回音抵消技术的探讨-厦门科技信息网-厦门科技信息网
回音抵消技术的探讨
陈立峰
回波的分类及产生原因
通信系统中回波包括电学回声和声学回声。
在PSTN中,为了降低电话中心局与电话用户之间电话线的价格,用户线间的连接采用两线制;而电话中心局之间连接采用四线制。在采用的混合电路中,由于阻抗的失配,会不可避免地产生电流泄漏。电流泄漏使得一部分信号的能量反射回信号源,这种反射和信道延迟结合在一起,使讲话者听到自己的声音或者回声,听话者也听到回声,即为电学回声。
声学回声是指扬声器播出的声音在被受话方听到的同时,也通过多种路径被麦克风拾取到。多路径反射的结果产生了不同延时的回声,包括直接回声和间接回声。直接回声是指由扬声器播出的声音未经任何反射直接进入麦克风。这种回声的延时最短,它同远端说话者的语音能量,扬声器与麦克风之间的距离、角度,扬声器的播放音量,麦克风的拾取灵敏度等因素直接相关;而间接回声是指由扬声器播出的声音经过不同的路径(如房屋或房屋内的任何物体)的一次或多次反射后进入麦克风所产生的回声的集合。房屋内的任何物体的任何变动都会改变回声的通道。因此,这种回声的特点是多路径的、时变的。
回音控制技术发展历史
为控制回音的影响,人们最早提出的是“通过网络衰减”的方法。该方法在发送和接收方向上分别插入一个衰减器,所以,回音的衰减比话音的衰减大2倍。然而,当通信距离很长时,由于话路会经过许多衰减器,因此话音衰减随着传输距离的增加而增加,最后可能导致话音电平降到无法听清楚的地步。这一缺点,使得“通过网络衰减”的方法的实用性受到很大限制。
20世纪50年代,人们在“通过网络衰减”技术的基础上提出了回音抑制器技术。回音抑制器通过开启发送路径或在发送路径上插入较大的衰减来达到控制回音的目的。理想情况下,回音抑制器应在远端用户说话时开启发送路径而在远端用户接收时关闭发送路径。然而,这很难做到,即使是最好的回音抑制器也经常同时将远端用户的回音和一部分远端用户正在接收的话音同时去除,因此回音抑制器要求通话的双方都很礼貌。当远端用户打断近端用户的话时,回音抑制器往往会开启发送路径,从而使近端用户的话音受到抑制。
以上两种方法都存在较大缺陷和局限性。
鉴于“通过网络衰减”及回音抑制器方法存在的上述缺陷,人们迫切希望能发明一种新技术以便有效地控制回音的影响。20世纪60年代,朗讯科技贝尔实验室首先提出回音抵消器技术,由于回音抵消器技术的自适应滤波方法有望克服以往方法存在的缺陷,该技术提出后,得到广大专家与厂家的推广与重视。60年代后期,美国通信卫星公司首先推出第一批模拟回音抵消系统,但该系统由于体积及制造成本等原因,没有得到商业推广。1979年,贝尔实验室研制成功第一批数字回音抵消器产品。数字回音抵消器产品的诞生,标志着回音控制技术进入了一个新纪元。
自适应回音抵消理论
自适应回音抵消的基本思想是估计回音路径的特征参数, 产生一个模拟的回音路径, 得出模拟回音信号, 从接收信号中减去该信号,实现回音抵消。其关键就是得到回声路径的冲击响应 ^
()h n ,由于回音路径通常是未知的和时变的,所以一般采用自适应滤波器来模拟回音路径。自适应回音消除的显著特点是实时跟踪,实时性强。 1、自适应滤波器的结构
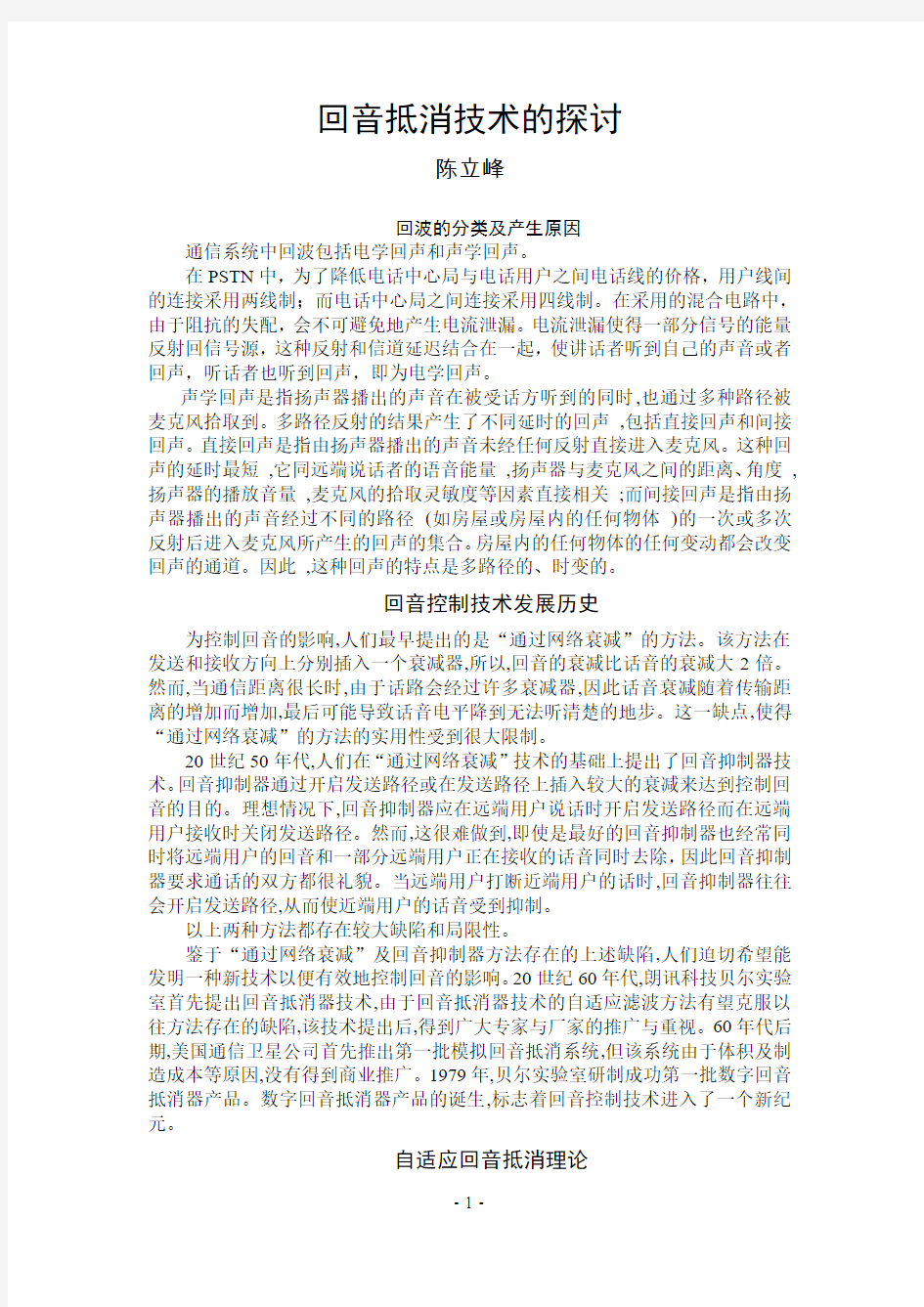
图 1自适应滤波器的结构
图1中所示的滤波器的输入是(){(),(1),...(1)}T n x n x n x n N =--+X ,滤波器的权系数是12(n)={(),(),...()}T N h n h n h n h ,()d n 为期望输出信号,^()d n 为滤波器的实际输出,也称估计值,^1()(1)()N i i d n x n i h n ==-+∑。()e n 是误差,^
()()()e n d n d n =-。
由误差经过一定的自适应滤波算法来调整滤波系数,使得滤波器的实际输出接近期望输出信号。
2、自适应回音消除的实现原理
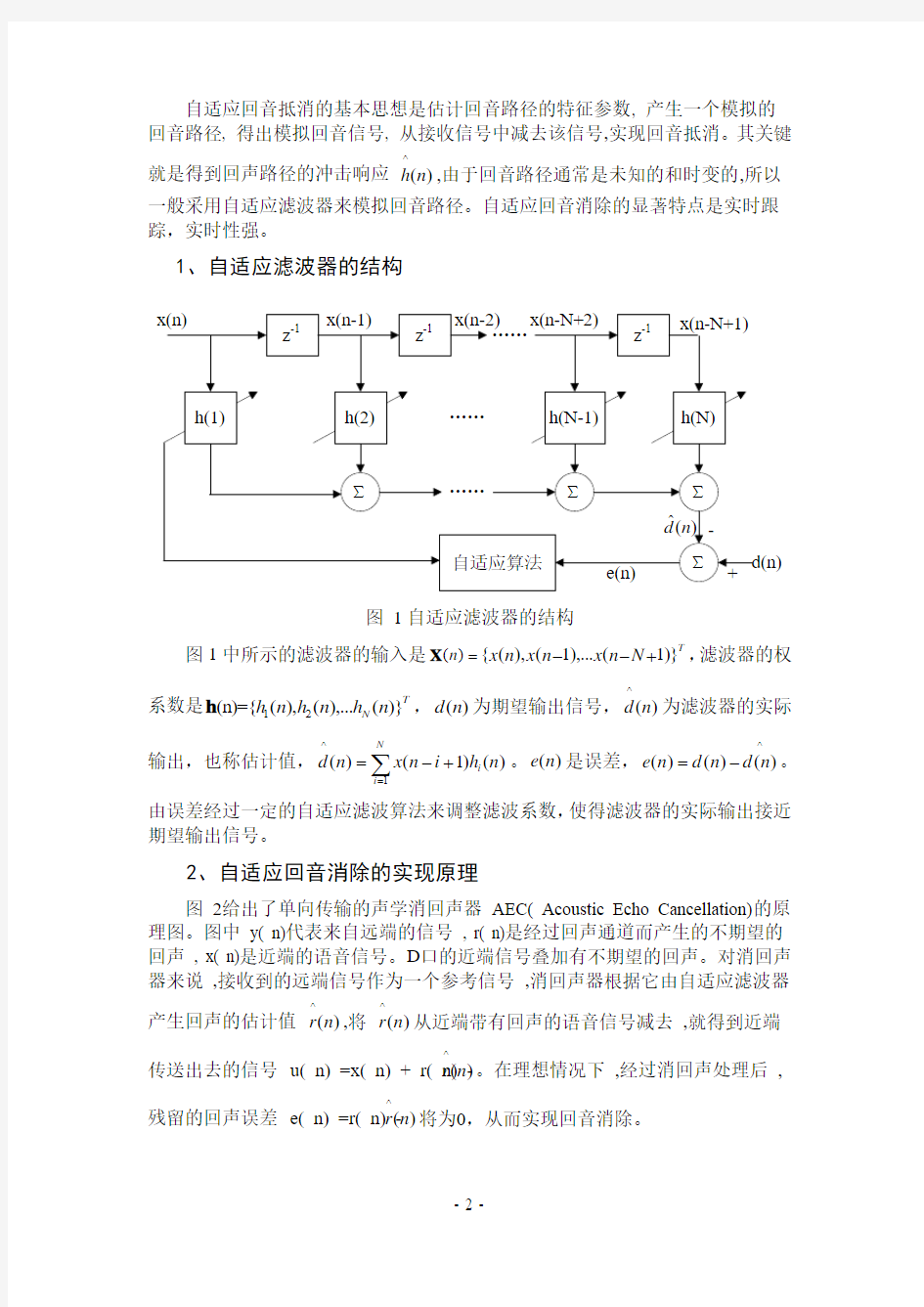
图 2给出了单向传输的声学消回声器 AEC( Acoustic Echo Cancellation)的原理图。图中 y( n)代表来自远端的信号 , r( n)是经过回声通道而产生的不期望的回声 , x( n)是近端的语音信号。D 口的近端信号叠加有不期望的回声。对消回声器来说 ,接收到的远端信号作为一个参考信号 ,消回声器根据它由自适应滤波器产生回声的估计值 ^()r n ,将 ^
()r n 从近端带有回声的语音信号减去 ,就得到近端传送出去的信号 ^u( n) =x( n) + r( n) -()r n 。在理想情况下 ,经过消回声处理后 ,残留的回声误差 ^e( n) =r( n) -()r n 将为0,从而实现回音消除。
r(n)房间
图2 AEC 原理图
回音抵消的主要性能指标 收敛速度:滤波器的收敛速度越快越好,使正常通话开始后,通话者很快就感觉不到明显的回波存在。
稳态残留回波:即当滤波器收敛达到稳态后的回波输出量,实际中总是希望该参数越小越好。
ITU-T G .168对各种回音抵消器产品在包括以上两个主要指标在内的各种指标规定了必须达到的标准。
目前常见的自适应算法研究与比较
常见自适应滤波算法有:递推最小二乘算法,最小均方误差算法,归一化均方误差算法,快速精确最小均方误差算法,子带滤波,频域的自适应滤波等等。
其中最典型最有代表性的两类自适应算法就是递推最小二乘算法和最小均方误差算法,以下对几种较常用的算法进行介绍:
1、递归最小二乘法(RLS)
RLS 算法的基本方法为:
^
^33()()(1)
()()()
(1)()()()(1)()
1()[(1)()()(1)]
()(1)()()
T T T d n X n H n e n d n d n P n X n k n X n P n X n P n P n K n X n P n H n H n K n e n λλ=-=--=+-=---=-+ K(n) 称为Kalman 增益向量,λ是一个加权因子,其取值范围0 <λ< 1 ,该算法的初始化一般令H( - 1) = 0及P( - 1) = 1/δI,其中δ是小的正数。
2、最小均方误差算法(LMS )
最小均方误差算法(LMS )是一种用瞬时值估计梯度矢量的方法,即
2[()]()2()()()n e n e n n n ??==-?X h (1)
按照自适应滤波器滤波系数矢量的变化与梯度矢量估计的方向之间的关系,可以写出LMS 算法调整滤波器系数的公式如下所示:
1(1)()[()]2n n n μ+=+-?h h
()()()n e n n μ=+h X
(2) 上式中的μ为步长因子。μ值越大,算法收敛越快,但稳态误差也越大;μ值越小,算法收敛越慢,但稳态误差也越小。为保证算法稳态收敛,应使μ在以下范围取值:
212
0()
N i x i μ=<<∑
从收敛速度来看,RLS 算法明显优于LMS 算法,但RLS 算法在运算上却比LMS 算法复杂得多,为了减小计算复杂度,并保留RLS 的收敛性能,人们提出了一些改进的RLS 算法。如RLS 格型算法,快速RLS 算法,梯度格型算法,快速横向滤波器算法等。总的来看,这些以收敛法都是以运算速度换取运算复杂性。
于是人们研究介于两者之间的一种算法, 如共轭梯度法、自仿射投影算法 等。共轭梯度法不需要RLS 中的矩阵运算,也没有某些快速RLS 算法存在的不稳定问题,但它的缺点是稳态误差比较大。
而LMS 算法的优点是运算简便,但它只有一个可调整参数,即步长因子μ ,可以用来控制收敛速率, 由于μ 的选择受系统稳定性的限制, 因此, 算法的收敛速度受到很大限制。为了加快收敛速度人们提出许多改进的LMS 算法。
(1)块处理LMS 算法(BLMS )
为了对付LMS 运算量大的问题,在LMS 基础上提出了块处理LMS (BLMS )。它与LMS 算法不同的是:LMS 算法是每来一个采样点就调整一次滤波器权值;而BLMS 算法是每K 采样点才对滤波器的权值更新一次。这样BLMS 算法的运算量就比LMS 的运算量要小的多,但它的收敛速度却与LMS 算法相同,具体算法如下:
由(2)式可知,那么可以推出
()(
1)(1)(n n e n n μ=-+--h h X (3) 将(3)式带入(2)式得:
(1)(1)()()(1)(n n e n n e n n μμ+=-++--h h X X
依次类推可得:
(1)()()()()n K n e n K n K e n n
μμ++=++++???+h h X X (2)能量归一化LMS 算法(NLMS )
针对算法收敛时间依赖输入信号功率的问题,将自适应滤波器系数的调整量用输入信号的功率进行归一化,称为归一化的最小均方算法(NLMS ),具体算法如下:
1
01
2
_()()
(1)()()()
()()((()))N k k k k y y estimated echo i a y i k a i a i e i y i k P i P i average y i β-==-+=+-=∑ 其中a(k)为滤波器的系数,e(n)为误差信号,1β为固定环路增益,N 为滤波器系数,()y P i 为参考信号的能量估计。
(3)归一化块处理LMS 算法(BNLMS )
结合以上NLMS 和BLMS 两者的特点则有归一化块处理LMS (BNLMS )。
(4)变步长LMS 算法
而针对μ 值, 人们研究了许多变步长LMS 算法,一般是在滤波器工作的开始阶段采用较大的μ值,以加快收敛速度,而在后阶段采用较小的μ值,可以减小稳态误差。这类算法的关键是确定在整个过程中μ值如何变化或μ值在何种条件满足下才改变。
综合以上,自适应算法中最简单、运算量最小的是以LMS 为代表的一类算法,如NLMS 、BLMS 算法等,但同时他们也存在着收敛慢的缺点;与之相反的是另一个极端,是以RLS 等为代表的各种算法,他们虽收敛速度很快,但运算量很大;近些年兴起的AP (仿射投影),CG (共轭梯度),FN(快速牛顿)等算法,则是在运算量和收敛速度之间作适当折衷,从而获得了广泛的应用。
回顾与展望
综上所述,回音抵消的核心就是一个采用自适应算法的滤波器,虽然以前自适应信号理论发展迅速,但由于受到硬件的限制而难以实现,一直到上世纪70年代末80年代初,随着世界上第一片单片可编程DSP 芯片的诞生,才将理论广泛地应用到低成本的实际系统中,从而推动了新理论和应用领域的发展。
DSP 芯片是以数字信号处理为基础的,具有数字信号处理全部优点:改进的哈佛结构,具有深达6级流水线的结构,专用的硬件乘法器,速度快,精度高,稳定性好,接口方便简单,集成度高,可重复性好,保密性好,最重要的是具有一些特殊的指令结构,如MAX ,MIN ,FIRS ,LMS 等指令。其中指令LMS 为自适应滤波器的实现自适应算法提供了最大的方便。所以用DSP 芯片实现回音抵消具有很大优势。
随着通信的发展,通话距离也越来越长,使得信号延迟大大增加,回音现象也就更加严重。对回音抵消的需求同时也大大促进了回音抵消技术理论的发展。
总之,在回音抵消各种自适应滤波算法中,根据实际应用,还有很多地方需改善,比如各种参数的选择,而且要更好地解决收敛速度和稳态残留误差之间的
矛盾,实现较理想稳定的回音抵消效果还存在很多难点,期望学者们能提出更好的改进算法。
另外,除了居于核心地位的自适应滤波技术外,实际回音抵消技术应用系统中还包括远端信号检测、近端信号检测、舒适噪声产生、残留回波的非线性处理技术等,这些技术也有待改进。这样整个回音抵消器才能实现一个较好的回音抵消效果。
(作者单位:厦门大学通信工程系)