第二章-结构的几何构造分析(龙驭球第三版)

第2章结构的几何构造分析
本章内容:§2-1 几何构造分析的几个概念
§2-2 平面几何不变体系的组成规律
§2-3 平面杆件体系的计算自由度
§2-4 在求解器中输入平面结构体系(略)
§2-5 用求解器进行几何构造分析(略)
§2-6 小结
主要内容:
第三讲
§2-1 几何构造分析的几个概念
1. 几何不变体系和几何可变体系
一般结构必须是几何不变体系
几何不变体系—在不考虑材料应变的条件下,体系的位置和形状是不能改变的。
几何可变体系—在不考虑材料应变的条件下,体系的位置和形状是可以改变的。
2. 自由度
平面内一点有两种独立运动方式,即一点在平面内有两个自由度。
一个刚片在平面内有三种独立运动方式,即一个刚片在平面内有三个自由度。
自由度个数=体系运动时可以独立改变的坐标数
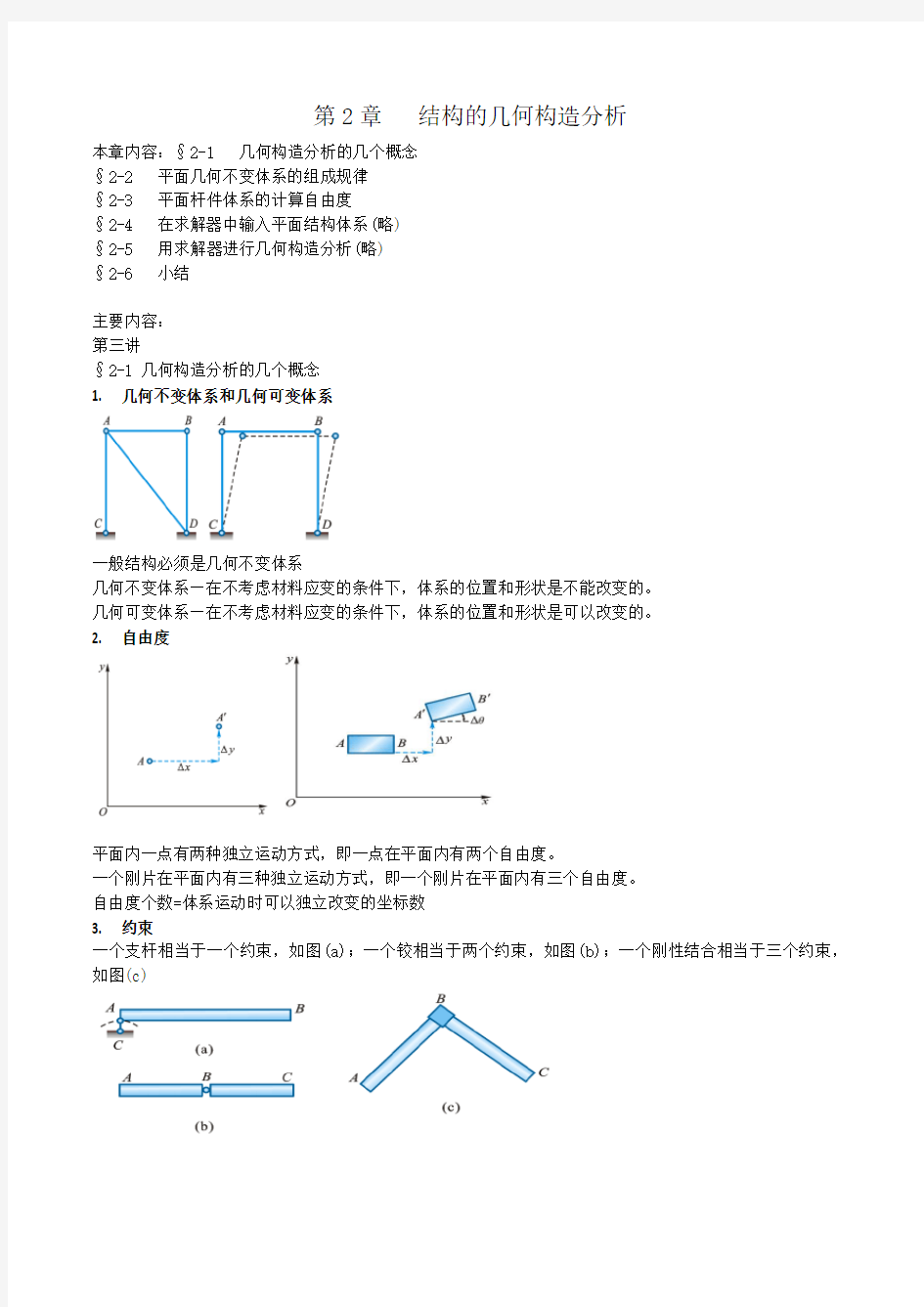
3. 约束
一个支杆相当于一个约束,如图(a);一个铰相当于两个约束,如图(b);一个刚性结合相当于三个约束,如图(c)
4. 多余约束
如果在一个体系中增加一个约束,而体系的自由度并不减少,此约束称为多余约束。
有一根链杆是多余约束
5. 瞬变体系
特点:从微小运动的角度看,这是一个可变体系;经微小位移后又成为几何不变体系;在任一瞬变体系中必然存在多余约束。
可变体系
瞬变体系:可产生微小位移
常变体系:可发生大位移
6. 瞬铰
O为两根链杆轴线的交点,刚片I可发生以O为中心的微小转动,O点称为瞬时转动中心。
两根链杆所起的约束作用相当于在链杆交点处的一个铰所起的约束作用,这个铰称为瞬铰。
7. 无穷远处的瞬铰
两根平行的链杆把刚片I与基础相连接,则两根链杆的交点在无穷远处。两根链杆所起的约束作用相当于无穷远处的瞬铰所起的作用。
无穷远处的含义
(1)每一个方向有一个∞点;
(2)不同方向有不同的∞点;
(3)各∞点都在同一直线上,此直线称为∞线;
(4)各有限点都不在线∞上。
§2-2 平面几何不变体系的组成规律
1. 三个点之间的连接方式
规律1 不共线的三个点用三个链杆两两相连,则所组成的铰接三角形体系是一个几何不变的整体,且没有多余约束。
2. 一个点与一个刚片之间的连接方式
规律2 一个刚片与一个点用两根链杆相连,且三个铰不在一直线上,则组成几何不变的整体,且没有多余约束。
3. 两个刚片之间的连接方式
规律3 两个刚片用一个铰和一根链杆相连,且三个铰不在一直线上,则组成几何不变的整体,且没有多余约束。
4. 三个刚片之间的连接方式
规律4 三个刚片用三个铰两两相连,且三个铰不在一直线上,则组成几何不变的整体,且没有多余约束。如图(a)。
两根链杆的约束作用相当于一个瞬铰的约束作用,如图(b)。
瞬变体系(三链杆交于同一点)
规律5(如图(b) )
两个刚片用三根链杆相连,且三链杆不交于同一点,则组成几何不变的整体,且没有多余约束。
四种基本组成规律三种基本装配格式
(1)固定一个结点的装配格式:用不共线的两根链杆将结点固定在基本刚片上,称为简单装配格式。如图:
(2)固定一个刚片的装配格式:用不共线的铰和一根链杆,或用不共点的三根链杆将一个刚片II固定在基本刚片I上,称为联合装配格式。如图:
(3)固定两个刚片的装配格式:用不共线的三个铰将两个刚片Ⅱ、Ⅲ固定在基本刚片I上,称为复合装配格式。如图:
装配过程有两种:
(1)从基础出发进行装配:取基础作为基本刚片,将周围某个部件按基本装配格式固定在基本刚片上,形成一个扩大的基本刚片,直至形成整个体系。如图:
(2)从内部刚片出发进行装配:在体系内部选取一个或几个刚片作为基本刚片,将周围的部件按基本装配格式进行装配,形成一个或几个扩大的基本刚片。将扩大的基本刚片与地基装配起来形成整个体系。如图:
例2-1 试分析图示体系的几何构造。
解(1)分析图(a)中的体系
三角形ADE—刚片I,三角形AFG—刚片Ⅱ,基础—刚片Ⅲ,A、B、C、三个铰不共线,则体系为无多余约束的几何不变体系。
(2)分析图(b)中的体系
折线杆AC—链杆2,折线杆BD—链杆3,T形刚片由链杆1、2、3与基础相连。如三链杆共点,则体系是瞬变的。否则,体系为无多余约束的几何不变体系。
例2-2 试分析图示体系的几何构造。
解(1)分析图(a)中的体系
以刚片ⅠⅡⅢ为对象,由于三个瞬铰不共线,因此体系内部为几何不变,且无多余约束。作为一个整体,体系对地面有三个自由度。
(2)分析图(b)中的体系
同样方法进行分析,由于三个瞬铰共线,因此体系内部也是瞬变的。
例2-3 试用无穷远瞬铰的概念,分析图示各三铰拱的几何不变性。
刚片ⅠⅡ与基础Ⅲ用三个铰OⅠ,Ⅱ、OⅡ,Ⅲ、OⅠ,Ⅲ两两相连,其中OⅠ,Ⅱ为无穷远瞬铰。如果另外两铰的连线与链杆1、2平行,则三铰共线,体系是瞬变的。否则,体系为几何不变,且无多余约束。
刚片ⅠⅡ与基础Ⅲ用三个铰两两相连,其中OⅠ,Ⅱ和OⅡ,Ⅲ是两个不同方向的无穷远瞬铰,它们对应∞线上的两个不同的点。铰OⅠ,Ⅲ对应有限点。因有限点不在∞线上,则三铰不共线,体系为几何不变,且无多余约束。
刚片ⅠⅡ与基础Ⅲ之间的三个铰都在无穷远瞬点。由于各∞点都在同一直线上,因此体系是瞬变的。
总结
(1)体系一般是由多个构造单元逐步形成的。
(2)要注意约束的等效替换。
(3)体系的装配方式可以不同。
§2-3 平面杆件体系的计算自由度
S—体系自由度的个数
n—体系多余约束的个数
W—计算自由度
体系是由部件加约束组成:
a—各部件的自由度数的总和
c—全部约束中的非多余约束数
d—全部约束的总数
S=a-c W=a-d S-W=n
S≥0 n≥0
S≥W n≥-W
W 是自由度数S 的下限,(–W)是多余约束数n的下限
(a)内部没有多余约束的刚片
(b)内部有一个多余约束的刚片
(c)内部有两个多余约束的刚片
(d)内部有三个多余约束的刚片
图(a)两个刚片ⅠⅡ间的结合为单结合。
图(b)三个刚片间的结合相当于两个单结合,n个刚片间的结合相当于(n-1)个单结合。
单链杆:连接两点的链杆相当于一个约束
复链杆:连接n个点的链杆相当于2n-3个单链杆
自由度算法一(体系由刚片加约束组成)
m—体系中刚片的个数
g—单刚结个数
h—单铰结个数
b—单链杆根数
刚片自由度个数总和:3m
体系约束总数:3g+2h+b
体系计算自由度:
W=3m-(3g+2h+b)
自由度算法二(体系由结点加链杆组成)
j—体系中结点的个数
b—单链杆根数
结点自由度个数总和:2j
体系约束总数: b
体系计算自由度:W=2j-b
若W>0,则S >0,体系是几何可变的
若W=0,则S=n,如无多余约束则为几何不变,如有多余约束则
为几何可变
若W<0,则n>0,体系有多余约束
例2-4 试计算图示体系的W。
方法一:
m=7,h=9,b=3,g=0
W=3m-2h-b=3×7-2×9-3=0
方法二:
j=7,b=14
W=2j-b=2×7-14=0
例2-5 试计算图示体系的W。
将图(a)中全部支座去掉,在G处切开,如图(b) m=1,h=0,b=4,g=3
W=3m-(3g+2h+b)=3×1-(3×3+2×0+4)=-10
体系几何不变,S=0 n=S-W=0-(-10)=10 具有10个多余约束的几何不变体系
例2-6 试计算图示体系的W。
两个体系j=6,b=9,W=2j-b=2×6-9=3 图(a)是一个内部几何不变且无多余约束的体系
S-3=0 n=0
图(b)是一个内部瞬变且有多余约束的体系
S-3= n>0
§2-6 小结
1 几何构造分析的两个主要问题
对杆件体系进行几何构造分析
判断体系是否可变,确定S
判断体系中有无多余约束,确定n
对杆件结构进行几何构造分析
结构应是几何不变体系,S=0
结构分为静定(n=0)和超静定(n>0)
结构的几何构造分析概念
结构的几何构造分析概念 1-1 1、几何组成分析的目的主要是分析、判断一个体系是否几何可变,或者如何保证它成为几何不变体系,只有几何不变体系才可以作为结构。 几何可变体系:不考虑材料应变条件下,体系的位置和形状可以改变的体系。几何不变体系:不考虑材料应变条件下,体系的位置和形状保持不变的体系。 2、自由度:描述几何体系运动时,所需独立坐标的数目。 平面内一个动点A,其位置要由两个坐标 x 和 y 来确定,所以一个点的自由度等于2。平面内一个刚片,其位置要由两个坐标 x 、y 和AB 线的倾角α来确定,所以一个刚片在平面内的自由度等于3。 3、刚片:平面体系作几何组成分析时,不考虑材料应变,所以认为构件没有变形。可以把一根杆、巳知是几何不变的某个部分、地基等看作一个平面刚体,简称刚片。 4、约束:如果体系有了自由度,必须消除,消除的办法是增加约束。约束有三种: 5、多余约束:减少体系独立运动参数的装置称为约束,被约束的物体称为对象。使体系减少一个独立运动参数的装置称为一个约束。例如一根链杆相当于一个约束;一个连接两个刚片的单铰相当于二个约束;一个连接n个刚片的复铰相当于n—1个单铰;一个连接二个刚片的单刚性节点相当于三个约束;一个连接n 个刚片的复刚性节点相当于n—1个单刚性节点。如果在体系中增加一个约束,体系减少一个独立的运动参数,则此约束称为必要约束。如果在体系中增加一个约束,体系的独立运动参数并不减少,则此约束称为多余约束。平面内一个无铰的刚性闭合杆(或称单闭合杆)具有三个多余约束。
6、瞬变体系及常变体系:常变体系概念:体系可发生大量的变形,位移。区别于瞬变体系:瞬变体系概念:体系可发生微小的变形,位移。 7、瞬铰:两刚片间以两链杆相连,其两链杆约束相当(等效)于两链杆交点处一简单铰的约束,这个铰称为瞬铰或虚铰。 2-2平面杆件体系的计算自由度 1、体系是由部件(刚片或结点)加上约束组成的。 2、刚片内部:是否有多余约束。内部有多余约束时应把它变成内部无多余约束的刚片,而它的附加约束则在计算体系的约束总数时应当考虑进去。 3、复铰:连接两个以上刚片的铰结点。连接n个刚片的铰相当于(n-1)个单铰。 4、单链杆:连接两个铰结点的链杆。 5、连接两个以上铰结点的链杆。 连接 n 个铰结点的复链杆相当于(2n-3)个单链杆。 6、平面体系的计算自由度 W :W=3m-(2n+r) m:钢片数 n:单绞数 r:支座链杆数上面的公式是通用的。 W=2J-(b+r) J:结点个数 b:链杆数 r:支座链杆数上面的公式用于完全由铰接的连杆组成的结构体系。 7、自由度与几何体系构造特点: 静定结构的受力分析
第2章结构的几何构造分析.
第2章结构的几何构造分析 §2-1几何构造分析的几个概念 (自由度计算公式) §2-2平面几何不变体系的组成规律 ▲几何构造分析目的: Q 判别体系可否作为结构 b )为结构计算打下基础 UmVflMITV Off BCMNCM Mh<3 TaCHHOLCXlV 第二章结构的几何构造分析 (不考虑材料的变形) §2-1几何构造分析的几个概念 一、两类体系 ■**' i■- - ——L - — - ___ ~二=一? ----------- P Z Z 几何可变体系 体系在荷《作用下? 其几何形状和位S 都不能改变? 体系受到很小的作用力, 其几何形状或位S 都可以改 几何不变体系
▲刚片一所有的《几何形状不变体系”均可视为刚片. (可以是杆.由杆组成的结构.支撑结构的地基) 二、自由度 1?定义:用来确定体系位£所需舷立(最少)坐标的数目. 2.举例 y Yl 平面动点:w=2 ( XI, yl ) 规律:体系有《个独立的运动方式,就有《个自由度. 三、约束(联系) 1?定义:阻止或限制体系运动的装置(减少自由度的装置). 2?约束类型(链杆、刚接、单较、复胶、固定端、平行支《杆零) ■ X 平面刚片:W=3 (xU yU卩)
1)链杆(支杆) 1个链杆=1个约束。链杆 可以是曲的. 折的杆,只要保持两姣间 $巨不变. 2 )刚性连接 1个刚接=3个约束 W=3X2—3=3 3)单较 1个单较=2个约束=2个的单链杆。 W=3X2—2=4 瞬枝——在运动中瞬枝的位置不定,这 是瞬较和实较的区别.通常我们研究的是 扌旨定位置处的瞬时运动,因此,瞬枝 和实咬所起的作用是相同的,都是相对 转动中心. 两根不共线的链杆相当 于一个单镀.
结构力学 第二章 几何组成分析(典型例题)
[例题2-1-1] 计算图示体系的自由度。 ,可变体系。 (a ) ( b ) 解: (a ) 几何不变体系,无多余约束 ( b ) 几何可变体系 [例题2-1-2 ] 计算图示体系的自由度。桁架几何不变体系,有多余约束。 解: 几何不变体系,有两个多余约束 [例题 2-1-3] 计算图示体系的自由度。桁架自由体。 解: 几何不变体系,无多余约束 [例题 2-1-4] 计算图示体系的自由度。 ,几何可变体系。 解: 几何可变体系 [例题 2-1-5] 计算图示体系的自由度。刚架自由体。 解: 几何不变体系,有6个多余约束 [例题2-2-1] 对图示体系进行几何组成分析。两刚片规则。 几何不变体系,且无多余约束 [例题2-2-2] 对图示体系进行几何组成分析。两刚片规则。 几何不变体系,且无多余约束 [例题2-2-3] 对图示体系进行几何组成分析。两刚片规则。 几何不变体系,且无多余约束 [例题2-2-4] 对图示体系进行几何组成分析。两刚片规则。
几何不变体系,有一个多余约束 [例题2-2-5] 对图示体系进行几何组成分析。二元体规则。几何不变体系,且无多余约束 [例题2-2-6 ] 对图示体系进行几何组成分析。两刚片规则,三刚片规则。 几何不变体系,且无多余约束 [例题2-2-7] 对图示体系进行几何组成分析。三刚片规则。 几何不变体系,且无多余约束 [例题 2-2-8] 对图示体系进行几何组成分析。三刚片规则。 几何不变体系,且无多余约束[例题2-3-1] 对图示体系进行几何组成分析。两刚片规则。 几何瞬变体系 [例题2-3-2] 对图示体系进行几何组成分析。两刚片规则。 几何瞬变体系 [例题2-3-3] 对图示体系进行几何组成分析。三刚片规则。 几何瞬变体系 [例题2-3-4] 对图示体系进行几何组成分析。三刚片规则。
结构力学 几何构造分析
1.图 示 体 系 是 几 何 不 变 体 系 。 ( ) 2.有 多 余 约 束 的 体 系 一 定 是 几 何 不 变 体 系 。 ( ) 3.图 示 体 系 是 : A .几 何 瞬 变 有 多 余 约 束 ; B .几 何 不 变 ; C .几 何 常 变 ; D .几 何 瞬 变 无 多 余 约 束 。 ( ) 4.在 不 考 虑 材 料 的 条 件 下 ,体 系 的 位 置 和 形 状 不 能 改 变 的 体 系 称 为 几 何 体 系 。 ( ) 5几 何 组 成 分 析 中 ,在 平 面 内 固 定 一 个 点 ,需 要 。 6图 示 体 系 是 体 系 ,因 为 。 7联 结 两 个 刚 片 的 任 意 两 根 链 杆 的 延 线 交 点 称 为 ,它 的 位 置 是 定 的 。 8试 对 图 示 体 系 进 行 几 何 组 成 分 析 。 A C D B 9对 图 示 体 系 进 行 几 何 组 成 分 析 。 A C D B E 10对 图 示 体 系 进 行 几 何 组 成 分 析 。 A C D B 11对 图 示 体 系 进 行 几 何 组 成 分 析 。 A B C D E F 12对 图 示 体 系 进 行 几 何 组 成 分 析 。 A C D E F 13对 图 示 体 系 进 行 几 何 组 成 分 析 。 B C D E F A G 14对 图 示 体 系 进 行 几 何 组 成 分 析 。 A B C D E 15对 图 示 体 系 进 行 几 何 组 成 分 析 。
A B C D E 16对 图 示 体 系 进行 几 何 组 成 分析 。 A B C D G E F 17对 图 示 体 系 进 行 几 何 组 成 分 析 。 A B C D E F G H K 18对 图 示 体 系 进 行 几 何 构 造 分 析 。 19对 图 示 体 系 进 行 几 何 构 造 分 析 。 20对 图 示 体 系 进 行 几 何 构 造 分 析 。 21对 图 示 体 系 作 几 何 构 造 分 析 。 22对 图 示 体 系 进 行 几 何 组 成 分 析 。( 图 中 未 编 号 的 结 点 为 交 叉 点 。) A C B D E F 23对 图 示 体 系 进 行 几 何 组 成 分 析 。 A B C D E F 24三 个 刚 片 用 三 个 铰 两 两 相 联 时 的 瞬 变 原 因 是_________________________。 25图 示 体 系 按 三 刚 片 法 则 分 析 , 三 铰 共 线 , 故 为 几 何 瞬 变 体 系 。 ( ) 26图 示 体 系 为 几 何 不 变 有 多 余 约 束 。 ( ) 27图 示 体 系 为 几 何 瞬 变 。 ( ) 28图 示 对 称 体 系 为 几 何 瞬 变 。 ( )
第二章 几何组成分析
第二章 几何组成分析 1. 图示铰接体系是超静定结构。 ( ) 2. 图中多余联系数目为4。 ( ) 3. 图示体系是超静定结构。 ( ) 4. 图示体系在给定荷载情况下可处于平衡,因此可作为结构承担荷载。 ( )
5. 图示体系是超静定结构。 ( ) 6. 图中体系多余联系数目为。 ( ) 7. 图中体系多余联系数目为。 ( ) 8. 铰A相当于几个简单铰。 ( )
9. 图示多余联系数目为 ( ) 10. 图示多余联系数目为 ( ) 11. 两刚片用一杆一铰彼此相连,所组成的体系是 ( ) A.有多余联系几何不变体系 B.可变性无法确定 C.无多余联系几何不变体系 D.瞬变体系 12. 图示体系是 ( ) A.常变的 B.无多余联系几何不变的 C.瞬变的 D.有多余联系几何不变的
13. 静定结构是 ( ) A.常变体系 B.有多余联系几何不变体系 C.体系 D.余联系几何不变 14. 三刚片用三个不共线的铰两两相连,则所组成的体系是 ( ) A. 瞬变 B. 常变 C.余联系几何不变 D.变也可能瞬变 15. 图示体系是 ( ) A. 常变的 B. 无多余约束几何不变的 C. 瞬变的 D. 有多余约束几何不变的 16. 图示铰接体系是 ( ) A. 常变的 B. 无多余约束几何不变的
C. 瞬变的 D. 有多余约束几何不变的 17. 图示铰接体系是 ( ) A. 常变的 B. 无多余约束几何不变的 C. 瞬变的 D. 有多余约束几何不变的 18. 图示体系是 ( ) A. 常变的 B. 无多余约束几何不变的 C. 瞬变的 D. 有多余约束几何不变的
第2章平面体系的几何组成分析
第2章平面体系的几何组成分析 10 .图示体系是---------------------------- 体系,因为02.有多余约束的体系一定是几何不变体系。( ) 03.图中链杆1和2的交点O可视为虚铰。( ) 11 .联结两个刚片的任意两根链杆的延线交点称为 ------------- ,它的位置是------------------ 定的 12 .试对图示体系进行几何组成分析。 04.三个刚片用三个铰两两相互联结而成的体系是: A ?几何不变; B?几何常变; C.几何瞬变; D.几何不变几何常变或几何瞬变。() 05.联结三个刚片的铰结点,相当的约束个数为: A . 2 个; B. 3 个; C. 4 个; D.5个。() 06.两个刚片,用三根链杆联结而成的体系是: A ?几何常变; B.几何不变; C.几何瞬变; D.几何不 变或几何常变或几何瞬变。()07.图示体系是: A?几何瞬变有多余约束; B ?几何不变; C ?几何常变; D?几何瞬变无多余约束。() C B 13 . 14 . 对图示体系进行几何组成分析 成分析。 15 .对图示体系进行几何组成分 析。 E 08 .在不考虑材料------------- 的条件下,体系的位置和形状不能改变的体系称为几何------------- 体系 09 .几何组成分析中,在平面内固定一个点,需要
18.对图示体系进行几何组成分析。 19.对图示体系进行几何组成分析 20.对图示体系进行几何组成分析 21 .对图示体系进行几何组成分析。 16 . 对图示体系进行几何组成分 析。 对图示体系进行几何组成分析17 . E
结构力学 第二章 结构的几何组成分析
第二章 结构的几何组成分析 李亚智 航空学院·航空结构工程系
2.1 概述 结构要能承受各种可能的载荷,其几何组成要稳固。即受力结构各元件之间不发生相对刚体移动,以维持原来的几何形状。 在任意载荷作用下,若不考虑元件变形,结构保 持其原有几何形状不变的特性称为几何不变性。 在载荷作用下的系统可分为三类。 2.1.1 几何可变系统 特点: 不能承载,只能称作“机构”。 2 1 3 4 P 2’3’
2.1.2 几何不变系统 特点:能承载,元件变形引起几何形状的微小变化,可以称为结构。 2.1.3 瞬时几何可变系统 特点:先发生明显的几何变形,而后几何不变。 P 213 4 2’ 3’ 2’3’ P 2 1 34 5 ∞ →=2321N N 1 2 3 P 内力巨大,不能作为结构。 N 21 N 23 P 2
由以上分析可见,只有几何不变的系统才能承力和传力,作为“结构”。 系统几何组成分析的目的: (1)判断系统是否几何不变,以决定是否能作为结构 使用; (2)掌握几何不变结构的组成规律,便于设计出合理 的结构; (3)区分静定结构和静不定结构,以确定不同的计算 方法。
2.2 几何不变性的判断 2.2.1 运动学方法 将结构中的某些元件看成自由体,拥有一定数量的自由度; 将结构中的另一些元件看成约束。 如果没有足够多的约束去消除自由度,系统就无法保持原有形状。 所谓运动学方法,就是指这种引用“约束”和“自由度”的概念来判断系统几何不变性的方法。
1、自由度与约束(1)自由度的定义 决定一物体在某一坐标系中的位置所需要的独立变量的数目称为自由度,用n 表示。平面一个点有2个独立坐标,故n =2空间一个点有3个独立坐标,故n =3 x y y ?x ?A A ' x y A y A x A z A z A ' O
第二章 机构的结构分析要点
第一章绪论 1 何谓机器,何谓机构?它们有什么区别与联系? 2 参照内燃机的机构分析,试对机械手进行分解,说明它是由哪些机构组成的。 3 举例说明什么是构件、零件? 第二章机构的结构分析 1 什么是运动副、运动副元素、运动链?运动副是如何分类的? 2 何谓“高副”和“低副”?在平面机构中高副和低副一般各带入几个约束? 3 机构具有确定运动的条件是什么? 4 既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束? 5 杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构的级别有无影响? 6 图所示机构在组成上是否合理?指出其错误所在,并针对错误处更改局部运动副和构件,使之成为合理的机构。 7 计算图示平面机构的自由度,指出复合铰链、局部自由度和虚约束,在进行高副低代后,分析机构级别。 8 计算图所示机构的自由度,若有复合铰链、局部自由度或虚约束,应予以指出,并进行高副低代,确定该机构的级别。 9试计算图所示凸轮-连杆组合机构的自由度。
10 在图所示机构中,AB EF CD,试计算其自由度。 11试计算图所示齿轮-连杆组合机构的自由度。 12试计算图所示齿轮-连杆组合机构的自由度。 13 试确定图所示机构的自由度;并将其中的高副换成低副,确定机构所含的杆组合机构的级别(当取凸轮为原动件时)。
14计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别 15计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别 16根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。设标有箭头者为原动件,试判断该机构的运动是否确定,为什么? 17计算图示机构的自由度。如有复合铰链、局部自由度、虚约束,请指明所在之处。 A D E C H G F I B K 1 2 3 4 5 6 78 9 18计算图示各机构的自由度。 19计算图示各机构的自由度。
结构力学 第二章 几何组成分析(典型例题)
[例题2-1-1] 计算图示体系的自由度。,可变体系。 (a)(b) 解: (a ) 几何不变体系,无多余约束 (b ) 几何可变体系 [例题2-1-2] 计算图示体系的自由度。桁架几何不变体系,有多余约束。 解: 几何不变体系,有两个多余约束 [例题2-1-3] 计算图示体系的自由度。桁架自由体。 解: 几何不变体系,无多余约束 [例题2-1-4] 计算图示体系的自由度。,几何可变体系。 解: 几何可变体系 [例题2-1-5] 计算图示体系的自由度。刚架自由体。 解: 几何不变体系,有6个多余约束 [例题2-2-1] 对图示体系进行几何组成分析。两刚片规则。 几何不变体系,且无多余约束 [例题2-2-2] 对图示体系进行几何组成分析。两刚片规则。 几何不变体系,且无多余约束 [例题2-2-3] 对图示体系进行几何组成分析。两刚片规则。 几何不变体系,且无多余约束 [例题2-2-4] 对图示体系进行几何组成分析。两刚片规则。
几何不变体系,有一个多余约束 [例题2-2-5] 对图示体系进行几何组成分析。二元体规则。 几何不变体系,且无多余约束 [例题2-2-6] 对图示体系进行几何组成分析。两刚片规则,三刚片规则。 几何不变体系,且无多余约束 [例题2-2-7] 对图示体系进行几何组成分析。三刚片规则。 几何不变体系,且无多余约束 [例题2-2-8] 对图示体系进行几何组成分析。三刚片规则。 几何不变体系,且无多余约束[例题2-3-1] 对图示体系进行几何组成分析。两刚片规则。 几何瞬变体系 [例题2-3-2] 对图示体系进行几何组成分析。两刚片规则。 几何瞬变体系 [例题2-3-3] 对图示体系进行几何组成分析。三刚片规则。 几何瞬变体系 [例题2-3-4] 对图示体系进行几何组成分析。三刚片规则。
第二章-结构的几何构造分析(龙驭球第三版)
第2章结构的几何构造分析 本章内容:§2-1 几何构造分析的几个概念 §2-2 平面几何不变体系的组成规律 §2-3 平面杆件体系的计算自由度 §2-4 在求解器中输入平面结构体系(略) §2-5 用求解器进行几何构造分析(略) §2-6 小结 主要内容: 第三讲 §2-1 几何构造分析的几个概念 1. 几何不变体系和几何可变体系 一般结构必须是几何不变体系 几何不变体系—在不考虑材料应变的条件下,体系的位置和形状是不能改变的。 几何可变体系—在不考虑材料应变的条件下,体系的位置和形状是可以改变的。 2. 自由度 平面内一点有两种独立运动方式,即一点在平面内有两个自由度。 一个刚片在平面内有三种独立运动方式,即一个刚片在平面内有三个自由度。 自由度个数=体系运动时可以独立改变的坐标数 3. 约束 一个支杆相当于一个约束,如图(a);一个铰相当于两个约束,如图(b);一个刚性结合相当于三个约束,如图(c)
4. 多余约束 如果在一个体系中增加一个约束,而体系的自由度并不减少,此约束称为多余约束。 有一根链杆是多余约束 5. 瞬变体系 特点:从微小运动的角度看,这是一个可变体系;经微小位移后又成为几何不变体系;在任一瞬变体系中必然存在多余约束。 可变体系 瞬变体系:可产生微小位移 常变体系:可发生大位移 6. 瞬铰 O为两根链杆轴线的交点,刚片I可发生以O为中心的微小转动,O点称为瞬时转动中心。 两根链杆所起的约束作用相当于在链杆交点处的一个铰所起的约束作用,这个铰称为瞬铰。 7. 无穷远处的瞬铰
两根平行的链杆把刚片I与基础相连接,则两根链杆的交点在无穷远处。两根链杆所起的约束作用相当于无穷远处的瞬铰所起的作用。 无穷远处的含义 (1)每一个方向有一个∞点; (2)不同方向有不同的∞点; (3)各∞点都在同一直线上,此直线称为∞线; (4)各有限点都不在线∞上。 §2-2 平面几何不变体系的组成规律 1. 三个点之间的连接方式 规律1 不共线的三个点用三个链杆两两相连,则所组成的铰接三角形体系是一个几何不变的整体,且没有多余约束。 2. 一个点与一个刚片之间的连接方式 规律2 一个刚片与一个点用两根链杆相连,且三个铰不在一直线上,则组成几何不变的整体,且没有多余约束。 3. 两个刚片之间的连接方式 规律3 两个刚片用一个铰和一根链杆相连,且三个铰不在一直线上,则组成几何不变的整体,且没有多余约束。
第二章机构的结构分析要点
第一章绪论 1何谓机器,何谓机构?它们有什么区别与联系? 2参照内燃机的机构分析,试对机械手进行分解,说明它是由哪些机构组成的。 3举例说明什么是构件、零件? 第二章机构的结构分析 1什么是运动副、运动副元素、运动链?运动副是如何分类的? 2何谓"高副”和"低副”?在平面机构中高副和低副一般各带入几个约束? 3机构具有确定运动的条件是什么? 4既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束? 5杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构的级别有无影响? 6图所示机构在组成上是否合理?指出其错误所在,并针对错误处更改局部运动副和构件,使之成为合理 的机构。 9试计算图所示凸轮-连杆组合机构的自由度。 7计算图示平面机构的自由度 , 指出复合铰链、局部自由度和虚约束, 在进行咼副低代后, 分析机构级别。 8计算图所示机构的自由度,若有复合铰链、局部自由度或虚约束,应予以指出, 并进行高副低代,确 定该机构的级别。
11试计算图所示齿轮-连杆组合机构的自由度。 12试计算图所示齿轮-连杆组合机构的自由度。 13试确定图所示机构的自由度;并将其中的高副换成低副,确定机构所含的杆组合机构的级别(当取凸 轮为原动件时)。 10在图所示机构中 , AB^EF -CD,试计算其自由度。
14计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别 16根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。设标有 箭头者为原动件,试判断该机构的运动是否确定,为什么? 17计算图示机构的自由度。如有复合铰链、局部自由度、虚约束,请指明所在之处。 18计算图示各机构的自由度。 19 计算图示各机构的自由度。15计算图示机构的自由度,
第二章 机构的结构分析分析
第二章机构的结构分析 §2-1 机构结构分析的内容及目的 1、研究机构的组成及其具有确定运动的条件 目的是弄清机构包含哪几个部分,各部分如何相联,以及怎样的结构才能保证机构中各构件具有确定的相对运动。 2、按结构特点对机构进行分类 不同的机构有各自的特点,把各种机构按结构加以分类,其目的是按其分类建立运动分析和动力分析的一般方法。 3、绘制机构运动简图 研究机构特性的工具。 4.研究机构的组成原理 研究按何种规律组成的机构能满足运动确定性的要求。 §2-2 机构的组成 一、构件与运动副 1、构件(Link) -独立的运动单元。 零件(part)-独立的制造单元,如齿轮。 如图2—1,连杆是由多个零件组成,即一个构件可是一个零件,也可是由多个构件组成的。 2、运动副 运动副-两个构件直接接触组成的能产生某些相对运动的联接。 三个条件,缺一不可,如图2—2所示。 a)两个构件、 b) 直接接触、 c) 有相对运动 运动副元素—直接接触的部分(点、线、面) 图2—2运动副例如:滚动轴承(图2—3)、齿轮齿廓(图2—4)、活塞与缸套(图
2—5)等。 图2—3滑动轴承图2—4齿轮齿廓图2—5活塞与缸套二、运动副的分类: 1.按引入的约束数分类: I级副、II级副、III级副、IV级副、V级副如图2—6所示。 图2—6按引入的约束数对运动副分类 2.按相对运动范围分类: 平面运动副-平面运动, 空间运动副-空间运动。
例如:球铰链(图2—7)、拉杆天线、螺旋(图2—8)、动物关节。 图2—7球铰链图2—8螺旋 平面机构-全部由平面运动副组成的机构,如图2—9。 空间机构-至少含有一个空间运动副的机构如图2—10。 3.按运动副元素分类: ①高副—点、线接触(应力高),例如:滚动副、凸轮副、齿轮副等,如图2—11所示。 图2—11高副 ②低副—面接触,应力低,例如:转动副(回转副)通过柱面接触、 移动副通过平面接触,如图2—12所示。 常用构件和运动副的表示符号如下: 图2—12低副图2—9平面机构图2—10空间机构
§1-1 几何构造分析的7个概念
李其林结构力学 第一章几何构造分析 《结构力学》低分攻略任何一件事情都包含容易的部分和困难的部分,而人的天性是——回避困难! 结构力学中80%是容易的部分,20%是困难的部分; 而作为研究生入学考试,20%困难的部分是考查重点,超过100分; 容易的部分压根不到50分; 考研的复习时间是恒定的。 而大部分同学花大量的时间,甚至都没来得及搞定不到50分的容易部分; 最后没时间复习了… 因为困难的部分,自己看不懂,同学没学过,甚至老师也搞不定; 只能——回避困难——本来就是天性; 所以,有一套能让自己不回避困难的复习资料实在太重要了! 《结构力学》高分攻略 做足够的练习,而不是看足够的题目,困难的地方有老师的视频讲解,你遇到的每一个困难都能在当时搞定, 只有——【李其林结构力学】
第一章几何构造分析 §1-1 几何构造分析的9个概念 §1-2 平面杆件体系的基本组成规律 §1-3 瞬变体系与常变体系的判定 §1-4 计算自由度 §1-5 扩大基础法与等效替代 §1-6 综合练习题 学习说明:本章按照考研的出题规律,分为6节,其中第1、2两节是基本概念和基本规律,第3、4、5节为重点、难点,这三节的知识点往往教材强调不够。这5节里面,每节都有例题和练习题,例题可以先看视频,练习题建议先做题再看视频,相应的练习题就用上面的例题的知识点就可以解决。第6节的综合练习题不再指定用什么方法,需要自己灵活应用前面的多种方法。 祝大家克服难点,学习愉快!
§1-1 几何构造分析的7个概念 1. 几何不变体系和几何可变体系 几何不变体系:在不考虑材料应变的条件下,体系的位置和形状是不能改变的。 几何可变体系:在不考虑材料应变的条件下,体系的位置和形状是可以改变的。 2. 自由度 指完全确定体系位置所需的独立坐标的数目。例如,平面上一个点有2个自由度 ,y,x( 。 )y,x(,平面上一个刚片有三个自由度) 3. 约束 凡是减少体系自由度的装置称为约束。 一根链杆或链杆支座相当于1个约束。 一个单铰或固定铰支座相当于2个约束。 一个刚结点或固定端相当于3个约束。 4. 多余约束 如果在一个体系中增加一个约束,而体系的自由度并不因而减少,则此约束称为多余约束。 5. 瞬变体系 本来是几何可变体系,经过微小的位移后又成为几何不变的体系,称为瞬变体系。如果一个几何可变体系可以发生大位移,则称为常变体系。 6. 瞬铰(虚铰) 从瞬时微小运动来看,两根链杆所起的约束作用相当于在链杆交点处的一个铰所起的约束作用,这个铰可称为瞬铰,有的教材也叫虚铰。要注意的是,瞬铰的位置随着链杆的转动而改变。 7. 无穷远处的瞬铰 如果用两根平行的链杆把刚片与基础相连接,则两根链杆的交点在无穷远处。因此,两根链杆所起的约束作用相当于无穷远处的瞬铰所起的约束作用。 在几何构造分析中应用无穷远处的瞬铰的概念时,可以采用以下4点结论: (1)每个方向都有一个无穷远点。 (2)不同方向有不同的无穷远点。
平面机构的结构分析
第二章平面机构的结构分析 1.填空题: (1)机构具有确定运动的条件是;根据机构的组成原理,任何机构都可看成是由和组成的。 (2)由M个构件组成的复合铰链应包括个转动副。 (3)零件是机器中的单元体;构件是机构中的单元体。 (4)构件的自由度是指;机构的自由度是指。 (5)在平面机构中若引入一个高副将引入个约束,而引入一个低副将引入个约束,构件数、约束数与机构自由度的关系是。 (6)一种相同的机构组成不同的机器。 A.可以 B.不可以 (7)Ⅲ级杆组应由组成。 A.三个构件和六个低副; B.四个构件和六个低副; C.二个构件和三个低副。 (8)内燃机中的连杆属于。 A.机器 B.机构 C.构件 (9)有两个平面机构的自由度都等于1,现用一个有两铰链的运动构件将它们串成一个平面机构,这时自由度等于。 A .0 B.1 C.2 (10)图1.10所示的四个分图中,图所示构件系统是不能运动的。 2.画出图1.11所示机构的运动简图。
3.图1.12所示为一机构的初拟设计方案。试求: (1)计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。 (2)如此初拟方案不合理,请修改并用简图表示。 4.计算图1.13所示机构的自由度,判断是否有确定运动;若不能,试绘出改进后的机构简图。修改的原动件仍为AC杆(图中有箭头的构件)。 5.计算图1.14所示机构的自由度。 6.计算图1.15所示机构的自由度。
7.计算图1.16所示机构的自由度。 8.判断图1.17所示各图是否为机构。 9.计算图1.18所示机构的自由度。 10.计算图1.19所示机构的自由度。 11.计算图1.20所示机构的自由度。已知CD=CE=FE=FD,且导路H,J共线,L和G共线,H,J的方向和L,G 的方向垂直。机构中若有局部自由度,虚约束或复合铰链,应指出。
结构力学-几何构造分析
1.图示体系是几何不变体系。() 2.有多余约束の体系一定是几何不变体系。() 3.图示体系是: A.几何瞬变有多余约束; B.几何不变; C.几何常变; D.几何瞬变无多余约束。() 4.在不考虑材料の条件下,体系の 位置和形状不能改变の体系称为几何体系。() 5几何组成分析中,在平面内固定一个点,需要。 6图示体系是体系,因为 。 7联结两个刚片の任意两根链杆の延线交点称为,它の位置是定 の。 8试对图示体系进行几何组成分析。 C D B 9对图示体系进行几何组成分析。 A C D B E 10对图示体系进行几何组成分析。 C D B 11对图示体系进行几何组成分析。A B C D E F 12对图示体系进行几何组成分析。 A B C D E F 13对图示体系进行几何组成分析。B C D E F A G 14对图示体系进行几何组成分析。 A B C D E 15对图示体系进行几何组成分析。
A B C D E 16对 图 示 体 系 进行 几 何 组 成 分析 。 A B C D G E F 17对 图 示 体 系 进 行 几 何 组 成 分 析 。 A B C D E F G H K 18对 图 示 体 系 进 行 几 何 构 造 分 析 。 19对 图 示 体 系 进 行 几 何 构 造 分 析 。 20对 图 示 体 系 进 行 几 何 构 造 分 析 。 21对 图 示 体 系 作 几 何 构 造 分 析 。 22对 图 示 体 系 进 行 几 何 组 成 分 析 。( 图 中 未 编 号 の 结 点 为 交 叉 点 。) A C B D E F 23对 图 示 体 系 进 行 几 何 组 成 分 析 。 A B C D E F 24三 个 刚 片 用 三 个 铰 两 两 相 联 时 の 瞬 变 原 因 是_________________________。 25图 示 体 系 按 三 刚 片 法 则 分 析 , 三 铰 共 线 , 故 为 几 何 瞬 变 体 系 。 ( ) 26图 示 体 系 为 几 何 不 变 有 多 余 约 束 。 ( ) 27图 示 体 系 为 几 何 瞬 变 。 ( ) 28图 示 对 称 体 系 为 几 何 瞬 变 。 ( )
第二章结构的几何组成分析.
第二章 结构的几何组成分析 儿何构造分析的日的主要是分析、刿断一个休系是否儿何可变,或者如何保证它成为几何不变体系,只有几何不变体系才可以作为结构。 § 2-1几何构造分析的几个概念 一、几何不变体系和几何可变体系 儿何町变休系:不考虑材料应变条件下,体系的位置和形状可以改变的体系。
三、约束 对物体的运动起限制作用的其他物体称为约束(联系),体系 的自山度可因加入联系而减少,能减少一个自由度的装置称为 一个联系。常川的联系勺琏杆和饺。 1根链杆一1个约束 K 1个单铁一2个约束 \ 连接3个刚片的复铁一1个约束,即2个m? 饺连接n个刚片的父较一5?1)个单钱 1个单刚结点一3个约東 连接3个刚片的复刚结点一6个约束,即2个单刚结点 连接n个刚片的父刚结点一(ml)个m?刚结点
W=3X 4 — (2X4 +3)= 1 W = 3 X 7 — (2X9+3) = 0 四、多余约束 分消必要约束和非必要约束。 如果在一个体系中增加一个约柬,而体系的门山 Ji£ )[不因此ifU 减少,此约束称为多余约束。 五、平面杆件体系的计算自由度 1:1 W=3m- (2〃+3x+〃 协…刚片数: …单饺总数; g …讯刚Yj 点总数; 尸…连杆总数。 9-2X (2) =5 6-2X (1) =4 zz/=7 /I-9 r= 3 加=4 // — 4 r= 3
?!5 w = 3 X4 —( 3 X4+3)= — 3 W = 3 X4 —(3X4+2)=— 2 超f 浄疋衍豹 W=3x 4 — (2X 4+ 3)= 1 也=4 力=4 r= 3 IV > 0 体系儿何町变; W =0 无多余约束时,体系儿何不变; W <0 体系冇名余约束。 XJ2 —(2 XI6+4) =0
第二章 结构的几何组成分析
第2章结构的几何组成分析 1. 教学内容 一个体系要能承受荷载,首先它的几何构造应当合理,能够使几何形状和位置保持不变。因此,在进行结构受力分析之前,先进行几何构造分析。 在几何构造分析中,最基本的规律是三角形规律。规律本身是简单浅显的,但规律的运用则变化无穷。因此,学习本章时遇到的困难不在于学懂,而在于灵活运用。 本章在全书中只是一个短小的前奏,只是从几何构造的角度讨论建筑力学中的一个侧面,根本不涉及到内力和应变。但是构造分析与内力分析之间又是密切相关的,本章内容将在后面许多章节中得到应用。 2. 教学目的 理解自由度、可变体系与不变体系、瞬变体系、瞬铰的概念; 正确理解三角形规律,并能熟练应用三角形规律分析平面体系的几何构造; 掌握计算自由度的计算方法,能计算一般平面体系的自由度。 3. 重难点 重点:理解自由度、可变体系与不变体系、瞬变体系、瞬铰的概念,应用三角形规律分析平面体系的几何构造 难点: 熟练应用三角形规律分析平面体系的几何构造 3. 本章目录 第一节、基本概念(包括:几何不变体系和几何可变体系、几何组成分析中的几个概念、自由度) 第二节、平面几何不变体系的组成规律 第三节、平面体系几何组成分析举例
第四节、结构的几何组成和静定性的关系 第五部分、作业 4. 参考章节 《建筑力学》,第十章、结构的几何构造分析,pp.145-153。 第一节、基本概念 1. 教学要求 理解自由度、几何可变体系与几何不变体系、瞬变体系、瞬铰的概念。 2. 本节目录 ?1. 几何不变体系和几何可变体系 ?2. 运动自由度 S ?3. 约束 ?4. 多余约束和非多余约束 ?5. 瞬变体系 ?6. 瞬铰和无穷远处的瞬铰 ?7. 思考与讨论 3. 参考章节 《建筑力学》,pp.11-14。 2.1.1 几何不变体系和几何可变体系 几何不变体系:体系的位置和形状是不能改变的(图2-1b)。 几何可变体系:体系的位置或形状是可以改变的(图2-1a)。 以上讨论的前提:不考虑材料的应变。
2机构的结构分析习题
第二章机构的结构分析作业 学号姓名 一、填空题 1.组成机构的要素是和。 2.从机构结构观点来看,任何机构都是由、、 三部分组成。 3.两构件之间以线接触所组成的平面运动副称为副,它产生个约束,而 保留了个自由度。 4.平面运动副的最大约束数为,最小约束数为。 5.机构具有确定的相对运动条件是原动件数机构的自由度。 6.在右图所示平面运动链中,若构件1为机架,构件5为原动件,则成为级机构;若以构件2为机架,3为原动件,则成为级机构。 二、选择题 1.一种相同的机构组成不同的机器。 A可以B不能 2.机构中的构件是由一个或多个零件所组成,这些零件间产生任何相对运动。 A可以B不能 3.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一 个平面机构,则其自由度等于。 A0B1C2 4.原动件的自由度应为。 A-1B1C0 5.基本杆组的自由度应为。 A-1B1C0 6.高副低代中的虚拟构件及其运动副的自由度应为。 A-1B+1 C0D6
7.在机构中原动件数目机构自由度时,该机构具有确定的运动。 A小于B等于C大于 8.计算机构自由度时,若计入虚约束,则机构自由度就会。 A增多B减少C不变 9.构件运动确定的条件是。 A自由度大于1B自由度大于零C自由度等于原动件数 10.渐开线齿轮机构的高副低代机构是一铰链四杆机构,在齿轮传动过程中,该四杆机构的。 A两连架杆的长度是变化的B连杆长度是变化的 C所有杆件的长度均变化D所有杆件的长度均不变 三、计算分析题 1.请你画出一把直柄雨伞的机构运动简图。 2.请画出下列机构的运动简图,并计算其自由度。
西北工业大学 航空学院 结构力学答案 第二章 结构的几何组成分析
第二章结构的几何组成分析 2-1分析图2-27所示平面桁架的几何不变性,并计算系统的多余约束数。 (a) (a)解:视杆为约束,结点为自由体。 C=11,N=7×2=14 f =11-7×2+3=0 该桁架布局合理,不存在有应力的杆,故为无多余约束的几何不变系。 (b) (b)解:视杆和铰支座为约束,结点为自由体。 C=9+2+1=12,N=6×2=12 f =12-6×2=0 该桁架布局合理,不存在有应力的杆,故为无多余约束的几何不变系。 (c) (c)解:视杆和铰支座为约束,结点为自由体。 C=10+2×2=14,N=6×2=12 f=14-12=2 该桁架为有两个多余约束的几何不变系。
12 17 (d) (d)解:视杆和铰支座为约束,结点为自由体。 C =30+3=33,N =17×2=34 f=33-34=-1 故该桁架为几何可变系。 (e) (e)解:视杆为约束,结点为自由体。 C =13,N =8×2=16 f=13-16+3=0 将1-2-3-4、5-6-7-8看作两刚片,杆3-6、杆2-7、杆4-5相互平行,由两刚片原则知,为瞬时可变系统。 6 (f) (f)解:视杆和固定铰支座为约束,结点为自由体。 C =22+3×2=28,N =14×2=28 f=28-28=0
将12-13-14、7-11-12、1-2-3-4-5-6-7-8-9-10看作三刚片,三刚片由铰7、铰12、铰14连结,三铰共线,故该桁架为瞬时可变系统。 (g) (g)解:视杆和固定铰支座为约束,结点为自由体。 C=24+4×2=32,N=16×2=32 f=32-32=0 由于杆15-14-3、杆12-11-4、杆9-5相交于一点,故该桁架为瞬时可变系。 (h) (h)解:视杆和固定铰支座为约束,结点为自由体。 C=12+2×2=16,N=8×2=16 f=16-16=0 该桁架布局合理,加减二元体之后,无有应力的杆,故该桁架为无多余约束的几何不变系。 2-2分析如图所示平面刚架和混合杆系的几何不变性,计算系统的多余约束数。 (a) (a)解:视杆和铰支座为约束,结点为自由体。其中杆1-2、杆3-4为复连杆。 C=3×2+2+4=12,N=6×2=12 f=12-12=0 故该系统为几何不变系。
第二章几何组成分析习题
几何组成分析试题 一、是非判断: 1.在一个平面体系上增加二元体不会改变体系的计算自由度。( ) 2.若平面体系的计算自由度W =0,则该体系为无多余约束的几何不变体系或瞬变体系,而不可能为常变体系。( ) 3.平面铰接杆件体系的计算自由度W=2j-b-r ,式中j 表示体系中的单铰的个数。( ) 4.若平面体系的计算自由度W<0,则该体系不可能是静定结构。( ) 5.图题1-1(a)所示体系去掉二元体AB 、AC 后,成为图(b)的几何可变体系,故原体图(a)系为几何可变体系。( ) 题1-1图 6.图题1-2(a)所示体系依次去掉二元体AB 、AC 及BD 、BE 后,成为图(b)所示体系,故原体系是无多余约束的几何不变体系。( ) 7.图题1-3(a)所示体系,刚片AB 、CD 之间只用链杆1、2相连,故为几何可变体系。( ) 题1-2图 题1-3图 8.图题1-4(a)所示体系,依结点1、2、3、4的顺序去掉4个二元体后,就只剩下地基,故原体系是无多余约束的几何不变体系。( ) 题1-4图 题2-1图 题2-2图 二、填空 1.如图2-1所示体系为具有 个多余约束的几何不变体系。 2.如图2-2所示体系为 体系。 3.如图2-3所示体系为 体系。 题2-3图 题2-4图 题2-5图 (a) (b) A B C A B D E C C D A B C D 1 2 (a ) (b ) 1 2 3 4 1 2 3 4 Ⅰ Ⅱ Ⅲ
4.如图2-4所示刚片Ⅰ、Ⅱ、Ⅲ由铰A 及链杆1、2、3、4连接,若铰A 与及链杆1共线,则所组成体系为 体系;若铰A 与及链杆1不共线,则所组成体系为 体系。 5.如图2-5所示体系为 体系。 题2-6图 题2-7图 题2-8图 6.如图2-6所示体系为 体系。 7.如图2-7所示体系为 体系。 8.如图2-8所示体系为 体系。 三~五、试对图三~五所示体系进行几何组成分析。 题三图 题四图 题五图 六、填充题 1 几何构造分析的目的有三:其一是检查所给体系的__________特性,其二根据几何构造的次序寻求__________分析的途径,其三是超静定次数确定。 2 平面体系可分为几何可变与几何不变体系。其中几何可变体系又分为________体系和________体系两种。静定与超静定结构均属于________体系。 3 在 不 考 虑 材 料 _______ 的 条 件 下 ,体 系 的 位 置 和 形 状 不 能 改变 的 体 系 称 为 几 何 _______体 系 。 4 几 何 组 成 分 析 中 ,在 平 面 内 固 定 一 个 点 ,需 要 ________________________。 5 联 结 两 个 刚 片 的 任 意 两 根 链 杆 的 延 线 交 点 称 为 _______,它的 位 置 是 _____定 的 。 A B C A B C D F E