基于VC 的运动控制卡软件系统设计
基于VC++的运动控制卡软件系统设计
在自动控制领域,基于PC和运动控制卡的伺服系统正演绎着一场工业自动化的革命。目前,常用的多轴控制系统主要分为3大块:基于PLC的多轴定位控制系统,基于PC_based的多轴控制系统和基于总线的多轴控制系统。由于PC 机在各种工业现场的广泛运动,先进控制理论和DSP技术实现手段的并行发展,各种工业设备的研制和改造中急需一个运动控制模块的硬件平台,以及为了满足新型数控系统的标准化、柔性化、开放性等要求,使得基于PC和运动控制卡的伺服系统备受青睐。本文主要是利用VC++6.0提供的MFC应用程序开发平台探索研究平面2-DOF四分之过驱动并联机构的运动控制系统的软件开发。
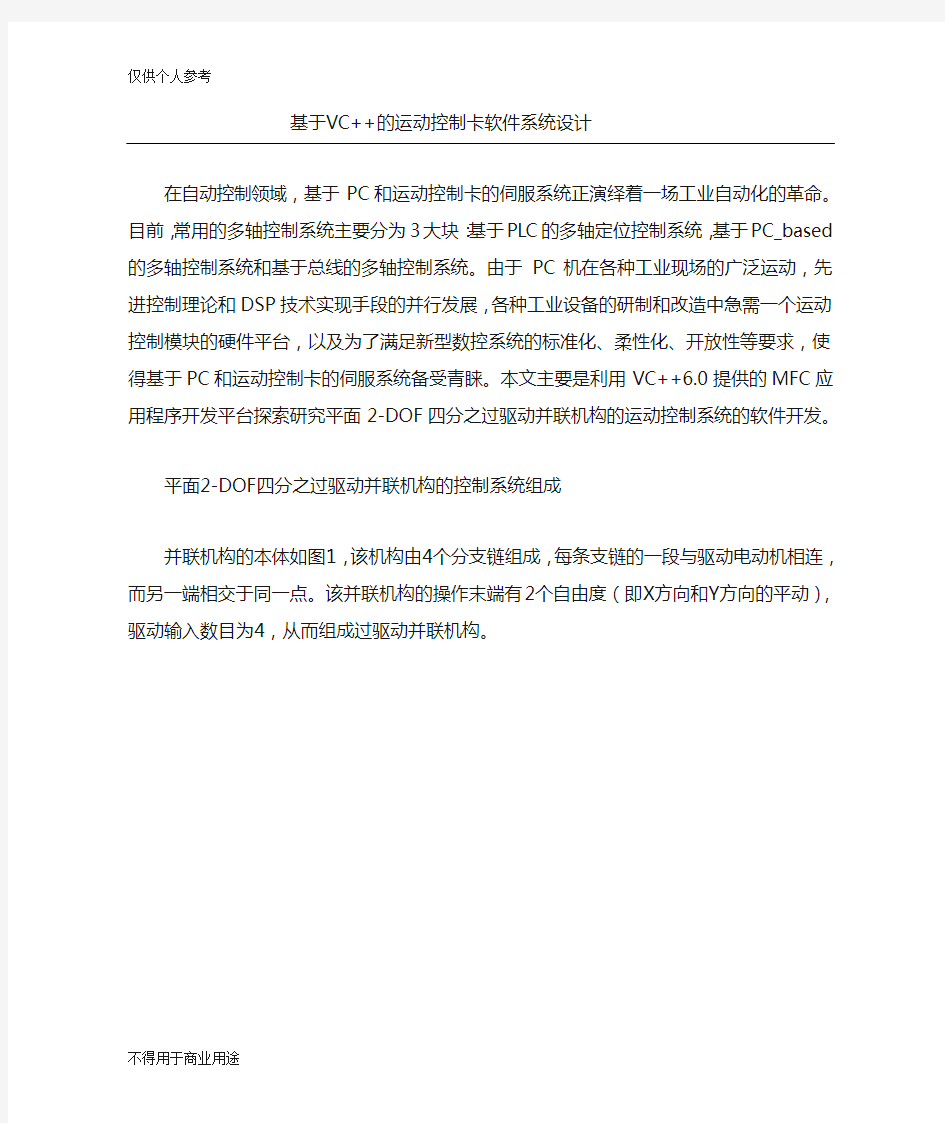
平面2-DOF四分之过驱动并联机构的控制系统组成
并联机构的本体如图1,该机构由4个分支链组成,每条支链的一段与驱动电动机相连,而另一端相交于同一点。该并联机构的操作末端有2个自由度(即X 方向和Y方向的平动),驱动输入数目为4,从而组成过驱动并联机构。
For personal use only in study and research; not for commercial use
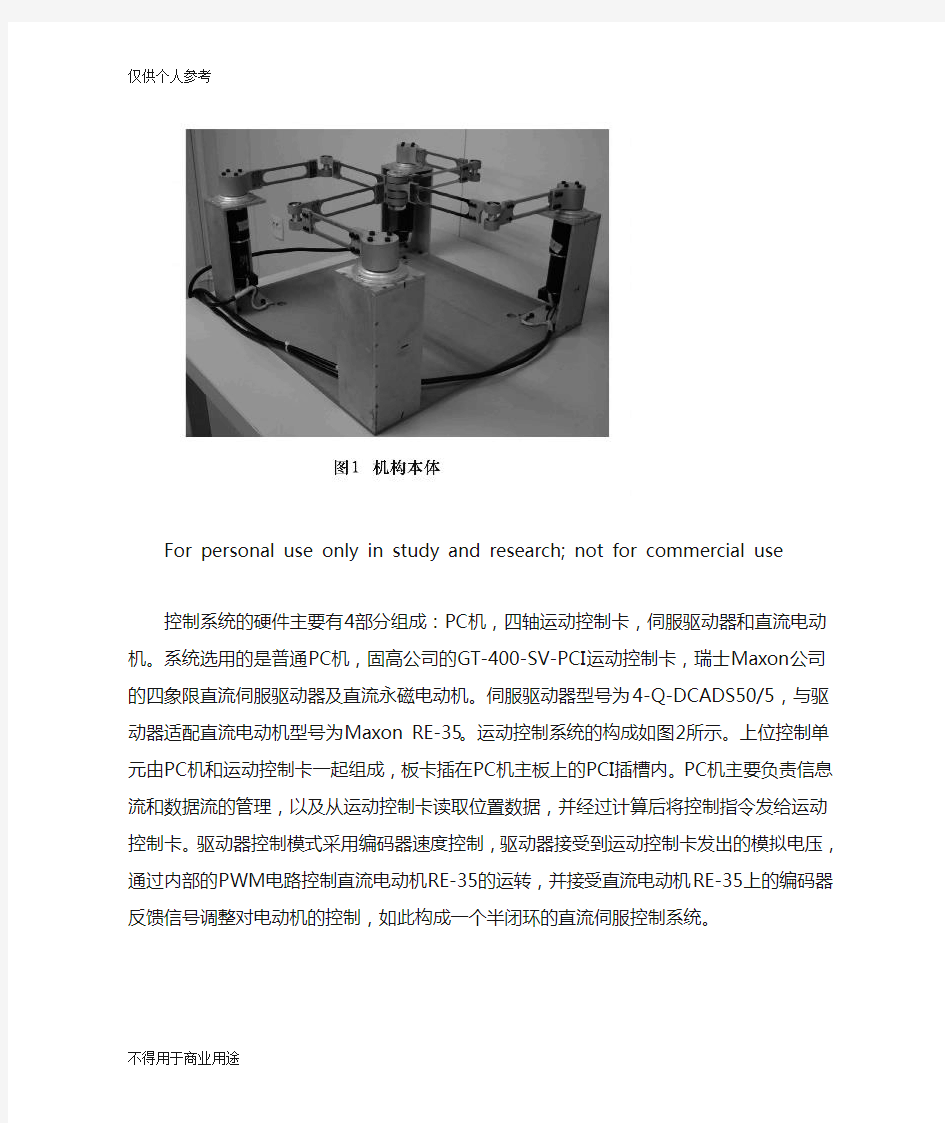
控制系统的硬件主要有4部分组成:PC机,四轴运动控制卡,伺服驱动器和直流电动机。系统选用的是普通PC机,固高公司的GT-400-SV-PCI运动控制卡,
瑞士Maxon公司的四象限直流伺服驱动器及直流永磁电动机。伺服驱动器型号为4-Q-DCADS50/5,与驱动器适配直流电动机型号为Maxon RE-35。运动控制系统的构成如图2所示。上位控制单元由PC机和运动控制卡一起组成,板卡插在PC机主板上的PCI插槽内。PC机主要负责信息流和数据流的管理,以及从运动控制卡读取位置数据,并经过计算后将控制指令发给运动控制卡。驱动器控制模式采用编码器速度控制,驱动器接受到运动控制卡发出的模拟电压,通过内部的PWM电路控制直流电动机RE-35的运转,并接受直流电动机RE-35上的编码器反馈信号调整对电动机的控制,如此构成一个半闭环的直流伺服控制系统。
1.1 GT-400-SV控制卡介绍
For personal use only in study and research; not for commercial use
固高公司生产的GT系列运动控制卡GT-400-SV-PCI可以同步控制4个轴,实现多轴协调运动。其核心由ADSP2181数字信号处理器和FPGA组成,能实现高性能的控制计算。控制卡同时提供了C语言函数库和Windows下的动态链接库,可实现复杂的控制功能。主要功能如下:
(1) PCI总线,即插即用;
(2)可编程伺服采样周期,4轴最小插补周期为200us,单轴点位运动最小控制周期为25us;
(3) 4路16位分辨率模拟电压输出信号或脉冲输出信号模拟量输出范围:-10V-+10V,每路课独立控制,互不影响;
(4) 4路四倍频增量编码器输入,作为各轴反馈信号输入,最高频率8MHz;
(5)四轴协调运动;
(6)每轴2路限位开关信号、一路原点信号及一路驱动报警信号输入;
(7)每轴1路驱动使能信号、1路驱动复位信号输出;
(8)运动方式:单轴点位运动、直线插补、圆弧插补、速度控制模式、电子齿轮模式;
(9) PID(比例-积分-微分)数字滤波器,带速度和加速度前馈,带积分限值、偏差补偿和低通滤波器;
(10)支持DOS、WindowsNT/2000/XP等操作系统,提供底层库函数,可用DOS、VC、VB等进行软件开发。
控制卡结构及端子板的接口如图3所示。
1.2 直流永磁电动机PWM驱动基本原理
图4为利用开关管实现直流电动机PWM调速控制的原理图和输入输出电压波形。当开关MOSFET的栅极输入高电平时,开关管导通,直流电动机电枢绕组两端
有电压Us。T1时间后,栅极输入变为低电平,开关管截止,电动机电枢两端电压为零。T2时间后,栅极输入重新变为高电平,开关管重复前面的动作过程。这样,对应着输入的点评高低,直流伺服电动机电枢绕组两端的电压波形如图4b所示。
占空比a表示了在一个周期T里,开关管导通的时间与周期的比值。a的变化范围为0 2 基于GT-400-SV-PCI卡的软件设计 GT-400-SV控制卡具有良好的开放性,用户可以再DOS、VC、VB、Delphi环境下进行软件开发。文中是在Windows2000系统下利用Visual C++6.0的MFC以面向对象方式进行编程。控制卡在Windows下开发的底层动态库包括头文件GT400.h,GT400.lib和GT400.dll。在VC++环境中使用时,选择Project—Setting—Link,在Object/Library modules中输入GT400.lib,然后就可以在程序中调用动态链接库中的函数。 2.1 Windows程序内部运行原理 因为Visual C++6.0是Windows开发语言,所以用Visual C++6.0开发程序之前首先需要弄清楚Windows程序内部运行机制。在Windows环境下的软件开发是完全不同于DOS下的,它是一种事件驱动方式的程序设计模式,主要是基于消息的。当用户需要完成某种功能时,会调用操作系统的某种支持,然后操作系统将用户的需要包装成消息并投递到消息队列当中,最后应用程序从消息队列中取走消息并进行响应。 2.2 程序设计 运动控制卡接受PC机上发出的操作命令和运动控制系统反馈回的信息,并据其进行实时的运动操作,直接控制伺服驱动器。控制卡控制直流电动机的过程可分为:打开控制卡并初始化,设置运动参数,执行运动程序,关闭卡。控制系统流程图如图5所示。 2.2.1 卡的初始化 卡的初始化应在程序开始时就执行,主要用到的控制函数见表1。 表1 函数名称及功能 名称功能 GT_Open()打开运动控制器设备 GT_Reset()复位运动控制器 GT_SetSmplTm()设置控制周期 GT_LmtSns()设置限位开关的有效电平 GT_EncSns()设置编码器的记数方向 GT_CloseLp()设置为闭环控制 GT_CtrlMode()设置输出模拟量/脉冲量 以上参数应根据具体的硬件平台来设置,一般只在程序初始化时设置一次,以后不应再设置。 另外,控制周期的设定GT_SetSmplTm(double Timer),参数Timer的单位是us。因为运动控制卡要在控制周期内完成必要的控制计算,控制周期不能太小,因此设定的范围为48-1966.08us。运动控制卡默认的控制周期为200us,这个控制周期对于普通的用户能够安全可靠地工作。一般情况下,在程序中不应改变控制周期值,否则会出现不可预期的后果。 2.2.2 运动控制模块 该运动控制卡可以实现单轴及多轴协调运动。对于单轴所执行的运动操作有绝对运动、连续点动、急停缓停、回零等;对于多轴协调运动有直线插补和圆弧插补。 单轴运动控制主要用来调试直流电动机运动性能。采用梯形曲线运动模式,设置速度、加速度、目标位置3个参数,通过设置合适的PIDP控制参数,使电动机运动达到系统设计要求。 4轴协调运动采用直线插补法,正确的设置坐标映射,合成速度、加速度,再加轨迹设置命令及目标位置,即可实现四轴协调运动。运动控制卡通过坐标映射函数GT_MapAxis(short Axis_Num,double * map_count)将控制轴由单轴运动控制模式转换为坐标系运动控制模式。同时运动控制卡开辟了底层运动数据缓冲区,在坐标系运动控制模式下,可以实现多段轨迹快速、稳定的连续运动。这些 运动操作都是相互独立的,在控制面板中每个操作按键对应一个独立的事件。 2.2.3 运动状态显示模块 通过调用GT_GetAltPos(long * Apos)和GT_GetPrfPnt(double * Pnt)分别获得当前轴的实际位置和坐标系各轴的坐标位置,参数*Apos返回实际位置,双精度参数*Pnt指向一个长度为4的数组。然后转换成各电动机的实际角度,并在控制面板上显示。 2编程开发实例 现以单轴调试与4轴协调运动实现直线和圆轨迹为例具体介绍开发过程:打开Visual C++6.0,利用MFC AppWizard[exe]创建一个基于对话框的Robot2008工程,将GT400.h,GT400.lib添加进工程,编程时要在头文件里包含头文件GT400.h。在对话框中添加按钮和编辑框等操作见图6。 单轴控制模块,先在OnInitDialog()中添加如下代码,进行初始化工作:GT_Open(); GT_Reset(); GT_LmtsOff(); GT_AlarmOff(); GT_CtrlMode(0); GT_CloseLp(); 在CRobot2008Dlg中添加成员变量m_Kp,m_Ki,m_Kd,m_Pos,m_Vel,m_Acc 并作原型说明。然后在“单轴运动”按钮添加BN_CLICKED消息响应的函数OnButtonSrtMov(),并在函数中添加如下代码: GT_Axis(); GT_AxisOn(); GT_ZeroPos(); GT_PrflT(); GT_SetKp(m_Kp); GT_SetKi(m_Ki); GT_SetKd(m_Kd); GT_SetPos(m_Pos); GT_SetVel(m_Vel); GT_SetAcc(m_Acc); GT_Update(); 最后在“单轴停止”按钮BN_CLICKED响应函数OnButtonStop()中添加代码: GT_AxisOff(); GT_Close(); 四轴协调运动的初始化与单轴情况基本相同,但要加入坐标映射函数GT_MapAxis(short Axis_Num,double *map_count)。 double cnt1[5]={1,0,0,0,0}; double cnt2[5]={0,1,0,0,0}; double cnt3[5]={0,0,1,0,0}; double cnt4[5]={0,0,0,1,0}; GT_MapAxis(1,cnt1); GT_MapAxis(2,cnt2) GT_MapAxis(3,cnt3); GT_MapAxis(4,cnt4); GT_MvXYZA(0,0,0,0,1,0.01); 前文已提到,运动显示模块经编译无误后生成可执行文件,执行后如图7所示。与硬件连接后可以实现对平面2-DOF四分之过驱动并联机构末端位置的直线及圆运动位置规划,可以实时读出直流电动机转角位置,达到了预期效果。 3结语 本文利用Visual C++6.0提供的微软基础类库MFC及控制卡支持的底层函数库,详细介绍了二次开发的全过程并给出了编程实例,方便对多轴运动控制卡软件开发的理解。整个控制软件能完成数据及运动状态显示、伺服驱动、并联机构的位置规划等任务。实践证明该并联机构控制系统运行稳定。 仅供个人用于学习、研究;不得用于商业用途。 For personal use only in study and research; not for commercial use. Nur für den pers?nlichen für Studien, Forsch ung, zu kommerziellen Zwecken verwendet werden. Pour l 'étude et la recherche uniquement à des fins personnelles; pas à des fins commerciales. толькодля людей, которые используются для обучения, исследований и не должны использоваться в коммерческих целях. 以下无正文 运动控制卡开发四步曲 1使用黑金开发板实现脉冲控制的运动控制卡 运动控制器第一步:实现简单脉冲控制系统 方式、 占空比 可编程 脉冲输 出 1.1使用Quartus II软件建立SOPC工程,按照上图建立添加所需CPU及外设。 1.2使用Nios II建立UC-OS-II工程。 1.3在UC-OS-II中建立一个任务,用于收发以太网数据,跟上位机通讯。 1.4在Quartus II中加入编码器解析模块,将来自编码器的AB信号转化成位置和速度,并支持总线读写,最高编码器脉冲频率20M。 1.5在Quartus II中加入脉冲输出模块,实现CPU发出的脉冲速度和脉冲数,最高输出脉冲频率8M。 1.6在Nios II中规划速度曲线,周期200us输出一个脉冲速度。 1.7连接驱动器和电机进行调试。 1.8加入缓冲控制。 1.9加入高速捕获功能。 1.10加入回零功能。 2使用DSP开发板+黑金开发板实现脉冲控制的运动控制卡 运动控制器第二步:DSP+FPGA脉冲控制系统 方式、 占空比 可编程 脉冲输 出 电压保护 2.1在第一步的系统中,增加与DSP通信的模块。 2.2Nios II中接收到上位运动指令之后,发出中断信号给DSP,DSP读取运动数据。 2.3DSP读取位置信号,规划出速度曲线输出到FPGA输出脉冲。 3. 连接驱动器和电机进行调试。 3使用DSP开发板+黑金开发板实现速度控制的运动控制卡 运动控制器第三步:DSP+FPGA 速度控制系统 8路模 拟量输出 3.1在第二步的基础上,在DSP 中增加位置环调节算法,输出速度曲线到FPGA ,FPGA 控制DA 输出模拟量。 3.2连接驱动器和电机进行调试。 4实现速度控+脉冲制的运动控制卡 电压保护 运动控制器第四步:DSP+FPGA 速度控制运动控制器 8路模 拟量输出 16方式、占空比可编程脉冲输出 线驱动器 1、为什么说转矩控制是运动控制的根本?试用负载特性曲线比较恒转矩、恒功率和风 机、泵类负载的区别。 2、简]述直流PWM 变换器-电动机系统(直流斩波器)原理(画图说明)? 3、试述晶闸管触发整流器为何有失控时间?频率为50Hz 情况下,三相半波整流器的平 均失控时间是多少? 4、对于恒转矩负载,为什么调压调速的调速范围不大?电动机机械特性越软,调速范 围越大吗? 1、某调速系统,min /1500max 0r n =,min /150min 0r n =,额定负载时的速降min /15r n N =?,若不同转速下额定速降不变,则系统能达到的调速范围是多少?系统允许的静差率是多少? 2、某闭环系统开环放大倍数是15时,额定负载下的速降是8r/min ;如果开环放大倍数是30时,速降是多少?同样静差率下,调速范围扩大多少? 3、有一V-M 系统,电动机参数:额定功率2.2kW ,额定电压220V ,额定电流12.5A ,额定转速为1500r/min ,电枢电阻1.2Ω,整流装置内阻1.5Ω,触发整流环节放大倍数为35,要求系统满足调速范围D=20,静差率小于10%。若采用转速负反馈闭环系统,若主电路电感L=50mH ,系统的转动惯量1.6N.m 2,整流采用三相半波,试判断系统是否稳定?如要稳定,闭环系统的开环放大系数应调整为多少? 4、旋转编码器光栅数为1024,倍频系数为4,高频时钟脉冲频率1MHz ,旋转编码器输出脉冲个数和高频时钟脉冲个数均采用16位计数器,M 法和T 法测速时间均为0/01s ,求转速为1500r/min 和150r/min 时的测速分辨率和误差率最大值。 一个转速、电流双闭环调速系统。 已知:1)电动机:kW P N 555=,V U N 750=,A I N 760=,min /375r n N =,电动势系数r V C e min/82.1?=; 2)主回路总电阻Ω=14.0R ,允许电流过载倍数5.1=λ,触发整流环节放大倍数75=S K ,整流装置为三相桥式; 3)电磁时间常数s T l 031.0=,机电时间常数s T m 112.0=,电流反馈滤波时间常数s T oi 002.0=,转速反馈滤波时间常数s T on 02.0=, 目录 PMAC控制卡学习(硬件) (2) 第一章PMAC简介 (2) 1.1 PMAC的含义和特点 (2) 1.2 PMAC的分类及区别 (2) 1.2.1 PMAC的分类 (2) 1.2.2 PMAC 1型卡与2型卡的主要区别 (2) 第二章Turbo PMAC Clipper控制器硬件配置 (3) 2.1 Turbo PMAC Clipper控制器简介 (3) 2.2 Turbo PMAC Clipper硬件配置 (3) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (3) 2.2.2 Turbo PMAC Clipper控制器可选附件 (6) 2.2.2.1 轴接口板 (6) 2.2.2.2 反馈接口板 (6) 2.2.2.3 数字I/O接口板 (7) 第三章Turbo PMAC Clipper设备连接 (7) 3.1 板卡安装 (7) 3.2 控制卡供电 (7) 3.2.1 数字电源供电 (7) 3.2.2 DAC(数字/模拟转换)输出电路供电 (7) 3.2.3 标志位供电 (8) 3.3 限位及回零开关 (8) 3.3.1 限位类型 (8) 3.3.2 回零开关 (8) 3.4电机信号连接 (8) 3.4.1增量式编码器连接 (8) 3.4.2 DAC 输出信号 (9) 3.4.3 脉冲&方向(步进)驱动 (10) 3.4.4 放大器使能信号(AENAn/DIRn) (10) 3.4.5 放大器错误信号(FAULT-) (10) 3.4.6 可选模拟量输入 (11) 3.4.7 位置比较输出 (11) 3.4.8 串行接口(JRS232) (11) 3.5 设备连接示例 (11) 3.6 接口及指示灯定义 (13) 3.7 跳线定义 (15) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (19) 附件 (21) 1.接口各针脚定义 (21) 2. 电路板尺寸及孔位置 (30) — 内容摘要 随着电子技术的发展,可编程控制器(以下简称PLC)不断更新、发展,PLC控制是自动控制中最常见控制方式之一,自动门就是自动控制应用的一典型例子,由于可编程控制器具有很好的处理自动门的开关控制及良好的稳定性,而且可以很简单的改变控制的方式,因此,自动门的生产商家很多都运用PLC来做门的控制器。目前自动门在日常生活中运用越来越广泛。 索引关键词:PLC 变频器驱动装置感应器 , — ] \ 目录 第一章绪论 (1) 国内外自动门发展现状 (1) 本课题研究的内容 (1) 本课题研究的目的和意义 (2) 第二章自动门控制系统总体方案设计 (3) 自动门的功能需求分析 (3) 系统设计的基本步骤 (4) 自动门技术参数的确定 (4) 自动门的机械传动机构设计 (4) 第三章自动门硬件系统的设计 (5) 控制系统结构设计 (5) 可编程控制器(PLC)的选型 (6) 驱动装置的选型 (8) 变频器的选型 (9) 感应开关的选型 (11) 后记 (12) 参考文献 (13) 自动门控制系统的设计 第一章绪论 国内外自动门发展现状 在国外,进入90年代以来,自动化技术发展很快,技术已经相对成熟,并取得了惊人的成就,自动化技术是自动门的重要部分。在现代人们生活中自动门可以节约空调能源、降低噪音、防风、防尘,同时可以使出入口显得庄重高档,因此应用非常广泛。 随着我国经济的飞速发展,自动门在人们的生活中的运用越来越广泛,自动门适合于宾馆、酒店、银行、写字楼、医院、商店等,使用自动门。但在国内,自动门的自主研发尚处于初级阶段。在自动门控制系统的设计中,稳定、节能、环保、安全及人性化是需要首先考虑的因素。 由于门体的重量及体积不同会对自动门驱动和传动系统提出不同的要求,所以各种自动门又可以分为重型自动门和轻型自动门。 客流量的差异会对自动门的使用产生很大影响,因此,自动门还可以分为一般自动门和可频繁使用的自动门。 自动门根据使用的场合及功能的不同可分为自动平移门、自动平开门、自动旋转门、自动圆弧门、自动折叠门等,其中平开门用的场合较少,旋转门由于昂贵而且非常庞大,一般只用于有需要的高档宾馆,自动平移门使用得最广泛,大家一般所说的自动门、感应门就是指自动平移门,目前市场上流行的平移型自动门一般是两开,这种门的特点是简单易控,维护方便。 自动平移门最常见的形式是自动门内外两侧加感应器,当人走近自动门时,感应器感应到人的存在,给控制器一个开门信号,控制器通过驱动装置将门打开。当人通过门之后,再将门关闭。由于自动平移门在通电后可以实现无人管理,既方便又提高了建筑的档次,于是迅速在国内外建筑市场上得到大范围的普及。 自动门的控制方法很多,从控制器的不同来分,有传统的继电器控制,即通过按钮和复杂的接线安装来控制;智能控制器控制,即通过运用现代自动化设备来控制,它具有稳定性高,安全等优点,因此被很多生产厂商所运用。由于继电器逻辑控制的自动门系统因存在许多缺陷而逐步被智能控制器控制控制的自动门所淘汰。 在智能控制器的选择上,自动门的主控器有微电脑控制器控制和可编程控制(PLC)控制,微电脑控制主要有体积小、安装方便等特点,目前有许多厂家采用此种方式生产自动门,PLC控制的特点是稳定型高、维护方便,目前许多大型的商场的自动门都是由这种方式来控制。 本课题研究的内容 本设计将在以下几个方面对自动门的控制系统进行研究和论证。 1.1维鸿系统的安装 在安装新的维鸿前,请删除旧版本的维鸿。删除的方法请参考程序卸载一节。维鸿系统包括软件和运动控制卡两部分。所以,系统的安装也分为两个阶段:软件安装和运动控制卡的安装。 总体上,请您在安装完软件之后再安装运动控制卡,这样运动控制卡的驱动 程序就不需要单独安装。所以简单以说,可以分为这样几个步骤: (1)安装维鸿软件,待安装程序提示关闭计算机后,关闭计算机。 (2)关闭计算机后,安装运动控制卡。 (3)重新启动计算机,进入Windows操作系统后,略微等待一会,待Windows 自动完 成配置,整个安装工作就算完成了。 (4)运行维鸿系统。 下面详细介绍其中的关键步骤。 维鸿软件安装 请按照下面的步骤安装软件: (1)打开计算机电源,启动计算机,系统自动运行进入Windows操作系统。 如果你还没有安装Windows操作系统,请首先安装该操作系统。 (2)Windows操作系统启动后,注意请关闭其他正在运行的程序。 (3)解压维鸿V2.0免安装包,打开里面的dotNetFrameWork文件夹,安装 dotNetFx40_Full_x86_x64.exe (4)打开维鸿V2.0文件夹,右键创建桌面快捷方式 (5)双击打开桌面快捷键方式,运行维鸿。 NcStuHio.... 维鸿软件驱动安装 USB 设备驱动支持XP 、win7或win8等32位操作系统,任何一个小的错误 都有可能安装驱动失败。 1. 将USB 数据线连接到电脑任意 USB 接口,若出现新硬件向导信息提示 中选“是,仅这一次(I ) ”选项,点击“下一步”。在出现新硬件向导信息提示 中选“从列表或指定位置安装(高级)”选项,点击“下一步”。 X Nc^tudi^.exe 二 NcStudia.txe.config 话 ” Ncituclio.ini ,INcstudi? 」Ncitudisoooooao 込 Noiijdll Ncuixllljcorifiig O public.dat X WHDJcc 空 2y U S B Ds vAtkr .d 11 2015-S^I 14:21 创建日! S9J KB 36D 云盘 嵯(H) WifilVlerge 康用360im 占用 梔用3讯動删住 隹角北0时本旦云査棗 梅用何勰右歸理 口上传到百度云 雄到任务栏(K) 附刹[幵冏菓鱼(U) 瓯以前旳龄S 盘送對㈣ 蛊切⑴ 复制(0 IW) 创建快捷方式(S) 892 KE Figurdti... 1 KB 1 KB 73 KB 2 KG 4展 1,243 KB Team Viewer 辫 传惑初 Q 压宿izi p p E d)艾彳牟宝 邮件阳牛人 ■ ,DVD RW 3動髓 ? 自动控制系统管理 控制系统主要包括DCS控制系统、PLC可编程控制器、闭路控制计算机系统、汽车装车站以及在先进过程控制中使用的上位计算机等。 一、电仪工段应加强对系统的日常维护检查,根据责任区划分进行点检和定期维护。 二、系统周检发现的问题,应及时填写缺陷记录,并立刻组织人员处理解决。 三、由电仪工段专业人员按照实际进行备品备件储备,并定期对软件进行备份。 四、岗位操作人员必须认真执行操作规程,爱护机器设备,严禁任何人运行与系统无关的软件,计算机必须专人操作,严禁串用或随意调整,操作人员和其他非电脑维护人员不得更换 电脑硬件和软件,严禁使用来历不明的软件、光盘和其它有可能带来病毒的工具,严禁使用系统电脑进行上网。 五、工艺参数、联锁设定值的修改,要由生产部门提出申请或办理联锁工作票后(申请和工作票要由生产部审批),由电仪专业人员或厂家人员进行修改并做好记录。 六、非工作人员未经批准严禁进入控制室,控制室人员应按规定着装。进入控制室作业人员必须采取静电释放措施,消除人身所带的静电 七、控制室内严禁吸烟,严禁带入易燃易爆和有毒物品,不得在控制室吃东西,机柜上下不得堆放杂物。 八、控制室内必须经常清扫,消防、安全设施要齐全,并定期进行检查。 九、系统供电及接地系统必须符合标准,UPS电源是过程控制计算机系统的专用电源,室内的维修用电、吸尘器、电风扇、空调机用电及其他临时性用电一律不得接入计算机电源系统。 十、非专业人员不得私自运行其他与生产无关的操作。操作人员和其他非电脑维护人员不得私自退出监控系统,未经许可,任何人不得随便支用电脑设备。 十一、工控电脑是我公司生产控制和管理的核心,凡因个人原因所造成的事故,要严格追究其责任事故。 目录 PMAC控制卡学习(硬件) 第一章PMAC简介 PMAC的含义和特点 1.PMAC的含义: PMAC是program multiple axis controller 可编程的多轴运动控制卡。 的特点: PMAC卡是美国Delta Tau公司九十年代推出的多功能运动控制器,能够提供运动轴控制,PLC控制和数据采集等多种功能。 PMAC的分类及区别 PMAC的分类 1. PMAC卡按控制电机的来分:有1型卡和2型卡。1型卡控制信号为±10V 模拟量,主要用速度方式控制伺服电。2型卡输出PWM数字量信号,可直接变为PULSE+DIR信号,来控制步进电机和位置控制方式的伺服电机。 2. PMAC卡按控制轴数来分:有2轴卡(MINI PMAC PCI),4轴卡(PMAC PCI Lite,PMAC2 PCI Lite,PMAC2A-PC/104及Clipper),8轴卡:(PMAC-PCI,PMAC2-PCI,PMAC2A-PC/104及Clipper),32轴卡:(TURBO PMAC和TURBO PMAC2)。 3. PMAC卡按通讯总线形式分:有ISA总线,PCI总线,PCI04总线,网口和VME总线。PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。PMAC除上述形式外,还可以提供集成的系统级产品.有:UMAC,IMAC400,IMAC800 ,IMAC flexADVANTAGE400 ,ADVANTAGE900等。 PMAC 1型卡与2型卡的主要区别 PMAC 1 PMAC2 CPU时钟(缺省)20MHZ 40MHZ 控制信号形式DAC模拟量PWM数字量 双端口RAM选项只有8轴卡不在板在板 在板I/O点数16IN 16OUT 32IN/OUT +8IN 8 OUT 常用接线板ACC8D ACCP ACC8F ACC8S ACC8E 第二章Turbo PMAC Clipper控制器硬件配置Turbo PMAC Clipper控制器简介 Turbo PMAC Clipper控制器(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,用于对成本极端敏感的应用的多轴运动控制器。这种功能强大的,但是又同时具备结构紧凑和超高性价比优点的多轴运动控制器,标准版本即带有Ethernet 以太网和 RS232 通讯接口以及内置 I/O。 Clipper 控制器不仅采用了一颗完整的Turbo PMAC2-CPU 而且提供了一个四轴伺服或步进控制加32个数字I/O 点的最小配置,控制轴数和I/O还可以扩展。 Turbo PMAC Clipper硬件配置 Turbo PMAC Clipper硬件标准配置为: ●电路板尺寸是110mm×220mm; ●80 MHz DSP56303 Turbo PMAC CPU(CPU时钟频率为80MHZ); ●256k x 24用户SRAM(即静态随机存储器,是一种具有静止存取功能的,不需 要刷新电路即能保存它内部存储的数据。存储容量为256K,地址线有24条。); ●1M x 8 flash mermory用于备份及固件存储;(闪存是一种非易失性,即断 电数据也不会丢失。内存为1M,8条I/O接口。); ●RS-232串行接口;(上的之一,通常 RS-232 接口以9个(DB-9)的型态出现, 一般个人上会有两组 RS-232 接口,分别称为 COM1 和 COM2。); ●100 Mbps以太网接口;(传输速率100Mbps=100/8=s) ●480 Mbps USB 接口; 毕业设计报告(论文) 内容摘要 自动门在人们的日常生活中已经得到了广泛的应用,同时人们对其性能和安全等方面的要求也越来越高。由于的高稳定性和对环境较强的适应能力,使得在自动门控制装置中的应用也日益广泛。本文围绕自动门控制系统展开研究。首先分析了国内外自动门发展的趋势和所采用的技术,然后对系统作了简要说明。并按照自动门控制装置的要求,设计了相应的梯形图和指令表程序,实现了自动门由检测到开启、计时等待、关闭的全过程。随着电子技术的发展,不断的更新,控制已成为自动控制中最常见的方式之一。自动门就是自动控制应用的以典型例子,由于可编程控制器具有很好的处理自动门开关控制及良好的稳定性,而且可以很简单的改变控制的方式,因此,自动门的生产商家很多都运用来做门的控制器。目前自动门在日常生活中用越来越广泛。控制具有较高的可靠性、稳定性、维修方便等优点。 索引关键词:自动门可控制编程器变频控制 目录 自动门控制系统的设计 第一章概论 随着世界经济和中国经济的不断发展,门的概念日益显现出来,现今社会门更加突出它的安全性,强调它的有效性,安全有效的通行、疏散,同时它的艺术的理念越来越突出,强调门与艺术的完美结合,我们要达到的目的就是门与其所在建筑以及周围自然环境的和谐。自动门专业和规模的生产可以追溯到很久以前,在其不断进步的历史过程中,涌现出大批深受用户好评的专业制造商。自动门的发展起源在欧美,经过多年的发展,现在已经形成了功能完善、做工精良的自动门系列。 在许多公共场所中,为了增添了高端、时尚的因素。自动门得到广泛的应用。自动门的发展可以解释为人类门的应用观念的继续,是人们依据不同需求对门的功能的提升和应用的完善。因此我们对自动门的认知应从人们对门性能的要求开始。门是所有建筑物必不可少的一部分,从最原始的功能来讲,门要具有隔离外部环境和方便通行这两种作用。因此门应该更加可靠、密封。随着自动门的大面积发展,人们对于门的作用也不断改变,人们的安全观念不断提升。自动门不但能够改善出入口环境,而且能够保护人们的出行安全。就我国现阶段来说,我国现在没有制定自动门的国家标准,使我国自动门性能、质量参差不齐。自动门在通电后可以自动控制无需人工管理,同时又节约了大量空间资源,防风、防尘、降低噪音,既提高了建筑的档次,又方便了人们出行,这是由于这些特点自动门在近几年国内外的各种市场迅速发展并得到大范畴的应用。 在本次自动门设计中我们采用做控制器可以增强自动门运行的稳定性和安全性,同时也大大地改善了自动门的使用效果。自动门的控制系统的设计具有很重要的现实意义,不但可以为自动门行业的发展提供技术支持,而且扩大了在该行业甚至整个自动化行业的全面应用,因此该设计具有很大的经济价值和理论研究意义。在国外,进入20世纪90年代以来,自动化技术发展迅猛,技术已经相对成熟,并取得了惊人的成就,自动化技术是自动门的重要部分。在现代人们生活中自动门可以节约空调能源、降低噪音、防风、防尘,同时可以使出入口显得庄重高档,因此应用非常广泛。 随着我国经济的飞速发展,自动门在人们的生活中的运用越来越广泛,自动门适合于宾馆、酒店、银行、写字楼、医院、商店等,使用自动门。但在国内,自动门的自主研发尚处于初级阶段。在自动门控制系统的设计中,稳定、节能、环保、安全及人性化是需要首先考虑的因素。 第二章自动门控制系统总体设计 2.1自动门的控制过程和要求 自动门控制过程和要求,具体如下: 运动控制卡概述 ? ?主要特点 ?SMC6400B独立工作型高级4轴运动控制器 功能介绍: 高性能的独立工作型运动控制器以32位RISC为核心,控制4轴步进电机、伺服电机完成各种功能强大的单轴、多轴运动,可脱离PC机独立工作。 ●G代码编程 采用ISO国标标准G代码编程,易学易用。既可以在文本显示器、触摸屏上直接编写G代码,也可以在PC机上编程,然后通过USB通讯口或U盘下载至控制器。 ●示教编程 可以通过文本显示器、触摸屏进行轨迹示教,编写简单的轨迹控制程序,不需要学习任何编程语言。 ●USB通讯口和U盘接口 支持USB1.1全速通讯接口及U盘接口。可以通过USB接口从PC机下载用户程序、设置系统参数,也可用U盘拷贝程序。 ●程序存储功能 程序存储器容量达32M,G代码程序最长可达5000行。 ●直线、圆弧插补及连续插补功能 具有任意2-4轴高速直线插补功能、任意2轴圆弧插补功能、连续插补功能。应用场合: 电子产品自动化加工、装配、测试 半导体、LCD自动加工、检测 激光切割、雕铣、打标设备 机器视觉及测量自动化 生物医学取样和处理设备 工业机器人 专用数控机床 特点: ■不需要PC机就可以独立工作 ■不需要学习VB、VC语言就可以编程 ■32位CPU, 60MHz, Rev1.0 ■脉冲输出速度最大达8MHz ■脉冲输出可选择: 脉冲/方向, 双脉冲 ■2-4轴直线插补 ■2轴圆弧插补 ■多轴连续插补 ■2种回零方式 ■梯型和S型速度曲线可编程 ■多轴同步启动/停止 ■每轴提供限位、回零信号 ■每轴提供标准伺服电机控制信号 ■通用16位数字输入信号,有光电隔离 ■通用24位数字输出信号 ■提供文本显示器、触摸屏接口 技术规格: 运动控制参数 运动控制I/O 接口信号 通用数字 I/O 通用数字输入口 通用数字输出口 28路,光电隔离 28路,光电隔离,集电极开路输出 通讯接口协议 北京联合大学 实验报告 课程(项目)名称:过程控制 学院:自动化学院专业:自动化 班级:0910030201 学号:2009100302119 姓名:张松成绩: 2012年11月14日 实验一交通灯控制 一、实验目的 熟练使用基本指令,根据控制要求,掌握PLC的编程方法和程序调试方法,掌握交通灯控制的多种编程方法,掌握顺序控制设计技巧。 二、实验说明 信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始工作,按以下规律显示:按先南北红灯亮,东西绿灯亮的顺序。南北红灯亮维持25秒,在南北红灯亮的同时东西绿灯也亮,并维持20秒;到20秒时,东西绿灯闪亮,闪亮3秒后熄灭。在东西绿灯熄灭时,东西黄灯亮,并维持2秒。到2秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮。东西红灯亮维持25秒,南北绿灯亮维持20秒,然后闪亮3秒后熄灭。同时南北黄灯亮,维持2秒后熄灭,这时南北红灯亮,东西绿灯亮……如此循环,周而复始。如图1、图2所示。 图 1 图 2 三、实验步骤 1.输入输出接线 输入SD 输出R Y G 输出R Y G I0.4 东西Q0.1 Q0.3 Q0.2 南北Q0.0 Q0.5 Q0.4 2.编制程序,打开主机电源编辑程序并将程序下载到主机中。 3.启动并运行程序观察实验现象。 四、参考程序 方法1:顺序功能图法 设计思路:采用中间继电器的方法设计程序。这个设计是典型的起保停电路。 方法2:移位寄存器指令实现顺序控制 移位寄存器位(SHRB)指令将DATA数值移入移位寄存器。S_BIT指定移位寄存器的最低位。N指定移位寄存器的长度和移位方向(移位加=N,移位减=-N)。SHRB指令移出的每个位被放置在溢出内存位(SM1.1)中。该指令由最低位(S_BIT)和由长度(N)指定的位数定义。 目录 PMAC控制卡学习(硬件) (3) 第一章 PMAC简介 (3) 1.1 PMAC的含义和特点 (3) 1.2 PMAC的分类及区别 (4) 1.2.1 PMAC的分类 (4) 1.2.2 PMAC 1型卡与2型卡的主要区别 (4) 第二章Turbo PMAC Clipper控制器硬件配置 (5) 2.1 Turbo PMAC Clipper控制器简介 (5) 2.2 Turbo PMAC Clipper硬件配置 (5) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (5) 2.2.2 Turbo PMAC Clipper控制器可选附件 (8) 2.2.2.1 轴接口板 (8) 2.2.2.2 反馈接口板 (9) 2.2.2.3 数字I/O接口板 (9) 第三章 Turbo PMAC Clipper设备连接 (9) 3.1 板卡安装 (9) 3.2 控制卡供电 (10) 3.2.1 数字电源供电 (10) 3.2.2 DAC(数字/模拟转换)输出电路供电 (10) 3.2.3 标志位供电 (10) 3.3 限位及回零开关 (10) 3.3.1 限位类型 (11) 3.3.2 回零开关 (11) 3.4电机信号连接 (11) 3.4.1增量式编码器连接 (11) 3.4.2 DAC 输出信号 (12) 3.4.3 脉冲&方向(步进)驱动 (12) 3.4.4 放大器使能信号(AENAn/DIRn) (13) 3.4.5 放大器错误信号(FAULT-) (13) 3.4.6 可选模拟量输入 (13) 3.4.7 位置比较输出 (14) 3.4.8 串行接口(JRS232) (14) 3.5 设备连接示例 (14) 3.6 接口及指示灯定义 (16) 3.7 跳线定义 (19) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (23) 附件 (26) 1.接口各针脚定义 (26) 2. 电路板尺寸及孔位置 (35) PMAC控制卡学习(硬件) 第一章 PMAC简介 1.1 PMAC的含义和特点 1.PMAC的含义: 2. VC 编程示例 2.1 准备工作 (1) 新建一个项目,保存为“ VCExample.dsw ”; (2) 根据前面讲述的方法,将静态库“ 8840.lib ”加载到项目中; 2.2 运动控制模块 (1) 在项目中添加一个新类,头文件保存为“ CtrlCard.h ”,源文件保存为“ CtrlCard.cpp ”; (2) 在运动控制模块中首先自定义运动控制卡初始化函数,对需要封装到初始化函数中的库函数进行初始化; (3) 继续自定义相关的运动控制函数, 如:速度设定函数,单轴运动函数,差补运动函数等; (4) 头文件“ CtrlCard.h ”代码如下: # ifndef __ADT8840__CARD__ # define __ADT8840__CARD__ 运动控制模块 为了简单、方便、快捷地开发出通用性好、可扩展性强、维护方便的应用系统,我们在控制卡函数库的 基础上将所有库函数进行了分类封装。下面的示例使用一块运动控制卡 ****************************************************** #define MAXAXIS 4 //最大轴数 class CCtrlCard { public: int Setup_HardStop(int value, int logic); int Setup_Stop1Mode(int axis, int value, int logic); (设置stop1 信号方式) int Setup_Stop0Mode(int axis, int value, int logic); (设置stop0 信号方式) int Setup_LimitMode(int axis, int value1, int value2, int logic); (设置限位信号方式) int Setup_PulseMode(int axis, int value); (设置脉冲输出方式) int Setup_Pos(int axis, long pos, int mode); (设置位置计数器) int Write_Output(int number, int value); (输出单点函数) int Read_Input(int number, int &value); (读入点) int Get_CurrentInf(int axis, long &LogPos, long &ActPos, long &Speed); (获取运动信息) int Get_Status(int axis, int &value, int mode); (获取轴的驱动状态) int StopRun(int axis, int mode); (停止轴驱动) int Interp_Move4(long value1, long value2, long value3, long value4); (四轴差补函数) int Interp_Move3(int axis1, int axis2, int axis3, long value1, long value2, long value3); (三轴差补函数) int Interp_Move2(int axis1, int axis2, long value1, long value2); (双轴差补函数) int Axis_Pmove(int axis ,long value); (单轴驱动函数) int Axis_Cmove(int axis ,long value); (单轴连续驱动函数) int Setup_Speed(int axis ,long startv ,long speed ,long add ); (设置速度模块) int Init_Board(int dec_num); (函数初始化) (设置速度模块) CCtrlCard(); (定义了一个同名的无参数的构造函数) int Result; // 返回值 }; #endif 基于PLC的车库自动门控制系统的设计 摘要:由于PLC所有的控制功能都是以程序的形式来体现的,因此PLC的应用已早期的开关逻辑到现在工业的各个领域,它既可用于开关量控制,又可以用于模拟量控制,既可用于单机控制,又可用于组成多级控制系统。本文主要分析PLC控制系统设计的一般步骤和内容,并针对公共车库自动门控制系统进行设计。 关键词:PLC 车库自动门 PLC系统和继电器系统类似,也是由输入部分、逻辑部分和输出部分组成。输入部分收集并保存被控制部分实际运行的数据。逻辑部分处理输人部分所取得的信息,并判断那些功能需做出相应的输出反应。输出部分控制正在被控的各装置中,哪几个设备需要实时操作处理。PLC采用大规模集成电路构成的微处理器和存储器来组成逻辑部分。尽管逻辑部分的作用与继电器控制系统类似,但是其组成、工作原理和运行方式是完全不同的[1]。本文以下主要分析基于PLC的小区公共车库自动门控制系统的设计。 1公共车库自动自动门控制概述 1.1自动门控制装置 自动门控制装置由门内红外探测开关GDl、门外红外探测开关GD2、开门限位开关SQ1、关门限位开关SQ2、开门执行机构KMl(控制电动机正转)、关门执行机构KM2(控制电动机反转)等部件组成。要求: ①当有人由内到外出门或由外到内进门时,电动机正转,门自动打开,开门到位时,限位开关SQ1发出信号,电动机自动停止运行。 ②自动门在开门位置停留5s后,自动进入关门程序。电动机反转,门自动关闭,关门到位时,限位开关SQ2发出信号,电动机停止运行。 ③在关门过程中,当有人员由外到内或由内到外通过大门时,必须立即停止关门动作,并自动进入开门程序。 ④在门打开后的5s等待时间内,若又有人员由外至内或由内至外通过大门时,系统必须重新等待5s后,再进入关门过程,以保证人员安全通过。 1.2小区公共车库自动门控制要求 当汽车到达车库门前,超声波开关接收到车来的信号,开门上升;当升到顶点碰到上限开关,门停止上升;当汽车驶入车库后,光电开关发出信号。门电动机反转,门下降;当下降碰到下限开关后,门电动机停止[2]。 nMotion运动控制卡使用手册 nMotion控制卡特点: 支持Mach3所有版本,包括目前最新版本. 支持所有Windows版本,包括Windows8 USB无需驱动,所有Windows版本即插即用,支持热插。 USB总线采用高档芯片磁耦隔离,真正有价值的隔离,不同于一般控制卡的光耦隔离输入输出,做到了超可靠性,绝对保证电脑USB的安全。同时保证的超强的EMC抗干扰能力。 单芯片,系统更精减,比一般的又芯片处理方式稳定性高出不知多少倍。 双核超高速CPU(单核最高主频204MHz),运算处理能力有极大冗余。并保证实现4轴联动下500KHz的脉冲输出频率,6轴联动的脉冲输出频率最高达300KHz,可接伺服/步进。 运动控制缓冲大小可设,保证最快插补周期也能稳定运行,电脑运行负荷过重时也能平稳运行。 拥有16路输入口,输入接口更简单,端口干湿接点均可,接线更为简单,干接点方法只要外部接一个物理开关到地线即可,所有16路输入口都有信号指示,为低电平时指示灯亮,调试简单明了。 拥有8路输出口,单路输出驱动能力500mA,可直接驱动直流继电器 PWM调速输出端口,可设PWM频率,0~1000连续可调 拥有测速功能,主轴实际转速在Mach3界面中实时显示,测量精准稳定。 电路板由工程师精心打造,设计水平一目了然。 带有256字节NVRAM空间,可保存6个轴的座标值,下次上电无需找零点。 目录 nMotion运动控制卡使用手册 (1) nMotion控制卡特点: (1) 目录 (2) 外观及安装孔机械尺寸: (5) 1 Mach3的软件安装 (6) 1.1安装准备 (6) 1.2 USB电缆的准备 (6) 1.3运动控制卡的软件安装 (7) 2 Mach3的软件配置 (8) 3.运动控制卡的硬件安装 (11) 3.15轴输出信号 (11) 3.2 16个输入端子(Input Port)引脚位置图 (12) 3.3 8路控制输出端子引脚位置图: (13) 4. 引脚功能描述 (14) 4.1 5轴输出端子(Axis Output Port )引脚功能描述 (14) 4.2 16 个输入端子(Input Port)引脚功能描述 (14) 4.3 输出端子(Out Port)引脚功能描述: (15) 5 USB运动控制卡的接线图 (16) 5.1 X、Y、Z、A、B轴输出 (16) 5.2 输入端口 (18) 5.3 各类规格传感器的接线和配置方法 (19) 5.4 输出端口 (20) 6 外部倍率旋钮 (21) 7 主轴调速PWM模拟量输出 (23) 7.2 主轴调速模拟输出接口原理图 (26) 7.3 主轴输出接线图(通用变频器的接线图) (27) 8 主轴测速 (27) 8.1 nmotion控制卡配置对话框 (27) 8.2 主轴转速显示 (28) 自动门及其控制系统简介 摘要:门是伴随着人们的文明而诞生的,随着科学的发展,门的种类越来越多,技术也越来越复杂。自动门从理论上理解应该是门的使用观念的延伸,是人们根据需要对门的功能的提升和完善。所以对自动门的认识应该从人对门功能的要求开始。作为建筑物一部分的门,从最基本的意义上讲,要同时满足隔离外部环境和不妨碍人的通行这两种要求。因此门体本身应牢固、密封。 自动门是随着人们对生活条件的不断追求、科技的不断发展应运而生的高科技产品,因此,它具备了普通门所没有的优势:雅观漂亮,而且使用管理起来更加的安全、方便、舒适,通电后可以实现无人看管,同时又可节约空调能源、防风、防尘、降低噪音,既方便又提高了建筑的档次。因此自动门被广泛的应用于大型商场、银行、大酒店、机场、办公大厦等各种大型的公共场所。 本文通过结合PLC控制系统的简介及各种普遍应用的自动门的特点,对由PLC 作为控制系统的自动门的概况、主要分类、组成、原理、软硬件控制系统、PLC 程序的编写等都进行了一定的介绍。 关键词:自动门;PLC;控制;编程 Abstract: The door is accompanied by the birth of human civilization, with the development of science, the types of doors more and more, technology is more complex. Automatic doors from the theoretical understanding of the concept should be an extension of the use of the door, door people as needed to enhance and improve the function. Therefore, the understanding of the automatic door to door should be functional requirements from the beginning people. As part of the building door, from the most basic sense, isolated from the external environment to meet people and do not hinder the passage of these two requirements. Thus door itself should be firmly sealed. Automatic door is the living conditions as people continue to pursue the development of science and technology came into being in the high-tech products, so it does not have the advantages of ordinary doors: decency beautiful, but it is more secure use and management, convenience, Comfort, power can be achieved after the unattended while at the same energy saving air conditioning, wind, dust, noise reduction, convenient and improve the grade of the building. Therefore, automatic doors are widely used in large shopping malls, banks, large hotels, airports, office buildings and other large public places. In this paper, combined with PLC control system and a variety of widely used RNR精简型USB运动控制卡 MACH3专用版 V2.0 安装使用说明书 RNR RobotTech, 2010 目录 功能概览 (5) 外观及尺寸 (7) 接口示意图 (7) 安装尺寸图 (8) 初次使用 (8) 脉冲输出 (11) 连接(步进/伺服)电机驱动器 (11) 差分方式 (11) 单端方式 (12) 从属轴设置 (13) 其他说明 (14) 信号输入 (15) 输入信号的接线 (16) 急停按钮 (18) 限位开关 (19) 自动回原点 (21) 从属轴的自动回原点 (25) 自动对刀 (25) 自动刀具清零 (28) 自动寻边 (29) 寻中心 (31) 手轮接口 (32) 手轮接线 (33) Mach3的手轮设置 (34) 手轮接口作为扩展的信号输入 (36) 信号输出 (39) 信号输出的接线 (39) 主轴电机控制 (40) 继电器方式 (41) PWM方式 (42) 其他信号输出 (45) 警告: 由运动控制卡控制的机械设备,具有极强的专业性。对操作人员的知识及素质有特殊要求。若设备设计或使用不当,自动设备会具有一定的危险性和破坏性,请确保设计和使用的安全以及遵守相关法规法则,如果不确定,请咨询相关专家而不要冒险。 首次使用者、对本产品或Mach3软件性能不熟悉者,在试验本产品时,请确保机械设备的电源开关在手边并能迅速切断电源。 强烈建议使用者安装急停按钮并保证按钮功能正常。 本公司以"如其所示"的方式提供其产品和服务,对使用本公司产品造成的任何直接/间接人身伤害和财产损失不承担责任。 功能概览 RNR精简型USB运动控制卡专用于Mach3软件。其功能及特点如下: ●支持最多4轴联动控制。其中第4轴可以设为从动轴 ●输出脉冲100K,采用最小误差插补算法,加工精度高 ●USB接口,适用任何具有USB接口的上网本,笔记本,台式 机以及平板等PC兼容计算机 ●免驱动设计,能够更好地兼容各种软硬件环境(支持WinXP 及WIN7系统) ●支持自动回原点(回零) ●从动轴在回原点时自动调平 ●支持自动对刀 ●支持急停输入 ●支持限位开关接入 ●支持主轴控制(PWM方式及继电器方式) ●提供4路带光耦隔离数字信号输入 ●最多提供12路数字信号输入 ●提供4路带光耦隔离继电器输出 ●支持手轮接口运动控制卡设计步骤
自动控制系统及应用
PMAC多轴运动控制卡学习(硬件)
自动门控制系统的设计
维宏维鸿四轴真四轴联动雕刻机运动控制卡说明书word版本
自动控制系统管理
PMAC多轴运动控制卡学习(硬件)
【自动化】门控制系统的设计
运动控制卡概述
自动控制系统案例分析
MC多轴运动控制卡学习硬件
运动控制卡C程序示例
基于PLC的车库自动门控制系统的设计
nMotion运动控制卡使用手册2.0
基于PLC自动门控制系统设计的文献综述(自动门及其控制系统简介)
RNR精简型USB运动控制卡使用说明