2014美赛A题元胞自动机完整代码,做出来了有木有~
2014美赛A题元胞自动机完整代码,做出来了有木有~ 2014美赛相关MATLAB程序(基于NS模型)
主程序:NaSch_3.m程序代码
% 单车道最大速度3个元胞开口边界条件加速减速随机慢化 clf
clear all
%build the GUI
%define the plot button plotbutton=uicontrol('style','pushbutton',... 'string','Run', ...
'fontsize',12, ...
'position',[100,400,50,20], ...
'callback', 'run=1;');
%define the stop button
erasebutton=uicontrol('style','pushbutton',... 'string','Stop', ...
'fontsize',12, ...
'position',[200,400,50,20], ...
'callback','freeze=1;');
%define the Quit button quitbutton=uicontrol('style','pushbutton',... 'string','Quit', ...
'fontsize',12, ...
'position',[300,400,50,20], ...
'callback','stop=1;close;');
number = uicontrol('style','text', ... 'string','1', ...
'fontsize',12, ...
'position',[20,400,50,20]);
%CA setup
n=100; %数据初始化
z=zeros(1,n); %元胞个数
z=roadstart(z,5); %道路状态初始化,路段上随机分布5辆 cells=z;
vmax=3; %最大速度
v=speedstart(cells,vmax); %速度初始化 x=1; %记录速度和车辆位置memor_cells=zeros(3600,n);
memor_v=zeros(3600,n);
imh=imshow(cells); %初始化图像白色有车,黑色空元胞 set(imh,
'erasemode', 'none')
axis equal
axis tight
stop=0; %wait for a quit button push run=0; %wait for a draw freeze=0; %wait for a freeze(冻结)
while (stop==0)
if(run==1)
%边界条件处理,搜素首末车,控制进出,使用开口条件
a=searchleadcar(cells);
b=searchlastcar(cells);
[cells,v]=border_control(cells,a,b,v,vmax);
i=searchleadcar(cells); %搜索首车位置
for j=1:i
if i-j+1==n
[z,v]=leadcarupdate(z,v);
1
continue;
else
%======================================加速、减速、随机慢化if cells(i-j+1)==0; %判断当前位置是否非空
continue;
else v(i-j+1)=min(v(i-j+1)+1,vmax); %加速
%=================================减速
k=searchfrontcar((i-j+1),cells); %搜素前方首个非空元胞位置if k==0; %确定于前车之间的元胞数
d=n-(i-j+1);
else d=k-(i-j+1)-1;
end
v(i-j+1)=min(v(i-j+1),d);
%==============================%减速
%随机慢化
v(i-j+1)=randslow(v(i-j+1));
new_v=v(i-j+1);
%======================================加速、减速、随机慢化%更新车辆位置
z(i-j+1)=0;
z(i-j+1+new_v)=1;
%更新速度
v(i-j+1)=0;
v(i-j+1+new_v)=new_v;
end
end
end
cells=z;
memor_cells(x,:)=cells; %记录速度和车辆位置
memor_v(x,:)=v;
x=x+1;
set(imh,'cdata',cells) %更新图像
%update the step number diaplay
pause(0.2);
stepnumber = 1 + str2num(get(number,'string'));
set(number,'string',num2str(stepnumber))
end
if (freeze==1)
run = 0;
freeze = 0;
end
drawnow
end
//////////////////////////////////////////////////////////////////// ///
函数:border_control.m程序代码
Function[new_matrix_cells,new_v]=border_control(matrix_cells,a,b,v,v max)
%边界条件,开口边界,控制车辆出入
%出口边界,若头车在道路边界,则以一定该路0.9离去
n=length(matrix_cells);
if a==n
2
rand('state',sum(100*clock)*rand(1));%??ò????ú??×ó
p_1=rand(1); %产生随机概率
if p_1<=1 %如果随机概率小于0.9,则车辆离开路段,否则不离口
matrix_cells(n)=0;
v(n)=0;
end
end
%入口边界,泊松分布到达,1s内平均到达车辆数为q,t为1s if b>vmax t=1;
q=0.25;
x=1;
p=(q*t)^x*exp(-q*t)/prod(x); %1s内有1辆车到达的概率
rand('state',sum(100*clock)*rand(1));
p_2=rand(1);
if p_2<=p
m=min(b-vmax,vmax);
matrix_cells(m)=1;
v(m)=m;
end
end
new_matrix_cells=matrix_cells;
new_v=v;
//////////////////////////////////////////////////////////////////// ///
函数:leadcarrupdate.m程序代码
function [new_matrix_cells,new_v]=leadcarupdate(matrix_cells,v) %第一辆车更新规则
n=length(matrix_cells);
if v(n)~=0
matrix_cells(n)=0;
v(n)=0;
end
new_matrix_cells=matrix_cells;
new_v=v;
//////////////////////////////////////////////////////////////////// ///
函数:randslow.m程序代码
function [new_v]=randslow(v)
p=0.3; %慢化概率
rand('state',sum(100*clock)*rand(1));%??ò????ú??×ó p_rand=rand; %产生随机概率
if p_rand<=p
v=max(v-1,0);
end
new_v=v;
//////////////////////////////////////////////////////////////////// ///
3
函数:roadstart.m程序代码
function [matrix_cells_start]=roadstart(matrix_cells,n) %道路上的车辆初始化状态,元胞矩阵随机为0或1,matrix_cells初始矩阵,n初始车辆数k=length(matrix_cells);
z=round(k*rand(1,n));
for i=1:n
j=z(i);
if j==0
matrix_cells(j)=0;
else
matrix_cells(j)=1;
end
end
matrix_cells_start=matrix_cells;
//////////////////////////////////////////////////////////////////// ///
函数:searchfrontcar.m程序代码
function
[location_frontcar]=searchfrontcar(current_location,matrix_cells) i=length(matrix_cells);
if current_location==i
location_frontcar=0;
else
for j=current_location+1:i
if matrix_cells(j)~=0
location_frontcar=j;
break;
else
location_frontcar=0;
end
end
end
//////////////////////////////////////////////////////////////////// ///
函数:searchlastcar.m程序代码
function [location_lastcar]=searchlastcar(matrix_cells) %搜索尾车位置
for i=1:length(matrix_cells)
if matrix_cells(i)~=0
location_lastcar=i;
break;
else %如果路上无车,则空元胞数设定为道路长度
location_lastcar=length(matrix_cells);
end
end
//////////////////////////////////////////////////////////////////// ///
4
函数:searchleadcar.m程序代码
function [location_leadcar]=searchleadcar(matrix_cells)
i=length(matrix_cells);
for j=1:i
if matrix_cells(i-j+1)~=0
location_leadcar=i-j+1;
break;
else
location_leadcar=0;
end
end
//////////////////////////////////////////////////////////////////// ///
函数:speadstart.m程序代码
function [v_matixcells]=speedstart(matrix_cells,vmax) %道路初始状态车辆速度初始化
v_matixcells=zeros(1,length(matrix_cells)); for i=1:length(matrix_cells)
if matrix_cells(i)~=0
v_matixcells(i)=round(vmax*rand(1));
end
end
5
元胞自动机(CA)代码及应用
元胞自动机(CA)代码及应用 引言 元胞自动机(CA)是一种用来仿真局部规则和局部联系的方法。典型的元胞自动机是定义在网格上的,每一个点上的网格代表一个元胞与一种有限的状态。变化规则适用于每一个元胞并且同时进行。典型的变化规则,决定于元胞的状态,以及其(4或8 )邻居的状态。元胞自动机已被应用于物理模拟,生物模拟等领域。本文就一些有趣的规则,考虑如何编写有效的MATLAB的程序来实现这些元胞自动机。 MATLAB的编程考虑 元胞自动机需要考虑到下列因素,下面分别说明如何用MATLAB实现这些部分。并以Conway的生命游戏机的程序为例,说明怎样实现一个元胞自动机。 ●矩阵和图像可以相互转化,所以矩阵的显示是可以真接实现的。如果矩阵 cells的所有元素只包含两种状态且矩阵Z含有零,那么用image函数来显示cat命令建的RGB图像,并且能够返回句柄。 imh = image(cat(3,cells,z,z)); set(imh, 'erasemode', 'none') axis equal axis tight ●矩阵和图像可以相互转化,所以初始条件可以是矩阵,也可以是图形。以下 代码生成一个零矩阵,初始化元胞状态为零,然后使得中心十字形的元胞状态= 1。 z = zeros(n,n); cells = z; cells(n/2,.25*n:.75*n) = 1; cells(.25*n:.75*n,n/2) = 1; ●Matlab的代码应尽量简洁以减小运算量。以下程序计算了最近邻居总和,并 按照CA规则进行了计算。本段Matlab代码非常灵活的表示了相邻邻居。 x = 2:n-1; y = 2:n-1; sum(x,y) = cells(x,y-1) + cells(x,y+1) + ... cells(x-1, y) + cells(x+1,y) + ... cells(x-1,y-1) + cells(x-1,y+1) + ... cells(x+1,y-1) + cells(x+1,y+1); cells = (sum==3) | (sum==2 & cells); ●加入一个简单的图形用户界面是很容易的。在下面这个例子中,应用了三个 按钮和一个文本框。三个按钮,作用分别是运行,停止,程序退出按钮。文框是用来显示的仿真运算的次数。 %build the GUI %define the plot button plotbutton=uicontrol('style','pushbutton',...
计算机考博试题计算理论及答案
计算理论 字母表:一个有穷的符号集合。 字母表上的字符串是该字母表中的符号的有穷序列。 一个字符串的长度是它作为序列的长度。 连接反转Kleene星号L* ,连接L中0个或多个字符串得到的所有字符串的集合。 有穷自动机:描述能力和资源极其有限的计算机模型。 有穷自动机是一个5元组M=(K,∑,?,s,F),其中 1)K是一个有穷的集合,称为状态集 2)∑是一个有穷的集合,称为字母表 3)?是从KX∑→K的函数,称为转移函数 4)s∈K是初始状态 5)F?K是接收状态集 M接收的语言是M接收的所有字符串的集合,记作L(M). 对于每一台非确定型有穷自动机,有一台等价的确定型有穷自动机 有穷自动机接受的语言在并、连接、Kleene星号、补、交运算下是封闭的。 每一台非确定型有穷自动机都等价于某一台确定型有穷自动机。一个语言是正则的当且仅当它被有穷自动机接受。 正则表达式:称R是一个正则表达式,如果R是
1)a,这里a是字母表∑中的一个元素。 2)?,只包含一个字符串空串的语言 3)?,不包含任何字符串的语言 4)(R1∪R2),这里R1和R2是正则表达式 5)(R10R2),这里R1和R2是正则表达式 6)(R1*),这里R1*是正则表达式 一个语言是正则的当且仅当可以用正则表达式描述。 2000年4月 1、根据图灵机理论,说明现代计算机系统的理论基础。 1936年,图灵向伦敦权威的数学杂志投了一篇论文,题为《论数字计算在决断难题中 的应用》。在这篇开创性的论文中,图灵给“可计算性”下了一个严格的数学定义,并 提出著名的“图灵机”(Turing Machine)的设想。“图灵机”不是一种具体的机器,而是一种思想模型,可制造一种十分简单但运算能力极强的计算机装置,用来计算所有能想像得到的可计算函数。这个装置由下面几个部分组成:一个无限长的纸带,一个读写头。(中间那个大盒子),内部状态(盒子上的方块,比如A,B,E,H),另外,还有一个程序对这个盒子进行控制。这个装置就是根据程序的命令以及它的内部状态进行磁带的读写、移动。工作带被划分为大小相同的方格,每一格上可书写一个给定字母表上的符号。控制器可以在带上左右移动,它带有一个读写出一个你期待的结果。这一理论奠定了整个 现 代计算机的理论基础。“图灵机”更在电脑史上与“冯·诺依曼机”齐名,被永远载
交通流中的NaSch模型及MATLAB代码元胞自动机完整
元胞自动机NaSch模型及其MATLAB代码 作业要求 根据前面的介绍,对NaSch模型编程并进行数值模拟: ●模型参数取值:Lroad=1000,p=,Vmax=5。 ●边界条件:周期性边界。 ●数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的 结果。 ●基本图(流量-密度关系):需整个密度范围内的。 ●时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画 500个时间步即可)。 ●指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思 路。 ●? 流量计算方法: 密度=车辆数/路长; 流量flux=density×V_ave。 在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N; 流量flux=N/T。 ●? 在计算过程中可都使用无量纲的变量。 1、NaSch模型的介绍 作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。 ●时间、空间和车辆速度都被整数离散化。
● 道路被划分为等距离的离散的格子,即元胞。 ● 每个元胞或者是空的,或者被一辆车所占据。 ● 车辆的速度可以在(0~Vmax )之间取值。 2、NaSch 模型运行规则 在时刻t 到时刻t+1的过程中按照下面的规则进行更新: (1)加速:),1min(max v v v n n +→ 规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。 (2)减速:),min(n n n d v v → 规则(2)确保车辆不会与前车发生碰撞。 (3)随机慢化: 以随机概率p 进行慢化,令:)0, 1-min(n n v v → 规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。这一规则也是堵塞自发产生的至关重要因素。 (4)位置更新:n n n v x v +→ ,车辆按照更新后的速度向前运动。 其中n v ,n x 分别表示第n 辆车位置和速度;l (l ≥1)为车辆长度;11--=+n n n x x d 表示n 车和前车n+1之间空的元胞数;p 表示随机慢化概率;max v 为最大速度。 3、NaSch 模型实例 根据题目要求,模型参数取值:L=1000,p=,Vmax=5,用matlab 软件进行编程,扔掉前11000个时间步,统计了之后500个时间步数据,得到如下基本图和时空图。 程序简介 初始化:在路段上,随机分配200个车辆,且随机速度为1-5之间。 图是程序的运行图,图中,白色表示有车,黑色是元胞。
计算机研究生《计算理论》复习题
1、请你从形式定义、计算过程和对应的语言特点关系等诸方面综合比较DFA、PDA和图灵机 2、对于简单文法(正则语言、上下文无关语言),能够根据其产生式写出其语言 3、正则语言泵引理和上下文无关语言泵引理的理解、相互比较和应用 4、最简DFA、最简PDA的概念;DFA和PDA的简化过程;(带ε和不带ε的)NFA化简成最简DFA的过程 5、图灵机的Golder编码和通用图灵机的编码 6、上下文无关文法的乔姆斯基范式 7、DFA的计算过程 8、上下文无关文法的推导过程以及其歧义相关概念及分析 9、关于四类乔姆斯基语言及其对应的自动机类型特点分析 10、四类乔姆斯基语言的各种运算类型并形式化表示 11、关于CFG和DFA的若干判定问题 12、关于若干渐进符号:同阶渐进符号Θ、大O、小O和大Ω符号的含义和用法 13、请从NP类问题、P类问题、确定型单带TM、确定型多带TM、非确定型TM等角度综述 时间复杂性规律 相关例题: 1、请你综合比较DFA、PDA和图灵机 2、请写出下列表达式生成的正则语言 1)设有文法G=(V,T,P,S),其中V={S,A,B},T={a,b},P:S→aB;S→bA;A→bAA;A →a;A→aS;B→b;B→bS;B→aBB 请写出L(G)= 2)设一个有穷自动机M=(Q,∑,δ,q0,F),其中Q={q0,q1,q2,q3),∑={0,1}, F={q0},δ如下: δ(q0,0)=q2, δ(q0,1)=q1, δ(q1,0)=q3, δ(q1,1)=q0 δ(q2,0)=q0, δ(q2,1)=q3, δ(q3,0)=q1, δ(q3,1)=q2 请写出L(M)= 3)设有文法G=({S,A},{a,b,c,d};R,S),其中R:S→aSd|aAd, A→bAc|bc 请写出L(G)= 3、用泵引理证明下列论点 1)A1={a n b n c n|n≥0}不是正则语言 2)D={ww|w∈{0,1}*}不是上下文无关语言 4、把下面状态转换图代表的DFA变化成最简DFA
元胞自动机-森林火灾模型MATLAB代码
% 元胞自动机:森林火灾模型 % 规则: % (1)正在燃烧的树变成空格位; % (2)如果绿树格位的最近邻居中有一个树在燃烧,则它变成正在燃烧的树;% (3)在空格位,树以概率p生长; % (4)在最近的邻居中没有正在燃烧的树的情况下树在每一时步以概率f(闪%? 电)变为正在燃烧的树。 % 参考文献: % 祝玉学,赵学龙译,<<物理系统的元胞自动机模拟>>, p23 close all; clc; clear; figure; p=0.3;% 概率p f=6e-5;% 概率f axes; rand('state',0); set(gcf,'DoubleBuffer','on'); % S=round((rand(300)/2+0.5)*2); S=round(rand(300)*2); Sk=zeros(302);
Sk(2:301,2:301)=S;%%加边开始的森林初值% 红色表示正在燃烧(S中等于2的位置) % 绿色表示绿树(S中等于1的位置) % 黑色表示空格位(S中等于0的位置) C=zeros(302,302,3); R=zeros(300); G=zeros(300); R(S==2)=1; G(S==1)=1; C(2:301,2:301,1)=R; C(2:301,2:301,2)=G; Ci=imshow(C); ti=0; tp=title(['T = ',num2str(ti)]);%%时间记录while 1; ti=ti+1; St=Sk; %%St表示t时刻的森林情况 St(Sk==2)=0; % for rule (1) Su=zeros(302); Sf=Sk;%%Sf表示模拟着火的过程 Sf(Sf<1.5)=0;%%只留下着火点
湖南大学计算理论引论期末试题2006年秋本科试卷a-答案
2006年秋《计算理论基础》本科生试卷 填空题 1、确定型有穷自动机的形式定义是一个5元组(Q,∑,δ,q0,F)其中: (1)Q为有穷状态集,(2)∑有穷字母表,(3)δ(q,a)是转移函数,它的第1个自变量为q∈Q,第二个自变量a∈∑,其结果δ(q,a)∈Q,即为Q×∑→Q的函数(映射),(4)q0为初始状态(一般只有一个),(5)F有一些接受状态(可以为多个。 2、非确定型有穷自动机N接受字符串w=b1b2…b m,是指存在状态序列r0,r1,…,r m,且满足:(1)r0=q0;(2)r i+1∈δ(r i,a i+1) (i=0,1,…,m-1),(3)r m∈F。 3、正则表达式的定义是:(1)a∈∑,空串ε,空集Φ均为合法的正则表达式,(2)若R1,R2是正则表达式,则(R1?R2)、R1?R2、R1*均是正则表达式。 4、将正则表达转换成自动机时,先建立单个字符的自动机,再用并、连、星号运算得到复杂正则表达的自动机,而将自动机转换为正则表达式时,需要先建立新开始状态与一个新接受态,在新开始状态与原开始状态之间连上空串边,在原来所有的接受状态与新接受状态间连空串边。 5、对于正则语言A的任意字符串s,当其长度≥p(泵长度)时,则一定存在满足|y|>0、|xy|≤p分解方式S=xyz,使得任意i≥0,xy i z∈A。这是正则语言的性质,基于此性质并利用反证法可证明一个语言不是正则语言,这时需要验证满足“|y|>0、|xy|≤p”的每种可能分解方式,都不满足“任意i≥0,xy i z∈A”。 6、非确定型下推自动机PDA接受w=w1w2…w m,是指存在状态序列r0,r1,…,r m,栈字字符串序列s0,s1,…,s m∈Γ*,满足:(1)r0=q0,s0=ε;(2)(r i+1,b)∈δ(r i,w i+1,a),其中s i=at(此时a 为栈顶元素),s i+1=bt(b为当前动作后的栈顶元素);(3)r m∈F,s m=ε。 7、Turing机特点:(1)可以从输送带中读出字符,也可以修改输入带中的字符;(2)可沿输入带向右移动直到遇到字符串结束标志为止,也可从右向左移动直到遇到左端标志为止;(3)可以边读写边移动读写头,也可以不读写而单纯移动;(4)如果进入了“接受”状态则停机(不必消耗所有字符),如果进入了“拒绝”状态也停机,否则一直运行,永不停机。 8、图灵机的形式定义是7元组(Q,∑,Γ,δ,q0,q accept,q reject),其中:(1)Q为状态集;(2)∑为输入字母表,不包括空白符号;(3)Γ为带字母表,包括∑与空格;(4)δ:Q?Γ→Q?Γ?{L,R},转换函数,第1个自变量的取值范围是Q,第2个自变量的取值范围是Γ,其值域是一个三元组,第一个分量表示下一个状态,第二个分量表示写入到输入带上的字符,第三个分量表示下一步的位置;(5)q0∈Q是初始状态;(6)q accept∈Q是接受状态;(7)q reject∈Q拒绝状态,且q reject≠q accept。 9、图灵机M接受字符串w,是指存在一系列的格局C1,C2,…,C k,使得:(1)C1是M 在输入w的起始格局,即C1=q0w;(2)每个C i确定地产生C i+1;(3)Ck是接受格局,即从起始格局起,经过有限步后可达到接受格局。 二、简述题 1、每个多带图灵机等价于某台单带图灵机。请参考下图陈述单带图灵机描述多带图灵机的的细节。多带图灵机为M,待的单带图灵机记为S。
交通流元胞自动机模型综述
第23卷 第1期2006年1月 公 路 交 通 科 技 Journal of Highway and Transportation Research and Development Vol .23 No .1 Jan .2006 文章编号:1002-0268(2006)01-0110-05 收稿日期:2004-09-27 作者简介:郑英力(1971-),女,福建宁德人,讲师,研究方向为交通控制与仿真.(z hengyl71@s ina .com ) 交通流元胞自动机模型综述 郑英力,翟润平,马社强 (中国人民公安大学 交通管理工程系,北京 102623) 摘要:随着交通流模拟的需要及智能交通系统的发展,出现了基于元胞自动机理论的交通流模型。交通流元胞自动机模型由一系列车辆运动应遵守的运动规则和交通规则组成,并且包含驾驶行为、外界干扰等随机变化规则。文章介绍了交通流元胞自动机模型的产生与发展,总结和评述了国内外各种元胞自动机模型,并对元胞自动机模型的发展提出展望。 关键词:元胞自动机;交通流;微观模拟;模型中图分类号:U491.1+23 文献标识码:A Survey of Cellular Automata Model of Traffic Flow ZH ENG Ying -li ,ZH AI Run -p ing ,MA She -q iang (Department of Traffic Management Engineering ,Chinese People 's Public Security University ,Beijing 102623,China )Abstract :With the increas ing demand of traffic flow si mulation and the development of ITS research ,the traffic flow model based on cellular automata has been developed .Cellular automata model of traffic flow incorporates a series of vehicle movement rules and traffic regulations .Meanwhile ,the model works under some stochastic rules takin g into consideration of drivers 'behaviors and ambient interfer -ences .This paper introduces the establishment and development of cellular automata model of traffic flow ,su mmarizes and comments on different kinds of typical cellular automata models of traffic flow ,and furthermore ,presents a new perspective for further stud y of the model . Key words :Cellular automata ;Traffic flow ;Microscopic simulation ;Model 0 引言 交通流理论是运用物理学和数学定律来描述交通特性的理论。经典的交通流模型主要有概率统计模 型、车辆跟驰模型、流体动力学模型、车辆排队模型等 [1] 。20世纪90年代,随着交通流模拟的需要及智 能交通系统的发展,人们开始尝试将物理学中的元胞自动机(Cellular Automata ,简称CA )理论应用到交通领域,出现了交通流元胞自动机模型。 交通流C A 模型的主要优点是:(1)模型简单,特别易于在计算机上实现。在建立模型时,将路段分 为若干个长度为L 的元胞,一个元胞对应一辆或几辆汽车,或是几个元胞对应一辆汽车,每个元胞的状态或空或是其容纳车辆的速度,每辆车都同时按照所建立的规则运动。这些规则由车辆运动应遵守的运动规则和交通规则组成,并且包含驾驶行为、外界干扰等随机变化规则。(2)能够再现各种复杂的交通现象,反映交通流特性。在模拟过程中人们通过考察元胞状态的变化,不仅可以得到每一辆车在任意时刻的速度、位移以及车头时距等参数,描述交通流的微观特性,还可以得到平均速度、密度、流量等参数,呈现交通流的宏观特性。
关于元胞自动机在交通流理论方面的应用
关于元胞自动机在交通流理论方面的应用 一.概念阐述 1. 元胞自动机 定义:一种利用简单编码与仿细胞繁殖机制的非数值算法空间分析模式。 不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规则构成。凡是满足这些规则的模型都可以算作是元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说是一个方法框架。其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间和空间上都是局部的。 2. 交通流理论 定义:是运用数学和物理学的定义来描述交通流特性的一门边缘科学。 它以分析的方法阐述交通现象及其机理,探讨人和车在单独或成列运行中 的动态规律及人流或车流流量、流速和密度之间的变化关系,以求在交通规划、设计和管理中达到协调和提高各种交通设施使用效果的目的。 二.正文 1. 初等元胞自动机: 元胞自动机应用广泛,利用元胞自动机模拟交通流是可行的,比如说利用初等 元胞自动机来模拟交通流,首先要建立元胞自动机模型,建立如下: 考虑有等长的L 个格子的线段 每一个格子i 都有两种状态0和1,在t 时刻i 格子的状态记为:X i t 任意一个格子的下一时刻状态与其当前及前后的格子状态有关,故: 记:X i t+1=F(X i-1t ,X i t ,X i+1t ) 因为t 时刻格子的状态决定了t+1时刻的格子状态,故F 总共有256种定制规 则,为了满足交通规则的需要,我们在这里定制一种称为184的交通流模型。 首个格子与末尾的格子相连,整个线段构成环状。 184交通流模型:每个元胞只有在前进方向的元胞邻居状态无车辆时才前进一 个元胞(位移),即前面有车就不能走。那么对应八种邻居为: 111 110 101 100 ↓ ↓ ↓ ↓ 1 0 1 1 011 010 001 000 ↓ ↓ ↓ ↓ 1 10111000——184
计算理论2013 12题
一.填空题 1.语言类P 、PSPACE 、NP 、NPSPACE 、EXPTIME 之间的关系为 (EXPTIME NPSPACE PSPACE NP P ?=??)。 2.产生语言{12n 03n |n ≥0}的上下文无关文法是(00011|A A ε→)。 3.命题“利用递归定理,一个TM M 可以得到自己的描述
元胞自动机与Matlab
元胞自动机与MATLAB 引言 元胞自动机(CA)是一种用来仿真局部规则和局部联系的方法。典型的元胞自动机是定义在网格上的,每一个点上的网格代表一个元胞与一种有限的状态。变化规则适用于每一个元胞并且同时进行。典型的变化规则,决定于元胞的状态,以及其(4或8 )邻居的状态。元胞自动机已被应用于物理模拟,生物模拟等领域。本文就一些有趣的规则,考虑如何编写有效的MATLAB的程序来实现这些元胞自动机。 MATLAB的编程考虑 元胞自动机需要考虑到下列因素,下面分别说明如何用MATLAB实现这些部分。并以Conway的生命游戏机的程序为例,说明怎样实现一个元胞自动机。 ●矩阵和图像可以相互转化,所以矩阵的显示是可以真接实现的。如果矩阵 cells的所有元素只包含两种状态且矩阵Z含有零,那么用image函数来显示cat命令建的RGB图像,并且能够返回句柄。 imh = image(cat(3,cells,z,z)); set(imh, 'erasemode', 'none') axis equal axis tight ●矩阵和图像可以相互转化,所以初始条件可以是矩阵,也可以是图形。以下 代码生成一个零矩阵,初始化元胞状态为零,然后使得中心十字形的元胞状态= 1。 z = zeros(n,n); cells = z; cells(n/2,.25*n:.75*n) = 1; cells(.25*n:.75*n,n/2) = 1; ●Matlab的代码应尽量简洁以减小运算量。以下程序计算了最近邻居总和,并 按照CA规则进行了计算。本段Matlab代码非常灵活的表示了相邻邻居。 x = 2:n-1; y = 2:n-1; sum(x,y) = cells(x,y-1) + cells(x,y+1) + ... cells(x-1, y) + cells(x+1,y) + ... cells(x-1,y-1) + cells(x-1,y+1) + ... cells(x+1,y-1) + cells(x+1,y+1); cells = (sum==3) | (sum==2 & cells); ●加入一个简单的图形用户界面是很容易的。在下面这个例子中,应用了三个 按钮和一个文本框。三个按钮,作用分别是运行,停止,程序退出按钮。文框是用来显示的仿真运算的次数。
计算理论知识点
1.如果一个语言被有穷自动机识别,则这个语 言是正则语言。 2.正则语言在并运算、连结、星号运算下封闭 3.每一台非确定有穷自动机都等价与一台确 定型有穷自动机。 4.一个语言是正则的当且仅当有一台非确定 型有穷自动机识别。 5.空集连接到任何集合上得到空集,空串连接 到任何一个串上不改变这个字符串。 6.一个语言是正则的,当且仅当有一个正则表 达式描述。 7.如果一个语言是正则的,则可以用正则表达 式描述它。 8.任何一个上下文无关语言都可以用乔姆斯 基范式的上下文无关文法产生。 9.一个语言是上下文无关的当且仅当存在一 台下推自动机识别它。 10.如果一个语言被下推自动机识别,则它是上 下文无关的。 11.每一个正则语言都是上下文无关的。 1.格局——图灵机计算过程中,当前状态、当 前带内容和读写头当前的位置组合在一起, 称为图灵机的格局。 2.图灵可识别(递归可枚举语言)——如果一 个语言可能被某一图灵机识别,则称该语言 是图灵可识别的。 3.图灵可判定(递归语言)——如果一个语言 能被某一图灵机判定,则称它是一个图灵可 判定的。 ——在输入上运行一个TM时,可能出现三种结果:接受、拒绝或者循环。这里循环仅仅指机器不停机,而不一定是这个词所指的那样,永远以同样的方式重复同样的步骤。 ——图灵机有两种方式不接受:一种是它进入拒绝状态而拒绝它,另一种是进入循环。 4.判定器——有时候很难区分进入循环还是 需要耗费很长时间的运行,因此,我们更喜 欢讨论所有输入都停机的图灵机,他们永远 不循环,这种机器称为判定器。他们总是能 决定接受还是拒绝,也称识别某个语言的判 定器判定该语言。 5.每一个可判定语言都是图灵可识别的。 6.每一个多带图灵机等价于一个单带图灵机。 7.非确定型图灵机都等价于一个确定型图灵 机。8.如果一个语言是图灵可识别的,当且仅当存 在非确定型图灵机识别它。 9.一个语言是图灵可判定的,当且仅当存在非 确定型图灵机判定它。 10.丘奇图灵论题——算法的明确定义。 11.详细描述图灵机的术语——①形式化描述, 详尽的写出图灵机的状态、转移函数,这是 最底层次的、最详细程度的描述。②描述水 平要高一些,称为实现描述,使用日常用语 来描述图灵机,没有给出状态和转移函数③ 高水平描述,他也是使用日常用语来描述算 法,忽略了实现模型不需要提及图灵机怎样 管理它的带子和读写头。 12.A DFA(确定型有穷自动机)、A NFA(非确定 型有穷自动机)、A REX(正则表达式)、 E DFA(判Φ的确定型有穷自动机)、EQ DFA(两 个判别同一个语言的DFA)、 A CFG(上下文无关文法)、ECFG(判Φ上下文 无关文法)、 A LBA(线性界限自动机)、是一个可判定语言 每一个上下文无关语言是可判定的。 A TM(图灵机)、停机问题、HALT TM(一个图 灵机对于给定的输入是否停机)、E TM(不接受任 何语言图灵机)、REGULAR TM(正则图灵机)、 EQ TM(接受串相等的图灵机)、 E LBA(不接受语言的线性界限自动机)、 ALL CFG、PCP(波斯地图对应实例)是不可判定 的。 A TM(补)是不可识别的。 13.一个语言的补是由不在此语言中的所有串 构成的语言。如果一个语言的补集是图灵可 识别的语言,则称它是补图灵可识别的。 14.一个语言是可判定的,当且仅当它既是图灵 可识别的,也是补图灵可识别的。 15.设M是一个图灵机,w是一个串。M在w 上的一个接受计算历史(accepting computation history)是一个格局序列C1、 C2、……、C l,其中C1是M在w上的起始 格局,C l是M的一个接受格局,且每个C i 都是C i-1的结果,即符合M规则。M在w 上的一个拒绝计算历史可类似定义。只是 C l是一个拒绝格局。 16.计算历史都是有限序列。如果M在w上永 不停机,则在M上既没有接受历史,也没 有拒绝计算历史存在。确定型机器在任何给 定的输入上最多只有一个计算历史。非确定 型机器即使在单个输入上都有多个计算历 史,他们与各个分支相对应。 17.线性有穷自动机是一种受到限制的图灵机, 它不允许其读写头离开包含输入带的区域。 如果此机器试图将它的读写头离开输入的 两个端点,则读写头就在原地保持不动。这 与普通的图灵机读写头不会离开带子的左 端点方式一样。 18.讲一个问题归约为另一个问题的概念可以 用多种方式来定义,选择哪种方式要根据具 体应用的情况。我们选择一种简单方式的可 归约性,叫做映射可归约性。 19.用映射可归约性把问题A归约为问题B指 的是:存在一个可计算函数,他将问题A 的实例转换成问题B的实例。如果有了这样 一个转换函数(称为归约),就能用B的解 决方案来解决A。 20.函数f:∑*→∑*是一个可计算函数,如果 有某个图灵机M,使得每个输入w上M停 机,且此时只有f(w)出现在带上。 21.语言A是映射可归约到语言B的,如果存在 可计算函数f:∑*→∑*使得对每个w w∈A<=>f(w)∈B 22.记做A≤mB,称作函数f为A到B的归约。 如果A≤mB且A是不可判定的,则B也是不 可判定的。 如果A≤mB且B是图灵可识别的,则A也是 图灵可识别的 23.EQ TM既不是图灵可识别的,也不是补图灵 可识别的。 24.令t:N→R+是一个函数,定义时间复杂 性类TIME(t(n))为由时间O(t(n))的图灵机可 判定的所有语言的集合。 25.t(n)是一个函数,t(n)≥n。则每一个多带图 灵机都和某一个O(t2(n))时间的单带图灵机 等价。 26.t(n)是一个函数,t(n)≥n。则每一个t(n)时间 的非确定型单带图灵机都与某一个2O(t(n))时 间的确定型单带图灵机等价。 27.P类是一个语言类,该类在多项式时间内可 判定。 28.PATH∈P、RELPRIME∈P、每一个上下文 无关文法都是P 29.一个语言在NP中,当且仅当它能被某个非 确定型多项式时间的图灵机判定。 30.{HAMPATH, CLQUE, SUBSET-SUM, SAT, 3SAT, UHAMPATH, }∈NP 31.P=成员可以快速判定的语言类 NP=成员可以快速验证的语言类 32.若存在多项式时间图灵机M,使得在任何输 入w上,M停机时f(w)恰好在带上,函数f: ∑*→∑*是一个多项式时间可计算函数。 33.语言A称作多项式时间映射可归约到语言 B,或者简称为多项式时间可归约到B,记 为A≤pB,若存在多项式时间可计算函数 f:∑*→∑*,对于每一个w,有 w∈A<=>f(w)∈B 函数f称为A到B的多项式时间归约。 34.列文-库克定理 SAT∈P,当且仅当P=NP 35.3SAT多项式时间可归约到CLIQUE。 36.令f:N→R+是一个函数。空间复杂性类和 NSPACE(f(n))定义如下: SPACE(f(n))={L|L是被O(f(n))空间的确定型 图灵机判定的语言} NSPACE(f(n))={L|L是被O(f(n))空间的非确定 型图灵机判定的语言} 37.萨维奇定理
元胞自动机NaSch模型及其MATLAB代码
元胞自动机N a S c h模型 及其M A T L A B代码 This manuscript was revised by the office on December 22, 2012
元胞自动机N a S c h模型及其M A T L A B代码 作业要求 根据前面的介绍,对NaSch模型编程并进行数值模拟: 模型参数取值:Lroad=1000,p=0.3,Vmax=5。 边界条件:周期性边界。 数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。 基本图(流量-密度关系):需整个密度范围内的。 时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致,画500个时间步即可)。 指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。 流量计算方法: 密度=车辆数/路长; 流量flux=density×V_ave。 在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N; 流量flux=N/T。 在计算过程中可都使用无量纲的变量。 1、NaSch模型的介绍 作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。 时间、空间和车辆速度都被整数离散化。道路被划分为等距离的离散的格子,即元胞。 每个元胞或者是空的,或者被一辆车所占据。 车辆的速度可以在(0~Vmax)之间取值。 2、NaSch模型运行规则 在时刻t到时刻t+1的过程中按照下面的规则进行更新: (1)加速:vnmin(vn1,vmax) 规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。 (2)减速:vnmin(vn,dn) 规则(2)确保车辆不会与前车发生碰撞。 (3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0) 规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。这一规则也是堵塞自发产生的至关重要因素。 (4)位置更新:vnxnvn,车辆按照更新后的速度向前运动。其中vn,xn分别表示第n辆车位置和速度;l(l≥1)为车辆长度; p表示随机慢化概率;dnxn1xn1表示n车和前车n+1之间空的元胞数; vmax为最大速度。 3、NaSch模型实例
计算理论习题解答
计算理论习题解答 练习 1.1图给出两台DFA M i和M2的状态图?回答下述有关问题? a. M 1的起始状态是q1 b. M1的接受状态集是{q2} c. M2的起始状态是q1 d. M2的接受状态集是{ q1, q4) e. 对输入aabb,M1经过的状态序列是q1, q2, q3, q1, q1 f. M 1接受字符串aabb吗?否 g. M 2接受字符串£吗?是 1.2给出练习 2.1中画出的机器M1和M2的形式描述 M 1=(Q 1,2,3 1,q1,F1)其中 1) Q1={q 1,q2,q3,}; 2) 2 ={a,b}; 3) 3 1 为: a b q1q2 q1 q2q3 q3 q3q2 q1 4) q1 5) F1={q 2} M2=(Q2,2,3 2,q2,F2)其中 1) Q2={q 1,q2,q3,q4}; 2) 2 ={a,b}; 3) 3 2为: a b q1q1 q2 q2q3 q4 q3q2 q1 q4q3 q4 3) q2是起始状态 4) F2={q 1,q4} 1.3 DFA M 的形式描述为({q1, q2, q3, q4, 机器的 q5}, {u,d}, 3 ,q3, {q3}),其中3在表2-3中给出。试画出此状态图。
1.6画出识别下述语言的DFA的状态图。 a){w | w从1开始以0结束} c) {w | w含有子串0101} 彳 c n 1 d) {w | w的长度不小于3,且第三个符号为0} 0,1
,1 g) {w | w 的长度不超过 5} 0,1 0,1 0,1 h){w | w i){w | w 的奇位置均为1} k) { 2} 斗「0,1 1 I) {w | w 含有偶数个0,或恰好两个1} 1 - 1 . 1 0 0 0 1 m)空集 _ 0,1 n)除空串外的所有字符串 1.7给出识别下述语言的 NFA ,且要求符合规定的状态数。
传染病模型的元胞自动机实现(附程序)
传染病模型的元胞自动机实现 clc;clear all;close all; TT0=[];TT1=[];TT2=[];TT3=[];TT4=[];TT5=[];TT6=[]; %========构建元胞网络============ n=100; %网格规模 L=73; %仿真天数,365/5=73 %=============参数设定=========== p1=0.001; %0-1(易感者-潜伏者) yita=0.001; %5-0(治愈着-易感者) Step=10; %迁移步长 m=0.1; %迁移比例 popu=round(m*n); %每次迁移的人数round(X)朝最近的方向取整,对X中的每个元素朝最近的方向取整 T1=1.4; %1-3(潜伏者-隔离者时间步长)? T2=2; %2-3(染病着-隔离者时间步长) ? T3=3; %隔离时间步长 T4=73; %免疫时间步长 T5=15; %接种疫苗时间步长(10-14天表现出症状) ?
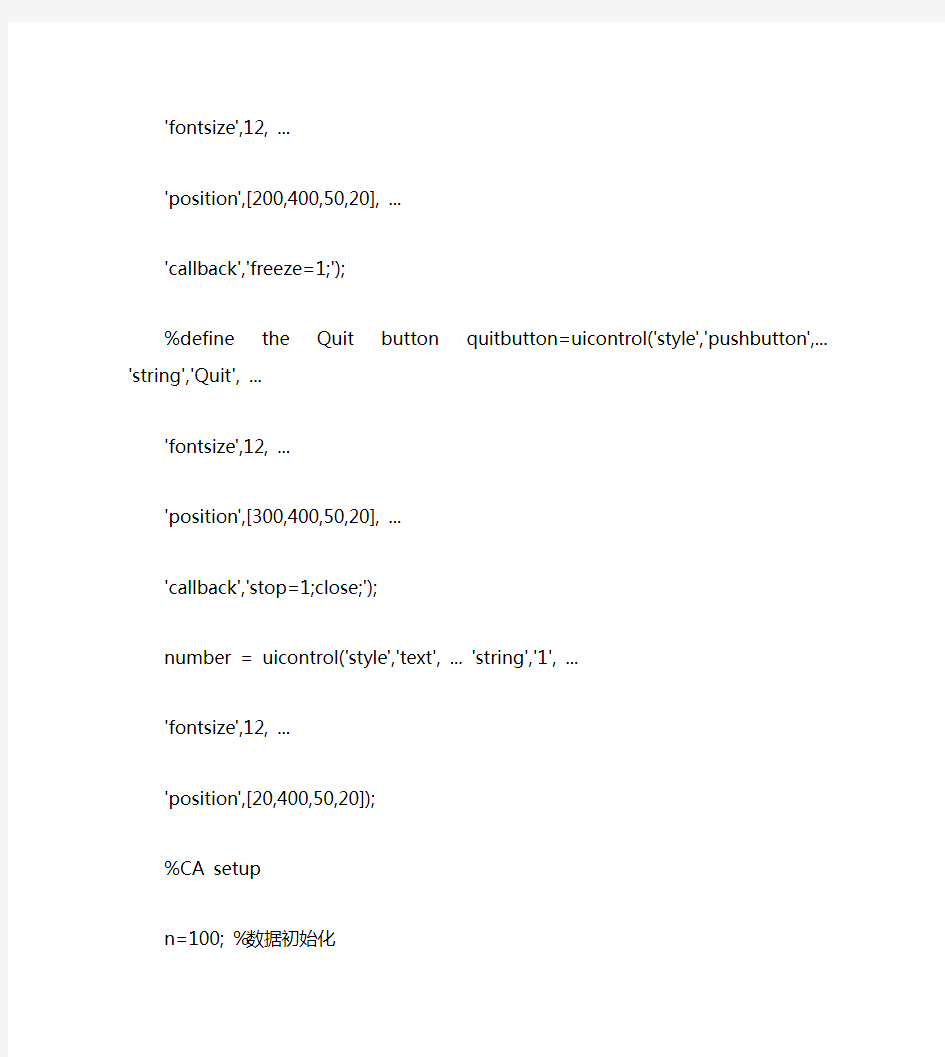
q1=0.3; %潜伏者强制隔离阀值? q2=0.5; %染病着强制隔离阀值? q3=0.6; %隔离者强制治愈阀值 q4=0.9; %接种疫苗力度? q5=0.9; %6-5(接疫苗者-治愈者) q6=0.5; %1-2 q7=0.8; %5-0 lambda1=0.01075; %患者的死亡概率 lambda2=0.00525; %隔离者的死亡概率 %% 初始化元胞 people=zeros(n); %初始化人群 people(rand(n) 元胞自动机N a S c h模型及其M A T L A B代码 标准化管理部编码-[99968T-6889628-J68568-1689N] 元胞自动机N a S c h模型及其M A T L A B代码 作业要求 根据前面的介绍,对NaSch模型编程并进行数值模拟: 模型参数取值:Lroad=1000,p=0.3,Vmax=5。 边界条件:周期性边界。 数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。 基本图(流量-密度关系):需整个密度范围内的。 时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致,画500个时间步即可)。 指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。 流量计算方法: 密度=车辆数/路长; 流量flux=density×V_ave。 在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N; 流量flux=N/T。 在计算过程中可都使用无量纲的变量。 1、NaSch模型的介绍 作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。 时间、空间和车辆速度都被整数离散化。道路被划分为等距离的离散的格子,即元胞。 每个元胞或者是空的,或者被一辆车所占据。 车辆的速度可以在(0~Vmax)之间取值。 2、NaSch模型运行规则 在时刻t到时刻t+1的过程中按照下面的规则进行更新: (1)加速:vnmin(vn1,vmax) 规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。 (2)减速:vnmin(vn,dn) 规则(2)确保车辆不会与前车发生碰撞。 (3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0) 规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。这一规则也是堵塞自发产生的至关重要因素。 (4)位置更新:vnxnvn,车辆按照更新后的速度向前运动。其中vn,xn分别表示第n辆车位置和速度;l(l≥1)为车辆长度; p表示随机慢化概率;dnxn1xn1表示n车和前车n+1之间空的元胞数; vmax为最大速度。 3、NaSch模型实例 元胞自动机-城市规划 城市规模设计 雄安新区占地总面积约为2000平方公里,涉及河北省雄县、容城、安新3个县及周边部分区域,地处北京、天津、保定腹地,通过ArcGIS地图软件搜索该区域并从中提取出来,区域图如下所示。 图5 雄安新区区域图 为对雄安新区进行更好的仿真模拟,首先先在地图中截取雄安新区地图,然后进行边缘轮廓提取和白洋淀等不可开发地区的剔除,获得预处理图像。最后用MATlAB进行图像灰度化、二值化处理如下图所示。为后续元胞自动机提供演变地图。 图6 Matlab识别图 城市规划CA模型总步骤: 1: Step首先确定其组成的主要元素:元胞、元胞空间、元胞状态、元胞邻域及转变规则 2: Step分析模拟城市空间结构; 3:Step 确定模型的参数:繁殖参数、扩散参数、传播参数及受规划约束参数 4:Step 确定模型所需元胞转换规则的定义 5:Step 进行城市发展模拟。 ①本文提取的雄安新区地图像素为135109m m ?,元胞空间定义为11m m ?;元胞状态对应的是该地的四种状态:未城市化(即对应能开发还未开发的区域),城市化,扩展中心城市,不能被开发(如白洋淀等区域)。土地状态用编码表示。 ②元胞邻域选取为on V Neumann 邻居,在CA 系统中一个元胞1t +时刻的状态取决于它t 时刻与它邻域内其他元胞状态,考虑到地区之间发展限制因素较多,所以选取邻域较少的Neumann V on 邻居型[7]。 on V Neumann 邻居型数学定义为: ()(){} 20,,1|||||,Z v v v v v v v v v N iy ix oy iy x ix iy ix i ∈≤-+-== (4.18) 式(18)中i v 、y v 为中心元胞邻居元胞的行列坐标值,ax v 、oy v 为中心元胞的行列坐标值。 ③模型参数 借鉴参考文献[7]中的CA 模型设置了以下几个主要参数来描述城市发展[7]。 1.扩散参数diffusion :在自然增长规则下,扩散参数可以表示一个城市化单元格元胞可能转换成另一个城市化单元格元胞的次数 2.繁殖参数breed :在新中心传播增长规则中,繁殖参数用于一个城市化元胞可能转变成为一个新的中心传播城市化元胞 3.传播参数spread :在边界增长的规则下,用于一个扩散中心的已城市化的邻居元胞转变为城市化的可能性 4.规划系数参数onst int C ra :城市规划是城市工程建设和城市管理中基本依据之一,规划系数的变化对规划区最终达成的效果有约束作用[7] 模型转换规则: ④元胞的转换规则是指元胞状态的演化过程的法则,当前中心元胞和邻居元胞所处的状态决定下一个时刻贵中心状态的动力学函数,即一个状态转移函数[7]。 ()11 :,t t t i i n f s f s s ++= (4.19) 式(4.19)中t i s 表示中心元胞i 在t 时刻的状态,t n s 为t 时刻的邻居状态的组 合,1t i s +为中心元胞i 在1t +时刻所处的状态,f 为映射函数,即为元胞局部运动规则[7]。 ⑤在传统的CA 模型转换规则上进行扩展,规则为:边界增长规则、自然增长规则、新扩展中心型增长规则及受规划系数影响增长规则[7]。 1.边界增长规则:原有城市元胞边缘一定区域内,随着城市化发展,城市向外扩展,生成一个新的城市化元胞,体现了城市发展的集聚效应[7]。规定对于元胞自动机NaSch模型及其MATLAB代码精修订
城市规划-元胞自动机