二阶系统性能改善及稳定性综述
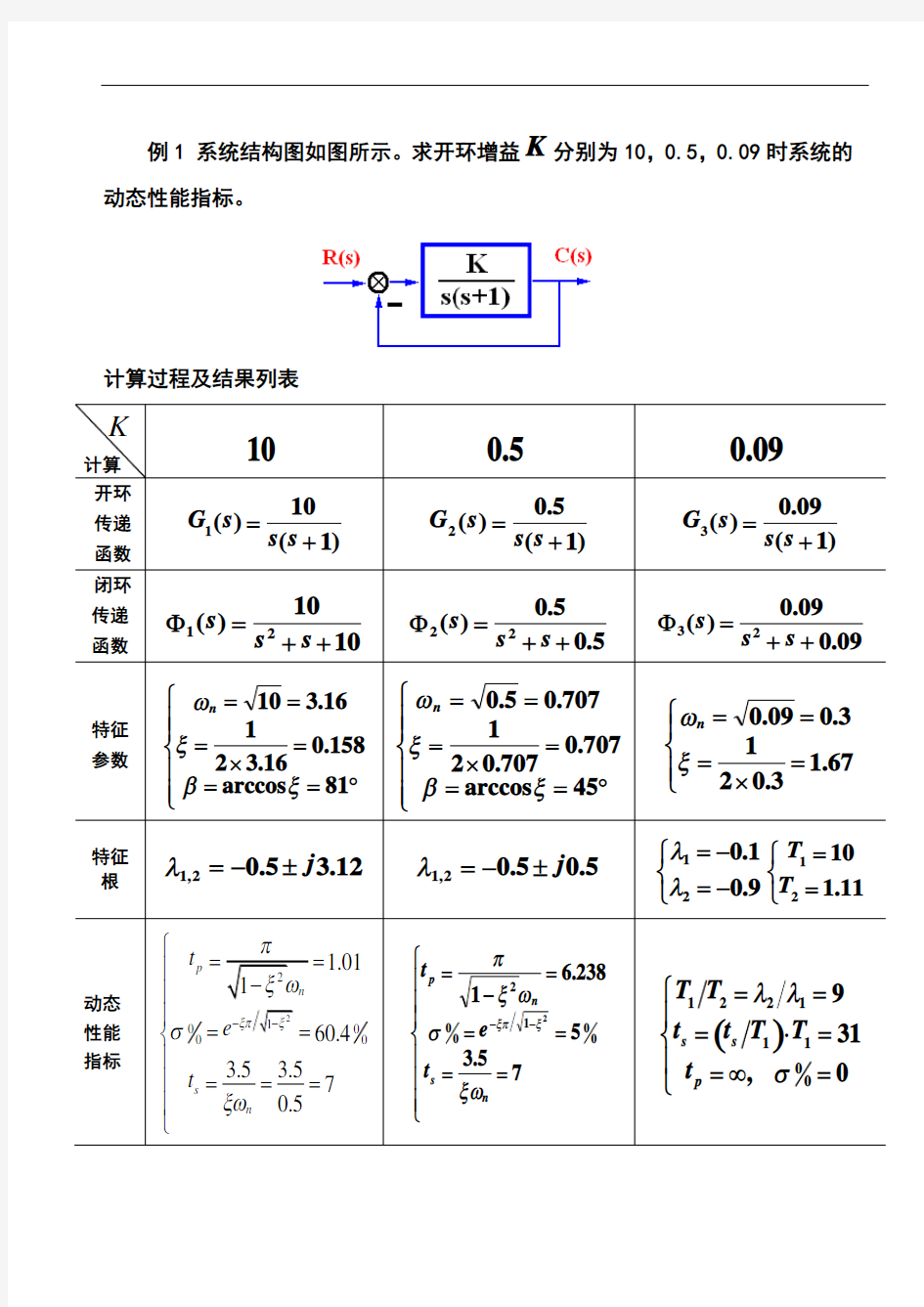

例1 系统结构图如图所示。求开环增益K分别为10,0.5,0.09时系统的动态性能指标。
计算过程及结果列表
K
计算
10 0.5 0.09
开环
传递
函数
)1
(
10
)
(
1+
=
s
s
s
G
)1
(
5.0
)
(
2+
=
s
s
s
G
)1
(
09
.0
)
(
3+
=
s
s
s
G
闭环
传递
函数10
10
)
(
2
1+
+
=
Φ
s
s
s
5.0
5.0
)
(
2
2+
+
=
Φ
s
s
s
09
.0
09
.0
)
(
2
3+
+
=
Φ
s
s
s
特征
参数
?
?
?
??
?
?
?
=
=
=
?
=
=
=
81
arccos
158
.0
16
.3
2
1
16
.3
10
ξ
β
ξ
ω
n
?
?
?
??
?
?
?
=
=
=
?
=
=
=
45
arccos
707
.0
707
.0
2
1
707
.0
5.0
ξ
β
ξ
ω
n
??
?
?
?
=
?
=
=
=
67
.1
3.0
2
1
3.0
09
.0
ξ
ω
n
特征
根
12
.3
5.0
2,1
j
±
-
=
λ5.0
5.0
2,1
j
±
-
=
λ
?
?
?
-
=
-
=
9.0
1.0
2
1
λ
λ
?
?
?
=
=
11
.1
10
2
1
T
T
动态
性能
指标
2
2
1
00
00
1.01
1
60.4
3.5 3.5
7
0.5
p
n
s
n
t
e
t
ξπξ
π
ξω
σ
ξω
--
?
==
?
-
?
?
==
?
?
?===
?
?
?
?
?
?
?
?
?
?
?
=
=
=
=
=
-
=
-
-
7
5.3
5
238
.6
1
1
2
2
n
s
n
p
t
e
t
ξω
σ
ω
ξ
π
ξ
ξπ()
1221
11
9
31
,0
s s
p
T T
t t T T
t
λλ
σ
?==
?
=?=
?
?=∞=
?
调整参数可以在一定程度上改善系统性能,但改善程度有限
§3.3.4 改善二阶系统动态性能的措施
(1) 测速反馈 —— 增加阻尼 (2) 比例+微分 —— 提前控制
例 2 在如图所示系统中分别采用测速反馈和比例+微分控制,其中
10K =,216.0=t K 。分别写出各系统的开环传递函数、闭环传
递函数,计算动态性能指标(σ%,s t )并进行对比分析。
原系统、测速反馈和比例+分控制方式下系统性能的计算及比较
原系统 测速反馈
比例 + 微分
系统 结构图
开环 传递函数 )1(10
)(+=s s s G a
)
1()
1(10)(++=s s s K s G t b
)
1()
1(10)(++=s s s K s G t c
闭环 传递函数 210()10a s s s Φ=++ 10)101(10)(2+++=Φs K s s t b 10)101()1(10)(2++++=Φs K s s K s t
t c 系统参数
ξ
0.158
1100.216
210
+?=0.5
1100.216
210
+?=0.5
n ω
10 3.16= 10 3.16=
10 3.16=
开环
零点 — -4.63 -4.63 极点 0,-1 0,-1 0,-1
闭环
零点 — — 110.216
t z K --===-4.63
极点 -0.5±j3.12
-1.58±j2.74
-1.58±j2.74
动态 性能
p t
1.01 1.15 0.9 0
0σ
60.4% 16.3% 21.4% s t
7
2.2
2.1
零点极点法 ( P75 表3-7 )
9.074
.273.014.3=-=-=
D t p θ
π
1 1.580.9
0004.121.44.63
p t E e e F σσ--?===
258
.163.41.474.216.3ln 3ln 31=?
?? ?????? ??+=??? ?????? ??+=σF E D A t s
p t D
π-θ
= ,%100%1p t e F E σσ-= 1
3ln s A E D F t ????
+ ???
????=σ
●改善系统性能的机理:测速反馈——增加阻尼
比例+微分——提前控制[仿真计算]●附加开环零点对系统性能的影响
●附加闭环零/极点对系统性能的影响
毕设论文几种典型非线性系统的稳定性研究与仿真
****大学 毕业设计(论文) 题目:几种典型非线性系统的稳定性 研究与仿真 专业:电气工程及其自动化 学生姓名: ********* 班级学号: ************* 指导教师: *********** 指导单位:自动化学院电气信息工程系 日期:*************************
摘要 论文对MATLAB软件进行了简单的介绍,详细介绍了非线性系统的特点,并且对它的稳定性进行了简要的分析。另外,论文对非线性系统的非线性环节的特性进行了介绍。接下来,论文详细讲解了描述函数的定义和求法,而且给出了两种非线性环节的描述函数。在第四章里面,论文对继电器型非线性系统和滞环非线性系统进行了仿真分析,并且运用nyquist定理对系统的稳定性进行了判定。关键词:非线性系统;稳定性;描述函数;非线性环节;
ABSTRACT The article simple introduced MATLAB software and the characteristics of non-linear system, also the article analysis its stability in detail. In addition, the article introduced the characteristics of the nonlinear system links. the article explained in detail the definition and solution of the Description function and also the article gave the Description function of two nonlinear links. In the fourth chapter there, the article simulated the relay nonlinear system and hysteresis nonlinear systemand use nyquist theorem finding the stability of the system. Key words: nonlinear systems, stability, Description function, nonlinear system link;
二阶系统性能改善与稳定性
例1 系统结构图如图所示。求开环增益K分别为10,0.5,0.09时系统的动态性能指标。 计算过程及结果列表 K 计算 10 0.5 0.09 开环 传递 函数 )1 ( 10 ) ( 1+ = s s s G )1 ( 5.0 ) ( 2+ = s s s G )1 ( 09 .0 ) ( 3+ = s s s G 闭环 传递 函数10 10 ) ( 2 1+ + = Φ s s s 5.0 5.0 ) ( 2 2+ + = Φ s s s 09 .0 09 .0 ) ( 2 3+ + = Φ s s s 特征 参数 ? ? ? ?? ? ? ? = = = ? = = = 81 arccos 158 .0 16 .3 2 1 16 .3 10 ξ β ξ ω n ? ? ? ?? ? ? ? = = = ? = = = 45 arccos 707 .0 707 .0 2 1 707 .0 5.0 ξ β ξ ω n ?? ? ? ? = ? = = = 67 .1 3.0 2 1 3.0 09 .0 ξ ω n 特征 根 12 .3 5.0 2,1 j ± - = λ5.0 5.0 2,1 j ± - = λ ? ? ? - = - = 9.0 1.0 2 1 λ λ ? ? ? = = 11 .1 10 2 1 T T 动态 性能 指标 2 2 1 00 00 1.01 1 60.4 3.5 3.5 7 0.5 p n s n t e t ξπξ π ξω σ ξω -- ? == ? - ? ? == ? ? ?=== ? ? ? ? ? ? ? ? ? ? ? = = = = = - = - - 7 5.3 5 238 .6 1 1 2 2 n s n p t e t ξω σ ω ξ π ξ ξπ() 1221 11 9 31 ,0 s s p T T t t T T t λλ σ ?== ? =?= ? ?=∞= ?
系统优化最佳方案
WindowsXP终极优化设置(精心整理篇) 声明:以下资料均是从互联网上搜集整理而来,在进行优化设置前,一定要事先做好备份!!! ◆一、系统优化设置 ◆1、系统常规优化 1)关闭系统属性中的特效,这可是简单有效的提速良方。点击开始→控制面板→系统→高级→性能→设置→在视觉效果中,设置为调整为最佳性能→确定即可。 2)“我的电脑”-“属性”-“高级”-“错误报告”-选择“禁用错误汇报”。 3)再点“启动和故障恢复”-“设置”,将“将事件写入系统日志”、“发送管理警报”、“自动重新启动”这三项的勾去掉。再将下面的“写入调试信息”设置为“无”。 4)“我的电脑”-“属性”-“高级”-“性能”-“设置”-“高级”,将虚拟内存值设为物理内存的2.5倍,将初始大小和最大值值设为一样(比如你的内存是256M,你可以设置为640M),并将虚拟内存设置在系统盘外(注意:当移动好后要将原来的文件删除)。 5)将“我的文档”文件夹转到其他分区:右击“我的文档”-“属性“-“移动”,设置 到系统盘以外的分区即可。 6)将IE临时文件夹转到其他分区:打开IE浏览器,选择“工具“-“internet选项”-“常规”-“设置”-“移动文件夹”,设置设置到系统盘以外的分区即可。 ◆2、加速XP的开、关机 1)首先,打开“系统属性”点“高级”选项卡,在“启动和故障恢复”区里打开“设置”,去掉“系统启动”区里的两个√,如果是多系统的用户保留“显示操作系统列表的时间”的√。再点“编辑”确定启动项的附加属性为/fastdetect而不要改为/nodetect,先不要加/noguiboot属性,因为后面还要用到guiboot。 2)接下来这一步很关键,在“系统属性”里打开“硬件”选项卡,打开“设备管理器”,展开“IDE ATA/ATAPI控制器”,双击打开“次要IDE通道”属性,点“高级设置”选 项卡,把设备1和2的传送模式改为“DMA(若可用)”,设备类型如果可以选择“无”就选为“无”,点确定完成设置。同样的方法设置“主要IDE通道”。
linux_操作系统优化方案
按照传统,Linux不同的发行版本和不同的内核对各项参数及设置均做了改动,从而使得系统能够获得更好的性能。下边将分四部分介绍在Red Hat Enterprise Linux AS和SUSE LINUX Enterprise Server系统下,如何用以下几种技巧进行性能的优化: 1、Disabling daemons (关闭daemons) 2、Shutting down the GUI (关闭GUI) 3、C hanging kernel parameters (改变内核参数) 4、Kernel parameters (内核参数) 5、Tuning the processor subsystem(处理器子系统调优) 6、Tuning the memory subsystem (内存子系统调优) 7、Tuning the file system(文件系统子系统调优) 8、Tuning the network subsystem(网络子系统调优) 1 关闭daemons 有些运行在服务器中的daemons (后台服务),并不是完全必要的。关闭这些daemons可释放更多的内存、减少启动时间并减少C PU处理的进程数。减少daemons数量的同时也增强了服务器的安全性。缺省情况下,多数服务器都可以安全地停掉几个daemons。 Table 10-1列出了Red Hat Enterprise Linux AS下的可调整进程. Table 10-2列出了SUSE LINUX Enterprise Server下的可调整进程
注意:关闭xfs daemon将导致不能启动X,因此只有在不需要启动GUI图形的时候才可以关闭xfs daemon。使用startx 命令前,开启xfs daemon,恢复正常启动X。 可以根据需要停止某个进程,如要停止sendmail 进程,输入如下命令: Red Hat: /sbin/service sendmail stop SUSE LINUX: /etc/init.d/sendmail stop 也可以配置在下次启动的时候不自动启动某个进程,还是send mail: Red Hat: /sbin/chkconfig sendmail off SUSE LINUX: /sbin/chkconfig -s sendmail off 除此之外,LINUX还提供了图形方式下的进程管理功能。对于Red Hat,启动GUI,使用如下命令:/usr/bin/redhat-config-serv ices 或者鼠标点击M ain M enu -> System Settings -> Serv er Settings -> Serv ices.
非线性动力学之一瞥_Lorenz系统
非线性动力学 非线性系统之一瞥——Lorenz系统 2013-01-30
0 前言 0.1非线性系统动力学 线性系统是状态变量和输出变量对于所有可能的输入变量和初始状态都满足叠加原理的系统;非线性系统就是这些量不满足叠加原理的系统。非线性系统在日常生活和自然界中不胜枚举,也远远多于线性系统。 非线性动力学是研究非线性系统的各种运动状态的定性和定量变化规律,尤其是系统的长时期行为。研究的对象主要有分叉、混沌和孤立子等。 0.2洛伦兹方程 洛伦兹方程是美国气象学家洛伦兹在模拟天气这一非周期性现象时确定,这个方程的三个变量分别模拟温度、湿度和压力。可以得出结论,初期微小的差别随着时间推移差别会越来越大,洛伦兹基于此提出长期的天气预报是不可能的。这也被视为研究非线性混沌理论的开始,所以洛伦兹系统在研究非线性系统中具有举足轻重的地位。本文借助洛伦兹系统对非线性进行简单的介绍。洛伦兹方程如下。 方程中,、和都为实参数。实参不同,系统的奇点及数目也是不同的。
1 奇点和稳定性 1.1 奇点 洛伦兹系统含有三个实参数,当参数变化,奇点的数目可能不同。首先,一定是系统的奇点。时,当时,系统仅有一个奇点;当时,系统还有另外两个奇点。 下面仅解时的两个非原点奇点。令 方程第一式得,第三式可得,将两式代入第二式得 即,。 1.2 奇点稳定性判别 下面根据Liapunov稳定性判别方法,找出系统在原点处大围渐进稳定的条件,取Liapunov函数。考虑,的情况。则有 将洛伦兹方程 代入上式,可得 变换为二次型,系数矩阵为
已知,,则系数矩阵负定的条件是。所以该系统是大围渐进稳定的条件是,前提是,。 Liapunov函数V总是存在的,只要构造出合适的Liapunov函数,就可以通过Liapunov稳定性定理直接判断奇点的稳定性,而不需要求解非线性方程组。有的Liapunov函数不易构造,则可以通过奇点处导算子的特征值来判断:若所有的特征值实部都小于0,则方程组在该奇点是局部渐进稳定的;若特征值实部至少有一个为正,该奇点是不稳定的。仍以洛伦兹系统为例,求出导算子的特征值。 特征矩阵的行列式(特征方程)为 特征值 显然,当,时,,,要使方程在原点处渐进稳定,必须小于0,因此 两边同时平方可得 因此
阶系统性能改善及稳定性
例1 系统结构图如图所示。求开环增益K 分别为10,,时系统的动态性能指标。 计算过程及结果列表 K 计算 10 开环 传递 函数 )1(10 )(1+= s s s G )1(5 .0)(2+= s s s G )1(09 .0)(3+= s s s G 闭环 传递 函数 10 10 )(21++= Φs s s 5 .05 .0)(22++= Φs s s 09 .009 .0)(23++= Φs s s 特征参数 ?? ? ? ????===?===81arccos 158.016.32116.310ξβξωn ?? ? ? ????===?===45arccos 707.0707.021707 .05.0ξβξωn ?? ? ??=?===67.13.0213 .009.0ξωn 特征 根 12.35.02,1j ±-=λ 5.05.02,1j ±-=λ ???-=-=9.01.021λλ???==11.1102 1T T 动态 性能 指标 2 2 100001.01160.43.5 3.5 7 0.5p n s n t e t ξπξπξωσξω--? ==?-??==???===?? ???? ????? =====-=--7 5 .35238.61001002 2 n s n p t e t ξωσωξπξξπ ()122111009 31,0 s s p T T t t T T t λλσ?==? =?=??=∞=?
调整参数可以在一定程度上改善系统性能,但改善程度有限 §3.3.4 改善二阶系统动态性能的措施 (1) 测速反馈 —— 增加阻尼 (2) 比例+微分 —— 提前控制 例 2 在如图所示系统中分别采用测速反馈和比例+微分控制,其中 10K =,216.0=t K 。分别写出各系统的开环传递函数、闭环传 递函数,计算动态性能指标(σ%,s t )并进行对比分析。
PhotoShopCC运行缓慢甚至卡死的系统性能优化方法
PhotoShopCC运行缓慢甚至卡死的系统性能优化方法 PhotoshopCC是迄今为止功能最强大的图像处理软件之一,而不少网友对于PhotoshopCC也可谓是又爱又恨。爱很好理解,因为PhotoshopCC能帮助我们高效率地进行各种图像处理;而恨呢,则是因为随着PhotoshopCC功能的日益强大,对电脑配置要求也相应提高,运行过程中很可能会出现相应缓慢甚至是停止相应的情况。笔者作为一个UI设计师,每天都要跟那些尺寸不大但却有着许多图层的图像打交道,因此对于PS性能优化还是有一些心得的。这里,我们就针对PSCC运行缓慢或停止相应这一问题提出一些性能优化建议。当然,你可以根据你的工作流程来参考使用这些优化建议,至于优化效果,一定会让你记忆深刻。PS性能优化技巧分享PS性能优化通用技巧这里,我们先介绍一些PS性能优化的通用技巧,不管你用PS来干什么,这些PS性能优化技巧都能帮你提高工作效率。一、文件大小和尺寸作为一名UI设计师,笔者通常使用的文件格式就是PSD,为了确保图像的兼容性,Adobe 对PSD文件的大小限定为最大2GB。当PS运行变慢的时候,你第一件要做的事情就应该是检查文件大小。如果你的应用的每一屏都在同一个PSD里面,文件大小可以非常快就确定下来,尤其是你还要添加图层组合的时候。在Photoshop CC 14.2以后的版本,PS中新增了“链接到智能对象”功能,该功能的出现可让你的应用用到多个文件中,在长期的更新过程中减去许多麻烦。笔者目前开始做的就是利用该功能来打破一些设计,它不仅能保持PS运行
流畅,还能让笔者更加灵活地设计应用的每一屏。除PSD之外,Adobe对其他文件类型的大小也设置有一些限制。如没有文件可以大于300000x300000像素,PDF文件大小也不能超过10GB。不过使用PS的大型文档格式则不需要担心,这些文件大小的限制为4EB(4000000百万兆字节)。二、效率指示想要知道你的PSD占用了多少系统资源,这是一个十分简便的方法。在PSCC 工作区的左下方有一个指示,可现实当前的文件信息。默认状态下,它显示的是“文件大小”,类似“文档:12.5M/384.5M”这样的指示。这时,点击好似播放按钮的符号“?”,就可以按照你的喜好进行自定义设置显示内容,其中就包括“效率”这一项。图01 调出“效率”这一显示内容后,一般显示的会是“效率:100%”。而当该数值低于100%的时候,则意味着你并未分配足够的内存给PS,这时候PS会调用磁盘空间来支持运转,PS的图像处理运行自然会慢下来。如果你看到该数值已经低过90%了,那么你就该分配更多的内存给PS。当然,这里我们稍后再做详细解说。不过如果你是在全屏模式下工作,则该指示会隐藏起来,但我们可以通过信息面板查看到相关信息。图02 此外,还有两种方法可以释放一些内存:1、清理“还原”“剪贴板”和“历史”(编辑>清除>所有)2、关闭所有你现在不使用的文件86ps素材网小提示:这里要注意一点的是,清理这个功能虽然非常有效,但却是不可逆的操作。如果你觉得你有可能会想要把图像恢复至之前的某个步骤中的样子,那么就仅仅清理剪贴板就OK了。三、
自动控制原理实验——二阶系统的动态过程分析
实验二二阶系统的动态过程分析 一、 实验目的 1. 掌握二阶控制系统的电路模拟方法及其动态性能指标的测试技术。 2. 定量分析二阶系统的阻尼比ξ和无阻尼自然频率n ω对系统动态性能的影响。 3. 加深理解“线性系统的稳定性只与其结构和参数有关,而与外作用无关”的 性质。 4. 了解和学习二阶控制系统及其阶跃响应的Matlab 仿真和Simulink 实现方法。 二、 实验内容 1. 分析典型二阶系统()G s 的ξ和n ω变化时,对系统的阶跃响应的影响。 2. 用实验的方法求解以下问题: 设控制系统结构图如图2.1所示,若要求系统具有性能: %20%,1,p p t s σσ=== 试确定系统参数K 和τ,并计算单位阶跃响应的特征量d t ,r t 和s t 。 图2.1 控制系统的结构图 3. 用实验的方法求解以下问题: 设控制系统结构图如图2.2所示。图中,输入信号()r t t θ=,放大器增益A K 分别取13.5,200和1500。试分别写出系统的误差响应表达式,并估算其性能指标。 图2.2 控制系统的结构图
三、实验原理 任何一个给定的线性控制系统,都可以分解为若干个典型环节的组合。将每个典型环节的模拟电路按系统的方块图连接起来,就得到控制系统的模拟电路图。 通常,二阶控制系统 2 22 () 2 n n n G s s ω ξωω = ++ 可以分解为一个比例环节、一个惯性环节和一个积分环节,其结构原理如图 2.3所示,对应的模拟电路图如图2.4所示。 图2.3 二阶系统的结构原理图 图2.4 二阶系统的模拟电路原理图 图2.4中:()(),()() r c u t r t u t c t ==-。 比例常数(增益系数)2 1 R K R =,惯性时间常数 131 T R C =,积分时间常数242 T R C =。其闭环传递函数为: 12 2 21 112 () 1 ()(1) c r K U s TT K K U s T s T s K s s T TT == ++++ (0.1) 又:二阶控制系统的特性由两个参数来描述,即系统的阻尼比ξ和无阻尼自然频
系统性能优化方案
系统性能优化方案 (第一章) 系统在用户使用一段时间后(1年以上),均存在系统性能(操作、查询、分析)逐渐下降趋势,有些用户的系统性能下降的速度非常快。同时随着目前我们对数据库分库技术的不断探讨,在实际用户的生产环境,现有系统在性能上的不断下降已经非常严重的影响了实际的用户使用,对我公司在行业用户内也带来了不利的影响。 通过对现有系统的跟踪分析与调整,我们对现有系统的性能主要总结了以下几个瓶颈: 1、数据库连接方式问题 古典C/S连接方式对数据库连接资源的争夺对DBServer带来了极大的压力。现代B/S连接方式虽然不同程度上缓解了连接资源的压力,但是由于没有进行数据库连接池的管理,在某种程度上,随着应用服务器的不断扩大和用户数量增加,连接的数量也会不断上升而无截止。 此问题在所有系统中存在。 2、系统应用方式(架构)问题(应用程序设计的优化) 在业务系统中,随着业务流程的不断增加,业务控制不断深入,分析统计、决策支持的需求不断提高,我们现有的业务流程处理没有针对现有的应用特点进行合理的应用结构设计,例如在‘订单、提油单’、‘单据、日报、帐务的处理’关系上,单纯的数据关系已经难以承载多元的业务应用需求。 3、数据库设计问题(指定类型SQL语句的优化)
目前在系统开发过程中,数据库设计由开发人员承担,由于缺乏专业的数据库设计角色、单个功能在整个系统中的定位模糊等原因,未对系统的数据库进行整体的分析与性能设计,仅仅实现了简单的数据存储与展示,随着用户数据量的不断增加,系统性能逐渐下降。 4、数据库管理与研究问题(数据存储、物理存储和逻辑存储的优化) 随着系统的不断增大,数据库管理员(DBA)的角色未建立,整个系统的数据库开发存在非常大的随意性,而且在数据库自身技术的研究、硬件配置的研究等方面未开展,导致系统硬件、系统软件两方面在数据库管理维护、研究上无充分认可、成熟的技术支持。 5、网络通信因素的问题 随着VPN应用技术的不断推广,在远程数据库应用技术上,我们在实际设计、开发上未充分的考虑网络因素,在数据传输量上的不断加大,传统的开发技术和设计方法已经无法承载新的业务应用需求。 针对以上问题,我们进行了以下几个方面的尝试: 1、修改应用技术模式 2、建立历史数据库 3、利用数据库索引技术 4、利用数据库分区技术 通过尝试效果明显,仅供参考!
SQL2019系统性能优化解决方案共12页文档
SQL Server 系统性能调优解决方案 前言 近几年,医药流通市场经历了激烈的震荡,导致行业逐步成熟和企业的快速变革,差异化经营成为众多医药流通的竞争选择。时空产品在中国医药流通企业的发展过程中得到了广泛且深入应用,大量的客户化开发和定制支撑了企业管理中横向和纵向的变化,很好的适应了企业在发展过程中不断变化的需求。 对于数据库管理系统的使用,很多用户都面临着一个很棘手的问题:系统效率下降。产生效率下降的因素是多方面: 1.硬件问题 2.软件问题 3.实施问题 正因为产生效率下降的因素很多,所以如何去查找原因成为我们首要关注的问题,时空公司也处在积极探索过程中。时空公司在解决一些客户问题的过程中积累了一些方法和思路,归纳总结后呈现给体系内的技术人员,本方案就系统效率调整所必需的基础知识、方法、技巧等几个方面进行阐述,从而让技术人员能够快速定位问题,解决问题,为合作伙伴提供优质,快捷的服务。 索引简介 索引是根据数据库表中一个或多个列的值进行排序的结构。索引提供指针以指向存储在表中指定列的数据值,然后根据指定的排序次序排列这些指针。数据库使用索引的方式与使用书的目录很相似,通过搜索索引找到特定的值,然后跟随指针到达包含该值的行。 索引键:用于创建索引的列。 索引类型 ?聚集索引: 聚集索引基于数据行的键值在表内排序和存储这些数据行。由于数据行按基于聚集索引键的排序次序存储,因此聚集索引对查找行很有效。每个表只能有一个聚集索引,因为数据行本身只能按一个顺序存储。数据行本身构成聚集索引的最低级别(叶子节点)。只有当表包含聚集索引时,表内的数据行才按排序次序存储。如果表没有聚集索引,则其数据行按堆集方式存储。 聚集索引对于那些经常要搜索范围值的列特别有效。使用聚集索引找到包含第一个值的行后,便可以确保包含后续索引值的行在物理相邻。例如:如果应用程序执行的一个查询经常检索某一日期范围内的记录,则使用聚集索引可以迅速找到包含开始日期的行,然后检索表中所有相邻的行,直到到达结束日期。这样有助于提高此类查询的性能。同样,如果对从表中检索的数据进行排序时经常要用到某一列,则可以将该表在该列上聚集(物理排序),避免每次查询该列时都进行排序,从而节省成本。 ?非聚集索引 非聚集索引具有完全独立于数据行的结构。非聚集索引的最低行包含非聚集索引的键值,并且每个键值项都有指针指向包含该键值的数据行。数据行不按基于非聚集键的次序存储。如
二阶系统的性能指标
二阶系统的性能指标 控制系统的性能指标是评价系统动态品质的定量指标,是定量分析的基础。 系统的时域性能指标通常通过系统的单位阶跃响应进行定义。常见的性能指标有:上升时间t r 、峰值时间t p 、调整时间t s 、最大超调量M p 、振荡次数N 。 1.评价系统快速性的性能指标 上升时间t r 响应曲线从零时刻出发首次到达 稳态值所需时间。对无超调系统, 上升时间一般定义为响应曲线从 稳态值的10%上升到90%所需 的时间。 峰值时间t p 响应曲线从零上升到第一个峰值 所需时间。 调整时间t s 响应曲线到达并保持在允许误差 范围(稳态值的±2%或±5%)内所 需的时间。 2.评价系统平稳性的性能指标 ? 最大超调量M p 响应曲线的最大峰值与稳态值之差。通常用百分数表示: %100)() ()(?∞∞-≡o o p o p x x t x M 若x o (t p ) < x o (∞),则响应无超调。 ? 振荡次数N 在调整时间t s 内系统响应曲线的振荡次数。实测时,可按响应曲线穿越稳态值次数的一半计数。 3.欠阻尼二阶系统的时域性能指标 ? 上升时间t r 欠阻尼二阶系统的阶跃响应为:0),sin(11)(2≥+--=-t t e t x d t o n ?ωξξω 根据上升时间的定义有:()1sin 11)(2=+--=-?ωξξωr d t r o t e t x r n 2221arccos 11ξωξ πξωξξπω?π--=---=-=n n d r arctg t 显然, ξ一定时,ωn 越大,t r 越小; ωn 一定时,ξ 越大,t r 越大。 ? 峰值时间t p 令0)(=dt t dx o ,并将t = t p 代入可得:21ξ ωπωπ-==n d p t
二阶系统性能改善及稳定性
例1 系统结构图如图所示。求开环增益K分别为10,,时系统的动态性能指标。 计算过程及结果列表 K 计算 10 开环 传递 函数 )1 ( 10 ) ( 1+ = s s s G )1 ( 5.0 ) ( 2+ = s s s G )1 ( 09 .0 ) ( 3+ = s s s G 闭环 传递 函数 10 10 ) ( 2 1+ + = Φ s s s 5.0 5.0 ) ( 2 2+ + = Φ s s s 09 .0 09 .0 ) ( 2 3+ + = Φ s s s
调整参数可以在一定程度上改善系统性能,但改善程度有限 §3.3.4 改善二阶系统动态性能的措施 (1) 测速反馈 —— 增加阻尼 (2) 比例+微分 —— 提前控制 例 2 在如图所示系统中分别采用测速反馈和比例+微分控制,其中 10K =,216.0=t K 。分别写出各系统的开环传递函数、闭环传 递函数,计算动态性能指标(σ%,s t )并进行对比分析。
原系统、测速反馈和比例+分控制方式下系统性能的计算及比较原系统测速反馈比例 + 微分系统 结构图 开环 传递函数 )1 ( 10 ) ( + = s s s G a)1 ( )1 ( 10 ) ( + + = s s s K s G t b)1 ( )1 ( 10 ) ( + + = s s s K s G t c 闭环 传递函数 2 10 () 10 a s s s Φ= ++10 ) 10 1( 10 )( 2+ + + = Φ s K s s t b10 ) 10 1( )1 ( 10 ) ( 2+ + + + = Φ s K s s K s t t c 系ξ1100.216 210 +? = 1100.216 210 +? =
二阶及高阶控制系统性能改善
实验二二阶及高阶控制系统性能改善 1.教材P80-82中指出,在工程实践中可通过在系统中增加合适的附加装置改善二阶系统的性能,比如增加比例微分控制器,或 者增设微分负反馈,可使得欠阻尼二阶系统的等效阻尼比增大,从而使系统超调量减小。设计一个验证程序,通过绘制阶跃响 应曲线和性能参数计算,验证相关观点的正确性。 程序: s=tf('s'); wn=4;kesai=0.4; G1=(wn^2)/(s*(s+2*kesai*wn)); step(feedback(G1,1),5); grid on; figure; for tao=0.2:0.05:0.3; G2=(tao*s+1)*(wn^2)/(s*(s+2*kesai*wn)); step(feedback(G2,1),2.5);hold on; end figure; for tao=0.1:0.1:1; G3=(wn^2)/(s^2+2*kesai*wn*s+tao*s*(wn^2)); step(feedback(G3,1));hold on; end 绘制原始响应曲线与改善后响应曲线如图:
改造前,超调量25.4%,调节时间2.1秒 增加比例微分控制后,当tao=0.2时,超调量3.13%,调节时间1.21秒 Step Response Time (sec)A m p l i t u d e 00.2 0.4 0.6 0.81 1.21.4
增加微分负反馈控制后,当tao=0.1时,超调量9.48%,调节时间1.49秒 当tao=.02时,超调量1.52%,调节时间0.939秒 2.如图1所示的高阶系统属于结构不稳定系统,无论放大系数K 如何取值,系统都不稳定,试验证之。结合教材P89中介绍的方法,如将系统中的一个积分环节改为惯性环节,或者在系统前加入比例微分控制,只要参数合适,不但可使之稳定还可获得不错的性能指标。试编程绘制改造前后的阶跃响应曲线,并计算改造后的性能参数以证明之。(设T=2)
一二阶系统频率特性测试与分析
广西大学实验报告纸 姓名: 指导老师:胡老师 成绩: 学院:电气工程学院 专业:自动化 班级:121 实验内容:零、极点对限性控制系统的影响 2014年 11月 16 日 【实验时间】2014年11月14日 【实验地点】宿舍 【实验目的】 1. 掌握测量典型一阶系统和二阶系统的频率特性曲线的方法; 2. 掌握软件仿真求取一、二阶系统的开环频率特性的方法; 3. 学会用Nyquist 判据判定系统的稳定性。 【实验设备与软件】 1. labACT 实验台与虚拟示波器 2. MATLAB 软件 【实验原理】 1.系统的频率特性测试方法 对于现行定常系统,当输入端加入一个正弦信号)sin()(t X t X m ωω=时,其稳态输出是一个与输入信号频率相同,但幅值和相位都不同的正弦信号 )sin()()sin()(ψωωψω+=+=t j G X t Y s Y m m 。 幅频特性:m m X Y j G /)(=ω,即输入与输出信号的幅度比值,通常转换成)(lg 20ωj G 形式。 相频特性:)(arg )(ωω?j G =,可以直接基于虚拟示波器读取,也可以用“李沙育图行”法得到。 可以将用Bode 图或Nyquist 图表示幅频特性和相频特。 在labACT 试验台采用的测试结构图如下:
被测定稳定系统对于实验就是有源放大电路模拟的一、二阶稳定系统。 2.系统的频率测试硬件原理 1)正弦信号源的产生方法 频率特性测试时,一系列不同频率输入正弦信号可以通过下图示的原理产生。按照某种频率不断变化的数字信号输入到DAC0832,转换成模拟信号,经一级运放将其转换为模拟电压信号,再经过一个运放就可以实现双极性电压输出。 根据数模转换原理,知 R V N V 8 012- = (1) 再根据反相加法器运算方法,得 R R R V N V N V R R V R R V 1281282282201210--=??? ??+-?-=??? ? ??+-= (2) 由表达式可以看出输出时双极性的:当N 大于128时,输出为正;反之则为负;当输入为128时,输出为0. 在labACT 实验箱上使用的参考电压时5V 的,内部程序可以产生频率范围是对一阶系统是0.5 H Z ~64H Z 、对二阶系统是0.5 H Z ~16 H Z 的信号,并由B2单元的OUT2输出。
web系统性能优化
WEB站点性能优化 由于较少的接触WAP站点的建设,缺乏类似站点的建设经验,导致后期的性能问题成了影响项目交付的较严重的因素。 经过后面深入的了解,发现浏览器在访问网站的过程中,有很多地方可以进行性能优化处理。案例分析: 首先,我们先来了解一下客户端(这里指终端浏览器)访问服务器的全过程。 以火狐3.6.8浏览器为例(图例来自火狐浏览插件firebug截图) 从上图可以看出,该页面前后一共向后台发送了6次请求,即建立6次连接。 ●过程一:第1次请求,url地址请求服务器,获得相应的页面html,该次请求需要服务器相 应的业务逻辑处理然后生成页面,花费的时间稍长。 ●过程二:第2、3次请求,终端浏览器接收到请求的html页面后,需要请求页面引入的外部 资源(如css样式,js脚本,图片等),此时请求过程是并行连接。 ●过程三:第4、5、6次请求,终端浏览器接收到css样式资源后,需要为css中引入的其他外 部资源(图片较为常见)再次发送请求,所有的图片请求也是并行连接,与此同时也会进行页面的渲染工作。
另外,过程二、过程三中提到的并行连接,在各种不同浏览器中体现出来的能力也不一样。 下图显示了每个支持当前的浏览器为HTTP/1.1中以及HTTP/1.0的服务器最大连接数。 简化的浏览器响应时间的计算模型: 终端用户响应时间= 页面下载时间+ 服务器响应时间+ 浏览器处理及渲染时间 页面下载时间= 页面大小/ 网络带宽+ (网络延迟×HTTP 请求数)/ 并发度 所以如果我们可以通过监听互联网应用的网络传输行为得到页面大小、HTTP 请求数、并发度、服务器响应时间和浏览器处理及渲染时间,那么我们就可以推测这个应用在任意网络环境下的终端用户响应时间 优化思路 从上面公式中可以看出,网络带宽、网络延迟由网络环境决定,是系统不可控的,并发度是终端浏览器本身具备的能力,也是系统不可控的。余下的公式参数页面尺寸,HTTP请求数则是我们需要找寻的突破点,我们可以从如下几个方向着手。 1. 减少连接次数 终端浏览器响应的时间中,有80%用于下载各项内容。这部分时间包括下载页面中的图像、样式表、脚本、Flash等。通过减少页面中的元素可以减少HTTP请求的次数。这是提高网页速度的关键步骤。 合并文件 是通过把所有的脚本放到一个文件中来减少HTTP请求的方法,如可以简单地把所有的CSS 文件都放入一个样式表中。当脚本或者样式表在不同页面中使用时需要做不同的修改,这可能会相对麻烦点,但即便如此也要把这个方法作为改善页面性能的重要一步。 CSS Sprites 是减少图像请求的有效方法。把所有的背景图像都放到一个图片文件中,然后通过CSS的background-image和background-position属性来显示图片的不同部分;
标准二阶系统的阶跃响应及性能分析
11级自动控制原理实验二 姓名:陈泉 学号:1104130103 班级:楼宇自动化01班 2013年11月26日星期二
1、标准二阶系统的阶跃响应及性能分析 考虑图2.2所示的标准二阶系统,假设ωn=1(这等价于ωn t为自变量),利用程序lab.3_1.m观察ζ=0.1,0.2,0.4,0.7,1.0,2.0时的系统单位阶跃响应,估计各自对应的性能水平,并将其与理论值进行比较。 解:Lab.3_1.m程序如下 t=[0:0.1:12]; num=[1]; zeta1=0.1; den1=[1 2*zeta1 1]; sys1=tf(num,den1); zeta2=0.2; den2=[1 2*zeta2 1]; sys2=tf(num,den2); zeta3=0.4; den3=[1 2*zeta3 1]; sys3=tf(num,den3); zeta4=0.7; den4=[1 2*zeta4 1]; sys4=tf(num,den4); zeta5=1.0; den5=[1 2*zeta5 1]; sys5=tf(num,den5); zeta6=2.0; den6=[1 2*zeta6 1]; sys6=tf(num,den6); [y1,T1]=step(sys1,t); [y2,T2]=step(sys2,t); [y3,T3]=step(sys3,t); [y4,T4]=step(sys4,t); [y5,T5]=step(sys5,t); [y6,T6]=step(sys6,t); plot(T1,y1,T2,y2,T3,y3,T4,y4,T5,y5,T6,y6)
一种有效的优化数据仓库性能的解决方案
第36卷第1期2004年2月 南 京 航 空 航 天 大 学 学 报Journal of Nanjing U niversity of Aeronautics &Astronautics V ol.36N o.1 F eb.2004一种有效的优化数据仓库性能的解决方案 何月顺1,2 ,丁秋林 1 (1.南京航空航天大学信息科学与技术学院,南京210016;2.东华理工学院计算机与通信系,江西,抚州,344000) 摘要:要在数据仓库环境中获得长期优良的性能最大的障碍就是发现数据仓库中大量的休眠数据;数据仓库中的海量数据隐藏了最终用户查询所需要的数据,降低了查询效率。用于提高数据仓库性能和减少休眠数据存储费用最有效的方法就是移除休眠数据。本文简要分析了休眠数据进入数据仓库的主要方式;改进了数据仓库中休眠数据量的统计方法,以便准确地计算休眠数据量的大小;设计了利用活动监视器监视运行于数据仓库的事务以便查找休眠数据;提出了用近线存储方案移除休眠数据和利用跨媒体存储器管理休眠数据的方法,取得了较好的应用效果。 关键词:数据仓库;休眠数据;近线存储;监视 中图分类号:T P 311.132.3 文献标识码:A 文章编号:1005-2615(2004)01-0108-04 基金项目:国家“863”高技术(863-511-810-041-03)资助项目。 收稿日期:2003-01-14;修订日期:2003-05-06 作者简介:何月顺,男,讲师,1971年9月生,E -mail :heys @ecgi .jx .cn ;丁秋林,男,教授,博士生导师,1936年生。 Efficient Solution for Optimizing Data Warehouse Performance H E Yue -shun 1,2 ,DI N G Qiu -lin 1 (1.Colleg e of Info rmat ion Science and T echnolog y , N anjing U niv ersit y of A er onautics &A str onautics,N anjing,210016,China; 2.Depar tment of Co mputer and Co mmunicat ion,East China I nstitute of T echno lo gy ,Jiang xi,F uzhou,344000,China) Abstract :The g reat obstacles are to find many idle data in data w arehouse and it w ants to keep its excellent per for mance fo r a long time .M any data w arehouses conceal the data what the user require and reduce the quer y efficiency .Remo ving the idle data fro m the data w ar ehouse is the m ost effective m ethod fo r im pro ving the perfo rmance and decreasing the fees for storag ing the idle data.The m ain modes are analy zed for the idle data spreading into data w arehouse.In or der to calculate the number of the idle data in data w arehouse the statistic m ethod is advanced .An active monito r is used to mo nitor the transactions that are w orking in data w arehouse for finding the idle data.Near line sto rage is used to remov e the idle data and the spanning m edium storage is utilized fo r managing the idle data.T he schem e achiev es a goo d effect in practice . Key words :data warehouse ;idle data ;near line sto rage ;m onito ring 数据仓库是一项基于数据管理和利用的综合性技术和解决方案。数据仓库中的数据是从许多业务处理系统中抽取、转换而来,对于这样一个复杂的企业数据环境,如何提高数据质量,以安全、高效的方式来对它们进行管理和适时的数据访问就变 得尤为重要。解决这一问题的关键因素之一就是对 大量休眠数据进行科学有效和及时的管理。大量休眠数据的存在是不利的,系统必须消耗大量资源来处理这些本来不予考虑的数据,从而降低整个系统的性能。
分析非线性系统的方法
非线性系统稳定性问题的判定方法和发展趋势 任何一个实际系统总是在各种偶然和持续的干扰下运动或工作的。所以,当系统承受干扰之后,能否稳妥地保持预订的运动轨迹或者工作状态,即系统的稳定性是首要考虑的。一个系统的稳定性,包括平衡态的稳定性问题和任一运动的稳定性问题。而对于给定运动的稳定性可以变换成关于平衡点的稳定性问题。 对平衡点的稳定性进行分析可将平衡点的稳定性定义为李雅普诺夫稳定、一致稳定、渐进稳定、一致渐近稳定、按指数渐进稳定和全局渐进稳定,除了全局渐进稳定,其他都是局部的概念。 非线性系统的数学模型不满足叠加原理或其中包含非线性环节。包括非本质非线性(能够用小偏差线性化方法进行线性化处理的非线性)和本质非线性(用小偏差线性化方法不能解决的非线性)。它与线性系统有以下主要区别: 1.线性控制系统只能有一个平衡点或无穷多的平衡点。但非线性系统可以有一个、二个、多个、以至无穷多个平衡点。非线性系统与线性定常系统明显不同,其稳定性是针对各个平衡点而言的。通常不能说系统的稳定性如何,而应说那个平衡点是稳定的或不稳定的。2.在线性系统中,系统的稳定性只与系统的结构和参数有关,而与外作用及初始条件无关。非线性系统的稳定性除了与系统的结构和参数有关外,还与外作用及初始条件有关。 由于非线性控制系统与线性控制系统有很大的差异,因此,不能直接用线性理论去分析它,否则会导致错误的结论。对非线性控制系统的分析,还没有一种象线性控制系统那么普遍的分析、设计方法。 现代广泛应用于非线性系统上的分析方法有基于频率域分析的描述函数法和波波夫超稳定性,还有基于时间域分析的相平面法和李雅普诺夫稳定性理论等。这些方法分别在一定的假设条件下,能提供关于系统稳定性或过渡过程的信息。而计算机技术的迅速发展为分析和设计复杂的非线性系统提供了有利的条件。另外,在工程上还经常遇到一类弱非线性系统,即特性和运动模式与线性系统相差很小的系统。对于这类系统通常以线性系统模型作为一阶近似,得出结果后再根据系统的弱非线性加以修正,以便得到较精确的结果。摄动方法是处理这类系统的常用工具。而对于本质非线性系统,则需要用分段线性化法等非线性理论和方法来处理。目前分析非线性控制系统的常用方法如下: 1、线性化方法 采用线性化模型来近似分析非线性系统。 这种近似一般只限于在工作点附近的小信号情况下才是正确的。这种线性化近似,只是对具有弱非线性(或称非本质非线性)的系统。 常用线性化方法,有正切近似法和最小二乘法。 此外,对一些物理系统的非线性特性比较显著,甚至在工作点附件的小范围内也是非线性的,并且不能用一条简单的直线来代表整个非线性系统特性的系统,可采用分段线性化方法。2、相平面法 相平面法是一种基于时域的分析方法,一种用图解法求解一、二阶非线性常微分方程的方法。 该方法通过图解法将一阶和二阶系统的运动过程转化为位置和速度平面上的相轨迹,从而比较直观、准确地反映系统的稳定性、平衡状态和稳态精度以及初始条件及参数对系统运动的影响。相轨迹的绘制方法步骤简单、计算量小,特别适用于分析常见非线性特性和一阶、二阶线性环节组合而成的非线性系统 对于分段线性的非线性系统来说,相平面分析法的步骤为: (1)用n条分界线(开关线,转换线)将相平面分成n个线性区域;(2)分别写出各个线性区域的微分方程;(3)求出各线性区的奇点位置并画出相平面图;