工业机器人设计(大四机器人课设作业)
“工业机器人”设计大作业
作品题目:货物装卸机器人
专业:机械设计制造及其自动化
姓名:班级:学号:
姓名:班级:学号:
姓名:班级:学号:
指导教师:陈明
1冃IJ言
货物装卸作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。货物装卸机器人可安装不同的末端执行器以完成各种不同形状和状态的工件货物装卸工作,大
大减轻了人类繁重的体力劳动。目前世界上使用的货物装卸机器人愈10万台,被广泛应用
于机床上下料、冲压机自动化生产线、自动装配流水线、码垛货物装卸、集装箱等的自动货
物装卸。部分发达国家已制定出人工货物装卸的最大限度,超过限度的必须由货物装卸机器
人来完成。装卸货物装卸是物流的功能要素之一,在物流系统中发生的频率很高
2设计方案论证
本课题通过对货物装卸机器人工作对象及工作场所的分析研究,深入了解其工作是如何进行,各部分零部件应该如何运行以及如何紧密配合,先确定其总体结构再对主要零部件进行设计计算确定其尺寸大小以及确定电机型号。
2.1基本思想
(1)设计要考虑要求和工作环境的限制。
(2)考虑到货物装卸货物时所需要精确度不是很高,为了简化结构,境地成本,采用角铁焊接结构。(3)为了满足设计要求,须设计三个独立的电机驱动系统,各部分之间通过计算机控制、协调工作。(4)本次设计只是该题目的机械部分,而对应控制部件的考虑较少。
3仓库货物装卸机器人的设计计算
3.1货物装载伸缩装置的设计
3.1.1确定传动方案
我们所学的传动方式有以下几种:带传动、链传动、齿轮传动、蜗轮蜗杆传动和钢丝绳传动等,一般地说,啮合传动传递功率的能力高于摩擦传动;蜗轮传动工作的发热情况较为严重,因而传动的功率不宜过大;摩擦轮传动由于必须有足够的压紧力,故而在传递同一圆周力时,其压轴力比齿轮传动的大几倍,因而不宜用于大功率传动。带传
动具有结构简单,传动平稳,价格低廉和缓冲吸振特点。可是容易磨损松弛,易出现打滑现象;链传动只能实现平行轴间同向传动而且运动时不能保持恒定瞬时传动比;齿轮传动效率高,结构紧凑,工作可靠,寿命长,传动比稳定但是齿轮传动制造及安装精度要求高价格较贵而且不宜用于传动距离过大场合。
此次设计由于机器人用于货物装卸,其货物装卸高度为500mm-2500mm,而且货物架
需要灵活且运动平稳速度不宜过大,综合考虑以上因素本次设计采用蜗轮蜗杆减速器和钢丝
绳传动。
钢丝绳传动是利用摩擦力来传动的,而钢丝绳本身截面为圆型,且钢丝绳本身直径很小,所以导致其摩擦面积很小,这样很不利于摩擦传动。上图中标号1的零件为传动
用钢丝绳磙子,为了克服钢丝绳的摩擦面积小的缺点,将该部分设计成将钢丝绳在磙子上缠绕几圈,以次来增加钢丝绳与磙子之间的接触面积,从而增加了摩擦力,增加了摩擦传动效率。
3.1.2选择电动机的类型与结构
电动机在工业生产中实现生产机械的启动、停止以及速度调节,完成各种生产工艺过程的要求,保证生产过程的正常运行。电动机的型号有多种,主要有以下几种:直流电动机、交流电动机(三相异步电动机、单相异步电动机、同步电动机)、伺服电动机
等。交流电动机与直流电动机相比具有结构简单、制造容易、维护方便、运行可靠,价格便宜,具有较好的稳态和动态特性,因此,它是工业中使用得最为广泛的一种电动机。
由于此次设计的机器人是应用于仓库货物装卸业,而且货物装卸货物最大重量为40 kg,故
而需要一个能够提供足够大动力的电机来提供动力,因此应选用冶金及起重用三相异步电动
机。
3.1.3选择电动机的功率(容量)
依据所选择的电动机额定功率应大于工作机所需的电动机功率
由于考虑到动力设备不能与所货物装卸货物干涉,因此动力设备应尽可能的占用较少面积。因此选用电动机和蜗轮蜗杆整合在一起的动力设备,以此来减少所占用的空间。因此查表可选丫系列三相异步电动机:德国动力设备
GKS05-3MV071-32。
该设备将蜗轮蜗杆减速器和制动设备整合在一起。有效的控制了动力设备所占用的空间。
3.1.4钢丝绳的选用
根据伸缩装置与导轨的摩擦力以及钢丝绳作用种类为牵引及传动,所以选择钢
丝绳种类为点接触钢丝绳,查表可选钢丝绳牌号为6*19。
根据伸缩装置结构布局,查表选择钢丝绳直径为3mm 。
3.1.5钢丝绳磙子的设计
根据伸缩装置的结构及功能需求,可知需要2种钢丝绳磙子。一种为传动作用,一种为导向作用。由于传动用钢丝绳磙子上受钢丝绳的径向载荷,因此设计其直径为16mm,材料选用45号钢。其与磙子支架之间以滑动轴承连接。由于导向用钢丝绳磙子不与钢丝绳有载荷,因此设计其直径为8mm,材料选用45号钢。其与磙
子支架之间以滑动轴承连接。
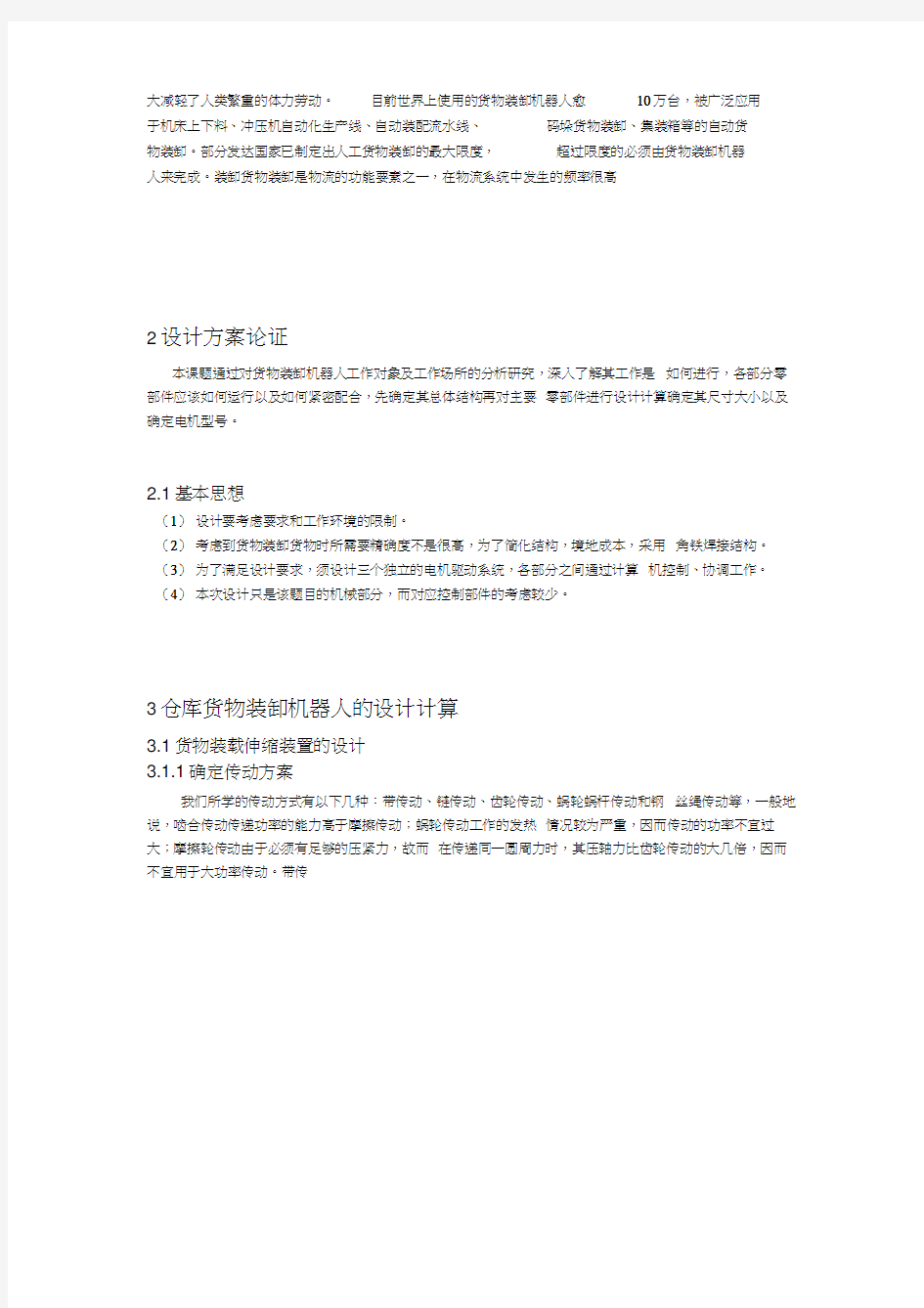
SI3.2货物装载伸縮机构
上图为货物装载伸缩装置的侧视图,其中:
(1)电机减速器(2)钢丝绳(3)货物伸缩托架(4)链板及整体托架(5)
磙子链条
3.2底盘系统的设计
3.2.1确定传动方案
我们所学的传动方式有以下几种:带传动、链传动、齿轮传动、蜗轮蜗杆传动和钢丝绳传动等,一般地说,啮合传动传递功率的能力高于摩擦传动;蜗轮传动工作的发热情况较为严重,因而传动的功率不宜过大;摩擦轮传动由于必须有足够的压紧力,故而在传递同一圆周力时,其压轴力比齿轮传动的大几倍,因而不宜用于大功率传动。带传动容易磨损松弛易出现打滑现象;齿轮传动制造及安装精度要求高价格较贵而且不宜用于传动距离过大场合;链传动与摩擦型带传动相比,链传动无弹性滑动和整体打滑现象,因而能保持准确的平均传动比,传动效率高;又因为链不需要像带那样张得很紧,故而作用于轴上的径向压力较小;链
条采用金属材料制造,在同样的使用条件下,链传动的整体尺寸较小,结构比较紧凑,多用于低速重载。综合考虑以上因素本次设计采用蜗杆减速和链传动。
322选择电动机的类型与结构
电动机在工业生产中实现生产机械的启动、停止以及速度调节,完成各种生产工艺过程的要求,保证生产过程的正常运行。电动机的型号有多种主要有以下几种:直流电动机、交流电动机(三相异步电动机、单相异步电动机、同步电动机)、伺服
电动机等。交流电动机与直流电动机相比具有结构简单、制造容易、维护方便、运行可靠,价格便宜,具有较好的稳态和动态特性,因此,它是工业中使用得最为广泛的一种电动机。由于此次设计的机器人是应用于仓库货物装卸业而且货物装卸货物最大重量为40 kg,故而需要一个能够提供足够大动力的电机来提供动力,因此综上所述选用冶金及起重用三相异步电动机。
3.2.3选择电动机的功率(容量)
依据所选择的电动机额定功率应大于工作机所需的电动机功率即:
式中化——电动机额定功率.单位为KW;
P,——工作机所需的电动机功率,单位为RW;
已知P, ^2Kw o
所需电动机功率由下式计算:
P丄
式中巴一一工作机所需有效功率,由工作机的工艺Ifl力及运行参数确定。n——电动机到工作机的总效率克
P 7
P r =-------- ——== 2 刖曲
// L仏…打小 0.67
可~昨撇W琏'% *林
式中n一一传动装置的总效率。
他一一为涡轮蜗杆传动效率"其大小为6概
%——为44传动儒动效率,拡大小为99监
可g—为滚动粧承传动效率,苴大小为99曜
张——为联轴器传动效率,其大小为99%*
査表可选Y系列三相异步电动机:德国动力设备DV132S6, 额定功率£严3畑亠2?98Kw
32.4确定电机转速
车轮幣連?. - 60Xnin斤=】°?12 h-1-5^2
口二(15~ 24)<60=900-1400
符合这一范围的同步转速为iooo^iin
电机圭要性能参数如下所示
表3 1电机主要性能螯数
Ttible 3.1 rhe origin perforiiKince piiraii^ters of lhe rrtoior
Pg}厶")号叹
r.£.w-xlO'4)毛鱼
(心)
(TV ?用)
7.6 0.7 2.2 L87.
2
15b3
3.2.5计算传动装這的总传动比和分配各级传动比
<1)传动装置总传动比为:
电机主轴转連-
九——车轮主轴转速◎
<2)分配借动装置各级传动比’
式中4——减速器的传动比*
J -一链轮的传动比*
减速器选用蜗轮蜗杆减速器型号*KWL100o传动比i b =12-5 . 申心距? =,额定输入功率3.44K%额定输出梓距378. 4N
3. 2, 6计算传动装置的运动和动力参数
(1)计算各轴转速
叫——电动机綸出转速°
窝速器域出转电