机器学习基础

前言:
找工作时(IT行业),除了常见的软件开发以外,机器学习岗位也可以当作是一个选择,不少计算机方向的研究生都会接触这个,如果你的研究方向是机器学习/数据挖掘之类,且又对其非常感兴趣的话,可以考虑考虑该岗位,毕竟在机器智能没达到人类水平之前,机器学习可以作为一种重要手段,而随着科技的不断发展,相信这方面的人才需求也会越来越大。
纵观IT行业的招聘岗位,机器学习之类的岗位还是挺少的,国内大点的公司里百度,阿里,腾讯,网易,搜狐,华为(华为的岗位基本都是随机分配,机器学习等岗位基本面向的是博士)等会有相关职位,另外一些国内的中小型企业和外企也会招一小部分。当然了,其中大部分还是百度北京要人最多,上百人。阿里的算法岗位很大一部分也是搞机器学习相关的。另外本人有幸签约了网易杭州研究院的深度学习算法岗位,打算从事机器学习领域至少5年。非常感谢小易收留了我!
下面是本人在找机器学习岗位工作时,总结的常见机器学习算法(主要是一些常规分类器)大概流程和主要思想,希望对大家找机器学习岗位时有点帮助。实际上在面试过程中,懂这些算法的基本思想和大概流程是远远不够的,那些面试官往往问的都是一些公司内部业务中的课题,往往要求你不仅要懂得这些算法的理论过程,而且要非常熟悉怎样使用它,什么场合用它,算法的优缺点,以及调参经验等等。说白了,就是既要会点理论,也要会点应用,既要有点深度,也要有点广度,否则运气不好的话很容易就被刷掉,因为每个面试官爱好不同。
朴素贝叶斯:
有以下几个地方需要注意:
1. 如果给出的特征向量长度可能不同,这是需要归一化为通长度的向量(这里以文本分类为例),比如说是句子单词的话,则长度为整个词汇量的长度,对应位置是该单词出现的次数。
2. 计算公式如下:
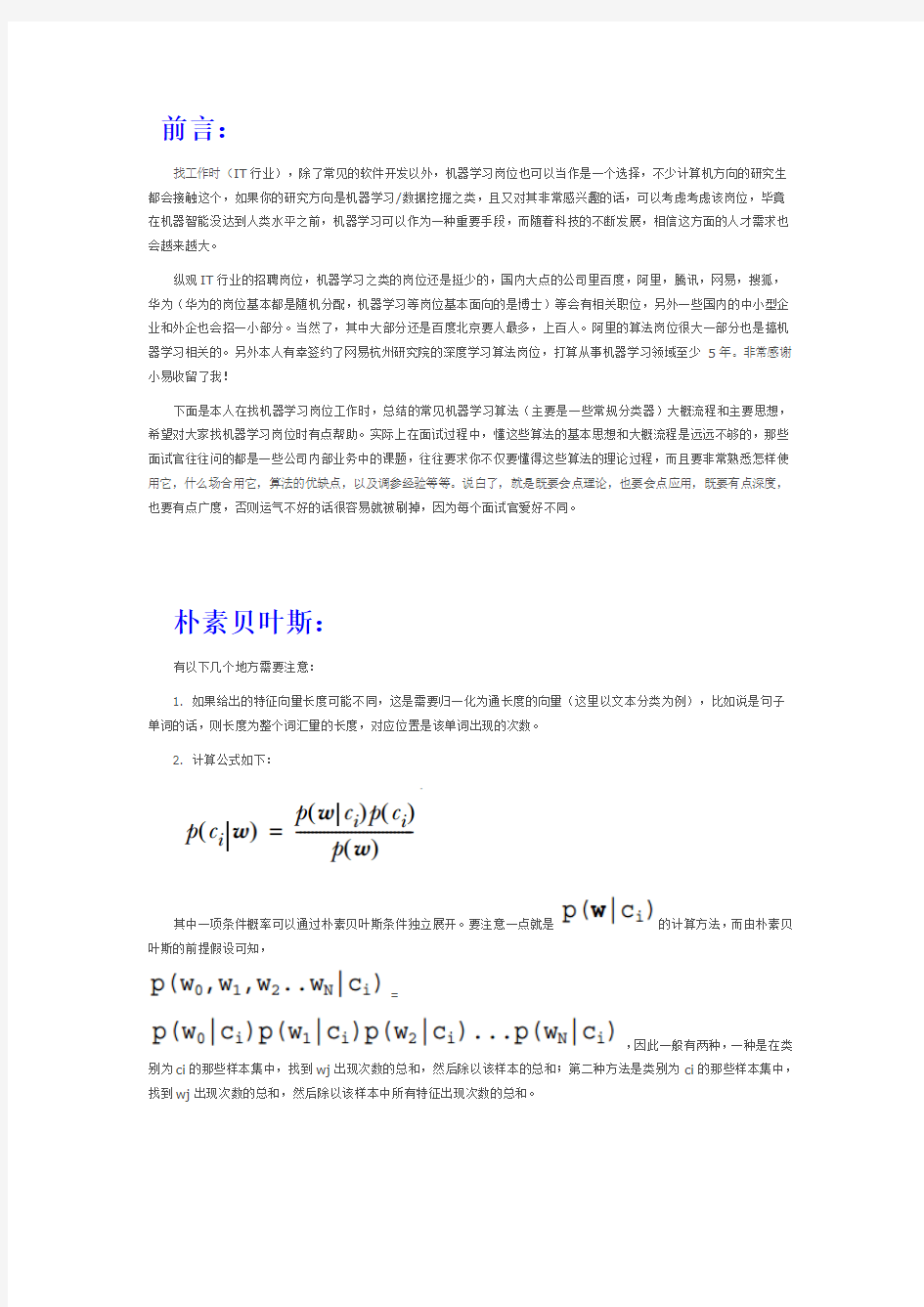
其中一项条件概率可以通过朴素贝叶斯条件独立展开。要注意一点就是的计算方法,而由朴素贝叶斯的前提假设可知,
=
,因此一般有两种,一种是在类别为ci的那些样本集中,找到wj出现次数的总和,然后除以该样本的总和;第二种方法是类别为ci的那些样本集中,找到wj出现次数的总和,然后除以该样本中所有特征出现次数的总和。
3. 如果中的某一项为0,则其联合概率的乘积也可能为0,即2中公式的分子为0,为了避免这种现象出现,一般情况下会将这一项初始化为1,当然为了保证概率相等,分母应对应初始化为2(这里因为是2类,所以加2,如果是k类就需要加k,术语上叫做laplace光滑, 分母加k的原因是使之满足全概率公式)。
朴素贝叶斯的优点:
对小规模的数据表现很好,适合多分类任务,适合增量式训练。
缺点:
对输入数据的表达形式很敏感。
决策树:
决策树中很重要的一点就是选择一个属性进行分枝,因此要注意一下信息增益的计算公式,并深入理解它。
信息熵的计算公式如下:
其中的n代表有n个分类类别(比如假设是2类问题,那么n=2)。分别计算这2类样本在总样本中出现的概率p1和p2,这样就可以计算出未选中属性分枝前的信息熵。
现在选中一个属性xi用来进行分枝,此时分枝规则是:如果xi=vx的话,将样本分到树的一个分支;如果不相等则进入另一个分支。很显然,分支中的样本很有可能包括2个类别,分别计算这2个分支的熵H1和H2,计算出分枝后的总信息熵H’=p1*H1+p2*H2.,则此时的信息增益ΔH=H-H’。以信息增益为原则,把所有的属性都测试一边,选择一个使增益最大的属性作为本次分枝属性。
决策树的优点:
计算量简单,可解释性强,比较适合处理有缺失属性值的样本,能够处理不相关的特征;
缺点:
容易过拟合(后续出现了随机森林,减小了过拟合现象);
Logistic回归:
Logistic是用来分类的,是一种线性分类器,需要注意的地方有:
1. logistic函数表达式为:
其导数形式为:
2. logsitc回归方法主要是用最大似然估计来学习的,所以单个样本的后验概率为:
到整个样本的后验概率:
其中:
通过对数进一步化简为:
3. 其实它的loss function为-l(θ),因此我们需使loss function最小,可采用梯度下降法得到。梯度下降法公式为:
Logistic回归优点:
1、实现简单;
2、分类时计算量非常小,速度很快,存储资源低;
缺点:
1、容易欠拟合,一般准确度不太高
2、只能处理两分类问题(在此基础上衍生出来的softmax可以用于多分类),且必须线性可分;
线性回归:
线性回归才是真正用于回归的,而不像logistic回归是用于分类,其基本思想是用梯度下降法对最小二乘法形式的误差函数进行优化,当然也可以用normal equation直接求得参数的解,结果为:
而在LWLR(局部加权线性回归)中,参数的计算表达式为:
因为此时优化的是:
由此可见LWLR与LR不同,LWLR是一个非参数模型,因为每次进行回归计算都要遍历训练样本至少一次。
线性回归优点:
实现简单,计算简单;
缺点:
不能拟合非线性数据;
KNN算法:
KNN即最近邻算法,其主要过程为:
1. 计算训练样本和测试样本中每个样本点的距离(常见的距离度量有欧式距离,马氏距离等);
2. 对上面所有的距离值进行排序;
3. 选前k个最小距离的样本;
4. 根据这k个样本的标签进行投票,得到最后的分类类别;
如何选择一个最佳的K值,这取决于数据。一般情况下,在分类时较大的K值能够减小噪声的影响。但会使类别之间的界限变得模糊。一个较好的K值可通过各种启发式技术来获取,比如,交叉验证。另外噪声和非相关性特征向量的存在会使K近邻算法的准确性减小。
近邻算法具有较强的一致性结果。随着数据趋于无限,算法保证错误率不会超过贝叶斯算法错误率的两倍。对于一些好的K值,K近邻保证错误率不会超过贝叶斯理论误差率。
注:马氏距离一定要先给出样本集的统计性质,比如均值向量,协方差矩阵等。关于马氏距离的介绍如下:
KNN算法的优点:
1. 思想简单,理论成熟,既可以用来做分类也可以用来做回归;
2. 可用于非线性分类;
3. 训练时间复杂度为O(n);
4. 准确度高,对数据没有假设,对outlier不敏感;
缺点:
1. 计算量大;
2. 样本不平衡问题(即有些类别的样本数量很多,而其它样本的数量很少);
3. 需要大量的内存;
SVM:
要学会如何使用libsvm以及一些参数的调节经验,另外需要理清楚svm算法的一些思路:
1. svm中的最优分类面是对所有样本的几何裕量最大(为什么要选择最大间隔分类器,请从数学角度上说明?网
易深度学习岗位面试过程中有被问到。答案就是几何间隔与样本的误分次数间存在关系:,其中的分母就是样本到分类间隔距离,分子中的R是所有样本中的最长向量值),即:
经过一系列推导可得为优化下面原始目标:
2. 下面来看看拉格朗日理论:
可以将1中的优化目标转换为拉格朗日的形式(通过各种对偶优化,KKD条件),最后目标函数为:
我们只需要最小化上述目标函数,其中的α为原始优化问题中的不等式约束拉格朗日系数。
3. 对2中最后的式子分别w和b求导可得:
由上面第1式子可以知道,如果我们优化出了α,则直接可以求出w了,即模型的参数搞定。而上面第2个式子可以作为后续优化的一个约束条件。
4. 对2中最后一个目标函数用对偶优化理论可以转换为优化下面的目标函数:
而这个函数可以用常用的优化方法求得α,进而求得w和b。
5. 按照道理,svm简单理论应该到此结束。不过还是要补充一点,即在预测时有:
那个尖括号我们可以用核函数代替,这也是svm经常和核函数扯在一起的原因。
6. 最后是关于松弛变量的引入,因此原始的目标优化公式为:
此时对应的对偶优化公式为:
与前面的相比只是α多了个上界。
SVM算法优点:
可用于线性/非线性分类,也可以用于回归;
低泛化误差;
容易解释;
计算复杂度较低;
缺点:
对参数和核函数的选择比较敏感;
原始的SVM只比较擅长处理二分类问题;
Boosting:
主要以Adaboost为例,首先来看看Adaboost的流程图,如下:
从图中可以看到,在训练过程中我们需要训练出多个弱分类器(图中为3个),每个弱分类器是由不同权重的样本(图中为5个训练样本)训练得到(其中第一个弱分类器对应输入样本的权值是一样的),而每个弱分类器对最终分类结果的作用也不同,是通过加权平均输出的,权值见上图中三角形里面的数值。那么这些弱分类器和其对应的权值是怎样训练出来的呢?
下面通过一个例子来简单说明。
书中(machine learning in action)假设的是5个训练样本,每个训练样本的维度为2,在训练第一个分类器时5个样本的权重各为0.2. 注意这里样本的权值和最终训练的弱分类器组对应的权值α是不同的,样本的权重只在训练过程中用到,而α在训练过程和测试过程都有用到。
现在假设弱分类器是带一个节点的简单决策树,该决策树会选择2个属性(假设只有2个属性)的一个,然后计算出这个属性中的最佳值用来分类。
Adaboost的简单版本训练过程如下:
1. 训练第一个分类器,样本的权值D为相同的均值。通过一个弱分类器,得到这5个样本(请对应书中的例子来看,依旧是machine learning in action)的分类预测标签。与给出的样本真实标签对比,就可能出现误差(即错误)。如果某个样本预测错误,则它对应的错误值为该样本的权重,如果分类正确,则错误值为0. 最后累加5个样本的错误率之和,记为ε。
2. 通过ε来计算该弱分类器的权重α,公式如下:
3. 通过α来计算训练下一个弱分类器样本的权重D,如果对应样本分类正确,则减小该样本的权重,公式为:
如果样本分类错误,则增加该样本的权重,公式为:
4. 循环步骤1,2,3来继续训练多个分类器,只是其D值不同而已。
测试过程如下:
输入一个样本到训练好的每个弱分类中,则每个弱分类都对应一个输出标签,然后该标签乘以对应的α,最后求和得到值的符号即为预测标签值。
Boosting算法的优点:
低泛化误差;
容易实现,分类准确率较高,没有太多参数可以调;
缺点:
对outlier比较敏感;
聚类:
根据聚类思想划分:
1. 基于划分的聚类:
K-means, k-medoids(每一个类别中找一个样本点来代表),CLARANS.
k-means是使下面的表达式值最小:
k-means算法的优点:
(1)k-means算法是解决聚类问题的一种经典算法,算法简单、快速。
(2)对处理大数据集,该算法是相对可伸缩的和高效率的,因为它的复杂度大约是O(nkt),其中n是所有对象的数目,k是簇的数目,t是迭代的次数。通常k< (3)算法尝试找出使平方误差函数值最小的k个划分。当簇是密集的、球状或团状的,且簇与簇之间区别明显时,聚类效果较好。 缺点: (1)k-平均方法只有在簇的平均值被定义的情况下才能使用,且对有些分类属性的数据不适合。 (2)要求用户必须事先给出要生成的簇的数目k。 (3)对初值敏感,对于不同的初始值,可能会导致不同的聚类结果。 (4)不适合于发现非凸面形状的簇,或者大小差别很大的簇。 (5)对于"噪声"和孤立点数据敏感,少量的该类数据能够对平均值产生极大影响。 2. 基于层次的聚类: 自底向上的凝聚方法,比如AGNES。 自上向下的分裂方法,比如DIANA。 3. 基于密度的聚类: DBSACN,OPTICS,BIRCH(CF-Tree),CURE. 4. 基于网格的方法: STING, WaveCluster. 5. 基于模型的聚类: EM,SOM,COBWEB. 以上这些算法的简介可参考聚类(百度百科)。 推荐系统: 推荐系统的实现主要分为两个方面:基于内容的实现和协同滤波的实现。 基于内容的实现: 不同人对不同电影的评分这个例子,可以看做是一个普通的回归问题,因此每部电影都需要提前提取出一个特征向量(即x值),然后针对每个用户建模,即每个用户打的分值作为y值,利用这些已有的分值y和电影特征值x就可以训练回归模型了(最常见的就是线性回归)。这样就可以预测那些用户没有评分的电影的分数。(值得注意的是需对每个用户都建立他自己的回归模型) 从另一个角度来看,也可以是先给定每个用户对某种电影的喜好程度(即权值),然后学出每部电影的特征,最后采用回归来预测那些没有被评分的电影。 当然还可以是同时优化得到每个用户对不同类型电影的热爱程度以及每部电影的特征。具体可以参考Ng在coursera上的ml教程:https://https://www.360docs.net/doc/aa16967747.html,/course/ml 基于协同滤波的实现: 协同滤波(CF)可以看做是一个分类问题,也可以看做是矩阵分解问题。协同滤波主要是基于每个人自己的喜好都类似这一特征,它不依赖于个人的基本信息。比如刚刚那个电影评分的例子中,预测那些没有被评分的电影的分数只依赖于已经打分的那些分数,并不需要去学习那些电影的特征。 SVD将矩阵分解为三个矩阵的乘积,公式如下所示: 中间的矩阵sigma为对角矩阵,对角元素的值为Data矩阵的奇异值(注意奇异值和特征值是不同的),且已经从大到小排列好了。即使去掉特征值小的那些特征,依然可以很好的重构出原始矩阵。如下图所示: 其中更深的颜色代表去掉小特征值重构时的三个矩阵。 果m代表商品的个数,n代表用户的个数,则U矩阵的每一行代表商品的属性,现在通过降维U矩阵(取深色部分)后,每一个商品的属性可以用更低的维度表示(假设为k维)。这样当新来一个用户的商品推荐向量X,则可以根据公式X'*U1*inv(S1)得到一个k维的向量,然后在V’中寻找最相似的那一个用户(相似度测量可用余弦公式等),根据这个用户的评分来推荐(主要是推荐新用户未打分的那些商品)。具体例子可以参考网页:SVD在推荐系统中的应用。 另外关于SVD分解后每个矩阵的实际含义可以参考google吴军的《数学之美》一书(不过个人感觉吴军解释UV 两个矩阵时好像弄反了,不知道大家怎样认为)。或者参考machine learning in action其中的svd章节。 pLSA: pLSA由LSA发展过来,而早期LSA的实现主要是通过SVD分解。pLSA的模型图如下: 公式中的意义如下: 具体可以参考2010龙星计划:机器学习中对应的主题模型那一讲 LDA: 主题模型,概率图如下: 和pLSA不同的是LDA中假设了很多先验分布,且一般参数的先验分布都假设为Dirichlet分布,其原因是共轭分布时先验概率和后验概率的形式相同。 GDBT: GBDT(Gradient Boosting Decision Tree) 又叫 MART(Multiple Additive Regression Tree),好像在阿里内部用得比较多(所以阿里算法岗位面试时可能会问到),它是一种迭代的决策树算法,该算法由多棵决策树组成,所有树的输出结果累加起来就是最终答案。它在被提出之初就和SVM一起被认为是泛化能力(generalization)较强的算法。近些年更因为被用于搜索排序的机器学习模型而引起大家关注。 GBDT是回归树,不是分类树。其核心就在于,每一棵树是从之前所有树的残差中来学习的。为了防止过拟合,和Adaboosting一样,也加入了boosting这一项。 关于GDBT的介绍可以可以参考:GBDT(MART)迭代决策树入门教程| 简介。 Regularization: 作用是(网易电话面试时有问到): 1. 数值上更容易求解; 2. 特征数目太大时更稳定; 3. 控制模型的复杂度,光滑性。复杂性越小且越光滑的目标函数泛化能力越强。而加入规则项能使目标函数复杂度减小,且更光滑。 4. 减小参数空间;参数空间越小,复杂度越低。 5. 系数越小,模型越简单,而模型越简单则泛化能力越强(Ng宏观上给出的解释)。 6. 可以看成是权值的高斯先验。 异常检测: 可以估计样本的密度函数,对于新样本直接计算其密度,如果密度值小于某一阈值,则表示该样本异常。而密度函数一般采用多维的高斯分布。如果样本有n维,则每一维的特征都可以看作是符合高斯分布的,即使这些特征可视化出来不太符合高斯分布,也可以对该特征进行数学转换让其看起来像高斯分布,比如说x=log(x+c), x=x^(1/c)等。异常检测的算法流程如下: 其中的ε也是通过交叉验证得到的,也就是说在进行异常检测时,前面的p(x)的学习是用的无监督,后面的参数ε学习是用的有监督。那么为什么不全部使用普通有监督的方法来学习呢(即把它看做是一个普通的二分类问题)?主 要是因为在异常检测中,异常的样本数量非常少而正常样本数量非常多,因此不足以学习到好的异常行为模型的参数,因为后面新来的异常样本可能完全是与训练样本中的模式不同。 另外,上面是将特征的每一维看成是相互独立的高斯分布,其实这样的近似并不是最好的,但是它的计算量较小,因此也常被使用。更好的方法应该是将特征拟合成多维高斯分布,这时有特征之间的相关性,但随之计算量会变复杂,且样本的协方差矩阵还可能出现不可逆的情况(主要在样本数比特征数小,或者样本特征维数之间有线性关系时)。 上面的内容可以参考Ng的https://https://www.360docs.net/doc/aa16967747.html,/course/ml EM算法: 有时候因为样本的产生和隐含变量有关(隐含变量是不能观察的),而求模型的参数时一般采用最大似然估计,由于含有了隐含变量,所以对似然函数参数求导是求不出来的,这时可以采用EM算法来求模型的参数的(对应模型参数个数可能有多个),EM算法一般分为2步: E步:选取一组参数,求出在该参数下隐含变量的条件概率值; M步:结合E步求出的隐含变量条件概率,求出似然函数下界函数(本质上是某个期望函数)的最大值。 重复上面2步直至收敛。 公式如下所示: M步公式中下界函数的推导过程: EM算法一个常见的例子就是GMM模型,每个样本都有可能由k个高斯产生,只不过由每个高斯产生的概率不同而已,因此每个样本都有对应的高斯分布(k个中的某一个),此时的隐含变量就是每个样本对应的某个高斯分布。 GMM的E步公式如下(计算每个样本对应每个高斯的概率): 更具体的计算公式为: M步公式如下(计算每个高斯的比重,均值,方差这3个参数): 关于EM算法可以参考Ng的cs229课程资料或者网易公开课:斯坦福大学公开课:机器学习课程。 Apriori: Apriori是关联分析中比较早的一种方法,主要用来挖掘那些频繁项集合。其思想是: 1. 如果一个项目集合不是频繁集合,那么任何包含它的项目集合也一定不是频繁集合; 2. 如果一个项目集合是频繁集合,那么它的任何非空子集也是频繁集合; Aprioir需要扫描项目表多遍,从一个项目开始扫描,舍去掉那些不是频繁的项目,得到的集合称为L,然后对L 中的每个元素进行自组合,生成比上次扫描多一个项目的集合,该集合称为C,接着又扫描去掉那些非频繁的项目,重复… 看下面这个例子: 元素项目表格: 如果每个步骤不去掉非频繁项目集,则其扫描过程的树形结构如下: 在其中某个过程中,可能出现非频繁的项目集,将其去掉(用阴影表示)为: 上面的内容主要参考的是machine learning in action这本书。 FP Growth: FP Growth是一种比Apriori更高效的频繁项挖掘方法,它只需要扫描项目表2次。其中第1次扫描获得当个项目的频率,去掉不符合支持度要求的项,并对剩下的项排序。第2遍扫描是建立一颗FP-Tree(frequent-patten tree)。 接下来的工作就是在FP-Tree上进行挖掘。 比如说有下表: 它所对应的FP_Tree如下: 然后从频率最小的单项P开始,找出P的条件模式基,用构造FP_Tree同样的方法来构造P的条件模式基的FP_Tree,在这棵树上找出包含P的频繁项集。 依次从m,b,a,c,f的条件模式基上挖掘频繁项集,有些项需要递归的去挖掘,比较麻烦,比如m节点,具体的过程可以参考博客:Frequent Pattern 挖掘之二(FP Growth算法),里面讲得很详细。 文件编号:TP-AR-L3207 In Terms Of Organization Management, It Is Necessary To Form A Certain Guiding And Planning Executable Plan, So As To Help Decision-Makers To Carry Out Better Production And Management From Multiple Perspectives. (示范文本) 编订:_______________ 审核:_______________ 单位:_______________ 起重机械基础常识(正式 版) 起重机械基础常识(正式版) 使用注意:该安全管理资料可用在组织/机构/单位管理上,形成一定的具有指导性,规划性的可执行计划,从而实现多角度地帮助决策人员进行更好的生产与管理。材料内容可根据实际情况作相应修改,请在使用时认真阅读。 一、起重机械的工作特点及其分类 起重机械是以间歇工作方式,升降物件或提升并 在限定范围内运移物件的。 起重机械是现代工业生产不可缺少的设备,被广 泛的应用于各种物料的起重、运输、装卸和人员输送 等作业中。全国起重机械的保有量约25万台左右。 全国有起重机生产厂400多家,年产量约3万余台, 并以每年10%速度递增。 由于大多数起重机械活动空间大,暴露的活动零 部件多,使得事故隐患面积大;作业场所常常需要多 人配合,要求指挥、捆扎、驾驶等作业人员配合,存 在较大的难度。上述诸多因素的存在,决定了起重机伤害事故较多。据资料统计,我国每年起重伤害事故的死亡人数,占全部工业企业死亡总数的15%左右,每年起重机事故的死亡人数在所有机械事故死亡人数中居首位。在各类起重机械中,塔吊事故最为突出,据笔者在劳动部职安局工作时统计,全国塔吊在安装和拆卸中,死亡10人以上的特大事故,每年都要发生3起以上。因此,起重机械安全不能不引起人们的重视。 起重机械按其功能和结构特点,可分为三类:第一类:轻小型起重设备,其特点是轻便,机构紧凑,动作简单,作业范围投影以点、线为主;第二类:起重机,其特点是可以使挂在起重吊钩或其他取物装置上的重物在空间实现垂直升降和水平运移;第三类:升降机,其特点是重物或取物装置只能沿导轨升降。 python深度学习基础教程下载 Python逐渐成为新的流行,成为开发主流语言。目前国内python人才需求呈大规模上升,薪资水平也水涨船高。已经收起了游戏,收起了玩心,万事俱备只欠视频?这里就有成套的完整的python深度学习基础教程。 python基础教程:https://www.360docs.net/doc/aa16967747.html,/s/1qYTZiNE python课程教学高手晋级视频总目录: https://www.360docs.net/doc/aa16967747.html,/s/1hrXwY8k python课程windows知识点:https://www.360docs.net/doc/aa16967747.html,/s/1kVcaH3x python课程linux知识点:https://www.360docs.net/doc/aa16967747.html,/s/1i4VZh5b python课程web知识点:https://www.360docs.net/doc/aa16967747.html,/s/1jIMdU2i python课程机器学习:https://www.360docs.net/doc/aa16967747.html,/s/1o8qNB8Q python课程-树莓派设备:https://www.360docs.net/doc/aa16967747.html,/s/1slFee2T 大部分Python开发者从事以下三种开发:Web开发(38%)、通用开发(22%)、科学类开发和数据分析(21%)。这和其他一些独立研究的结果相吻合,揭示了这么一个事实:科学类的Python开发者数量正在稳步增长。 Python常被称为胶水语言,有着强大的包装能力、可组合性、可嵌入性,能够把用其他语言制作的各种复杂模块(尤其是C/C++)包装在Python 模块里,只露出漂亮的接口。 Python处理数据简洁强悍,成为数据分析和AI的第一语言,网络攻防的第一黑客语言,云计算系统管理第一语言,编程入门的首选语言。另外,有趣的是,16%的开发者将PHP视为他们的第二语言,Python 作为主要语言。 如果你对Python学习感兴趣,建议来千锋Python。千锋有最严格、最科学、最负责的教学就业管理制度,班主任、职业规划师全程跟班,把握每位Python学员的学习状态,并有专业的职业素养课和就业指导课,保证教学及 就业质量。 而且千锋是业内唯一一家敢推出“两周免费试听,不满意不缴费”政策的Python学习机构,让学员更真实地了解千锋、了解自己是否适合做开发,千锋增加了人工智能和数据分析等内容的Python全栈课程随时欢迎你前来试学! 2018年硕士学位研究生招生考试业务课考试大纲 考试科目:机械设计基础 一、机械原理部分 1.平面机构的结构分析 构件、运动副及机构的概念;机构具有确定运动的条件和机构自由度的计算;平面机构的高副低代方法和Ⅱ级、Ⅲ级杆组的结构特点,平面机构的组成原理和结构分析方法。 2.平面机构的速度分析 速度瞬心的概念;机构速度瞬心的数目和瞬心位置的确定方法;速度瞬心法在机构速度分析中的应用。 3.平面连杆机构及其设计 平面四杆机构的基本型式及其演化;平面四杆机构的主要工作特性(平面四杆机构有曲柄的条件,急回运动、行程速度变化系数及极位夹角,压力角和传动角,死点位置);平面四杆机构设计图解法。 4.凸轮机构及其设计 凸轮机构的类型和特点;凸轮机构从动件的常用运动规律及其特性;凸轮机构偏心、凸轮基圆、推程运动角、远休止角、回程运动角、近休止角、理论轮廓与实际轮廓、从动件行程及机构压力角等概念,并能在图中标出;了解直动从动件盘形凸轮机构正配置、负配置对压力角的影响;理解基圆半径与压力角的定性影响关系;掌握按给定运动规律设计各类盘形凸轮轮廓曲线,重点是图解法;凸轮机构基本尺寸确定的原则(压力角、基圆半径和滚子半径)。 5.齿轮机构及其设计 齿轮机构的类型;齿廓啮合基本定律;渐开线的性质及渐开线齿廓的特点;渐开线标准直齿圆柱齿轮的基本参数及几何尺寸计算;渐开线标准直齿圆柱齿轮啮合传动应满足的条件(正确啮合的条件、无侧隙啮合条件及标准安装、连续传动的条件);渐开线齿轮的切齿原理、根切现象及最少齿数;平行轴斜齿圆柱齿轮机构(啮合特点、斜齿轮的基本参数、几何尺寸计算和当量齿数、斜齿轮传动的正确啮合条件和传动特点)。 6.轮系及其设计 定轴轮系、周转轮系和复合轮系传动比的计算方法。 7.其他常用机构 棘轮机构、槽轮机构和不完全齿轮机构的组成、工作原理及运动特点。 8.刚性回转件的平衡 刚性回转件的静平衡与动平衡的原理和计算方法。 9.机械速度波动的调节 机械速度波动的基本知识及其调节方法。 8.回转件的平衡 邓灿 (机械设计制造及其自动化六班) 摘要:机械设计是机械工程的重要组成部分,机器的设计阶段是决定机器好坏的关键。自古至今,新的设计理论和方法不断形成,最大程度地满足了社会和人们的需要。本文阐述了机械设计理论与方法的历史变演、发展现状以及未来趋势,提出了继承与创新相结合的重要性。 关键词:机械设计理论方法发展 邓灿 (机械设计制造及其自动化六班) 摘要:机械设计是机械工程的重要组成部分,机器的设计阶段是决定机器好坏的关键。自古至今,新的设计理论和方法不断形成,最大程度地满足了社会和人们的需要。本文阐述了机械设计理论与方法的历史变演、发展现状以及未来趋势,提出了继承与创新相结合的重要性。 关键词:机械设计理论方法发展 0 前言 为了满足机器的使用功能要求、经济性要求以及劳动保护和环境保护要求等,设计人员必须有一个科学的设计过程。机械设计是对机械的工作原理、结构、运动方式、力和能量的传递方式、各个零件的材料和形状尺寸、润滑方法等进行构思、分析和计算,并将其转化为具体的描述以人为制造依据的工作过程。自机械学科开创以来,设计学领域就占据着非常重要的位置,在不同的阶段它都有一套完整的理论和方法,进过积累和创新,不断闪现出新的亮点,最大程度地满足社会和人们对产品的需求。下面介绍了机械设计理论与方法的历史进程、研究现状,通过调研、分析和总结对未来的发展趋势做出了展望。 1 历史回顾 机械设计是为生产机械所必须进行的技术决策活动,由于基础薄弱、积累的经验少等原因,这门学科的确立相对较晚。按照机械界的说法,20世纪60年代以前的机械设计理论与方法称为传统机械设计,其理论与方法都是根据常规的思路和步骤,目前我们所使用的《机械原理》及《机械设计》等教材主要讲述的是常规设计技术,虽然比之现代设计技术它存在着明显的局限性,但是它是学习、应用发展现代设计技术的基础,它的经典性是每一个机械设计人员所不敢轻视和忽略的。 1.1传统机械设计的经典理论 (1)理论基础 机械设计需要观念指导,传统的设计方法能适应和满足当时人们的要求,则必然存在一套公认的理论。这套理论的基础有两点: 1)、静态解析和稳定性解析的观念; 在传统设计理论形成时期,牛顿力学的思维方式总是将处于变动状态之中的事物,抽象为处于相对稳定状态(包括静态)之中来描述;再加之受当时的实验和模拟技术水平的限制,所以就把复杂状态的问题采取近似的、粗略的简化处理,以便进行实验模拟和数值处理。 2)、合格设计的观念 传统的机械设计着重于实现机械本身预定的功能,最大程度地满足机器的工作能力,而对工艺和成本等考虑得较少。整个设计往往是根据任务和目标,先做出第一个方案,甚至造出样机,然后通过评定与考核,进行修改,形成第二轮方案,如此反复,直到满意为止。 (2)概念体系 针对这个理论基础,传统的设计论还建立了自己的经典概念,从而形成了静态解析的理论体系。其概念的建立,大致有两种模式: 1)将客观的变动状态抽象为稳定状态 或静态,进而建立概念,如“载荷” 的概念; 2)对具有随机性的现象,略去其分散 趋势的统计特征,仅只抓住集中趋 势的统计特征来建立概念,如“应 力”概念和“强度”的概念。 (3)设计准则 塔式起重机基础知识汇总 塔式起重机的技术性能是用各种参数表示的,其主要参数包括幅度、起重量、起重力矩、自由高度、最大高度等;其一般参数包括:各种速度、结构重量、尺寸、尾部尺寸及轨距轴距等,下面分别简述: 一、幅度: 幅度是从塔式起重机回转中心线至吊钩中心线的水平距离,通常称为回转半径式工作半径。 二、起重量 起重量是吊钩能吊起的重量,其中包括吊索、吊具及容器的重量,起重量因幅度的改变而改变,因此每台起重机都有自己本身的起重量与起重幅度的对应表,俗称工作曲线表。 起重量包括两个参数:即最大起重量及最大幅度起重量。 最大起重量由起重机的设计结构确定,主要包括其钢丝绳、吊钩、臂架、起重机构等。其吊点必须在幅度较小的位置。 最大幅度起重量除了与起重机设计结构有关,还与其倾翻力矩有关,是一个很重要的参数。 塔式起重机的起重量是随吊钩的滑轮组数不同而不同。一般两绳是单绳起重量的一倍,四绳是两绳起重量的一倍等等。可根据需要而进行变换。 为了防止塔式起重机起重超过其最大起重量,所有塔式起重机都安装有重量限制器,有的称测力环,重量限制器内装存有多个限制开关,除了限位塔机最大额定重量外,在高速起吊和中速起吊时,也可进行重量限制,高速时吊重最轻,中速时吊重中等,低速时吊重最重。. 三、起重力矩 起重量与相应幅度的乘积为起重力矩,过去的计量单位为TM,现行的计量单位为KNM,1TM等于10KNM。 额定起重力矩量是塔式起重机工作能力的最重要参数,它是防止塔机工作时重心偏移,而发生倾翻的关键参数。由于不同的幅度的起重力矩不均衡,幅度渐大,力矩渐小,因此常以各点幅度的平均力矩作为塔机的额定力矩。 塔式起重机的起重量随着幅度的增加而相应递减,因此,在各种幅度时都有额定的起重量,不同的幅度和相应的起重量连接起来,就绘制成起重机的性能曲线图,使操作人员一看明了不同幅度下的额定起重量,防止超载。 一般塔式起重机可以安装几种不同的臂长,每一种臂长的起重臂都有其特定的起重曲线,不过差别不大。 为了防止塔机工作时超力矩而发生安全事故,所有塔机都安装了力矩限位器,其工作原理是当力矩增大时,塔尖的主肢结构会发生弹性形变而触发限位开关动作,力矩 机械设计模拟题 一、填空题(每小题2分,共20分) 1、机械零件的设计方法有理论设计经验设计模型试验设计。 2、机器的基本组成要素是机械零件。 3、机械零件常用的材料有金属材料高分子材料陶瓷材料复合材料。 4、按工作原理的不同联接可分为形锁合连接摩擦锁合链接材料锁合连接。 5、联接按其可拆性可分为可拆连接和不可拆连接。 6、可拆联接是指不需破坏链接中的任一零件就可拆开的连接。 7、根据牙型螺纹可分为普通螺纹、管螺纹、梯形螺纹、矩形螺纹、锯齿形螺纹。 8、螺纹大径是指与螺纹牙顶相切的假想圆柱的直径,在标准中被定为公称直径。 9、螺纹小径是指螺纹最小直径,即与螺纹牙底相切的假想的圆柱直径。 10、螺纹的螺距是指螺纹相邻两牙的中径线上对应两点间的轴向距离。 11、导程是指同一条螺纹线上的相邻两牙在中径线上对应两点间的轴线距离。 12、螺纹联接的基本类型有螺栓连接双头螺栓连接螺钉连接紧定螺钉连接。 13、控制预紧力的方法通常是借助测力矩扳手或定力矩扳手,利用控制拧紧力矩的方法来控制预紧力的大小。 14、螺纹预紧力过大会导致整个链接的结构尺寸增大,也会使连接件在装配或偶然过载时被拉断。 15、螺纹防松的方法,按其工作原理可分为摩擦防松、机械防松、破坏螺旋运动关系防松。 16、对于重要的螺纹联接,一般采用机械防松。 17、受横向载荷的螺栓组联接中,单个螺栓的预紧力F?为。 18、键联接的主要类型有平键连接半圆键连接楔键连接切向键连接。 19、键的高度和宽度是由轴的直径决定的。 20、销按用途的不同可分为定位销连接销安全销。 21、无键联接是指轴与毂的连接不用键或花键连接。 22、联轴器所连两轴的相对位移有轴向位移径向位移角位移综合位移。 23、按离合器的不同工作原理,离合器可分为牙嵌式和摩擦式。 24、按承受载荷的不同,轴可分为转轴心轴传动轴。 安全管理编号:LX-FS-A36316 起重机械基础常识 In the daily work environment, plan the important work to be done in the future, and require the personnel to jointly abide by the corresponding procedures and code of conduct, so that the overall behavior or activity reaches the specified standard 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑 起重机械基础常识 使用说明:本安全管理资料适用于日常工作环境中对安全相关工作进行具有统筹性,导向性的规划,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 一、起重机械的工作特点及其分类 起重机械是以间歇工作方式,升降物件或提升并在限定范围内运移物件的。 起重机械是现代工业生产不可缺少的设备,被广泛的应用于各种物料的起重、运输、装卸和人员输送等作业中。全国起重机械的保有量约25万台左右。全国有起重机生产厂400多家,年产量约3万余台,并以每年10%速度递增。 由于大多数起重机械活动空间大,暴露的活动零部件多,使得事故隐患面积大;作业场所常常需要多人配合,要求指挥、捆扎、驾驶等作业人员配合,存 机械制图课程教学大纲文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256) 青岛胶南珠山职业学校 《机械制图》教学大纲 课程名称:机械制图课程类型: 技术基础课适用专业:机电、汽修主撰人:刘巧玲 一、课程性质、目的和任务 《机械制图》课程是一门必修的技术基础课,同时又是一门培养学生空间思维和设计创造能力的专业基础课程。机械图样是表达和交流技术思想的重要工具,是工程技术部门的一项重要技术文件。本课程研究绘制和阅读机械图样的基本原理和基本方法,培养学生的制图能力、空间思维能力、构形设计能力和计算机设计绘图能力,并能学习、贯彻机械制图国家标准和有关规定。 通过本课程的学习,使学生在手工机械制图与计算机绘图方面达到以下基本要求: 1. 理解并掌握正投影的基本原理和作图方法; 2. 理解并掌握截交线和相贯线的画法; 3. 掌握常用件和标准件的规定画法、标记及有关标准表格的查用; 4. 掌握公差与配合的选用及标注法,能用公差标准、手册等正确标注零件图和装配图; 5.了解中等复杂程度机械零件和装配图的识读。 二、课程的基本要求 通过本课程的学习,学生应达到的理论水平和所具备的实践动手能力。 1.通过学习制图基本知识与技能,应熟悉国家标准《机械制图》的基本规定,学会正确使用绘图工具和仪器的方法,掌握绘图的基本技能、绘制出准确、图线分明、字体工整、图面整洁的图样。初步掌握徒手绘制草图的技能。 2.正投影法基本原理是识读和绘制机械图样的理论基础,是本课程的核心内容。通过学习正投影作图基础、组合体及其尺寸标注,应掌握运用正投影法表达空间形体的图示方法,并具备一定的空间想象和思维能力。 3.能阅读和绘制中等以上复杂的零件图和装配图。 4.能遵守《技术制图》《机械制图》国家标准的有关规定,会查阅有关图样涉及的标准结构、标准件以及《尺寸公差》等国家标准。 三、学时分配 第1章制图的基本知识与技能(10学时) (一)教学目标 能正确使用绘图工具和仪器,掌握平面图形画法的尺寸分析、线段分析。(二)教学重点 国家标准的一般规定。平面图形的尺寸标注及线段分析。 (三)教学内容 1国家标准?机械制图?的基本规定。 2.绘图工具和绘图方法。 3.几何作图。 第2章点、直线、平面的投影(14学时) (一)教学目标 掌握三视图的等量关系和方位关系,充分理解点、线、面的三面投影规律并会应用投影规律解决相关问题。 (二)教学重点 三视图的形成及投影规律;点、直线、平面的三面投影规律及应用。 《机器学习》课程教学大纲 课程中文名称:机器学习 课程英文名称:Machine Learning 适用专业:计算机应用技术,管理科学与工程 总学时:36 (讲课:28 ,实验:8 )学分:2 大纲撰写人:大纲审核人: 编写日期: 一、课程性质及教学目的: 本课程是面向计算机与信息工程学院研究生开设的专业基础课。其教学重点是使学生掌握常见机器学习算法,包括算法的主要思想和基本步骤,并通过编程练习和典型应用实例加深了解;同时对机器学习的一般理论,如假设空间、采样理论、计算学习理论,以及无监督学习和强化学习有所了解。 二、对选课学生的要求: 要求选课学生事先受过基本编程训练,熟悉C/C++或Matlab编程语言,具有多元微积分、高等代数和概率统计方面基本知识。 三、课程教学内容和要求(200字左右的概述,然后给出各“章”“节”目录及内容简介) 1.决策论与信息论基础: a)损失函数、错分率的最小化、期望损失的最小化等 b)相对熵、互信息 2.概率分布: a)高斯分布、混合高斯分布、Dirichlet分布、beta分布等 b)指数分布族:最大似然估计、充分统计量、共轭先验、无信息先验等 c)非参数方法:核密度估计、近邻法 3.回归的线性模型: a)线性基函数模型 b)贝叶斯线性回归 c)贝叶斯模型比较 4.分类的线性模型: a)判别函数:二分类和多分类的Fisher线性判别 b)概率生成模型:连续输入、离散特征 5.核方法: a)对偶表示 b)构造核函数 c)径向基函数网络:Nadaraya-Watson模型 d)高斯过程:高斯过程模型用于回归和分类、Laplace逼近、与神经网络的联系 6.支持向量机: a)最大边缘分类器:历史回顾 b)用于多分类和回归的支持向量机:几何背景、各种变种 c)统计学习理论简介:Vapnik等人的工作 7.图模型: a)贝叶斯网络 b)Markov随机场:条件独立、因子分解 c)图模型中的推断 8.混合模型和期望最大化(Expectation Maximization,EM)算法(3学时): a)高斯混合模型的参数估计:最大似然估计、EM算法 b)EM一般算法及其应用:贝叶斯线性回归 9.隐Markov模型和条件随机场模型(3学时): a)隐Markov模型:向前-向后算法、Viterbi算法、Baum-Welch算法等 b)条件随机场及其应用 四、课程教学环节的学时安排和基本要求 1.决策论与信息论基础(2学时):了解并掌握统计决策理论和信息论的基础知识。 2.概率分布(3学时):熟悉常见的分布,熟练掌握最大似然估计方法,学会利用无信息先 验和共轭先验简化计算,了解一些常用的非参数方法。 3.回归的线性模型(3学时):掌握线性回归的一般方法,学会使用R中有关回归的程序 包,并能将之用于解决实际问题。 4.分类的线性模型(3学时):对分类问题有一个全面的了解,掌握一些常用的分类方法。 5.核方法(3学时):了解核方法的最新进展,熟练掌握核函数参数估计的常用方法。 6.支持向量机(4学时):掌握支持向量机的基本原理,面对各自研究领域中的具体问题学 会使用支持向量机,粗略了解统计学习理论。 7.图模型(4学时):从建模到算法实现。 8.混合模型和期望最大化(Expectation Maximization,EM)算法(3学时):掌握EM算 法的基本理论,学会使用EM算法。 9.隐Markov模型和条件随机场模型(3学时):掌握隐Markov模型的几个经典算法,学 会利用隐Markov模型和条件随机场模型解决具体问题,如自然语言处理中的词性标注等。 五、教材及参考文献: 1.Bishop, C. M. (2006) Pattern Recognition and Machine Learning, Spring Science + Business Media, LLC 2.Mitchell, T. M. (1997) Machine Learning, The McGraw-Hill Companies, Inc. 六、必要的说明 机械设计制造及其自动化专业培养方案 一、培养目标 本专业立足于国家及地方经济建设和行业发展的需要,培养基础宽厚、实践动手能力强、综合素质高、视野开阔、具有创新精神和社会责任感的应用型高级专门人才;使学生在机械工程相关领域内,具有运行管理、应用研究、设计制造、科技开发和经营销售等方面的能力。学生毕业后主要在公路、铁路、港口、市政、建筑、制造企业等部门生产第一线从事机械设备的管理、运用、控制、设计、机械化施工、产品研发等工作。 二、专业特色及实现途径 (一)专业特色 本专业为国家管理专业和湖南省特色专业,依托的“机械工程”学科为湖南省“十二五”重点建设学科,学校具有“机械工程”一级学科硕士学位授予权和“工程车辆 轻量化与可靠性技术”湖南省高校重点实验室。本专业已形成一支学术水平高、教学科研能 力强、知识与年龄结构合理、教学科研经验丰富的师资队伍,教师中大多数具有机械设计制造企业工作经历。本专业依托行业优势,设置工程机械、机电一体化两个专业方向,以创新实践能力培养为重点,不断优化专业结构,提高人才的培养质量。几十年来,已培养了近三千名本科生,形成了“立足交通和工程机械行业,传承‘铺路石’精神;夯实基础知识,突出机电一体化;强化工程实践与动手能力,培养面向基层的高级应用型人才”的专业特色。(二)实现途径 1、坚持“立足交通和工程机械行业,服务基层”的人才培养理念 50多年的办学历史,数千名毕业生工作在公路建设施工或工程机械行业的第一线,传承脚踏实地、艰苦奋斗、乐于奉献、锐意进取的“铺路石”精神,获得了社会的广泛认可。毕业生就业主要在路桥、水利、港航等交通施工企业及三一重工、中联重科、柳工等工程机械制造企业。因此,本专业在人才培养目标定位上,始终以“紧密依托交通行业,面向基层,服务区域经济发展”为宗旨,坚持将我校的“铺路石”精神融入到人才培养的各个环节,培育、磨练和培养学生“下得去、用得上、干得好、留得住”的思想品质。 2、更新教学理念,改革教学方法,优化课程体系和教学内容,注重基础知识教育 长期以来,本专业积极开展教育教学创新,不断更新教学理念,与产业、行业专家共同研究、完善与生产实践、社会发展需要相适应的宽口径、厚基础、重实践的课程体系。坚持工程机械的特色专业方向,学科优势贯穿于课堂教学和创新实践中,将典型的科研成果凝练 建筑起重机械安全知识试卷 单位:姓名: 一、判断题(每题4分,共计20分。正确“√”错误“×”,并填入括号内) 1.安装、拆卸施工起重机械和整体提升脚手架、模板等自升式架设设施,应当编制拆装方案、制定安全施工措施,并由监理人员现场监督。() 2.施工现场的安全防护用具、机械设备、施工机具及配件必须由专人管理,定期进行检查、维修和保养,建立相应的资料档案,并按照国家有关规定及时报废。() 3.塔式起重机安装质量检验中保证项目有一项不合格,可以判定为合格。() 4.违反《建设工程安全生产管理条例》的规定,施工单位使用未经验收或者验收不合格的施工起重机械和整体提升脚手架、模板等自升式架设设施的,责令限期改正;逾期未改正的,责令停业整顿,并处10万元以上30万元以下的罚款;情况严重的,降低资质等级,直至吊销资质证书;造成重大安全事故,构成犯罪的,对直接责任人员,依照刑法有关规定追究刑事责任;造成损失的,依法承担赔偿责任。() 5.施工单位采购、租赁的安全防护用具、机械设备、施工机具及配件,应当在进入施工现场后进行查验其生产(制造)许可证、产品合格证。() 二、单项选择题(每题4分,共计40分) 1.出租的机械设备和施工机具及配件,应当具有()。 A.生产(制造)许可证 B.产品合格证 C.生产(制造)许可证、产品合格证 2.()应当对出租的机械设备和施工机具及配件的安全性能进行检测,在签订租赁协议时,应当出具检测合格证明。 A.出租单位 B.建设单位 C.施工单位 3.施工单位在使用施工起重机械和整体提升脚手架、模板等自升式架设设施前,应当组织有关单位进行验收,也可以委托具有相应资质的检验检测机构进行验收;使用承租的机械设备和施工机具及配件的,由施工()验收。验收合格的方可使用。 A.总承包单位和安装单位 B.总承包单位、分包单位、出租单位和安装单位共同进行 C.出租单位和安装单位 4.施工单位应当自施工起重机械和整体提升架、模板等自升式架设设施验收合格之日起()日内,向建设行政主管部门或者其他有关部门登记。登记标志应当置于或者附着于该设备的显著位置。 A.15 B.30 C.10 5.违反《建设工程安全生产管理条例》的规定,为建设工程提供机械设备和配件的单位,未按照安全施工的要求配备齐全有效的保险、限位等安全设施和装置的,责令限期改正,处合同价款()以下的罚款;造成损失的,依法承担赔偿责任。 A.3倍以上5倍 B.1倍以上3倍 C.5倍以上10倍 6.违反《建设工程安全生产管理条例》的规定,出租单位出租未经安全性能检测或者经检测不合格的机械设备和施工机具及配件的,责令停业整顿,并处()的罚款;造成损失的,依法承担赔偿责任。 A.1万元以上5万元以上 B.5万元以上10万元以上 C.10万元以上20万元以上 7.施工升降机限速器应隔()校验一次。 A.半年 B.一年 C.两年 D.不需交验 摘要 本笔记是针对斯坦福大学2014年机器学习课程 视频做的个人笔记 黄海广 haiguang2000@https://www.360docs.net/doc/aa16967747.html, qq群:554839127 斯坦福大学2014机器学习教程中文笔记 课程概述 Machine Learning(机器学习)是研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。它是人工智能的核心,是使计算机具有智能的根本途径,其应用遍及人工智能的各个领域,它主要使用归纳、综合而不是演译。在过去的十年中,机器学习帮助我们自动驾驶汽车,有效的语音识别,有效的网络搜索,并极大地提高了人类基因组的认识。机器学习是当今非常普遍,你可能会使用这一天几十倍而不自知。很多研究者也认为这是最好的人工智能的取得方式。在本课中,您将学习最有效的机器学习技术,并获得实践,让它们为自己的工作。更重要的是,你会不仅得到理论基础的学习,而且获得那些需要快速和强大的应用技术解决问题的实用技术。最后,你会学到一些硅谷利用机器学习和人工智能的最佳实践创新。 本课程提供了一个广泛的介绍机器学习、数据挖掘、统计模式识别的课程。主题包括:(一)监督学习(参数/非参数算法,支持向量机,核函数,神经网络)。(二)无监督学习(聚类,降维,推荐系统,深入学习推荐)。(三)在机器学习的最佳实践(偏差/方差理论;在机器学习和人工智能创新过程)。本课程还将使用大量的案例研究,您还将学习如何运用学习算法构建智能机器人(感知,控制),文本的理解(Web搜索,反垃圾邮件),计算机视觉,医疗信息,音频,数据挖掘,和其他领域。 本课程需要10周共18节课,相对以前的机器学习视频,这个视频更加清晰,而且每课都有ppt课件,推荐学习。 本人是中国海洋大学2014级博士生,2014年刚开始接触机器学习,我下载了这次课程的所有视频和课件给大家分享。中英文字幕来自于https://https://www.360docs.net/doc/aa16967747.html,/course/ml,主要是教育无边界字幕组翻译,本人把中英文字幕进行合并,并翻译剩余字幕,对视频进行封装,归类,并翻译了课程目录,做好课程索引文件,希望对大家有所帮助。部分视频中文字幕由中国海洋大学的博士生翻译。视频已经翻译完毕,如果下载了视频,可以直接在文档中打开视频,内嵌中英文字幕,推荐使用potplayer。 这篇中文笔记,主要是根据视频内容和中文字幕以及ppt来制作,部分来源于网络,如“小小人_V”的笔记,并持续更新。 视频下载链接:https://www.360docs.net/doc/aa16967747.html,/s/1pKLATJl 密码:xn4w 本人水平有限,如有公式、算法错误,请及时指出,发邮件给我,也可以加我qq。 今日发现这个笔记被下载超过3万次,应该说这个笔记有点用,我发现以前一些翻译小 ( 安全管理 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 2020年起重机械安全常识 Safety management is an important part of production management. Safety and production are in the implementation process 2020年起重机械安全常识 一、起重机械分类 1.起重机械、起重机 起重机械是被广泛地应用于各种物料的起重、运输、装卸、安装和人员输送等作业中现代工业生产不可缺少的设备。 起重机是以间歇、重复的工作方式,通过起重吊钩或其它吊具起升、下降,或升降与运移物料的机械设备。 2.起重机械分类(略) 3.起重机械的主要参数 额定起重量Gn、跨度S、幅度L、起升高度H、运行速度V、起重力矩M、轨距k、基距B、轮压p、工作级别等。 4.起重机构造标准用语 (1).钢结构:主梁、端梁(横梁)、小车架、支腿、下横梁、起重臂、平衡臂、立柱、门架、拉杆、塔身、走台和司机室等。 (2).传动机构:起升机构、运行机构、回转机构、变幅机构和顶升机构等。 (3).电气系统:手持控制器、主令控制器、导电装置、电缆卷筒、电阻箱、变频器和控制柜等。 (4).主要零部件:吊钧、抓斗、起重电磁铁、钢丝绳、环链、滑轮、卷筒、制动器、车轮和轨道等。 5.起重机安全装置 上升高度限位器、运行极限限位器、缓冲器、锚定装置、夹轨器或防风铁鞋、安全钧、防后倾装置、起重量限制器、力矩限制器和防碰撞装置等。 二.起重机械工作特点及存在危险因素 1.起重机械通常具在庞大的结构和比较复杂的机构,作业过程中常常是几个不同方向的运动同时操作,技术难度较大。 2.能吊运的重物多种多样,载荷是变化的。有的重物重达上百吨,体积大且不规则,还有散粒、热融和易燃易爆危险品等,使吊运过程复杂而危险。 人工智能视频教程全集 人工智能目前在计算机领域内,得到了重视。并在机器人,经济政治决策,控制系统,仿真系统中得到应用:机器视觉:指纹识别,人脸识别,视网膜识别,虹膜识别,掌纹识别,专家系统等。人工智能视频教程全集分享给大家。 千锋python课程教学高手晋级视频总目录 https://https://www.360docs.net/doc/aa16967747.html,/s/1htJW4KG python课程windows知识点https://https://www.360docs.net/doc/aa16967747.html,/s/1eSXr7JO python课程linux知识点https://https://www.360docs.net/doc/aa16967747.html,/s/1mkoW2Ac python课程web知识点:https://www.360docs.net/doc/aa16967747.html,/s/1jIMdU2i python课程机器学习https://https://www.360docs.net/doc/aa16967747.html,/s/1eUaV8iA 只要你认真,哪怕你是还没毕业的大学生,或者是初入职场的工程师,都可以通过自学的方式掌握机器学习科学家的基础技能,并在论文、工作甚至日常生活中快速应用。当然,前提是你有足够的自制力。 人工智能(Artificial Intelligence)是研究解释和模拟人类智能、智能行为及 其规律的一门学科。其主要任务是建立智能信息处理理论,进而设计可以展现某些近似于人类智能行为的计算系统。 AI作为计算机科学的一个重要分支和计算机应用的一个广阔的新领域,它同原子能技术,空间技术一起被称为20世纪三大尖端科技。 如果你没有足够的自制力,建议你还是选择参加人工智能培训。因为只有系统完善的人工智能课程,才能让你未来的人工智能之路走得更平坦、更顺畅。否则,如果半途而废就非常可惜了。 在人工智能培训越来越流行的今天,各种机构如雨后春笋般层出不穷。不同培训机构之间的水平不一致,质量参差不齐。所以我们需要擦亮双眼,甄别相关机构的权威性和专业性,这样才能在入学前,就保证自己获得了正确的指导,并走向正确的道路,让自己的人生,赢在起跑线上。 千锋人工智能讲师呵护陪伴学员,早晨8点到晚上10点,讲师全天在班;8年来,我们坚持纯面授教学,保证学员的学习质量;免费为学员提供学习使用的电脑以及开发服务器,讲师全部是具有多年实战开发经验的研发精英、技术骨 转载]机器学习的经典教程(不断更新中) (2014-07-15 16:29:34) 转载▼ 标签: 转载 初学者转载 原文地址:机器学习的经典教程(不断更新中)作者:MachineLearner 如今机器学习的学习资源越来越多,对于入行的朋友们来说,他们只需要关注自己从事的具体研究方向最新的国际会议、杂志上的paper就差不多了,而对于那些想要入行的朋友们,选择经典的教程入手可能会事半功倍。以下这些教程,是我这些年接触机器学习以来觉得比较经典的,也欢迎朋友们补充。 一、公开课 Andrew Ng教授的机器学习课程。多啰嗦几句Andrew Ng,他虽然没出过啥书,但是他对这两年接触机器学习的人应该帮助最大了。这哥们是机器学习界大牛Michael Jordan的最得意的门生(据说没有之一),最早只是把公开课视频放到网上,国内网易公开课做了翻译,课程内容安排的真是深入浅出,只要有点微积分和线性代数基础,都能够看明白一些复杂算法的推导(其实这点很重要,一些大牛的paper或者书籍由于篇幅所限,往往一个公式推导需要10步,他只会写最重要的两步,对于初学者来说还是很痛苦的)。由于这个公开课视频受众甚广,好评如潮,Andrew Ng老师伙同斯坦福另一位同事Daphne Koller创建了Coursera这个在线教育平台,和公开课视频相比这个平台更注重和学生交互,能够帮助学生更好地掌握所follow的课程。 公开课推荐: 1、https://https://www.360docs.net/doc/aa16967747.html,/course/ml Andrew Ng在coursera上的机器学习课程,相比公开课来说,内容更简单一些,入门甚佳。 2、https://www.360docs.net/doc/aa16967747.html,/special/opencourse/machinelearning.html Andrew Ng的公开课视频 3、https://https://www.360docs.net/doc/aa16967747.html,/course/pgm Daphne Koller在course上图模型的课程 4、https://https://www.360docs.net/doc/aa16967747.html,/course/neuralnets Geoffrey Hinton的神经网络的课。如果问最近业界最火的机器学习技术是啥?一定是deep learning。如果问是谁让deep learning这么火的,那就是Hinton老师。 应该还有其他类似的公开课资源,但我都没有看过,这里就不乱推荐了,欢迎大家补充。 二、经典书籍 1、Tom M.Mitchell. Machine Learning(有中文版) 2、Kevin P. Murphy. Machine Learning: A Probabilistic Perspective 3、Christopher M.Bishop. Pattern Recognition and Machine Learning 4、Trevor Hastie , Robert Tibshirani , Jerome Friedman. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, Second Edition(有中文版) 第1章 绪 论 教学提示:初步介绍机械设计基础课程研究的内容和机械零件设计的基本要求。 教学要求:掌握构件、零件、机构、机器、机械等名词的含义及机械零件的工作能力计算准则。 1.1 机器的组成 在人们的生产和生活中,广泛使用着各种机器。机器可以减轻或代替人的体力劳动,并大大提高劳动生产率和产品质量。随着科学技术的发展,生产的机械化和自动化已经成为衡量一个国家社会生产力发展水平的重要标志之一。 1.1.1 几个常用术语 1. 机器、机构、机械 尽管机器的用途和性能千差万别,但它们的组成却有共同之处,总的来说机器有三个共同的特征:①都是一种人为的实物组合;②各部分形成运动单元,各运动单元之间具有确定的相对运动;③能实现能量转换或完成有用的机械功。同时具备这三个特征的称为机器,仅具备前两个特征的称为机构。若抛开其在做功和转换能量方面所起的作用,仅从结构和运动观点来看两者并无差别,因此,工程上把机器和机构统称为“机械”。 以单缸内燃机(如图1.1所示)为例,它是由气缸体l、活塞2、进气阀3、排气阀4、连杆5、曲轴6、凸轮7、顶杆8、齿轮9和齿轮10等组成。通过燃气在气缸内的进气—压缩—爆燃—排气过程,使其燃烧的热能转变为曲轴转动的机械能。 单缸内燃机作为一台机器,是由连杆机构、凸轮机构和齿轮机构组成的。由气缸体、活塞、连杆、曲轴组成的连杆机构,把燃气推动的活塞往复运动,经连杆转变为曲轴的连续转动;气缸体、齿轮9和10组成的齿轮机构将曲轴的转动传递给凸轮轴;而由凸轮、顶杆、气缸体组成的凸轮机构又将凸轮轴的转动变换为顶杆的直线往复运动,进而保证进、排气阀有规律的启闭。可见,机器由机构组成,简单的机器也可只有一个机构。 2. 构件、零件、部件 组成机器的运动单元称为构件;组成机器的制造单元称为零件。构件可以是单一的零件,也可以由刚性组合在一起的几个零件组成。如图1.1所示中的齿轮既是零件又是构件;而连杆则是由连杆体、连杆盖、螺栓及螺母几个零件组成,这些零件形成一个整体而进行运动,所以称为一个构件,如图1.2所示。 在机械中还把为完成同一使命、彼此协同工作的一系列零件或构件所组成的组合体称为部件,如滚动轴承、联轴器、减速器等。 编订:__________________ 审核:__________________ 单位:__________________ 起重机械基础常识 Deploy The Objectives, Requirements And Methods To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑 文件编号:KG-AO-4154-96 起重机械基础常识 使用备注:本文档可用在日常工作场景,通过对目的、要求、方式、方法、进度等进行具体的部署,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 一、起重机械的工作特点及其分类 起重机械是以间歇工作方式,升降物件或提升并在限定范围内运移物件的。 起重机械是现代工业生产不可缺少的设备,被广泛的应用于各种物料的起重、运输、装卸和人员输送等作业中。全国起重机械的保有量约25万台左右。全国有起重机生产厂400多家,年产量约3万余台,并以每年10%速度递增。 由于大多数起重机械活动空间大,暴露的活动零部件多,使得事故隐患面积大;作业场所常常需要多人配合,要求指挥、捆扎、驾驶等作业人员配合,存在较大的难度。上述诸多因素的存在,决定了起重机伤害事故较多。据资料统计,我国每年起重伤害事故的死亡人数,占全部工业企业死亡总数的15%左右, 每年起重机事故的死亡人数在所有机械事故死亡人数中居首位。在各类起重机械中,塔吊事故最为突出,据笔者在劳动部职安局工作时统计,全国塔吊在安装和拆卸中,死亡10人以上的特大事故,每年都要发生3起以上。因此,起重机械安全不能不引起人们的重视。 起重机械按其功能和结构特点,可分为三类:第一类:轻小型起重设备,其特点是轻便,机构紧凑,动作简单,作业范围投影以点、线为主;第二类:起重机,其特点是可以使挂在起重吊钩或其他取物装置上的重物在空间实现垂直升降和水平运移;第三类:升降机,其特点是重物或取物装置只能沿导轨升降。这三类起重机械,又是由许多结构和工作用途不同的机械组成的。 除此以外,起重机还有多种分类方法。按取物装置和用途分类,有吊钩起重机、抓斗起重机、电磁起重机、堆垛起重机、集装箱起重机和救援起重机等;按运移方式分类,有固定式起重机、运行式起重机、 机器人动力学研究的典型方法和应用 (燕山大学 机械工程学院) 摘 要:本文介绍了动力学分析的基础知识,总结了机器人动力学分析过程中比较常用的动力学分析的方法:牛顿—欧拉法、拉格朗日法、凯恩法、虚功原理法、微分几何原理法、旋量对偶数法、高斯方法等,并且介绍了各个方法的特点。并通过对PTl300型码垛机器人弹簧平衡机构动力学方法研究,详细分析了各个研究方法的优越性和方法的选择。 前 言:机器人动力学的目的是多方面的。机器人动力学主要是研究机器人机构的动力学。机器人机构包括机械结构和驱动装置,它是机器人的本体,也是机器人实现各种功能运动和操作任务的执行机构,同时也是机器人系统中被控制的对象。目前用计算机辅助方法建立和求解机器人机构的动力学模型是研究机器人动力学的主要方法。动力学研究的主要途径是建立和求解机器人的动力学模型。所谓动力学模指的是一组动力学方程(运动微分方程),把这样的模型作为研究力学和模拟运动的有效工具。 报告正文: (1)机器人动力学研究的方法 1)牛顿—欧拉法 应用牛顿—欧拉法来建立机器人机构的动力学方程,是指对质心的运动和转动分别用牛顿方程和欧拉方程。把机器人每个连杆(或称构件)看做一个刚体。如果已知连杆的表征质量分布和质心位置的惯量张量,那么,为了使连杆运动,必须使其加速或减速,这时所需的力和力矩是期望加速度和连杆质量及其分布的函数。牛顿—欧拉方程就表明力、力矩、惯性和加速度之间的相互关系。 若刚体的质量为m ,为使质心得到加速度a 所必须的作用在质心的力为F ,则按牛顿方程有:ma F = 为使刚体得到角速度ω、角加速度εω= 的转动,必须在刚体上作用一力矩M , 则按欧拉方程有:εωI I M += 式中,F 、a 、M 、ω、ε都是三维矢量;I 为刚体相对于原点通过质心并与刚起重机械基础常识(正式版)
python深度学习基础教程下载
935机械设计基础
机械设计理论与方法的研究
塔式起重机基础知识汇总(整理版)
(完整word版)机械设计考试题库(带答案)
起重机械基础常识
机械制图课程教学大纲
《机器学习》课程教学大纲
机械设计及理论.doc
建筑起重机械安全基础知识考试题
机器学习个人笔记完整版v5(原稿)
2020年起重机械安全常识
人工智能视频教程全集
机器学习过程
机械设计原理
起重机械基础常识
机器人动力学