SD-5(数字舵机使用详解)
S-D5数码舵机使用详解
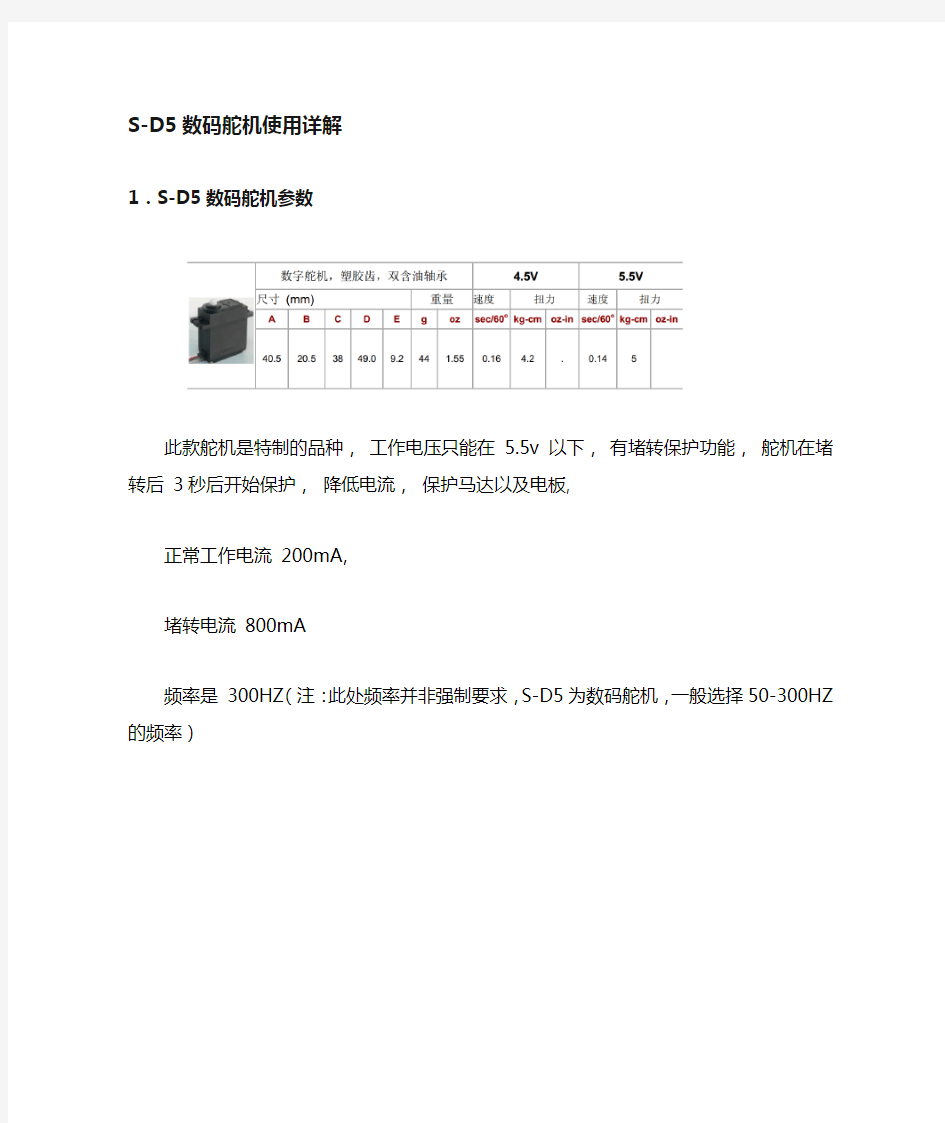
1.S-D5数码舵机参数
此款舵机是特制的品种,工作电压只能在 5.5v 以下,有堵转保护功能,舵机在堵转后 3秒后开始保护,降低电流,保护马达以及电板, 正常工作电流 200mA,
堵转电流 800mA
频率是 300HZ(注:此处频率并非强制要求,S-D5为数码舵机,一般选择50-300HZ的频率)
舵机原理
1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1) 发动机进气量,来控制发动机的拉力(或推力); 2) 副翼舵面(安装在飞机机翼后缘),用来控制飞机的横 滚运动; 3) 水平尾舵面,用来控制飞机的俯仰角; 4) 垂直尾舵面,用来控制飞机的偏航角; 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操 作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而
详细的舵机控制原理资料
目录 一.舵机PWM信号介绍 (1) 1.PWM信号的定义 (1) 2.PWM信号控制精度制定 (2) 二.单舵机拖动及调速算法 (3) 1.舵机为随动机构 (3) (1)HG14-M舵机的位置控制方法 (3) (2)HG14-M舵机的运动协议 (4) 2.目标规划系统的特征 (5) (1)舵机的追随特性 (5) (2)舵机ω值测定 (6) (3)舵机ω值计算 (6) (4)采用双摆试验验证 (6) 3.DA V的定义 (7) 4.DIV的定义 (7) 5.单舵机调速算法 (8) (1)舵机转动时的极限下降沿PWM脉宽 (8) 三.8舵机联动单周期PWM指令算法 (10) 1.控制要求 (10) 2.注意事项 (10) 3.8路PWM信号发生算法解析 (11) 4.N排序子程序RAM的制定 (12) 5.N差子程序解析 (13) 6.关于扫尾问题 (14) (1)提出扫尾的概念 (14) (2)扫尾值的计算 (14)
一.舵机PWM 信号介绍 1.PWM 信号的定义 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。 目前,北京汉库的HG14-M 舵机可能是这个过渡时期的产物,它采用传统的PWM 协议,优缺点一目了然。优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM 格式。 但是它是一款数字型的舵机,其对PWM 信号的要求较低: (1) 不用随时接收指令,减少CPU 的疲劳程度; (2) 可以位置自锁、位置跟踪,这方面超越了普通的步进电机; 其PWM 格式注意的几个要点: (1 ) 上升沿最少为0.5mS ,为0.5mS---2.5mS 之间; (2) HG14-M 数字舵机下降沿时间没要求,目前采用0.5Ms 就行;也就是说PWM 波形 可以是一个周期1mS 的标准方波; (3) HG0680为塑料齿轮模拟舵机,其要求连续供给PWM 信号;它也可以输入一个周 期为1mS 的标准方波,这时表现出来的跟随性能很好、很紧密。
舵机的工作原理
基于AT89C2051单片机的多路舵机控制器设计 摘要舵机是机器人、机电系统和航模的重要执行机构。舵机控制器为舵机提供必要的能源和控制信号。本文提出一种以外部中断计数为基础的PWM波形实现方法。该方法具有简单方便,成本低,可实现多路独立PWM输出的优点。 关键词A T89C205l 舵机控制器外部中断PWM 舵机是一种位置伺服的驱动器。它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。在微机电系统和航模中,它是一个基本的输出执行机构。 1 舵机的工作原理 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA66881。的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送人电机驱动集成电路BA6686,以驱动电机正反转。当电机转速一定时,通过级联减速齿轮带动电位器R。,旋转,直到电压差为O,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。 2 舵机的控制方法 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。 3 舵机控制器的设计 (1)舵机控制器硬件电路设计 从上述舵机转角的控制方法可看出,舵机的控制信号实质是一个可嗣宽度的方波信号(PWM)。该方波信号可由FPGA、模拟电路或单片机来产生。采用FPGA成本较高,用模拟电路来实现则电路较复杂,不适合作多路输出。一般采用单片机作舵机的控制器。目前采用单片机做舵机控制器的方案比较多,可以利用单片机的定时器中断实现PWM。该方案将20ms的周期信号分为两次定时中断来完成:一次定时实现高电平定时Th;一次定时实现低电平定时T1。Th、T1的时间值随脉冲宽度的变换而变化,但,Th+T1=20ms。该方法的优点是,PWM信号完全由单片机内部定时器的中断来实现,不需要添加外围硬件。缺点是一个周期中的PWM信号要分两次中断来完成,两次中断的定时值计算较麻烦;为了满足20ms 的周期,单片机晶振的频率要降低;不能实现多路输出。也可以采用单片机+8253计数器的实现方案。该方案由单片机产生计数脉冲(或外部电路产生计数脉冲)提供给8253进行计数,由单片机给出8253的计数比较值来改变输出脉宽。该方案的优点是可以实现多路输出,软件设计较简单;缺点是要添加l片8253计数器,增加了硬件成本。本文在综合上述两个单片机舵机控制方案基础上,提出了一个新的设计方案,如图4所示。 该方案的舵机控制器以A T89C2051单片机为核心,555构成的振荡器作为定时基准,单片机通过对555振荡器产生的脉冲信号进行计数来产生PWM信号。该控制器中单片机可以产生8个通道的PWM信号,分别由AT89C2051的P1.0~Pl.7(12~19引脚)端口输出。输出的8路PWM信号通过光耦隔离传送到下一级电路中。因为信号通过光耦传送过程中进行了反相,因此从光耦出来的信号必须再经过反相器进行反相。方波信号经过光耦传输后,前沿和后沿会发生畸变,因此反相器采用CD40106施密特反相器对光耦传输过来的信号进行整形,产生标准的PWM方波信号。笔者在实验过程中发现,舵机在运行过程中要从电源
航模舵机控制原理详解
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3. 舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有
舵机原理及其使用详解
舵机的原理,以及数码舵机VS模拟舵机 一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
舵机工作原理
控制思想 该模块的程序框图如图4.5 所示。车模在行驶过程中不断采样赛道信息,并通过分析车模与赛道相对位置判断车模所处赛道路况,是弯道还是直道,弯道时是左转还是右转。直道时小车舵机状态保持不变,弯道时左转或右转,计算转弯半径。我们所用舵机的标准PWM 周期为20ms,转动角度最大为左右90度,PWM调制波如图7.2所示。
当给舵机输入脉宽为0.5ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90度;当给舵机输入脉宽为1.5ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5ms,即占空比为2.5/20=12.5%的调制波时,舵机左转90度。可以推导出舵机转动角度与脉冲宽度的关系计算公式为: 注:其中t为正脉冲宽度(ms);θ为转动角度;当左转时取加法计算,右转时取减法计算结果。 当我们根据赛道弯度计算出转动角度以后便可以根据舵机的参数计算出脉冲宽度,控制舵机转动,舵机转角与PWM脉宽关系如表4-1所示。
在具体操作中PWM调制波的周期可以设置在20ms左右一定范围内,比如设置为10ms 或是30ms均可以使舵机正常转动,但是设置周期较长时,系统延迟时间较多,舵机转向会出现滞后,导致赛车冲出跑道;设置周期如果过短,系统输出PWM 调制波不稳定,舵机转动也会受影响,不能实现赛车的精确转向。经过反复测试,最终把输出PWM 调制波周期设定为13ms (用计数器实现)。 运行电机的转速以及舵机的转角,在软件上都是通过对PWM 波占空比进行设置来相应控制的。前面提到,舵机转角控制需要将两个
八位寄存器合成为一个十六位寄存器。程序中的舵机位置信号,当PWM调制波周期设为13ms时,因为总线频率为24MHz,用时钟SB,可计算得到16进制参数为9870H,舵机中间位置时占空比16进制参数为1680H,要分配给PWM6和7,分配时这2个端口的赋值必须是16进制,那么PWM模块初始化赋值为 PWMPER6= 0x98,PWMPER7= 0x70,PWMDTY6= 0x16,PWMDTY7= 0x80,因此这就牵涉到如何将1个十进制数分配为2个十六进制数问题。有2种方案,一种是除法取余,另一种是移位操作,前者编译生成的代码比后者要多,所以采用移位操作来实现,即取高位时与0xFF00先作“&”计算,然后将所得到的数向右移8位(>>8),即可取得高8位;同理,取低8位时只要与0x00FF作“&”计算即可(算法)。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
液压舵机操作实验
实验三液压舵机的操作实验 一、实验内容 1、液压舵机遥控系统操舵试验与调整。 2. 电子式随动操舵系统操舵实验。 二、实验要求 通过实验,熟悉典型液压航机及遥控系统的组成和工作原理,掌握操舵方法。 三、实验设备 YD100 -1.6 / 28型液压舵机1套 D D1型电子随动操舵仪1台 (一)YD100 - 1.6 / 28型液压舵机 该舵机由广西梧州华南船舶机械厂制造。现装于辅机实验室内。 其主要技术数据如下: 型号:Y D100- 1.6/ 2 8 公称力矩: 1.6 t m(15.6 KN.M) 转舵时间:28 sec 最大转角正负35度 工作压力:100 kg/cm2 (9.81MPa) 安全阀调整压力:110kg/cm2 (10.8MPa) 电动机型号:JO2H-12-4(Y80L2一4) 电动机功率:0.8 kW 电动机转速: 1500 r.p.m. 电动机电压。380 V 油泵型号;10 SCYI4一1 油泵排量;10 m L/r 最大工作压力:320 kg/cm2(31.4MPa) 电磁阀型号: 34 E 1M-B10H-T
电磁阀流量:40L/min 电磁阀最大工作压力:210 kg/cm2(20.59 MPa) 溢流阀型号:Y E-B10 C 电磁阀流量:40 L/min 溢流阀最大工作压力:140 kg/cm2(13.73MPa) 注:转舵时间系指单机而言,双机组工作时,转舵速度可提高一倍。 1.转舵机构 舵机的转舵机构是采用柱塞式油缸,柱塞的往复运动通过拨叉机构转换为舵柄的转动。所以,舵机的输出力矩与工作油压的关系为(见图3—1)。 πd2R△P M= Z η 4 cos2a 式中:Z——油缸对数(Z=1) d——柱塞直径(d=10cm) R——舵杆中线到油缸中心线的垂直距离(R=18cm) △P——油缸压差(△P=P1—P2) η——推舵装置机械效率(η≈0.8) a——舵的转角 舵机力矩特性M=f(a)如图3—2所示。舵机公称力矩系指舵机转动舵杆的最大力矩,即舵的转角为35°时舵机的输出力矩。. 该舵机的转舵机构主要由油缸、柱塞、舵柄、边舵柄、拉杆等组成,如图3—3所示。 2.轴向柱塞式油泵 该舵机的油泵为手动变量轴向柱塞泵,其工作原理如图3-4所示。它由湖南邵阳液压件厂生产。 泵的传动轴(19)通过花键与缸体(16)连接,且带动缸体(16)旋转,使
舵机控制原理以及分类作用
一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的: 收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,
输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
舵机原理
舵机原理 2009-11-09 19:03 1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1.发动机进气量,来控制发动机的拉力(或推力); 2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动; 3.水平尾舵面,用来控制飞机的俯仰角; 4.垂直尾舵面,用来控制飞机的偏航角; 遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。舵机因此得名:控制舵面的伺服电机。 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿 轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信 号待会再讲),控制电机转动,电机带动一系列齿轮组,减 速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相 连的,舵盘转动的同时,带动位置反馈电位计,电位计将输 出一个电压信号到控制电路板,进行反馈,然后控制电路板 根据所在位置决定电机的转动方向和速度,从而达到目标停 止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就 有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动 和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速 之分,体积有大中小三种之分等等,组合不同,价格也千差 万别。例如,其中小舵机一般称作微舵,同种材料的条件下 是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据 需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的 是地线,这辆根线给舵机提供最基本的能源保证,主要是电 机的转动消耗。电源有两种规格,一是4.8V,一是6.0V, 分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要 大一些,具体看应用条件;另外一根线是控制信号线,Futaba 的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA 的某些型号的舵机引线电源线在边上而不是中间,需要辨 认。但记住红色为电源,黑色为地线,一般不会搞错。
舵机工作原理
舵机工作原理 舵机在6 V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2 V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6 V。图2为舵机供电电路。 舵机由舵盘、位置反馈电位计、减速齿轮组、直流电动机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。从而达到舵机精确控制转向角度的目的。舵机工作原理框图如图3所示。 2.2 舵机的安装与调节 舵机的控制脉宽与转角在-45°~+45°范围内线性变化。对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
末端固定转向传动连杆,其表达式为: 加长力臂后欲使前轮转动相同角度时,在舵机角速度ω相同的条件下舵机力臂加长后增大了线速度v,最终使得舵机的转向角度θ减小。舵机输出转角θ减小,舵机的响应时间t也会变短。同时由式(1)可推出线速度口增大后,前轮转向所需的时间t相应也会变短,其表达式为:t=ds/dv(2) 此外,当舵机连杆水平且与舵机力臂垂直时,得到力矩M,可由式(3)表示:M=FRsinα(3) 说明当舵机连杆和舵机力臂垂直时α=900°,此时si nα得到最大值。在舵机力臂R一定和外力F相同条件下,舵机产生的力矩M最 大,实现前轮转向的时间最短。
舵机工作原理要点
舵机工作原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。
3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。
有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的: 收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能
提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用图3来表示。 可变脉宽输出试验(舵机控制) 原创:xidongs 整理:armok / 2004-12-05 / https://www.360docs.net/doc/9d148797.html,
数字舵机原理
dark课堂:舵机的原理,以及数码舵机 VS 模拟舵机一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
舵机的构造和原理
舵机的构造和原理 2008-06-20 08:50:29 来源: 作者: 【大中小】评论:0条 前言 舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。 本文章主要探讨适合各等级直升机各工作部位所使用的舵机,至於其它种类的模型,如飞机、车、船,则不在本篇文章讨论范围之内。 舵机的构造 舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已到达定位。 位置检测器其实就是可变电阻,当舵机转动时电阻值也会跟着改变,测量电阻值便可知转动的角度。 一般的伺服马达是将细铜线缠绕在三极转子上,当电流流过线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。舵机为求转速快、耗电小,於是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的五极中空转子,并将磁铁置於圆柱体内,这就是无核心马达。
为了适合不同的工作环境,有防水及防尘设计的舵机。并且因应不同的负载需求,舵机的齿轮有塑胶及金属的区分。较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。 目前新推出FET舵机,主要是采用FET(Field Effect Transistor)场效电晶体。FET具有内阻低的优点,因此电流损耗比一般电晶体少。
舵机金属齿轮材料特性
C3604材料特性: C3604环保铜具有强度高,组织致密均匀,耐蚀性好,切削、钻孔等机加工性能极佳,且具有加工铜屑均匀细小、加工表面光洁等特点,适用高速自动加工.C3604环保铜切削性能优异,用于螺栓、螺母、小螺丝、轴、齿轮、阀以及钟表、化油器、IT产业、精密仪表的零部件。其GD高精度六角铜棒可用于进口高档数控机床加工制造高精度零件 具有极好的切削、钻孔性能,强度高,塑性好,耐腐蚀性强。适用于自动车床、数控车床加工有生态环保和卫生安全要求的产品,如电子、电讯、电气接插件、联接件,五金、照相、家电、饮用水工程的零部件。 化学成份(%): Cu :57.0-61.0 Fe :≤0.5 Pb :1.8-3.7 Sn :Fe+Sn≤1.2 Zn :REM C3604密度是8.5g/cm C3604黄铜是日本工业标准的牌号, 其铜含量为57-61%, 铅含量为1.8-3.7%. 铁和锌小于等于1%,余量为锌。硬度大于等于HV80(维氏硬度)。 HPb59-1 表示铜的质量分数为59% ,含主加元素铅的质量分数为1% ,余量为锌的铅黄铜。 C3604相当于国产HPB60-2,C3710相当于国产HPB59-1。 12L14材料特性: 12L14易切削钢的用途: 主要用于制作受力较小而对尺寸和光洁度要求严格的仪器仪表、手表零件、汽车、机床和其他各种机器上使用的,对尺寸精度和光洁度要求严格,而对机械性能要求相对较低的标准件,如齿轮、轴、螺栓、阀门、衬套、销钉、管接头、弹簧座垫及机床丝杠、塑料成型模具、外科和牙科手续用具等。 12L14化学成分: 12L14含C:0.13% Mn:0.7-1.0% P:0.07-0.12% S:0.24-0.33% Pb:0.1-0.35% 12L14是易切削结构钢,易切削钢是易被(车、铣、拉、刨、钻等)切削加工的钢种,又叫自动机床加工用钢,简称自动钢。它是为适应机械加工自动化和流水作业线生产而产生的。这类钢可以用较高的切削速度和较深的吃刀量进行切削加工,而且由于加入钢中的易切削元素使切削抗力减小和因加入元素本身的特性及形成 的化合物起润滑刀具刃部的作用,使切屑易断,减轻了磨损,从而提高了被加工零件的光洁度和精度,提高了刀具寿命和生产效率。 12L14属于铅硫复合易切削结构钢。铅易切钢里,铅以微小单质金属颗粒分布于钢中并在钢中不固熔,在切削加工过程中,刀具与加工件之间产生强烈的摩擦,使钢中的铅颗粒呈熔融状析出,从而起到润滑作用来改善钢的切削性能,使钢的切屑细碎,降低刀具磨损,最终延长刀具寿命。与不含铅的钢相比,含铅钢的切削性能可提高20~50%,而机械性能与热处理性能基本保持不变,对冷、热加工性和焊接性也无影响。铅易切削钢已广泛用作制造精密仪表零件、汽车零件、各类机械的重要零件。但是铅易切削钢的接触疲劳低,故不宜用于承受疲劳应力负荷大的齿轮、轴承等零部件。
舵机的相关原理与控制原理
1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧:
这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。 为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。主要还是 delay memory这样的具有创造性的指令发挥了功效。该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只
舵机及转向控制原理
舵机及转向控制原理 1、概述 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机使用中应注意的事项 6、辉盛S90舵机简介 7、如何利用程序实现转向 8、51单片机舵机测试程序 1、概述 舵机也叫伺服电机,最早用丁船舶上实现其转向功能,由丁可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1、图2所示。
舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。 2、舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
变速齿轮组 诃调电位器小型宜流电机 fff 图4舵机的组成示意图 图5舵机组成 舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有 两种规格,一是4.8V, 一是6.0V,分别对应不同的转矩标准,即输出力矩不同, 6.0V 对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANW曲某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。
输出转轴 电源线知 地线GND 控制线 图6舵机的输出线 3、舵机工作原理 控制电路板接受来自信号线的控制信号, 控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘 转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进 行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到 目标停止。其工作流程为:控制信号T控制电路板T电机转动T齿轮组减速T舵盘转动T位置反馈电位计T控制电路板反馈。流,才可发挥舵机应有的性能。 舵机的控制信号周期为20MS的脉宽调制(PWM信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0—180度,呈线性变化。也就是说,给他提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置上如图7所求。舵机内部有一个基准电路,产生周期为20MS宽度1.5MS的基准信号,有一个比出较器,将外加信号与基准信号相比较,判断出方向和大小,从而生产电机的转动信号。由此可见,舵机是一种位置伺服驱动器,转动范围不能超过180度,适用丁那些需要不断变化并可以保持的驱动器中,比如说机器人的关 节、飞机的舵面等。
舵机工作原理
转叶式液压舵机产品介绍 上海海事大学摘编2010-01-18 关键字:液压舵机浏览量:627 大型船舶几乎全部采用液压舵机。电动舵机仅仅用于一些小型船舶上。液压舵机是利用液体的不可压缩性及流量、流向的可控性达到操舵的目的。转叶式液压舵机是一种新型的液压舵机。它与其他类型的舵机相比,具有体积小、重量轻、结构简单、制造容易、维护保养方便等一系列优点。 一、国内外研究现状: 转叶式液压舵机至今已有近60年的历史,但这种新舵机并非所有从事船舶制造的国家都能生产,目前只有少数几个国家掌握了这门设计和生产技术。例如:德国、挪威、俄罗斯和日本等他们从二次世界大战后50年代初开始先后研究和生产这种新舵机。 德国AEG通用电气公司生产转叶式液压舵机已闻名世界并占垄断地位,产品较多,是目前远洋船舶上所经常选用的设备之一。该公司生产四种不同系列,分为RD型;RDC型;RC型;RB型。最高压力12.5MPa;最大扭矩890吨米。由于采用翻边式结构,金属条密封形式,结构合理,翻边受力变形量小,可使用较高压力,容积效率也较高。但是安装工艺较复杂(与端盖式比较),不过RBZ(RB)系列组装化程度较高,安全阀,电动机,油泵机组均安装在转叶油缸两侧,可整体套入舵轴(与舵轴联接方式均为套装式)。大大简化了船上安装工作量。英国布朗公司、日本三井公司、三菱公司和美国等国家凭德国AEG公司专利进行成批生产各种系列的转叶式液压舵机。挪威FRYDENBO公司生产的转叶式液压舵机,工作压力2.5MPa,安全阀调节压力为5MPa,最大扭矩为600吨米。液压系统是以螺杆泵做主泵的定量泵系统。由手动和电动液压操纵组成一体。该公司产品的特点是采用端盖式带凹形橡胶密封,与舵轴联接形式为套装式,转叶舵机固定在船壳底座上,无缓冲装置,由于其使用压力较低,采用高粘度油液,故使用可靠,安装、维护保养简单。俄罗斯于1959年在目前的乌克兰境内试制了首台转叶式液压舵机,并在1962年装在船上考验其性能,而后进行了批量生产。这种舵机的结构形式为端盖式,金属条密封,工作压力小于6.5MPa。与舵轴联接方式为对接式。 我国自1969年在广州研制成功第一台转叶式舵机以来,由于这种舵机具有一系列优点,因此发展很快。现在这种舵机品种规格很多,结构不一。有翻边式结构(江南造船厂);端盖
舵机常见问题解决
伺服马达原理与控制, 模拟舵机和数字舵机的区别, 以及常见问题解决 伺服马达原理与控制 1、伺服马达内部结构 伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低 伺服马达内部结构图 2、伺服马达的工作原理 伺服马达是一个典型闭环反馈系统,其原理可由下图表示:
伺服马达工作原理图 减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。 3、如何控制伺服马达 标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。 输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms—2ms 之间,而低电平时间应在5ms到20ms之间,并不很严格,下表表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位置的关系:
4、伺服马达的电源引线 电源引线有三条,如图中所示。伺服马达三条线中白色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线(红色),一般工作电源是5V。第三条是地线。 5、伺服马达的运动速度 伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。 6、使用伺服马达的注意事项 除非你使用的是数码式的伺服马达,否则以上的伺服马达输出臂位置只是一个不准确的大约数。 普通的模拟微型伺服马达不是一个精确的定位器件,即使是使用同一品牌型号的微型伺服马达产品,他们之间的差别也是非常大的,在同一脉冲驱动时,不同的伺服马达存在±10o 的偏差也是正常的。 正因上述的原因,不推荐使用小于1ms及大于2ms的脉冲作为驱动信号,实际上,伺服马达的最初设计表也只是在±45o的范围。而且,超出此范围时,脉冲宽度转动角度之间