南方平查易导线实例
导线实例
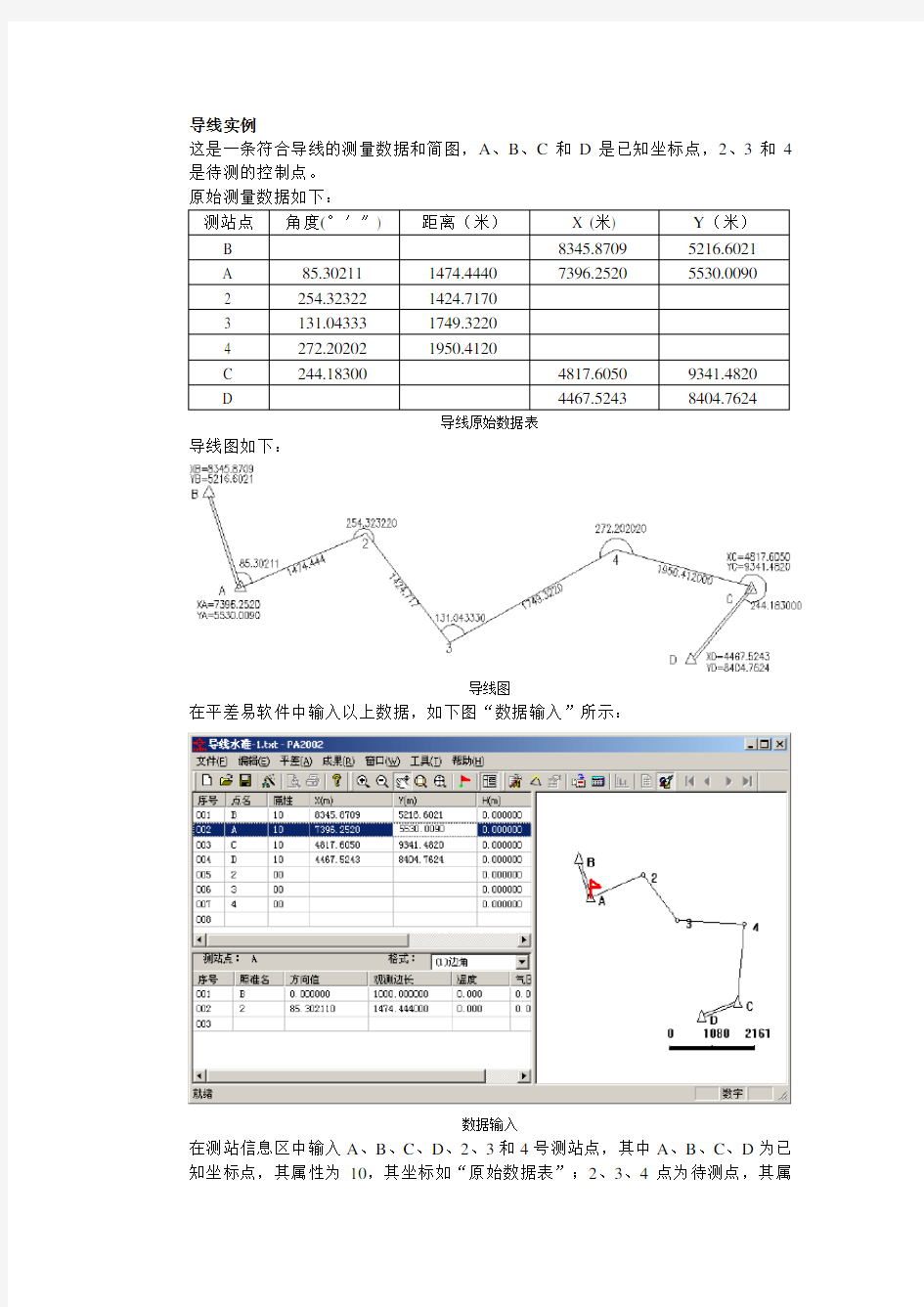
这是一条符合导线的测量数据和简图,A、B、C和D是已知坐标点,2、3和4是待测的控制点。
导线原始数据表
导线图如下:
导线图
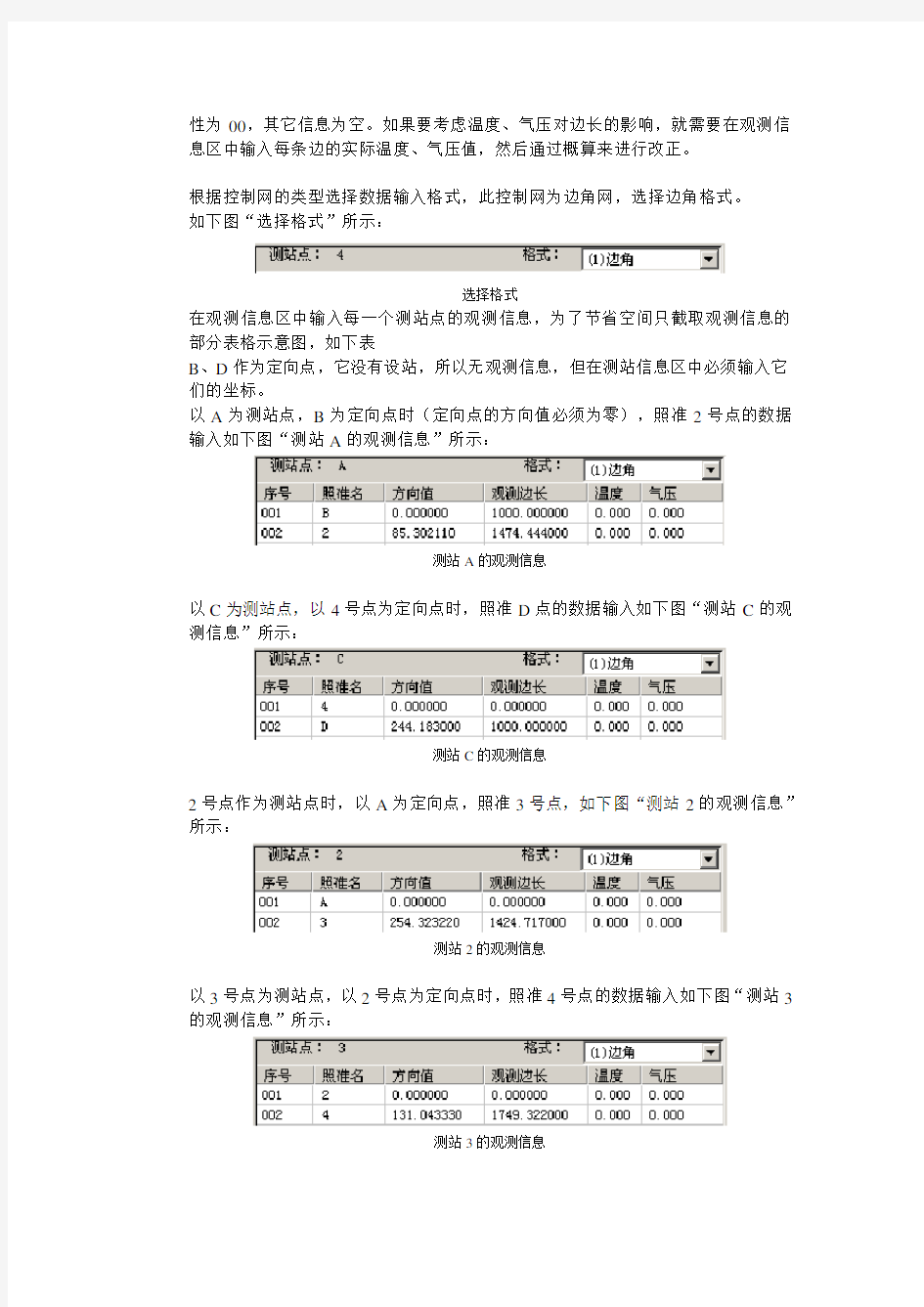
在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入
在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属
性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。
根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。
如下图“选择格式”所示:
选择格式
在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表
B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。
以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示:
测站A的观测信息
以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示:
测站C的观测信息
2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示:
测站2的观测信息
以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示:
测站3的观测信息
以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:
测站4的观测信息
说明:①数据为空或前面已输入过时可以不输入(对向观测例外)
②在电子表格中输入数据时,所有零值可以省略不输。
以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A):
[STATION] (测站信息)
B,10,8345.870900,5216.602100
A,10,7396.252000,5530.009000
C,10,4817.605000,9341.482000
D,10,4467.524300,8404.762400
2,00
3,00
4,00
[OBSER] (观测信息)
A,B,,1000.0000
A,2,85.302110,1474.4440
C,4
C,D,244.183000,1000.0000
2,A
2,3,254.323220,1424.7170
3,2
3,4,131.043330,1749.3220
4,3
4,C,272.202020,1950.4120
上面[STATION](测站点)是测站信息区中的数据,[OBSER](照准点)是观测信息区中的数据。
南方平查易闭合差计算
闭合差计算与检核 根据观测值和“计算方案”中的设定参数来计算控制网的闭合差和限差,从而来检查控制网的角度闭合差或高差闭合差是否超限,同时检查分析观测粗差或误差。点击“平差\闭合差计算”,如下图“闭合差计算”所示: 闭合差计算 左边的闭合差计算结果与右边的控制网图是动态相连的(右图中用红色表示闭合导线或中点多边形),它将数和图有机的结合在一起,使计算更加直观、检测更加方便。 “闭合差”:表示该导线或导线网的观测角度闭合差。 “权倒数”:即是导线测角的个数。 “限差”:其值为权倒数开方×限差倍数×单位权中误差(平面网为测角中误差)。对导线网, 闭合差信息区包括fx,、fy、fd、K、最大边长, 平均边长以及角度闭合差等信息。若为无定向导线则无fx,、fy、fd,、K等项。闭合导线中若边长或角度输入不全也没有fx、fy、fd,、K等项。 在闭合差计算过程中“序号”前面“!”表示该导线或网的闭合差超限,“ ”表示该导线或网的闭合差合格。“X”则表示该导线没有闭合差。 此实例数据的角度闭合差和高差闭合差都合格。 在平差易的闭合差计算中提供了粗差检测报告。
具体操作: 第一步:打开数据文件并计算该导线或导线网的闭合差。 第二步:点击某条闭合差的计算记录,显示出该闭合差的详细信息。(该粗差检测只针对导线或导线网而言,并且必须有该闭合差的详细信息。) 第三步:在闭合差信息区内点击鼠标的右键,即可显示“平面查错”和“闭合差信息”两个选项。 第四步:点击“平面查错”项即可显示“平面角度、边长查错信息”。 角检系数:指闭合导线或附合导线在往返推算时点位的偏移量。偏移量越小该点的粗差越大,偏移量越大该点的粗差越小。 边检系数:指闭合导线或附合导线的全长闭合差的坐标方位角与各条导线方位角的差值。差值越小该点的粗差越大,差值越大该点的粗差越小。 注意: A、在角度闭合差没有超限时才进行边长检查。 B、当只存在一个角度或一条边长粗差时才能进行平面查错,当存在两个或两个以上的粗差时它的检测结果就不十分准确。 C、如各检测系数相同或相差不大时闭合导线或附合导线就没有粗差。 [闭合差统计表] ========================================== 序号:<1> 几何条件:附合导线 路径:D-C-4-3-2-A-B 角度闭合差=3.90,限差=±11.18fx=0.014(m),fy=0.008(m),fd=0.016(m) [s]=6598.947(m),k=1/409531,平均边长=1649.737(m) ================================================== 序号:<2> 几何条件:三角高程 路径:C-4-3-2-A 高差闭合差=-28.67(mm),限差=±50 X SQRT(11.068)=±166.34(mm) (统计表详细格式内容见附录A)
闭合导线平差计算步骤
闭合导线平差计算步骤: 1、绘制计算草图。在图上填写已知数据和观测数据。 2、角度闭合差的计算与调整 (1)计算闭合差: (2)计算限差:(图根级) (3)若在限差内,则按平均分配原则,计算改正数: (4)计算改正后新的角值: 3、按新的角值,推算各边坐标方位角。 4、按坐标正算公式,计算各边坐标增量。 5、坐标增量闭合差的计算与调整 (1)计算坐标增量闭合差。有: 导线全长闭合差: 导线全长相对闭合差: (2)分配坐标增量闭合差 若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。并计算改正后的坐标增量。
6、坐标计算 根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。 [ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。 计算表格见下图:
闭合水准路线内业计算的步骤: (1) 填写观测数据 (2) 计算高差闭合差 h f =∑h ,若h f ≤容h f 时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。 (3) 调整高差闭合差 各段高差改正数: i h i i h i L L f V n n f V ·· ∑-= ∑-= 或 各段改正高差: i i i V h h +=改 (4) 计算待定点的高程 闭合差(fh ) 水准路线中各点间高差的代数和应等于两已知水准点间的高差。若不等两者之差称为闭合差 高差闭合差的计算 .支水准路线闭合差的计算方法 .附合水准路线闭合差的计算方法 .闭合水准路线闭合差的计算方法 高差闭合差容许值 (n 为测站数,适合山地) (L 为测段长度,以公里为单位,适合平地) 水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差
导线平差计算
导线平差计算 1 简介 闭合导线和附合导线是长输管道站场和穿跨越测量常用的控制手段,其优点是可以同时完成平面和高程控制测量。导线平差原理请查阅相关文献。不同平差软件的平差方法步骤基本相同,本文件基于南方平差易软件平台介绍导线(闭合导线、附合导线是最简单的导线控制网)平差的操作方法。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。 《长距离输油输气管道测量规范》(SY/T 0055-2003) 《工程测量规范》(GB 50026-2007) 3 操作步骤 (1)录入数据 录入数据是将导线测量数据录入平差软件。可以采用手工或文件方式录入(建议采用后者,选菜单“文件/打开”)。其数据格式如下: [NET] 控制网信息 [PARA] 控制网参数 [STATION]坐标和高程信息(11表示高程已知,如果无坐标则无法在平差易中看到和输出地图)[OBSER] 观测的转角、平距、高差等信息 下图为导入数据窗口: 图3-1 导入数据窗口 (2)坐标推算(F3)
选菜单“平差/推算坐标”,根据已知条件(测站点信息和观测信息)推算出待测点的近似坐标。为构建动态网图和导线平差作基础。 (3)概算 选菜单“平差/选择概算”→配置概算参数→输出概算结果。下图为“选择概算”的配置参数窗口: 图3-2 配置概算参数 (4)调整观测数据 将概算结果调整到输入的观测数据中,重新导入。 (5)计算方案的选择 对于同时包含了平面数据和高程数据的导线, 一般处理过程应为:先进行平面处理, 然后在高程处理时软件会使用已经较为准确的平面数据(如距离等)来处理高程数据。对精度要求很高的平面高程混合平差,您也可以在平面和高程处理间多次切换,迭代出精确的结果(但建议平面和高程分开了平差)。 针对导线平差,需要设置中误差及仪器参数、高程平差参数、限差及等级内容。 选菜单“平差/平差方案”即可进行参数的设置,如下图:
导线平差中的一些问题
导线测量平差常见问答 一、为何有时计算结果与其它计算有些差异? 答:a.观测角度使用的是前进方向的左角还是右角,本软件采用前进方向的左角,输入负号时表示是前进方向的右角,并转换为左角平差。 b.是否选用了概算,及概算的各选项是否正确。 c.是否使用严密平差,严密平差与近似平差计算结果是不同的。 d.严密平差是否使用迭代平差,有些软件尽管使用严密平差,但只进行单次平差,精度不高。 e.严密平差的先验误差设置是否一致,是否使用了Helmert验后方差定权,软件使用的定权方式可能不一样,导致部分差异。 f.近似平差是否选用了反算等,可以在“项目设置”中更改以适合您的需要。 g.近似平差时是否选用了角度改正前的坐标增量闭合差,这会导致坐标增量闭合差的不一致。 h.高程平差时,水准和三角高程因为定权的不同而有差异,坐标导线按三角高程计算,其它则提供了高差类型的选择。 二、如何选择严密平差或近似平差?近似平差是否需要进行方位角边长反算? 答: 《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。当采用简化方法平差时,应以平差后坐标反算的角度和边长作为成果。 《城市测量规范》规定:四等以下平面控制网可采用近似平差法和按近似方法评定其精度。......采用近似平差方法的导线网,应根据平差后坐标反算的方位角与边长作为成果。 因此,严密平差适用于各等级导线,而近似平差适用于较低等级导线,采用近似平差时应对方位角、角度、边长等进行反算,以便方位角、边长、角度等可以作为最终成果使用。 三、为什么软件中默认的计算表格样式与我们的习惯不一样? 答:成果表格可以自定义,计算表因方案设置的不同而有所不同。 这里主要是因为您使用的是近似平差且不进行反算的格式,而本软件默认是严密平差,当选择近似平差时默认也是进行反算的。可以在项目设置中选择近似平差,并且去掉“方位角、边长反算”等即可获得您所需的格式。 四、近似平差时的坐标增量闭合差为什么与有些书上不一样? 答:近似平差中,计算方案里有一个选项,以让用户选择近似平差是否使用在角度闭合差分配前计算的坐标增量闭合差来反映导线精度。使用角度闭合差分配前计算的坐标增量闭合差将与严密平差一致,否则与通常的手工计算一致。 五、验后测角中误差有时相对于角度闭合差为何显得很大? 答:这主要有以下情况: a.先验误差设置不切实际,相对于测角,将测距先验误差设置过高会导致程序认为误差主要来源于角度,而对角度加以较大的改正数,使得评定的测角中误差较大。 b.测量发生错误,主要可能是边长测量错误,使得坐标增量闭合差太大。 c.已知点精度不高。 六、为什么角度闭合差不是平均分配的? 答:严密平差是按最小二乘法平差,角度闭合差不是平均分配的。 近似平差角度闭合差是平均分配的,但如果计算方案里选择了进行反算,则角度、方位角、边长等都是反算后的最终成果,并不是计算的中间成果,角度改正数也就可能有正有负。
附合导线平差程序设计报告
《测量平差程序》课程设计 (报告) 学生姓名:罗正材 学号:1108030128 专业:2011级测绘工程 指导教师:肖东升
目录 一、前言 (3) 二、平差程序的基本要求 (3) 三、平差程序模块化 (3)
图1 四、平差中的重要函数 (一)、角度制与弧度制的相互转化 C/C++程序设计中,关于角度的计算以弧度制为单位,而在测量以及具体工作中我们通常习惯以角度制为单位。这样,在数据处理中,经常需要在角度制与弧度制之间进行相互转化。这里,我们利用C/C++数学函数库math.h中的相关函数完成这两种功能。 这里,我们使用double类型数据表示角度制数和弧度制数。例如:123度44分58.445秒,用double类型表示为123.4458445,其中分、秒根据小数位确定。 在角度制与弧度制的转化中,涉及如下图2所示的两个环节。 度.分秒度弧度 图2 1.角度化弧度函数 double d_h(double angle) //角度化弧度 { double a,b; angle=modf(angle,&a);//a为提取的度值(int类型),angle为分秒值(小数) angle=modf(angle*100.0,&b); // b为提取的分值(int类型),angle为秒值(小数) return (a+b/60.0+angle/36.0)*(PI+3.0E-16)/180.0; } 2.弧度化角度函数 double h_d(double angle) //弧度化角度
{ double a,b,c; angle=modf(angle*180.0/(PI-3.0E-16),&a); angle=modf(angle*60.0,&b); angle=modf(angle*60.0,&c); return a+b*0.01+c*0.0001+angle*0.0001; } 其中,函数modf(angle,&a)为C语言数学库函数,返回值有两个,以引用类型定义的a 返回angle的整数部分,函数直接返回值为angle的小数部分。 (二)近似坐标计算 在平面网间接平差计算中,近似坐标计算是非常重要的一项基础工作。近似坐标是否计算成功是间接平差是否可以进行的必要条件。 1.两方向交会 已知条件:两个点的近似坐标,这两个点到未知点的方位角,如图3所示 图3两方向交会 根据图4.2,设 1 1 α tg k=, 2 2 α tg k=,则很容易写出 ? ? ? ? ? ? - = - - = B P B P A P A P y y k x x y y k 2 1 整理该式,得两方向交会的的计算公式 ?? ? ? ? ? - - = ?? ? ? ? ? ?? ? ? ? ? - - B B A A P P y x k y x k y x k k 2 1 2 1 1 1 (4.1)对(4.1)式计算,即可得到未知点的近似坐标。应用中需要注意的是,若两方向值相同或相反,则该式无解。 程序中,定义该问题的函数为:int xy0ang(obser &a1,obser &a2) 2.三边交会 如图4所示,为排除两边长交会的二义性,给出如下三边交会的模型,已知条件:三个
闭合导线平差计算步骤
闭合导线平差计算步骤: 1、绘制计算草图。在图上填写已知数据和观测数据。 2、角度闭合差的计算与调整 Z 鬲-ZAe =(角 + 腐+、,+ 岗)- (〃-2)180°(1)计算闭合差:二 (2)计算限差: @二±4°扁(图根级) (3)若在限差,则按平均分配原则,计算改正数:尸 (4)计算改正后新的角值:禹=小弓 3、按新的角值,推算各边坐标方位角。 4、按坐标正算公式,计算各边坐标增量。 5、坐标增量闭合差的计算与调整 (1)计算坐标增量闭合差。有: 导线全长闭合差:f = 导线全长相对闭合差:# (2)分配坐标增量闭合差 若K< 1/2000 (图根级),则将兀、5以相反符号,按边长成正比分配到各坐标增量上去。并计算改正后的坐标增量。
6、坐标计算 根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。[例题]如图所示闭合导线,试计算各导线点的坐标。 计算表格见下图:
(1)填写观测数据 (2) 计算高差闭合差 fh = £h,若hwh 容 时,说明符合精度要求,可以进行高差 闭合差的调整;否则,将重新进行观测。 (3) 调整高差闭合差 各段高差改正数: V,- 〃 或 y 乙 , XL 1 各段改正高差: 九改=h i + v i (4) 计算待定点的高程 闭合差(fh ) 水准路线中各点间高差的代数和应等于两已知水准点间的高差。若不等两者之差称为闭 合差 高差闭合差的计算 fh = 22/ +2Z 知 .支水准路线闭合差的计算方法(或名= .附合水准路线闭合差的计算方法 九- £编 .闭合水准路线闭合差的计算方法其=£% 高差闭合差容许值 义£±12诚(所0 (n 为测站数,适合山地) 丁磅M±40JZ(*^)(L 为测段长度,以公里为单位,适合平地) 水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差 :
C#附和导线平差程序设计实习报告
前言 随着测绘科学技术的不断发展,在测量数据的处理中产生很多种平差的方法。附和导线近似平差程序是利用C#编程实现的,我们需要将导线网的已知数据信息按照特定的规则输入到.txt文本中,利用C#程序读取文本数据信息后,对其进行一系列的平差计算,最终获得平差后的结果,并以.txt文本的形式输出,这样就可为测量工作提供一定的参考。 平差程序的基本要求 平差程序的设计与其他程序设计相同,应满足一定要求。 1.程序逻辑结构简单,清晰易读,符合结构化程序设计要求,便于拓展; 2.运算速度快,占用内存小,内外存储之间的交换不宜过于频繁; 3.数学模型及计算方法正确且先进,计算结果精度高; 4.适用性强,便于移植,充分考虑各种可能形式,满足不同需求; 5.方便用户,操作简单,输出明了、齐全,人机交互良好。 上述要求,既体现现在平差程序的总体设计中,也贯穿于平差程序设计的各个环节中。 平差程序中的重要函数 (一)角度制与弧度制的相互转化 C#程序设计中,关于角度的计算以弧度制为单位,而在测量工作中我们通常以角度制记录数据。所以,在数据处理中,通常需要在角度制与弧度制之间进行相互转化。这里我们需要利用相关函数完成这两种功能。 1.角度化弧度函数: static public double DEG(double ang) { int fuhao = (int)(ang / Math.Abs(ang)); ang = Math.Abs(ang); int d = (int)ang; int m = ((int)(ang * 100)) - d * 100; double s = ang * 10000 - m * 100 - d * 10000; return ((d + m / 60.0 + s / 3600.0) * fuhao) / 180.0 * Math.PI; } 2.弧度化角度函数: static public double DMS(double ang) { ang += 1.0E-15;//加上一个小量,以保证进位 int fuhao = (int)(ang / Math.Abs(ang));
高差闭合差计算原理及公式
建筑工程测量中高差闭合差的计算与调整 摘 要:在高程控制测量中,可以通过计算高差闭合差来检核观测成果的质量。而高差闭合差这一概念,在建筑工程测量的实际应用中容易混淆。文章从高差闭合差计算、调整和高程计算三个方面入手, 给出了对高差闭合差理解的思路,以及在控制测量中高差闭合差平差的新方法。经实践验证,有益于工作效率的提高。 关键词:水准测量;高差闭合差;平差 0 前言 在建筑工程测量中,当待测点距已知点较远时,必须进行高程控制测量。高程测量的方法有多种,其中水准测量是精确测量地面点高程的主要方法,在实际工作中应用十分广泛。 沿线布设临时水准点,从已知点出发,沿闭合路线、附合路线、支路线等三种路线进行水准测量,三种水准路线的区别见表1。由于支水准路线缺乏检核条件,规定在支水准路线中必须进行往返测量。这样,在三种水准路线中,终点都是已知点。 表1 水准路线的区别 水准路线 起点 终点 起点与终点的位置 备注 闭合水准路线 BM1 BM1 相同 环线 附合水准路线 BM1 BM2 不相同 支水准路线 BM1 BM1 相同 沿原路线返回。如:BM1→1→2→3→4→3→2→1→BM1 由于仪器(工具)误差、观测误差、外界条件的影响等测量误差的存在,在水准测量中不可避免地会出现测量误差。当待测点距已知点较远时,经过多测站的观测后,在待测点上必然积累了一定的误差,这些误差的多少只有通过多余观测才可得知。 多余观测在这里体现为对终点进行观测。用终点的实测高程与终点的理论高程去进行比较,从而得知产生了多少误差,这个误差就是高差闭合差。 对水准测量的成果进行检核,当测量误差在容许范围之内就必须对产生的测量误差,即高差闭合差进行调整,这就是控制测量中的平差。 1 高差闭合差的计算 在相关书目 [1] 中,高差闭合差可以定义为:在控制测量中,实测高差的总和与理论高差的总和之间的差值,表示为∑∑-= 理测 h h f h 。 在外业时,可用该公式检验外业的质量,判断是否结束外业。三种水准路线计算高差闭合差所用的公式如下:
全站仪测量闭合导线如何平差计算出各点坐标
如果你想学习导线(闭合、符合、支导线),我可以传份学习资料给你, 如果要严密平差建议用清华山维测量平差软件 如果简单平差可以先推算方位角闭合差,然后将闭合差平均分配到每站测的角度上进行角度平差。然后用平差后的角度推算坐标闭合差,得到的x和y的闭合差平均分配到每一站的坐标上即可 ,求得导线绝对闭合差,在除以导线全长得到导线全长相对闭合差 导线平差主要是看方向中误差和导线全长闭合差及导线全长相对闭合差 工程测量闭合导线差怎么计算的??? 闭合导线平差手算简单来讲分两步: 1.先计算出导线闭合环内角和,它与理论值(n-2)x180相减产生的闭合差平均分配到各个转角。使修正后的内角和等于理论值。 2.根据已知坐标方位角(已知两点坐标可求得坐标方位角)与修正后的各个转角值求出导线边坐标方位角。再通过方位角、导线边的长度计算出各个导线边产生的坐标增量。算到起算点后,X、Y 增量和的理论值均应为0。但因观测误差,坐标增量和往往不等于0。将偏差值平均分配到各个点位上,以消除偏差。 最后,用起算坐标依次加上修正后的坐标增量,就可以得到平差后各点的坐标值了。 从一个已知点出发,在连续测量多个点位后再到原出发点,这就叫导线的闭合,因为误差的存在,在闭合时有可能产生误差,这时你需要将误差以每根导线长度为权重进行平差。 看到百笑狂生的回答了,忍不住想说几句,这个什么“原位往复闭合”、“开路测量闭合”等等,你是从哪儿学来的概念?反正在测量这个专业里是没有这个概念的,楼主所说的导线测量,是建立平面控制网的一种最常见的测量方法,下面我简单介绍一下: 一、导线进行测量共有三种方法: 1、从一个已知点出发,依次对各个目标点进行测量,这种测量方式,因为累积误差的原因,在精度要求较高的场合一般不采用,也谈不上什么闭合不闭合的问题; 2、从一个已知点出发,依次对各个目标点进行测量后,再回到这个已知点,也就是说,将已知点做为测量的最后一个点也进行测量。如果没有误差出现,那么最后一个点的测量结果应与已知点相同,这就叫导线的闭合。如果有误差你再根据规范要求进行平差; 3、还有一种情况便是从一个已知点出发,依次对各个目标点进行测量后,最后回到另一个已知点,这种情况的闭合叫“导线闭合于某已知点”,由此可见,这个测量结果还包含了原已知点的误差,因此其精度不及前者,但有时限于测量对象分布条件的限制,可能也得采用。 上述测量方法,同时适用于水准测量,水准测量同样也采用导线法,但所采用的仪器不同(以前测量时是分开的,现在因为全站仪的出现已经同步进行了)。二、百笑狂生所谓的第一种测量方法,类似于导线中某个点的测量程序,对某个
导线测量平差教程
计算方案的设置 一、导线类型: 1.闭、附合导线(图1) 2.无定向导线(图2) 3.支导线(图3) 4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。而且该类型不需要填写未知点数目。当点击表格最后一行时自动添加一行,计算时删除后面的空行。 5.坐标导线。指使用全站仪直接观测坐标、高程的闭、附合导线。 6.单面单程水准测量记录计算。指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。当输入了“中视”时可以用作中平测量等的记录计算。 说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。 二、概算 1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。 2.应选择相应的坐标系统,以及Y坐标是否包含500KM。选择了概算时,Y坐标不应包含带号。
三、等级与限差 1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。如果填写的值不符合您所使用的规范,则再修改各项值的设置。比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。 2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。 四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算 1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。 2.严密平差:按最小二乘法原理平差。 3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。当采用简化方法平差时,应以平差后坐标反算的角度和边长作为成果。 《城市测量规范》规定:四等以下平面控制网可采用近似平差法和按近似方法评定其精度。......采用近似平差方法的导线网,应根据平差后坐标反算的方位角与边长作为成果。 因此,严密平差适用于各种等级的控制网,而近似平差适用于较低等级。当采用近似平差时,应进行方位角、边长反算。 显示角度改正前的坐标闭合差:勾选此项后,程序在“平面计算表”备注栏内显示角度改正前的坐标闭合差,否则显示角度改正后的坐标增量闭合差。为了以示区别,角度改正前的坐标闭合差以Wx、Wy、Ws表示,角度改正后的坐标增量闭合差以fx、fy、fs表示。 五、近似平差设置 1.方位角、边长反算:根据近似平差后的坐标反算方位角、边长、角度等。反算后的方位角、边长、角度等是平差后的最终值,可以作为最终成果使用,否则仅为平差计算的中间结果,不应作为最终成果使用。反算与不反算表格形式是不一样的。注意:反算后,按最终的角度值
附合导线平差教程
附合导线导线平差步骤 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: αA1=αBA+180°+β A α12=αA1+180°+β 1 α2C=α12+180°+β 2 +)α CD ′=α 2C +180°+β C αCD′=αBA+43180°+∑β测左计算终边坐标方位角的一般公式为: α 终边′=α 始边 +n2180°+∑β测左(2-5) 式中n为导线观测角个数。 角度闭合差的计算公式为: f β测 =α终边′-α终边(2-6)
图2-21 附合导线计算示意图 角度闭合差f β的大小,表明测角精度的高低。对于不同等级的导线,有不同的限差(即f β容)要求,例如图根导线角度闭合差的允许值为: f β容=±60″n (2-7) 式中n 为多边形内角的个数。这一步计算见辅助计算栏,f β测=+41″, f β 容 =±120″。 若f β测≤f β容,说明测角精度符合要求,此时需要进行角度闭合差的调整。 调整是应注意:当用左角计算α终边 ′时,改正数的符号与f β测符号相反;当用右 角计算α 终边 ′时,改正数的符号与f β测符号相同。可将闭合差按相反符号平均分 配给各观测角,而得出改正角: β=β测-f β测/n (2-8) 式中n 为多边形内角的个数。按(-f β测/n )式计算的改正数,取位至秒,填入表格第3列。 当f β测>f β容时,则说明测角误差超限,应停止计算,重新检测角度。 (3)坐标方位角的推算 根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。否则,应重新推算。例如 α CD ′ =α 2C +180°+βC =139°50′18″+180°+49°02′38″=8°52′ 55″ (4)坐标增量的计算及闭合差调整 坐标增量计算,就是根据已经推算出的导线各边的坐标方位角和相应边的边长,按式(2-9)、(2-10)计算各边的坐标增量。 ΔX AB =D AB 2cos αAB (2-9)
南方平差易使用说明
前言 关于平差易(PA2005) 平差易(Power Adjust 2005,简称PA2005),它是在Windows系统下用VC 开发的控制测量数据处理软件,也是南方测绘PA2002的升级产品。它一改过去单一的表格输入,采用了Windows风格的数据输入技术和多种数据接口(南方系列产品接口、其他软件文件接口),同时辅以网图动态显示,实现了从数据采集、数据处理和成果打印的一体化。成果输出丰富强大、多种多样,平差报告完整详细,报告内容也可根据用户需要自行定制,另有详细的精度统计和网形分析信息等。其界面友好,功能强大,操作简便,是控制测量理想的数据处理工具。 开发商 PA2005由南方测绘仪器公司开发,软件产品以及说明文档版权属广州南方测绘仪器公司,受著作权法保护,任何未经广州南方测绘仪器公司书面同意的修改、复制和反编译均属违法行为,由于非法使用本软件产生的后果,南方测绘仪器公司不承担任何法律责任,南方测绘仪器公司保留对软件产品的解释权限。 版权及注册商标 AutoCAD、Arc/Info、MapInfo、MGE、Nikon、Leica、Geodimeter、Sokkia、Topcon、Pentax等分别为软件和相关公司的专用名称或注册商标,本手册仅为引用。 本公司相关产品
作为政府信息产业部门认定的软件企业,南方测绘仪器公司一直致力于地理信息采集、成图及管理软件的开发与方案提供。目前,公司的主要软件产品有: CASS是本公司开发的数字化地形地籍成图软件,该产品无论技术还是市场都已稳居国内同类产品的领先地位。 CLC为本公司开发的基于MapINFO平台的地籍信息管理专用软件,已在土地行业得到了广泛的应用。 CASSCAN为本公司的地图扫描矢量化专用软件,主要用于栅格地图的矢量化处理,是已有白纸地图进入GIS的必备软件,它与CASS、CLC及本软件都具有完美的数据接口。 SHIS for SM是本公司开发的房产信息系统(测绘版),主要用于房产图测绘、房产勘丈,房屋面积分摊、各种房产图件制作等工作,是房产测绘部门的首选软件。 “测图精灵”(MG2005)、“工程精灵”(EG2005)是南方测绘仪器公司开发的“测绘通”系统产品,分别用于数字测图与工程测量的外业数据采集与处理。 与本软件平行,本公司还发布“控制精灵”(CG2005)。它是一个基于掌上机的控制测量外业的采集与记录工具,它所的数据可以直接导入本软件中,从而实现控制测量内、外业的一体化。 本公司还提供房产、土地等行业信息系统的构建与开发方案。 南方测绘仪器公司对以上产品及命名享有版权。 产品构成 技术服务 用户在购买PA2005正版软件并成为注册用户之日起,将长期享受南方测绘仪器公司的技术服务及升级政策。用户应及时填写和回寄软件包装盒中的“用户注册卡”,以便成为PA2005的注册用户。 您可以通过下述方式的任何一种享受南方公司快捷的技术服务:
测量平差公式.pdf
闭合导线坐标计算 闭合导线计算式根据外业观测的边长、夹角和方位角以及其中一个导线点的坐标,结合平差计算,来推算其余各导线点的坐标。 设对闭合导线n 个内角分别进行了观测,各个符号精度要求的观测值为 βi 测,并对闭合多边形的n 个边长分别进行了测量,各个符号精度要求的观测值为 L i ;其中一个导线点的坐标为x i y i ;确定其余各个导线点的坐标x x i 1+,y i 1+ 1 角度闭合差的计算也调整 (1)实测角度闭合差的计算 闭合导线n 个实测内角的和 ∑测β不等于其理论值(n-2)*180,其差称为角度闭合差以f β 表示: ???=∑180*2)(测n f β β (2)实测角度闭合差检核 角度闭合差校核是将实测角度闭合差也同级导线角度闭合差的容许值f 容β,按各级导线测 量主要技术要求比较,以确定角度综合限差是否满足要求。这里角度综合限差采用图根导线数据,即f 容β=40''n 。 (3)角度闭合差的调整 若f β≤f 容β ,则可以进行角度闭合的调整,否则,应分析情况重测。角度闭合差的调整原则是,将f β以相反的符号平均分配到各个观测角中,即各点改正数为式 v β= f β/n 计算时,根据角度的取位的要求,改正数可凑整到1″、6″、10″.若不能均分,一般情况下,因短边角引起的误差较大,因此给短边角的夹角多分配一点,使各角改正数的总和也反号的闭合差相等,即f v ββ?=∑ 2、推算各边的坐标方位角 推算各边的坐标方位角目的是为了计算坐标增量。推算方法根据起始方位角及改正后的
转折角,按式依次推算出各边的坐标方位角。 或 βαα右 ?+=+1801i i 1801?+=+βαα左 i i 式中: αi ----------第i 条边的正方位角 α 1?i ---------第i+1条的正方位角 ββ右左--------分别为第i-1条边与第i 条边间所夹的左右角。 在推算过程中,如果算出αi >360°,则应减去360°如果算出的αi <0°,则应加 上360° 为了发现推算过程中的差错,最后必须推算至起始边的坐标方位角,看其是否与已知值相等,以此作为计算校核。 3 坐标增量闭合差的计算和调整 (1)计算实测各边的坐标增量 设第i 条实测边的终、横坐标增量分别为 αi i i L X cos .=? 测 αi i i L Y sin .=?测 (2)确定理论纵、横坐标增量∑△Xi 理、∑△Yi 理 闭合导线的纵横坐标增量总和的理论值应为零,则有 ∑△Xi 理=0 ∑△Yi 理=0 (3)计算坐标增量闭合差fx.fy 由于测量误差,改正后的角度仍有残余误差,坐标增量总和的测量计算值∑△X 测与∑△Y 测一般都不为零,其值称为坐标增量闭合差,fx.fy 表示,则 fx=∑△Xi 测-∑△Xi 理=∑△Xi 测 fy=∑△Yi 测-∑△Yi 理=∑△Yi 测 (4)计算导线全长闭合差f 并检核全长相对闭合差K 因计算的闭合导线并不闭合,而存在一个缺口,这个缺口的长度称为导线闭合差f fy fx f 22+= 导线越长,全长闭合差也越大。通常用相对闭合差来衡量导线测量的精度,导线的全长相对
南方测绘 平差易2005说明书
南方测绘系列软件 平差易 Power Adjust 2005 用户手册 总体负责:范铀 编者:夏玉平 陈一舞 广东南方数码科技有限公司 2005年2月
目录 前言 关于平差易--------------------------------------------------------------------------1 开发商--------------------------------------------------------------------------------1 版权及注册商标--------------------------------------------------------------------1 本公司相关产品--------------------------------------------------------------------1 技术服务-----------------------------------------------------------------------------2 如何安装平差易 安装步骤-----------------------------------------------------------------------------3 浏览平差易 启动平差易--------------------------------------------------------------------------7 主界面--------------------------------------------------------------------------------7 下拉菜单-----------------------------------------------------------------------------7 文件--------------------------------------------------------------------------------7 编辑--------------------------------------------------------------------------------8 平差--------------------------------------------------------------------------------8 成果--------------------------------------------------------------------------------8 窗口--------------------------------------------------------------------------------9 工具--------------------------------------------------------------------------------9 工具条-----------------------------------------------------------------------------9 由观测数据到平差成果 用平差易做控制网平差的过程-------------------------------------------------10 作业流程图-------------------------------------------------------------------------10 向导式平差-------------------------------------------------------------------------10 向导式平差的应用----------------------------------------------------------------10 控制网数据的录入----------------------------------------------------------------14 导线实例-------------------------------------------------------------------------16 水准实例-------------------------------------------------------------------------19 三角高程实例-------------------------------------------------------------------21 平差过程操作----------------------------------------------------------------------24 打开数据文件----------------------------------------------------------------------24 近似坐标的推算-------------------------------------------------------------------24 选择概算----------------------------------------------------------------------------25 计算方案的选择-------------------------------------------------------------------29 闭合差计算与检核-----------------------------------------------------------------31
导线网平差算例
导线网平差算例用平差易软件做控制网平差的过程 第一步:控制网数据录入 第二步:坐标推算 第三步:坐标概算 第四步:选择计算方案 第五步:闭合差计算与检核 第六步:平差计算 第七步:平差报告的生成和输出 作业流程图: 制据的录入计算与检 坐标推算 平差是否否选择计算方案概算是平差报告的生成和输出坐标概算
实例1 符合导线实例 这是一条符合导线的测量数据和简图,A、B、C和D是已知坐标点,2、3和4是待测的控制点。原始测量数据如下: 导线原始数据表 导线图如下: 导线图 第一步:录入原始数据 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。 如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测 站A的观测信息”所示: 测站A的观测信息 以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示:
测站C的观测信息 2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示: 测站2的观测信息 以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3 的观测信息” 所示: 测站3的观测信息 以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息” 所示: 测站4的观测信息 说明:①数据为空或前面已输入过时可以不输入(对向观测例外) ②在电子表格中输入数据时,所有零值可以省略不输。 以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A): [STATION] (测站信息) B,10,8345.870900,5216.602100 A,10,7396.252000,5530.009000 C,10,4817.605000,9341.482000 D,10,4467.524300,8404.762400 2,00 3,00 4,00 [OBSER] (观测信息) A,B,,1000.0000
[管理]附合导线平差步骤
[管理]附合导线平差步骤 控制点坐标平差处理 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: α,α,180?,βA1BAA α,α,180?,β12A11 α,α,180?,β2C122 ′,)α,α,180?,βCD2CC
′α,α,4?180?,?βCDBA测左 计算终边坐标方位角的一般公式为: α′,α,n?180?,?β (2-5)终边始边测左 式中n为导线观测角个数。 角度闭合差的计算公式为: f,α′,α (2-6)β测终边终边 图2-21 附合导线计算示意图 角度闭合差f的大小,表明测角精度的高低。对于不同等级的导线,有不β同的限差(即f)要求,例如图根导线角度闭合差的允许值为:β容 nf,?60″ (2-7)β容 ,+41″, f式中n为多边形内角的个数。这一步计算见辅助计算栏,fββ测,?120″。容 若f?f,说明测角精度符合要求,此时需要进行角度闭合差的调整。β测β容 调整是应注意:当用左角计算α′时,改正数的符号与f符号相反;当用右终边β测角计算α′时,改正数的符号与f符号相同。可将闭合差按相反符号平均分终边β测 配给各观测角,而得出改正角: β,β,f/n (2-8)测β测 式中n为多边形内角的个数。按(,f/n)式计算的改正数,取位至秒,填β测入表格第3列。