拉格朗日方程对平衡问题的应用
目录
摘要 (1)
关键字 (1)
Abstract (1)
Key Words (1)
1引言 (1)
2拉格朗日方程的推导 (1)
3在物体平衡上的应用 (3)
2.1平衡体系中拉格朗日的特殊形式 (3)
2.2实例 (4)
4结论 (5)
参考文献 (5)
拉格朗日方程对平衡问题的运用
摘 要:本文通过对拉格朗日方程得推导和对其可以在平衡系统中运用的原因的阐述,来说明了拉格朗日方程在平衡系统中运用的可行性和方便性,并通过举例说明了一类较典型的问题和解决该问题的方法。
关键字:拉格朗日;平衡;约束力;广义坐标
The Use Of The Lagrange Equation T o Balance
Abstract: By Lagrange's equations pushed to this article, and can cause the ap -plication of the balanced system set out to illustrate the Lagrangian of the feasibility and ease of application of the balanced system, and illustrates a more typical issues and ways to solve the problem.
Key Words : Lagrange; balance; binding; generalized coordinates
1引言
牛顿运动力学]1[作为描述物体运动的重要方程大家都有了解,但本文介绍的拉格朗日方程,在力学体系特别是动力学体系有着举足轻重的地位,同时在平衡问题上也发挥了一定的作用,本文将带领大家了解并熟悉这一方程,和它在平衡问题上的运用。
2拉格朗日方程的推导
拉格朗日方程的判定是由其坐标的性质决定的。直接有广义坐标所表示的方程就是拉格朗日方程[2]。我们常以q 来表示广义坐标,而一个系统所拥有的广义坐标个数是由系统的自由度和约束条件所确定,一般满足s=3n-k (其中那位所含物体的个数,k 是系统的约束条件个数,s 是广义坐标个数)。
当确定了广义坐标后,该系统的i r 物体位置即可表示为:
12(,,,)i i s r r q q q t =
(1)
利用上式将达朗贝尔方程[3]中的i r δ和i r 用广义坐标表示出来就可得到拉格朗日方程,推导如下: 由(1)式得
∑
=??=
?s
i i q q r r 1
ααα
δ (2)
将(2)式代入达朗贝尔方程得:
1
1
()0n
s
i i i i r F m r q q ααα
δ==?-?=?∑
∑
(3)
化简(3)式得:
1
1
[()]0s
n
i i i i r F m r q q ααα
δ==?-?=?∑∑
(4)
要使(4)式成立则αδq 系数为0即:
1
()0n
i i i i r F m r q α
=?-?
=?∑
(s 1=α) (5)
或写为
1
1
n
n
i i i i i r r m r F Q q q αα
α
==???
=
?
=??∑
∑
(6)
其中我们把αQ 称作广义力,即由广义坐标所表示的系统所受合力的量,为方便计算,我们降介(6)式如下:
1
1
1
()n
n
n
i i i i i i i i i i r r r d m r
m r m r q dt
q q α
α
α
===???=
?
-?
???∑
∑
∑ (7)
又有(1)式中知道
121
(,,)s
i
i i i s r r d r r q q q t q
dt
q
t
ααα
=??==
+??∑
(8)
于是可以用广义坐标表示出系统的动能T
2
12121(,;,;)2
i s s T m r
T q q q q q q t =
= (9)
由(8)和(9)式得出T 对.
αq 和αq 的导数
11n
n
i i i i i i r r T T m r
q r q q ααα==????=
?
=
?????∑
∑
(10)
1
1
n
n
i i i i i i r r T T m r
q
r
q
q
ααα==????=
?=
?????∑
∑
(11)
再将(10)和(11)式代入到(7)式即可得到
d T T Q d t q q
αα
α??-=??
(12)
其中我们就把(12)式称作理想完整体系的普遍拉格朗日方程,也就是一般方程,就是我们所求的最终方程,但由于在理论基础上我么通常所求的系统一般都是保守力,所以一般方程就可以进行一定的变换。即我们可以把保守力用V ?-来表示,那么广义力αQ 可表示如下:
1
n
i V r V Q r
q q αα
α
=???=-?
=-
???∑
(13)
将其代入(12)式可得
-V d T T Q dt q
q ααα
??-
=?? ()
(14)
我们令V T L -=有V 为保守力能量即势能,则只与αq 和t 有关则(14)式可改写为
0d L L dt q
q αα
??-=??
(15)
则(15)式就是理想完整条件下所受力是保守力[4]的拉格朗日方程,也就是我们在研究基础理论常要用到的方程。
当然为方便期间,当系统即有保守力又有非保守力时我们可以把非保守力用αQ 表示出来则又有拉格朗日方程为:
d L L Q dt q
q ααα
??-=??
(16)
有以上推导过程可知道拉格朗日方程是描述物体运动的动力学方程[5],即是另一种标量形式的动力学方程,就这一方面而言,他比牛顿的矢量描述在计算上要简单的多。
3在物体平衡上的应用
3.1平衡体系中拉格朗日的特殊形式
作为动力学的拉格朗日方程[6]为何可以在平衡问题上加以运用,很明显,平衡也是一种运动的状态,所以可以运用拉格朗日方程,有V T L -=这个式子我们知道,当物体处于平衡状态时,他的速度唯一恒定值,也就是说是T 个常数则在这种情况下,拉格朗日方程可以变形为下式:
1
0n
i i
i r Q F
q αα
=?=
?
=?∑ (s 1=α) (17)
或
0=??α
q V
(18)
也就是说只需要知道系统所受的保守力的势能广义坐标表达式),(21s q q q V ,然后代入(18)式解微分方程就可以求出系统的位移表达关系式。同时根据
i i
F mr = (19) 可得出系统所受约束力的大小和方向。 3.2实例
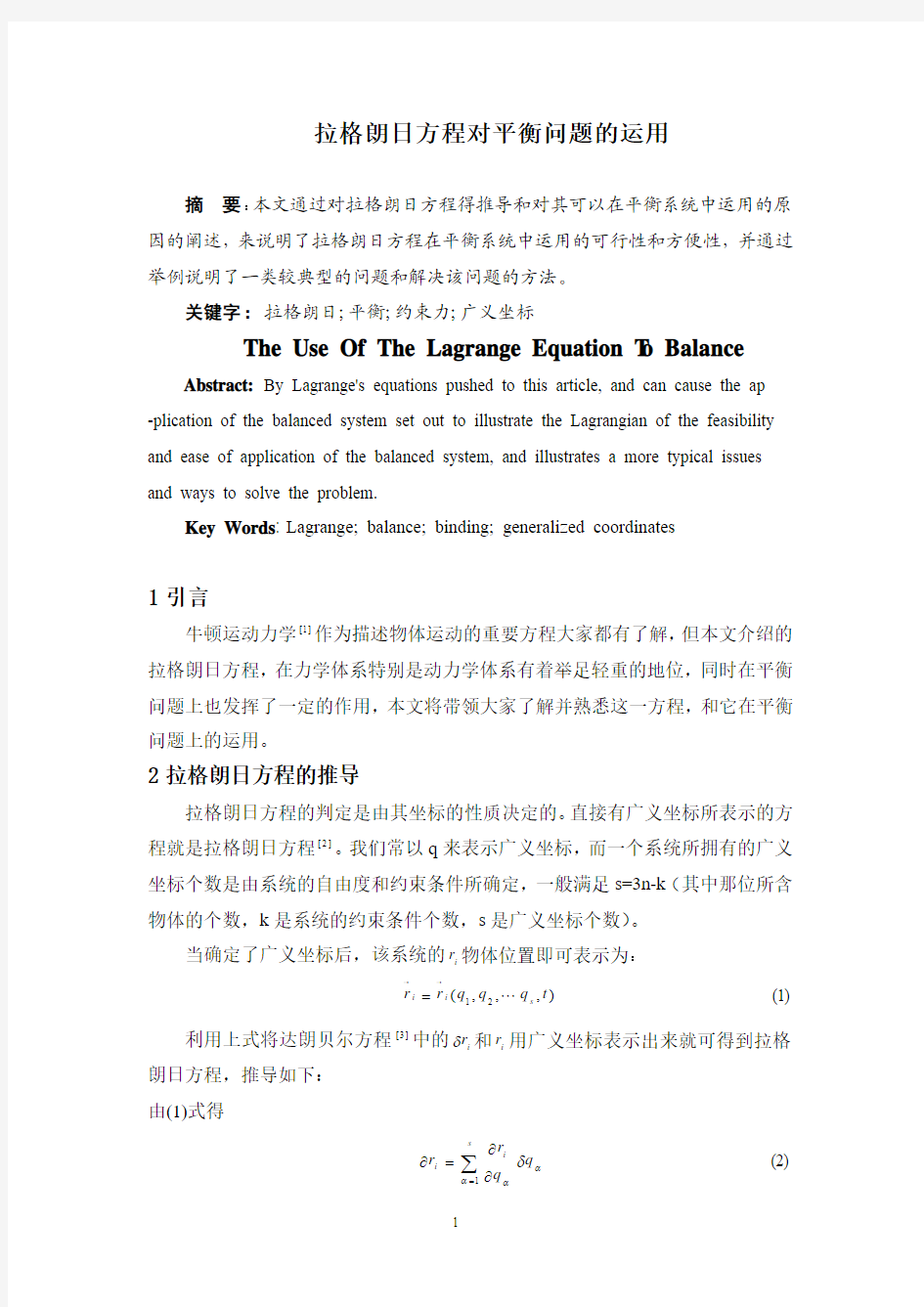
下面举一个实际的例子来说明拉格朗日方程在平衡问题[7]的运用。 如图1长度都为l 的的轻棒四根,光滑的连成一个菱形ABCD.AB 、CD 两边支于同一水平线上相距为2d 的两个钉子M 和N 上.BD 间用一根绳联接,C 点系一重量P ,设A 点的顶角为2α,求绳中的张力T F 。
图1 轻棒连成菱形图 图2 轻棒形成菱形受力分析图
解:本题所求的式体系平衡时的约束力[8]。拉格朗日方程不能求约束力。但我们把欲求的约束力看成主动力,而把相应的约束力解除,增加一个自由度,则仍可以用拉格朗日方程来求体系平衡时的约束力。本题中将BD 间的绳去掉,同时加上一对主动力T F 来表示,如图2,此图中的自由度为1,则取顶角为广义坐标,则有
θs i n l r B -= (20)
θsin l r D = (21)
A B C
D
N
M
P
A
B
C
D
N
M
P
T
F
θc o s 2l r P = (22)
将数值代入(17)式得
0s i n 2c o s 2-=+θθl P l F T (23)
最后可求的T F 的值
α
αc o s s i n P F T =
(24)
就得出了应求的值。
4结论
就以上所介绍的过程我们发现,拉格朗日方程是求受变化的力即主动力的作用下的体系的运动方程[9],似乎不适合对于平衡力的运用,但我们又同样知道力的平衡其实相当于两个或多个主动力之间的一种特殊关系,而运动方程则是描述物体在某一时刻的运动状态,当然也包括了主动力的平衡这一特殊情况。根据这一思路,我们可以把平衡时所受的约束力解放成主动力,列出拉格朗日方程,求得运动方程,然后再加上约束条件求解。这种等效转换[10]的思想是我想要强调的,也是要在本文所体现的一种思想。
当然对于平衡条件下的情况有好多种,一些其他的论文有所阐述,这里不再赘述。
参考文献
[1] 金尚年,马永利,等.《理论力学》第二版[M].北京:高等教育出版社,2001:46~48. [2] 赵晓婷.拉格朗日方程在力学中的应用[J ].江西电力职工大学学报,2001,1(14) . [3] 张玲.拉格朗日方程与牛顿方程之比较[J].高师学报,2003,5(8).
[4] 娄智美.质心系中的基本形式的拉格朗日方程及其应用[J ].大学物理学报,2006,1(25). [5] 王养丽,王璋奇,马岗.拉格朗日方程在点的运动分析中的应用[J].华北电力大学学
报,2000,1(27).
[6] Torby ,Bruce .Advanced Dynamics for Engineers ,HRW Series in Mechanical
Engineering[M].United States of America :CBS College Publishing ,1984:269
[7] 徐扬.不倒翁的力学问题的简单分析[M].西安:西安交通大学出版社,1999:21~23. [8] 漆安慎,杜婵英.《力学》第二版[M].北京:高等教育出版社,2005:73~74. [9] John Cox .Mechanics.Cambridge :University Press ,1904.140
[10] Deaver B S,Fairbank W M.Physlett,1961:43~46
拉格朗日方程的应用及举例08讲
拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:(1)拉格朗日方程适用于完整系统,可以获得数目最少的运动微分方程,即可以建立与自由度数目相同的n个方程,是一个包含n个二阶常微分方程组,方程组的阶数为2n。求解这个方程组可得到以广义坐标描述的系统运动方程。(2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取而变化。特别是解题时有径直的程序可循,应用方便。(3)所有的理想约束的约束反力均不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。(4)拉格朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用的广义力,避开了力、速度、加速度等矢量的复杂运算。(5)拉格朗日方程不但可以建立相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时,应首先建立以广义坐标q和广义速度q 表示的动能函数和广义力Q。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉格朗日方程的应用。 一、动能的计算 对于系统的动能,可以写出关于广义速度q 的齐次函数的表达式。在实际计算中,应用理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m,半径为r的均质圆盘D, 沿OAB直角曲杆的AB段只滚不滑。圆盘的盘面和曲 杆均放置在水平面上。已知曲杆以匀角速度ω1绕通过 O点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x和?,x为圆盘与曲杆接触点到 曲杆A点的距离,?为曲杆OAB的转角,? = ω1t。 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心C的速度和相对于质心平动坐标- - 优质资料
第二章 用拉格朗日方程建立系统数学模型
第二章 用拉格朗日方程建立系统的数学模型 §2.1概述 拉格朗日方程——属于能量法,推导中使用标量,直接对整个系统建模 特点:列式简洁、考虑全面、建模容易、过程规范 适合于线性系统也适合于非线性系统,适合于保守系统,也适合于非保守系统。 §2.2拉格朗日方程 1. 哈密尔顿原理 系统总动能 ),,,,,,,(321321N n q q q q q q q q T T = (2-1) 系统总势能 ),,,,(321t q q q q U U N = (2-2) 非保守力的虚功 N N nc q Q q Q q Q W δδδδ ++=2211 (2-3) 哈密尔顿原理的数学描述: 0)(2 1 21 =+-??t t nc t t dt W dt U T δδ (2-4) 2. 拉格朗日方程: 拉格朗日方程的表达式: ),3,2,1()(N i Q q U q T q T dt d i i i i ==??+??-?? (2-5) (推导:) 将系统总动能、总势能和非保守力的虚功的表达式代入哈密尔顿原理式中(变分驻值原理),有 0)( 22112211221122112 1 =+++??-??-??-??++??+??+??+??+??? dt q Q q Q q Q q q T q q U q q U q q T q q T q q T q q T q q T q q T N N N N N N N N t t δδδδδδδδδδδδ (2-6) 利用分步积分
dt q q T dt d q q T dt q q T i t t i t t i i i t t i δδδ?? ??-??=??21212 1 )(][ (2-7) 并注意到端点不变分(端点变分为零) 0)()(21==t q t q i i δδ (2-8) 故 dt q q T dt d dt q q T i i t t i t t i δδ)(212 1 ??-=???? (2-9) 从而有 0)])([2 1 1 =+??-??+??- ?∑=dt q Q q U q T q T dt d i i i t t i i N i δ ( (2-10) 由变分学原理的基本引理: (设 n 维向量函数M(t),在区间],[0f t t 内处处连续,在],[0f t t 内具有二阶连续导 数,在f t t ,0处为零,并对任意选取的n 维向量函数)(t η,有 ? =f t t T dt t M t 0 0)()(η 则在整个区间],[0f t t 内,有 0)(≡t M ) 我们可以得到: 0)(=+??-??+??- i i i i Q q U q T q T dt d (2-11) 即 i i i i Q q U q T q T dt d =??+??-??)( (2-12) 对非保守系统,阻尼力是一种典型的非保守力,如果采用线性粘性阻尼模型, 则阻尼力与广义速度}{q 成正比,在这种情况下,可引入瑞利耗散(耗能)函数D , }]{[}{2 1 q C q D T ≡ (2-13) 阻尼力产生的广义非保守力为:
拉格朗日方程的应用及举例08讲
1 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心 C 的速度和相对于质心平动坐标 拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:( 1)拉格朗日方程适用于完整系统,可以获得数目最 少的运动微分方程,即可以建立与自由度数目相同的 n 个方程,是一个包含 n 个二阶常微 分方程组,方程组的阶数为 2n 。求解这个方程组可得到以广义坐标描述的系统运动方程。 (2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取 而变化。特别是解题时有径直的程序可循,应用方便。( 3 )所有的理想约束的约束反力均 不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。( 4)拉格 朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用 的广义力,避开了力、速度、加速度等矢量的复杂运算。( 5)拉格朗日方程不但可以建立 相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对 运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐 标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描 述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论 上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和 规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们 将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过 于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时, 应首先建立以广义坐标 q 和广义速度q 表示的动 能函数和广义力 Q 。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉 格朗日方程的应用。 、动能的计算 对于系统的动能,可以写出关于广义速度 q 的齐次函数的表达式。在实际计算中,应用 理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m ,半径为r 的均质圆盘D , 沿OAB 直角曲杆的 AB 段只滚不滑。圆盘的盘面和曲 杆均放置在水平面上。已知曲杆以匀角速度-'1绕通过 O 点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x 和;:,x 为圆盘与曲杆接触点到 曲杆A 点的距离,:为曲杆OAB 的转角,:=rt 。 B
(完整word版)拉格朗日方程的应用及举例08讲
1 拉格朗日方程的应用及举例 拉格朗日方程有以下几个特点:(1)拉格朗日方程适用于完整系统,可以获得数目最少的运动微分方程,即可以建立与自由度数目相同的n 个方程,是一个包含n 个二阶常微分方程组,方程组的阶数为2n 。求解这个方程组可得到以广义坐标描述的系统运动方程。(2)拉格朗日方程的形式具有不变性。对于任意坐标具有统一的形式,即不随坐标的选取而变化。特别是解题时有径直的程序可循,应用方便。(3)所有的理想约束的约束反力均不出现在运动微分方程中。系统的约束条件愈多,这个特点带来的便利越突出。(4)拉格朗日方程是以能量的观点建立起来的方程,只含有表征系统运动的动能和表征主动力作用的广义力,避开了力、速度、加速度等矢量的复杂运算。(5)拉格朗日方程不但可以建立相对惯性系的运动,还可以直接建立相对非惯性系的动力学方程,只要写出的动能是绝对运动的动能即可,至于方程所描述的运动是对什么参考系的运动,则取决于所选的广义坐标。 纵观拉格朗日方程,看出分析力学在牛顿力学的基础上,提出严密的分析方法,从描述系统的位形到建立微分方程都带有新的飞跃。我们还应看到,虽然拉格朗日方法在理论上和应用上都有重要的价值,但是,牛顿力学的价值并未降低,特别是它的几何直观性和规格化的方法使人乐于应用,由于计算机的广泛使用,牛顿一欧拉方法又有所发展。我们将会看到,用拉格朗日方程求解,在获得数量最少的运动微分方程时,其求导过程有时过于繁琐,并有较多的耦合项。 应用拉格朗日方程建立动力学方程时,应首先建立以广义坐标q 和广义速度q 表示的动能函数和广义力Q 。为此,首先讨论动能的计算和广义力的计算,在此基础上,再讨论拉格朗日方程的应用。 一、动能的计算 对于系统的动能,可以写出关于广义速度q 的齐次函数的表达式。在实际计算中,应用理论力学的有关知识就可以建立以广义坐标和广义速度所表达的动能函数。 例1-1 已知质量为m ,半径为r 的均质圆盘D ,沿OAB 直角曲杆的AB 段只滚不滑。圆盘的盘面和曲杆均放置在水平面上。已知曲杆以匀角速度ω1绕通过O 点的铅直轴转动,试求圆盘的动能。 解:取广义坐标x 和?,x 为圆盘与曲杆接触点到曲杆A 点的距离,?为曲杆OAB 的转角,? = ω1t 。 应用柯尼希定理求圆盘的动能。为此,先求圆盘质心C 的速度和相对于质心平动坐标
流体的平衡微分方程及其积分
流体的平衡微分方程及其积分 一、流体平衡微分方程——欧拉平衡方程 如图所示,在平衡流体中取一微元六面体,边长分别为d x ,d y ,d z ,设中心点的压强为p (x,y,z )=p ,对其进行受力分析: 根据平衡条件,在x 方向有0F x =∑,即: 0zX y z y x p 21z y )21=+)+-((d dxd d d dx p d d dx x p p ρ????- 01X =-x p ??ρ 式中:X ——单位质量力在x 轴的投影 流体平衡微分方程(即欧拉平衡微分方程): ?????????=??-=??-=??- 010101z p Z y p Y x p X ρρρ 物理意义:处于平衡状态的流体,单位质量流体所受的表面力分量与质量力分量彼此相等。 压强沿轴向的变化率(z p y p x p ??????,,)等于轴向单位体积上的质量力的分量(ρX ,ρY ,
ρZ )。 二、平衡微分方程的积分 将欧拉平衡微分方程中各式,分别乘以dx 、dy 、dz ,整理: Zdz)Ydy (Xdx dz z p dy y p x ++=??+??+??ρdx p 因为p = p (x,y,z ) ∴ Zdz)Ydy (Xdx dp ++=ρ ρ为常量; Xdx +Ydy +Zdz 应为某函数W =F (x ,y ,z )的全微分: dz z W dy y W dx x W dz dy dx d ??+??+??=++=)Z Y (X W dW dp =ρ 平衡流体中压强p 的全微分方程 积分得:p=ρW +c 假定平衡液体自由面上某点(x 0,y 0,z 0)处的压强p 0及W 0为已知,则: c =p 0-ρW 0 ∴ p=p 0+ρ(W-W 0) 欧拉平衡微分方程的积分 三、帕斯卡定律 处于平衡状态下的不可压缩流体中,任意点M 处的压强变化值△p 0,将等值地传递到此平衡流体的其它各点上去。 说明:只适用于不可压缩的平衡流体; 盛装液体的容器是密封的、开口的均可。 四、等压面 平衡流体中压强相等的各点所组成的面。 等压面:dp =ρ(Xdx +Ydy +Zdz )=0 ρ为常量,则:Xdx +Ydy +Zdz =0 即:质量力在等压面内移动微元长度所作的功为零。 等压面的特征:平衡流体的等压面垂直于质量力的方向 只有重力作用下的等压面应满足的条件: 1.静止; 2.连通; 3.连通的介质为同一均质流体;
数学建模之微分方程建模与平衡点理论
微分方程 列微分方程常用的方法: (1)根据规律列方程 利用数学、力学、物理、化学等学科中的定理或经过实验检验的规律来建立微分方程模型。 (2)微元分析法 利用已知的定理与规律寻找微元之间的关系式,与第一种方法不同的是对微元而不是直接对函数及其导数应用规律。 (3)模拟近似法 在生物、经济等学科的实际问题中,许多现象的规律性不很清楚,即使有所了解也是极其复杂的,建模时在不同的假设下去模拟实际的现象,建立能近似反映问题的微分方程,然后从数学上求解或分析所建方程及其解的性质,再去同实际情况对比,检验此模型能否刻画、模拟某些实际现象。 一、模型的建立与求解 1.1传染病模型 (1)基础模型 假设:t 时刻病人人数()x t 连续可微。每天每个病人有效接触(使病人治病的接触)的人数为λ,0t =时有0x 个病人。 建模:t 到t t +?病人人数增加 ()()()x t t x t x t t λ+?-=?(1) 0,(0)dx x x x dt λ==(2) 解得: 0()t x t x e λ=(3) 所以,病人人数会随着t 的增加而无限增长,结论不符合实际。 (2)SI 模型
假设:1.疾病传播时期,总人数N 保持不变。人群分为两类,健康者占总人数的比例为s(t),病人占总人数的比例为i(t)。 2.每位病人每天平均有效接触λ人,λ为日接触率。有效接触后健康者变为病人。 依据:患病人数的变化率=Ni(t)(原患病人数)*λs(t)(每个病人每天使健康人变为病人的人数) 建模: di N Nsi dt λ=(4) 由于 ()()1s t i t +=(5) 设t=0时刻病人所占的比例为0i ,则可建立Logistic 模型 0(1),(0)di i i i i dt λ=-=(6) 解得: 01()111kt i t e i -= ??+- ??? (7) 用Matlab 绘制图1()~i t t ,图2 ~di i dt 图形如下, 结论:在不考虑治愈情况下
拉格朗日方程在点的运动分析中的应用
第27卷第l期2000年1月 华北电力大学学报 JournalofNorthChinaEIectricPo聊rUⅡiversity Vm27N01 Jan2000 文章编号:1007—2691(20D0)0l,0083—04 拉格朗日方程在点的运动分析中的应用 王养丽1,王璋奇2,马岗3 (1.西安武警工程学院,陕西西安710086;2.华北电力大学机械工程系,河北保定 071003;3.保定供电局,河北保定07】000) 摘要:利用拉格朗日方程,推证了质点复合运动的加速度合成定理和球坐标系下质点运动加速度的计算公 式。研究结果表明了力学理论中的动力学和运动学之间的统~性。 关键词:质点动力学;质点运动学:加遗度合成 中图分类号:O316文献标识码:A 拉格朗日(Lagr∞ge)方程是解决具有理想的完整约束的质点系统动力学问题的基本方程,通常用来研究复杂的非自由质点系统动力学问题。如用拉格朗日方程建立复杂系统的运动微分方程等。 本文将Lagrange方程应用到质点运动学中,研究质点运动学的基本问题,推证质点运动分析中的有关计算公式和定理。若质点系的动能用壤示,则系统的Lagrange方程可表示为 爿矧一器屯m式中,x表示广义坐标,聩示与广义坐标对应的广义力。动力学理论中的牛顿第二定律描述了质点受力和运动加速度之间的关系,由此得到质点运动加速度的计算公式 a=鲁(2)式中,口表示质点运动的加速度,m表示质点的质量,,为作用在质点上的合力。利用动力学理论研究运动学问题的基本过程是:首先写出质点系统动能的表达式,再由动力学的Lagrange方程式(1)计算与广义坐标相对应的广义力,最后由式(2)计算质点运动的加速度,得到运动学中点运动加速度的计算公式。 本文按照这一思路,推证点的运动学中点复合运动的加速度合成定理和球坐标系中质点运动加速度的计算公式,证明过程具有规范、清晰、物理含义明确,并且易于理解等特点。 1质点复合运动加速度合成定理的推证 质点复合运动是点的运动分析的主要内容,速度合成定理和加速度合成定理是它的核心内容。在现有的教课书中”l,对这两个定理的证明均采用运动分析的几何方法。应用几何方法证明速度合成定理时,证明过程直观、易理解,但对加速度合成定理的证明,尤其是当牵连运动为转动时的加速度合成定 收稿日期:1999-08.30. 作者简介:王养耐(1968一),女,西安武警工程学院物理教研室讲师 万方数据
平衡微分方程的适用范围
1、 平衡微分方程的适用范围 弹性力学、塑性力学、弹塑性力学。 2、 张量:怎样判断? (1)商判则:和任意矢量点积为K-1阶张量的量一定为K 阶张量。 (2)能否满足分量转换规律是判断某个数的集合是否表示一个张量的基本准则。 3、n 维张量的举例 标量零阶张量,矢量为一阶张量,应力、应变为二阶张量,应力、应变之间的弹性关系可用四阶张量表示。 4、▽的意义? ▽为一个梯度,▽2为调和算子(拉普拉斯算子),▽4为重调和算子。 5、柯西应变张量与格林应变张量的区别? 柯西应变张量适用于线弹性小变形,格林应变张量适用于任何情况。 6、任意斜面上的应力的本质是? 平衡微分方程和转轴公式。 7、如何描述正应变,剪应变,体积应变,应力的球张量,应力的偏张量? 对于各向同性材料,正应力引起正应变,引起线元长度变化;剪应力引起剪应变,引起角度的变化;应力的球张量,只引起体积变化,不会引起形状的变化;应力的偏张量,只引起形状变化,不会引起体积的变化。 8、 动力学的平衡微分方程如何表示?(达朗贝尔原理) 根据达朗贝尔原理,把惯性力当作体力来满足力平衡和力矩平衡条件。 9、转轴公式的理论依据:柯西公式。 10、等效应力、等效应变物理意义、公式: 等效应力将6个应力分量的对变形体的作用,等效于一个单向拉伸力的作用;等效应变将6个应变分量等效于一个单向拉伸力所产生的应变。利用实验,就可以直接建立等效应变与等效应力的数值关系 11、体积不可压(v=1/2): 从体积弹性模量() ν213-=E K 来看,当5.0=ν时,K 趋向于无穷大,也就是说体积变化无限小,即表示体积不可压缩。 12、为什么等值拉压是纯剪切 等值拉压时,线元只有角度发生变化,长度有发生变化,故等值拉压是纯剪切。 13、里茨和伽辽金法的物理思想 均是利用利用最小势能原理,寻找满足约束边界条件的试验函数。 14、弹性力学为什么可用逆解法、半逆解法: 解的唯一性定理表明,无论用什么方法求得的解,只要能满足全部基本方程和边界条件,就一定是问题的真解。 15、叠加原理建立在什么条件下: 基本方程和边界条件满足线弹性条件,举例:在线弹性条件下,复杂问题可通过简单叠加处理。 16、圣维南原理的思想: 在物体内,距外加载荷作用处相当远的各点的应力状态,在外载荷的合力和合力矩相同时,与外载荷的具体分布形式关系很小。
平衡方程
力学电子教案( 3、4 ) 【课题名称】 平衡方程及其应用 【教材版本】 李世维主编.中等职业教育国家规划教材—机械基础(机械类).第2版.北京:高等教育出版社,2006 【教学目标与要求】 一、知识目标 1、了解力在坐标轴上的投影; 2、理解平面力系的平衡方程及其应用。 二、能力目标 通过平面力系平衡方程的应用,培养分析问题和解决问题的能力。 三、素质目标 1、了解力在坐标轴上的投影; 2、了解平面力系的平衡方程及其特例。应用平衡方程解决工程实际问题,培养工程意识。 四、教学要求 1、初步了解力在坐标轴上的投影; 2、应用力的平移原理建立平衡方程并能解决工程实际问题。 【教学重点】 1、力在坐标轴上的投影; 2、平衡方程的应用。 【难点分析】 应用力的平移原理建立平衡方程 【教学方法】 教学方法:讲练法、演示法、讨论法、归纳法。 【教学资源】 1.机械基础网络课程.北京:高等教育出版社,2006 2.吴联兴主编.机械基础练习册.北京:高等教育出版社,2006 【教学安排】 教学步骤:讲授与演示交叉进行、讲授中穿插讨论、讲授中穿插练习与设问,最后进行归纳。 【教学过程】 ★复习旧课(5分钟) 1、力的平移原理 2、力偶性质
☉力偶无矩心 ☉力偶无合力 ☉等效力偶可以互换 ★导入新课 平衡方程是在解决工程实际问题中,通过对力的分析,建立起来的力的数学解析表达式,是工程实际中对受力情况的一种定量分析方法。 ★新课教学(80分钟) §2-2 平衡方程及其应用 一、平面受力时的解析表示法 力在坐标轴上的投影 力F在x、y轴上的投影: 力F在x、y轴分力大小: 投影正负规定如下:若此力沿坐标轴的分力的指向与坐标轴一致,则力在该坐标轴上的投影为正值;反之,则投影为负值. ?注意: 力的分力是矢量,而力在坐标轴上的投影是代数量。 ?讨论: 合力是否一定比分力大? 二、平面受力时的平衡方程及应用 1、平面一般力系的简化
5第3章拉格朗日方程
第3章拉格朗日方程 以动力学普遍方程为基础,拉格朗日导出了两种形式的动力学方程,分别称为第一类和第二类拉格朗日方程。将达朗贝尔原理与虚位移原理相结合,建立起动力学普遍方程,避免了理想约束力的出现;再把普遍方程变为广义坐标形式,进一步转变为能量形式,导出了第二类拉格朗日方程,实现了用最少数目的方程描述动力系统;应用数学分析中的乘子法,采用直角坐标形式的普遍方程和约束方程而建立的一组动力学方程,是第一类拉格朗日方程,便于程式化处理约束动力系统问题。拉格朗日方程是分析力学得以发展之源。 3.1 第二类拉格朗日方程 第二类拉格朗日方程是分析力学中最重要的动力学方程,它给出动力学问题一个普遍、简单而又统一的解法。拉格朗日方程只适用于完整约束的质点系。 3.1.1 几个关系式的推证 为方便起见,在推导拉格朗日方程前,先推证几个关系式。 质点系由n个质点、s个完整的理想约束组成,它的自由度数为k= 3n–s,广义坐标数与自由度数相等。该系统中,任一质点M i的矢径r i可表示成广义坐标q1,q2,…,q k和时间t的函数,即 r i=r i(q1,q2,…,q k,t) i=1,2,…,n 它的速度 (3-1) i=1,2,…,n 式中称为h个广义坐标的广义速度,分别为广义坐标和时间的函数,与广义速度没有直接的关系。式(3-1)对求偏导数,则有 (3-2) 这是推证的第一个关系式,它表明,任一质点的速度对广义速度的偏导数等于其矢径对广义坐标的偏导数。为推证第二个关系式,将式(3-1)对广义坐标q j求偏导数, 或 (3-3) 这是第二个关系式,它表明,任一质点的速度对广义坐标的偏导数等于
结构动力学拉格朗日方程
二、拉格朗日方程及其应用 虽然可以直接用牛顿第二定律或达朗贝尔原理建立多自由度系统的运动微分方程,但是在许多情况下应用拉格朗日方程法更为方便。这里用最简单的方式推导拉格朗日方程,以便更好地理解这个被广泛应用的方程的意义。我们知道,对于一能量守恒的系统,系统的动能和势能的总和是不变的,因此,它们的总和对时间的导数等于零,即: 式中:是系统的动能,它是系统广义速度的函数;是系统的势能,它是系统广义坐标 的函数。下面将说明,这两者分别可以用广义坐标和广义速度的二次型表示。 单自由度系统的动能和势能公式如下: 这个结论可以推广到多自由度系统。如下图4-6,使系统各质点产生位移 ,则在处的力为 (a) 设系统有个力作用,则系统总势能为: (b) 把公式(a)代入(b)中,得: (c) 若用矩阵符号,上式可写成: 若把改为更一般的广义坐标符号,上式变为: (d) 上式就是用广义坐标和刚度矩阵的二次型表示的系统势能表达式。
若以表示质量的速度,可以仿照单自由度系统动能的方法表示多自由度系统的动能: 或写成矩阵形式: 我们假设系统的动能只与广义速度有关而与广义坐标无关,对微振动这是成立的。下面来推导拉格朗日方程。为此,对进行全微分: (e) 将对求导,有: 将上式乘以并对从到求和,有: (f) 比较(a),(f)两式可知: (g) 对(g)进行一次微分,得 (h) (h),(e)两式相减可得: 根据守恒系统的原理,有 (i)
因为个广义坐标是独立的,不可能都等于零,因此要上式成立必须使 (j)当系统还作用有除有势力之外的附加力时, 外力在上所作的功将是 令,则可得: (4-8)式中是除有势力之外的所有外力,其中包括阻尼力,阻尼力可表示为: (4-9)
拉格朗日方程对平衡问题的应用
目录 摘要 (1) 关键字 (1) Abstract (1) Key Words (1) 1引言 (1) 2拉格朗日方程的推导 (1) 3在物体平衡上的应用 (3) 2.1平衡体系中拉格朗日的特殊形式 (3) 2.2实例 (4) 4结论 (5) 参考文献 (5)
拉格朗日方程对平衡问题的运用 摘 要:本文通过对拉格朗日方程得推导和对其可以在平衡系统中运用的原因的阐述,来说明了拉格朗日方程在平衡系统中运用的可行性和方便性,并通过举例说明了一类较典型的问题和解决该问题的方法。 关键字:拉格朗日;平衡;约束力;广义坐标 The Use Of The Lagrange Equation T o Balance Abstract: By Lagrange's equations pushed to this article, and can cause the ap -plication of the balanced system set out to illustrate the Lagrangian of the feasibility and ease of application of the balanced system, and illustrates a more typical issues and ways to solve the problem. Key Words : Lagrange; balance; binding; generalized coordinates 1引言 牛顿运动力学]1[作为描述物体运动的重要方程大家都有了解,但本文介绍的拉格朗日方程,在力学体系特别是动力学体系有着举足轻重的地位,同时在平衡问题上也发挥了一定的作用,本文将带领大家了解并熟悉这一方程,和它在平衡问题上的运用。 2拉格朗日方程的推导 拉格朗日方程的判定是由其坐标的性质决定的。直接有广义坐标所表示的方程就是拉格朗日方程[2]。我们常以q 来表示广义坐标,而一个系统所拥有的广义坐标个数是由系统的自由度和约束条件所确定,一般满足s=3n-k (其中那位所含物体的个数,k 是系统的约束条件个数,s 是广义坐标个数)。 当确定了广义坐标后,该系统的i r 物体位置即可表示为: 12(,,,)i i s r r q q q t = (1) 利用上式将达朗贝尔方程[3]中的i r δ和i r 用广义坐标表示出来就可得到拉格朗日方程,推导如下: 由(1)式得 ∑ =??= ?s i i q q r r 1 ααα δ (2)
由哈密顿原理推导拉格朗日方程
由哈密顿原理推导拉格朗日方程 谭建 222010315210236 2010级4班 一、问题重述 试由210t t Ldt δ=?推导()0d L L dt q q αα ???-=?? 二、问题分析及 由于是等时变分,有()d q q dt δδ?= ,和 22 11()0t t t t Ldt L dt δδ==?? (1) 现在来秋L δ。L 是q , q ? , t 的函数,又由于是等时变分,所以有 L L L q q q q δδδ????=+??……………………..(2) ()()()L L d d L d L q q q q dt dt dt q q q q δδδδ?????????==?-????……………….(3) 将(3)代入(2)得 ()()d L d L L L q q q dt dt q q q δδδδ?????=?-+???…………………………(4) 将(4)代入(1)得 2121()(())0t t t t L d L L q q q dt dt q q q δδδ??????+-+=????…………………………….(5) 在12,t t 处0q δ=,所以(5)变为 2 1(())0t t d L L q q dt dt q q δδ???-=???………………………………(6)即 2 1[(())]0t t d L L q dt dt q q δ???-+=???……………………………………(7) q 是独立变量,所以有 ()0d L L dt q q ???-+=??即 ()0d L L dt q q ???-=??此式即为拉格朗日方程
第二章 用拉格朗日方程建立 系统数学模型
第二章用拉格朗日方程建立系统的数学模型 §2.1概述 拉格朗日方程——属于能量法,推导中使用标量,直接对整个系统建模 特点:列式简洁、考虑全面、建模容易、过程规范 适合于线性系统也适合于非线性系统,适合于保守系统,也适合于非保守系统。 §2.2拉格朗日方程 1.哈密尔顿原理 系统总动能 (2-1)系统总势能 (2-2)非保守力的虚功 (2-3)哈密尔顿原理的数学描述: (2-4)2.拉格朗日方程: 拉格朗日方程的表达式: (2-5)(推导:) 将系统总动能、总势能和非保守力的虚功的表达式代入哈密尔顿原理式中(变分驻值原理),有 (2-6)利用分步积分 (2-7)并注意到端点不变分(端点变分为零) (2-8)故
(2-9)从而有 (2-10)由变分学原理的基本引理: (设 n维向量函数M(t),在区间内处处连续,在内具有二阶连续导数,在处为零,并对任意选取的n维向量函数,有 则在整个区间内,有) 我们可以得到: (2-11)即 (2-12)对非保守系统,阻尼力是一种典型的非保守力,如果采用线性粘性阻尼模型,则阻尼力与广义速度成正比,在这种情况下,可引入瑞利耗散(耗能)函数D, (2-13)阻尼力产生的广义非保守力为: (2-14)对于仅受有势力和线性阻尼力作用的系统,其拉格朗日方程为: (2-15)如果系统上还作用了除有势力和阻尼力以外的非保守力,如结构受到的外激励力(对应的广义非保守力可通过非保守力的虚功求得,仍记为),则系统的拉格朗日方程为: (2-16)§2.3 拉格朗日方程在振动系统建模中应用 在某些结构振动问题中,取分离体、确定各分离体的受力情况,然后利用牛顿第二定律建立方程的方法不一定可用,或者很不方便,这时,采用拉格朗日方程来建立振动方程就很方便。 1.集中参数模型中应用
麦克斯韦方程组的几种推导方法的比较
麦克斯韦方程组得几种推导方法及其比较 摘要:介绍麦克斯韦方程组得几种推导方法。从经典、能量守恒、拉格朗日方程得方 面推导得出现有得麦克思维方程组,从侧面说明了麦克斯韦得普遍适用性与有其她一些普遍存在得定理定律得等价性。通过分析三种方法得优缺点,从而加深对麦克斯韦方程组得物理意义得理解,培养科学求真得探索精神。 关键词:拉格朗日方程、麦克思维方程组、能量守恒定律 目录 引言: (1) 1_用经典方法推导麦克斯韦方程组得方法 (2) 1、1 第一方程式得推导 (2) 1、2第二方程式得推导 (3) 1、3第三方程式得推导 (3) 1、4第四方程式得推导 (5) 2_从电磁场能量与能流形式推导麦克斯韦方程组 (6) 3_用拉格朗日方程推导麦克斯韦方程组得方法。 (8) 4_三种方法得比较 (11) 4、1经典方法得优势 (11) 4、2能量方法推导得优缺点 (12) 4、3拉格朗日方程推导得特点 (12) 结束语: (13) 参考文献: (13) 引言: 麦克斯韦方程组就是电磁理论得基本方程,在电磁学中有很重要得地位,在与很多工业领域有很多应用。关于它得推导建立,有我们熟知得经典方法,还有后来得根据拉格朗日方程等分析力学方法推导,以及由能量守恒得方法推导等诸多方法。下面我们来一一推导证明
1_用经典方法推导麦克斯韦方程组得方法 1、1 第一方程式得推导 电荷得库仑定律: F =0ε41πr r q q 3 ' 此电荷得场强为: E =0ε41πr r q 3 对电荷得场强沿着球面求面积分,得到: ?S dS E =∑0εi Q =?V 01dV ρε 电场强度通过面元d S 得通量为: dS E ? =Ecos θds=204r Q πεcos θds 。 θ就是d S 与E 得夹角,cos θds/2r 位球面得立体角元。所以包裹电荷得闭合曲面 与球面得积分就是相同得。由于对电荷得场强求面积分只与包裹着得电荷有关系,所以积分得面没有关系。 又因为电荷得体密度得定义: ρ=V q 根据斯托克斯公式可以把面积分化成散度得体积分: ???V dV E =ρV/0ε 得到: 0/ερ=??E 等效都就是在真空下得方程式,如果在介质下得束缚电荷密度p ρ,那么: E ??=(ρ+p ρ)/0ε。定义电位移矢量: D =0ε E +P
由哈密顿正则方程证明拉格朗日方程
由哈密顿正则方程证明拉格朗日方程 姓名:谭建学号:222010315210236 学院:物理学院年级:2010级4班 一、 问题重述 已知H q p α? ??=?,H p q α???=-?,H L t t ??=-??(1,2,...,)s ?= 求证拉格朗日方程()0d L L dt q q ???-=?? 二、 问题分析及证明 H 是q,p,t 的函数,L 是q,q ?,t 的函数,因此我们要先将H 换成q,q ? ,t 的函数。勒让德变换有 1s H L H p p ααα =?=-+?∑……………………………………..(1) 1(( ))s H H dL dH d p dp p p ααααα =??=-++??∑…………..(2) 此处的H 仍是q,p,t 的函数,因此将H 全微分有 1()s H H H dH dp dq dt p q t αααα α=???=++???∑…………….(3) 将(3)式带入(2)得 1 (())s H H H dL d p dq dt p q t ααααα=???=--???∑………..(4) 再将已知条件H q p α???=?,H p q α???=-?,H L t t ??=-??(1,2,...,)s ?= 代入(4)有1 ()s L dL p d q p dq dt t αααα???=?=++ ?∑………………(5) 而L 是q,q ?,t 的函数,即L (q,q ?,t )。我们将L 全微分 1()s L L L dL dq d q dt q t q ααααα??=???=++???∑ (6)
比较(5)、(6)两式我们可得到如下公式 L p q αα??=?,L p q αα ??=? 所以我们可得到()d L p dt q αα???=?,L p q αα??= ? 所以有()0d L L p p dt q q αα?????-=-=??……………..(7) 第七式即为拉格朗日方程。 三、 参考资料 分析力学,勒让德变换,哈密顿正则方程
拉格朗日方程
学年论文 题目:光电效应的应用 学生:张韩佩 学号: 201212020104 院(系):理学院 专业:应用物理学 指导教师:罗道斌 2014 年 11月15日
目录 摘要......................................................... 关键字..................................................... Abstract (1) Key Words..................................................................1. 1引言 (1) 2 光电效应的概念 (1) 3光电效应的实验规律 (2) 4光电效应和经典理论的矛盾处 (5) 5光电效应的科学释 (7) 6光电效应在近代技术中的应用.......................... 6.1常用的光学器件............ 6.2常用光学器件的检测 7结束语 参考文献 (7)
光电效应的应用 物理121:指导教师:罗道斌 (陕西科技大学理学院陕西西安 710021) 摘要 本文介绍了光电效应的发现及其发展,简要叙述了爱因斯坦的光量子假说对光电子效益的解释及其通过实验来验证了爱因斯坦的光量子假说对光电效应解释的正确性,并介绍了光电效应在现代科学技术中的应用。 关键字:光电效应;光量子;频率;相对论 The Use Of The Lagrange Equation To Balance Abstract: By Lagrange's equations pushed to this article, and can cause the ap -plication of t he balanced system set out to illustrate the Lagrangian of the feasibility and ease of applicatio n of the balanced system, and illustrates a more typical issues and ways to solve the problem. Key Word s: Lagrange; balance; binding; generalized coordinates 1引言 牛顿运动力学[1]作为描述物体运动的重要方程大家都有了解,但本文介绍的拉格朗日方程,在力学体系特别是动力学体系有着举足轻重的地位,同时在平衡问题上也发挥了一定的作用,本文将带领大家了解并熟悉这一方程,和它在平衡问题上的运用. 2拉格朗日简介 拉格朗日方程 Lagrange equation 从虚位移原理可以得到受理想约束的质点系不含约束力的平衡方程,而动静法(达朗贝尔原理)则将列写平衡方程的静力学方法应用于建立质点系的动力学方程,
第十五章拉格朗日方程习题解答
习 题 15-1 如图15-7所示的升降机,在主动轮C 上作用一驱动力偶M ,使质量m 1的物体A 上升。已知平衡物B 的质量为m 2,主动轮C 和从动轮D 都为均质圆轮,半径和质量分别为r 和m 3。如不计胶带质量,试求A 物的加速度。 图15-7 a m F A 1I = a m F B 2I = ra m r a r m M M D C 323I I 2 1 )(21== = 动力学普遍方程 0δ)(δ)(δ) (I 2I 1I I =-++---s F W s F W r s M M M B A D C 0)()(1 )2121(221133=-++---a m g m a m g m r ra m ra m M r m m m gr m m M a )()(32112++-+= 15-2 图15-8所示调速器由两个质量各为m 1的滑块及质量为m 2的平衡重块组成,长l 的杆不计重量,弹簧刚度为k ,当? = 0时,为原长。若调速器绕铅垂轴等角速度旋转,试求ω与θ的关系。 图15-8 θωsin 211I l m F = )cos 1(θ-=kl F 动力学普遍方程 0δ)(δ22211I =+-r F g m r F θθcos δsin δ21r r = θtan δδ12r r = 故 0tan δ)]cos 1([δsin 212121=-+-θθθωr kl g m r l m θ θωcos 2) cos 1(12 2l m kl g m -+= 15-3 如图15-9所示,板DE 质量为m 1,放在三个质量均为m 2的滚子A 、B 和C 上,今在板上作用一水平向右的力F ,使板与滚子运动。如板与滚子,以及滚子与水平面之间均无滑动,试求板DE 的加速度.滚子可视为均质圆柱,不计滚动摩擦。 图15-9 DE a m F 11I = 2/22I DE a m F = DE DE O ra m r a r m M 222I 4 1 )2(21== 动力学普遍方程 0δ3δ3δ)(2I 22I 11I =---?C M r F r F F
四、完整约束保守系的拉格朗日方程
四、完整约束保守系的拉格朗日方程: 上次课我们导出了在完整约束下的第二类拉格朗日方程: ),2,1(s Q q T q T dt d ?==??-??αααα ,并用它解了一些题目。考虑到如果我们要研究的系统所在的内外力场均是保守力场,或者其它作用于系统的力均不作虚功。在这种情况下,上面这 条完整约束下的第二类拉格朗日方程还可以进一步简化。这次课准备要讲的内容就是,先由 这条拉格朗日方程推出完整约束下保守系的拉格朗日方程,并举例应用,然后再讨论完整约 束保守系的拉氏方程的一次积分。我们由前面学过的知识可以知道,如果系统处在保守力场 中,保守力系必有与其对应的势能V ,此势能是系统中各个质点的位置函数,即: V=V(n r r r ??21),且有V F i -?=1 它的三个分量表达式为:i iz i iy i ix z V F y V F x V F ??-=??-=??-=,,。如果将i r 用广义坐标表示:),(t q r r i i = 则势能也就是广义坐标及时间t 的函数:V=V(q ,t),由此我们很容易求得在保守力场中广义力αQ 的 表达式。由广义力的定义得: ←??? ? ??????+????+????-=????-=???=∑∑∑i i i i i i i i i i i i q z z V y y y V q x x V q r V q r F Q ααααααα [根据复合函数的微分规则可知其结果为α q V ??-=]将此结果代入第二类拉格朗日方程就可将它写成为:0)(=?-?-??→??-=??-??α ααααq V T q T dt d q V q T q T dt d ∵0=??αq V ∴左边的式子又可写成为:()()0=?-?-?-?α αq V T q V T dt d 在这里就定义:V T L -=,L 称作为拉格朗日函数,简称为拉氏函数,它就等于系统的动能与势能之差。那么上式就可写成为: ()s q L q L dt d ?==??-??,2,10ααα 这个方程就是完整约束保守系的拉格朗日方程。有时也叫它为拉格朗日方程或拉氏方程。由前面的推导可知这个方程适用的条件是:完整约束,保守力 系或者除了保守力系之外的其它力均不作虚功,T 和V 即L 都是相对惯性系的量。下面我 们就举个例子用它来求解。应用保守系拉氏方程解题的步骤基本上和用第二类拉氏方程解题 的步骤相同,只是将上次课中的求广义力这一步改成为求势能V 及拉氏函数L 就可。在这 里要注意,势能必须包含系统内力的势能和外力的势能。还有由于保守系的拉氏方程中包含