【CN209676340U】三轴云台摄像头结构【专利】
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920272992.1
(22)申请日 2019.03.04
(73)专利权人 李佳
地址 518000 广东省深圳市罗湖区凤凰路
181号凤凰印象花园24A
(72)发明人 李佳
(74)专利代理机构 深圳中一联合知识产权代理
有限公司 44414
代理人 蔡鹏娟
(51)Int.Cl.
H04N 5/225(2006.01)
F16M 11/10(2006.01)
F16M 11/08(2006.01)
F16M 11/18(2006.01)
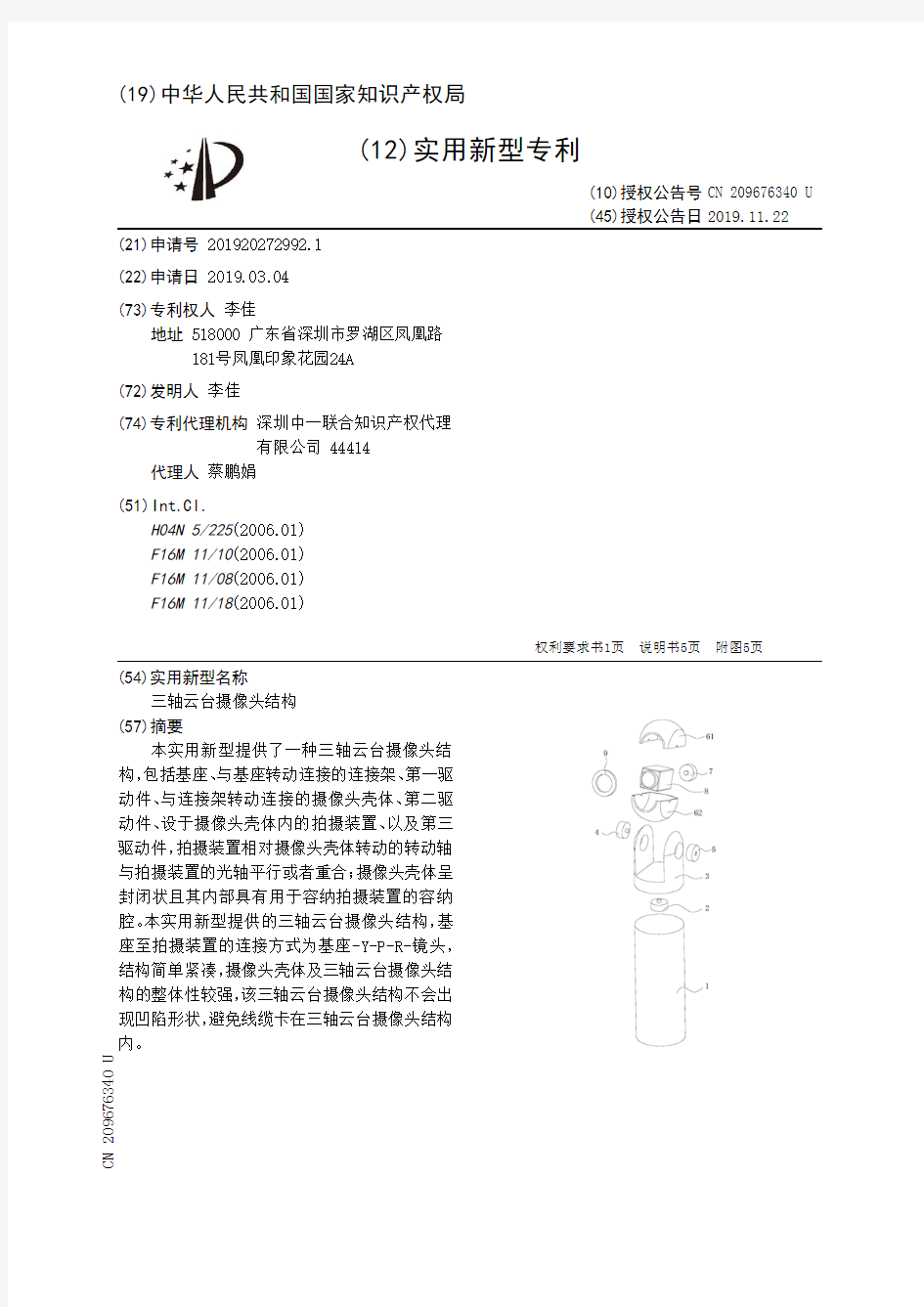
(54)实用新型名称三轴云台摄像头结构(57)摘要本实用新型提供了一种三轴云台摄像头结构,包括基座、与基座转动连接的连接架、第一驱动件、与连接架转动连接的摄像头壳体、第二驱动件、设于摄像头壳体内的拍摄装置、以及第三驱动件,拍摄装置相对摄像头壳体转动的转动轴与拍摄装置的光轴平行或者重合;摄像头壳体呈封闭状且其内部具有用于容纳拍摄装置的容纳腔。本实用新型提供的三轴云台摄像头结构,基座至拍摄装置的连接方式为基座-Y -P -R -镜头,结构简单紧凑,摄像头壳体及三轴云台摄像头结构的整体性较强,该三轴云台摄像头结构不会出现凹陷形状,避免线缆卡在三轴云台摄像头结构
内。权利要求书1页 说明书5页 附图5页CN 209676340 U 2019.11.22
C N 209676340
U
权 利 要 求 书1/1页CN 209676340 U
1.三轴云台摄像头结构,其特征在于:包括基座、与所述基座转动连接的连接架、用于驱动所述连接架相对所述基座偏航旋转的第一驱动件、与所述连接架转动连接的摄像头壳体、用于驱动所述摄像头壳体相对所述连接架俯仰转动的第二驱动件、设于所述摄像头壳体内的拍摄装置、以及用于驱动所述拍摄装置相对所述摄像头壳体翻滚转动的第三驱动件,所述拍摄装置相对所述摄像头壳体转动的转动轴与所述拍摄装置的光轴平行或者重合,且所述摄像头壳体呈封闭状且其内部具有用于容纳所述拍摄装置的容纳腔。
2.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述连接架为U形支架,所述U形支架包括底部、以及分别连接于所述底部两侧的两个侧部,所述底部与所述第一驱动件连接,所述摄像头壳体夹设于两个所述侧部之间,且所述摄像头壳体的转动轴线穿过两个所述侧部设置。
3.如权利要求2所述的三轴云台摄像头结构,其特征在于:所述第一驱动件的输出轴与所述底部固定连接,且所述U形支架的转动轴穿过所述底部的中心及所述基座的中心设置。
4.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述拍摄装置与所述摄像头壳体可拆卸连接。
5.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述拍摄装置上设有姿态传感器。
6.如权利要求2所述的三轴云台摄像头结构,其特征在于:两个所述侧部上均开设有第一通孔,所述第二驱动件的输出轴穿过其中一个所述第一通孔且与所述摄像头壳体固定连接,另一个所述第一通孔中设有第一轴承,所述第一轴承与所述摄像头壳体固定连接。
7.如权利要求6所述的三轴云台摄像头结构,其特征在于:所述摄像头壳体包括第一平面、第二平面、以及连接所述第一平面和所述第二平面的弧面,所述第一平面和所述第二平面相互平行,所述第一平面和所述第二平面分别与两个所述侧部正对设置,所述第一平面与所述第二驱动件的输出轴固定连接,所述第二平面与所述第一轴承固定连接。
8.如权利要求2所述的三轴云台摄像头结构,其特征在于:所述摄像头壳体相对所述U 形支架360度转动。
9.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述第一驱动件、所述第二驱动件、所述第三驱动件均为空心杯电机。
2
无人机主要部件
1、首先介绍的是无人机的大脑——飞控 无人机飞行控制系统是指能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行的控制系统,是无人机的大脑,也是区别于航模的最主要标志,简称飞控。飞控的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成)。如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢、升力变小,自然就不再向左倾斜。如果没有飞控系统,四轴飞行器就会因为安装、外界干扰、零件之间的不一致等原因形成飞行力量不平衡,后果就是左右、上下地胡乱翻滚,根本无法飞行。 工作过程大致如下:飞控系统实时采集各传感器测量的飞行状态数据、接收无线电测控终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理,输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行信道发送回地面测控站。飞控系统的硬件主要包括:主控制模块、信号调理及接口模块、数据采集模块以及舵机驱动模块等。 2、为传感器增稳的——云台 稳定平台,对于任务设备来说太重要了,是用来给相机增稳的部分,几千米的高度上误差个几分几秒就能差出去几十米。它主要通过传感器感知机身的动作,通过电机驱动让相机保持原来的位置,抵消机身晃动或者震动的影响。云台主要考察几个性能:增稳精度、兼容性(一款云台能适配几款相机和镜头)和转动范围(分为俯仰、横滚和旋转三个轴),如果遇到变焦相机,就更加考验云台的增稳精度了,因为经过长距离的变焦,一点点轻微的震动都会让画面抖动得很厉害。 现时的航拍云台主要由无刷电机驱动,在水平、横滚、俯仰三个轴向对相机进行增稳,可搭载的摄影器材从小摄像头到GoPro,再到微单/无反相机,甚至全画幅单反以及专业级电影机都可以。摄影器材越大,云台就越大,相应的机架也就越大。
飞越 TAROT Gopro两轴无刷云台用户手册
TAROT Gopro两轴无刷云台用户手册V1.0 一、简介 T-2D云台是TAROT公司专为 GoPro Hero3相机而研制,应用于影视摄影娱乐,广告航模摄影等多项领域。云台采用6061T6铝合金全CNC精密加工,无刷电机直接驱动,整体框架设计具有构思精巧、安装方便等特性。稳定的云台结构使飞行器处于高速飞行状态中,仍能够精准地控制挂载的GoPro Hero3相机保持稳定,使画面输出达到最佳的航拍效果。 二、特性 1、支持GOPRO Hero3视频辅助输出 2、支持供电电压反接保护及电压补偿 3、支持电机驱动端短路保护 4、支持初始俯仰角自定义 5、支持感度参数调节和软件三维姿态显示 6、支持摇杆速率模式和位置模式 7、支持接收机:常规接收机、S-BUS接收机,DSM2/DSMJ/DSMX接收机 8、支持遥控设备:PPM/PCM/2.4G 9、工作电压:DC 7.4V~14.8V (推荐12V,三节锂电) 10、工作电流:200mA-500mA(与供电电压及电机功率有关) 11、工作环境温度:-15℃~65℃ 12、处理器:双32位高速ARM核处理器 13、传感器:三轴MEMS陀螺仪和三轴MEMS加速度计 14、最大角速率:2000°/sec 15、最大加速度:16g 16、控制频率:2000Hz 17、电机驱动频率:20KHz(无噪声平滑驱动) 18、控制精度:0.1° 19、控制角度范围:-45°~45°(滚转),-135°~90°(俯仰) 20、姿态解算算法:专用于无刷电机驱动云台的解耦EKF算法 21、适用拍摄设备:GOPRO Hero3 三、功能和接口 接线说明:
大疆无人机价格参考3
无人机价格参考公司名称:大疆 网址:https://www.360docs.net/doc/a414505601.html,/cn/support 产品分类: 一、多轴四旋翼 Inspire 1 悟 单控的17999元
飞行器型号 T600 重量(含电池) 2935 克 最大起飞重量 3400 克 悬停精度(可安全飞行状态) 垂直:0.5 米 水平:2.5 米 最大旋转角速度 俯仰轴:300°/秒 航向轴:150°/秒 最大俯仰角度 35° 最大上升速度
5 米/秒 最大下降速度 4 米/秒 最大水平飞行速度 22 米/秒(A TTI 模式下,海平面附近无风环境) 最大飞行海拔高度 4500 米 最大可承受风速 10 米/秒 飞行时间 约18 分钟 动力电机型号 DJI 3510 螺旋桨型号 DJI 1345 室内定位悬停 标配 工作环境温度 -10°至40° C 轴距 559 至581 毫米 最大外形尺寸 438 x 451 x 301 毫米 功率谱密度 9.06mW/MHz
云台型号 ZENMUSE X3 功耗(含相机) 静态:9 W 动态:11 W 角度抖动量 ±0.03° 云台安装方式 可拆式 可控转动范围 俯仰:-90°至+30° 水平:±320° 结构设计范围 俯仰:-125°至+45° 水平:±330° 最大控制转速 俯仰:120°/秒 水平:180°/秒 相机名称 X3 型号 FC350 总像素 1276 万像素 有效像素
1240 万像素 照片最大分辨率 4000×3000 ISO 范围 100-3200 (视频) 100-1600 (照片) 电子快门速度 8 秒-1/8000 秒 录影FOV 94° 传感器 SONY EXMOR 1/2.3” 镜头 20mm (35mm 格式等效)f/2.8;对焦点无穷远9 组9 片(含2 片非球面透镜) 蓝玻璃滤光片 照片拍摄模式 单张拍摄 多张连拍(BURST:3/5/7 张、 自动包围曝光(AEB):3/5 张@0.7 EV 步长定时拍摄 录像分辨率 UHD:4096x2160p24/25、3840x2160p24/25/30 FHD:1920x1080p24/25/30/48/50/60 HD:1280x720p24/25/30/48/50/60 视频存储最大码流
二自由度简易云台增稳控制系统设计
二自由度简易云台增稳控制系统设计 项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。 项目方案: 本课题分以下步骤展开研究: 2014年4月~ 2014年10月 收集有单片机接口程序设计方面的资料,学习相关理论知识; 2014年11月~2014年12月 学习MWC飞行控制板的程序设计技术; 2015年1月~2015年4月 设计板载姿态传感器数据读取; 2015年5月~ 2015年8月 设计舵机控制程序和平台机械结构,测试平台增稳性能; 2015年9月~2015年10月 撰写研究报告、结题,项目鉴定。 本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制 预期成果: 本项目要求完成如下成果: 设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。完成研究报告一份。 二自由度云台概述: 云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。 根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。 增稳的意义: 比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
【CN209676340U】三轴云台摄像头结构【专利】
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920272992.1 (22)申请日 2019.03.04 (73)专利权人 李佳 地址 518000 广东省深圳市罗湖区凤凰路 181号凤凰印象花园24A (72)发明人 李佳 (74)专利代理机构 深圳中一联合知识产权代理 有限公司 44414 代理人 蔡鹏娟 (51)Int.Cl. H04N 5/225(2006.01) F16M 11/10(2006.01) F16M 11/08(2006.01) F16M 11/18(2006.01) (54)实用新型名称三轴云台摄像头结构(57)摘要本实用新型提供了一种三轴云台摄像头结构,包括基座、与基座转动连接的连接架、第一驱动件、与连接架转动连接的摄像头壳体、第二驱动件、设于摄像头壳体内的拍摄装置、以及第三驱动件,拍摄装置相对摄像头壳体转动的转动轴与拍摄装置的光轴平行或者重合;摄像头壳体呈封闭状且其内部具有用于容纳拍摄装置的容纳腔。本实用新型提供的三轴云台摄像头结构,基座至拍摄装置的连接方式为基座-Y -P -R -镜头,结构简单紧凑,摄像头壳体及三轴云台摄像头结构的整体性较强,该三轴云台摄像头结构不会出现凹陷形状,避免线缆卡在三轴云台摄像头结构 内。权利要求书1页 说明书5页 附图5页CN 209676340 U 2019.11.22 C N 209676340 U
权 利 要 求 书1/1页CN 209676340 U 1.三轴云台摄像头结构,其特征在于:包括基座、与所述基座转动连接的连接架、用于驱动所述连接架相对所述基座偏航旋转的第一驱动件、与所述连接架转动连接的摄像头壳体、用于驱动所述摄像头壳体相对所述连接架俯仰转动的第二驱动件、设于所述摄像头壳体内的拍摄装置、以及用于驱动所述拍摄装置相对所述摄像头壳体翻滚转动的第三驱动件,所述拍摄装置相对所述摄像头壳体转动的转动轴与所述拍摄装置的光轴平行或者重合,且所述摄像头壳体呈封闭状且其内部具有用于容纳所述拍摄装置的容纳腔。 2.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述连接架为U形支架,所述U形支架包括底部、以及分别连接于所述底部两侧的两个侧部,所述底部与所述第一驱动件连接,所述摄像头壳体夹设于两个所述侧部之间,且所述摄像头壳体的转动轴线穿过两个所述侧部设置。 3.如权利要求2所述的三轴云台摄像头结构,其特征在于:所述第一驱动件的输出轴与所述底部固定连接,且所述U形支架的转动轴穿过所述底部的中心及所述基座的中心设置。 4.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述拍摄装置与所述摄像头壳体可拆卸连接。 5.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述拍摄装置上设有姿态传感器。 6.如权利要求2所述的三轴云台摄像头结构,其特征在于:两个所述侧部上均开设有第一通孔,所述第二驱动件的输出轴穿过其中一个所述第一通孔且与所述摄像头壳体固定连接,另一个所述第一通孔中设有第一轴承,所述第一轴承与所述摄像头壳体固定连接。 7.如权利要求6所述的三轴云台摄像头结构,其特征在于:所述摄像头壳体包括第一平面、第二平面、以及连接所述第一平面和所述第二平面的弧面,所述第一平面和所述第二平面相互平行,所述第一平面和所述第二平面分别与两个所述侧部正对设置,所述第一平面与所述第二驱动件的输出轴固定连接,所述第二平面与所述第一轴承固定连接。 8.如权利要求2所述的三轴云台摄像头结构,其特征在于:所述摄像头壳体相对所述U 形支架360度转动。 9.如权利要求1所述的三轴云台摄像头结构,其特征在于:所述第一驱动件、所述第二驱动件、所述第三驱动件均为空心杯电机。 2
基于运动估计和视觉跟踪的云台自动锁定系统和方法与设计方案
本技术公开了一种基于运动估计和视觉跟踪的云台自动锁定系统和锁定方法,其中,锁定系统包括由数据链路实现通讯的天空端和地面端,其中天空端由变焦相机、三轴云台、云台电机、控制器及编码模块构成,地面端主要包括控制模块,方便操作人员在地面操纵云台相机实现目标跟踪和和精细调整;基于上述自动锁定系统的锁定方法,通过创新的跟踪算法可以自动补偿云台运动造成的目标位置变化,提高了目标位置估计的精度;同时,通过在跟踪算法中设置尺度池,可以自适应跟踪目标的距离变化,无论其在图像中的占比变大还是变小,都可以正确跟踪。另外,该锁定方法还可以根据目标在图像中的占比自动调节焦距,使其处于合适的大小。 权利要求书 1.基于运动估计和视觉跟踪的云台自动锁定系统,其特征在于,包括变焦相机、三轴云台、云台电机、控制器、数据链路、编码模块及控制模块,所述变焦相机、三轴云台、云台电机、控制器及编码模块构成天空端,所述控制模块构成地面端,所述天空端与地面端通过数据链路实现通讯;
所述变焦相机安装于三轴云台上,用于拍摄视频数据; 所述三轴云台由受控制器控制的云台电机驱动,实现在偏航、横滚、俯仰三个角度上按照控制指令运动; 所述编码模块将拍摄到的视频数据进行编码,经由数据链路传输至控制模块; 所述控制模块对接受到的视频数据进行解码、还原、运动估计和预处理,跟踪寻找用户框选目标并得出目标在图像中的中心坐标和大小,同时计算出云台电机偏移控制量和变焦控制量,分别传输至控制器和变焦相机。 2.根据权利要求1所述的基于运动估计和视觉跟踪的云台自动锁定系统,其特征在于,所述控制模块包括: 解码子模块:将天空端传输回的数据进行解码,还原为RGB格式的图像数据; 运动估计子模块:得到预期的目标位置差值; 图像数据预处理子模块:将原始图像变换至合适大小,并消除噪点平滑图像; 视觉跟踪算法子模块:在图像中获取到目标的位置和大小; 云台控制子模块:实现变焦控制,调整变焦镜头。 3.利用权利要求1所述的云台自动锁定系统实现云台自动锁定的方法,其特征在于,包括如下步骤: S1、变焦相机采集视频数据,编码模块对视频数据进行编码后由数据链路传输至地面 端的控制模块;
八旋翼无人机系统
八旋翼无人机系统 Document number【980KGB-6898YT-769T8CB-246UT-18GG08】
八旋翼无人机系统技术文件 一、产品名称:X-8八旋翼无人机系统 X-8是全新研制的八旋翼无人机系统,具有载重量大、续航时间长、体积小、重量轻、目标特性小,使用快捷、机动灵活、操作使用及维修简便等特点,自成体系独立执行电力巡检任务。 简介: X-8 八旋翼是专业无人机技术研发团队经过多年研究、测试,最新推出的一款全球同类产品载重量最大、可垂直起降、拥有多项专利的无人飞行系统。 1)X-8选用自主驾驶设备,大大提高飞控稳定性。 2)可携带多种任务载荷。 3)可用于执行资料收集、测量、检测、侦查等多种空中任务,在电力巡检领域能发挥其高效、隐蔽性强的特点,能对目标物进行远距离监视。 产品特点: (1)飞行器具有遥控、自主飞行能力,可以实时修改飞行航路和任务设置;(2)测控与信息传输设备具有遥控、实时信息传输的功能,具有多机、多站兼容工作及一定的抗截获、抗干扰能力; (3)侦察任务设备能昼夜实时获取目标图像信息,具有手动、自动控制工作模式,可迅速发现、捕获、识别、跟踪目标; (4)飞行控制与信息处理站具有对飞行器进行遥控飞行和对机载任务设备进行操控的功能,具有飞行参数/航迹显示、航路规划和实时修改飞行计划、重新设置任务样式的能力;具有通过视频实现第一视角控制飞行的能力;具有接收标准视频信号、实时处理/存储图像、数据叠加等能力,具有目标定位和引导打击的能力,且能与上级指挥机关、情报处理中心和指挥系统相通连; (5)地面保障设备具有简易检测、维修与训练的能力,具有快速更换易 损件、备用动力电池组和双模态充电的功能; (6)全系统外场展开迅速,具有车载大范围机动和携行能力。 机体结构技术参数:
自由度简易云台增稳控制系统设计
二自由度简易云台增稳控制系统设计 工程简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制. 工程方案: 本课题分以下步骤展开研究: 2014年4月~ 2014年10月 收集有单片机接口程序设计方面的资料,学习相关理论知识; 2014年11月~2014年12月 学习MWC飞行控制板的程序设计技术; 2015年1月~2015年4月 设计板载姿态传感器数据读取; 2015年5月~ 2015年8月 设计舵机控制程序和平台机械结构,测试平台增稳性能; 2015年9月~2015年10月 撰写研究报告、结题,工程鉴定. 本工程主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制 预期成果: 本工程要求完成如下成果: 设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试.完成研究报告一份. 二自由度云台概述: 云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结.其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置.主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展. 根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台. 增稳的意义: 比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定.如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的.将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的
分享无刷云台PID等参数说明以及调试教程
分享无刷云台PID等参数说明以及调试教程 参数说明: P,I,D - PID控制器设置,单独为每个轴 P - 定义对干扰的响应。越大,反应速度越快。也可以 解释为“增益”传感器信号之前,它会被传递给电机.. 如何调整:这个值从零慢慢增加,直至稳定的质量变得好。 太高的值可能导致系统自激(可见增加振荡)。 重要!如果从主框架的振动被传递到摄像机平台,它们可能导致 简单的自我激励和不平衡。 在低频振荡的情况下,它们可以抑制通过增加D参数。 D的增加1 ..2个单位,如果将停止振荡 -你可能会进一步增加P。 D - 定义抑制反应。它有助于防止低频振荡,但过高 值可能会引入系统中的高频率的噪音的情况下,可能会增加 振动。尽量保持它尽可能接近零。 I - 定义反应的速度控制命令从接收器。值给出非常低 缓慢和平稳的操作员控制的反应,但也很缓慢的运动适当的地平线 位置误差大的情况下。高值让迅速移动相机和迅速返回到地平线,如有倾斜。Power–定义对每个电机的输出功率。设置从0到255,其中255 - 是最大的可用功率。 如何设置这个参数: 过高的话会导致电机过热 过低的话扭矩不够 如果已经调过PID,还想再加power的话需要调小PID Invert–定义了电机的旋转方向。这是非常重要的,选择正确的设置。那里 自动检测。要启动检测,设置P,I,D=0,设置功率 上述建议(或一般值设置为100)。级相机板水平(可能是不 精确的,因为磁场矢量是随机的位置),然后按下自动按钮(位于 附近设置反转)。在校准过程中,相机将在小角度倾斜。 N.POLES -定义每个电机的极数(磁铁)。此值大致在自动检测 上面描述的校准程序。如果检测到错误,手动:数一数 磁铁电机(一般是14级) RC min.angleRC max.angle - 定义范围从最小的到最大角度的摄像头 倾斜,从接收机控制。逆控制,只需设置一个值大于第二个。为 例如,如果你想从地平线(0度)倾斜相机直降90度, min.angle=0,max.angle= 90(或90 ..逆为0)。 INC.MODE - 遥控器的控制模式开关 LPF/SPD - 在绝对模式的情况下,它适用于接收信号的低通滤波器。数字越大是平滑的控制(但更多的延迟反应)。在增量模式下,它设置了 摄像机的旋转角速度。数字越大,旋转越快。 EXTERNALFC GAIN–飞控增稳输出,如果你作出可选连接飞行 控制器。这种连接方式有助于提高稳定质量。许多飞行控制器具有输出 相机横滚和俯仰轴万向节舵机。您应配置此输出约+-30度范围。 步骤:控制器应调整并接通电源。相机的稳定工作。按AUTO 按钮,然后慢慢倾斜直升机帧由每个轴的前方或后方约20~30度。重复此
俄版SimpleBGC、Storm32开源三轴云台软硬件以及调参软件说明书-V1.02
开源俄版三轴云台软硬件、调参软件说明书 声明: 本方案采用开源方案,云台嵌入式软件采用simpleBGC开源代码,并参考了网上“SimpleBGC32- 开源三轴无刷云台算法完全解说”修改而成,程序在STorM32 BGC V1.31硬件开源板卡中调试成功并通过实测。调参软件采用storm32-bgc开源调参软件程序修改而成,继续秉承open原则,开发板硬件套件因为有成本,没办法free,但是软件一律源代码! 在此对以上作者表示无比敬仰!如有侵权,请及时提出,我们配合修改! 所有软件都是笔者在开源基础上针对硬件修改而成,付出辛勤和汗水编写调试了n多天才调试成功的,送源代码是让您学习用的,您可以借鉴开发您自己的产品,请您不能将该源代码直接用作商业用途,一经发现笔者保留追究的权利。 嵌入式硬件 采用STorM32 BGC V1.31硬件开源板卡为基础,可参考V130的原理图和PCB 原理图:" \三轴云台\硬件\storm32-bgc-v130-eagle-gerber-files-20140322\STorM32 BGC v130.sch" PCB:" \三轴云台\硬件\storm32-bgc-v130-eagle-gerber-files-20140322\STorM32 BGC v130.brd" 坑一:原理图PCB请用EAGLE打开查看,就不要用allegro pads等工具try 啊try的,再把电脑踹了。 坑二:网络的SimpleBGC程序不能直接跑在该板子上,笔直进行了移植调试,请不要直接将网上的源码烧录在该板子上噢,烧板子的笔者就不进行技术支持了。
环境搭建 明白人看了之后,就可以开始不论是买板子还是做板子,总之拿到一块板子以后,先安装了程序搭建起环境,调试调试吧 1.准备工具 a.JLINK仿真器一个 b.串口转接器一个: https://www.360docs.net/doc/a414505601.html,B转串口驱动程序:\三轴云台\硬件\Storm32驱动资料\ft232r usb uart 驱动\ (当 然有可能是其他串口驱动,看你手头上的转换器型号了) d.Mini USB线缆一条 https://www.360docs.net/doc/a414505601.html,b驱动程序:\三轴云台\硬件\Storm32驱动资料\USB驱动程序 \VCP_V1.3.1_Setup_x64.exe f.Keil 安装包我的事keil 5.21版本的,网上下载一个吧,好多文档介绍keil的 g.如果你想要修改调参软件,就要下载perl ,我用的是5.24,其他版本的没试过,不知 道兼容不兼容,大家可以给我反馈
自稳定云台
自动稳定云台 一般的云台是固定在一个平台上,尤其是使用能够观察几公里以外图像的设备,其重量会有几公斤直到几十公斤,为了保证监控设备的安全需要将设备牢牢的固定在云台上,因此摄像机会随着船的上下左右摇摆而摇摆,因为船的颠簸幅度很大,而依靠人工跟踪目标几乎是不可能的。所以摄像机所经常捕捉不到目标,因而达不到监控的效果。 根据这种情况,我公司的云台具有自动稳定功能,云台的底部固定在船的顶部,将监控设备固定在云台上,表面上看起来自稳定云台和普通的重载云台区别不是很大,但是在云台的内部安装的设备可以自动的调整监视设备的绝对水平姿态,在小于30度的摆幅下能实现图像高度稳定。使监视设备时时保持与目标物的相对稳定状态,从而保证了图像画面的稳定。 自动稳定云台是为移动,晃动环境条件下摄影、摄像提供的专用设备。主要作用是为摄像机提供一个高度稳定的摄像平台,使拍摄的画面尽可能的不晃动。 可广泛的搭载各种应用于摄像设备。除了可以作为摄影和摄像以外,自动稳定云台还可以用于: 1. 登陆作战,海上射击 2. 舰艇导弹发射 3. 高速运动中测量 4. 海上高精度测量 5. 航天工程应用 自稳云台的应用场合大多是极特殊的场合,所以分类比较细,如顶载型多用于潜艇,汽车和水面船舶。倒置型多用于飞机航拍,隧道探察、水下作业辅助等一些特殊用途。 除了种类,技术划分也分为:高频自稳云台和低频自稳云台。高频多应用于汽车,飞机,这些场合的震动频率高,幅度小,而低频自稳云台多用于船舶,其特点是位移大,但是频率较低。 自稳云台除了具备一般云台的方向控制功能之外,还可以拥有一些普通云台不具备的特点:如温度保持功能,气压保持功能,自洁净功能,目标锁定(自动跟踪)功能等等。 在一些特殊应用中,如飞行器在空中的横滚,海底拍摄,需要同时满足摄像机姿态稳定与目标图象稳定两种条件。所以,其制造精度,控制技术,软件编制方面都极其复杂。