中低速磁悬浮列车转向机构动力学分析
磁悬浮列车技术 论文
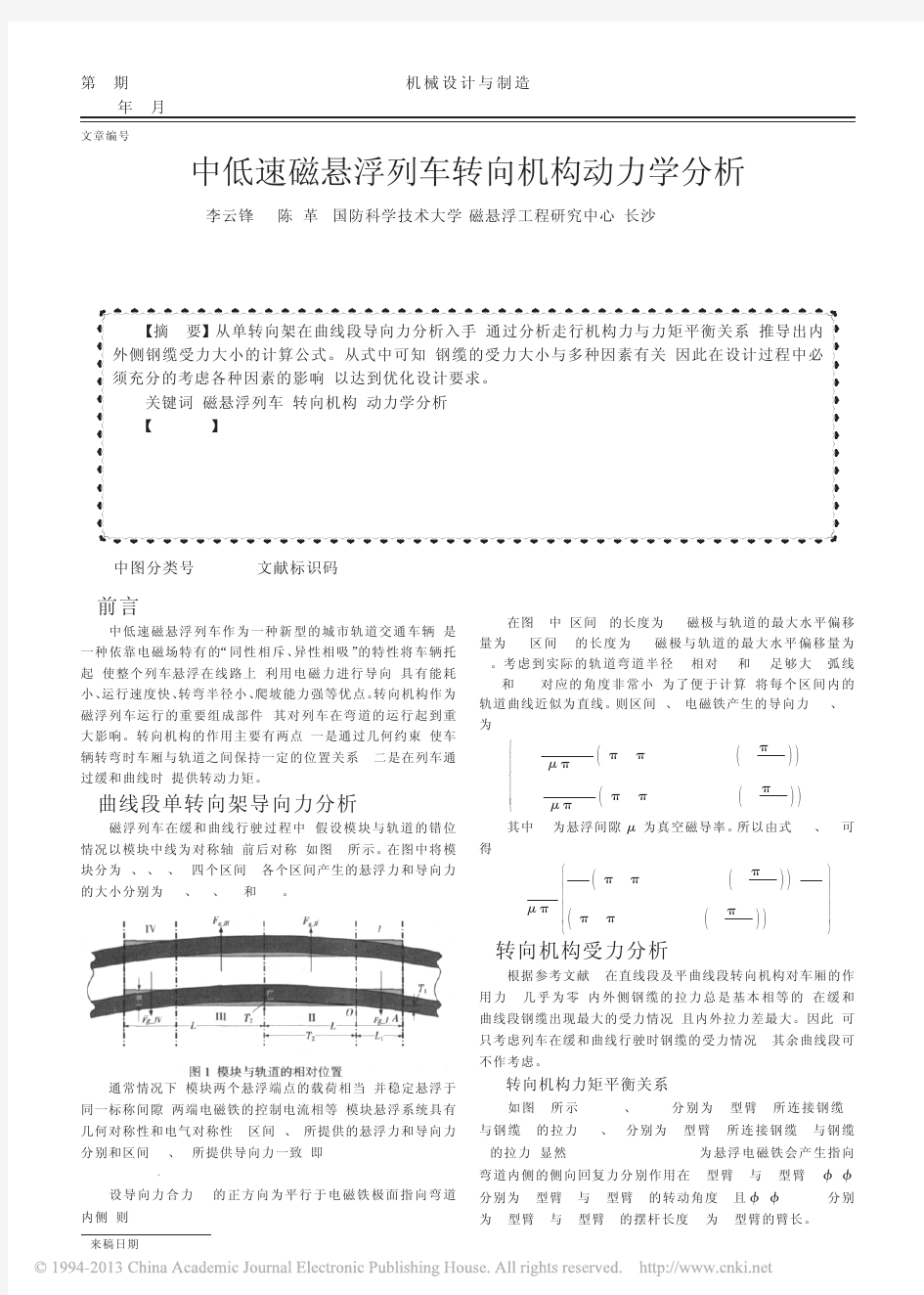
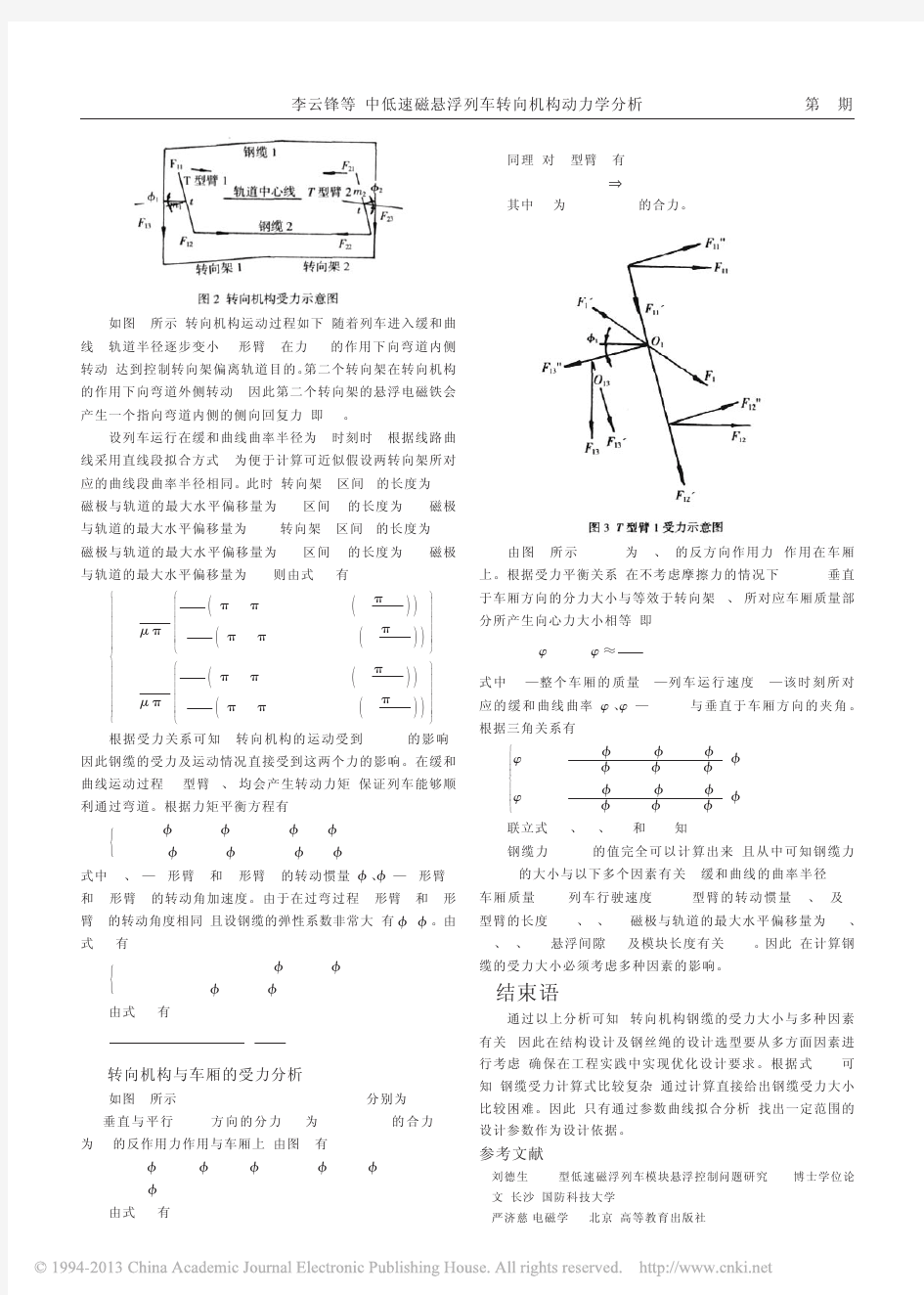
磁悬浮列车技术 苏州科技学院天平学院陈耀1330117102 【摘要】:磁悬浮列车是一种靠磁悬浮力(即磁的吸力和排斥力)来推动的列车。由于其轨道的磁力使之悬浮在空中,行走时不需接触地面,因此其阻力只有空气的阻力。磁悬浮技术的研究源于德国,早在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本等发达国家相继开始筹划进行磁悬浮运输系统的开发。磁悬浮列车是一种采用无接触的电磁悬浮、导向和驱动系统的磁悬浮高速列车系统。不同于传统列车利用车轮与钢轨之间的粘着力使列车前进。磁悬浮列车运行时与轨道保持10mm或者100mm的间隙,从根本上克服了传统列车轮轨黏着限制、机械噪声和磨损等问题,是一种新型的运载工具,其时速远远超过传动列车。 【关键词】:悬浮、推进、导向、创新 【正文】 一、工作原理 磁悬浮列车利用电磁体“同名磁极相互排斥,异名磁极相互吸引”的原理,让磁铁具有抗拒地心引力的能力,使车体完全脱离轨道,悬浮在距离轨道约1厘米处,腾空行驶,创造了近乎“零高度”空间飞行的奇迹磁悬浮列车主要由悬浮系统、推进系统和导向系统三大部分组成,尽管可以使用与磁力无关的推进系统,但在目前的绝大部分设计中,这三部分的功能均由磁力来完成。下面分别对这三分所采用的技术进行介绍。 导向系统
导向系统是一种测向力来保证悬浮的机车能够沿着导轨的方向运动。必要的推力与悬浮力相类似,也可以分为引力和斥力。在机车底板上的同一块电磁铁可以同时为导向系统和悬浮系统提供动力,也可以采用独立的导向系统电磁铁。悬浮系统 目前悬浮系统的设计,可以分为两个方向,分别是德国所采用的常导型和日本所采用的超导型。从悬浮技术上讲就是电磁悬浮系统(EMS)和电力悬浮系统(EDS)。图4给出了两种系统的结构差别。(EMS)是一种吸力悬浮系统,是结合在机车上的电磁铁和导轨上的铁磁轨道相互排斥产生悬浮。常导磁悬浮列车工作时,首先调整车辆下部的悬浮和导向电磁铁的电磁排斥力,与地面轨道两侧的绕组发生磁铁反作用将列车浮起。在车辆下部的导向电磁铁与轨道磁铁的反作用下,使车轮与轨道保持一定的侧向距离,实现轮轨在水平方向和垂直方向的无接触支撑和无接触导向。车辆与行车轨道之间的悬浮间隙为10毫米,是通过一套高精度电子调整系统得以保证的。此外由于悬浮和导向实际上与列车运行速度无关,所以即使在停车状态下列车仍然可以进入悬浮状态。(EDS)将磁铁使用在运动的机车上以在导轨上产生电流。由于机车和导轨的缝隙减少时电磁斥力会增大,从而产生的电磁斥力提供了稳定的机车的支撑和导向。然而机车必须安装类似车轮一样的装置对机车在“起飞”和“着陆”时进行有效支撑,这是因为EDS在机车速度低于大约25英里/小时无法保证悬浮。EDS系统在低温超导技术下得到了更大的发展。超导磁悬浮列车的最主要特征就是其超导元件在相当低的温度下所具有的完全导电性和完全抗磁性。超导磁铁是由超导材料制成的超导线圈构成,它不仅电流阻力为零,而且可以传导普通导线根本无法比拟的强大电流,这种特性使其能够制成体积小功率强大的电磁铁。
磁悬浮列车发展史
磁悬浮列车发展史 磁悬浮列车 2003-12-31 磁悬浮列车是自大约200年前斯蒂芬森的“火箭”号蒸气机车问世以来铁路技术最根本的突破。磁悬浮列车在今天看似乎还是一个新鲜事物,其实它的理论准备已有很长的历史。磁悬浮技术的研究源于德国,早在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。进入70年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。而美国和前苏联则分别在七八十年代放弃了这项研究计划,目前只有德国和日本仍在继续进行磁悬浮系统的研究,并均取得了令世人瞩目的进展。下面把各主要国家对磁浮铁路的研究情况作一简要介绍。 日本于1962年开始研究常导磁浮铁路。此后由于超导技术的迅速发展,从70年代初开始转而研究超导磁浮铁路。1972年首次成功地进行了2.2吨重的超导磁浮列车实验,其速度达到每小时50公里。1977年12月在宫崎磁浮铁路试验线上,最高速度达到了每小时204公里,到1979年12月又进一步提高到517公里。1982年11月,磁浮列车的载人试验获得成功。1995年,载人磁浮列车试验时的最高时速达到411公里。为了进行东京至大阪间修建磁浮铁路的可行性研究,于1990年又着手建设山梨磁悬浮铁路试验线,首期18.4公里长的试验线已于1996年全部建设完成。 德国对磁浮铁路的研究始于1968年(当时的联邦德国)。研究初期,常导和超导并重,到1977年,先后分别研制出常导电磁铁吸引式和超导电磁铁相斥式试验车辆,试验时的最高时速达到400公里。后来经过分析比较认为,超导磁浮铁路所需的技术水平太高,短期内难以取得较大进展,遂决定以后只集中力量发展常导磁浮铁路。1978年,决定在埃姆斯兰德修建全长31.5公里的试验线,并于1980年开工兴建,1982年开始进行不载人试验。列车的最高试验速度在1983年底达到每小时300公里,1984年又进一步增至400公里。目前,德国在常导磁浮铁路研究方面的技术已趋成熟。 与日本和德国相比,英国对磁浮铁路的研究起步较晚,从1973年才开始。但是,英国则是最早将磁浮铁路投入商业运营的国家之一。1984年4月,伯明翰机场至英特纳雄纳尔车站之间一条600米长的磁浮铁路正式通车营业。旅客乘坐磁浮列车从伯明翰机场到英特纳雄纳尔火车站仅需90秒钟。令人遗憾的是,在1995年,这趟一度是世界上唯一从事商业运营的磁浮列车在运行了
中国磁悬浮列车原理
磁悬浮列车 1.磁悬浮技术的原理 磁悬浮技术的系统,是由转子、传感器、控制器和执行器4部分组成,其中执行器包括电磁铁和功率放大器两部分。假设在参考位置上,转子受到一个向下的扰动,就会偏离其参考位置,这时传感器检测出转子偏离参考点的位移,作为控制器的微处理器将检测的位移变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力,从而驱动转子返回到原来平衡位置。因此,不论转子受到向下或向上的扰动,转子始终能处于稳定的平衡状态。 2.磁悬浮技术的应用 国际上对磁悬浮轴承的研究工作也非常活跃。1988年召开了第一届国际磁悬浮轴承会议,此后每两年召开一次。1991年,美国航空航天管理局还召开了第一次磁悬浮技术在航天中应用的讨论会。现在,美国、法国、瑞士、日本和中国都在大力支持开展磁悬浮轴承的研究工作。国际上的这些努力,推动了磁悬浮轴承在工业上的广泛应用。 国内对磁悬浮轴承的研究工作起步较晚,尚处于实验室阶段,落后外国约20年。1986年,广州机床研究所与哈尔滨工业大学首先对“磁力轴承的开发及其在FMS中的应用”这一课题进行了研究。此后,清华大学、西安交通大学、天津大学、山东科技大学、南京航空航天大学等都在进行这方面的研究工作。 目前在工业上得到广泛应用的基本上都是传统的磁悬浮轴承(需要位置传感器的磁悬浮轴承),这种轴承需要5个或10个非接触式位置传感器来检测转子的位移。由于传感器的存在,使磁悬浮轴承系统的轴向尺寸变大、系统的动态性能降低,而且成本高、可靠性低。此外,由于传感器的价格较高,从而导致磁悬浮轴承的售价很高,大大限制了它在工业上的推广应用。 2009年8月,参观者在北京看磁悬浮列车轨道,北京城建设计研究总院的总工杨秀仁透露,北京正在做一条磁悬浮线的长期规划———通往门头沟的S1轨道线路正在筹划,计划采用中国自主研发的磁悬浮技术。而由北京控股磁悬浮技术发展有限公司和国防科技大学合作的中低速磁浮列车,是中国唯一具有完全自主知识产权的磁悬浮列车。 3.磁悬浮技术的前景 随着电子元件的集成化以及控制理论和转子动力学的发展,经过多年的研究工作,国内外对该项技术的研究都取得了很大的进展。但是不论是在理论还是在产品化的过程中,该项技术都存在很多的难题,其中磁悬浮列车的技术难题是悬浮与推进以及一套复杂的控制系统,它的实现需要运用电子技术、电磁器件、直线电机、机械结构、计算机、材料以及系统分析等方面的高技术成果。需要攻关的是组成系统的技术和实现工程化。 磁悬浮轴承面向电力工程的应用也具有广阔的前景,根据磁悬浮轴承的原理,研制大功率的磁悬浮轴承和飞轮储能系统以减少调峰时机组启停次数;进行以磁悬浮轴
14_奇瑞_崔英杰_利用AVL EXCITE Timing Drive进行配气机构动力学分析
利用AVL EXCITE Timing Drive进行配气机构动力学分析 崔英杰刘波张璐 (奇瑞发动机工程研究二院试验与分析部,安徽芜湖, 241009)摘要:利用A VL Timing Drive建立某机型配气机构的单阀系模型,评价凸轮型线和配气机构各零件的动力学表现。首先分析凸轮型线运动学,然后判断该配气机构是否会出现气门飞脱、反跳、弹簧并圈、液力挺柱失效、凸轮磨损等现象,评价气门动力学特性及本组型线的可行性。 关键词:发动机;配气机构;运动学;动力学 主要软件:A VL EXCITE Timing Drive 1. 前言 本文通过A VL EXCITE Timing Drive建立配气机构的单阀系仿真模型,继而对一组凸轮型线进行动力学分析,考察是否会出现气门飞脱、反跳、弹簧并圈、液力挺柱失效、凸轮磨损等现象,评价气门动力学特性及本组型线的可行性。 2.模型搭建 2.1 配气机构布置图 该机型采用双顶置凸轮轴,配气机构主要由凸轮、液力挺柱、指型摇臂、气门及气门弹簧等零件组成,摇臂几何尺寸由机构布置如图1确定。 图1 配气机构布置图 2.2 零件质量、刚度、阻尼参数值确定 各零件质量、转动惯量均从Pro/E三维数模中分析所得。 指型摇臂、气门杆、气门阀面的刚度按照培训教材推荐采用有限元方法计算,弹簧的刚度则由弹簧测力曲线用曲线拟合方法得到变刚度值。
零件相互之间相对阻尼,都采用培训教材中所推荐的值。 2.3 其他参数 缸内压力曲线、排气道压力曲线由BOOST提供,如图2、3。 图2 缸内压力曲线图3 排气道压力曲线 2.3 EXCITE Timing Drive模型建立 采用以上数据,建立A VL EXCITE Timing Drive单阀系分析模型,如图4。 图4 TYCON分析模型 3.计算结果分析 3.1 型线运动学分析 以该发动机超速转速,分析这组凸轮型线。图5、6分别为进、排气气门的升程、速度、加速度曲线。 图5 进气运动学分析图6 排气运动学分析
四连杆机构分析代码动力学--精简
平面连杆机构的运动分析和动力分析1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) ≤其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm 最短杆长度+最长杆长度(125.36+50.1) ≤其余两杆长度之和(109.8+72.85) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第三组(3代)四杆机构L1=163.2mm,L2=61.6mm,L3=150mm,L4=90mm 最短杆长度+最长杆长度(163.2+61.6) ≤其余两杆长度之和(150+90) 最短杆为连架杆,四杆机构为曲柄摇杆机构 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 图1机构结构简图 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别为L1 、L2 、L3 、L4 , 其方位角为、、、。以各杆矢量组成一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即:
磁悬浮列车主要由悬浮系统
磁悬浮列车主要由悬浮系统、推进系统和导向系统三大部分组成,见图3。尽管可以使用与磁力无关的推进系统,但在目前的绝大部分设计中,这三部分的功能均由磁力来完成。下面分别对这三部分所采用的技术进行介绍。 悬浮系统:目前悬浮系统的设计,可以分为两个方向,分别是德国所采用的常导型和日本所采用的超导型。从悬浮技术上讲就是电磁悬浮系统(EMS)和电力悬浮系统(EDS)。图4给出了两种系统的结构差别。 电磁悬浮系统(EMS)是一种吸力悬浮系统,是结合在机车上的电磁铁和导轨上的铁磁轨道相互吸引产生悬浮。常导磁悬浮列车工作时,首先调整车辆下部的悬浮和导向电磁铁的电磁吸力,与地面轨道两侧的绕组发生磁铁反作用将列车浮起。在车辆下部的导向电磁铁与轨道磁铁的反作用下,使车轮与轨道保持一定的侧向距离,实现轮轨在水平方向和垂直方向的无接触支撑和无接触导向。车辆与行车轨道之间的悬浮间隙为10毫米,是通过一套高精度电子调整系统得以保证的。此外由于悬浮和导向实际上与列车运行速度无关,所以即使在停车状态下列车仍然可以进入悬浮状态。 电力悬浮系统(EDS)将磁铁使用在运动的机车上以在导轨上产生电流。由于机车和导轨的缝隙减少时电磁斥力会增大,从而产生的电磁斥力提供了稳定的机车的支撑和导向。然而机车必须安装类似车轮一样的装置对机车在“起飞”和“着陆”时进行有效支撑,这是因为EDS在机车速度低于大约25英里/小时无法保证悬浮。EDS系统在低温超导技术下得到了更大的发展。 超导磁悬浮列车的最主要特征就是其超导元件在相当低的温度下所具有的完全导电性和完全抗磁性。超导磁铁是由超导材料制成的超导线圈构成,它不仅电流阻力为零,而且可以传导普通导线根本无法比拟的强大电流,这种特性使其能够制成体积小功率强大的电磁铁。
磁悬浮技术原理
磁悬浮技术原理 磁悬浮技术原理 空间电磁悬浮技术简介随着航天事业的发展,模拟微重力环境下的空间悬浮技术已成为进行相关高科技研究的重要手段。目前的悬浮技术主要包括电磁悬浮、光悬浮、声悬浮、气流悬浮、静电悬浮、粒子束悬浮等,其中电磁悬浮技术比较成熟。电磁悬浮技术(electromagnetic levitation )简称EML技术。它的主要原理是利用高频电磁场在金属表面产生的涡流来实现对金属球的悬浮。 目录 起源 概述 空间电磁悬浮技术 发展历史 国际 中国 中国磁悬浮技术 原理 应用 前景 磁悬浮列车 磁悬浮列车的优点 磁悬浮列车的缺点 起源 概述 空间电磁悬浮技术 发展历史 国际 中国 中国磁悬浮技术 原理 应用 前景 磁悬浮列车 磁悬浮列车的优点 磁悬浮列车的缺点
展开 编辑本段起源 磁悬浮技术的研究源于德国,早在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。 编辑本段概述 利用磁力使物体处于无接触悬浮状态的设想是人类一个古老的梦。但实现起来并不容易。因为磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术(高新技术)。随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。 磁悬浮列车原理示意图 . 目前(2009年)国内外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国内外学者和企业界人士都对其倾注了极大的兴趣和研究热情。编辑本段空间电磁悬浮技术 随着航天事业的发展,模拟微重力环境下的空间悬浮技术已成为进行相关高科技研究的重要手段。目前的悬浮技术主要包括电磁悬浮、光悬浮、声悬浮、气流悬浮、静电悬浮、粒子束悬浮等,其中电磁悬浮技术比较成熟。 电磁悬浮技术(electromagnetic levitation )简称EML技术。它的主要原理是利用高频电磁场在金属表面产生的涡流来实现对金属球的悬浮。 磁悬浮列车工作示意图 将一个金属样品放置在通有高频电流的线圈上时,高频电磁场会在金属材料表面产生一高频涡流,这一高频涡流与外磁场相互作用,使金属样品受到一个洛沦兹力的作用。在合适的空间配制下,可使洛沦兹力的方向与重力方向相反,通过改变高频源的功率使电磁力与重力相
磁悬浮列车原理
第九篇磁悬浮列车原理 §9.1磁悬浮列车综述 你一定听说过磁悬浮列车吧,最近它的上镜率可是居高不下,大家都在密切地关注着它的发展态势。我们一直都在盼望着火车的提速,可经过几轮的努力,却总是达不到心中理想的标准,如果你家住在西安,距北京1000多公里,原先回家要17个小时,现在要14个小时,唉,只减少了区区3个小时,还要有难熬的一宿呀!可是你知道吗?普通磁悬浮列车的时速就可以达到500公里/小时,那么,回家就只需要不到3个小时,跟飞机差不多了! 其实,在本世纪五、六十年代,铁路曾经被认为是一个夕阳运输产业。因为面对航空、高速公路等运输对手的强劲挑战,它蜗牛般的爬行速度,已越来越不适应现代工业社会物流和人流的快速流动需要了。但七十年代以来,特别是近几年,随着铁路高速化成为世界的热点和重点,铁路重新赢回了它在各国交通运输格局中举足轻重的地位。法国、日本、俄国、美国等国家列车时速由200公里向300公里飞速发展。据1995年举行的国际铁路会议预测,到本世纪末,德国、日本、法国等国家的高速铁路运营时速将达到360公里。 但要使列车在如此高的速度下持续行驶,传统的车轮加钢轨组成的系统,已经无能为力了。这是因为传统的轮轨粘着式铁路,是利用车轮与钢轨之间的粘着力使列车前进的。它的粘着系数随列车速度的增加而减小,走行阻力却随列车速度的增加而增加,当车速增至粘着系数曲线和走行阻力曲线的交点时,就达到了极限。据科研人员推算,普通轮轨列车最大时速为350-400公里左右。如果考虑到噪音、震动、车轮和钢轨磨损等因素,实际速度不可能达到最大时速。所以,欧洲、日本现在正运行的高速列车,在速度上已没有多大潜力。要进一步提高速度,必须转向新的技术,这就是超常规的列车--磁悬浮列车。 尽管我们还将磁悬浮列车的轨道称为"铁路",但这两个字已经不够贴切了。
内燃机配气机构系统动力学分析_张晓蓉
第31卷第3期重庆大学学报 Vo.l 31 No .3 2008年3月 Jour nal of Chongqi n g U niversity M ar .2008 文章编号:1000-582X (2008)03-0294-05 内燃机配气机构系统动力学分析 张晓蓉1,2 ,朱才朝2 ,吴佳芸 2 (1.重庆科技学院机械学院,重庆400042;2.重庆大学机械传动国家重点实验室,重庆400030) 摘 要:内燃机配气机构直接影响着内燃机的性能和可靠性。论文对顶置四气门配气机构工作过程进行了分析,采用理论计算和实验方法确定了配气机构动力学模型的主要参数,利用AVL / TYCON 分析软件建立了顶置配气机构凸轮轴)摇臂)气门系统的一维动力学分析模型,并对其动态特性进行了数值仿真,验证了动力学模型及分析结果的正确性,为配气机构动态性能的评价和优化提出了理论依据。 关键词:内燃机;配气机构;动力学 中图分类号:TH 132.47 文献标志码:A System Dynam ic Analysis of Engine Valve -train ZHANG X i a o-ro ng 1,2 ,ZHU C a i -cha o 2 ,W U J i a -yun 2 (1.C ollege o fM echan ical Eng i n eeri n g ,Chongqi n g U niversity o f Science and Techno l o gy ,Chongqing 400042,P .R .China ; 2.State K ey Laboratory o fM echan ica lTrans m issi o n ,Chongqing University ,Chongq i n g 400030,P .R.Ch i n a)Abst ract :Va l v e tra i n is the key factor for the perfor m ance and reliab ility of eng ine .W e analyze the w or k i n g m echanis m of over head va l v e train w ith four valves ,and obtained the m a i n para m eters o f dyna m ic m odeli n g w ith t h eore tica l and experi m ental m ethods .On the basis of the above stud i e s ,w e buil d the m odel o f ca m shaf-t rocke-t valve syste m w ith AVL /TYCON soft w are .Its dyna m ic characteristics is si m ulated and ver ified by experi m ents .Th is paper prov ides a theoretical approach for the evaluati o n and opti m izati o n of dyna m ic perfor m ance of valve tra i n .K ey w ords :eng i n e ;va lve -train ;dyna m ics 配气机构是内燃机的重要组成部分,其设计优良与否直接影响内燃机的性能指标。这些指标不仅包括动力性、经济性,也包括运转性能如内燃机的振动、噪声、排放指标和可靠性等,因而开展配气机构系统动力学研究具有重要意义。 配气凸轮机构一直是内燃机研究的重要组成部分,研究内容已从最初单纯的凸轮经验设计,拓展到整个配气机构的运动学与动力学的综合研究。国外自20世纪初就有许多学者开始进行这方面的深入 研究;相比而言,国内则起步较迟,20世纪70年代起才开始全面研究凸轮设计与动力学分析,研究的重点放在凸轮型线设计、多质量动力学研究方面 [1-3] 。目前,国际上已有各种配气凸轮设计软件, 国内也出现了一些类似的软件,这些软件在速度与计算精度上都有所提高。文中以顶置四气门配气机构为例,通过理论计算和利用实验方法确定了配气机构动力学模型的主要参数,利用TYCON 分析软件建立了该配气机构的凸轮轴)摇臂)气门系统动力
动力学分析方法
1 动力学分析方法 结构动力学的研究方法可分为分析方法(结构动力分析)和试验方法(结构动力试验)两大类。[7-10] 分析方法的主要任务是建模(modeling),建模的过程是对问题的去粗取精、去伪存真的过程。在结构动力学中,着重研究力学模型(物理模型)和数学模型。建模方法很多,一般可分为正问题建模方法和反问题建模方法。正问题建模方法所建立的模型称为分析模型(或机理模型)。因为在正问题中,对所研究的结构(系统)有足够的了解,这种系统成为白箱系统。我们可以把一个实际系统分为若干个元素或元件(element),对每个元素或元件直接应用力学原理建立方程(如平衡方程、本构方程、汉密尔顿原理等),再考虑几何约束条件综合建立系统的数学模型。如果所取的元素是一无限小的单元,则建立的是连续模型;如果是有限的单元或元件,则建立的是离散模型。这是传统的建模方法,也称为理论建模方法。反问题建模方法适用于对系统了解(称黑箱系统——black box system)或不完全了解(称灰箱系统——grey box system)的情况,它必须对系统进行动力学实验,利用系统的输入(载荷)和输出(响应——response)数据,然后根据一定的准则建立系统的数学模型,这种方法称为试验建模方法,所建立的模型称为统计模型。 在动力平衡方程中,为了方便起见一般将惯性力一项隔离出来,单独列出,因此通常表达式为: +P M (2) u I - = 其中M为质量矩阵,通常是一个不随时间改变的产量;I和P是与位移和速度有关的向量,而与对时间的更高阶导数无关。因此系统是一个关于时间二级导数的平衡系统,而阻尼和耗能的影响将在I和P中体现。可以定义: + = (3) I Ku C u 如果其中的刚度矩阵K和阻尼矩阵C为常数,系统的求解将是一个线性的问题;否则将需要求解非线性系统。可见线性动力问题的前提是假设I是与节点位移和速度是线性相关的。 将公式(2)代入(1)中,则有 (4) + M= + u P Ku C u
磁悬浮列车运行原理
磁悬浮列车运行原理 磁悬浮列车是现代高科技发展的产物。其原理是利用电磁力抵消地球引力,通过直线电机进行牵引,使列车悬浮在轨道上运行(悬浮间隙约1厘米)。其研究和制造涉及自动控制、电力电子技术、直线推进技术、机械设计制造、故障监测与诊断等众多学科,技术十分复杂,是一个国家科技实力和工业水平的重要标志。它与普通轮轨列车相比,具有低噪音、无污染、安全舒适和高速高效的特点,有着“零高度飞行器”的美誉,是一种具有广阔前景的新型交通工具,特别适合城市轨道交通。磁悬浮列车按悬浮方式不同一般分为推斥型和吸力型两种,按运行速度又有高速和中低速之分,这次国防科大研制开发的磁悬浮列车属于中低速常导吸力型磁悬浮列车。 磁悬浮列车的种类 磁悬浮列车分为常导型和超导型两大类。常导型也称常导磁吸型,以德国高速常导磁浮列车transrapid为代表,它是利用普通直流电磁铁电磁吸力的原理将列车悬起,悬浮的气隙较小,一般为10毫米左右。常导型高速磁悬浮列车的速度可达每小时400~500公里,适合于城市间的长距离快速运输。而超导型磁悬浮列车也称超导磁斥型,以日本MAGLEV为代表。它是利用超导磁体产生的强磁场,列车运行时与布置在地面上的线圈相互作用,产生电动斥力将列车悬起,悬浮气隙较大,一般为100毫米左右,速度可达每小时500公里以上。这两种磁悬浮列车各有优缺点和不同的经济技术指标,德国青睐前者,集中精力研制常导高速磁悬浮技术;而日本则看好后者,全力投入高速超导磁悬浮技术之中。 德国和日本是世界上最早开展磁悬浮列车研究的国家,德国开发的磁悬浮列车Transrapid于1989年在埃姆斯兰试验线上达到每小时436公里的速度。日本开发的磁悬浮列车MAGLEV (Magnetically Levitated Trains)于1997年12月在山梨县的试验线上创造出每小时550公里的世界最高纪录。德国和日本两国在经过长期反复的论证之后,均认为有可能于下个世纪中叶以前使磁悬浮列车在本国投入运营。
发动机配气机构系统的动力学建模及仿真分析
发动机配气机构系统的动力学建模及仿真分析 罗卫平,陈曼华,姜小菁,王 (金陵科技学院机电工程学院,江苏南京211169) 摘要:针对发动机配气机构系统,在ADAM S/Engine软件中建立了其虚拟模型,在此基础上,对该机构进行了仿真分析,得到了气门的升程、速度、加速度和摇臂与挺柱的接触力等特性曲线,为配气机构动态性能的评价和优化提出了理论依据,从而为虚拟样机技术在新产品开发中的应用提供了有效方法。 关键词:配气机构;ADAM S/Engine;虚拟样机;多体动力学 中图分类号:U463.33;TP391.9文献标识码:A文章编号:1672-1616(2012)01-0051-04 配气机构的功用是根据发动机每一汽缸内进 行的工作循环顺序,定时地开启和关闭各汽缸的 进、排气门,以保证新鲜可燃混合气或空气得以及 时进入汽缸,并把燃烧后生成的废气及时排出汽 缸。配气机构的传统开发方法往往是多方案的比 较和试凑过程,这种基于物理样机的频繁的试验, 会延长研发周期和增加开发成本。虚拟样机技术 就是在这种情况下产生的一种数字化的研发模式, 即工程师在计算机上建立样机模型,对模型进行各 种动态性能的分析,然后改进样机设计方案,最后 投入生产。本文就是在这样的背景下,以多体动力 学为理论基础,采用美国MDI公司开发的 ADAM S软件。对发动机配气机构进行建模与仿 真,预测实际产品的特性,提供一个全面地研究产 品工作性能的方法。 1多体系统动力学研究的理论基础 随着多体动力学的发展,目前应用于多刚体系 统动力学的方法主要有以下几种:牛顿-欧拉法、 拉格朗日方法论、图论4法、凯恩法、变分法、旋量 法等。ADAMS用刚体i的质心迪卡儿坐标和反 映刚体方位的欧拉角作为广义坐标,即:q i=[x, y,z,W,H,<]T i,q=[q T1,,,q T n]T。采用拉格朗日 乘子法建立系统运动方程[1]: d d t 5T 5q# T - 5T 5q T +f T q Q+g T q#L=Q(1) 式中:T为系统动能;q为系统广义坐标列阵;Q 为广义力列阵;Q为对应于完整约束的拉氏乘子列阵,完整约束方程时,f(q,t)=0;L为对应于非完整约束的拉氏乘子列阵,非完整约束方程时,g(q, q#,t)=0。 2配气机构的动力学建模 配气机构是由凸轮轴、摇臂、气门、气门弹簧、挺柱、气门座等多个构件组成的机械系统,它是由凸轮的旋转带动驱动气门按预定的运动规律开启和关闭来实现配气的过程。ADAM S/Engine提供了多种配气机构部件模型的模板,因此在建立配气机构的模型时只需在ADAMS/Engine软件中选取 正确的模板,然后根据实际部件的特征,修改部件几何参数。如果模型库中不包含要建立的几何部件类型,则可以根据需要建立新的模板,然后导入标准界面进行分析[2]。本文利用ADAM S/Eng ine 模板建立了某柴油发动机顶置凸轮轴式配气机构的多刚体虚拟样机模型,如图1所示。 1)凸轮轴;2)摇臂;3)挺柱;4)气门弹簧; 5)气门;6)气门座 图1配气机构的虚拟样机模型 收稿日期:2011-08-10 作者简介:罗卫平(1973-),女,江苏南京人,金陵科技学院讲师,硕士,主要研究方向为虚拟技术和动力学仿真。
配气机构的多体系统动力学分析英文
Article ID:100420579(2000)0420375205 Multibody System Dynamics Analysis for V alve T rains Q IN Wen2jie, ZUO Zheng2xing (School of Vehicle and Trans portation Engineering,Beijing Institute of Technology,Beijing100081) Abstract:The theory of multibody system dynamics is used to simulate valve trains’kinematics and dynamics characteristics,and the methods of establishing and analyzing the multibody sys2 tem dynamics model for valve trains are discussed.Since most of the flexible bodies of a valve train are slender parts,the finite segment method is used to build their models.Other parts such as cams,valve heads etc.,are built as rigid bodies.After applying the constraints,forces and motions,the establishing of the whole system is accomplished,and the Lagrange’s multiplier method can be used to obtain its dynamics constitutive equations.As an example,a valve trainπs multibody system model of4100QB engine made by the Yunnan Internal Combustion Engine Limited2Liability Company is established,and the analysis results obtained show that its work2 ing performance is generally good except that the air2pass ability and the lubrication effect of the cam and the tappet have to be improved. K ey w ords:valve train;multibody system;dynamics C LC number:T K4 Document code:A Valve trains are broadly used to control the induction and exhaust of four2stroke engines. They are usually designed as rigid systems,in which valves’movements are completely controlled by the cam’s profiles.In fact,a valve train is an elastic system and the valve’s motion will devi2 ate from the theoretical result derived from the kinematics analysis due to the effect of the inertia and the elastic vibration.Thus the separation in the mechanism will occur and this will make its working conditions worse[1].With the improvement of engine’s speed,these dynamics problems become more and more significant.Therefore,the valve train’s dynamics characteristics must be checked. Usually a valve train is considered as a single2mass or multi2mass vibration system in the dy2 namic analysis[2].But this method cannot reflect the parts’movement and deformation directly, and the model’s parameters must be derived from experiments or other analysis.This will in2 crease the difficulties of model establishment and influence the calculation’s explicitness.Multi2 body system dynamics is a new science which studies the mechanics properties of the system com2 posed of flexible bodies and rigid bodies during the large span spatial movements.According to such a structure2mechanism system as a valve train,using it can not only simulate the motions and R eceived d ate:2000206212 Biography:QIN Wen2jie(1968-),female,lecturer,master.
配气机构的动力学分析
配气机构动力学分析课程设计 目录 一、配气机构的机构简图 ..................................... 错误!未定义书签。 二、配气机构运动学计算分析 (1) 1)配气机构中间参数法的代数分析 (1) 2)运初始值的设定及简化计算 (3) 三、配气机构动力学计算分析 (8) 1)受力分析及微分方程的建立 (8) 2)配气机构质量的换算及方程参数的计算 (10) 3)动力学微分方程的求解 (12) 四、配气机构动力学优化比较 (16) 参考文献: (23) 附件: (24)
配气机构的运动学和动力学分析 一、配气机构的机构简图 其自由度为5432352621F n p p =--=?-?-= 主动件为凸轮轴,输出件为气门。 二、配气机构的运动学计算分析 1、配气机构中间参数法的代数分析 由上面的机构简图可以得到,摇臂轴与凸轮轴的竖直位移为: 000c o s c o s c o s c o s T T T T y l l h l l h H αγαγ++=++= 化简得到: 000(cos cos )(cos cos )T T T l l h h ααγγ-+-=- (1) 摇臂轴与凸轮轴的水平位移: 00sin sin sin sin T T x l l l l H αγαγ+=+= 化简得到: 00(sin sin )(sin sin )0T l l ααγγ-+-= (2) 上面(1)(2)两式对时间求导得到
sin sin cos cos 0 T T T T dh dh l l dt d l l α γα γωαωγω?ωαωγ? +==??? ?--=? 解得cos sin() T T h l αωγ ωαγ'= - c o s s i n ()T h l γωαωαγ'=-- 其中αω,γω分别为摇臂和推杆的角速度,两式对时间求导得到摇臂和推杆的角加速度为: 22 22 (cos sin )sin()cos()()cos [sin()]cos sin []sin() cos sin()sin() [sin()]cos cos cos()[]sin()sin() T T T T T T T T T T T T T T T T h h l l h l h h l h l l l h h l l l γαγαωγωγωαγαγωωωγ εαγωα ωγαγωγαγαγαγωγωα αγαγαγ''''-?----= -''- -''-=---''-+--- 222223cos [sin()]cos cos cos()cos ()sin()sin () T T T T T T h l h h l l ωγ αγωγωγαγλααγαγ'-'''-+=--- 同理,得到推杆的角加速度为 22223 cos cos cos cos()()sin()sin () T T T h h l l γωαωγλααγελαγαγ'''+-=-+-- 其中T l l λ= 即为挺柱和推杆长度比 根据机构简图上的几何关系,00ββαα-=- 0(cos cos )V V l h ββ-=对时间求导可以得到 sin sin V V V dh l l dt βαβωβω=?=? 22 2 (cos sin )V V d h l dt ααβωβε=?+? 将摇臂的角速度,角加速度带入可以得到: cos cos sin sin sin()sin() V V T V T T T dh l h l h dt l l ωγ γββωαγαγ''=?=--
磁悬浮列车的工作原理及技术经济特性
磁悬浮机车及技术经济特性 魏庆朝,冯雅薇(北京交通大学土木建筑工程 学院翃北京 100044) 施翃翃(北京城建设计研究总院 北京 100037) 摘要:直线电机已开始在磁悬浮铁路、城市轨道交通中应用。介绍了直线电机的分类、3种典型的磁悬浮铁路和直线电机驱动的轮轨交通,对上述交通方式的技术经济特征进行了对比,总结了上述交通方式的适用范围。 关键词:直线电机;磁悬浮;城市轨道交通;适用范围 The Modes and features of the Transit Systems Driven by Linear Motor WEI Qingchao1, FENG Yawei1, SHI Hong1,2 (1. School of Civil Engineering and Architecture, Beijing Jiaotong University 2. Beijing Urban Engineering Design & Research Institute.) Abstract: Linear motor has been successfully used in Meglev transit system and rapid rail transit system for years. The transit systems driven by linear motor are classified as Maglev system and wheel-rail system. The typical Maglev system includes Japanese MLX system, German TransRapid system and Japanese HSST system. The technical and economic features of these systems are compared and the suitable application fields of these systems are summarized in the paper. Keywords: linear motor; Maglev; urban rapid rail transit; suitable application fields 1、引言 从1825年世界第一条铁路出现算起,轨道交通已有近180年的历史。特别是上个世纪中叶以来,随着科技的进步,轨道交通运输方式不仅在诸如速度、密度、重量等性能方面有了很大提高,而且轨道交通方式本身也发生了巨大的变革。快速轨道交通有地铁、轻轨、单轨等多种方式。牵引方式历经蒸汽牵引、内燃牵引、电力牵引等阶段,目前在世界范围内又发展出直线电机牵引的交通方式,包括磁悬浮铁路、直线电机轮轨交通、磁悬浮飞机等。该交通方式目前正在迅速发展,将来会成