禾川 E伺服报警处理方法
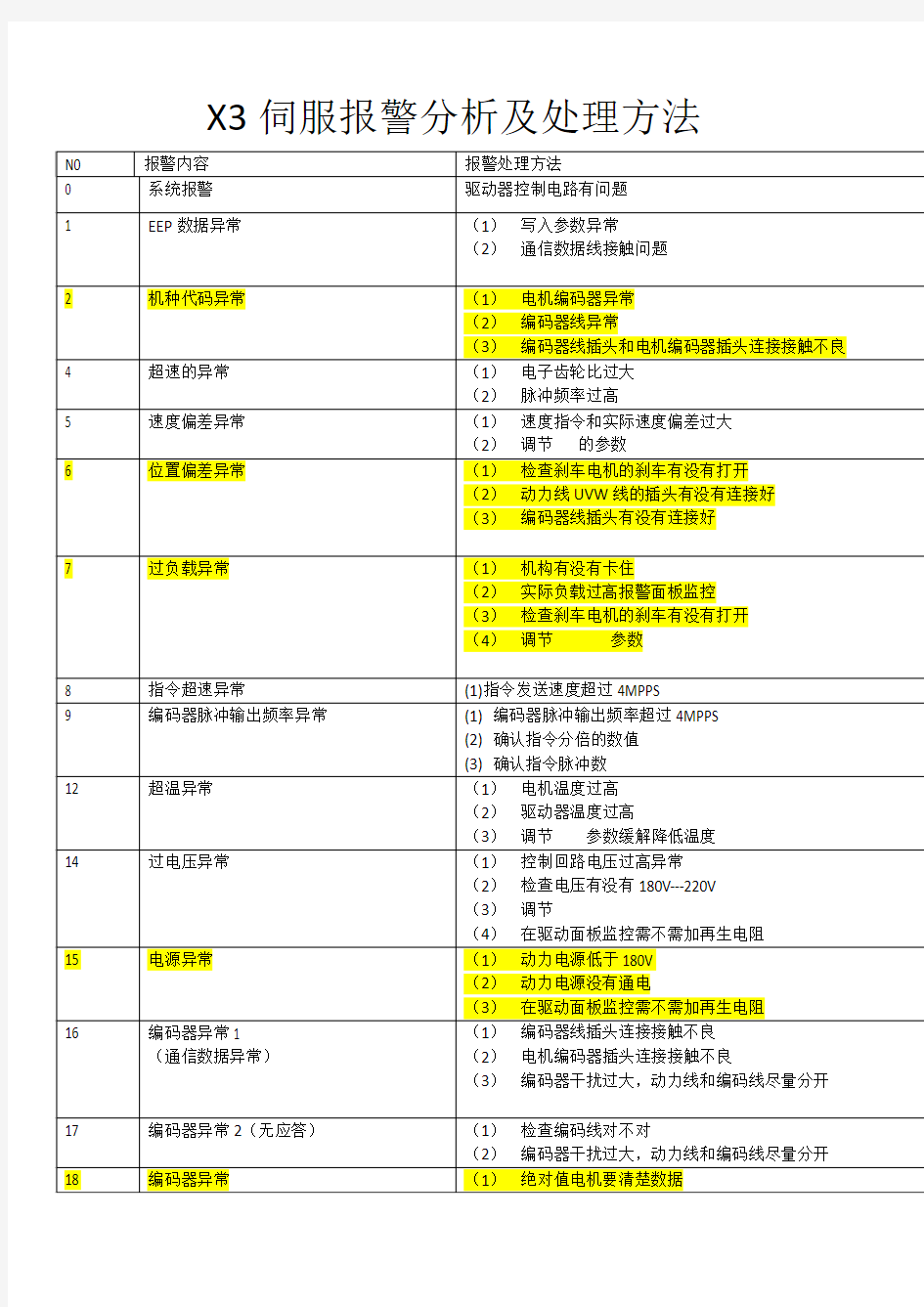
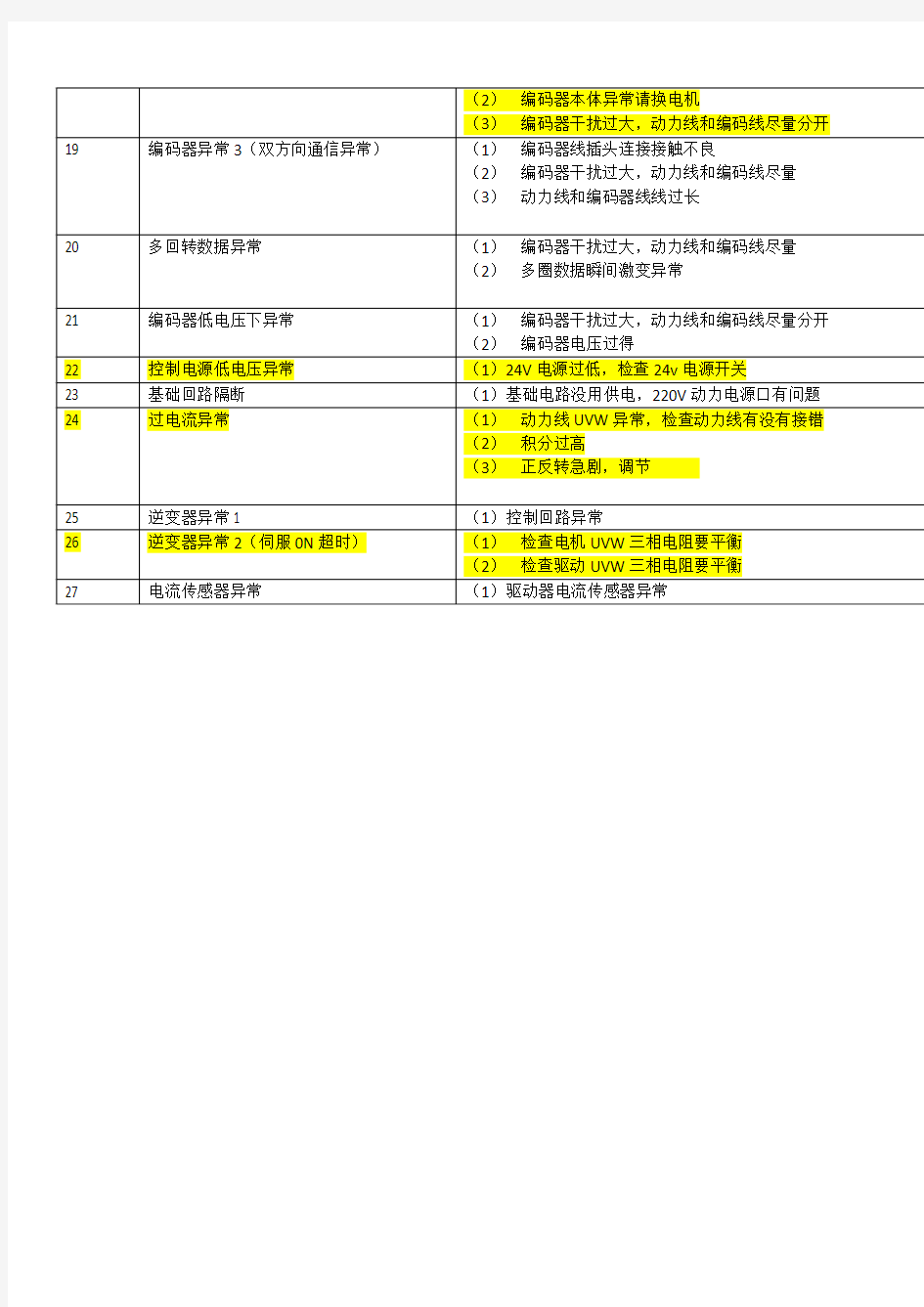
X3伺服报警分析及处理方法
X3E伺服报警分析及处理方法
台达伺服问答
01、问台达交流伺服系统ASDA-M系列所提供DI/O功能与交流伺服系统ASDA-A2系列有何差异? 答台达交流伺服系统ASDA-M系列各轴各提供6个DI,3个DO;共有18个DI,9个DO。 交流伺服系统ASDA-A2则提供8个DI,5个DI。 ASDA-M系列硬件的DI与DO分别在三轴的50 PIN Connector上,透过韧体的转换,可以将各轴6个DI与3个DO整合之后分配给其他轴使用。 为避免一些共享DI重复及节省DI脚位,可透过参数设定三轴共享DI,目前提供三轴共享DI: 1.SON,伺服启动:设定数值为0101(A接点),0001(B接点) 2.ARST,异常重置: 设定数值为0102(A接点),0002(B接点) 3.EMGS,紧急停止: 设定数值为0121(A接点),0021(B接点) 在指定各轴DI/O的参数设定上,DI(P2-10~P2-15)及DO(P2-18~P2-20)功能参数设定中增加位4作为各轴DI/O的指定。
02、问当连接绝对型伺服系统时,如何设定绝对型编码器? 答设定步骤如下: 1.确认P2-69参数目前设定值(0x0èINC ;0x1èABS),P2-69如果有修改设定必须重新上电功能才会生效,此参数特性与P1-01属同一类型。 2.接上电池盒(已经连接编码器端与驱动器端,电池也安装上),首次上电会跳ALE60,此时需坐标初始化,ALE60才会消失。 3.坐标初始化有三个方法 尚未作坐标初始化时驱动器会出现ALE60,可以透过以下初始化方式排除: (1)参数法: 设定P2-08è271后,设定P2-71è0x1,,此时ALE60会消失,但是当电池电量低于 3.1V会跳ALE61,否则正常情况面板看到会出现00000。 (2)DI法: 设定ABSE(0x1D)与ABSC(0x1F),当ABSE(ON),ABSC设定由OFF变为ON,系统将进行坐标初始化,完成后编码器脉波将从重设为0且PUU将重设为P6-01数值。 (3)PR回原点法: 若设定在PR控制模式时,可以执行PR回原点方式完成坐标初始化。 4.读取马达绝对位置: (1)设定P2-70决定马达绝对位置形式及读取方式设定, P2-70,bit0,DI/O读取单位设定,读取PUU(bit0=0)或Pulse(bit0=1) P2-70,bit1,通讯读取单位设定,读取PUU(bit1=0)或Pulse(bit1=1) (2)通讯读取马达位置单位为Pulse(P2-70=2,bit1=1,bit0=0): 设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误 差清除为0),P0-51代表马达绝对位置圈数,P0-52代表马达绝对位置脉波数 (3)通讯读取马达位置单位为PUU(P2-70=0,bit1=0,bit0=0) 设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误 差清除为0),P0-51=0,P0-52代表马达绝对位置PUU 5.透过上位控制器读取马达绝对位置信息P0-51及P0-52 6.(1)当编码器电源低于 3.1V时会出现ALE61 (2)当绝对型系统初次上电尚未完成坐标初始化、编码器电源低于 1.2V或在低电压状况下更换编码器电池,均会发生ALE60:马达绝对位置遗失。 (3)使用非绝对型编码器系统时,开启绝对型功能设定P2-69=1时,会发
常见仪表常见故障及处理办法
仪表常见故障检查及分析处理 一、磁翻板液位计: 1、故障现象:a、中控远传液位和现场液位对不上或者进液排液时液位无变化;b、现场液位计和中控远传均没有问题的情况下,中控和现场液位对不上; 2、故障分析:a、在确定远传液位准确的情况下,一般怀疑为液位计液相堵塞造成磁浮子卡住,b、现场液位变送器不是线性; 3、处理办法:a、关闭气相和液相一次阀,打开排液阀把内部液体和气体全部排干净,然后再慢慢打开液相一次阀和气相一次阀,如果液位还是对不上,就进行多次重复的冲洗,直到液位恢复正常为止;b、对液位计变送器进行线性校验。 二、3051压力变送器:压力变送器的常见故障及排除 1)3051压力变送器输出信号不稳 出现这种情况应考虑A.压力源本身是一个不稳定的压力B.仪表或压力传感器抗干扰能力不强C.传感器接线不牢D.传感器本身振动很厉害E.传感器故障 2)加压变送器输出不变化,再加压变送器输出突然变化,泄压变送器零位回不去,检查传感器器密封圈,一般是因为密封圈规格原因(太软或太厚),传感器拧紧时,密封圈被压缩到传感器引压口里面堵塞传感器,加压时压力介质进不去,但是压力很大时突然冲开密封圈,压力传感器受到压力而变化,而压力再次降低时,密封圈又回位堵住引压口,残存的压力释放不出,因此传感器零位又下不来。排除此原
因方法是将传感器卸下看零位是否正常,如果正常更换密封圈再试。 3)3051压力变送器接电无输出 a)接错线(仪表和传感器都要检查) b)导线本身的断路或短路 c)电源无输出或电源不匹配 d)仪表损坏或仪表不匹配 e)传感器损坏 总体来说对3051压力变送器在使用过程中出现的一些故障分析和处理主要由以下几种方法。 a)替换法:准备一块正常使用的3051压力变送器直接替换怀疑有故障的这样可以简单快捷的判定是3051压力变送器本身的故障还是管路或其他设备的故障。 b)断路法:将怀疑有故障的部分与其它部分分开来,查看故障是否消失,如果消失,则确定故障所在,否则可进行下一步查找,如:智能差压变送器不能正常Hart远程通讯,可将电源从仪表本体上断开,用现场另加电源的方法为变送器通电进行通讯,以查看是否电缆是否叠加约2kHz的电磁信号而干扰通讯。 c)短路检测:在保证安全的情况下,将相关部分回路直接短接,如:差变送器输出值偏小,可将导压管断开,从一次取压阀外直接将差压信号直接引到差压变送器双侧,观察变送器输出,以判断导压管路的堵、漏的连通性 三、雷达液位计:
ASD伺服常见问题处理方式
ASD伺服常见问题处理方式 1,伺服驱动器输出到电机的UVW三相是否可以互换? 不可以,伺服驱动器到电机UVW的接法是唯一的。普通异步电机输入电源UVW两相互换时电机会反转,事实上伺服电机UVW任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。伺服驱动器会检测并防止飞车,因此在UVW接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警过负载ALE06。 2,伺服电机为何要Servo on之后才可以动作? 伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处于放松的状态(手可以转动电机轴)。伺服驱动器接收到Servo on信号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可以接收指令去动作,没有收到指令时是不会动作的即使有外力介入(手转不动电机轴),这样伺服电机才能实现精确定位。 3,伺服驱动器报警ALE01如何处理? 检查UVW线是否有短路。如果把UVW线与驱动器断开再通电仍然出现ALE01则是驱动器硬件故障。 4,ALE02过电压/ALE03低电压报警发生时如何处理? 首先使用万用表测量输入电压是否在允许范围内;再次是通过驱动器或伺服软件示波器监视“主回路电压”,这是直流母线电压,电压伏数应该是输入交流电压的1.414倍,正常来讲应该不会有太大的偏差。如果偏差很大需返厂重新校准。ALE02/ALE03报警是以“主回路电压”来判断的。 5,在高速运行时机台在中途有很明显的一钝,观察发现是中途有ALE03报警产生,但是一闪就消失了,如何解决这个问题? 在高速运行时会消耗很大能量,母线电压会下降,如果输入电压偏低此时就会出现ALE03报警。报警发生时伺服马上停止,母线电压恢复正常,报警自动消失,伺服会继续运行,因此看起来就是明显的一钝。这种情况多发生在使用单相电源供电时,建议主回路使用三相电源供电。参数P2-65 bit12置ON可使ALE03报警发生时,母线电压恢复后报警不会自动消失。 6,伺服驱动器报警ALE04如何处理? AB系列伺服驱动器配ECMA马达时功率不匹配上电会报警ALE04,除这种情况外刚一上电就报警ALE04就是电机编码器故障。如果在使用过程中出现ALE04报警是因为编码器信号被干扰,请查看编码器线是否是屏蔽双绞、驱动器与电机间地线是否连接,或者在编码器线上套磁环。通过ALE04.EXE软件可以监测每次Z脉冲位置AB脉冲计数是否变化,有变化则会报
伺服故障报警及处理方法
伺服故障报警及处理方法 电压过低电源电压太低。MR-E-□A:160V 以下 存储器异常1 RAM存储器异常 时钟异常印刷电路板的异常 存储器异常2 EEP-ROM异常 编码器异常1 编码器和伺服放大器之间通讯异常。 电路板异常2 CPU·零部件异常 存储器异 电机配合异常伺服放大器和伺服电机之间的配合有误。 编码器异常2 编码器和伺服放大器之间通讯异常。 主电路异常伺服放大器的伺服电机输出端(U·V·W相)接地故障。 再生制动异常制动电流超过内置再生制动电阻或再生制动选件的允许值。再生制动晶体管异常 超速转速超出了瞬时允许转速。 过流伺服放大器的输出电流超过了允许电流。 过压直流母线电压的输入在400V以上。 指令脉冲频率异常输入的指令脉冲的脉冲频率太高。 参数异常参数的设定值异常。 主电路芯子过热主电路异常过热。 伺服电机过热伺服电机的温度上升,热保护继电器动作。 过载 1 超过了伺服放大器的过载能力。负载率300%:以上负载率200%:100s以上 过载2 由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。伺服电机 的锁定时间:1s以上 误差过大偏差计数器的滞留脉冲超过编码器的分辨率×10[pulse]。
串行通讯超时RS-232C通讯的时间超过参数的设定值。 串行通讯异常伺服放大器和通讯设备(计算机等)之间出现串行通讯错误。CPU·部件异常 再生制动电流过大警告 可能会超出内置再生制动电阻或外部再生制动选件的制动 能力。 过载警告可能发生过载1,过载2报警。 伺服紧急停止警告EMG-SG之间断开。 主电路OFF警告 主电路电源断开时,伺服开启信号(SON)为ON。 伺服报警代码及处理 欠压 电源电压过低。MR-E-□A:160V 以下 <主要原因><处理方法>·电源电压太低。→检查电源系统 ·控制电源瞬间停电在60ms以上。→检查电源系统·由于电源容量过小,导致启动时电源电压下降。→检查电源系统·电源切断5秒以内在接通。→检查电源系统·伺服放大器内部故障。→更换伺服放大器存储器异常1、 时钟异常、 存储器异常2 AL.12:RAM异常 AL.13:印刷电路板异常 AL.15:EEPROM异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。
台达伺服调试经验故障排除
Q1:伺服电机与普通电机有何区别? A1:伺服电机与普通电机最大的区别在于电机转子和反馈装置。伺服电机转子表面贴有强力磁钢片,因此可以通过定子线圈产生的磁场精确控制转子的位置,并且加减速特性远高于普通电机。反馈装置可以精确反馈电机转子位置到伺服驱动器,伺服电机常用的反馈装置有光学编码器、旋转变压器等。 Q2:伺服驱动器输入电源是否可接单相220V ? A2:台达伺服1.5KW(含)以下可接单相/三相220V电源,2.0KW(含)以上只能接三相220V电源。三相电源整流出来的直流波形质量更好,质量不好的直流电源会消耗母线上电容的能量,电机急加减速时电容会对母线充放电来保持母线电压稳定,因此三相电源输入比单相电源输入伺服的特性会好一些,三相电源输入提供的电流也更大。 Q3:伺服驱动器输出到电机的UVW三相是否可以互换? A3:不可以,伺服驱动器到电机UVW的接法是唯一的。普通异步电机输入电源UVW两相互换时电机会反转,事实上伺服电机UVW任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。伺服驱动器会检测并防止飞车,因此在UVW
接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警过负载ALE06。 Q4:伺服电机为何要Servo on之后才可以动作? A4:伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处于放松的状态(手可以转动电机轴)。伺服驱动器接收到Servo on信号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可以接收指令去动作,没有收到指令时是不会动作的即使有外力介入(手转不动电机轴),这样伺服电机才能实现精确定位。
台达伺服器报警与处理
台达伺服器异警处理 RLE01:过电流:主回路电流值超越电机瞬间最大电流值1.5倍时动作 1.驱动器输出短路:检查电机与驱动器接线状态或导线本体是否短路,排除短路状态,并防止金属导体外露 2. 电机接线异常:检查电机连接至驱动器的接线顺序,根据说明书的配线顺序重新配线 3. IGBT 异常:散热片温度异常,送回经销商或原厂检修 4. 控制参数设定异常:设定值是否远大于出厂预设值,回复至原出厂预设值,再逐量修正 5. 控制命令设定异常:检查控制输入命令是否变动过于剧烈,修正输入命令变动率或开启滤波功能 RLE02:过电压:主回路电压值高于规格值时动作 1.主回路输入电压高于额定容许电压值:用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1),使用正确电压源或串接稳压器 2. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器 3. 驱动器硬件故障:当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误,送回经销商或原厂检修 RLE03:低电压:主回路电压值低于规格电压时动作 1.主回路输入电压低于额定容许电压值:检查主回路输入电压接线是否正常,重新确认电压接线 2. 主回路无输入电压源:用电压计测定是否主回路电压正常,重新确认电源开关 3. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器 RLE04:RLE04:Z 脉冲所对应磁场角度异常 1.编码器损坏:编码器异常,更换电机 2. 编码器松脱:检视编码器接头,重新安装 RLE05:回生错误:回生控制作动异常时动作 1.回生电阻未接或过小:确认回生电阻的连接状况,重新连接回生电阻或计算回生电阻值 2. .回生用切换晶体管失效:检查回生用切换晶体管是否短路,送回经销商或原厂检修 3. 参数设定错误:确认回生电阻参数(P1-52)设定值与回生电阻容量参数(P1-53)设定,重新正确设定 RLE06:过负载:电机及驱动器过负载时动作 1.超过驱动器额定负载连续使用:可由驱动器状态显示P0-02设定为11后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载 2. 控制系统参数设定不当:机械系统是否摆振、加减速设定常数过快,调整控制回路增益值、加减速设定时间减慢 3. 电机、编码器接线错误:检查U、V、W 及编码器接线是否准确 4. 电机的编码器不良:送回经销商或原厂检修 RLE07:过速度:电机控制速度超过正常速度过大时动作 1.速度输入命令变动过剧:用信号检测计检测输入的模拟电压信号是否异常,调整输入变信号动率或开启滤波功能 2. 过速度判定参数设定不当:检查过速度设定参数P2-34(过速度警告条件)是否太小,检查过速度设定参数P2-34(过速度警告条件)是否太小 RLE08:异常脉冲控制命令:脉冲命令的输入频率超过硬件界面容许值时动作 1.脉冲命令频率高于额定输入频率:用脉冲频率检测计检测输入频率是否超过额定输入频率,正确设定输入脉冲频率 RLE09:位置控制误差过大:位置控制误差量大于设定容许值时动作 1.最大位置误差参数设定过小:确认最大位置误差参数P2-35(位置控制误差过大警告条件)设定值,加大P2-35 (位置控制误差过大警告条件)设定值 2. 增益值设定过小:确认设定值是否适当,正确调整增益值 3. 扭矩限制过低:确认扭矩限制值,正确调整扭矩限制值 4. 外部负载过大:检查外部负载,减低外部负载或重新评估电机容量。更换摇床电机。 RLE10:芯片执行超时:芯片异常时动作 1.芯片动作异常:电源复位检测,复位仍异常时,送回经销商或原厂检修 RLE11:编码器异常:编码器产生脉冲信号异常时动作
加工中心常见报警及解决方法
旺磐加工中心的常见报警解决方法 序号报警内容含义解决方法 <一> plc报警问题 1.1 LUB LOW (油量过少) 1.11 检查润滑油泵的油位 1.12 检查油位传感器是否正常 1.13检查油位报警线路电源及输入电路是否正常(号码管为DC24V及LUB LOW) 1.2COOLANT OVERLOAD (切削液马达过载) 1.21 检查动力线是否有缺, 1.22 检查电源电压是否为额定电压 1.23 过载保护器的过载系数是否设定过小,正常为 2.5 1.24 马达是否为反转或者有烧毁 1.25 将上序问题排除后,将过载保护器上的复位按钮按下,再确定信号线是否有24V 电源输入(号码管为COOLANT OVERLOAD) 1.3 AXIS NOT HOME (3轴未归零) 1.31 在原点复归模式下分别将三轴归零,归完成报警信号即完成零 1.32 ATC NOT READY 刀库未准备好 1.33 刀库记数信号未到位,检查COUNTER信号
1.34 刀杯原位信号错误,检查TOOL CUP UP 信号 1.35 刀臂持刀点位置不正确,检查121点信号 1.4 THE CLAMP SIGNAL ERROR (夹刀信号错误) 1.41 检查夹刀到位信号线是否有异常 1.42 检查打刀缸夹刀开关是否正常 1.43 检查I/F诊断中X4的信号是否为1 1.5 AIR PRESSURE LOW (空气压力低) 1.51 检查空气压力是否5MP以上 1.52 检查空气压力输入信号的线路是否有DC24VV电压 1.6 ATC COUNTER SINGAL ERROR (刀库记数信号错误) 1.61 检查是否为记数信号接再刀库的144点上。 1.62 检查DC24电源144点与0V点之间电压是否为24V, 1.63确定I/F诊断中的X1E点信号是否正常! 1.7 THE SP-MOTOR OVERLOAD (主轴马达过载) 1.71 主轴马达过载,检查回升电阻AL1与AL2间是否为通路 1.72 检查PLC输入信号是否有24V
OKUMA常见报警信息及解决办法
O K U M A常见报警信息及解决 办法 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
OKUMA常见报警及解决办法 1、Y、Z轴润滑报警 报警代码为2705或2706出现该报警基本上是压力继电器信号未来,若出现润滑报警...ON则是为Y、Z轴没有润滑,从下顺时针调大压力继电器润滑量即可,反之则相反。可从主界面按选项Check第二十七页ILBYZ观察,系统设置是10分钟润滑一次,ILBYZ亮了会熄灭重复这个则为正常。若调、换了继电器还是报警则1、管子内可能有空气,将润滑管松一点启动机床留出润滑油扯紧即可。2、机床右侧导轨油润滑泵有杂质,用风枪进行清洁。 2、MCS总线电压异常 报警代码为2156,出现该报警后可等待十几分钟后再按复位可消除,若消除不了只有关机断电将驱动器取下寄回宜宾维修。拆驱动器时需注意1、取驱动器之前记好显示屏的报警以及驱动器显示的报警2、取驱动器记下驱动器薄码的编号以及维修装上去后与其他机床对比3、断电后需要等驱动器电源的红色指示灯熄灭后再拆4、每个驱动器的线都有自己号码,U代表的是顺序第几个驱动器。 3、2168或2169 MCS光栅尺异常 出现该报警时注意是哪根轴报警。将报警的那根轴的盖板打开把读数头的插头重新接一下看是否报警,如果还不能解决就将整个读数头取下用工业酒精擦拭清洁重装,如果还不能解决报警只有改为半闭环。 4、2173MCS电机过热 出现该报警检查电机的风扇是否运行,检查出是电机扇热故障还是驱动器故障。 5、机床无法调出程序 在调程序显示报警时,1、检查进电气柜的网线是否松脱2、检查进电脑主机网线是否松脱3、清理TC盘缓存。 6、1071存储版电池紧急更换 换电池时需将机床关机,在PLC模块MODE旋钮从0拨到1,开机启动选择选择选项。。。。。然后关机将电池取下并装上,启动选择选项。。。。。关机,将MODE选项拨到0重启即可。 7、2462主轴分度异常 出现该报警时或者机床主轴不能旋转时,将第一步改为1,观察U系列15-2第。。步,若为0则是头已拉紧,若为7则是头未拉紧。需要手动进行分度,将参数7改为6,第13步第1项0改为61,此时头会向下,切换到手轮调到4轴对主轴头进行旋转在到达正中间0点时按拉刀键(最下面一个键)头即会拉紧,观察15-2的参数若为还是为7则需要重复以上步骤,调节4轴位置再拉紧直到参数变为0
伺服驱动器报警解决方法..
保护功能 报警 代码 故障原因应对措施 控制电源 欠电压 11 控制电源逆变器上P、N 间电压低于规定值。1)交流电源电压太低。瞬时失电。 2)电源容量太小。 电源接通瞬间的冲击电流导致电压跌落。 3)驱动器(内部电路)有缺陷。 测量 L1C、L2C 和r、t 之间电压。 1)提高电源电压。更换电源。 2)增大电源容量。 3)请换用新的驱动器。 过电压 12 电源电压高过了允许输入电压的范围。 逆变器上 P、N 间电压超过了规定值。 电源电压太高。 存在容性负载或UPS(不间断电源),使得 线电压升高。 1)未接再生放电电阻。 2)外接的再生放电电阻不匹配,无法吸收再 生能量。 3)驱动器(内部电路)有缺陷。 测量 L1、L2 和L3 之间的相电压。 配备电压正确的电源。 排除容性负载。 1)用电表测量驱动器上P、B 间外接电阻阻值。如果读数是“∞”,说明电阻没有真正地接入。请换一个。 2)换用一个阻值和功率符合规定值的外接电阻。 3)请换用新的驱动器。 主电源 欠电压 13 当参数Pr65(主电源关断时欠电压报警触发 选择)设成1 时,L1、L3 相间电压发生瞬时 跌落,但至少是参数Pr6D(主电源关断检测 时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N 间相 电压下降到规定值以下。
1)主电源电压太低。发生瞬时失电。 2)发生瞬时断电。 3)电源容量太小。 电源接通瞬间的冲击电流导致电压跌落。 4)缺相:应该输入3 相交流电的驱动器实际输入的是单相电。 5)驱动器(内部电路)有缺陷。 测量 L1、L2、L3 端子之间的相电压。 1)提高电源电压。 换用新的电源。 排除电磁继电器故障后再重新接通电源。 2)检查Pr6D 设定值,纠正各相接线。 3)请参照“附件清单”,增大电源容量。 4)正确连接电源的各相(L1、L2、L3)线路。单相电源请只接L1、L3 端子。 5)请换用新的驱动器。 过电流 和 接地错误 14 * 流入逆变器的电缆超过了规定值。 1)驱动器(内部电路、IGBT 或其他部件) 有缺陷。 2)电机电缆(U、V、W)短路了。 3)电机电缆(U、V、W)接地了。 4)电机烧坏了。 5)电机电缆接触不良。 6)频繁的伺服ON/OFF(SRV-ON)动作导 1)断开电机电缆,激活伺服ON 信号。如果马上出现此报警,请换用新驱动器。 2)检查电机电缆,确保U、V、W 没有短路。正确的连接电机电缆。 3)检查U、V、W 与“地线”各自的绝缘电阻。如果绝缘破坏,请换用新机器。 4)检查电机电缆U、V、W 之间的阻值。如果阻值不平衡,请换用新驱动器。 5)检查电机的U、V、W 端子是否有松动或未接,应保证可靠的电气接触。 6)请换用新驱动器。 Minas A4 系列驱动器技术资料选编- 61 - 保护功能 报警 代码 故障原因应对措施
台达伺服定位控制案例
X1 Y0脉冲输出Y1正转/反转Y 脉冲清除 4DOP-A 人机 ASDA 伺服驱动器 【控制要求】 ● 由台达PLC 和台达伺服,台达人机组成一个简单的定位控制演示系统。通过PLC 发送脉冲控制伺服, 实现原点回归、相对定位和绝对定位功能的演示。 ● 下面是台达DOP-A 人机监控画面: 原点回归演示画面 相对定位演示画面
绝对定位演示画面【元件说明】
【PLC 与伺服驱动器硬件接线图】 台达伺服驱动器 码器 DO_COM SRDY ZSPD TPOS ALAM HOME
【ASD-A伺服驱动器参数必要设置】 当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。 【控制程序】
M1002 MOV K200 D1343 Y7 Y10 Y11 M20 M21 M22 M23 M24 M1334 Y12 M1346 M11 X0 X1 X3 X4 X5 X6 X7 M12 M13 设置加减速时间为 200ms Y6 M10 伺服启动伺服异常复位M0M1M2M3M4M1029 DZRN DDRVI DDRVI DDRVA DDRVA ZRST K10000 K100000K-100000K400000K-50000K5000 K20000 K20000 K200000 K200000 X2 Y0 Y0 Y0 Y0 Y0 Y1 Y1 Y1 Y1 M1M0M0M0M0M2M2M1M1M1M3M3M3M2M2M4 M4 M4 M4 M3 M0 M4 原点回归 正转圈 10跑到绝对坐标,处400000跑到绝对坐标,处 -50000定位完成后自动关闭定位指令执行伺服计数寄存器清零使能 反转圈10伺服电机正转禁止伺服电机反转禁止PLC 暂停输出脉冲伺服紧急停止伺服启动准备完毕伺服启动零速度检出伺服原点回归完成伺服定位完成伺服异常报警
台达伺服报警查询
台达伺服报警查询 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
台达伺服驱动器异警处理 RLE01:过电流:主回路电流值超越电机瞬间最大电流值倍时动作 1.驱动器输出短路:检查电机与驱动器接线状态或导线本体是否短路,排除短路状态,并防止金属导体外露2.电机接线异常:检查电机连接至驱动器的接线顺序,根据说明书的配线顺序重新配线3.IGBT异常:散热片温度异常,送回经销商或原厂检修4.控制参数设定异常:设定值是否远大于出厂预设值,回复至原出厂预设值,再逐量修正5.控制命令设定异常:检查控制输入命令是否变动过于剧烈,修正输入命令变动率或开启滤波功能 RLE02:过电压:主回路电压值高于规格值时动作 1.主回路输入电压高于额定容许电压值:用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1),使用正确电压源或串接稳压器2.电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器3.驱动器硬件故障:当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误,送回经销商或原厂检修 RLE03:低电压:主回路电压值低于规格电压时动作 1.主回路输入电压低于额定容许电压值:检查主回路输入电压接线是否正常,重新确认电压接线2.主回路无输入电压源:用电压计测定是否主回路电压正常,重新确认电源开关3.电源输入错误(非
正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器 RLE04:RLE04:Z脉冲所对应磁场角度异常 1.编码器损坏:编码器异常,更换电机2.编码器松脱:检视编码器接头,重新安装 RLE05:回生错误:回生控制作动异常时动作 1.回生电阻未接或过小:确认回生电阻的连接状况,重新连接回生电阻或计算回生电阻值2..回生用切换晶体管失效:检查回生用切换晶体管是否短路,送回经销商或原厂检修3.参数设定错误:确认回生电阻参数(P1-52)设定值与回生电阻容量参数(P1-53)设定,重新正确设定 RLE06:过负载:电机及驱动器过负载时动作 1.超过驱动器额定负载连续使用:可由驱动器状态显示P0-02设定为11后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载2.控制系统参数设定不当:机械系统是否摆振、加减速设定常数过快,调整控制回路增益值、加减速设定时间减慢3.电机、编码器接线错误:检查U、V、W及编码器接线是否准确4.电机的编码器不良:送回经销商或原厂检修 RLE07:过速度:电机控制速度超过正常速度过大时动作1.速度输入命令变动过剧:用信号检测计检测输入的模拟电压信号是否异常,调整输入变信号动率或开启滤波功能2.过速度判定参数设定不当:检查过速度设定参数P2-34(过速度警告条件)是否太小,检查过速度设定参数P2-34(过速度警告条件)是否太小
常见报警主机故障及处理
常见报警主机故障及处理Post By:2010-4-14 17:02:04 Q1: 主机加电后6160(6139)键盘无反应 A: (1)可能是新主机未编入适当地址码,首先同时按下[1][3],输入地址码为01,按※退出。 一般就可以正常使用。 (2)看主机的1、2端子是否有交流16.5伏电压?6、7端子是否有12伏直流电压?如果检 查16.5伏电压不正常可能是220伏交流电源或变压器损坏,检查更换使其供电正常。如果 主机上没有直流12伏电压输出或电压不正常送修处理 (3)检查主机到键盘的接线是否正确?如果错误请将接线按接线图正确连接 如果还没有显示请找到直接供货商送修处理。 Q2: 6160(6139)键盘显示CHECK 97 A: 一般用万用表测量电压正常为10-11伏,如果只有几伏电压或没有电压,则判断总线有短路故障或负载太大,检查总线各节点和分支使其恢复正常。; Q3: 6160(6139)键盘显示CHECK XXX A: (1)检查防区内是否有人在活动?如果有人,请他退出或默认该防区为正常。 (2)如果无人则检查该防区探测器工作是否正常?如果不正常请首先检查探测器电源。其次 检查探测器信号线是否断路。 (3)检查该防区地址码模块是否正常?如果不正常首先检查地址码模块与总线连接的接线是 否正确(正、负是否接错)?其次检查地址码模块是否损坏?必要时更换一个试试。 Q4: 6160(6139)键盘显示SYSTEM LOBAT A: (1).是否未接后备电池?如果未接则需要连接电池或默认该情况为正常。 (2)如果已连接要检查后备电池是否电压不足?(从主机上拔下来用万用表测量),电压不 足的原因首先可能充电时间不足,请继续充电。其次电池老化,需要更换Q5: 6160(6139)键盘显示SYSTEM LOBAT,不能布防。 A: 主机菜单编程05项出厂值为“0”,低电压不能布防。如果确实需要请改为“1”,低电压也可以布防。但此项改动需要慎重。 Q6: 6160(6139)键盘显示OPEN CKT,按任何键不起作用,断电重新启动无效。 A: (1)键盘接线错误,对照手册检查接线,更正错误。 (2)检查主机板是否有短路情况,如有请排除。 第二部分:2300系列主机 Q1: 236、238、2316键盘无任何显示按键无反应 A: (1). 误将[安装员密码] [*] [69] [#]做为主机复位,主机被锁定。请再用安装员密码(出厂设置012345)[*] [69] [#]操作一遍看结果?如果仍不正常显示需找到直接供货商送修处理。
常见报警及处理办法
附录三常见报警及处理办法 1、Light barrier 机械手到位报警,当机械手在取放刀区域上位时,系统将忽略这一信号,以使取放刀正常。当机械手不在取放刀区域时,只要机械手离开下限位,就产生Light barrier报警,并停止机器。 处理办法:检查机械手是否在上限位,在上限位放下机械手即可。若仍然报警,查看机械手下限位传感器灯是否亮,检查传感器螺丝是否松动,传感器是否故障,检查线路是否断开。 2、Position stop 人身安全保护对射灯,当有人或物体进入机器内并当住对射光线时,机器停止,清除障碍物或人离开后,机器才能正常工作,有两种选择:一是清除障碍物或人离开后机器立即接着工作,二是清除障碍物或人离开后按空格键才能继续工作。 3、Table stop 当主轴有转动和PIN夹打开时机器就产生Table Stop报警,并停止机器。检查PIN夹是否打开,关闭PIN夹并按空格键即可。 4、EMERGENCY STOP 机器的紧急停止信号,当急停按钮按下时即产生此报警信号,能有效中断X、Y、Z轴的伺服电机供给,所有的轴开始变得不能动作,主轴也不能运转。在检查作业时进入机器前,确认本功能有效才可进入机器作业。X、Y、Z轴驱动器及变频器亦能产生EMG此报警信号,所以在释放急停按钮,按下电脑键盘ESC后仍产生EMG报警,则检查是否有其它故障导致驱动器报警。 5、SPINPLE AIR 总气阀报警,当主气压不足时,机器停止,主轴停止,主气压满足要求,按ESC键清除报警信号,机器才能工作。 6、QIC limit alarm 压脚切换报警,指定的压脚切换到系统指定位置(大孔或者小孔),如果切换不到位即产生报警。或是如果压脚在钻板过程中离开指定位置,系统亦会报警,并停止机器。 找到故障轴后排除压脚切换故障时,检查压脚切换单元电磁阀是否动作,压脚切换装置是否有异物卡住,是否有外力撞击而导致装置无法定位。检查切换汽缸位置传感器是否有亮,传感器是否故障,传感器固定螺丝是否有松动,传感器电源线是否断路。 7、SPIN THERMAL 主轴过载报警,当任一主轴电流过大时,电机保护继电器将脱扣,这时将产生过载报警。检查主轴是否异常,排除异常之后,打开机器后背门,按下电机保护继电器黑色RESET按钮可使跳脱的开关复位。 8、Cooling Unit 冷却机异常,检查冷水机是否打开,冷水机故障依照冷水机手册进行排除。 9、Circumstance temperature 环境温度报警,当机器工作的环境温度超过28℃时即产生环境温度报警,请检测环境温度是否已超过28℃。 10、COLLET_AIR 主轴夹头报警,在主轴有转动时,若主轴夹头总气压大于0.3kg时产生此报警。检查夹头张开总气阀是否关闭或者检查线路。 11、Machine stop 当电源异常、主轴、电机、驱动器发生故障时均产生此报警,如温度过高等,检查电源线路,各驱动器、主轴、电机温度是否异常,温度线是否断开。平台或者横梁使用直线电机时增加第二级位置保护,一旦电机超过限位触发,将中断整机供电,显示此报警。 12、NO CONTACT T 接触钻断刀报警,报警后机器会自动量刀,若断刀则更换刀具,若量刀判断刀未断则为断刀误报警,检查压脚是否接地,钻板时压脚是否与板接触良好,仍有此现象发生则更换断刀检测板。 13、GRIPPER NOT UP
FANUC常见伺服报警及解决方法
FANUC常见伺服报警及解决方法 SV0301:APC报警:通信错误 1、检查反馈线,是否存在接触不良情况。更换反馈线; 2、检查伺服驱动器控制侧板,更换控制侧板; 3、更换脉冲编码器。 SV0306:APC报警:溢出报警 1、确认参数No.2084、No.2085是否正常; 2、更换脉冲编码器。 SV0307:APC报警:轴移动超差报警 1、检查反馈线是否正常; 2、更换反馈线。 SV0360:脉冲编码器代码检查和错误(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 SV0364:软相位报警(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 3、检查是否有干扰,确认反馈线屏蔽是否良好 。 SV0366:脉冲丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 2、更换脉冲编码器。 SV0367:计数丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 3、更换脉冲编码器。 SV0368:串行数据错误(内装)报警 1、检查反馈线屏蔽是否良好; 2、更换反馈线; 3、更换脉冲编码器。 SV0369:串行数据传送错误(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰源; 2、更换反馈线; 3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警 1、检查分离型接口单元SDU是否正常上电; 2、更换分离型接口单元SDU。 SV0385:串行数据错误(外置)报警 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0386:数据传送错误(外置) 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0401:伺服准备就绪信号断开 1、查看诊断No.358,根据No.358的内容转换成二进制数值,进一步确认401报警的故障点。 2、检查MCC回路; 3、检查EMG急停回路; 4、检查驱动器之间的信号电缆接插是否正常; 5、更电源单元。 同步控制中SV0407:误差过大报警 1、检查同步控制位置偏差值; 2、检查同步控制是否正常。 移动轴时SV0409报警 1、检查移动时该轴的负载情况; 2、确认机械是否卡死; 3、确认伺服参数设定是否正常; 4、更换伺服电机; 5、更换伺服驱动器。 SV0410:停止时误差过大报警 1、检查机械是否卡死; 2、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 3、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,更换电机或伺服驱动器。 SV0411:移动时误差过大报警 1、查看负载情况,若负载过大。 2、检查机械是否卡死; 3、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 4、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,伺服驱动器。
台达伺服故障查询
1.绝对型伺服系统时,绝对型编码器设置 设定步骤如下: 1.确认P2-69参数目前设定值(0x0为INC ;0x1为ABS),P2-69如果有修改设定必须重新上电功能才会生效,此参数特性与P1-01属同一类型。 2.接上电池盒(已经连接编码器端与驱动器端,电池也安装上),首次上电会跳ALE60,此时需坐标初始化,ALE60才会消失。 3.坐标初始化有三个方法 尚未作坐标初始化时驱动器会出现ALE60,可以透过以下初始化方式排除: (1)参数法: 设定P2-08为271后,设定P2-71为0x1,,此时ALE60会消失,但是当电池电量低于3.1V会跳ALE61,否则正常情况面板看到会出现00000。 (2)DI法: 设定ABSE(0x1D)与ABSC(0x1F),当ABSE(ON),ABSC设定由OFF变为ON,系统将进行坐标初始化,完成后编码器脉波将从重设为0且PUU将重设为P6-01数值。 (3)PR回原点法: 若设定在PR控制模式时,可以执行PR回原点方式完成坐标初始化。 4.读取马达绝对位置: (1)设定P2-70决定马达绝对位置形式及读取方式设定, P2-70,bit0,DI/O读取单位设定,读取PUU(bit0=0)或Pulse(bit0=1) P2-70,bit1,通讯读取单位设定,读取PUU(bit1=0)或Pulse(bit1=1) (2)通讯读取马达位置单位为Pulse(P2-70=2,bit1=1,bit0=0): 设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误差清除为0),P0-51代表马达绝对位置圈数,P0-52代表马达绝对位置脉波数 (3)通讯读取马达位置单位为PUU(P2-70=0,bit1=0,bit0=0) 设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误差清除为0),P0-51=0,P0-52代表马达绝对位置PUU 5.透过上位控制器读取马达绝对位置信息P0-51及P0-52 6.(1)当编码器电源低于3.1V时会出现ALE61 (2)当绝对型系统初次上电尚未完成坐标初始化、编码器电源低于1.2V或在低电压状况下更换编码器电池,均会发生ALE60:马达绝对位置遗失。 (3)使用非绝对型编码器系统时,开启绝对型功能设定P2-69=1时,会发生ALE69:马达性是错误异常。 (4)编码器绝对位置Pulse型式圈数溢位时会发生ALE62;PUU形式溢位时会发生ALE289。
伺服故障报警及处理方法
伺服故障报警及处理方法 AL、10 电压过低电源电压太低。MR-E-□A:160V 以下 AL、12 存储器异常1 RAM存储器异常 AL、13 时钟异常印刷电路板的异常 AL、15 存储器异常2 EEP-ROM异常 AL、16 编码器异常1 编码器与伺服放大器之间通讯异常。 AL、17 电路板异常2 CPU·零部件异常 AL、19 存储器异 AL、1A 电机配合异常伺服放大器与伺服电机之间的配合有误。 AL、20 编码器异常2 编码器与伺服放大器之间通讯异常。 AL、24 主电路异常伺服放大器的伺服电机输出端(U·V·W相)接地故障。 AL、30 再生制动异常制动电流超过内置再生制动电阻或再生制动选件的允许值。再生制动晶体管异常 AL、31 超速转速超出了瞬时允许转速。 AL、32 过流伺服放大器的输出电流超过了允许电流。 AL、33 过压直流母线电压的输入在400V以上。 AL、35 指令脉冲频率异常输入的指令脉冲的脉冲频率太高。 AL、37 参数异常参数的设定值异常。 AL、45 主电路芯子过热主电路异常过热。 AL、46 伺服电机过热伺服电机的温度上升,热保护继电器动作。 AL、50 过载1 超过了伺服放大器的过载能力。负载率300%:2、5s以上负载率200%:100s 以上 AL、51 过载2 由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。伺服电机的锁定时间:1s以上 AL、52 误差过大偏差计数器的滞留脉冲超过编码器的分辨率×10[pulse]。 AL、8A 串行通讯超时 RS-232C通讯的时间超过参数No、56的设定值。 AL、8E 串行通讯异常伺服放大器与通讯设备(计算机等)之间出现串行通讯错误。CPU·部件异常 AL、E0 再生制动电流过大警告 可能会超出内置再生制动电阻或外部再生制动选件的制动 能力。 AL、E1 过载警告可能发生过载1,过载2报警。 AL、E6 伺服紧急停止警告 EMG-SG之间断开。 AL、E9 主电路OFF警告 主电路电源断开时,伺服开启信号(SON)为ON。 伺服报警代码及处理 AL、10 欠压 电源电压过低。MR-E-□A:160V 以下
松下伺服驱动器故障报警内容和处理方法
松下伺服驱动器故障报警内容和处理方法 代码:11 保护功能:控制电源欠电压 故障原因:控制电源逆变器上P、N间电压低于规定值。 1)交流电源电压太低。瞬时失电。 2)电源容量太小。电源接通瞬间的冲击电流导致电压跌落。 3)驱动器(内部电路)有缺陷。 应对措施:测量L1C、L2C和r、t之间电压。 1)提高电源电压。更换电源。 2)增大电源容量。 3)请换用新的驱动器。 代码:12 保护功能:过电压 故障原因:电源电压高过了允许输入电压的范围。逆变器上P、N间电压超过了规定值。电源电压太高。存在容性负载或UPS(不间断电源),使得线电压升高。 1)未接再生放电电阻。 2)外接的再生放电电阻不匹配,无法吸收再生能量。 3)驱动器(内部电路)有缺陷。 应对措施:测量L1、L2和L3之间的相电压。配备电压正确的电源。排除容性负载。 1)用电表测量驱动器上P、B间外接电阻阻值。如果读数是“∞”,说明电阻没有真正地接入。请换一个。 2)换用一个阻值和功率符合规定值的外接电阻。 3)请换用新的驱动器。 代码:13 保护功能:主电源欠电压 故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。 1)主电源电压太低。发生瞬时失电。 2)发生瞬时断电。 3)电源容量太小。电源接通瞬间的冲击电流导致电压跌落。 4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。 5)驱动器(内部电路)有缺陷。 应对措施:测量L1、L2、L3端子之间的相电压。 1)提高电源电压。换用新的电源。排除电磁继电器故障后再重新接通电源。 2)检查Pr6D设定值,纠正各相接线。 3)请参照“附件清单”,增大电源容量。 4)正确连接电源的各相(L1、L2、L3)线路。单相电源请只接L1、L3端子。 5)请换用新的驱动器。 代码:15 保护功能:电机和驱动器过热