技术与设计2第四章--控制与设计
第四章控制与设计
致同学们:
本章知识点是技术课程中最重要的考点之一,也是最难的,几乎每年的高考题都会考查到此章内容,所以同学们在学习本章知识的时候,要严格按照老师设定的目标、要求进行学习,老师所列举的例子要弄透彻,习题要弄明白,切不可疏忽大意。
一、控制的概念(理解):人们按照自己的意愿或目的,通过一定的手段,使事物向期望的目标发展,就形成了控制,这里所说的手段就是控制技术。现代控制技术通常是指自动控制技术。
二、典型控制系统系统分析(透彻理解其过程):
1.自动门(是开环控制系统,要熟悉):自动门的动作过程:当门口没有人时,门是关着的;当有人来到门口时,门打开;当人离开门口后一段时间,门又关闭。
自动门的功能:(1)无人时,常关;(2)有人时,开门。技术要求:(1)当人距门1m时,门即打开;(2)门打开后,延时10s后关门。系统组成:①门;②电动机;③控制器;④传感器。
工作过程:(1)当有人到达门前某一距离(如1m)时,传感器感知,并发出“有人”的信号;(2)控制器接到传感器传来的信号后,经变换放大后传给电动机
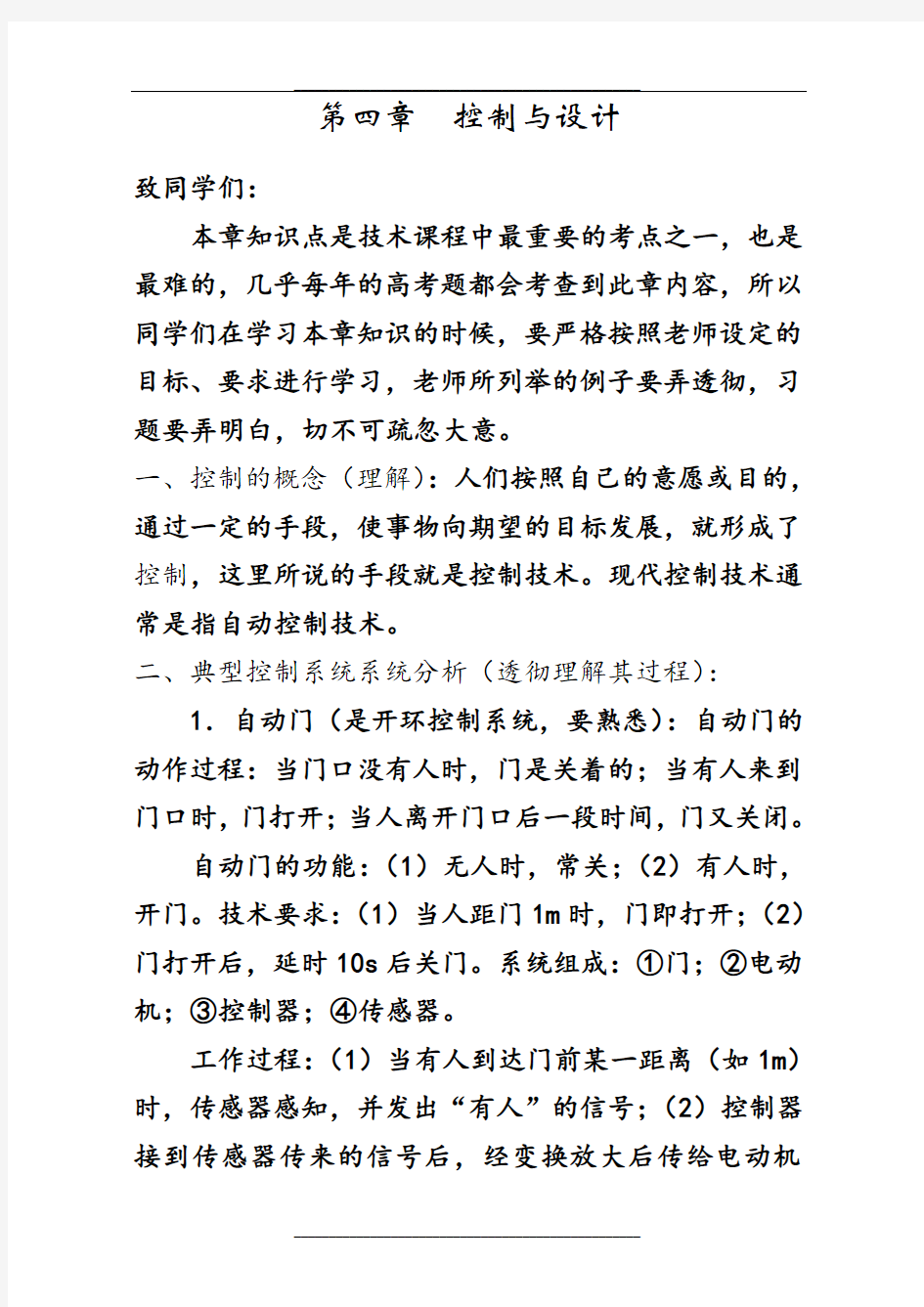
(这里的电动机叫做执行器,也称为驱动器);(3)电动机根据传来的开门信号转动,门被打开(这里的门叫做被近代对象,也称为控制对象,简称对象);(4)控制器保持开门信号延时(如10s )后,自动发出关门信号,电动机反转,门重新关闭。用图表示如下:
在上图中,从左往右看,当门口有人时,即有输入,传感器感知并形成信号。信号先后经过控制器、电动机的变换与传递直到把门打开,叫做有输出(门动作,打开)
。没有人,则无在这里,有人,就是有了一种信号。它作用于传感器,便是通过传感器给系统以输入。这种输入信号、输入作用,我们称为输入。系统在输入的作用下,被控对象(这里指自动门)对输入产生相应的响应。如有人时,门就被打开。门打开,就是输入信号、输出作用,简称输出。
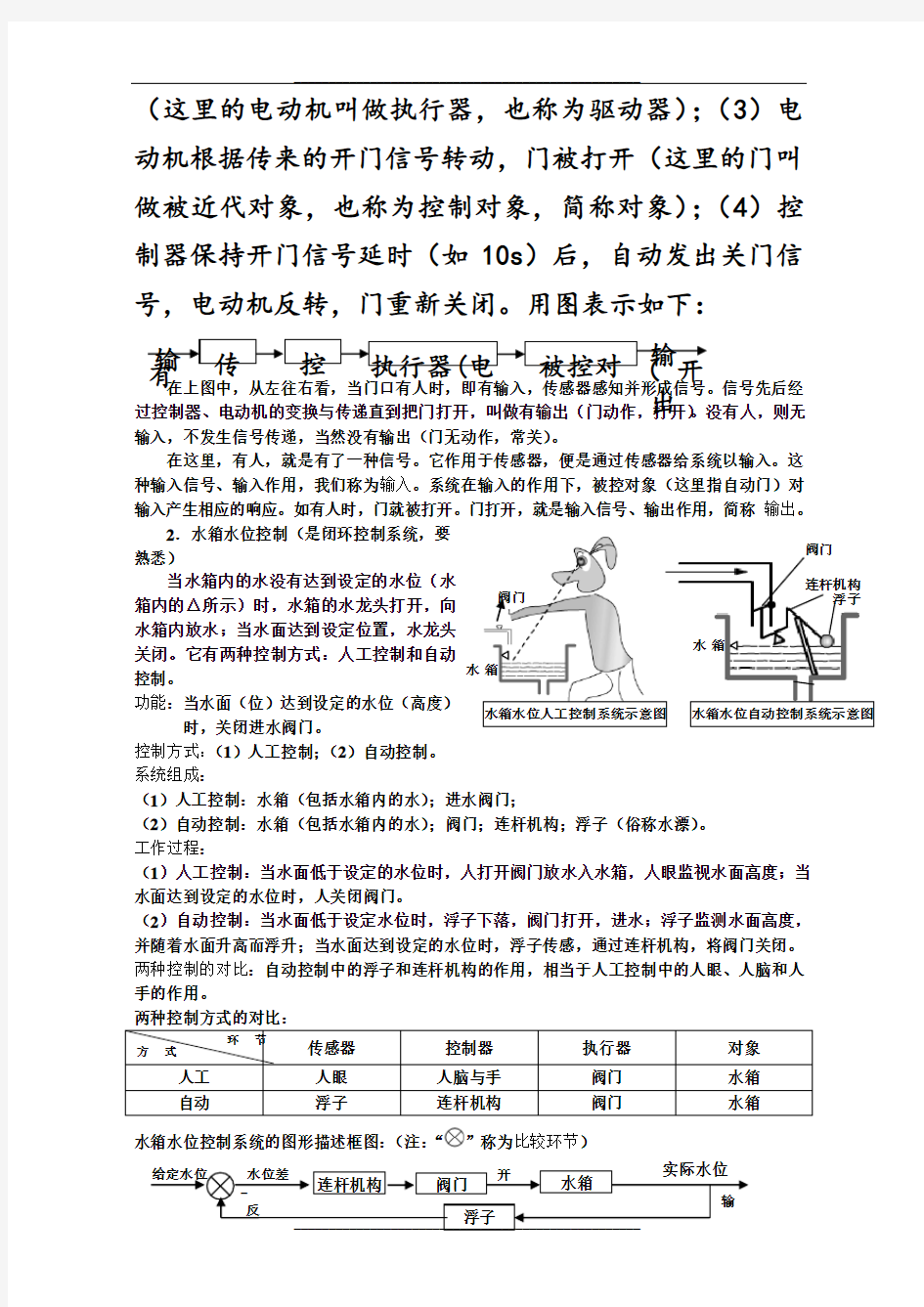
2.水箱水位控制(是闭环控制系统,要熟悉)
当水箱内的水没有达到设定的水位(水箱内的△所示)时,水箱的水龙头打开,向
水箱内放水;当水面达到设定位置,水龙头
关闭。它有两种控制方式:人工控制和自动
控制。
功能:当水面(位)达到设定的水位(高度) 时,关闭进水阀门。
控制方式:(1)人工控制;(2)自动控制。
系统组成:
(1)人工控制:水箱(包括水箱内的水);进水阀门;
(2)自动控制:水箱(包括水箱内的水);阀门;连杆机构;浮子(俗称水漂)。
工作过程:
(1)人工控制:当水面低于设定的水位时,人打开阀门放水入水箱,人眼监视水面高度;当水面达到设定的水位时,人关闭阀门。
(2)自动控制:当水面低于设定水位时,浮子下落,阀门打开,进水;浮子监测水面高度,并随着水面升高而浮升;当水面达到设定的水位时,浮子传感,通过连杆机构,将阀门关闭。 两种控制的对比:自动控制中的浮子和连杆机构的作用,相当于人工控制中的人眼、人脑和人手的作用。
两种控制方式的对比:
传感器
控制器 执行器 对象 人工 人眼
人脑与手 阀门 水箱 自动
浮子 连杆机构 阀门 水箱 水箱水位控制系统的图形描述框图:(注:“
”称为比较环节) 水箱水位人工控制系统示意图 水箱水位自动控制系统示意图 阀门 水箱阀门 水箱连杆机构 浮子 环 节 方 式 连杆机构 阀门 水箱 _ 水位差 实际水位
给定水位 开输输控执行器(电被控对输出 传(开有
输入
当水位差(给定水位与实际水位之差)不为零时,此信号经连杆机构使阀门打开,放水入水箱;同时,浮子将实际水位的信号反传给比较环节,从而形成水位差信号。当水位差为零时,阀门将关闭,不再进水。水位的高低,可以用水面高度这样的量来计量,因此,对于输入、输出就有了输入量、输出量的叫法。这里,实际水位为被控量,即输出量,阀门开度为控制量。
三、开环控制系统与闭环控制系统的区别(透彻理解并掌握)。
现在,我们来比较上述两个框图,第一个框图,即自动门,信息总是自输入端单向传至输出端,不存在信息逆向流动;控制器通常具有功率放大的功能。
而第二个框图则不然,除上述过程外,还要将输出信息反传给输入端(比较环节),存在信息逆向流动。这就是说,第二个框图相比第一个框图来说,就多了一个信息传递过程。水位自动控制系统中,信息流经一个闭合环路,这类系统称之为闭环控制系统。闭环控制系统中,将输出信息反传给比较环节的做法,称之为反馈。而自动门系统中,没有反馈,也就不存在闭环,这类系统称之为开环控制系统。
同开环控制系统相比,闭环控制具有一系列优点。在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,相比开环控制系统而言,它具有较强抑制干扰
....的能力。
开环控制系统概念(理解):指输出量不对系统的控制产生任何影响的控制系统。
闭环控制系统概念(理解):系统的输出量对系统的控制作用有直接影响的控制系统。
开环控制系统与闭环控制系统的区别总结(此总结非常重要,要非常透彻的掌握)
1.闭环控制系统与开环控制系统的表现为有反馈和无反馈
........................,如果有反馈环节,一般都是
传感器充当反馈环节,就是闭环,否则就是开环。之所以闭环控制系统会调整,是因
为带反馈比较环节。
2.闭环控制系统有比较环节,就是输出量与输入量的比较。开环控制系统就没有比较环节。
3.闭环控制系统的输出(量)会对系统的整个控制过程造成影响,但开环控制系统输出量不会对系统的控制造成影响。
4.开环控制系统的结构和原理比较简单,信息从输入端传到输出端,仅有一条路径。它的最大缺点是控制精度不高。闭环控制系统的结构较为复杂,信息流经的路径有两条,一条自输入端传至输出端,另一条是输出端信息反传到输入端的比较环节。它可以有较高控制精度和有较强的抗干扰性能。
5.开环控制系统的输出量不会自动调整,但一般而言(除了有人参与的人工控制系统而言),闭环控制系统的输出量会自动调整。
四、控制的要素(了解一下就行):控制目的、控制手段、控制对象。
五、控制的分类:
①从人工干预情形分:人工控制和自动控制(挺简单,但挺重要)
②按照执行部件的不同分:机械控制、气动控制、液压控制、电子控制等。(这个了解一下)
六、控制系统的组成(熟练掌握):被控对象和控制装置。其中,控制装置包括传感器、控制器、执行器。
控制系统通常分类开环控制系统和闭环控制系统。
开环控制系统是指输出量不对系统的控制产生任何影响的控制系统;
闭环控制系统是指在系统的输入端与输入端之间存在反馈回路,输出量对控制过程产生影
响的控制系统。 八、闭环控制系统的工作过程(熟练掌握):对于闭环控制系统来说,输入信号和反馈环节传回来的反馈信号相比较,产生偏差信号→控制器根据偏差信号的大小和极性(正或负),产生控制作用,传给执行器→执行器将此信号放大、变换后,传到被控对象上→被控对象受执行器传来的信号(称为控制信号)的驱动,产生输出信号;同时,反馈环节又将感知到的被控对象的输出信号,经变换后产生反馈信号。
:
输入→传感器→控制器→执行器→被控对象→输出
或者是:输入量→控制器→执行器→被控对象→输出量
①按下面的顺序确定系统各个环节:a ——被控对象,b ——执行器,c ——控制器,d ——反馈环节(对闭环控制系统而言,以下同)
②确定被控量(输出量)、控制量、输入量、反馈量和偏差量。
③用带箭头的直线表示信息在系统中流动、传递的方向与过程。
④加上比较环节,闭环。 绘制技巧:人们看框图时,习惯于自左向右看。但是绘制框图时,不一定要采取自左往右画的方法,而采用上述四个步骤的“绘制框图的方法”。即自右往左画:先画被控对象,再画执行器,接着画控制器、反馈环节,最后画,连线闭环,并标注各量。
1.通道及其作用:框图中,信息流经的路径叫做通道。对于闭环控制系统来说,有两类基本通道,那就是前向通道和反馈通道。
2.环节及其作用:传感器,也称敏感器。在自动门系统中,传感器的输入是“有人到门口”的非电信号。传感器将此信号转换为“有人”的电信号,并传送给下一个环节——控制器。因此,传感器实质上是一个监测元件。在水位自动控制系统中,浮子起着传感器作用,它作为一个环节,时刻监测着“实际水位”(对系统来说,是输出量或被控量;而对浮子环节来说,是输入量),形成反馈信号,传送给系统输入端。控制器,在开环控制系统中根据传感器直接传送过来的信号,而在闭环系统中根据比较环节传送过来的信号,产生控制器输出信号并传送给焉个环节。在自动门控制系统中,传感器传送出来的电压信号很弱,而执行器(即电动机)需要的激励输入却是较大的电流信号。因此,这里的控制器,不仅要产生控制作用(如开门与否)信号,而且还要起到信号的变换与放大作用。执行器,是控制器输出信号的执行机构,也称执行元件。电动机,就是常用的执行器之一。它根据控制器的输出信号产生旋转运动,从而驱动控制对象作相应运动。从这个意义上说,执行器还称为驱动器。需要特别注意的是比较环节,它根据输入量与反馈量的大小与极性,产生偏差,再传给控制器。
十二、控制系统的干扰(要理解)
真正的控制系统在运行的过程中还会受很多因素的影响。例:雨天交通、病毒攻击人体、阵风干扰飞机和外界温度对体温的影响、冰箱外界温度对冰箱的影响等。
干扰就是对控制系统的行为造成影响的有害的信号及扰动,即除给定量外,引起被控量量
值变化的各种因素。
十三、典型控制系统系统案例分析(要分析透彻)
人体温度控制系统分析(此系统是一个闭环控制系统)
功能:维持人体体温在正常范围内,如37℃左右。系统组成:人体;有关的系统;大脑中
控制器 执行器
被控对象 反馈环节 _ 偏差量 输出量 输入量
枢。
工作过程:(1)皮肤感知环境温度,并将此信息通过神经系统传给大脑中枢;(2)大脑中枢经判断,给人体(被控对象)的有关的系统(如心血管系统等)发出工作指令(如多或少输送热量)(3)有关的系统(执行器)根据指令,加速供给热量或相反,紧闭汗毛孔或出汗;(4)反复上述过程,人体体温得以维持在一个正常的范围内。夏季酷热、冬季严寒。然而,人体的正常体温总保持在37℃左右。为什么能做到这样呢?原来人体拥有一个高级的体温控制(调节)系统。很显然,外界环境温度的变化对人体体温控制系统的运行,会带来影响。这种外界温度的变化叫做干扰因素,这类影响叫做干扰作用。环境温度的变化是人体体温控制系统的一种主要干扰因素。
人体温度控制系统框图如下图所示:
飞机俯仰姿态控制系统分析这个案例不再列举了,同学们可以看一下课本。
十四、常见的控制系统。
1.开环控制系统。有自动门、声控灯、光控灯、音乐喷泉。
2.闭环控制系统。有饮水机温度控制系统、空调、电冰箱、太阳能自动上水阀。
看,闭环控制系统基本上都是对“量”、“度(包括温度、湿度、速度)进行精确控制。会自动调整。
1.从手摇动扇到电风扇再到空调器的发展过程来看,体现了()
A.从机械控制到电子控制的过程B.从手动到手动控制再到自动控制的过程
C.从手动到电动控制的过程D.从自动到手动控制的过程
2.在控制系统中,将控制器的信号转换成能影响被控对象的的信号的装置,称为()A.传感器B.控制器C.执行器D.驱动器
3.在人体温度控制系统中,皮肤相当于()
A.控制器B.传感器C.执行器D.驱动器
4.在声控灯系统中,输出信号是()
A.通过电灯的电流B.电路中的导线和电灯泡
C.供电电网的电压或频率D.楼道里声音的大小
提示:B.电路中的导线和电灯泡是被控对象;D.楼道里声音的大小是输入信号A.通过电灯的电流是系统的输出信号,而电流的状态有两种:即有电流和无电流。
5.下图是房间温度控制系统的方框图,请回答下列问题:
本控制系统中的被控量(输出量)和输入量分别是和。6.射击比赛中射手通过瞄准目标、使子弹射中靶心,分析这一过程,我们理解一个控制现象应从()入手。
设定温度
控制装置制冷装置空调房间
房内实际温
空调器测温装置
大脑中枢循环系统人体(包括皮肤)
_ 温度差
实际体温正常体温
反
A.对象B.目的C.手段D.对象、目的、手段
提示:可以理解为完成一项控制要具备的三个要素:控制目的、控制手段、控制对象,所以理解控制现象要从目的、手段、对象入手。
7.楼道内的声光控灯属于自动控制系统,此系统应属于()
A.开环控制B.闭环控制
C.声控是开环控制光控是闭环控制D.以上说法均不对
8.随着音乐起伏而变化的音乐喷泉是控制技术的一种具体应用。其工作过程中由“声—电转换装置”将起伏的音乐声音强度转换为随之变化的电信号,并将该信号放大,这种放大的电信号驱动电动机带动水泵转动,音乐声音信号强,水泵的转速就快,喷头的压力就大,喷出的水柱就高,反之,喷出的水柱就低。音乐信号的强弱与喷泉水柱的高低一一对应。请回答下列问题:
(1)音乐喷泉控制系统属于控制(开环或闭环)系统。
(2)该控制系统的输入信号和输出信号分别是和。(3)从控制系统组成的角度,分析“声—电转换装置”在此控制系统中起到哪两个环节的作用。
9.在电冰箱的温度控制中不属于干扰因素的是()
A.打开冰箱门B.把食物放入冰箱内C.电压降低2伏D.房间温度变化大
提示:“电压”是冰箱中电源控制系统的输入量,电源控制系统只能起到把输入的电压给稳定到一个恒定值,而温度控制系统和电源控制系统不属于一个系统,温度控制系统的输入量是温度,在这里影响温度的因素是ABC三项,所以电压不是温度控制系统的干扰因素。10.为了方便和省电,楼梯过道上的灯都安上声光控开关,声控开关和光控开关的联接方式为
11.下列各项中,属于开环控制系统的是( )
A.家用电风扇的转速调节系统B.电冰箱温度控制系统
C.汽车方向控制系统D.抽水马桶水位的控制系统
12.在空调器的温度控制系统中,下列不属于影响其温度控制的干扰因素的是()A.打开门窗B.空调器所在的房间温度由20 ℃变到32 ℃
C.市电压不稳定D.房间内人数增加
13.[2009年高考山东卷]成语和俗语是千百年来人们生活智慧的结晶,其中不少蕴含着有关技术与设计‘的道理。下列与设计过程中的“结构”、“流程”、“系统”和“控制”集资对应的是()
①见风使舵②铜墙铁壁③磨刀不误砍柴工④牵一发而动全身
A.②③①④B.②③④①C.③②①④A.③②④①
14.判断题
(1)在温室大棚系统中,室温和供暖设备是系统的被控量。(×)
(2)声控灯是一个简单的闭环控制系统(×)
(3)开环控制与闭环控制的根本区别是闭环控制应用反馈作用来减小系统的误差(√)(4)被除数控量和控制量的确定是控制方案的关键(√)
(5)控制量应选择可控制的,对掏干扰因素和保持系统稳定无明显作用的量(×)
(6)抽水马桶的水箱放入两个空啤酒瓶可以起节约用水的作用(√)
15.画出开环控制系统的方框图
16.画出闭环控制系统框图。
17.如图是一个蒸汽加热的热水槽,冷水流入到水槽内,通过槽内蛇形盘管进行加热,加热后的热水流出热水槽。如果冷水流量加大,水槽内的温度下降,蒸汽阀开大,加大蒸汽的流量,冷水流量变小,加热槽水温上升,蒸汽阀门关小,蒸汽量变小,控制加热槽内的温度稳定。
(1)蒸汽加热水槽控制系统属于(选填“开环”或“闭环”)控制系统。
(2)请补充完整蒸汽加热水槽自动控制系统方框图。
18.下列控制系统中,属于开环控制系统的是()。
A.电冰箱的温度控制B.计算机的CPU上的风扇的转速控制
C.现代化农业温室的温度控制D.红绿灯定时控制系统
19.理解一个控制现象,要明确控制的对象是什么,控制要达到什么目的和采取什么控制手段。例如,导弹控制系统控制的是导弹与目标之间的距离,目的是要击中目标(距离为零),分析这个控制系统,其控制的对象是:()
A.人 B.目标 C.计算机 D.导弹
20.分析下列控制现象是自动控制还是人工控制
(1)摇动辘轳,提取井水()
(2)用气筒给自行车的轮胎充气()
(3)电梯的上下运行控制()
(4)家用灌溉抽水机抽水的控制()
21.分析题
(1)如果将我们的身体看成是一个控制系统,在你从书架上取出一本想要的书的过程中,身体各部分分别完成的是什么功能?
①命令的发出者是:
②命令的执行者是:
③命令的作用对象是:
④反馈环节是:
给定量
控制器②执行器③被控对象④
被控量⑤
水温探测仪
①
GPS控制网技术设计方案
GPS控制网技术设 计方案 1
辽宁科技大学 课程设计说明书 设计题目: 鞍山市及周边E级 GPS控制网技术设计书 学院、系: 资源与土木工程学院 专业班级: 测绘工程 -2 学生姓名: 张贺 指导教师: 宁殿民杨凤芸 成绩: 12 月 31 日 - 1 -
目录 一、作业目的及任务..............................................错误!未定义书签。 二、测区概况 ..........................................................错误!未定义书签。 三、测量依据、原则..............................................错误!未定义书签。 四、技术指标 ..........................................................错误!未定义书签。 五、技术设计内容步骤..........................................错误!未定义书签。 六、高程控制的布设..............................................错误!未定义书签。 七、1:500测区地形图测绘....................................错误!未定义书签。 八、工作进程、时间安排......................................错误!未定义书签。 九、检查验收 ..........................................................错误!未定义书签。 十、上交资料 ..........................................................错误!未定义书签。十一、经费预算...................................................错误!未定义书签。 - 2 -
D级GPS控制测量技术设计书要点
目录 一、课程设计的目的和任务 (3) 1.1.设计目的 (3) 1.2.任务概述 (3) 二、测区概况 (3) 2.1.测区自然地理概况 (3) 2.2民族种类 (3) 2.3已有资料情况 (3) 2.4测区的范围: (3) 三、设计的依据 (3) 四、主要的技术指标 (4) 4.1GPS测量 (4) 4.2水平角观测 (6) 4.2.1水平距离的观测 (6) 4.2.2导线网 (6) 五、坐标系统的选择 (7) 六、设计方案 (7) 6.1布网的原则 (7) 6.1.1.GPS网型网型方案设计 6.2.图上展绘已知点(或图上查找已知点) (7) 6.3按点位要求与测区情况在图上选点布网 (8) 6.4.判断和检查点间的通视(主要点间) (9) 6.5.外业选点埋石 (10) 6.5.1选点 (10) 6.5.2标志埋设 (10) 六、仪器设备的选择 (11) 七、外野实测方案设计 (11) 7.1. GPS外业工作的原则 (11) 7.2安置天线要求 (12) 7.2.1对仪器设备的要求 (12) 7.3观测方法 (13) 7.3.1 GPS 观测方法 (13) 7.4 地籍勘丈 (13) 7.4.1 、地籍勘丈的方法: (13) 7.4.2. 宗地图编号 (13) 7.4.3. 地籍图的规格及分幅 (13) 7.4.4 地籍勘丈的基本精度 (14) 7.4.5界址点的施测方法 (14) 7.4.6 界址点边长的检核: (14)
7.4.7 地籍图的表示原则: (15) 7.4.8 宗地图 (15) 7.4.9面积量算与汇总统计 (15) 7.4.10提交成果 (15) 7.5数据的记录 (15) 八、数据处理的方法与要求 (17) 8.1.外业观测数据处理 (17) 8.2外业观测数据质量检核 (17) 8.3数据处理和平差计算 (18) 8.3.1数据处理 (18) 8.3.1无约束平差 (19) 8.3.2约束平差 (19) 8.4 GPS 高程拟合 (19) 七、提交成果 (19) 八、参考文献 (20)
平面控制网的布设形式
场地平整就是将天然地面改造成工程上所要求的设计平面,由于场地平整时全场地兼有挖和填,而挖和填的体形常常不规则,所以一般采用方格网方法分块计算解决,平整场地前应先做好各项准备工作,如清除场地内所有地上、地下障碍物;排除地面积水;铺筑临时道路等 平面控制网的布设形式,应根据建筑总平面图、建筑场地的大小和地形、施工方案等因素来确定。 对于地形起伏较大的山区或丘陵地区,常用三角网或三边网; 对于地形平坦而通视较困难的地区或建筑物布置不很规则时,可采用导线网; 对于地势平坦的、建筑物众多且布置比较规则和密集的工业场地或住宅小区,一般采用建筑方格网; 对于地面平坦的小型施工场地,常布置一条或几条建筑基线,组成简单的图形。 平面控制网,应根据等级控制点进行定位、定向和起算,其等级和精度应符合下列规定: ①建筑场地面积大于或重要工业区,宜建立相当于一级导线精度的平面控制网; ②建筑场地小于或一般性建筑区,可根据需要建立相当于二、三级导线精度的平面控制网; ③当原有控制网作为场区控制网时,应进行复测检查。 高程控制网应布设成闭合水准路线、附合水准路线或结点水准网形。高程测量的精度,一般不宜低于三等水准测量的精度要求。 8.2建筑基线 8.2.1 建筑基线的布设方法 在面积不大、地势较平坦的建筑场地上,根据建筑物的分布、场地地形等因素,布设一条或几条轴线,以作为施工控制测量的基准线,简称建筑基线。 建筑基线的布设形式有三点“一”字形、三点“L”字形,四点“T”字形及五点“十”字形等形式。布设时要求做到: 建筑基线应平行或垂直于主要建筑物的轴线,以便用直角坐标法进行测设; 建筑基线相邻点间应互相通视,且点位不受施工影响; 为了能长期保存,各点位要埋设永久性的混凝土桩; 基线点应不少于三个,以便检测建筑基线点有无变动。 8.2.2 建筑基线的测设方法 根据建筑红线测设 在城市建设区,建筑用地的边界线(建筑红线)是由城市规划部门选定并由测绘部门现场测设的,可作为建筑基线放样的依据。 一般情况下,建筑基线与建筑红线平行或垂直,故可根据建筑红线用平行线推移法测设建筑基线。 如图,AB、AC是建筑红线,从A点沿AB方向量取d2定Ⅰ′点,沿AC方向量取d1定Ⅰ″点。 2.根据建筑控制点测设 对于新建筑区,在建筑场地上没有建筑红线作为依据时,可根据建筑基线点的设计坐标和附近已有控制点的关系,按前所述测设方法算出放样数据,然后放样。 如图所示,Ⅰ、Ⅱ、Ⅲ为设计选定的建筑基线点,A、B为其附近的已知控制点。首先根据已知控制点和待测设基线点的坐标关系反算出测设数据,然后用极坐标法测设Ⅰ、Ⅱ、Ⅲ点。由于存在测量误差,测设的基线点往往不在同一直线上,因而,精确地检测出∠Ⅰ′Ⅱ′Ⅲ′。若此角值与180o之差超过限差±10″,则应对点位进行调整。调整值δ按下列公式计算: 3建筑方格网 在建筑物比较密集或大型、高层建筑的施工场地上,由正方形或矩形格网组成的施工控制网,
控制测量技术设计书
控制测量技术设计书 1.工程名称及任务。 2.测区概况简述。 3.已有资料的来源及分析、利用论证。 4.坐标系统的选择及处理方法的论证,起始数据的配置和处理。 5.水平控制网布设方案阐述,其中包括: (1)首级网的等级和布网方式,以及本次控制网在精度和密度方面对日后布设加密网的保证。 (2)控制网(点)精度估算的简要过程及结果。 (3)从经济上、技术上、精度上对两个以上布网方案进行对比论证,从中确定一个最优方案。 (4)填写精度统计表。 6.技术依据及作业方法。内容主要包括: (1)工程执行的规范及施测细则。 (2)觇标及标石图并注明规格,材料及埋设方法(绘出示意图)。 (3)仪器的选择及检验项目要求。 (4)观测方法及各项限差(参阅规范或教材,不能杜撰)。 (5)概算内容和平差方法。 7.工作量综合计算及工作进程计划表(自行估计)。 8.需用的主要仪器设备(包括名称、型号和标称精度)、材料及经费预算。 9.工程项目完成后应提交的资料清单。
目录 一.测区情况 1.1测区位置及面积 1.2地理状况 二.作业依据 三.测区已有资料及利用 3.1平面控制资料 3.2高程控制资料 3.3其他资料 四.平面控制测量 4.1E级GPS测量 4.2三级导线测量 五.高程控制测量 5.1四等水准测量 5.2光电测距三角高程测量 六.一级导线、水准测量和光电测距三角高程测量平差计算6.1观测数据的检查 6.2平差计算 七.提交成果资料 7.1技术总结 7.2控制点成果表的制作 7.3控制网图的制作要求
八.图根控制测量 8.1图根导线 8.2图根高程测量 8.3平差计算 8.4提交资料 九.附图、附表、附件 本次实习的目的是了解控制测量作业的全过程,通过对长沙县水渡河及其周边地区实现控制测量,巩固课堂学习的理论知识,将理论及实践有机结合,提高理论水平及外业操作能力。 一.测区情况 1.1测区位置及面积 东经113°,北纬28°向涉及周围13km左右。 施测范围呈不规则形状,范围面积约14km2。 1.2地理状况 测区位于长沙县水渡河区,交通便利。东至水渡河大桥、筒灰村、望新村、孙家坡、长沙人民政府一线,南到开元路、国防科大,西沿洪山路一线,北止水渡河。 测区为经济开发区,农田。构成了以经济开发去为主的城市建筑物,以星沙大道、开元路、洪山路、潇湘西路、湘龙路及附属街坊的建筑区,西北边的成片 农田,该区地势平坦,便于开展成片测绘作业,测区东南部建筑密度较大,对于开展成片测绘作业有一定的影响。
高中通用技术《控制与设计》教案
高中通用技术《控制与设计》教案 高中通用技术《控制与设计》教案 第一节:什么是控制 / 第二节:控制系统的基本组成与工作过程 教学目标: 知识目标: 1、理解控制的概念及在现在生活中的应用 】 2、分析典型案例,熟悉简单的开环控制系统的基本组成和简单的工作过程 3、熟悉闭环控制系统的基本组成,能画出一个简单的闭环控制系统的方框图
4、理解控制系统的基本组成 过程与方法: [ 理解控制系统的基本组成和简单的工作过程 情感态度与价值观: < 充分利用技术的作用,解决生活与学习中的问题 复习重点:理解控制系统的基本组成和简单的工作过程复习难点:理解控制系统的基本组成和简单的工作过程 — 教学策略
教法: 本的教学结合具体的教学内容和目标我们采用“案例情景—机理分析—总结归纳-认识提升”的模式展开。在教学中把知识点的教与学置于具体的案例情景当中,通过丰富而贴近生活的案例使学生从生活体验到理性分析的思维升华过程。同时关注学生能否用不同的语言表达、交流自己的体验和想法。通过富有吸引力的现实生活中的问题,使学生回想和体会控制系统的工作过程,激发学生的好奇心和主动学习的欲望。让学生本着“回想—分析—联想—猜想”的思维过程,对教学内容进行步步展开,使学生亲历自主探索和思维升华的过程。 学法: 鼓励学生自主探究和合作交流,引导学生自主观察、总结,在与他人的交流中丰富自己的思维方式,获得不同的体验和不同的发展。注意引导学生体会控制系统的工作过程和方式,特别是理解闭环控制的工作过程以及其构成的作用。 教学过程 ) 引入:知识铺垫:通过系统与设计过度到 第四单元:控制与设计
城市D级GPS控制网设计书
一、任务概述 由于城市改造,阜新市原有控制点被破坏,为了保障测绘的日常使用,需要重新建立城市控制网。城市首级平面控制拟布设D 级GPS 控制网,首级高程控制拟布设二等水准网。 二、测区状况 阜新,位于辽宁省西部的低山丘陵区,是辽宁省西北部地区的中心城市 ,为沈阳经济区重要城市之一。内蒙古高原和东北辽河平原的中间过渡带,全区呈现长矩形,中轴斜交于北纬42°10′和东经122°00′的交点上。 东西长170千米,南北宽84千米,总面积10445平方千米。地势西北高,东南低;西南高,东北低。辖海州区、细河区、太平区、新邱区、清河门区五个市辖区,彰武县和阜新蒙古族自治县,截止到2015年阜新市人口为177.8万。 阜新市初步探明有38种矿藏,矿产地228处。其中煤的储量较大,资源储量达10亿多吨。石灰石、珍珠岩、膨润土、花岗岩的储量也十分丰富,萤石、硅砂、沸石的储量居辽宁之首,黄金储量尤其可观。 三、级别和精度要求 D 级GPS 网相邻点基线长度精度用下列公式表示,并按下表规定执行。 δ=22)*(d b a 式中:δ—GPS 基线向量的弦长中误差(mm ),亦即等效距离误差。 a —GPS 接收机标称精度中的固定误差(mm )。 b —GPS 接收机标称精度中的比例误差系数(ppm )。 d —GPS 网中相邻点间的距离(km )。 四、布设原则 1.GPS 网一般应采用独立观测边构成闭合图形,如三角形、多边形或附合线路,以增加检核条件,提高网的可靠性。 2.GPS 网作为测量控制网,其相邻点间基线向量的精度,应分布均匀。 3.GPS 网点应尽量与原有地面控制点相结合。重合点一般不少于3个(不足时应联测),且在网中分布均匀,以可靠地确定GPS 网与地面之间的转换参数。 4.GPS 网点应考虑与水准点重合,而非重合点,一般应根据要求以水准测量(或相当精度的测量方法)进行联测,或在网中布设一定密度的水准联测点。 5.为了便于GPS 的测量观测和水准联测,减少多路径影响,GPS 网点一般应设在视野开阔和交通便利的地方。 6.为了便于用经典方法联测或扩展,可在GPS 网点附近布设一通视良好的方位点以建立联测方向,方向点与观测站距离一般应大于300米。 五、埋石、仪器、选点 1.埋石
控制测量技术设计书45450
某县城第二次土地调查(城镇部分) 控制测量技术设计书 项目编号 批准单位:申报单位 审批意见:总工程师: 编写人: 审批人: 日期:
目录 1 任务概况 (3) 2 测区概况 (4) 3已有资料分析与利用 (4) 4 作业依据 (5) 5 作业的主要仪器设备 (5) 6 控制测量 (6) 7 ……………………………………………………..错误!未定义书签。
某县第二次土地调查(城镇部分) 控制测量技术设计书 1 任务概况 第二次土地调查是一项重大的国情国力调查。开展第二次土地调查,全面查清我国土地利用现状主,是贯彻落实科学发展观,加强和改善土地调控、严格土地“闸门”需要;是严格保护耕地特别是基本农田,保障国家粮食安全,实现国家长治久安的需要;是充分挖掘土地利用潜力,大力推进节约集约用地,推动建设资源节约型社会的需要,是加强各级政府执政能力建设、提高国土资源管理水平的需要。城镇地籍调查是第二次全国土地调查的重要部分,是城市发展、规划、管理的基础,是国土资源管理的重要手段。 受某县国土资源局委托,曲靖地源勘测科技有限责任公司承担了某县某县城第二次土地调查(城镇部分)的任务,该任务具体工作内容如下: 1. 某县城四等GPS平面控制网,同步建立GPS拟合高程控制网,控制面积16.7平方公里; 2. 图根控制测量; 3.对测区16.7平方公里进行权属调查 4. 1:500标准分幅地籍图测绘; 5.宗地图编绘; 6. 面积量算,统计汇总; 7. 地籍数据库建设; 8. 有关技术设计,工作报告,技术报告,数据库建设报告编写 项目工期要求:全部工作在6月30日前完成。
D级GPS控制网设计书
北京建筑大学西城校区D级GPS控制网技术设计书 班级: 姓名: 学号:
一、任务概述 由于校园改造,校园实习场原有控制点被破坏,为了保障测绘实践教学,需要重新建立校园控制网。校园首级平面控制拟布设D 级GPS 控制网,首级高程控制拟布设二等水准网。 二、测区状况 测区位于北京市西城区展览馆路1号,占地12.3公顷,总建筑面积为20.2万平方米。校区经过长期建设,故行道树高大,像篮球场北侧道路。高大的树木在很大程度上给GPS 测量工作带来了不便。 校园周边现有北京市C 级GPS 控制点4个,分别为:西直门桥、紫竹桥西、公主坟、复兴门桥。 三、级别和精度要求 δ=22)*(d b a 式中:δ—GPS 基线向量的弦长中误差(mm ),亦即等效距离误差。 a —GPS 接收机标称精度中的固定误差(mm )。 b —GPS 接收机标称精度中的比例误差系数(ppm )。 d —GPS 网中相邻点间的距离(km )。 四、布设原则 1.GPS 网一般应采用独立观测边构成闭合图形,如三角形、多边形或附合线路,以增加检核条件,提高网的可靠性。 2.GPS 网作为测量控制网,其相邻点间基线向量的精度,应分布均匀。 3.GPS 网点应尽量与原有地面控制点相结合。重合点一般不少于3个(不足时应联测),且在网中分布均匀,以可靠地确定GPS 网与地面之间的转换参数。 4.GPS 网点应考虑与水准点重合,而非重合点,一般应根据要求以水准测量(或相当精度的测量方法)进行联测,或在网中布设一定密度的水准联测点。 5.为了便于GPS 的测量观测和水准联测,减少多路径影响,GPS 网点一般应设在视野开阔和交通便利的地方。
通用技术控制与设计方案_通用技术控制与设计
通用技术控制与设计方案_通用技术控制与 设计 【教学设计】 通用技术控制与设计 下面是小编整理的通用技术控制与设计,供大家参考! 复习内容: 第一节:什么是控制 第二节:控制系统的基本组成与工作过程 教学目标: 知识目标:
1、理解控制的概念及在现在生活中的应用 2、分析典型案例,熟悉简单的开环控制系统的基本组成和简单的工作过程 3 、熟悉闭环控制系统的基本组成,能画出一个简单的闭环控制系统的方框图 4 、理解控制系统的基本组成 过程与方法: 理解控制系统的基本组成和简单的工作过程 情感态度与价值观: 充分利用技术的作用,解决生活与学习中的问题 复习重点:理解控制系统的基本组成和简单的工作过程 复习难点:理解控制系统的基本组成和简单的工作过程
教法: 本章的教学结合具体的教学内容和目标我们采用”案例情景--机理分析--总结归纳-认识提升”的模式展开。在教学中把知识点的教与学置于具体的案例情景当中,通过丰富而贴近生活的案例使学生从生活体验到理性分析的思维升华过程。同时关注学生能否用不同的语言表达、交流自己的体验和想法。通过富有吸引力的现实生活中的问题,使学生回想和体会控制系统的工作过程,激发学生的好奇心和主动学习的欲望。让学生本着”回想--分析--联想--猜想”的思维过程,对教学内容进行步步展开,使学生亲历自主探索和思维升华的过程。 学法: 鼓励学生自主探究和合作交流,引导学生自主观察、总结,在与他人的交流中丰富自己的思维方式,获得不同的体验和不同的发展。注意引导学生体会控制系统的工作过程和方式,特别是理解闭环控制的工作过程以及其构成的作用。
引入:知识铺垫:通过系统与设计过度到 第四单元:控制与设计 第一节什么是控制 1、控制的概念: 2、控制的应用: 第二节:控制系统的基本组成与工作过程 1、控制系统: 【案例分析】 自行车速度的控制的实现过程、电风扇风速的控制过程、自动门的控制过程、遥控电视频道更换的控制过程、航空模型的控制过程
建立平面控制网及高程控制网
建立平面控制网及高程控制网 所谓控制网是由一定等级(满足一定精度要求)地控制点所组成地相邻点互相通视并构成一定图形地测量网.平面控制网是建筑物定位地基本依据,要分清场区平面控制网还是建筑物平面控制网,根据整体控制局部、高精度控制低精度地原则,以场区平面控制网控制建筑物平面控制网. 3.3.1大面积地建筑小区、大型建筑物或创市优重点工程,必须测设场区平面控制网,作为场区地整体控制,它是建筑物平面控制地上一级控制,应结合建筑物平面布置地图形特点来确定这种控制网地图形,可布置成十字形、田字形、建筑方格网或多边形. 建筑方格网应在场区平展完成后在总平面图上进行设计,其设计原则如下. (1)方格网地主轴线应尽可能选择在场区地中心线上(宜设在主要建筑物地中心轴线上).其纵横轴线地端点应尽量延伸至场地边缘,既便于方格网地扩展又能确保精度平均. (2)方格网地顶点应布置在通视优良又能长期保存地地点. (3)方格网地边长合宜太长,大凡小于100 m,为便于计算和记忆,宜取10 m地倍数.(4)轴线控制桩应尽量投测在方格网边上. (5)方格网全部施测完成后,采用将所有建筑物一次性定位地方法来检验其准确性,对于未进行平差地方格网是一种较好地检验方法. 建筑方格网地测设方法是先测设主轴线,后加密方格网,并按导线测量进行平差. 3.3.2建筑物平面控制网是建筑物定位和施工放线地基本依据,它是场区内地二级平面控制.建筑物平面控制网地图形,可以是一字形基线(两个控制点组成地)、十字形控制网或平行于建筑物外廓轴线地其他图形(图1). 3.3.3高程控制网是建筑场区内地上、地下建(构)筑物高程测设和传递地基本依据.高程控制网布点地密度应恰当,大凡每幢楼房应设置1~2个点,主要建
苏教片高中通用技术技术与设计1全套教案(最完整版)
高一通用技术技术与设计1 全 册 教 案
第一章:走进技术世界 一、技术的价值 (一)教材分析“技术的”是苏教版通用技术教材必修1的第一章《走进技术世界》的第一节内容,.知识与技能 ⑴理解技术人类需求技术的。使学生感受技术采用师生互动探究式教学方法。直观图片、详实资料 教学过程(第一课时)教学环节教师引领学生活动设计意图通用技术课程介绍 1.何为是通用技术课程? 通用技术课程是高中学生的必修课程,是一门立足实践、注重创造、高度综合、科学与人文融合的课程 2.为何要开设通用技术课程? 随着科学技术突飞猛进地发展,技术成为我们生活中的客观存在,成为引起和应对社会变化的重要因素。因此,技术素养是当代青少年的基本素养,开设通用技术课程的核心目的就是培养学生的技术素养。 3.如何学好通用技术课程? ⑴在学习中要学会综合运用所学到的知识,善于思考,勤于动手,学中做,做中学,积极参与技术活动和亲身经历、体现设计过程。 ⑵学习中要采取主动学习、合作学习、网络学习等多种方式,促进能力的提升。 ⑶注意运用教材,明确“学习目标”,注重技术思想与技术方法
的学习,注重探究和实验。教学内容 [板书](一)技术的含义[板书]1.技术的产生创设情境 归纳总结指导学生阅读教材004页内容 人类在生活中,需要着衣以遮身御寒,于是有了纺织、印染、缝制技术的产生;需要进食以补充能量,于是有了食品烹饪加工技术以及农作物栽培、家畜饲养技术的产生;需要住所以避风挡雨、抵御外来侵害,于是有了建筑技术的产生;需要出行以认识更广阔的世界,于是有了车船制造技术的产生;需要交往以保持与别人的联系,于是有了通信邮电技术的产生…… 结论:从人类磨制石器、钻木取火开始,技术就为满足人类需要而开始了它的历史旅程。阅读教材人类的需求不断推动技术的产生和发展[板书]2.技术的发展创设情境 案例分析: 从火到灯――人类走向文明的历程 阅读教材理解技术的发展过程 归纳总结讨论: 1.如果人类没有控制和利用火的技术,没有发明灯,那么世界将会是怎样的? 2.人类对光的需求,怎样推动了照明技术的发展? 总结:人类的需求不断推动技术的产生和发展。讨论并回答案例分析:
E级GPS平面控制网技术设计书
E级GPS平面控制网技术设 计书 1、概述 本次gps平面控制测量任务和作业容是位于北部松花江主航道北侧,为配合本次控制测量课程设计任务,需在江心岛开发区约4.2平方公里的测区围建立E级GPS平面控制网。 2、测区自然地理概况和已有资料 2.1、测区自然地理概况 测区位于省市北部松花江主航道北侧,是松花江泛洪区自然形成的梭形岛,为河漫滩湿地。该岛地理位置优越,南北与市区相望,西隔宾洲铁路桥与太阳岛相望。 测区东西长约4.5公里,南北最宽约1.3公里,面积达4.2平方公里,平均海拔115米,位于松花江中游,属中温带大陆性季风气候,冬长夏短,全年平均降水量569.1毫米,降水主要集中在6-9月,夏季占全年降水量的60%。四季分明,冬季1月平均气温约零下19度;夏季7月的平均气温约23度。 测区围: 测区地理坐标为东经:126度37分—126度40分北纬:45度48分 实测围呈不规则形状,围面积约4.2平方公里。 2.2、测区已有资料成果情况 测区有google earth卫星遥感图一幅,该图可供图上选点。此外,测区有校区控制三角点2个,其数据如下: 3、测量技术设计依据 (1)GB-T-18314-2009《全球定位系统(GPS)测量规》 (2)CJJ 73-97《全球定位系统城市测量技术规程》 (3)CH 1002-95《测绘产品检查验收规定》 (4)CH 1003-95《测绘产品质量评定标准》 (5)CH / T1004《测绘技术设计规定》 (5)CJJ -8-99《城市测量规》 4、使用仪器 本次测量采用的GPS接收机型号是南方北极星GPS 9600,该GPS仪接受的信号是L1-C/A
施工测量平面高程控制网方案
施工测量平面(高程)控制网方案(成果) 一、概述 1、工程概况 秭归县九里移民安置小区功能完善项目共有5条道路系城市道路综合改造。各条道路分别为:九里二路全长195米,红线宽26米,车行道宽15米;建东大道全长764.55米,红线宽32米,车行道宽22.5米;迎宾路全长1940米,九里二路至陡茅路红线宽13米,陡茅路至杨贵店桥头红线宽15米,杨贵店桥头至止点红线宽18米。陡茅路全长370米,红线宽18米,车行道12米;二圣路全长151.39米。五条道路总长3421米。 2、设计提供测量点位 根据建设单位按设计人提供的测量控制点为GPS-E级点共7个,其点号分别为:GPS1、GPS3、GPS4、GPS8、GPS9、GPS10、GPS11。 二、测量方案 1、测量现有资料 平面坐标资料:按照业主提供的设计人移交的GPS控制点,因各点位之间有部分不能相互通视,施工过程无法进行,所以按照现场仅有通视条件,将首尾已知点GPS1、GPS8、GPS10进行了联测,并按照施工要求在中间各施工段进行了加密,其加密点编号分别为:JM1、JM2、JM3、JM4、JM5、JM6、JM7、JM8、JM9、JM10、JM11。 高程资料:按照建设单位提供的设计人移交的GPS-E级点,选择GPS8为基准点,进行闭合和附合测量。
2、测量依据 施工图纸:a、建东大道路线平面图、路线纵断面图及直线、曲线及转角表、纵坡、竖曲线表;b、九里二路路线平面图、路线纵断面图及直线曲线转角表、纵坡、竖曲线表;c、迎宾路路线平面图、路线纵断面图及直线、曲线及转角表、纵坡、竖曲线表;d、陡茅路路线平面图、路线纵断面图及直线、曲线及转角表、纵坡、竖曲线表;e、二圣路路线平面图、路线断面图及直线、曲线及转角表、竖曲线表。规范依据:a、《城镇道路工程施工与质量验收规范》(CJJ1-2008),该规范中相关测量章节内容。 3、平面控制测量 按照《城镇道路工程施工与质量验收规范》(CJJ1-2008)5.2.6导线测量之规定,进行布点测量。城镇道路工程施工首级控制(交桩点)测量、复核的主要技术指标如下表,经实测数据进行平差,其结果导线全长相对闭合差:k=fs/∑s=1/31157,测量成果详见后附件A。 导线测量的主要技术指标表5.2. 6-1 等级导线长度 (km)平均边长 (km) 测角中误 差(”) 测距中误 差(mm) 测回数 2”级仪器 方位角闭 合差(”) 导线全长相 对闭合差 备注 一级 4 0.5 5 1/30000 2 10√n≤1/15000 二级 2.4 0.25 8 1/14000 1 16√n≤1/10000 三级 1.2 0.1 12 1/7000 1 24√n≤1/5000 4、高程控制测量 按照由建设单位提供的GPS8点黄海高程点为基准点,分两个布点方案,方案一:由GPS8点开始沿陡茅路至迎宾路交叉路口至九里二
平面控制网技术设计书
四川建院东区 平面控制网技术设计 题目:四川建院东区平面控制网设计报告专业:工程测量技术 班级:测量1102 组别:一组 组员:黄龙邓国浩罗广宇伍玥环黄瑶岳鹏成陈诚 指导老师:郭豫宾 2012.3.20
平面控制网技术设计书 一、目的要求及任务范围 1、目的要求 应专业的要求,结合测区自然地理条件的特征,选择最佳布网方案,保证在所规定的时间内完成任务。应指导老师要求,布设四川建院东区四等控制网。控制网既要考虑与三等网的联系,又要考虑四川建院的独立性,充分体现布网的高精度和便利性。按设计要求将四川建院东区控制网沿测区周围布设,设计精度为四级,并按主轴线分成四个区域做到每个区域各有两个控制点。另外,还要根据布好的控制网实地放样出9个轴线点,并埋设标石。 2、任务范围 本测区范围:四川建筑职业技术学院东区。 。 二、测区的自然地理条件 1、地理概况 本测区为四川建院东区,属于德阳市旌阳区,离108国道不远,测区内建筑及草坪较多,地势较为平坦,地区大气能见度良好,交通便利,给测量带来方便。 2、气候条件 测区气候较好,阳光照射充足,年降水量不多,大多集中在春夏两季,全年平均气温已七、八月份最高。 3、交通情况 测区的北门外便是嘉陵江西路。 三.已有测量成果及利用 一.任务: ⑴初任务:根据已有地形图进行纸上定线和相关的内业工作,初步确定采 用的路线方案,为编制初步设计提供所需的基础资料。 ⑵定测目的:通过现场测量并进行优化,再实地放线定桩确定构造物的位 置,为施工设计提供资料 技术依据: ①《控制测量规范》。 ③GB12898-91《国家三、四等水准测量规范》。 二.坐标系统及图幅分幅 1) 平面采用1954年北京坐标系。 2)采用50*50的1:500的图幅;图幅内有明显地形、地物的应标注图名。
GPS控制网项目技术设计书说明书
GPS控制网项目技术设 计书说明书 1.概述 1.1 任务的目的 为了巩固大学测绘学院06级工程测量方向本科生所掌握的GPS知识,以及掌握利用GPS技术进行静态相对定位测量,培养和提高利用所学理论知识解决实际问题以及通过团队协作完成复杂项目的能力,测绘学院GPS课程组特组织此次校园实习。 1.2 任务的容 按《GPS测量与数据处理实习任务书》的要求,本项目拟采用GPS静态测量技术,在大学一校区、二校区、三校区、国软校区围布设一个包含20个点的国家C级控制网,具体实习容包括: (1)外业测量:技术设计,选点,外业观测计划,外业观测; (2)业数据处理:数据传输机格式转换,基线计算,网平差,成果质量控制,技术总结。 1.3 预计工作量 1.布设控制点20个; 2. 按国家C级网的标准测量GPS点20个,已知点为 7个; 3. 每个点上至少观测2时段,每时段1h。
2.测区概况 2.1 测区踏勘概况 测区分划:由于大学三校区与一、二校区被八一路分割,因此将测区对应分为一、二、三测区。 交通情况:由于测区即为大学校园,且测区围小,对测区的交通情况要求不高,且道路分布 施测环境:除少数点周围建筑物较为密集或受林木遮挡较为严重,大多数点都能满足测量所需的环境条件。 测区除了教五有个广播台外,无其他大功率电磁发射装置,所以电磁干扰较小。 测区水电供应情况良好,由于测区较小,各种供应都能得到保障。 2.2 测区已知点资料 9月15日上午,实习小组在测绘学院调集了控制点资料和大学控制点点位分布图;9月16日下午,实习小组对测区调到的已知点资料进行了现场踏勘,并布设好其他控制点。 2.2.1 已有平面控制资料 实习指导老师提供的控制点平面测量结果为 C级 GPS控制网54坐标系,3 度带,中央子午线为 114 度的成果。经实地踏勘,这些点保存完好。这 3 个已知点在测区里分布均匀,图形结构好,可以很好地起到平面控制效果。控制点详细情况参见附录一“控制点点之记”。 2.2.2 已有地形图资料 1《大学校园示意图》大学出版 2 大学控制点点位分布图
高中通用技术控制与设计教案苏教版必修2
第四单元控制与设计第一节控制的手段与应用 一、教学内容分析 本节是本章的第一节,可以说是本章的开始,也是本章的基础,对于本节知识的掌握有助于后面几节的学习。 二、教学对象分析 学生正处于高中阶段,对于生活中的一些控制虽然见过,但是由于生活经验不是很丰富,所以必须要老师引导才能发现问题。 三、教学目标 知识与技能 1.通过分析社会各领域的具体例子,理解控制的涵义及其在生产和生活中的应用。 2.通过学习,培养学生注意观察问题,发现问题,帮助学生了解控制的作用。 过程与方法: 通过视频导出新课,通过案例分析和课堂讨论理解控制的含义和了解控制的手段,并知道控制的应用。 情感态度与价值观: 激发学生了解控制,研究控制的兴趣与热情。 四、教学重点和难点 重点:理解控制的含义 难点:理解控制的含义 五、教学策略 采用多媒体进行教学,引导学生理解控制的含义和了解控制的手段及应用 六、教学准备 典型案例图片收集,课件制作,收集相关视频材料 七、教学过程 教学环节教师活动学生活动 导入新课[录像]通过卓别林的《摩登时代》录像片段,引入 新课。 学生观看
新课讲授一、控制是普遍存在。 用一些典型的、生活中的例子让学生了解控制是普 遍存在,对控制有初步的认识,打破其神秘感。 现代社会中的例子: 生产、生活中的例子(图片) 古代社会中的例子: 案例1:大禹治水(图片) 问题:大禹治水过程中,通过什么手段实现治理好 水患的目的? 答案:通过“疏通河道,泄洪为主”手段实现治 理好水患的目的。 案例2:木牛流马: 据研究:木牛和流马是汉代独轮手推车的两种改进 设计,通过改进使人的负重有所减轻。木牛是一种 轮子稍小一些的独轮手推车,载重大,前由人拉、 后由人推,运行较慢;流马载重小,轮子稍大一些, 由一人推,运行速度很快。诸葛亮所说“木牛流马” 应是比喻它们运行的灵便程度和载重量的大小:木 牛行动较笨而慢,像牛;流马行动敏捷而快,像马。 不是说它们外形像牛像马。 目的:帮助军队运送战略物资。 案例3:希罗自动门(图片) 希罗自动门的相关材料见教参P66或江苏版P107。 希罗自动门说明了什么道理? 道理是:利用气压和液压动力装置,实现自动开门、 关门。 总结:事物发展的结果可能是人们预先期望的,也 可能与预期的目标不相符,甚至是不希望得到的。 如果人们想达到某一特定的目的,就必须运用适当 的手段来实现。 那么,运用什么手段来实现呢? (引入控制的概念) 二、控制的涵义 控制是根据自己的目的,通过一定的手段使事 物沿着某一确定方向发展的行为和过程。 结合事例(用音乐喷泉的事例),重点阐明控 制的对象是什么;控制要达到什么目的;采取什么 控制手段。 [探究活动] 请同学们说说你在生活学习中所见到的应用控制 的事例。 学生讲述《大禹治水》的故事 让学生思考并回答 请学生讲述《木牛流马》的故 事 观看图片,并思考
D级GPS控制网设计书
D级GPS控制网设计书
北京建筑大学西城校区D级GPS控制网技术设计书 班级: 姓名: 学号:
δ=22)*(d b a 式中:δ—GPS 基线向量的弦长中误差(mm ),亦即等效距离误差。 a —GPS 接收机标称精度中的固定误差(mm )。 b —GPS 接收机标称精度中的比例误差系数(ppm )。 d —GPS 网中相邻点间的距离(km )。 四、布设原则 1.GPS 网一般应采用独立观测边构成闭合图形,如三角形、多边形或附合线路,以增加检核条件,提高网的可靠性。 2.GPS 网作为测量控制网,其相邻点间基线向量的精度,应分布均匀。 3.GPS 网点应尽量与原有地面控制点相结合。重合点一般不少于3个(不足时应联测),且在网中分布均匀,以可靠地确定GPS 网与地面之间的转换参数。 4.GPS 网点应考虑与水准点重合,而非重合点,一般应根据要求以水准测量(或相当精度的测量方法)进行联测,或在网中布设一定密度的
水准联测点。 5.为了便于GPS的测量观测和水准联测,减少多路径影响,GPS网点一般应设在视野开阔和交通便利的地方。 6.为了便于用经典方法联测或扩展,可在GPS网点附近布设一通视良好的方位点以建立联测方向,方向点与观测站距离一般应大于300米。 五、埋石、仪器、选点 1.埋石 平面控制点按照《工程测量 规范》标石规格埋设永久性标 石,标石可采用现场浇筑的方 法,埋石深度不小于0.6m,采 用预制标石时,埋设时底部须铺设0.2m水泥,以防止标石沉降。标石面应露出地面在1cm左右,导线点标石上宽度不小于15cm×15cm,下宽度不小于30cm×30cm。导线点位应易于保存、寻找,便于测角、测距;并且应按照导线点位选择的特殊要求(见《工程测量规范》)选埋。如图
施工控制网技术设计书
水利职业技术学院新校区 施工控制网及施工测量 技术设计书 批准单位:申报单位 审批意见:总工: 2011年月日 主要设计人: 2011年月日 审批人: 目录 一、测区概况 二、设计及作业依据 三、已有资料情况 四、平面坐标系统、高程系统和基本等高距 五、各等级控制点埋、密度
六、基础控制测量 七、图根控制测量 八、保证质量主要措施和要求 九、成果资料的整理与上交 为提高工程测量技术专业大三学生综合运用测量知识、测量仪器、测量规的能力,在本学期安排本实习,主要容有:测区踏勘、施工控制网的布设与施测等实习任务。 一、测区概况 本工程区位于省崇州市羊马镇永和大道6号占地面积854.3余亩,建筑面积261490平米,测区建筑及草坪较多,地势较为平坦,地区大气能见度良好,交通便利,给测量带来便。测区气候较好,照射充足,年降水量不多,大多集中在春夏两季,全年平均气温已七、八月份最高。测区的北门外便是永和大道。
二、设计及作业依据 1.GJJ8—99《城市测量规》 2.GB12898—91《三、四等水准测量规》 3.CJJ73—97《全球定位系统城市测量技术规程》 三、已有资料情况 1、水院新校区1:1000地形图; 2、水院新校区控制点成果表; 3、水院新校区控制点点之记。 4、水院新校区规划图 四、平面坐标系统、高程系统和基本等高距 1.平面坐标采用1954年北京坐标系。 2.高程系统采用1985高程基准。 3.基本等高距,1:500地形图为0.5m, 1:2000地形图为1m。 五、各等级控制点埋、密度 1.由于学院灾后重建不久,对于新校区出于保护以及满足教学要求,在造标埋时应注意:选点应该尽量在稳定坚实的混凝土路面上,做到不影响行人车辆以及校园美观。同时兼顾点位的长期保存性,以
水平控制网的布设程序的设计书
水平控制网的布设程序设 计书 §1 水平控制网的布设程序 建立水平控制网的程序 一、设计 1.了解任务 弄清用途(涉及精度,密度)、围(涉及首级等级、分级多少)、然后确定布设规格、等级、精度。 2.收集资料 ①测区已有的控制网成果资料。 ②测区小比例尺地形图。了解地形地貌、图上设计之用。 ③有关气象和地质方面的资料,用以考虑作业时间,觇标结构,埋石深度等。 3.测区踏勘 ①落实原有控制点的现状,决定是否仍可利用。 ②了解测区行政划分、居民、风土人文,以便测绘队进驻后能顺利开展工作。 ③了解测区交通、水源等情况,以便确定水准路线,配置交通工具、施工设备物资等。 4.图上设计 ①展绘已知点、网。 ②图上选点、组成网形。 一般应顾及: 图形结构良好;便于扩展和加密;顾及旁折光的影响;便于保存;避免造高标;避免在旧点附近另埋标石;离开高压线、公路、铁路一定距离。 ③精度估算(另讲) ④拟定水准联测路线,以便控制通过三角高程测量推算三角点高程中的误差积累。 5.实地选点(另讲) 6.编制技术设计书 技术设计书包括: ①任务委托书。包括委托单位、作业目的、围、工期等。 ②测区概况。包括自然地理条件、行政区划、人文等。 ③已有测量成果及其来源、精度分析、可用性论证。 ④坐标系统的选择及处理的论证,起始数据的配置和处理。 ⑤水平控制网布设方案。包括首级网的等级和布网方式;加密网的设计;精度估算过程及结果;精度统计表。
⑥高程网布设方案。包括水准网等级,路线长度,精度估算简要过程及结果;三角高程网形,精度估算过程及结果等。 ⑦技术依据及作业方法。包括执行何种规,仪器的选择及检验项目;观测方法及各项限差;概算容和平差方法等。 ⑧各种设计图表。包括水平、高程控制网略图;标石、觇标构造,规格,埋设方法示意图;工作量综合计算及工作进程计划表;装备,仪器,材料及经费预算表。 ⑨作业完成后应上交的资料清单。 ⑩领导部门的指示及审核意见。 二、施工 1.造标,埋石 在实地用觇标和标石标出控制点。 2.观测 测角,量边,测高差。 三、数据处理 1.概算 将以水准面为基准的观测成果归算到参考椭球上,再投影到高斯平面上。 2.平差及精度评定 平差:消除几何矛盾,提高精度,得到控制点坐标的最或然值。 精度评定:确定控制网及网中各推算元素的精度指标。 练习及作业: 阅读:p49,第二章,§2.7 §2 水平控制网的精度估算 一、精度估算的意义和方法 1.精度估算的意义 精度估算即是在控制网的设计阶段,预计控制网推算元素可能达到的精度,以便确定合理的布网方案及作业方法。使即将建立的控制网,既能达到使用所要求的精度,又避免盲目追求精度造成浪费。 2.精度估算的方法 电算法 根据间接平差原理,有误差方程: l x B V -=? (《平差基础》式5-1-7) 式中:V ——观测值的改正数 B ——系数阵 x ?——参数的最或然估计值,坐标平差中的坐标平差值 l —常量 由误差方程组成法方程: 0?=-Pl B x PB B T T (《平差基础》式5-1-10) 即 0?=-W x N 解法方程得到平差值:
矿大控制网技术设计书
工程测量控制网技术设计说明书 姓名: 学号: 班级: 指导教师:
灯湖矿区控制网设计书 一、灯湖矿区控制网设计任务通知书 XX测绘队: 矿区位于XX省XX煤田东北域。本矿区已列入国家经济建设计划,准备进行重点开发。根据建设计划,首先需施测80平方公里的1:2000地形图。图一为该矿区1:50000地形图,其中虚线范围为1:2000测图区。 为了加快建井速度,需在竖井间进行对向掘进,最大贯通距离为3km,矿井最大单翼长度5km,井深一般不超过800m。 为满足矿山设计、建井、生产三阶段测绘各种比例尺地形图、井巷贯通以及工业场地施工测量的需要,应在全矿区建立统一的具有足够精度密度的平面控制网与高程控制网。要求你队在任务通知书下达后一周内完成控制网技术设计,一月内完成建网任务。 XX省煤炭管理局年月日 二、测区概况简述 1.地理概况 本测区中心位置为。测区地面高程为+30~+244m。位于XX省XX县境内,属于华东丘陵地带,南部及中部为山地。其上林木繁茂,不利通视,其余为平原,密布村庄和厂矿,建筑群遍地,影响观测。灯湖位于测区东部,湖面开阔,中有大堤。 2.交通情况 测区内有铁路支线通过,公路四通八达,村间大道可行汽车,交通方便。 3.气候情况 测区地处华东近海地区,气候宜人。全年平均降雨量为1040mm,雨量集中于6、 7、8三个月份。全年平均气温+15℃,夏季气温较高,一般为30℃左右,冬季有雪, 但不寒冷,最低温度为-5℃,冻土线深度为0.1m。全年平均风力为2~3级,夏季略受台风影响。宜于野外作业时间为3~11月份,年平均作业时间利用率为21天/月。 4.居民及居民点 测区内地少人多,人口稠密,多为汉族,少数民族为回族。测量作业所需人力、物力、财料及食宿均可就地解决。 5.作业目的及任务范围 矿区位于XX市东北域,煤藏量为100亿吨。要求于2014年XX月之前,完成建网任务和提交1:2000和1∶1000地形图。在全矿区建立统一的具有足够精度密度的平面控制网与高程控制网。另外,为贯通工程需布设一个专用控制网,要求两近井点横向相对中误差小于30mm。矿区的测图总面积约为80km2。 三、已有测绘成果资料及其分析利用 1.三角网成果及其精度 测区内及附近有国家二等网点三个:玉山、太山、广具山。系1959年由XX测绘队施测,作业所依据的规范为《一、二、三、四等三角测量细则》(1958年)。三点标石保存完好。坐标系统为1954年北京坐标系,三度分带,中央子午线为11°。 该二等网的主要情况如下: (1)三角形(二等)平均边长8.3km。 (2)最小求距角42.1°。