算超声波在被测物体和超声波探头之间的传输来测量距离的,因此它是一种非接触式的测量,所以他就能够在某些场合或环境比较恶劣的环境下使用。比如测有毒或者有腐蚀性化学物质的液面高度或者高速公路上快速行驶汽车之间的距离。 随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最注重发展到具有创造力。在新的时代,测距仪将发挥更大的作用。 2课题要求 以单片机AT89C51为中心控制单元,配以超声波发射、接收装置,实现超声波发射及接收其遇到障碍物发生反射形成的回波信号,并根据超声波在介质中的传播速度及超声波从发射到接收到回波的时间,计算出发射点距障碍物的距离,设计出一套基于单片机的脉冲反射式超声波测距系统,利用单片机进行操作控制,用数码管作输出显示,设计发射、接收、检测、显示硬件电路和测距系统软件。
传感器实验
传感器综合实验 前提:电阻应变式传感器 电阻应变式传感器以电阻应变计为转换元件的电阻式传感器。电阻应变式传感器由弹性敏感元件、电阻应变计、补偿电阻和外壳组成,可根据具体测量要求设计成多种结构形式。弹性敏感元件受到所测量的力而产生变形,并使附着其上的电阻应变计一起变形。电阻应变计再将变形转换为电阻值的变化,从而可以测量力、压力、扭矩、位移、加速度和温度等多种物理量。传感器中的电阻应变片具有金属的应变效应,即在外力作用下产生机械形变,从而使电阻值随之发生相应的变化。电阻应变片主要有金属和半导体两类,金属应变片有金属丝式、箔式、薄膜式之分。半导体应变片具有灵敏度高(通常是丝式、箔式的几十倍)、横向效应小等优点。 一.实验目的 (1)加深对应力和应变概念的理解; (2)了解金属箔式应变片,单臂单桥的工作原理和工作情况; (3)验证单臂,半桥,全桥的性能及相互之间关系; (4)了解温度对应变测试系统的影响; (5)了解传感器(电阻应变片)在检测中的应用。 二.实验仪器: 直流稳压电源,15V不可调直流稳电源,差动放大器,电桥,F/V表,测微头,双平行梁,双孔悬臂梁称重传感器,应变片,砝码,加热器,水银温度计(自备),主,副电源。 三.实验原理 要测量模拟金属梁的应力,首先引入描述物体变形的物理量“应变”。设模拟金属梁原长为l的一段,在变形时发生“伸长”或“缩短”量为,则应变为 应变的大小,即与外力F的大小及应用位置有关,也与材料本身的弹性有关。根据胡克定律, 由上式可知,应变最大处,应力也最大。但应力是内力,无法直接测量,应先测量应变后换算出应力。而应变又可用电阻应变片将转换成易于放大的电压、电流或功率的变化进行测量。 因此,应力就可以测出。 (1)模拟金属梁的设置 如图,它是用长150毫米、宽17毫米的钢尺做成,其上下表面各贴有3片电阻应变片。上表面的应变片受力,下表面的应变片受压。拉区电阻值增大,压区电阻值变小。
电容传感器测量电路
第一部分引言 本设计是应用于电容传感器微小电容的测量电路。 传感器是一种以一定的精度把被测量转换为与之有确定对应关系的、便于应用的某种物理量的测量装置。传感器在发展经济、推动社会进步方面有着重要作用。 电容式传感器是将被测量转换成电容量变化的一种装置,可分为三种类型:变极距(间隙)型、变面积型和变介电常数型。 二、电容式传感器的性能 和其它传感器相比,电容式传感器具有温度稳定性好、结构简单、适应性强、动态响应好、分辨力高、工作可靠、可非接触测量、具有平均效应等优点,并能在高温、辐射和强烈振动等恶劣条件下工作,广泛应用于压力、位移、加速度、液位、成分含量等测量之中[1]。 电容式传感器也存在不足之处,比如输出阻抗高、负载能力差、寄生电容影响大等。上述不足直接导致其测量电路复杂的缺点。但随着材料、工艺、电子技术,特别是集成电路的高速发展,电容式传感器的优点得到发扬,而它所存在的易受干扰和分布电容影响等缺点不断得以克服。电容式传感器成为一种大有发展前途的传感器[2]。 第二部分正文 一、电容式传感器测量电路 由于体积或测量环境的制约,电容式传感器的电容量一般都较小,须借助于测量电路检出这一微小电容的增量,并将其转换成与其成正比的电压、电流或者电频率[3],[4]。电容式传感器的转换电路就是将电容式传感器看成一个电容并转换成电压或其他电量的电路。电容传感器性能很大程度上取决于其测量电路的性能。
由于电容传感器的电容变化量往往很小,电缆杂散电容的影响非常明显,系统中总的杂散电容远大于系统的电容变化值[5]。与被测物理量无关的几何尺寸变化和温度、湿度等环境噪声引起的传感器电容平均值和寄生电容也不可避免的变化,使电容式传感器调理电路设计相当复杂[6]。分立元件过多也将影响电容的测量精度[3]。 微小电容测量电路必须满足动态范围大、测量灵敏度高、低噪声、抗杂散性等要求。测量仪器应该有飞法(fF)数量级的分辨率[6]。 二、常用电容式传感器测量电路 1、调频电路 这种电路的优点在于:频率输出易得到数字量输出,不需A/D转换;灵敏度较高;输出信号大,可获得伏特级的直流信号,便于实现计算机连接;抗干扰能力强,可实现远距离测量[7]。不足之处主要是稳定性差。在使用中要求元件参数稳定、直流电源电压稳定,并要消除温度和电缆电容的影响。其输出非线性大,需误差补偿[8]。 2、交流电桥电路 电桥电路灵敏度和稳定性较高,适合做精密电容测量;寄生电容影响小,简化了电路屏蔽和接地,适合于高频工作。但电桥输出电压幅值小,输出阻抗高,其后必须接高输入阻抗放大器才能工作,而且电路不具备自动平衡措施,构成较复杂[9]。此电路从原理上没有消除杂散电容影响的问题,为此采取屏蔽电缆等措施,效果不一定理想[10]。 3、双T型充放电网络 这种电路线路简单,减小了分布电容的影响,克服了电容式传感器高内阻的缺点,适用
超声波传感器测量距离
一、超声波测距原理 超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S ,即: S = v·△t /2 ① 这就是所谓的时间差测距法。 由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T 时, 超声波传播速度V 的计算公式为: V = 331.45 + 0.607T ② 声 速 确 定 后, 只 要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。 二、系统硬件电路设计
图2 超声波测距仪系统框图 基于单片机的超声波测距仪框图如图2所示。该系统由单片机定时器产生40KHZ的频率信号、超声波传感器、接收处理电路和显示电路等构成。单片机是整个系统的核心部件,它协调和控制各部分电路的工作。工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。下面分别介绍各部分电路: 1 、超声波发射电路 超声波发射电路如图3所示,89C51通过外部引脚P1.0 输出脉冲宽度为250μs , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远,可对振荡信号进行功率放大后再加在超声波传感器上。 图3中T为超声波传感器,是超声波测距系统中的重要器件。利用逆压电效应将加在其上的电信号转换为超声机械波向外辐射; 利用压电效应可以将作用在它上面的机械振动转换为相应的电信号, 从而起到能量转换的作用。市售的超声
传感器实验二
传感器实验二-----移相器和相敏检波器电路性能实验 -----陈晨毅1230230048 一.实验原理。 1.移相器的电路组成:移相器由两级运算放大器构成,其中,运算放大器A1与移相网络R1、R2、W1、C1构成微分电路,实现超前移相器。运算放大器A2与移相网络R4、R5、W2、C2构成积分电路,实现滞后移相器。改变W1和W2的大小,可以改变输出信号的相位,图为移相电路示意图。 图1 移相器电路原理图 2.相敏检波器的电路组成:能够鉴别调制信号的相位,同时还具有选频能力的电子电路,称为相敏检波器,实验仪中的相敏检波器电路组成与面板布局如图所示: 图2 相敏检波电路原理图 相敏检波器模块主要由三部分组成:一是由运算放大器A1构成的整形电路部分,用于对参考信号的处理;二是由场效应管构成的电子开关电路部分,控制相敏检波器;三是由运算放大器A2构成的相敏检波器部分。当(2)端的控制电压为高电平时,二极管D截止,开关管栅极G为低电平,BG截止,相当开关断开。此时,相敏检波器为反相运算放大器,输入与输出信号反相。当(2)端的控制电压为低电平时,二极管D导通,开关管栅极G为高电平,BG导通,相当开关接通。此时,相敏检波器为同相运算放大器,输入与输出信号相同。 二.实验过程。
移相器实验: 1.将音频振荡器的信号引入移相器的输入端(音频信号从0°、180°插口输出均可),开启主、副电源。 2.将示波器的两根线分别接到移相的输入和输出端,调整示波器,观察示波器的波形。 3.调节移相器上的点位器,观察两个波形间相位的变化。 4.改变音频振荡器的频率,观察不同频率的最大移相范围。 相敏检波器实验: 1.根据图的电路接线,将音频振荡器的信号0°输出端输出至相敏检波器的输入端(4),把直流稳压电源+2V输出接至相敏检波器的参考输入端(1),把示波器两根输入线分别接至相敏检波器的输入端(4)和输出端(6)组成一个测量线路。 2.调整好示波器,开启主、副电源,调整音频振荡器的幅度旋钮,示波器输出电压为峰 峰值4V。观察输入和输出波的相位和幅值关系。 3.改变参考电压的极性,观察输入和输出波形的相位和幅值关系。由此可得出结论,当参考电压为正时,输入和输出同相,当参考电压为负时,输入和输出反相。 4.关闭主、副电源,根据图电路重新接线,将音频振荡器的信号从0°输出端输出至相敏检波器的输入端(4),将从0°输出端输出接至相敏检波器的参考输入端(5),把示波器的两根输入线分别接至相敏检波器的输入(4)和输出端(6),将相敏检波器输出端(6)同时与低通滤波器的输入端连接起来,将低能滤波器的输出端与直流电压表连接起来,组成一个测量线路。(此时,F/V表置于V表20V档)。 5.开启主、副电源,调整音频振荡器的输出幅度,同时记录电压表的读数,填入下表。单位:V Vip-p 0.5 1 2 3 4 8 16 Vo
实验二,电容式传感器
实验二差动电容传感器应用 一、实验目的: 1、了解电容式传感器的结构及其特点。 2、了解电容式传感器的动态性能及测量原理与方法。 二、实验原理: 利用平板电容C=εA/d的关系,在ε、A、d中三个参数中,保持二个参数不变,而只改变其中一个参数,就可使电容的容量(C)发生变化,通过相应的测量电路, 图2-1 电容传感器位移实验接线图 将电容的变化量转换成相应的电压量,则可以制成多种电容传感器,如:①变ε的湿度电容传感器。②变d的电容式压力传感器。③变A的电容式位移传感器。本实验采用第③种电容传感器,是一种圆筒形差动变面积式电容传感器。 利用电容式传感器动态响应好,灵敏度高等特点,可进行动态位移测量。 三、需用器件与单元: 电容传感器、电容传感器实验模板、测微头、移相/相敏检波/滤波模板、数显单元、直流稳压电源。低通滤波模板、数显单元、双线示波器,振动台(2000型)或振动测量控制仪(9000型)。 四、实验步骤: 1、按图2-2将电容传感器装于电容传感器实验模板上。 图2-2 差动变压器电容传感器安装示意图 2、将电容传感器连线插入电容传感器实验模板,实验线路见图2-1。 3、将电容传感器实验模板的输出端V01与数显电压表Vi相接,电压表量程置2V档,
Rw调节到中间位置。 4、接入±15V电源,将测微头旋至10mm处,活动杆与传感器相吸合,调整测微头的左右位置,使电压表指示最小,并将测量支架顶部的镙钉拧紧,旋动测微头,每间隔0.2mm 记下输出电压值(V),填入表4-1。将测微头回到10mm处,反向旋动测微头,重复实验过程。 表2-1电容式传感器位移与输出电压的关系 5、根据表2-1数据计算电容传感器的灵敏度S和非线性误差δf,分析误差来源。 6、按图2-3安装传感器,并按图2-1接线。实验模板输出端V01接低通滤波器输入端、低通滤波器输出端V。接示波器一个通道(示波器X轴为20ms/div、Y轴示输出大小而变)。调节传感器连接支架高度,使V01输出在零点附近。 图2-3 电容传感器振动测量安装示意图 7、将低频信号接入振动源,振动频率选6~12Hz之间,幅度旋钮置最小。 8、将±15V电源接到实验模板上,调节低频振荡器的频率与幅度旋钮使振动台振动幅度适中,注意观察示波器上显示的波形。 9、保持低频振荡器幅度旋钮不变,改变振动频率,从示波器上读出传感器实验模板输出电压V01峰-峰值。 10、作出幅频特性曲线,考虑一下这条曲线是传感器的特性还是振动梁的特性? 五、思考题: 1、试设计一个利用ε的变化测谷物湿度的电容传感器?能否叙述一下在设计中应考虑哪些因素? 2、为了进一步提高电容传器的灵敏度,本实验用的传感器可作何改进? 如何设计成容栅式传感器? 3、本实验采用的是差动变面积式电容传感器,根据下面提供的电容传感器尺 寸,计算在移动0.5mm时的电容变化量(△c)。传感器外圆筒半径R=8mm,内圆筒 半径r=7.25mm,当活动杆处于中间位置时,外圆与内圆覆盖部分长度L=16mm。