库卡机器人PROFIBUS配置方法
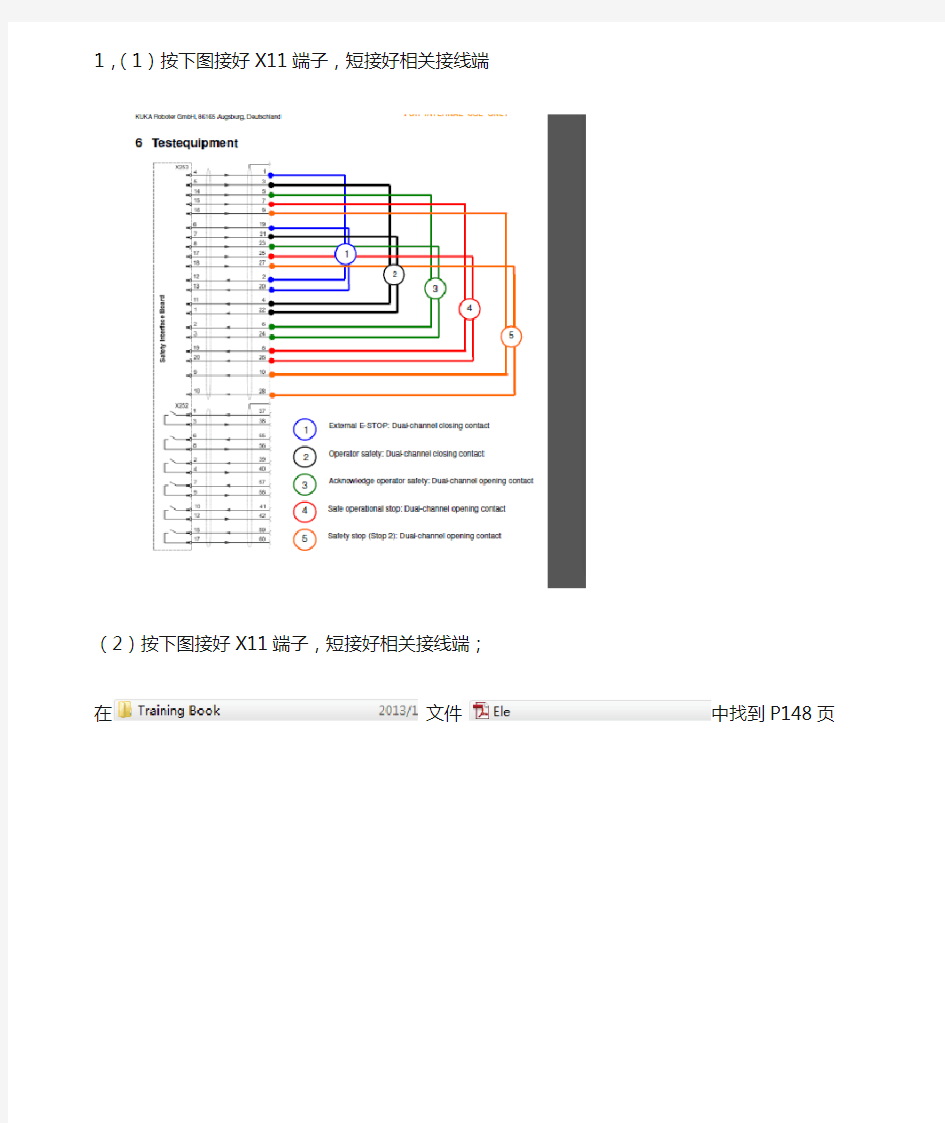

1,(1)按下图接好X11端子,短接好相关接线端
(2)按下图接好X11端子,短接好相关接线端;
在文件
中找到P148页
2,提示报警,在控制柜里面检查有一条电源线没有插
3,在机器人示教器上查找机器人IP地址,然后设置电脑本地连接的IP,让软件与机器人通讯连接起来(查看连接状态:CMD—PING_IP地址)4,通过软件从机器人控制柜中读取配置
然后将读取的项目“另存与”一个指定的文件夹。
5,关闭读取的项目,如图
在中插入GSD文件
如
需要把外挂的I/O模块配置好6,打开读取的项目中,如图,
然后双击“”会出现“”控制器被激活。
7,先配置EL1809输入部分。IN[1]到IN[16]对应16点输入
后配置EL2809输出部分。OUT[1]到OUT[16]对应16点输出;
8,在依次配置EL6731-0010输入输出
注意把8位编组为一个字节,一次编组,从IN[17]和OUT [17]开始,最后连接起来。
9,下载项目
在下载过程中若出现下载报警,可以在示教器上激活要下载的项目即可
10,设置PROFIBUS地址
双击,然后填写地址
然后点击APPLY, OK
11,在中添加8个字节,即4个字的输入/输出
12在PLC中配置网络及地址,
当机器人与PLC通讯正常后,建立变量表
在示教器上可以监视强制相关数字信号,还可以在示教器上强制OUT[1]-OUT[16]会发现EL1809模块亮灯;
(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。可复制、编制,期待你的好评与关注)
相关主题