RFID定位技术研究
GPS 定位系统在进行室内定位时存在固有的定位精度问题,所以必须通过其他定位
技术解决室内定位问题,如红外线、802.1l 、超声波和RFID 等等,这些系统各有优缺点。其中RFID 技术由于其非接触和非视距等优点已成为优选的定位技术,RFID 系统可以在几毫秒内得到厘米级定位精度的信息,其传输范围很大,成本较低,因此备受关注。
RFID 定位与跟踪系统主要利用电子标签对物体的唯一标识特性,依据读写器与安装
在物体上的标签之间射频通信的信号强度(RSSI)或信号到达时间差(TDOA)来测量物品的空间位置,主要应用于GPS 系统难以奏效的室内定位领域。
1.基于测距的RFID 定位算法
1.1 TOA
1) 原理: 通过获得发射机发射的信号到达目标再返回发射机的时间,由传播时间得出标签
到阅读器的距离。然后根据三边定位法或多边定位法解出目标标签的位置。
2) 优点:定位精度高。
缺点:该算法要求标签和阅读器要同步,其次环境的复杂性会导致多径效应并降低系统
的定位精度。
TOA 定位算法是基于TOA 圆周方程,通过圆与圆之间交线的不同组合,构造出
不同的定位方程[1]。从几何模型上分析,如果移动台s 到基站i 的信号在视距情况
下传播,测得的距离为Di ,移动台一定位于以基站i 为圆心,Di 为半径的圆周上,
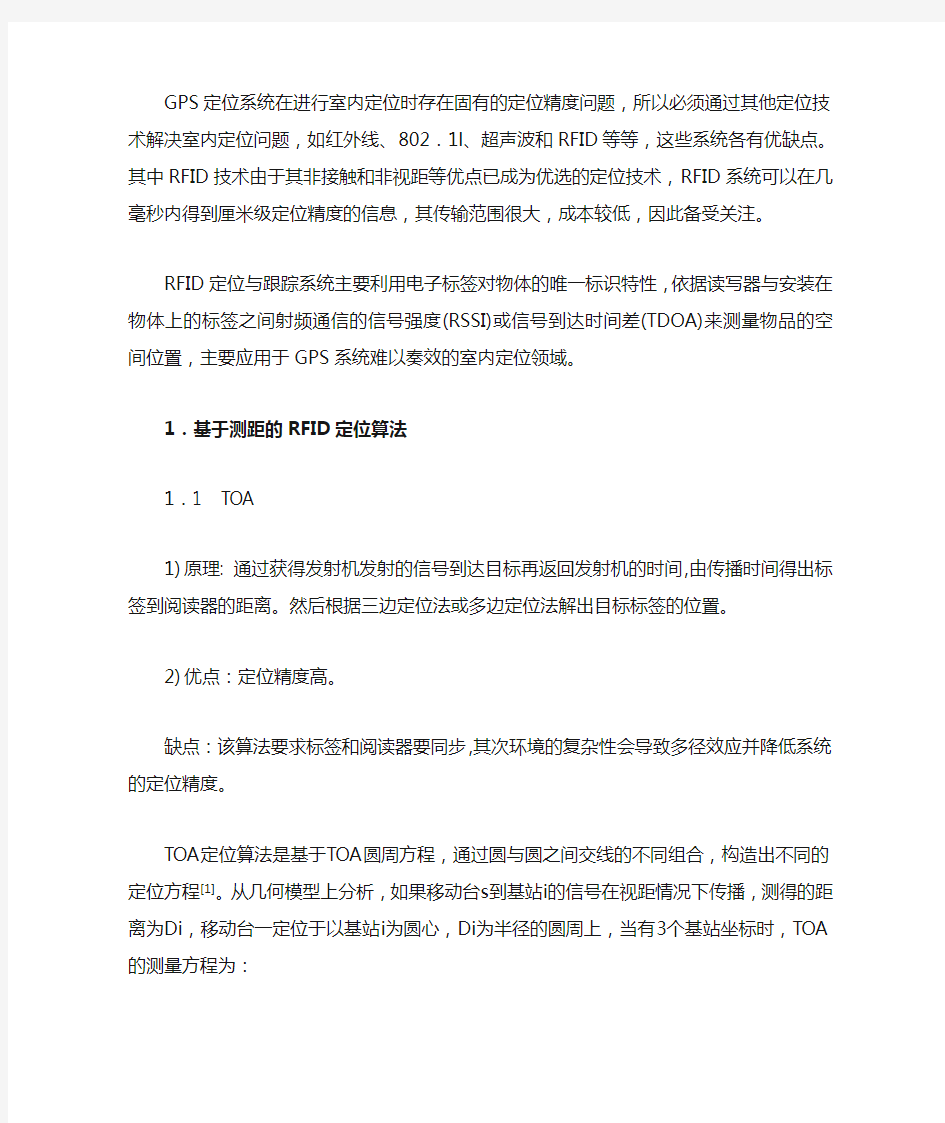
当有3个基站坐标时,TOA 的测量方程为: Di=()()22x xs yi ys i -+- , (1)
i=1,2,3 。
式中,(xi ,yi )为第i 个基站的坐标,(xs ,ys )为移动台s 的坐标。
其几何图形如图1所示。
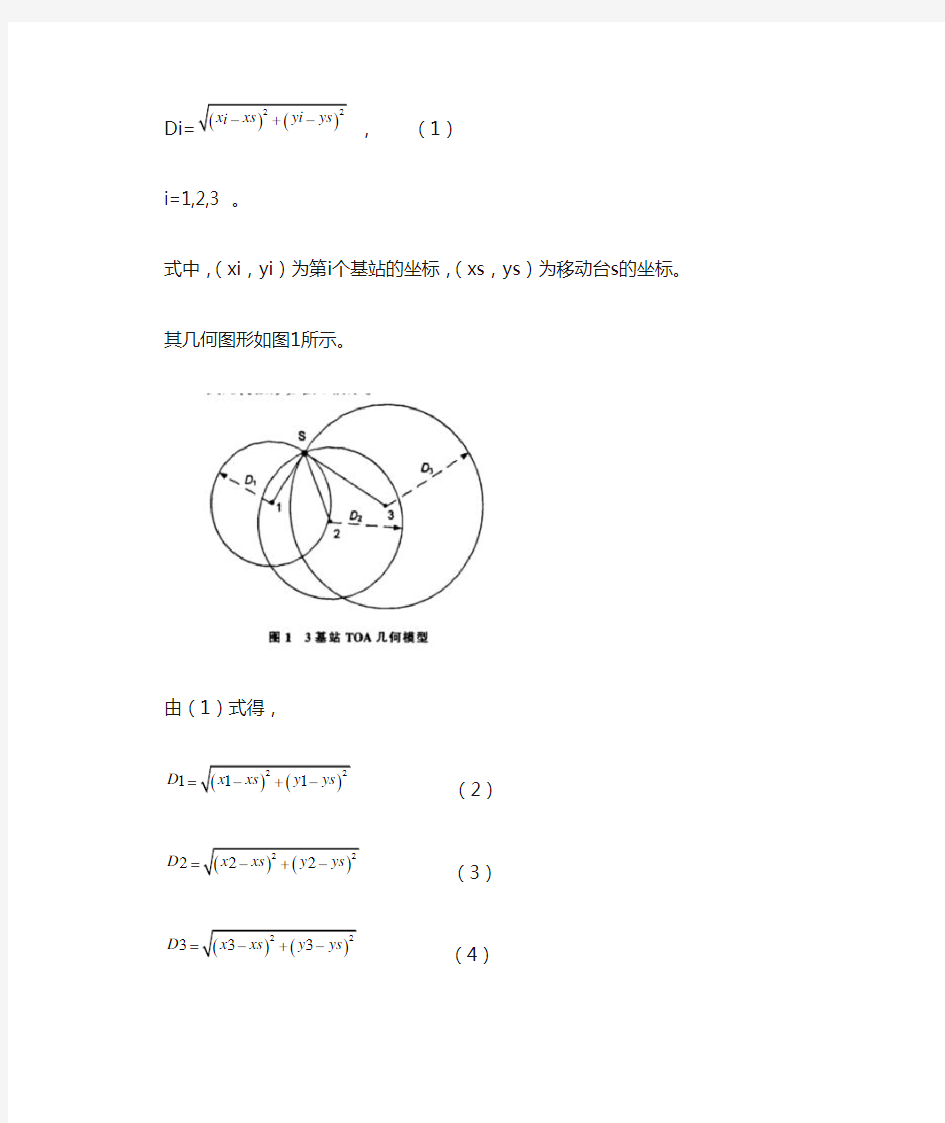
由(1)式得, ()()22111D x xs y ys =
-+- (2) ()()22222D x xs y ys =
-+- (3) ()()22
333D x xs y ys =-+- (4) 由(2)-(3)可得相交线方程为,
()()()()212112*22*21*11*11*12*22
x x xs y y ys x x y y x x y y D D D D -+-=
+-++-???? (5) 同理,基站2基站3两圆交点的相交线方程为:
()()()()323213*33*32*22*22*23*32
x x xs y y ys
x x y y x x y y D D D D -+-=+-++-???? (6) 虽然可以用相同的方法得到基站1和基站3的相交线方程,但由于第3条交线同样
会经过前2条交线的相同点,因此,只需求得3条交线其中2条的方程,便可联立
解出交点坐标。
联立方程(5)、方程(6),得:
()()()()()()21*332*132212132y y C y y C xs x x y y x x y y ---=-----????
(7) ()()()()()()21*332*132212132x x C x x C ys y y x x y y x x ---=-----????
(8) 其中,
()()112*22*21*11*11*12*22C x x y y x x y y D D D D =+-++-???
?, ()()133*33*32*22*22*23*32
C x x y y x x y y
D D D D =+-++-????. 值得注意的是:在二维平面定位系统中,最少基站数为3个。当基站数大于3时,
可以通过最小二乘法求解方程组。
1.2 TDOA
1) 原理:是对TOA 算法的改进,在不同的测量点同步发射信号,通过计算不同节点到
达目标的距离差来定位。
2) 优点:定位精度高。两个节点在时间上不需要同步,而且解决了硬件延迟问题。
缺点:要求所有阅读器同步,此外阻挡物和空间的复杂性使得阅读器可能接收不到
标签发出的信号。还会受到多径和噪声的影响。
基于信号到达时间差TDOA 的定位,其主要的定位方法为双曲线定位法。
双曲线定位法的原理是利用双曲线的特性,即双曲线上的点到两焦点距离之差为
定值。双曲线定位法是基于TDOA 的定位方法,其观测值也是时间,但不同于
TOA 定位,其定位依据是标签到几个不同阅读器的传播的时间差。由几何原理可
知,至少需要三个阅读器才能得到唯一满足要求的双曲线交点,从而可得标签所
在位置[2]。
我们用三个已知位置的阅读器Reader1、Reader2、Reader3 来定位标签。
如图2所示,我们要测出在同一时刻,目标标签到各个阅读器的距离,因
此要求每个阅读器时钟一定要同步,否则计算出来的误差很大,不能很好
地反映目标标签的实际位置。其中可以测量出阅读器 Reader1,Reader2 与
标签之间的距离差,其方法是让两个阅读器同时发出的一个信号,则两个
信号到达目标标签的时间不同,从而存在一个时间差,设为21t 。则距离差
为21R =c*21t ,其中,c 为电磁波在自由空间中的传播速度。由我们已经学
过的几何知识可知,在已知Reader1,Reader2 和标签之间的距离差时,标
签必定位于以Reader1,Reader2为焦点并且与两焦点距离差为21R 的双曲
线对上。当又已知阅读器 Reader1 , Reader3 与标签的距离差31R =c*31t 时,
可得到另一组以两阅读器 Reader1 和 Reader3 为焦点、与该两个焦点距
离差为31R 双曲线对上。由此可知,两组双曲线的交点就是标签的位置所在。
图2基于TDOA 的双曲线定位方法
已知目标标签的坐标(x0,y0)和三个阅读器的坐标(x1,y1),(x2,y2),(x3,y3)有如下关系: ()()()()()()()()()()()()()()()()2102*0202*0201*0101*013103*0303*0301*0101*01R x x x x y y y y x x x x y y y y R x x x x y y y y x x x x y y y y ?=-----------???=-----------? 解方程组可以得到两个不同的解,也就是图2中所得到的两对双曲线的两个交点,这两个交点中只有一个代表了标签的位置坐标,由标签在阅读器围成的三角形内来消除模糊解得出标签位置的真实值。
此方法计算量较大,并且要求阅读器之间要在通信上有良好的协调。总之,基于TDOA 的RFID 定位,虽然避免了阅读器和标签计时不同步给定位带来的误差,但对系统计时精度的要求仍然较高[3],应用受限。
1.3 AOA
1) 原理:是对TOA 算法的改进,在不同的测量点同步发射信号,通过计算不同节点
到达目标的距离差来定位。
2) 优点:定位精度高。
缺点:由于要加阵列天线,成本高。
信号到达角度定位法AOA(angle of arrival)通常是基于几组阅读器(最少两组),
通过计算应答器反射信号与阅读器的夹角,然后结合两组阅读器之间的距离,
完成对应答器的定位。基于信号到达角度定位方法具有成本低,易实现,抗干
扰能力强,原理简单等优点。基于信号到达角度的RFID 定位方法所用的应答器
即可以是有源应答器,也可以是无源应答器。
基于信号到达角度定位方法的RFID 定位系统信号处理任务后再将射频信号
反射回阅读器。如图3所示,假定标签在天线主要采用如下的工作方式:阅读器
发出射频信号,该信号到达应答器,标签与天线之间的距离远大于天线阵列元
的间距,则标签的信号到达天线处可以看作平面波,若已知天线阵列元之间的
间距,阵列组间距离,根据三角函数算法可得,α= arccos 2
d l θ??? ???π,其中α为到达信号与天线的夹角,d 为相邻两个天线的距离,θ?为接收到信号的相位
差,l 为信号调制到低频后阅读器输出的正弦波的波长。因此要求得到达信号
夹角α,需要知道相邻两个天线收到信号的相位差θ?。在求得返回信号和阅
读器的夹角后,利用三角函数算法得到相应的坐标公式,然后就可求得标签在
空间的坐标。该定位的数据计算可以由相关的定位算法程序完成。它不用改变
用于读写识别的常规阅读器和应答器的硬件结构,只需外接A/D 转换器,由相
关定位算法程序通过计算应答器反射信号与阅读器的夹角,最终完成对应答器
的定位。
定位过程包括如下几个步骤:
(1) 阅读器经发送天线发出射频信号;
(2) 目标应答器利用应答器天线接收阅读器发送的射频信号,信号处理完
毕后采用调制后的射频信号返回阅读器;
(3) 阅读器对高频信号进行调制解调,输出解调后的低频正弦波信号;
(4) AD 转换器对阅读器发送的正弦波信号进行均匀采用,将采用得到的
电压转换为数字量,将转换后的数字量发送到计算机,由计算机根
据表征信号的数字量,得到相邻两个天线接收到的正弦波的波程差,
结合三角函数算法计算应答器发射信号与阅读器的夹角,再根据天
线的距离,得到应答器的坐标值数学表达式,应答器定位完成。
如图4所示为4倍频采用示意图,A/D 转换器对阅读器发送的正弦波
信号均匀采样是指,使一个A/D 转换器在同一采样时钟控制下对相
邻两个天线收到信号进行4倍频采样,得到两个天线收到信号中先到
达信号的采样值:
1sin I λ=,1=sin +4T Q λ?? ??
? (1) 后到达信号的采样值:
2sin I μ=,2=sin +4T Q μ?? ??
? (2) 分别求出两路信号的合成矢量角度111
=arctan Q I θ,222=arctan Q I θ,进而求出相邻两个天线收到信号的相位差12=-θθθ?,当信号波长
为L 时,将相邻信号的波程差用相位差θ?表示出来,即波程差
d*cos α=L*2θ?π,可以得到=arccos 2d L θα??? ???
π。 如图5所示为计算标签坐标示意图,与阅读器相连接的四个用于收发
射频信号的天线每相邻两个组成一个天线阵列,共两个天线阵列,
假设其中一个天线阵列的坐标为(0,0),另一个天线阵列的坐标为
(0,h ),两个参考标签测得目标标签信号入射角分别为α和β,则
根据三角函数计算,目标应答器的位置为:
(x=
h cot +cot αβ,y=h cot cot +cot βαβ
)。
图3 AOA方法示意图
图4 相邻信号4倍频采样示意图
图5 定位系统中计算标签坐标示意图
1.4 RSSI
1) 原理:利用已知发射信号强度和接受节点收到的信号强度,计算在传输过程的损
耗,使用信号模型将损耗转化为待定位标签与已知位置阅读器之间的距离。待定
标签的位置是以阅读器为圆心估算距离为半径的圆上。最后多个阅读器的圆之
交点就是目标标签的位置。
2) 优点:可以很容易地搭建RFID 定位系统。
缺点:定位精度不高,读写器在接受信号时很容易受到干扰。由于阻挡物多,存在
非常严重的非视距效应。
此定位方法在定位过程中需要经历两个阶段:
(1)数据收集阶段:具体步骤如下,在阅读器的工作范围内,取n 个位置已知
的定点作为参考点,然后再把n 个静态标签依次摆放在这些参考点上。再用RFID
定位系统中的m 个阅读器分别去接收标签发来的信号强度设为(L1,L2,L3,
……,Lm )。然后,把这个m 个阅读器接收到的信号强度和静态标签的坐标位置等
信息一并发往后台处理数据的系统中。后台处理信息的系统为这些参考点建立
数据库(L1,L2,L3,……,Lm ,xi ,yi )(i ≤n ),由此可知,这是一个极其繁
琐的积累数据的过程,静态参考点的位置的选取和数量的多少在很大程度上决
定了物体定位的精度。
(2)数据处理阶段:当待定位的目标标签进入阅读器工作区域的某一位置时,
目标标签将会把信号强度123m l l l l (,,,...,)
等信息发送给正在工作的m 个阅读器,阅读器再把这些数据发送给后台系统进行数据处理并输入数据库。数
据库将该值依次与第一阶段得到的每条数据记录
123m i i (L ,L ,L ,...,L ,x ,y )()i n ≤做如下处理: ()()()()2222
112233...m m R L l L l L l L l =-+-+-++- (5) 根据式(5)求出的R 值中,找出最小的K 条记录,这K 个值的位置
坐标的均值就是估算出来的目标标签的坐标位置。
如图5所示,把三个阅读器Reader1、Reader2、Reader3 分别放在三个
坐标位置已知的定点上。根据目标标签到达阅读器的电波功率,我们可
以计算出目标标签到三个阅读器的距离为D 1、D 2、D 3。目标标签就是在
以三个阅读器为圆心,以D 1、D 2、D 3 为半径的圆的交点处。
图5 基于信号强度的定位方法
2基于非测距技术的RFID定位算法
DV-hop定位算法
DV - Hop 定位算法有三个阶段,
第一阶段:使用典型的距离矢量交换协议,使用网络中所有节点获得其与标签节点之间的跳数。
第二阶段:在获得其他锚节点位置信息和跳数信息之后,锚节点计算网络平均每跳距离,然后将其作为一个跳距校正值广播至网络中。当接收到校正值后,节点用该校正值乘以到附近个锚节点之间的跳数估计欧式距离。
第三阶段:当未知节点获得与三个或更多个锚节点的欧式距离,利用最大似然估计或者三边测量法计算自身坐标。其原理图如图1 所示。
图1 DV-hop定位算法
已知标签点A、B、C 之间的距离和跳数,A 的校正值为(40 +50) \(3 +6) =10 在图2 中假设D 从A 获得校正值,则它与三个标签点的距离分别为A:10?2 = 20 B:10?3 = 30 C:10?4 =40. 然后使用三边测量法确定D 的位置。DV - Hop 定位算法的优点是不受测距误差的影响,但仅适用于各项同性的均匀网络。
APIT定位算法
APIT 的基本算法是从待定位节点周围的锚节点中任意选取三个,组成一个三角形,判断该点是否位于三角形内。如在三角形内,将其标记并依次对待定位节点周围的锚节点进行各种组合去检测,最终找出所有满足要求的三角形重叠区域,其质心位置代替待定位节点位置。算法原理如图2。
图 2 APIT 定位原理示意图
APIT 定位算法主要应用的是最佳三角形内点测试法(PIT 法)。主要原理是假设对于构成三角形的三个顶点A、B、C 来说,如果存在一个方向,点M 沿着这个方向移动会同时远离或者接近三个顶点,那么该点就在三角形外,否则在三角形内。原理图如图3所示。
图3 PIT原理图
APIT 定位算法的优点是定位精度高,性能稳定,对信标节点分布要求低,但是每个节点都需要一定数量的信标节点进行测试,所以对信标节点密度要求很高,计算量较大。
凸规划算法
凸规划定位算法的主要思想是将节点间点到点的通信连接视为节点位置的几何约束,把整个网络模型化为一个凸集,因此节点问题就转变成了凸约束优化问题。然后使用半定规划和线性规划得到一个全局优化的解决方案,确定节点位置。同时也可以计算出未知节点可能存在的区域,根据位置节点与锚节点之间的通信连接和节点射程,计算未知节点可能存在的矩形区域,然后把矩形的质心位置当做位置节点的位置。具体原理图如图5所示。
3RFID定位算法面临的问题与挑战
由上述内容我们知道,每种算法都有各自的优缺点和适用范围,也没有哪一种算法是适用
于各种定位系统的。在现有的定位算法的基础上科研人员也提出了很多改进的算法,比如说改进的DV - Hop 定位算法,改进和传统的算法区别在于对平均跳距的估计,用Min - Max 代替了最小二乘法以及对最初定位结果的进一步修正。改进算法在不增加节点的基础上,定位精度明显提高且算法简单计算量小。但是不论是传统的定位算法还是改进的定位算法还主要面临着以下一些问题:一是定位精度依赖于网络部署条件,例如DV -Hop 仅适用于密集部署的各向同性网络;而凸规划定位算法要求锚节点必须部署在网络的边缘。二是没有对距离或角度测量误差采取措施,因此会造成误差传播和误差积累,定位精度由距离或角度测量的精度决定。三是在现有的算法中还有人提出循环求精算法,虽然可以明显减少误差,但是这类算法对循环次数没有一个准确的估计,无法计算其运算量,不仅增加了算法的不确定性而且增加了节点能耗。
[1] 陈健,卓永宁.一种基于TOA的定位优化算法.工程实践及应用技术.2010年第36卷第4期.
[2] 刘保卫.基于RFID原理的交通目标搜索与定位技术研究[D].大连:大连理工大学,2007.
[3] 俞丽娜,曾连荪,金志华.基于TDOA的无线定位算法研究及精度分析[J].计算机测量与控制,2006, 14(9):1247-1248.