基于TM、ETM+遥感影像洞庭湖冬陆夏水洲滩变化信息提取研究

基于TM/ETM+遥感影像洞庭湖“冬陆夏水”洲滩变化信息提取研究
龙芳
摘要:利用TM/ETM+影像,提取1987,1998,2003年三个时段洞庭湖“冬陆夏水”洲滩。运用改进归一化差异水体指数(MNDWI)提取丰水期和枯水期的水体,得到相应年份的“冬陆夏水”洲滩,并对近15年的洲滩面积变化进行监督,分析发现,研究区的“冬陆夏水”洲滩面积一直在增加,且有泥滩地→苔草滩地→芦苇滩地的变化趋势,是潜在的钉螺孳生地。为进一步研究钉螺孳生地生态环境做前期工作。
1 引言
日本血吸虫病是我国流行的一种重大传染病,日本血吸虫的唯一中间宿主是钉螺[1],而洞庭湖区是其主要分布区之一。洞庭湖区的钉螺分布属于湖沼型,又称江湖洲滩型。已有大量的研究证明,湖沼型地区钉螺的孳生地水淹时间一般为3-8个月,呈现“冬陆夏水”的生态环境[2,3]。本研究根据湖沼地区钉螺孳生地“冬陆夏水”的特性,利用遥感和地理信息系统等技术自动提取三个时段洞庭湖区域“冬陆夏水”的洲滩,并对其面积变化进行监督,为进一步确定钉螺孳生地做前期工作。
2研究区概况及数据源
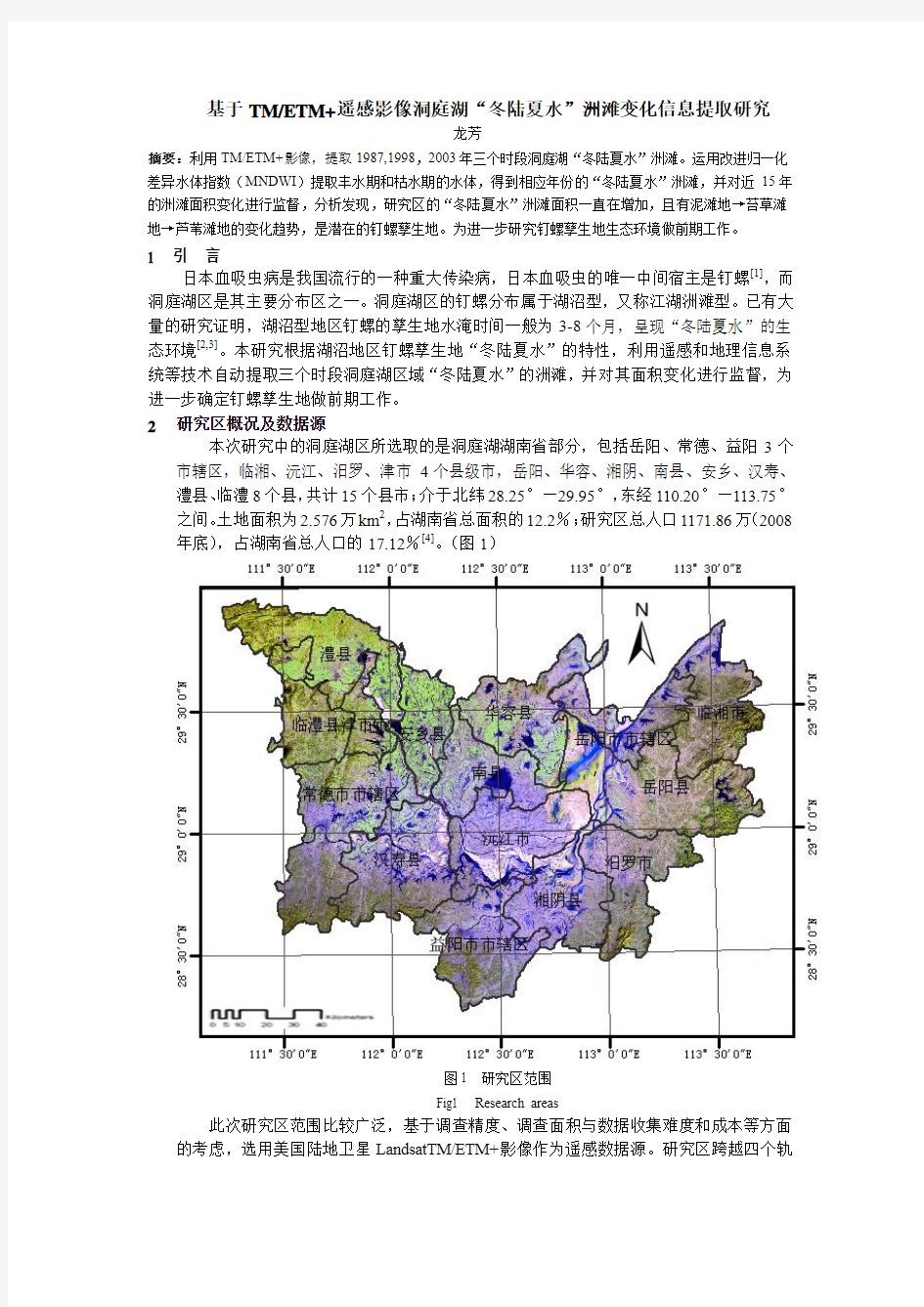
本次研究中的洞庭湖区所选取的是洞庭湖湖南省部分,包括岳阳、常德、益阳3个市辖区,临湘、沅江、汨罗、津市4个县级市,岳阳、华容、湘阴、南县、安乡、汉寿、澧县、临澧8个县,共计15个县市;介于北纬28.25°—29.95°,东经110.20°—113.75°之间。土地面积为2.576万km2,占湖南省总面积的12.2%;研究区总人口1171.86万(2008年底),占湖南省总人口的17.12%[4]。(图1)
图1 研究区范围
Fig1 Research areas
此次研究区范围比较广泛,基于调查精度、调查面积与数据收集难度和成本等方面的考虑,选用美国陆地卫星LandsatTM/ETM+影像作为遥感数据源。研究区跨越四个轨
道,分别为123-39、123-40、124-39、124-40。洞庭湖的丰水期为6-9月,枯水期为12-3月,由于数据的可获得性,可操作性,无云和清晰度等问题,尽可能的搜集符合或临近年月份的影像。其丰水期和枯水期影像时相分别选取1987年12月与1991年7月;1998年12月与1998年8月;2003年1月与2000年7月(数据来源:https://www.360docs.net/doc/ac8324482.html,/)。其中123-40和124-40轨道上的影像对研究区的贡献率达到80%,主要的信息从这两景影像得到,因此认为该次研究搜集的四景数据能反应研究区相应年份的景观状况。搜集到的遥感影像数据如表1。
表1 遥感数据图幅号及时间
Table Remote sensing images
年份(数据类型)
季节
(水情)
图幅号-时间
123-39 123-40 124-39 124-40
1987-12(TM) 枯水期2006-11 1987-12 1992-07 1987-11
1991-07(TM) 丰水期1991-7 1991-07 1992-07 1991-07
1998-12(TM) 枯水期2006-11 1998-02 1992-07 1998-12
1998-08(TM) 丰水期2005-09 1998-04 1992-07 1998-08
2003-01(ETM+) 枯水期2003-01 2003-01 2002-01 2002-11
2000-07(ETM+) 丰水期2002-07 2000-06 2000-09 2000-07 其他资料包括:2008年1:50000精校正影像,1:25000湖南省行政区界图,80年代、1995年、2000年土地利用现状图等。
3数据预处理
传感器在成像时会受到大气、地形、天气、系统等的影像,原始的遥感影像会存在着地理变形,影像图像信息提取的精度。因此,要对遥感影像进行预处理。这里主要是对遥感影像进行几何精校正与配准,影像的镶嵌和裁切。
3.1 遥感影像几何校正与配准
选择四次多项式进行几何精校正,在影像上选取适当数量的控制点,控制点要均匀分布在整幅影像内,且要保证选点的质量。本次研究实际应用中控制点均在30点以上,地面控制点的精度误差控制在0.4个像元以内,并采用精度较高的立方卷积内插法(Cubic Convolution)进行重采样,确保影像校正精度。
3.2遥感影像的镶嵌于裁剪
研究区范围跨越了4个轨道号上所拍摄的遥感影像,因此需要将每个时期的四幅影像进行拼接,然后根据研究区所在的15个县市的行政区域边界对拼接影像进行裁剪,得到我们所需的研究区范围。
4确定“冬陆夏水”的区域
洞庭湖区域的钉螺分布属于湖沼型,钉螺孳生地水淹时间一般为3-8个月[2],呈现“冬陆夏水”的生态环境。“冬陆夏水”的范围即为丰水期和枯水期水域之差。洞庭湖区的丰水期为6-9月,枯水期为12-3月,本次研究选用了这几个月份之类的遥感影像。
对获取“冬陆夏水”区域的关键是对水体信息的提取。目前,国内外对水体的提取已有大量的研究,提出了多种方法。主要分为单波段法和多波段法[5]。单波段法主要利用用水体在近红外波段的强吸收性以及植被和干土壤在此波长范围的强反射性特点,选用遥感数据的近红外波段选择阈值来提取水体[6],但这种方法难以去除水体中杂有的阴影。多波段法利用多波段间的优势综合提取。如谱间分析法、比值法、决策树法和水体指数法等。谱间分析法和决策树法广泛应用,但通常比较复杂[7,8]。比值法利用比值计算快速提取水体信息,但无法彻底抑制与水体无关的背景信息。为解决这一问题,Mcfeeters 提出了简单易行的归一化水体指数(NDWI)[9],但此方法对城市范围内的水体提取不
成功,且容易与建筑物混杂。在此基础上,徐涵秋提出了改进归一化差异水体指数(MNDWI:Modified NDWI),改善了这一问题[10]。该方法要求遥感影像有对应于TM5即中红外波段的信息,本次研究选用的TM/ETM+数据符合这一要求。计算公式:
MNDWI=(Green-MIR)/(Green+MIR) (1) 其中MIR为中红外波段,即TM/ETM+的第5波段;Green为绿光波段,即TM/ETM+的第2波段。
4.1水体及阴影的提取
应用改进水体指数(MNDWI)分别提取三个年份的丰水期和枯水期的MNDWI。
利用ENVI中的波段运算模块实现。通过反复试验,确定MNDWI>0 时的区域为水体。
对提取后的水体与原始影像进行人工对比判读,发现结果中有夹杂大量阴影,主要分布在山地部分,这是由于山体阴影的影响,使得近红外,中红外波长在阴坡面的反射能量特别低,造成了水体与阴影光谱特征相似。因此,去除山体阴影是提取水体信息的关键。
4.2区分水体和山体阴影
在本次研究中,阴影主要是由地形起伏造成的山体阴影,主要是在山地森林一带,阴影分布处多有植被覆盖,而水体一般无植被覆盖,因此可采用差异性植被指数(NDVI)得到由植被覆盖区域,进一步区分水体和阴影。计算公式为:
NDVI=(NIR-R)/(NIR+R) (2) 其中NIR为近红外波段,即TM/ETM+的第4波段;R为红光波段,即TM/ETM+的第3波段。通过光谱亮度统计,反复试验,确定区分阴影和水体的条件为NDVI<-0.09。
符合条件的为水体,否则就是阴影。由此得出枯水期和丰水期的水系(图2)。
图2 枯水期和丰水期水体提取
Fig2 Water extraction of the Dry season and Rainy season
4.3提取“冬陆夏水”区域
在得到了水体之后,只要用丰水期减去枯水期的水体,就可以得到该年“冬陆夏水”的区域。其计算公式为:
I=(MNDWIwet>a∩NDVIwet
5三个时段“冬陆夏水”区域面积变化
5.1 计算“冬陆夏水”洲滩面积
将提取的“冬陆夏水”区域在ARCGIS软件的支持下,转换为多边形,将多边形
图与枯水期影像叠加显示,可发现其中夹杂一些小图斑,主要分布在水田部分。这是由于在丰水期水田大多蓄水,而在枯水期则多为旱地造成的影像。因此要对照遥感影像去除掉在水田部分的细小图斑,以免对结果造成影像。在ARCGIS中可自动计算每个多边形的面积,即为“冬陆夏水”的面积。
在ARCGIS中对三个时段的“冬陆夏水”的面积做叠置分析,分别得出某一时段内减少和增加的区域面积。
5.2对增加的区域监督分类
为了区分1987-1998年和1998-2003年增加的“冬陆夏水”洲滩区域的地物类型,对其区域范围的遥感图像做监督分类。训练区的选择是依据相应年份的土地利用现状图和目视解译的方法,样本训练区要就有较好的代表性和独立性,通过对选取的样本作统计学方法的质量评价,结果见表2,3。
表2 1998年12月影像试验样本之间的分离值
Table2 Separate value among test samples of December 1998
泥滩地苔草滩地芦苇滩地
泥滩地 2.000 1.978 1.877
苔草滩地 2.000 1.998
芦苇滩地 2.000
表3 2003年1月影像试验样本之间的分离值
Table3 Separate value among test samples of January 2003
泥滩地苔草滩地芦苇滩地
泥滩地 2.000 1.955 1.813
苔草滩地 2.000 1.832
芦苇滩地 2.000
分离值大于等于1.8时符合分类要求,独立性较好,能够有效地区分。从表2,3可以看出,各类的分离值均大于1.8,因此能够被有效地区分。
本次研究利用最大似然法对研究区进行监督分类。最大似然法(Maximum Likelihood Classification MLC)假定每个波段的每一类统计都均匀分布,并计算给定像元属于某一特定类别的似然度,有较好的统计特性分类[11]。分类结果如图3:
图3 2003年分类图
Fig3 Classification figure of 1998-2003
对分类后的精度做评价,结果表明,1987-1998年增加区域总体分类精度为
97.3693%,Kappa系数为0.9478;1998-2003年增加区域总体分类精度为99.7755%,
Kappa系数为0.9955。错分误差、漏分误差、发生器精度和用户精度见表4,5。
表4 1998年12月遥感图像分类方法精度评价(%)
Table4 A ccuracy assessment for the classification method of December 1998
错分误差漏分误差发生器精度用户精度
泥滩地0.08 4.13 95.87 99.92
苔草滩地0.49 0.05 99.95 99.51
芦苇滩地44.51 1.12 98.88 55.49
表5 2003年1月遥感图像分类方法精度评价(%)
Table5 A ccuracy assessment for the classification method of January 2003
错分误差漏分误差发生器精度用户精度
泥滩地0.03 0.29 99.71 99.97
苔草滩地0.13 0.00 100.00 99.87
芦苇滩地 2.05 0.42 99.58 97.95
可看出总体分类精度比较高,相比之下,芦苇滩地的错分误差较大。这是因为分类的遥感影像都是在冬季枯水期,芦苇已经被收割,在影像上与泥滩地色调相近,容易引起错分。可参考土地利用图和夏季丰水期的影像进行修改。
6结果及讨论
“冬陆夏水”区域
在ARCGIS中计算“冬陆夏水”区域面积,可得到1987年为12.74万hm2,1998年为19.88万hm2,2003年为22.46万hm2(图4)。1987年到1998年近10间增加的“冬陆夏水”
面积为9.03万hm2,减少的面积为1.30万hm2,总体来说增加了7.64万hm2。其中增加的
部分50.77%为泥滩地,46.85%为苔草滩地,2.38%为芦苇滩地。1998年到2003年增加面积为3.64万hm2,减少的面积为1.05万,总体来说增加了2.59万hm2。其中57.32%为泥滩地,33.2%为苔草滩地,9.48%为芦苇滩地。从1987年到2003年的近15年中,32.67%淤积的泥滩地转变为苔草滩地,7.93%淤积的泥滩地转变为芦苇滩地(图5)。
图4 1987-2003年“冬陆夏水”洲滩
Fig4 marsh of 1987-2003
图5 1987-2003年湿地变化
Fig5 Wetland changes of 1987-2003
“冬陆夏水”洲滩的扩张,主要原因是洞庭湖的泥沙淤积。洞庭湖的三(四)口四水带来的大量泥沙沉积在洞庭湖湖盆。研究表明,洞庭湖总体上淤积量大于冲刷量,处于淤积状态[12]。随着泥沙的淤积,新的泥沙滩地出现;随着时间的推移和泥沙继续淤积、扩张,苔草等草本植物开始在洲滩上生长;之后芦苇等植物生长。无草不见螺[13,14],且一定类型的植被对钉螺孳生地有指示作用[15,16]。已有研究发现,江滩型钉螺孳生地大多为苔草,芦苇等有植被区域[17,18]。有研究表明新形成的洲滩露出水面3-5年后植被生长,又3-5年后钉螺孳生[19]。从1990年—2003年湖南省垸外钉螺面积变化情况(图6)可看出[20,21],由于实际原因,不能像垸内得带严格的控制和治理,属于垸外的“冬陆夏水”洲滩区域的钉螺面积总体上处于一种增长的状态,这也是由于泥沙的淤积造成“冬陆夏水”洲滩的不断扩张,从泥滩地发展为苔草滩地到芦苇滩地,进而形成新的钉螺孳生地。而人类的活动则起到的扩散血吸虫病
的感染,阳性钉螺孳生地增加,这样一个恶性循环使的血吸虫病进一步的传播。
本研究利用丰水期和枯水期的遥感影像,提取三个时段洞庭湖“冬陆夏水”洲滩面积,对比分类发现由于泥沙淤积,洞庭湖“冬陆夏水”洲滩一直处于扩张的趋势,且随时间推移发展为植被洲滩,成为潜在的钉螺孳生地,为进一步确定钉螺孳生地做前期工作。在之后可搜集相关钉螺数据,对其植被环境,高程,土壤类型,温度,湿度等影像钉螺孳生的生态环境做进一步的研究。
图6 湖南省1990-2003年钉螺面积变化情况(hm2)
Fig6 Changes of snail area in Hunan Province,1990-2003(hm2)
参考文献
[1] 周晓龙.实用钉螺学[M].北京:科学出版社,2005
[2] 周述龙,林建银,夏刚等.血吸虫学[M].北京:科学出版社,2001
[3] 杨德平.应用遥感技术快速确定钉螺孳生地.国际医学寄生虫病杂志[J].2006,33(5):268-272
[4] 湖南统计年鉴2009[DB/OL]
[5] Rundquist D,Lawon M,Queen L,et al.The relationship between the timing of summer season rainfall events and lake surface area[J].Water Resources Bulletin,1987,23(3):493-508
[6] Rundquist D,Lawon M,Queen L,et al.The relationship between the timing of summer season rainfall events and lake surface area[J].Water Resources Bulletin,1987,23(3):493-508
[7] 杜云艳,周成虎.水体的遥感信息自动提取方法[J].遥感学报,1998,2(4):264-269
[8] 都金康,黄永胜,冯学智等.SPOT卫星影像的水体提取方法及分类研究[J].遥感学报,2001,5(3):214-219
[9] McFeeters S K.The Use of Normalized Difference Water Index(NDWI) in the Delineation of Open Water Features[J].International Journal of Remote Sensing,1996,17(7):1425-1432
[10] 徐涵秋.利用改进的归一化差异水体指数(MNDWI)提取水体信息的研究[J].遥感学报,2005,9(5):589-595
[11] J.A.Richards, 1994, Remote Sensing Digital Image Analysis, Springer-V erlag, Berlin, p.340
[12] 李景保,尹辉,卢承志,毛德华,周和平.洞庭湖区的泥沙淤积效应. 地理学报[J].2008,63(5):514-523
[13] 李雍龙.人体寄生虫学[M]. 北京:人民卫生出版社. 1992(第二版)
[14] 中华人民共和国卫生部疾病控制司.血吸虫病防治手册[M].上海:上海科技出版社,2000
[15] 林丹丹,张绍基.鄱阳湖地区地理环境与血吸虫病传播[J].中华流行病学杂志,2003
[16] 方金城,吴昭武.湖南省防治血吸虫病研究[M].长沙湖南人民出版社,2002
[17] 林涛,姜庆五,张世清等.遥感图像对江滩型血吸虫病疫区分类研究[J].中华预防医学杂
志,2000,34(5):263-265
[18] 赛晓勇,张治英.卫星遥感技术在钉螺监测中的应用[J].华南预防医学,2003,29(5)
[19] 徐伏牛,吴正兴,吴维铎,等.江滩型地区血吸虫病流行因素及优化防治对策的研究[J].中国血吸虫病防治杂志,1996,18(6):325-330
[20] 易尚辉,吕媛,易银沙.1996 ~2005年湖南省钉螺消长趋势分析. 中国血吸虫病防治杂志[J].2007,1(6):441-443
[21]杨美霞,谭红专.湖南省1990一1999年钉螺面积变化情况分析. 实用寄生虫病杂志[J]. 2001,9(3):101-103
erdas遥感专题信息提取与专题图制作
遥感专题信息提取与专题图制作设计报告 1.课程设计的目的和意义 本次课程设计的目的主要是为了加深理解和巩固遥感原理与应用的有关理论知识;熟悉遥感图像处理的方法和步骤,学习运用ERDAS软件对遥感图像进行几何纠正、图像镶嵌、图像融合、自动分类以及专题图制作等处理。锻炼独立分析问题和解决问题的能力,培养良好的工作习惯和科学素养,为今后工作打下良好的基础。 2.课程设计的原理和方法 2.1课程设计原理 2.1.1 图像预处理 ERDAS软件默认的文件格式是img格式,因此首先需要将实习数据由TIFF 格式转换为img格式图像。 多波段影像包含的信息量较大,实习中将6个单波段影像合成多波段影像进行处理。 Spot影像需具有地理信息,要将影像头文件信息添加进去。 2.1.2几何纠正 遥感所获取的数据,均存在几何畸变。因此需要对图像进行几何纠正。几何纠正的原理是将图像数据投影到平面上,使其符合地图投影系统。而将地图投影系统赋予图像数据的过程,称为地理参考。由于所有地图投影系统都遵循一定的地图坐标系统,因此几何纠正的过程包含了地理参考过程。在实习过程中,采用了一次多项式法进行几何纠正。 2.1.3图像镶嵌 因研究范围的要求,需要在几何上将左右两幅图像连接在一起,并且保证拼接后的图像反差一致,色调相近,没有明显的接缝。遥感影像在镶嵌之前,必
须包含投影信息、地理坐标信息,还要有相同的波段数。当然,在挑选遥感数据时,要尽可能选择成像时间和成像条件相近的遥感图像,要求相邻影像的色调一致。 2.1.4图像裁剪 在实际工作中,经常需要根据研究工作范围对图像进行裁剪,按照ERDAS 实际图像分幅裁剪的过程,可以将图像分幅裁剪分为两种类型:规则分幅裁剪和不规则分幅裁剪。 规则分幅裁剪是指裁剪图像的边界范围是一个矩形,通过左上角和右下角两点的坐标,就可以确定图像的裁剪位置,整个裁剪过程比较简单。 不规则分幅裁剪是指裁剪图像的边界范围是任意多边形,无法通过左上角和右下角两点的坐标确定裁减位置,而必须事先生成一个完整的闭合多边形区域,可以是一个AOI多边形,也可以是ArcInfo的一个Polygon Coverage,针对不同的情况采用不同的裁剪过程。 2.1.5图像融合 图像融合是指将多源信道所采集到的关于同一目标的图像数据经过图像处理和计算机技术等,最大限度的提取各自信道中的有利信息,最后综合成高质量的图像,以提高图像信息的利用率、改善计算机解译精度和可靠性、提升原始图像的空间分辨率和光谱分辨率,利于监测。 2.1.6图像分类 图像分类就是基于图像像元的数据文件值,将像元归并成有限的几种类型、等级或数据集的过程。常规图像分类主要有两种方法:监督分类与非监督分类。 2.2课程设计方案
遥感信息智能化提取方法
遥感信息智能化提取方法 目前,大部分遥感信息的分类和提取,主要是利用数理统计与人工解译相结合的方法。这种方法不仅精度相对较低,效率不高,劳动强度大,而且依赖参与解译分析的人,在很大程度上不具备重复性。尤其对多时相、多传感器、多平台、多光谱波段遥感数据的复合处理,问题更为突出。在遥感影像相互校正方面,一些商业化的遥感图像处理软件,虽然提供了简单的影像相互校正和融合功能,但均是基于纯交互式的人工识别选取同名点,不仅效率非常低,而且精度也难于达到实用要求。因此,研究遥感信息的智能化提取方法对于提高遥感信息的提取精度和效率具有重要意义。 1.遥感图像分类 遥感图像分类是遥感图像处理系统的核心功能之一,它实现了基于遥感数据的地理信息提取,主要包括监督分类,非监督分类,以及分类后的处理功能。非监督分类包括等混合距离法分类(Isodata)等。监督分类包括最小距离(Minimum Distance)分类、最大似然(Maximum Likehood)分类、贝叶斯(Bayesian)分类、以及波谱角分类、二进制编码分类、AIRSAR散射机理分类等。 自动分类是计算机图像处理的初期便涉及的问题。但作为专题信息提取的一种方法,则有其完全不同的意义,是从应用的角度赋予其新的内容和方法。传统的遥感自动分类,主要依赖地物的光谱特性,采用数理统计的方法,基于单个像元进行,如监督分类和非监督分类方法,对于早期的MSS这样较低分辨率的遥感图像在分类中较为有效。后来人们在信息提取中引入了空间信息,直接从图像上提取各种空间特征,如纹理、形状特征等。其次是各种数学方法的引进,典型的有模糊聚类方法、神经网络方法及小波和分形。 近年来对于神经网络分类方法的研究相当活跃。它区别于传统的分类方法在于:在处理模式分类问题时,并不基于某个假定的概率分布,在无监督分类中,从特征空间到模式空间的映射是通过网络自组织完成的,在监督分类中,网络通过对训练样本的学习,获得权值,形成分类器,且具备容错性。人工神经网络 (ANN) 分类方法一般可获得更高精度的分类结果,因此 ANN方法在遥感分类中被广泛应用,特别是对于复杂类型的地物类型分类,ANN 方法显示了其优越性。如 Howald(1989)、McClellad(1989)、 Hepner(1990)、T.Yosh ida(1994)、K.S.Chen(1995)、J.D.Paola(1997) 等利用 ANN 分类方法对 TM 图像进行土地覆盖分类,在不同程度上提高了分类精度;Kanellopoulos(1992) 利用 ANN方法对 SPOT 影像进行了多达20类的分类,取得比统计方法更精确的结果;G.M.Foody(1996)用ANN对混合像元现象进行了分解;L.Bruzzone 等 (1997) 在 TM-5 遥感数据、空间结构信息数据、辅助数据(包括高程、坡度等)等空间数据基础下,用 ANN 方法对复杂土地利用进行了分类,比最大似然分类法提高了 9% 的精度。与统计分类方法相比较,ANN 方法具有更强的非线性映射能力,因此,能处理和分析复杂空间分布的遥感信息。2.基于知识发现的遥感信息提取
遥感专题讲座——影像信息提取(四、面向对象特征提取)
面向对象的影像分类技术 “同物异谱,同谱异物”会对影像分类产生的影响,加上高分辨率影像的光谱信息不是很丰富,还有经常伴有光谱相互影响的现象,这对基于像素的分类方法提出了一种挑战,面向对象的影像分类技术可以一定程度减少上述影响。 本小节以ENVI中的面向对象的特征提取FX模块为例,对这种技术和处理流程做一个简单的介绍。 本专题包括以下内容: ??●面向对象分类技术概述 ??●ENVI FX简介 ??●ENVI FX操作说明 1、面向对象分类技术概述 面向对象分类技术集合临近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间,纹理,和光谱信息来分割和分类的特点,以高精度的分类结果或者矢量输出。它主要分成两部分过程:影像对象构建和对象的分类。
影像对象构建主要用了影像分割技术,常用分割方法包括基于多尺度的、基于灰度的、纹理的、基于知识的及基于分水岭的等分割算法。比较常用的就是多尺度分割算法,这种方法综合遥感图像的光谱特征和形状特征,计算图像中每个波段的光谱异质性与形状异质性的综合特征值,然后根据各个波段所占的权重,计算图像所有波段的加权值,当分割出对象或基元的光谱和形状综合加权值小于某个指定的阈值时,进行重复迭代运算,直到所有分割对象的综合加权值大于指定阈值即完成图像的多尺度分割操作。 影像对象的分类,目前常用的方法是“监督分类”和“基于知识分类”。这里的监督分类和我们常说的监督分类是有区别的,它分类时和样本的对比参数更多,不仅仅是光谱信息,还包括空间、纹理等信息。基于知识分类也是根据影像对象的熟悉来设定规则进行分类。 目前很多遥感软件都具有这个功能,如ENVI的FX扩展模块、易康(现在叫Definiens)、ERDAS的Objective模块、PCI的FeatureObjeX(新收购)等。 表1为三大类分类方法的一个大概的对比。 类型基本原理影像的最小单元适用数据源缺陷 传统基于光谱的分类方 法地物的光谱信息 特征 单个的影像像元 中低分辨率多光谱 和高光谱影像 丰富的空间信息利 用率几乎为零 基于专家知识决策树根据光谱特征、空 间关系和其他上 下文关系归类像 元 单个的影像像元多源数据知识获取比较复杂 面向对象的分类方法几何信息、结构信 息以及光谱信息 一个个影像对象 中高分辨率多光谱 和全色影像 速度比较慢
基于遥感数据的城市绿地信息提取研究进展
基于遥感数据的城市绿地信息提取研究进展1 吕杰,刘湘南 中国地质大学(北京)信息工程学院,北京 (100083) E-mail:jasonlu168@https://www.360docs.net/doc/ac8324482.html, 摘要:本文对目前城市绿地信息提取研究现状进行了总结,对其中的利用航空遥感数据提取植被信息、卫星遥感提取植被信息、高分辨率遥感植被信息以及高光谱遥感植被信息研究进展进行了介绍,并从中分析提出遥感数据提取城市绿地信息存在的问题,对于存在的混合像元的问题,本文指出混合像元分解是解决存在问题的关键。 关键词:遥感,城市绿地,信息提取,混合像元 中图分类号:TP 7 1.引言 随着城市规模的不断扩大,自然环境正受到越来越严重的破坏,特别是大量的植被被高楼大厦取代,导致原有的生态系统严重失衡。而植被是环境的天然调节器,因此,无论在新城区还是老城区,绿化都显得尤其重要。对于土地资源极为珍贵的特大城市来说,良好的绿地规划方案可以有效地提高绿化生态环境效益。 另一方面,随着社会和经济的发展,城市化步伐在不断加快,城市规模日渐扩大,因此,城市正面临着一系列的生态和环境问题,例如城市热岛效应,沙尘暴等。为了解决这些问题,人们逐渐发现城市绿地对城市生态环境的改善有着不可替代的功效,为此,许多国家将城市绿化制定为城市可持续发展战略的一个重要内容,并将城市绿地作为衡量城市综合质量的重要指标之一。 利用遥感技术获取绿地信息成为快速、客观、准确的城市生态监测、评价、规划和管理的重要手段。目前可以利用的高分辨率遥感数据资料越来越多,高于lm 分辨率航天遥感影像和航空遥感影像己开始应用到资源调查和测图中。 2.城市绿地信息提取研究现状及存在问题 城市绿地是在人类较强干扰下生成的绿地景观,其生态效益不仅与绿地斑块的面积、空间分布有关,而且与构成绿地的植被类型密切相关(王伯荪,1987 )。90 年代后期,景观生态学理论和方法逐渐应用到对城市绿化的研究中,这些研究为城市植被研究提供了新的研究思路和方法(高峻等,2002 :李贞等,2000 )。城市植被遥感信息提取为城市植被景观生态分析提供基础数据,是遥感信息提取的重要研究方向,也是城市植被学研究的重要内容(王伯荪等,1998 )。 2.1 航空遥感影像用于植被信息提取 随着遥感技术的发展,航空影像图的信息提取比例尺已经达到了1:1000 ,由遥感图提取城市绿地率和绿化覆盖率,是一条比较成熟和现实的途径。2001 年5 月上海市已完成三次航空遥感城市绿地精细调查。2000 年山东省建设处委托中国国土资源航空物探遥感中心对山东省济南市、淄博、文登、荣成等地市进行了航空遥感城市绿化调查。大比例尺彩红外航空遥感图像具有信息量大、植物标志清楚等优点,它不仅被广泛用于植被调查,而且对植 1本课题得到国家863项目(2007AA12Z174)资助。
SPOT5遥感影像土地利用信息提取方法研究
第39卷 第6期2011年6月 西北农林科技大学学报(自然科学版) Jo ur nal of N o rthwest A&F U niver sity(N at.Sci.Ed.) Vo l.39N o.6 Jun.2011 SPOT5遥感影像土地利用信息提取方法研究 张伐伐a,李卫忠a,卢柳叶b,康 乐a (西北农林科技大学a林学院,b资源环境学院,陕西杨凌712100) [摘 要] 目的 探讨高分辨率遥感影像土地利用信息提取方法的优劣,为研究土地利用/覆盖动态变化提供参考。 方法 以结合纹理特征的支持向量机(Support vector machine,SV M)分类和多尺度分割的面向对象分类为主要技术,对陕西佛坪长角坝乡遥感影像的土地利用信息进行提取,并将分类结果与基于传统像元的最大似然法分类结果进行比较分析。 结果 面向对象分类法的总精度达到90.67%,较结合纹理特征的SV M法提高了8.34%,而与最大似然分类法相比提高了近20.32%,克服了其他分类方法存在的同谱异物现象及分类结果中地物破碎等缺点,取得了较好的分类结果。 结论 利用面向对象分类法不仅达到了提取土地利用信息的目的,而且精度高、速度快。 [关键词] 遥感影像;土地利用信息;支持向量机;纹理特征;多尺度分割;精度评价 [中图分类号] S127[文献标识码] A[文章编号] 1671 9387(2011)06 0143 05 Study on extraction methods of land utilization information based on SPOT5 ZHAN G Fa fa a,LI Wei zhong a,LU Liu ye b,KANG Le a (a College of F or estry,b Colleg e of Resourc es and Env ironment,N or th w est A&F Univ ersity,Yang ling,S haanx i712100,China) Abstract: Objective T he study explored the effect of ex tracting approach for info rmatio n o f land uti lization based on high resolution remo te sensing im ag e to provide evidence for studying land utilization and cov er dynam ic variatio n. M ethod T his paper ex tracted the info rmation o f land utilizatio n focused on Changjiaoba to w n,using SVM classification o f tex ture feature and object or iented classification o f multi resolution seg mentatio n.The classification result w as compared w ith m ax imum likelihood classification. Then the classification result w as analyzed. Result T he ov erall classification accuracy o f object o riented w as90.67%,w hich incr eased by8.34%compared w ith SVM classification of tex ture feature and increased by20.32%com pared w ith m ax imum likelihoo d classificatio n.T his kind of classification not o nly can g et o v er the disadvantages of other classificatio ns,e.g.Spectral Similar and Ground object Fragm entations,etc. but also acquire good effectiveness. Conclusion Using the classification of object oriented can realize the purpose o f ex tracting the land utilization information,and this m ethod is accurate and fast. Key words:rem ote sensing im ag e;inform ation o f land uatilization;support v ector m achine;tex tur e fea ture;multiresolution segm entation;accuracy assessment 土地利用信息的获取,是研究士地利用和土地覆盖动态变化的基础,将遥感、地理信息系统和全球定位系统相结合,开展国土资源和环境综合调查,具有现势性强、分类周期短、资源信息更新快等优势,从而可以以最快的速度动态监测土地资源利用及环境的变化情况,及时为社会经济发展决策和制定相关规 *[收稿日期] 2010 11 29 [基金项目] 国家林业局 948 项目(2009 4 45) [作者简介] 张伐伐(1985-),男,安徽怀远人,在读硕士,主要从事 3S 技术在资源与环境中的应用研究。 E mail:zhangfafa520@https://www.360docs.net/doc/ac8324482.html, [通信作者] 李卫忠(1963-),男,陕西蒲城人,副教授,硕士生导师,主要从事森林经理学研究。E m ail:w eizhong_li@https://www.360docs.net/doc/ac8324482.html,
遥感影像道路网自动提取的研究_李燕
收稿日期:2003-03-28作者简介:李燕(1977-),女,四川成都人,硕士研究生,主要从事遥感图像处理与应用、模式识别研究。 遥感影像道路网自动提取的研究 李 燕,余旭初 (解放军信息工程大学测绘学院,河南郑州 450052) Road Automatic Extraction from Remote Sensor Image LI Yan,YU Xu -chu 摘要:详细分析了道路的影像特征,建立了道路网描述模型。对道路模型的表达采用了模糊数学的方法,对知识的表达使用了带有置信度因子的模糊产生式规则,知识的推理使用了不确定性推理中的各种理论。本项研究力图模拟人的感知过程,以段的几何与灰度属性为主,并顾及局部上下文线索进行感知编组;基于道路模型对道路段进行识别;再利用道路的全局性约束知识对道路段进行重组,弥补了局部编组下的缺点。进行道路的分支和交叉的检测形成道路网。 关键词:影像理解;道路模型;感知编组;知识表达;知识推理;特征提取;几何结构信息中图分类号:P237 文献标识码:B 文章编号:1671-3044(2003)03-0011-05 1 引 言 近年来,遥感技术迅猛发展,而人们对遥感信息的认识和利用程度要远远落后于通过空间和航空系 统获取信息源的速度。从影像获取信息是人类获得知识的主要来源之一,如何自动处理、解译海量的图像数据是在整个社会信息化过程中面临的重要问题。从遥感图像中识别各种目标,是图像处理和目标识别的一个重要研究课题。道路自动识别是其中一个基本的、常见的问题。道路网是非常重要的基础地理信息,它的识别和精确定位对GIS 数据获取、影像理解、制图以及作为其他目标的参照体都有深远的意义。在过去的二十多年里,道路的提取在摄影测量界和计算机视觉界受到了广泛的重视,针对不同的影像类型,不同的影像分辨率,不同区域的影像和不同的道路类型,人们提出了许多从航空和遥感图像中自动提取道路的方法。但由于道路在遥感图像中的表现形式十分复杂,对不同比例尺的影像难以用固定的参数或特征描述,而只能用一些抽象的语句来描述。对于同一算法,不同的环境、不同的传感器、不同的图像、不同的成像条件等等会造成提取结果的极大差异,因而造成了自动识别的困难,使得自动提取道路信息成为一个难度很大的课题。目前仍然没有足够可靠和实用的自动识别软件。 本文以低分辨率影像乡村道路网的自动提取为对象,研究了以道路模型为基础,基于感知编组从遥感图像中自动提取道路网的方法。详细分析了道路的影像特征,建立了道路网描述模型。在道路识别过程中,对道路模型的表达采用了模糊数学的方法,对知识的表达使用了带有置信度因子的模糊产生式规则,知识的推理使用了不确定性推理中的各种理论。力图模拟人的感知过程,以段的几何与灰度属性为主,并顾及局部上下文线索进行感知编组,然后基于道路模型对道路段进行识别,再利用道路的全局性约束知识,如功能特征、拓扑特征、上下文特征等对道路段进行重组,弥补了局部编组下的缺点,最后进行道路的分支和交叉的检测形成道路网。2 道路描述模型 如何在实际图像中检测道路,关键问题是对现实世界中的道路进行正确的描述和理解,建立合适的道路模型。描述现实世界中的道路已经有很多学者做了研究,Garnesson 与Vosselman 等指出,道路的特征可以分为功能特征(functional)、几何特征(geometric)、辐射特征(photometric )、拓扑特征(topologic)、光谱特征和关联或上下文特征(contextual)等六个方面。本文重点研究低分辨率乡村主要道路的自动提取,我们抽象出道路的描述模 第23卷第3期2003年5月 海 洋 测 绘 H YDROGRAPHIC SURVEYING AND CHARTING V ol 123,No 13M ay ,2003
遥感卫星影像数据信息提取.
北京揽宇方圆信息技术有限公司 、 遥感卫星影像数据信息提取 北京揽宇方圆信息技术有限公司中科院企业,卫星影像数据服务全国领先。业务包括遥感数据获取与分发、遥感数据产品深加工与处理。按照遥感卫星数据一星多用、多星组网、多网协同的发展思路,根据观测任务的技术特征和用户需求特征,重点发展光学卫星影像、雷达卫星影像、历史卫星影像三个系列,构建由 26个星座及三类专题卫星组成的遥感卫星系统,逐步形成高、中、低空间分辨率合理配置、多种观测技术优化组合的综合高效全球观测和数据获取能力形成卫星遥感数据全球接收与全球服务能力。 (1光学卫星影像系列。 面向国土资源、环境保护、防灾减灾、水利、农业、林业、统计、地震、测绘、交通、住房城乡建设、卫生等行业以及市场应用对中、高空间分辨率遥感数据的需求,提供 worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、 ikonos、pleiades、spot1、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm、 landsat(etm、 rapideye、alos、Kompsat 卫星、北京二号、资源三 号、高分一号、高分二号等高分辨率光学观测星座。围绕行业及市场应用对基础地理信息、土地利用、植被覆盖、矿产开发、精细农业、城镇建设、交通运输、水利设施、生态建设、环境保护、水土保持、灾害评估以及热点区域应急等高精度、高重访观测业务需求,发展极轨高分辨率光学卫星星座,实现全球范围内精细化观测的数据获取能力。像国产的中分辨率光学观测星座。围绕资源调查、环境监测、防灾减灾、碳源碳汇调查、地质调查、水资源管理、农情监测等对大幅宽、快速覆盖和综合观测需求,建设高、低轨道合理配置的中分辨率光学卫星星座,实现全球范围天级快速动态观测以及全国范围小时级观测。
遥感矿物蚀变信息提取方法及ENVI下实现
遥感矿物蚀变信息提取方法及ENVI下实现
蚀变岩石是在热液作用影响下,使矿物成分、化学成分、结构、构造等发生变化的岩石。由于它们经常见于热液矿床的周围,因此被称为蚀变围岩,蚀变围岩是一种重要的找矿标志。利用围岩蚀变现象作为找矿标志已有数百年历史,发现的大型金属、非金属矿床更是不胜枚举:北美、俄罗斯的大部分斑岩铜矿、我国的铜官山铜矿、犹他州的大铝矿、西澳大利亚的大型金矿、墨西哥的大铂矿、美国许多白钨矿、世界大多数锡矿、哈萨克斯坦的刚玉矿等,都属于以围岩蚀变作为找矿标志发现的矿床。 国内外遥感工作者,都在不断地设计、研制和总结对这种遥感信息的提取和识别技术。矿化蚀变信息是找矿的一个重要标志,而这些对找矿有指导意义的矿化蚀变信息常常受其它地物信息的干扰,和受遥感图像的波谱分辨率和空间分辨率的制约,往往表现的很微弱。因此,国内外学者也在不断尝试各种技术方法提取这种矿化蚀变弱信息。 本文总结了遥感蚀变信息提取的各类方法,及其在ENVI软件中的实现。 ?原理 遥感技术主要是建立在物体反射和发射电磁波的原理之上。而地物波谱特性通常都是用地物反射辐射电磁波来描述。由于地物反射发射电磁波的特性不同,其反射波谱曲线形态也有千差万别。如植物的反射波谱曲线上,在绿光波段表现由于其叶绿素的存在表现为有一强反射峰,而在短波红外波段由于叶冠组织的相互作用表现为强反射峰,在红光波段则表现为强吸收谷。 遥感地质应用中,近矿围岩蚀变形成的蚀变岩石与其周围的正常岩石在矿物种类、结构、颜色等方面都有差异,这些差异导致了岩石反射光谱特征的差异,并且在某些特定的光谱波段形成了特定蚀变岩石的光谱异常。光谱异常为用遥感图像的异常信息提取提供了理论依据。 ?方法及实现 依据矿化蚀变岩与围岩的波谱特征的差异,可采用图像增强处理方法获取矿化蚀变信息增强的图像变量,从而最终实现提取矿化蚀变信息的目的。一般图像增强突出蚀变信息有以下几种方法。 (1)蚀变干扰信息剔除 遥感数据包含地表的信息,遥感在地质方面的应用就是提取用户需要的信息,提取矿化蚀变信息的过程是计算影像中所有像素信息统计归类分析的过程,蚀变异常信息的提取对遥感图像的质量要求较高,因此首先要对遥感数据进行严格的筛选,干扰噪声小的数据,一般要求遥感数据的时相是植被发育较弱、冰雪覆盖少的季节,同时该时相的云覆盖量较少。由于受地形地貌的影响,有些因素靠数据的时相选择却难以克服,例如阴影、河流水体、高山上的冰雪、白泥地等,可以采用相应的数学方法来解决,以使阴影、水体等干扰像素的数据不参与统计分析。一方面是选择较好的数据;另一方面是对数据进行数据预处理,包括大气校正、掩膜等。 利用ENVI软件的大气校正模块flassh能快速的消除大气影响,还原地物的真实面目。有利于蚀变信息的提取。
遥感信息提取资料
遥感图像信息提取方法综述 0、遥感图像分析 遥感实际上是通过接收(包括主动接收和被动接收方式)探测目标物电磁辐射信息的强弱来表征的,它可以转化为图像的形式以相片或数字图像表现。多波段影像是用多波段遥感器对同一目标(或地区)一次同步摄影或扫描获得的若干幅波段不同的影像。 在遥感影像处理分析过程中,可供利用的影像特征包括:光谱特征、空间特征、极化特征和时间特性。在影像要素中,除色调/彩色与物体的波谱特征有直接的关系外,其余大多与物体的空间特征有关。像元的色调/彩色或波谱特征是最基本的影像要素,如果物体之间或物体与背景之间没有色调/彩色上的差异的话,他们的鉴别就无从说起。其次的影像要素有大小、形状和纹理,它们是构成某种物体或现象的元色调/彩色在空间(即影像)上分布的产物。物体的大小与影像比例尺密切相关;物体影像的形状是物体固有的属性;而纹理则是一组影像中的色调/彩色变化重复出现的产物,一般会给人以影像粗糙或平滑的视觉印象,在区分不同物体和现象时起重要作用。第三级影像要素包括图形、高度和阴影三者,图形往往是一些人工和自然现象所特有的影像特征。 1、遥感信息提取方法分类 常用的遥感信息提取的方法有两大类:一是目视解译,二是计算机信息提取。 1.1目视解译 目视解译是指利用图像的影像特征(色调或色彩,即波谱特征)和空间特征(形状、大小、阴影、纹理、图形、位置和布局),与多种非
遥感信息资料(如地形图、各种专题图)组合,运用其相关规律,进行由此及彼、由表及里、去伪存真的综合分析和逻辑推理的思维过程。早期的目视解译多是纯人工在相片上解译,后来发展为人机交互方式,并应用一系列图像处理方法进行影像的增强,提高影像的视觉效果后在计算机屏幕上解译。 1)遥感影像目视解译原则 遥感影像目视解译的原则是先“宏观”后“微观”;先“整体”后“局部”;先“已知”后“未知”;先“易”后“难”等。一般判读顺序为,在中小比例尺像片上通常首先判读水系,确定水系的位置和流向,再根据水系确定分水岭的位置,区分流域范围,然后再判读大片农田的位置、居民点的分布和交通道路。在此基础上,再进行地质、地貌等专门要素的判读。 2)遥感影像目视解译方法 (1)总体观察 观察图像特征,分析图像对判读目的任务的可判读性和各判读目标间的内在联系。观察各种直接判读标志在图像上的反映,从而可以把图像分成大类别以及其他易于识别的地面特征。 (2)对比分析 对比分析包括多波段、多时域图像、多类型图像的对比分析和各判读标志的对比分析。多波段图像对比有利于识别在某一波段图像上灰度相近但在其它波段图像上灰度差别较大的物体;多时域图像对比分析主要用于物体的变化繁衍情况监测;而多各个类型图像对比分析则包括不同成像方式、不同光源成像、不同比例尺图像等之间的对比。
ERDAS-遥感专题信息提取与专题图制作
遥感专题信息提取与专题图制作设计报告 1、课程设计的目的与意义 本次课程设计的目的主要就是为了加深理解与巩固遥感原理与应用的有关理论知识;熟悉遥感图像处理的方法与步骤,学习运用ERDAS软件对遥感图像进行几何纠正、图像镶嵌、图像融合、自动分类以及专题图制作等处理。锻炼独立分析问题与解决问题的能力,培养良好的工作习惯与科学素养,为今后工作打下良好的基础。 2、课程设计的原理与方法 2、1课程设计原理 2、1、1 图像预处理 ERDAS软件默认的文件格式就是img格式,因此首先需要将实习数据由TIFF 格式转换为img格式图像。 多波段影像包含的信息量较大,实习中将6个单波段影像合成多波段影像进行处理。 Spot影像需具有地理信息,要将影像头文件信息添加进去。 2、1、2几何纠正 遥感所获取的数据,均存在几何畸变。因此需要对图像进行几何纠正。几何纠正的原理就是将图像数据投影到平面上,使其符合地图投影系统。而将地图投影系统赋予图像数据的过程,称为地理参考。由于所有地图投影系统都遵循一定的地图坐标系统,因此几何纠正的过程包含了地理参考过程。在实习过程中,采用了一次多项式法进行几何纠正。 2、1、3图像镶嵌 因研究范围的要求,需要在几何上将左右两幅图像连接在一起,并且保证拼接后的图像反差一致,色调相近,没有明显的接缝。遥感影像在镶嵌之前,必须包含投影信息、地理坐标信息,还要有相同的波段数。当然,在挑选遥感数据时,要尽可能选择成像时间与成像条件相近的遥感图像,要求相邻影像的色调一致。 2、1、4图像裁剪 在实际工作中,经常需要根据研究工作范围对图像进行裁剪,按照ERDAS实际图像分幅裁剪的过程,可以将图像分幅裁剪分为两种类型:规则分幅裁剪与不规则分幅裁剪。 规则分幅裁剪就是指裁剪图像的边界范围就是一个矩形,通过左上角与右下角两点的坐标,就可以确定图像的裁剪位置,整个裁剪过程比较简单。 不规则分幅裁剪就是指裁剪图像的边界范围就是任意多边形,无法通过左上角与右下角两点的坐标确定裁减位置,而必须事先生成一个完整的闭合多边形区域,可以就是一个AOI多边形,也可以就是ArcInfo的一个Polygon Coverage,针对不同的情况采用不同的裁剪过程。
遥感特征提取物具体步骤
1遥感影像通过亮度值或像元值的高低差异(反映地物的光谱信息)及空间变化(反映地物的空间信息)来表示不同地物的差异,这是区分不同影像地物的物理基础。目前影像都是基于数字,影像信息的提取方法的发展历程可分为如图1所示,目前这四类方法共存。 图1 影像信息提取发展阶段 非监督分类步骤监督分类步骤 2三大分类方法的对比 利用传统的遥感影像分类方法, 如监督分类或非监督分类, 易造成分类精度降低, 空间数据大量冗余以及资源的浪费,面向对象的分类方法正是为了处理这些问题而出现, 面向对象的分类方法是一种智能化的自 动影像分析方法,它的分析单元不再是单个像素,而是由若干个像素组成的像素群,即目标对象。面向对象的方法利用遥感影像结构信息和光谱信息, 并建立这些特征之间的层次关系的基础上, 对影像进行分类。面向对象分类方法的关键在于图像分割, 而图像分割方法多种多样, 如何选择科学合理的图像分割方法十分重要,实验证明多尺度图像分割方法综合了图像的光谱!形状!结构!纹理!相关布局等信息, 是目前较为理想的图像分割方法。(采用面向对象分类的方法,可使用专业遥感图像分类软件eCognition4.0) 3面向对象的分类方法
面向对象的技术流程图 3Envi_ENVI FX简介 全名叫“面向对象空间特征提取模块—Feature Extraction”,基于影像空间以及影像光谱特征,即面向对象,从高分辨率全色或者多光谱数据中提取信息,该模块可以提取各种特征地物如车辆、建筑、道路、桥、河流、湖泊以及田地等。该模块可以在操作过程中随时预览影像分割效果。该项技术对于高光谱数据有很好的处理效果,对全色数据一样适用。对于高分辨率全色数据,这种基于目标的提取方法能更好的提取各种具有特征类型的地物。一个目标物体是一个关于大小、光谱以及纹理(亮度、颜色等)的感兴趣区域。 应用于:1】从影像中尤其是大幅影像中查找和提取特征 2】添加新的矢量层到地理数据库 3】输出用于分析的分类影像 4】替代手工数字化过程 ENVI FX的操作可分为两个部分:发现对象(Find Object)和特征提取(Extract features),如图所示
遥感影像信息提取与分析_沈占锋
计算机世界/2006年/7月/31日/第B15版 技术专题 Taries软件主要应用于对高分辨率遥感影像的各种信息的处理、提取与分析,是具有自主知识产权的软件产品。 遥感影像信息提取与分析 沈占锋 近年来,一系列高分辨率卫星的相继上天,高分辨率卫星遥感的应用也因此成为可能,也凸现出遥感影像数据处理的重要性日益显现。遥感影像数据处理的主要内容就是对遥感数据(主要是高分辨率遥感影像数据)进行自动(半自动)图像处理分析,从而获取人们需要的信息。 Taries软件是具有自主知识产权的软件产品,由中科院遥感所国家遥感应用工程技术研究中心下属的空间信息关键技术研发部开发。Taries软件主要应用于对高分辨率遥感影像的各种信息的处理、提取与分析,其功能包括影像的预处理、影像分割、影像分类、特征提取与表达、特征分析、目标识别等。它是集矢量和栅格于一体化的软件系统。 Taries主要功能 1. 影像处理 (1)采用几何精纠正方法:建立基于空间投影理论与有限控制点的全局自适应方法,并建立基于控制点、线、面特征的局部自适应相结合的影像几何精纠正模型。 (2)实现多源遥感影像信息的特征级融合: 在像元级、高精度的多源遥感信息分析技术基础上,发展了各种特征估计器和融合评判规则,建立特征级的多源遥感信息融合的方法以及相应的算法。 2. 影像信息提取 (1)在复杂环境中的目标信息增强: 采用具有空间自适应能力的目标特征的信息增强模型与方法,特别是弱目标信息的增强方法,并对无关背景信息进行抑制。 (2)高分辨率影像分割: 基于空间特征(包括纹理特征、形状特征和动态特征)以及高维统计特征,采用面向特征的高分辨率影像分割技术(如基于模糊集理论、EM模型、Markov模型、MCMC模型、小波分析等)。 (3)基于智能计算模型的目标特征提取: 基于神经网络、支撑向量机等智能计算模型,研究和发展针对目标的纹理特征、结构特征的提取方法,并实现相应算法。 (4)目标识别与提取系统原型: 采用组件技术,研制开发目标识别与提取软件系统原型,包括影像精处理、目标单元分割与特征提取、目标识别等模块。 3. 矢量数据显示、处理与分析 (1)兼容ArcGIS SHP等矢量数据存储格式,能够采用系统的矢栅一体化数据模型对相应的矢量数据进行读取与显示。 (2)基于底层数据模型,能够实现基于Taries软件的矢量数据的修改功能,包括基本对象(点、线、面)的增、删、改等操作。 (3)基于相应的矢量数据建立拓扑关系,并在此基础上进行相应的空间分析功能(如最优路径查询分析等)。 (4)具有常规的矢量数据显示软件的基本功能,并可在此基础开发进一步的应用(如移动目标定位与车辆跟踪系统等)。 关键技术
遥感图像信息提取方法综述
遥感图像信息提取方法综述 遥感图像分析 遥感实际上是通过接收(包括主动接收和被动接收方式)探测目标物电磁辐射信息的强弱来表征的,它可以转化为图像的形式以相片或数字图像表现。多波段影像是用多波段遥感器对同一目标(或地区)一次同步摄影或扫描获得的若干幅波段不同的影像。 在遥感影像处理分析过程中,可供利用的影像特征包括:光谱特征、空间特征、极化特征和时间特性。在影像要素中,除色调/彩色与物体的波谱特征有直接的关系外,其余大多与物体的空间特征有关。像元的色调/彩色或波谱特征是最基本的影像要素,如果物体之间或物体与背景之间没有色调/彩色上的差异的话,他们的鉴别就无从说起。其次的影像要素有大小、形状和纹理,它们是构成某种物体或现象的元色调/彩色在空间(即影像)上分布的产物。物体的大小与影像比例尺密切相关;物体影像的形状是物体固有的属性;而纹理则是一组影像中的色调/彩色变化重复出现的产物,一般会给人以影像粗糙或平滑的视觉印象,在区分不同物体和现象时起重要作用。第三级影像要素包括图形、高度和阴影三者,图形往往是一些人工和自然现象所特有的影像特征。 1、遥感信息提取方法分类 常用的遥感信息提取的方法有两大类:一是目视解译,二是计算机信息提取。 1.1目视解译 目视解译是指利用图像的影像特征(色调或色彩,即波谱特征)和空间特征(形状、大小、阴影、纹理、图形、位置和布局),与多种非遥感信息资料(如地形图、各种专题图)组合,运用其相关规律,进行由此及彼、由表及里、去伪存真的综合分析和逻辑推理的思维过程。早期的目视解译多是纯人工在相片上解译,后来发展为人机交互方式,并应用一系列图像处理方法进行影像的增强,提高影像的视觉效果后在计算机屏幕上解译。 1)遥感影像目视解译原则 遥感影像目视解译的原则是先“宏观”后“微观”;先“整体”后“局部”;先“已知”后“未知”;先“易”后“难”等。一般判读顺序为,在中小比例尺像片上通常首先判读水系,确定水系的位置和流向,再根据水系确定分水岭的位置,区分流域范围,然后再判读大片农田的位置、居民点的分布和交通道路。在此基础上,再进行地质、地貌等专门要素的判读。 2)遥感影像目视解译方法 (1)总体观察 观察图像特征,分析图像对判读目的任务的可判读性和各判读目标间的内在联系。观察各种直接判读标志在图像上的反映,从而可以把图像分成大类别以及其他易于识别的地面特征。(2)对比分析 对比分析包括多波段、多时域图像、多类型图像的对比分析和各判读标志的对比分析。多波段图像对比有利于识别在某一波段图像上灰度相近但在其它波段图像上灰度差别较大的物体;多时域图像对比分析主要用于物体的变化繁衍情况监测;而多各个类型图像对比分析则包括不同成像方式、不同光源成像、不同比例尺图像等之间的对比。 各种直接判读标志之间的对比分析,可以识别标志相同(如色调、形状),而另一些标识不同(纹理、结构)的物体。对比分析可以增加不同物体在图像上的差别,以达到识别目的。(3)综合分析 综合分析主要应用间接判读标志、已有的判读资料、统计资料,对图像上表现得很不明显,或毫无表现的物体、现象进行判读。间接判读标志之间相互制约、相互依存。根据这一特点,可作更加深入细致的判读。如对已知判读为农作物的影像范围,按农作物与气候、地貌、土质的依赖关系,可以进一步区别出作物的种属;河口泥沙沉积的速度、数量与河流汇水区域
遥感提取特征点
遥感影像特征点提取
一、 基于Moravec 算子的特征点提取 1. Moravec 算子的原理及算法公式 该算子是通过逐像元量测与其邻元的灰度差,搜索相邻像元之间具有高反差的点,具体方法有以下几种。 (1)计算各像元的有利值,如图所示,在5×5的窗口内沿着图示四个方向分别计算相邻像元间灰度差之平方和V 1,V 2,V 3,及V 4,取其中最小值作为该像元的有利值: 其中: 式中, j i G ,代表像元j i P ,的灰度值,W 为以像元计的窗口大小,如图所示,n m W ,5,=为像元在整块影像中位置序号。 (2)给定一个阈值,确定待定点的有利点。如果有利值大于给定的阈值,则将该像元作为候选点。阈值一般为经验值。 (3)抑制局部非最大。在一定大小窗口内(例如5×5,7×7,,9×9像元等),将上一步所选的候选点与其周围的候选点比较,若该像元的有利非窗口中最大值,则去掉;否则,该像元被确定为特征点,这一步的目的在于避免纹理丰富的区域产生束点,用于抑制局部非最大的窗口大小取决于所需的有利点密度。 综上所述,Moravec 算子是在四个主要方向上选择具有最大—最小灰度方差的点作为特征点。 2. 基于MATLAB 的算法编程 clear all;close all;clc img=double(imread('1001.jpg')); [h w]=size(img); imshow(img,[]) imgn=zeros(h,w); n=4; for y=1+n:h-n for x=1+n:w-n sq=img(y-n:y+n,x-n:x+n); V=zeros(1,4); }V ,V ,V ,min{V 4321min =IV ∑+-=i j i j i G G V 21-,1,4)(∑++-=i j i j i G G V 21,1,3)(∑+-=i j i j i G G V 21,,2)(∑+-=i j i j i G G V 2,1,1)(;1,,-+-=k m k m i ;1,,-+-=k n k n j 。2/W k =
遥感专题信息提取及专题图制作设计报告
遥感原理与应用课程设计—“遥感专题信息提取与专题图制作”设计报告 学院遥感信息工程学院 班级 学号 姓名 日期2012年2月21日
一、课程设计的目的和意义 本次课程设计的目的主要是为了加深理解和巩固遥感原理与应用的有关理论知识;要求我们会运用专业遥感软件,通过对遥感影像进行各种处理以及专题信息提取等综合应用,培养独立分析问题和解决问题的能力。本次实习的意义在于锻炼我们的独立自主能力,培养良好的工作习惯和科学素养,为今后工作打下良好的基础。 二、课程设计方案和流程 1、实验数据介绍 地点:XX地区 传感器类型:TM1、3、4、5、6、7波段影像;空间分辨率:30米、120米; SPOT影像,分辨率10米。 说明文件:Readme.txt,SPOT影像投影信息、大地坐标、分辨率。 2、硬软件介绍 本次实习使用的软件主要为ERDAS软件。ERDAS IMAGINE是美国ERDAS 公司开发的专业遥感图像处理与地理信息系统软件。在图像处理方面,直观的操作步骤使用户操作起来非常灵活方便。IMAGINE的窗口提供了卷帘、闪烁、设置透明度以及根据坐标进行窗口关联功能,方便多个相关图像的比较。ERDAS IMAGINE 为不同的应用提供了250多种地图投影系统,还有非常方便的坐标转换工具。新开发的专家分类器,为高光谱、高分辨率图像的快速高精度分类提供了可能。此工具突破了传统分类只能利用光谱信息的局限,可以利用空间信息辅助分类。 3、总体方案 本次实习给定的是XX地区的相关波段的TM图,我想采用分类融合技术,利用各个波段的TM图像进行影像融合,分别提取该区域的水系、植被、居民地,以这三种地类的面积或周长等要素作为研究对象,进而制作出XX地区的土地利用专题图。 详细步骤如下: (1)、确定专题要素:XX地区水系、植被、居民地这三中地类的面积以及分布情况。 (2)、格式转换:先将源图像.tif格式的文件转换成.img格式的文件,便于软件进行处理。