八炉温控制系统的设计
实验八 炉温控制系统的设计
一、设计目的
1、了解被控对象数学模型建立的方法;
2、掌握PID 控制的基本原理; 4、掌握PID 参数整定的两种方法;
3、掌握Matlab/Simulink 在控制系统设计中的应用。 二、设计要求
电炉是一个特性参数随炉温变化的被控对象,炉温控制具有单向性、大惯性、大滞后、时变性的特点。设计PID 控制器,当系统处于平衡状态时,通过调节PID 控制器的比例系数p K 、积分时间系数i T 和微分时间D τ,炉温稳定在给定值,从而实现了电炉的温度控制。 三、设计任务
3.1电炉数学模型
一般将电阻炉视为一阶惯性环节加滞后的对象,其传递函数为s e Ts K s G τ-+=
1
)(。
其中:T 为电炉的时间常数,T=RC (C 为电炉热容,R 为热阻);K 为比例系数;τ为纯滞后时间,单位s ;S 为复频域连续函数。系数T 、K 、S 对于不同的被控对象,其数值有所不同。现有一台50kW 箱式电阻炉,其T=360、K=8、τ=180s 。
3.2电炉控制系统框图
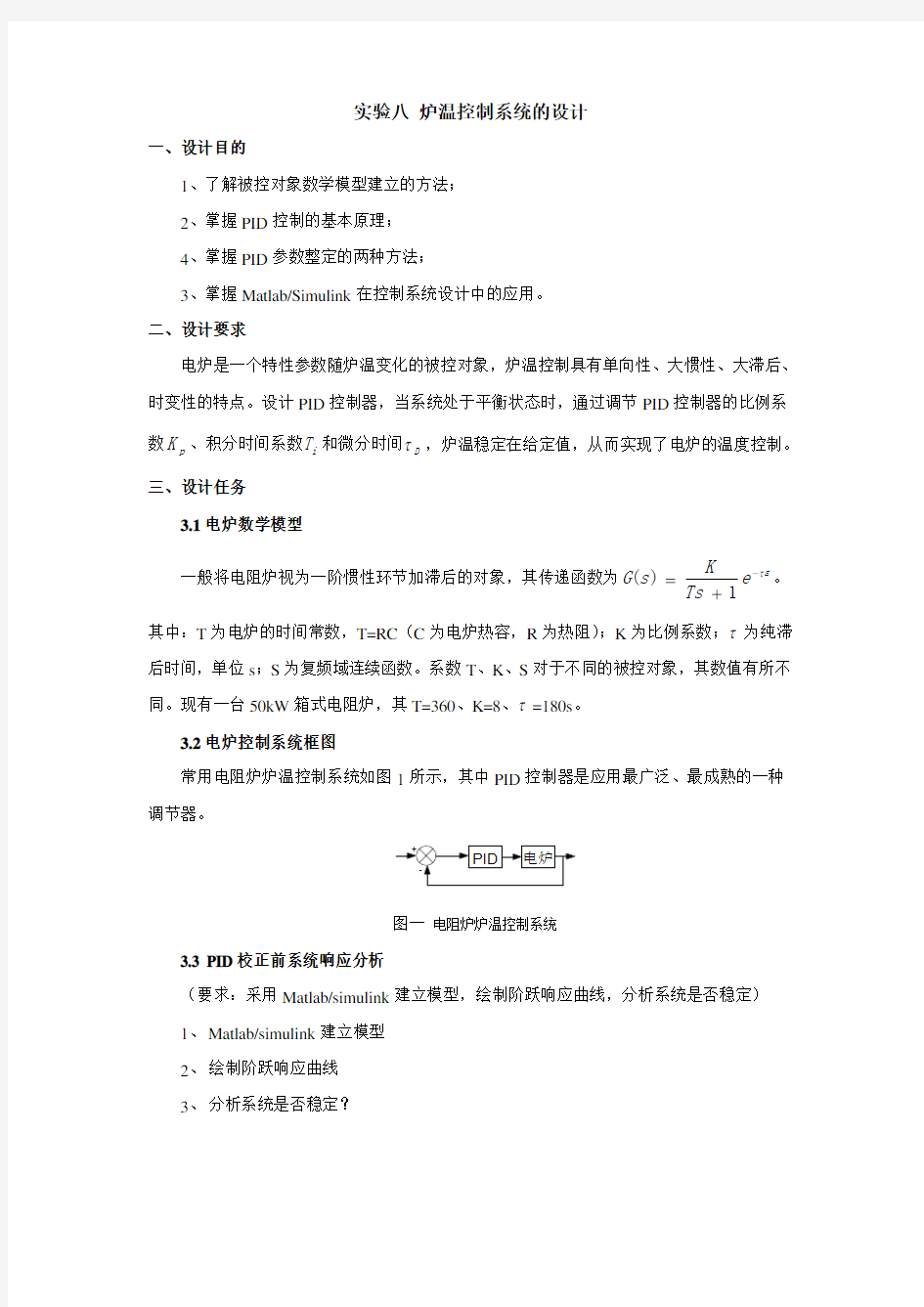
常用电阻炉炉温控制系统如图1所示,其中PID 控制器是应用最广泛、最成熟的一种调节器。
图一 电阻炉炉温控制系统 3.3 PID 校正前系统响应分析
(要求:采用Matlab/simulink 建立模型,绘制阶跃响应曲线,分析系统是否稳定) 1、 Matlab/simulink 建立模型 2、 绘制阶跃响应曲线 3、 分析系统是否稳定?
3.4 PID 控制器设计
PID 控制器的传递函数为)1
1()(s s
T K s G D i p c τ++=,其中,p K 为比例常数,i T 为
积分时间常数,D τ为微分时间常数。
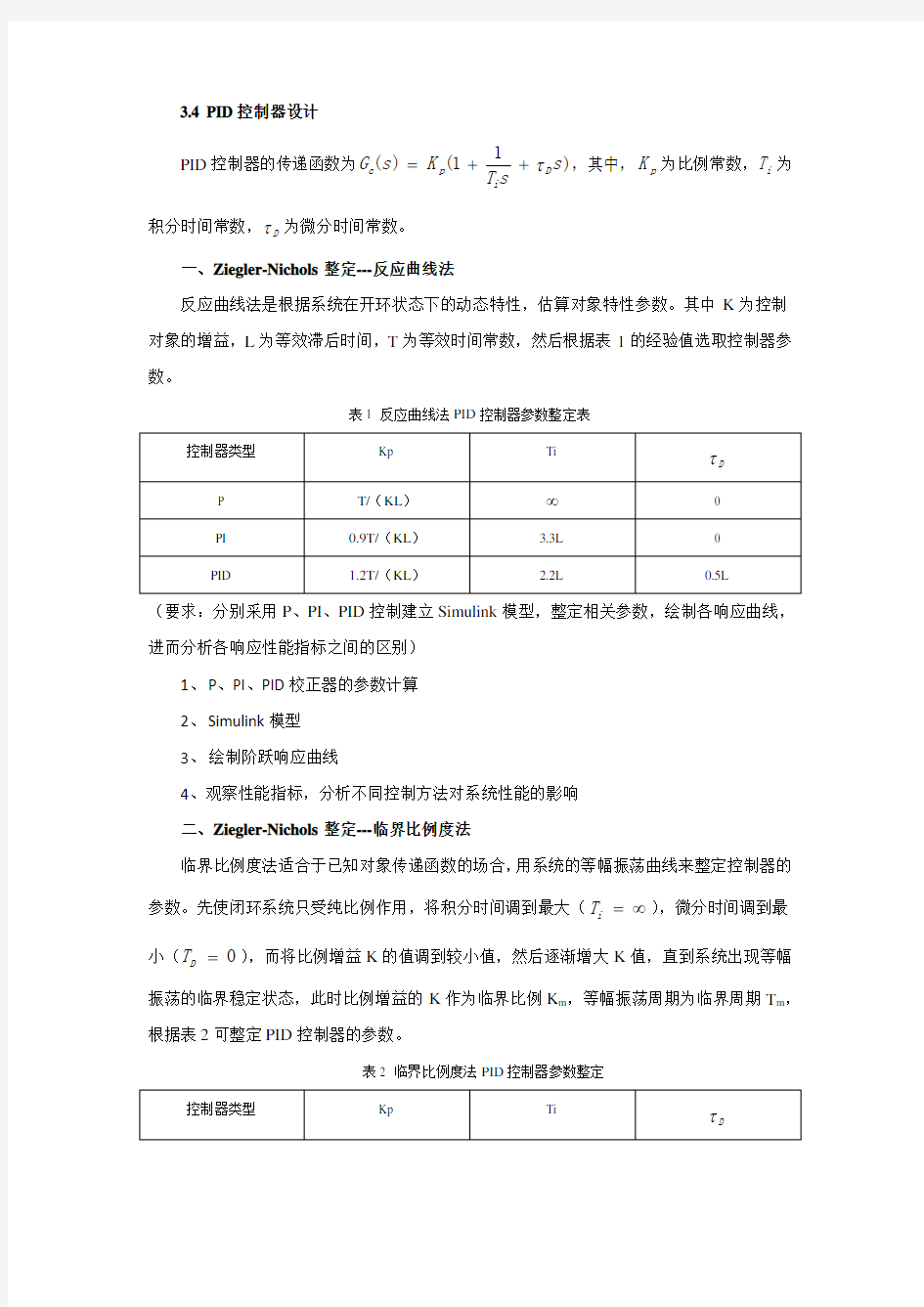
一、Ziegler-Nichols 整定---反应曲线法
反应曲线法是根据系统在开环状态下的动态特性,估算对象特性参数。其中K 为控制 对象的增益,L 为等效滞后时间,T 为等效时间常数,然后根据表1的经验值选取控制器参数。
表1 反应曲线法PID 控制器参数整定表
(要求:分别采用P 、PI 、PID 控制建立Simulink 模型,整定相关参数,绘制各响应曲线,进而分析各响应性能指标之间的区别)
1、 P 、PI 、PID 校正器的参数计算
2、 Simulink 模型
3、 绘制阶跃响应曲线
4、观察性能指标,分析不同控制方法对系统性能的影响 二、Ziegler-Nichols 整定---临界比例度法
临界比例度法适合于已知对象传递函数的场合,用系统的等幅振荡曲线来整定控制器的参数。先使闭环系统只受纯比例作用,将积分时间调到最大(∞=i T ),微分时间调到最小(0=D T ),而将比例增益K 的值调到较小值,然后逐渐增大K 值,直到系统出现等幅振荡的临界稳定状态,此时比例增益的K 作为临界比例K m ,等幅振荡周期为临界周期T m ,根据表2可整定PID 控制器的参数。
表2 临界比例度法PID 控制器参数整定
(要求:分别采用P、PI、PID控制建立simulink模型,整定相关参数,绘制各响应曲线,进而分析各响应性能指标之间的区别)
1、P、PI、PID校正器的参数计算
2、Simulink模型
3、绘制阶跃响应曲线
4、观察性能指标,分析不同控制方法对系统性能的影响
三、不同整定方法PID控制比较
(要求:采用PID控制,分别通过比较反应曲线法和临界比例度法整定参数,绘制各响应曲线,通过分析各响应性能指标之间的区别比较两种方法的优缺点。)
1、Simulink模型
2、绘制阶跃响应曲线
3、观察性能指标,分析不同整定方法对系统性能的影响