二自由度控制方法研究综述
二自由度控制方法研究综述*
张井岗
太原重型机械学院自动化系,太原030024
摘要:本文总结了二自由度PID 控制的原理、几种主要的二自由度控制器的设计方法和二自由度控制与其它一些控制方法的结合。最后提出二自由度控制发展的前景和可以继续深入研究的方向。
关键字:二自由度控制、PID 控制
Study of Two Degree-of-Freedom Control Method----Survey
Zhangjing gang
Department of automation, Taiyuan Heavy Machinery Institute, Taiyuan 030024
Abstract :This paper summarized the principle of two-degrees-of-freedom control (TDF) PID control ,several major design methods of the TDF controller ,the combination of TDF control and other control strategy are explained in detail. Finally ,this paper points out the prospect of TDF control and suggest the direction of the further study of TDF control too.
Key words: Two-Degrees-of-Freedom control ,PID control
1引言
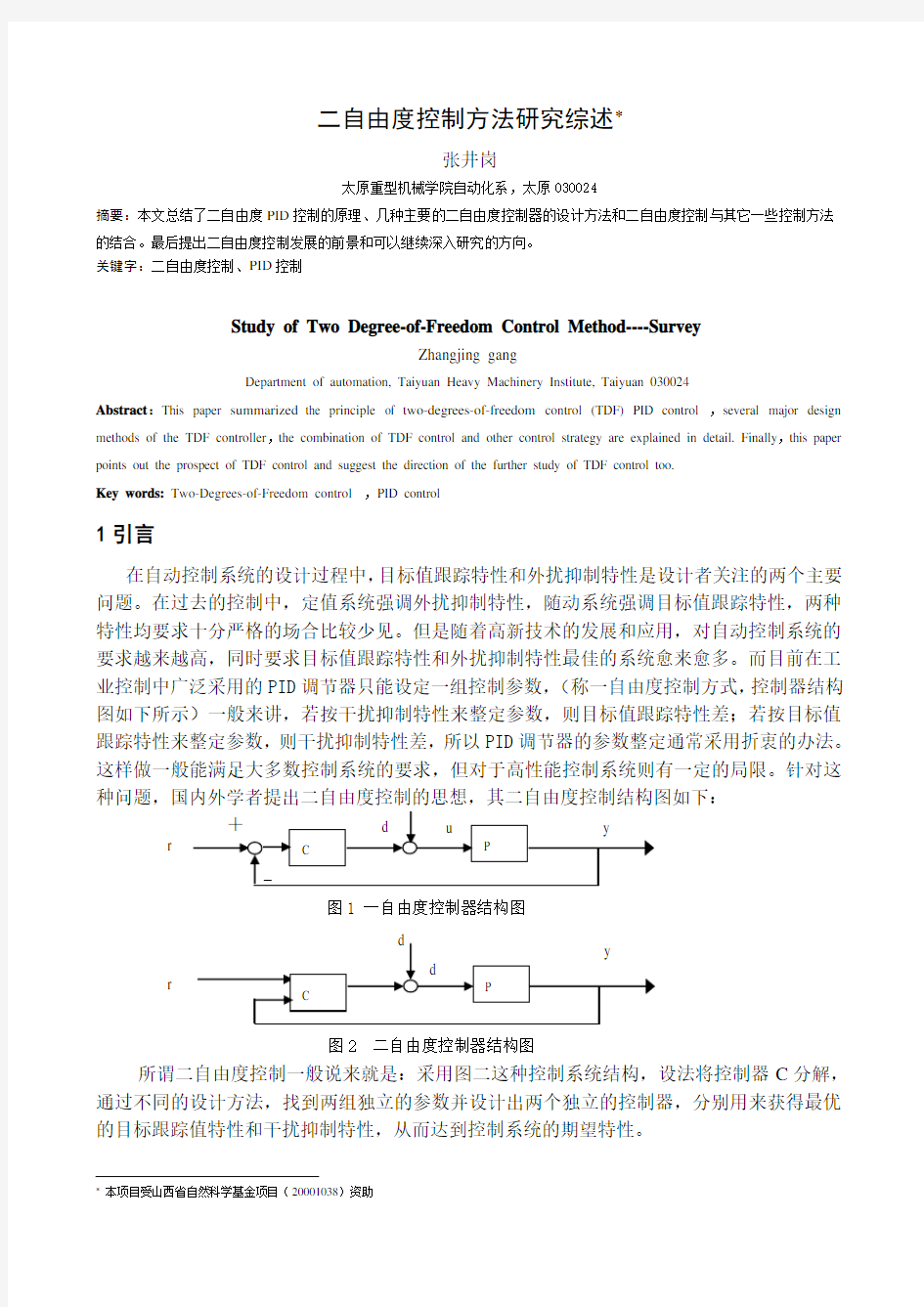
在自动控制系统的设计过程中,目标值跟踪特性和外扰抑制特性是设计者关注的两个主要问题。在过去的控制中,定值系统强调外扰抑制特性,随动系统强调目标值跟踪特性,两种特性均要求十分严格的场合比较少见。但是随着高新技术的发展和应用,对自动控制系统的要求越来越高,同时要求目标值跟踪特性和外扰抑制特性最佳的系统愈来愈多。而目前在工业控制中广泛采用的PID 调节器只能设定一组控制参数,(称一自由度控制方式,控制器结构图如下所示)一般来讲,若按干扰抑制特性来整定参数,则目标值跟踪特性差;若按目标值跟踪特性来整定参数,则干扰抑制特性差,所以PID 调节器的参数整定通常采用折衷的办法。这样做一般能满足大多数控制系统的要求,但对于高性能控制系统则有一定的局限。针对这
图1 一自由度控制器结构图
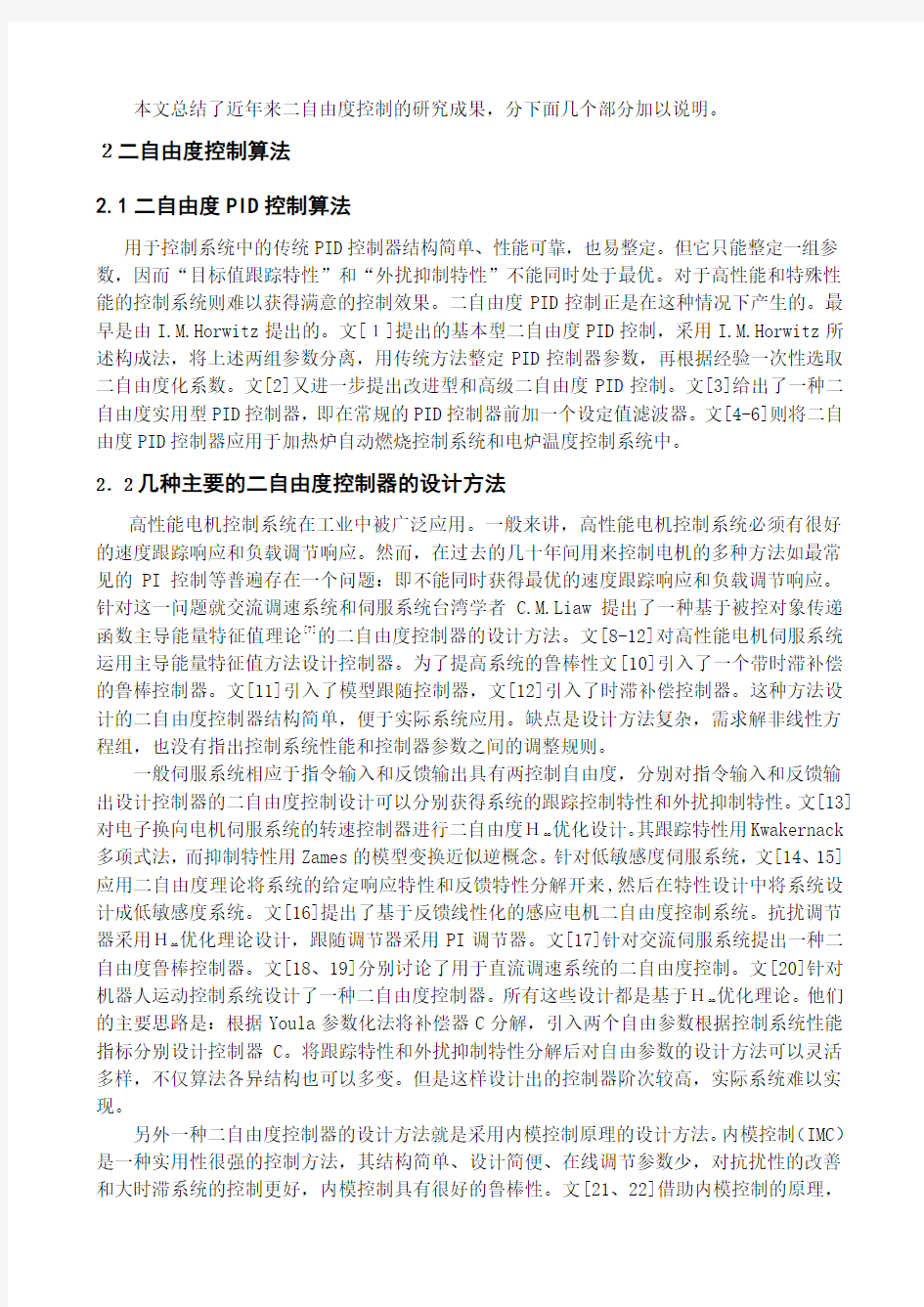
图2 二自由度控制器结构图 所谓二自由度控制一般说来就是:采用图二这种控制系统结构,设法将控制器C 分解,通过不同的设计方法,找到两组独立的参数并设计出两个独立的控制器,分别用来获得最优的目标跟踪值特性和干扰抑制特性,从而达到控制系统的期望特性。
* 本项目受山西省自然科学基金项目(20001038)资助
r r
本文总结了近年来二自由度控制的研究成果,分下面几个部分加以说明。
2二自由度控制算法
2.1二自由度PID控制算法
用于控制系统中的传统PID控制器结构简单、性能可靠,也易整定。但它只能整定一组参数,因而“目标值跟踪特性”和“外扰抑制特性”不能同时处于最优。对于高性能和特殊性能的控制系统则难以获得满意的控制效果。二自由度PID控制正是在这种情况下产生的。最早是由I.M.Horwitz提出的。文[1]提出的基本型二自由度PID控制,采用I.M.Horwitz所述构成法,将上述两组参数分离,用传统方法整定PID控制器参数,再根据经验一次性选取二自由度化系数。文[2]又进一步提出改进型和高级二自由度PID控制。文[3]给出了一种二自由度实用型PID控制器,即在常规的PID控制器前加一个设定值滤波器。文[4-6]则将二自由度PID控制器应用于加热炉自动燃烧控制系统和电炉温度控制系统中。
2.2几种主要的二自由度控制器的设计方法
高性能电机控制系统在工业中被广泛应用。一般来讲,高性能电机控制系统必须有很好的速度跟踪响应和负载调节响应。然而,在过去的几十年间用来控制电机的多种方法如最常见的PI控制等普遍存在一个问题:即不能同时获得最优的速度跟踪响应和负载调节响应。针对这一问题就交流调速系统和伺服系统台湾学者 C.M.Liaw提出了一种基于被控对象传递函数主导能量特征值理论[7]的二自由度控制器的设计方法。文[8-12]对高性能电机伺服系统运用主导能量特征值方法设计控制器。为了提高系统的鲁棒性文[10]引入了一个带时滞补偿的鲁棒控制器。文[11]引入了模型跟随控制器,文[12]引入了时滞补偿控制器。这种方法设计的二自由度控制器结构简单,便于实际系统应用。缺点是设计方法复杂,需求解非线性方程组,也没有指出控制系统性能和控制器参数之间的调整规则。
一般伺服系统相应于指令输入和反馈输出具有两控制自由度,分别对指令输入和反馈输出设计控制器的二自由度控制设计可以分别获得系统的跟踪控制特性和外扰抑制特性。文[13]
优化设计。其跟踪特性用Kwakernack 对电子换向电机伺服系统的转速控制器进行二自由度H
∞
多项式法,而抑制特性用Zames的模型变换近似逆概念。针对低敏感度伺服系统,文[14、15]应用二自由度理论将系统的给定响应特性和反馈特性分解开来,然后在特性设计中将系统设计成低敏感度系统。文[16]提出了基于反馈线性化的感应电机二自由度控制系统。抗扰调节优化理论设计,跟随调节器采用PI调节器。文[17]针对交流伺服系统提出一种二
器采用H
∞
自由度鲁棒控制器。文[18、19]分别讨论了用于直流调速系统的二自由度控制。文[20]针对机器人运动控制系统设计了一种二自由度控制器。所有这些设计都是基于H
优化理论。他们
∞
的主要思路是:根据Youla参数化法将补偿器C分解,引入两个自由参数根据控制系统性能指标分别设计控制器C。将跟踪特性和外扰抑制特性分解后对自由参数的设计方法可以灵活多样,不仅算法各异结构也可以多变。但是这样设计出的控制器阶次较高,实际系统难以实现。
另外一种二自由度控制器的设计方法就是采用内模控制原理的设计方法。内模控制(IMC)是一种实用性很强的控制方法,其结构简单、设计简便、在线调节参数少,对抗扰性的改善和大时滞系统的控制更好,内模控制具有很好的鲁棒性。文[21、22]借助内模控制的原理,
提出一种二自由度内模控制器的结构。针对实际控制过程的特点,将被控对象分解,通过设计二自由度内模控制器来实现系统的鲁棒控制,并给出了系统性能与参数调节之间的关系。
文[23、24]针对被控对象为线性系统的一般控制系统,提出了基于线性二次型最优控制理论(LQ)的二自由度控制器设计方法。通过优化两个独立的二次型性能指标来获得最优的系统跟踪性能和调节性能。该文在此基础上引入了积分补偿、状态观测器等。此外,文[25]还提出一种二自由度回路成型的控制器设计方法,控制系统中引入了状态观测器、在线阶跃响应模型。
2.3二自由度控制与其他一些控制方法的结合
采用二自由度控制虽能使控制系统性能有所改善,但存在的问题是鲁棒性差。这主要是因为二自由度控制器的参数不能随着操作系统和被控对象的参数的变化而变化。目前人们通过将二自由度控制与其它控制方法相结合来改善系统的鲁棒性。
文[26、27]将二自由度控制方法与模糊控制方法结合起来,用于交流系统的速度控制和伺服系统的位置控制上。为了提高系统鲁棒性,获得更好的目标值跟踪响应,文[26]提出在二自由度控制系统的基础上,在前向通道中引入系统参考模型,在反馈通道中引入模糊控制器。文[27]就速度控制而言提出一种所谓的“二自由度模糊控制器”结构。为了解决引入模糊控制器后使系统在设定点附近波动的问题,还设计了两个PI控制器。
文[28]提出将二自由度控制与自学习能力和计算能力都很强的神经网络相结合的思路。在二自由度控制系统的基础上,通过一个辨识机制实时地将伺服系统的参数辨识出来,做为神经网络的输入,神经网络的输出则做为校正后的二自由度控制器的参数。期望参数和由神经网络估计参数之间的全局误差用梯度下降法使其达到最小。这样二自由度控制器参数就能自适应的变化从而获得期望的目标值跟踪特性和外扰抑制特性。
为了解决二自由度控制的鲁棒性问题,文[29]在二自由度控制中引入滑模控制,将二自由度控制作为内环,非线性控制的滑模控制作为外环。并在直流伺服电机的位置控制中对此控制策略加以验证。
文[30]提出了一种改进的遗传算法,成功的用于二自由度PID参数的智能整定中,并突破了常规调节器参数的限制。以上简要介绍了二自由度控制与其它一些控制方法的结合,它们主要都针对系统鲁棒性的问题提出了一些改进方案,仿真或实验证明是有效的,但是在具体实现时还存在一些问题。
3二自由度控制的其它应用
二自由度控制方法的研究除了上述几个在理论上成熟并在实践中得以应用的方法外,还在时滞系统、连续或离散系统、多变量系统以及二自由度控制器的结构方面有所发展。如文[31]提出了一种二自由度Smith预估器,该文在传统的Smith预估器基础上作了一些修改,显著提高了预估器对参考输入和扰动的调节能力。文[32、33]分别就连续情况和离散情况提出了基于双重准则的二自由度预测控制。文[34]提出一种基于解耦方法的多变量二自由度控
优化控制。制方法,控制器的设计采用两步法。文[35]针对多变量随机系统提出二自由度H
∞
文[36]针对多变量随机系统提出了二自由度前馈和反馈优化控制的策略。文[37]针对时滞效应提出二自由度电流控制方法。文[38]则将二自由度控制应用到高性能轧钢机的速度控制器上。此外文[39]还提出了两种新的二自由度控制器结构。由此可看出,二自由度控制已不局
限在PID控制和高性能电机系统的控制领域,随着对它的进一步研究二自由度控制会日臻完善!
4二自由度控制的发展前景和需要解决的问题
二自由度控制以一种崭新的思路——将目标值跟踪特性和外扰抑制特性分解,分别设计相应的控制器使得这两个主要的性能指标同时达到最优,从而达到期望的控制效果。基于此近年来二自由度控制已应用到多种控制系统中,受到越来越多学者的关注。当然二自由度控制与其它控制方法一样,既有优点又有缺点。国内外许多学者已经注意到可以把二自由度控制和其它一些控制方法结合起来解决目前存在的问题。
无论就二自由度控制理论本身还是在与其它控制方法相结合上都存在许多困难和问题,还需进一步深入研究。文章认为可以从以下几个方面进行研究:(1)二自由度PID控制。可将神经网络与二自由度PID控制相结合,用于PID控制器参数的智能整定。但是将神经网络引入后对神经网络的结构、相应算法及算法的收敛性等都需进一步研究。(2)二自由度控制器与神经网络、模糊控制的结合。C.M.Liaw等人在这方面进行了一些研究,但主要针对交流伺服系统,而且系统构成庞大。所以,简化系统构成、优化算法、推广到其它系统中就成为今后研究的目标。(3)二自由度控制器结构的设计。二自由度控制器结构及其算法直接影响到系统控制的效果,许多学者也针对不同控制系统提出了多种控制器结构,可见控制器的结构仍然是今后研究的一个重点。(4)二自由度控制理论的进一步完善和控制器的解耦方法等。
参考文献
[1]安秋顺,二自由度PID控制,冶金自动化,V ol.16,No.4,1992(译自“计装”)
[2]安秋顺,二自由度PID控制,冶金自动化,V ol.16,No.6,1992(译自“计装”)
[3]李甲申、李福林,简化二自由度实用性PID控制器,冶金自动化,V ol.18,No.1,1994
[4]李甲申、孟庆贤、孙刚等,板坯加热炉二自由度PID自动燃烧控制系统,冶金自动化,V ol.15,No.5,1991
[5]孟庆贤、李甲申,二自由度PID控制及其应用,基础自动化,No.1,1997
[6]李甲申、张力春、李卓,二自由度PID控制器及其在单片机温度控制系统中的应用,冶金自动化,V ol.14,No.5,1990
[7]M.Ouyang,C.M.liaw,C.T.Pan,“Model Reduction by Power Decomposition and Frequency Response Matching,”IEEE Transactions on automatic control ,vol.AC-32,No.1,January,pp.59-62,1987
[8] C.M.liaw,Y.S.Kung,C.M.Wu,“Design and Implementation of a High Performance Field-Oriented Induction Motor Drive,”IEEE Trans.Ind.Electron.,vol.38,No.4,pp.275-282,AUGUST 1991
[9] C.M.liaw,F.J.Lin,Y.S.Kung,“Design and implementation of a high performance induction motor servo drive,”IEE Proceedings-B,V ol.140,No.4,pp.241-248,JULY 1993
[10] F.J.Lin,C.M.liaw,Y.S.Shieh,R.J.Guey,M.S.Hwang,“Robust two-degrees-of-freedom control for induction motor servo drive,”IEE Proc.-Electr.Power Appl.,V ol 142,no.2,pp.79-86,March 1995
[11] C.M.Liaw,Y.K.Chen,K.H.Chao,H.C.chen,“Quantitative design and implementation of PI-D controller with model-following response for motor drive,”IEE Proc.-Electr.Power Appl.V ol 145,no.2.pp.98-104.March 1998
[12] F.J.Lin,C.M.liaw,“Control of Indirect Field- Oriented Induction Motor Drives Considering the Effects of Dead-Time and Parameter Variations,”IEEE Trans.Ind.Electron.,vol.40,No.5,pp.486-495,October 1993
[13]卢子广、王维亚,电子换向电机伺服系统的二自由度H∞优化设计鲁棒控制,电器自动化,No.5,1995
[14]郑载满、刘向东、曲延滨、游标儒,水轮机的鲁棒调速器2自由度控制设计,电器自动化,No.2,1996
[15]曲延滨、郑载满、游标儒,二自由度控制的低敏感度伺服系统,电气传动,No.4,1995
[16]王勋先,韩曾晋,基于反馈线性化的感应电机2-自由度控制系统,清华大学学报(自然科学版),1999年第39卷第9期,29-33
[17]Zhangjing gang,“Robust Two Degree-of-Freedom Control for AC Servo System,”Proc.IPEMC’97
[18]Takaji Umeno,Yoichi Hori,“Robust Speed Control of DC Servomotors Using Modern Two Degrees-of-Freedom Controller Design,”IEEE Trans.Ind.Electron.vol.38,No.5,pp.363-368,October 1991
[19]张井岗,直流调速系统的新型二自由度控制器,基础自动化,No.4,1999
[20] Takaji Umeno,Tomoaki Kaneko,Yoichi Hori,“Robust Servomotors Design with Two Degrees of Freedom and its Application to Novel Motion Control of Robot Manipulators,”IEEE Trans.Ind.Electron.,vol.40,No.5,pp.473-485,October 1993
[21]Zhangjing gang,“Two degree-of-freedom internal model control for induction motor drive system ,”https://www.360docs.net/doc/ae16185104.html,EM’99
[22]张井岗,二自由度PID调节器的内模整定方法,仪器仪表学报,已录用
[23]Tomomochi Hagiwara,Eiko Furutani,Mituhiko Araki,“Two-Degrees-of-Freedom design method of linear-quadratic servo systems with an integral compensator:analysis of the performance deterioration by the introduction of an observer”Int.J.Control,V ol.64,No.5,pp:941-958,1996
[24] Tomomochi Hagiwara,Toshiyuki Yamasaki,Mituhiko Araki,“Two-Degrees-of-Freedom design method of LQI servo systems:disturance rejection by constant state feedback”Int.J.Control,V ol.63,No.4,pp:703-719,1996
[25]D.J.Walker,“On the structure of a two-degree-of –freedom H∞loop shaping control”Int.J.Control,V ol.63,No.6,pp:1105-1127,1996
[26]C.M.liaw,S.Y.Cheng,“Fuzzy Two-Degrees-of-Freedom Speed Controller for Motor Driver”IEEE Trans.Ind.Electron.,vol.42,no.2,pp.209-216,1995
[27]C.M.liaw,F.J.Lin,“Position control with fuzzy adaptation for induction servomotor drive”IEE Proc.-Electr.Power Appl.,V ol 142,no.6.pp.397-404.November 1995
[28]Y.S.Kung,C.M.Liaw,M.S.Ouyang,“Adaptive Speed Control for Induction Motor Drives Using Neural Networks”IEEE Trans.Ind.Electron.vol.42.no.1.pp.25-32,1995
[29]Yasutaka Fujimoto,“Robust Servo-System Based on Two-Degree-of-Freedom Control with Sliding Mode”IEEE Trans.Ind.Electron.,vol.42,No.3,pp.272-280,June 1995
[30]徐洪泽、徐漫涛、张恩福,一种改进的遗传算法用于二自由度PID调节器设计,系统仿真学报,10卷2期,1998
[31]Weidong Zhang,Youxian Sun,Xiaoming Xu,“Two Degree-of-Freedom Smith Predictor for Processes with Time Delay”Automatica,V o.l34,No.10,pp.1279-1282,1998
[32]刘兵、冯纯伯,基于双重准则的二自由度预测控制——连续情况,自动化学报,V o.24,No.6,Nov.,pp.721-725,1998
[33]刘兵、冯纯伯,基于双重准则的二自由度预测控制——离散情况,自动化学报,V o.24,No.6,Nov.,pp.834-836,1998
[34]Eprempain,Bbergeon,“A Multivariable Two Degree-of-Freedom Control Methodology”Automatica,V o.34,No.12,pp.1601-1606,1998
[35]I.Yaesh,U.Shaked,“Two Degree-of-Freedom H∞-Optimization of Multivariable Feedback Systems,”IEEE Transaction on Automatic control .vol.36.no.11.pp.1272-1276,1991
[36]M.J.Grimble,“Two-degrees of Freedom Feedback and Feedforward Optimal Control of Multivariable Stochastic Systems”Automatica,V o.24,No.6,pp.809-817,1988
[37]Namho Hur,Kwanghee Nam,Sangchul Won,“A Tow-Degree-of-Freedom Current Control Scheme for Deadtime Compensation”IEEE Transcation on Industrial Electronics.vol.47,No.3,pp.557-564,june 2000
[38]Rached Dhaouadi,Kenji Kubo,Masahiro Tobise,“Tow-Degree-of-Freedom Robust Speed Controller for High-Performance Rolling Mil l Drives”IEEE Transcation on Industrial Applications.vol.29,No.5,pp.919-925,September/October 1993
[39]R.vilanova,I.serra,“Realisation of two-degrees-of-freedom compensators”IEE Proc.-Control Theory Appl.,V ol.144 ,No.6,November 1997
[40]田玉楚大时滞工业过程的双控制器结构[J]自动化学报,1999, 25(6):824-827
[41]张卫东给定值和干扰响应解藕的新型控制器设计[J]自动化学报,2001, 27(1):103-107
[42] Vandenrsen J M, “Internal model control with improved disturbance rejection” [J], Int. J. control, 1995, 62(4):983-999
[43] Astrom A J, “A new smith predictor f or controlling a process with an integrator and long dead-time” [J]. IEEE Trans. Auto. Control, 1994, 39(3): 343-345
[44]Hiroshi F. “Perfect tracking control based on multirate feedforward control with generalized sampling periods” [J] IEEE Trans.Ind.Electron.,vol.48,No.3,pp.272-280,June 2001.
[45]C. M. Liaw, “Development of a linear brushless DC motor drive with robust position control” IEE Proc.-Electr.Power Appl.,V ol 148,no.2.pp.111-118..March 2001.
[46]K. I. Hwu, “Robust quantitative speed control of a switched reluctance motor drive” IEE Proc.-Electr.Power Appl.,V ol 148,no.4.pp.345-353.July 2001.
[47]王强“基于改进混合遗传算法的二自由度PID控制器设计”控制与决策2001. 16(2):195-198
[48]徐文榜“二自由度PID控制的运动控制器参数自设计”基础自动化2001. 8(2):51-53.
[49]牛瑞燕“智能二自由度内模控制”控制理论与应用2001. 18(4):624-628.
[50]张忠夫“设计二自由度控制器的新方法”华中科技大学学报2001. 29(6):37-39.
[51]孙宜标“交流永磁直线伺服系统的神经网络----滑模双自由度控制”电气传动2002(1):19-23
[52]李升平“基于范数和范数最小化的二自由度最优鲁棒跟踪控制”控制理论与应用2001. 18(4):519-524.
[53]周以琳“2自由度PID锅炉燃烧控制系统的实现”自动化与仪表1997. 12(1):33-35.
[54]林瑞金“增益自调整的神经元二自由度PID控制的SIMULINK仿真模型”计算机仿真2002. 19(1):20-22。
[55]Tian yuchu “Control integrator processes with long delay” 控制理论与应用1999. 16(3):396-400.
[56]郑卫东“二自由度前馈调节器”自动化与仪器仪表,2000(2):43-45.
[57]胡立生“汽车四轮转向的二自由度鲁棒控制器设计”控制理论与应用1999. 16(5):715-717.
[58] 张忠夫“电机调速二自由度控制系统”电气传动自动化1998. 20(1):25-28.
[58]卢子广“电子换向电机伺服系统的二自由度H∞优化鲁棒控制”自动化学报1998. 24(1):37-43.
[59]谢力“伺服问题的二自由度镇定控制器参数化”控制理论与应用2000. 17(1):50-54.
[60]王勋先“感应电机调速系统的鲁棒最优控制”控制理论与应用2000. 17(2):225-230.
[61]C. M. Liaw “Design of a two-degree-of-freedom controller for motor drives” IEEE Transaction on Automatic control .vol.37.no.8.pp.1215-1220,1992
[62]Juli E. Normey-Rico “A unified approach to design dead-time compensators for stable and integrative processes with dead-time”IEEE Transaction on Automatic control .vol.47.no.2.pp.299-305,2002
[63]M.R. Matausek “Modified internal model control approach to the design and tuning of linear digital controllers” Int. J. o f system science, 2002, vol. 33, no.1, pp.67-79
[64]王钊“基于H 控制理论的二自由度内模控制器设计”
作者简介:
张井岗(1965---),男,教授,主要研究领域为鲁棒控制,智能控制及其应用。
社会科学研究方法文献综述
关于商业片植入式广告发展现状及存在问题的研究——受众心理的关注及营销策略、传播方式的使用 文献综述 姓名:王丹 20090257 曾艳 20090261 杨斯琦 20090259 唐梦佳 20090256 余颂庆 20090260 张文 20090262 吴霜 20090258 班级:市场营销03班 指导老师:杨代福 时间:2012-03-10
【引言】 进入21世纪以来,由于行业竞争加剧等原因,商业片植入式广告异军突起,事实上,这种广告模式由来已久,也并非中国特色。植入式广告源于欧美,发展较为成熟,我国的植入式尚处萌芽阶段,负面问题频发,饱受舆论质疑。但不可否认的是,植入式广告不但比传统硬广告更有优势,而且也是快速收回投资成本、降低商业风险急加速媒介产业循环的好方法,作为产业链上重要一环,其存在不仅具有合理性,而且具良好的发展前景。那么,如何使商业片的植入式广告快速的进入其下一个发展阶段成为现阶段的重大问题。因此,对于影响植入式广告效果的重要因素(营销手段、传播方式以及受众心理),值得我们去研究和思考我们。 【正文】 一、植入式广告的文献研究现状 植入式广告于上世纪20年代至20年代末开始萌芽、2000年以后才真正进入蓬勃发展期,虽然相对于传统传播形式的广告,植入式广告的发展历史并不长,但是以商业片植入式广告为代表的植入式广告已经成为广告发展的一股不可抵挡的趋势,而国内外专家、学者对植入式广告发展的方方面面也进行了深入研究和探讨,呈现出一定深度和广度的理论学说及典型案例,对于植入式广告产业发展发挥了作用。从国内外的研究现状看,对于植入式广告的研究成果可归纳为以下四个方面。 1.对于植入式广告的理论体系依据研究 关于植入式广告所依据的理论体系的研究,主要集中在传播学理论的体现与运用;张金海在《20世纪广告传播理论研究》一书中指出,植入式广告在现代广告业的发展中越来越引人注目,体现了现代广告逐渐将目光放在广告传播的社会文化关注,而巧妙地利用传播学中的归因理论和“说服性传播”的效果理论,则可以将这种关注的社会化效果扩大;而吕善锟在其论文《电影中植入式广告的理论依据》中则明确提出,植入式广告之所以比传统的商业广告有更好的说服效果,正在于其运用了传播学中的归因理论、两级传播理论、“说服性传播”的效果研究、经典条件反射理论以及模仿理论等。
微电网并离网控制策略研究及实现
微电网并离网控制策略研究及实现 任洛卿,唐成虹,王劲松,黄琦 南瑞集团公司(国网电力科学研究院), 江苏省南京市211106 The Research and Implementation of Micro-grid's Grid-connected & Off-Grid Control Strategy Ren Luoqing, Tang Chenghong, Wang Jinsong, Huang Qi NARI Group(SGEPRI), Nanjing, Jiangsu 210003 ABSTRACT: This paper analyzes the network structure and operation modes of micro-grid and proposes a method of grid-connected & off-grid control strategy, which is based on fast fault detection and pattern recognition. Improved half-wave Fourier algorithm is used to carry out fast protection computation of the characteristic value so as to implement fast fault detection. The characteristic value is described by logical expressions and its real-time value is used to identify the current running mode and as the criterion to implement smooth switching control between the grid-connected mode and off-grid mode. So far, this method has been successfully applied in Luxi island micro-grid demonstration project. KEY WORD: micro-grid; fast fault detection; pattern recognition; coordinated control strategy 摘要: 本文对微电网组成结构及运行模式进行分析研究,提出了故障快速检测和运行模式识别的微电网并离网控制策略方案。故障快速检测以改进的半波傅里叶计算为基础,通过对微电网特征量的快速保护运算,实现故障的快速检测。微电网并离网平滑切换控制实现方法,将微电网特征量以逻辑表达式的形式进行描述,通过读取微电网特征变量实时值,识别出微电网当前运行模式,实现微电网并离网平滑切换。目前该方法已经成功应用于鹿西岛微电网示范工程。 关键词: 微电网;故障快速检测;模式识别;协调控制策略 1 引言 微电网由分布式发电、负荷、储能等部分组成,一般与中低压配电网相连,是一种可以运行在并网模式或离网模式的小型配电网系统。随着分布式发电技术的发展,分布式电源数量快速增长。智能微源、节能降耗、提高供电质量的目的[1],因此微电网是处理大规模分布式发电接入电网的必然选择,微电网技术的发展对未来坚强电网的发展起着至关重要的作用[2-3]。 微电网有并网和离网两种状态。当电网发生故障时,微电网可离网运行,进入独立的孤岛状态。然而在微电网的发展中,微电网的运行控制尤其是并离网切换控制具有一定的难度。当电网发生故障时,分布式发电和储能设备的电力输出与实际负荷的电力需求很可能不平衡,造成大量电能缺额或电能过剩。此时需要迅速进行判断并进行相应的调节控制,使微电网能够平滑切换至离网状态运行。 现有的微电网并离网切换控制装置一般是针对特定并网方式设计,而离网控制操作过程需要人工参与[4-6],无法自动适应微电网运行方式,很难做到并离网平滑切换控制。因此,研究微电网并离网平滑切换控制策略实现方法[7-12]是保证微电网安全高效运行的迫切需求。 本文对智能微电网的并离网控制策略进行了研究,提出了包括基于快速保护运算的故障检测技术和基于模式自识别的协调控制方法。这些新技术组成的微电网并离网控制策略,使微电网可以在并网和离网模式间实现平滑切换,同时保证重要负荷的持续供电。 2 快速故障检测技术 快速的故障判断是微电网的并离网切换控制的重要基础,而更快速的故障判断需要在更短时间内完成保护量的运算。 传统的全波傅里叶变换是电力系统中经常使用的保护计算方法。 传统计算方法公式如下: N -1 电网作为智能电网的重要部分,能灵活有效地运用分布式发电和储能设备,达到最大化接纳分布式电 2 a n =x n N =0 sin(nπ 2π ) N 4∑ N
自动控制原理实验报告
《自动控制原理》 实验报告 姓名: 学号: 专业: 班级: 时段: 成绩: 工学院自动化系
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、实验原理 1.比例环节的传递函数为 K R K R R R Z Z s G 200,1002)(211 212==-=-=- = 其对应的模拟电路及SIMULINK 图形如图1-3所示。 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G ; ② 惯性环节11)(1+= s s G 和1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节s s G =)(1 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G ⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+= 四、实验结果及分析 图1-3 比例环节的模拟电路及SIMULINK 图形
① 仿真模型及波形图1)(1=s G 和2)(1=s G ② 仿真模型及波形图11)(1+= s s G 和1 5.01)(2+=s s G 11)(1+= s s G 1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节
二自由度简易云台增稳控制系统设计
二自由度简易云台增稳控制系统设计 项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。 项目方案: 本课题分以下步骤展开研究: 2014年4月~ 2014年10月 收集有单片机接口程序设计方面的资料,学习相关理论知识; 2014年11月~2014年12月 学习MWC飞行控制板的程序设计技术; 2015年1月~2015年4月 设计板载姿态传感器数据读取; 2015年5月~ 2015年8月 设计舵机控制程序和平台机械结构,测试平台增稳性能; 2015年9月~2015年10月 撰写研究报告、结题,项目鉴定。 本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制 预期成果: 本项目要求完成如下成果: 设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。完成研究报告一份。 二自由度云台概述: 云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。 根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。 增稳的意义: 比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
文献综述的主要方法
文献综述的主要方法 文献综述抽取某一个学科领域中的现有文献,总结这个领域研究的现状,从现有文献及过去的工作中,发现需要进一步研究的问题和角度。 文献综述是对某一领域某一方面的课题、问题或研究专题搜集大量情报资料,分析综合当前该课题、问题或研究专题的最新进展、学术见解和建议,从而揭示有关问题的新动态、新趋势、新水平、新原理和新技术等等,为后续研究寻找出发点、立足点和突破口。 文献综述看似简单.其实是一项高难度的工作。在国外,宏观的或者是比较系统的文献综述通常都是由一个领域里的顶级“大牛”来做的。在现有研究方法的著作中,都有有关文献综述的指导,然而无论是教授文献综述课的教师还是学习该课程的学生,大多实际上没有对其给予足够的重视。而到了真正自己来做研究,便发现综述实在是困难。 约翰W.克雷斯威尔(John W. Creswell)曾提出过一个文献综述必须具备的因素的模型。他的这个五步文献综述法倒还真的值得学习和借鉴。 克雷斯威尔认为,文献综述应由五部分组成:即序言、主题1(关于自变量的)、主题2(关于因变量的)、主题3(关于自变量和因变量两方面阐述的研究)、总结。 1. 序言告诉读者文献综述所涉及的几个部分,这一段是关于章节构成的陈述。在我看也就相当于文献综述的总述。 2. 综述主题1提出关于“自变量或多个自变量”的学术文献。在几个自变量中,只考虑几个小部分或只关注几个重要的单一变量。记住仅论述关于自变量的文献。这种模式可以使关于自便量的文献和因变量的文献分开分别综述,读者读起来清晰分明。 3. 综述主题2融合了与“因变量或多个因变量”的学术文献,虽然有多种因变量,但是只写每一个变量的小部分或仅关注单一的、重要的因变量。 4. 综述主题3包含了自变量与因变量的关系的学术文献。这是我们研究方案中最棘手的部分。这部分应该相当短小,并且包括了与计划研究的主题最为接近的研究。或许没有关于研究主题的文献,那就要尽可能找到与主题相近的部分,或者综述在更广泛的层面上提及的与主题相关的研究。 5. 在综述的最后提出一个总结,强调最重要的研究,抓住综述中重要的主题,指出为什么我们要对这个主题做更多的研究。其实这里不仅是要对文献综述进行总结,更重要的是找到你要从事的这个研究的基石(前人的肩膀),也就是你的研究的出发点。 在我看来,约翰.W.克雷斯威尔所提的五步文献综述法,第1、2、3步其实在研究实践中都不难,因为这些主题的研究综述毕竟与你的研究的核心问题有距离。难的是第4步,主题3的综述。难在哪里呢?一是阅读量不够,找不到最相
双自由度控制器
第一章绪论 在工程和科学技术发展过程中,自动控制担负着重要的角色。除了在宇宙飞船系统、导弹制导系统和机器人系统等领域中,自动控制具有特别重要的作用之外,它已成为现代机器制造业和工业生产过程中的重要而不可缺少的组成部分。例如,在制造工业的数控机床控制中,在航空和航天工业的自动驾驶仪系统设计中,以及在汽车工业的小汽车和大卡车设计中,自动控制都是必不可少的。此外,在工业中的过程控制,对压力、温度、湿度、黏性和流量的控制等工业操作过程,自动控制也是不可缺少的。 自动控制理论和实践的不断发展,为人们提供了获得动态系统最佳性能的方法,提高了生产率,并且使人们从繁重的体力劳动和大量重复性的手工操作中解放出来。 1.2控制系统的分类 1.2.1 反馈控制系统 能对输出量与参考输入量进行比较,并且将它们的偏差作为控制手段,以 保持两者之间预定关系的系统,称为反馈控制系统。室温控制系统就是反馈系统的例子。通过实际室温,并且将其与参考温度(希望的室温)进行比较,温室调机器就会按照某种方式,加温或冷却设备打开或关闭,从而将室温保持在使人们感到舒适的水平上,且与外界条件无关。反馈系统并不限于工程系统,在各种不同的非工程领域,同样存在着反馈控制系统。 1.2.2 闭环控制系统 反馈控制系统通常属于闭环控制系统。在实践中,反馈控制和闭环控制这两个术语通常交换使用。在闭环控制系统中,作为输入信号与反馈信号(反馈信号可以是输出信号本身,也可以是输出信号的函数及其导数和/或其积分)之差的作用误差信号被传送到控制器,以便减小误差,并且使系统的输出达到希望的值。闭环控制这个术语,总是意味着采用反馈控制作用,以减小系统误差。
二语习得定性研究方法述评[1]
[收稿日期]2000-06-12 [作者简介]庞继贤(1953-)男,浙江宁波市人,浙江大学外国语学院教授,主要从事二语习得、语言学方法论和语言理解的认知理论研究;王敏(1972-)女,陕西安康人,浙江大学外国语学院外国语言学与应用语言学专业硕士研究生。 二语习得定性研究方法述评 庞继贤,王 敏 (浙江大学外国语学院,浙江杭州310027) [摘 要]在国外,应用语言学研究开始越来越注意到定性研究的重要性,改变了定量研究几乎一统天下的局面。 在我国,定性研究也开始逐步得到应用语言学界的重视。本文在定性研究与定量研究方法对比的基础上,从哲学基 础、过程、特点等方面对定性研究进行了深入的探析,指出定性研究方法为二语习得研究提供了非常有价值的手段。 [关键词]定性研究;二语习得;定量研究 [中图分类号] H08 [文献标识码] A [文章编号] 1008-942X (2001)02-0138-06 Q ualitative R esearch Method in Second Language Acquisition Studies :a Critical R evie w PANGJi 2xian ,W ANG Min (School o f Foreign Language Studies ,Zhejiang University ,Hangzhou 310027,China ) Abstract :In the W est ,there is a gradual shift of em phasis from quantitative research method to qualitative research method in ap 2 plied linguistics.The near dominance of quantitative methods has thus begun to change.The field of applied linguistics in China has als o recognized the im portance of this research paradigm.Based on a com parative analysis of these tw o methods ,the present paper ex 2 amines the process and characteristics of this research tradition from a philos ophical basis.It is our contention that qualitative method 2 ology offers an im portant tool in the realm of second language acquisition studies. K ey w ords :qualitative research method ;second language acquisition ;quantitative research method 近十年来,二语习得研究已逐渐由简单粗糙的印象型、感觉型的经验总结或主观的思辨性研究转向有数据、有统计、有分析的以定量为特征的实证研究。但是,在一片定量的欢呼声中,另一种重要的研究方法———定性研究(qualitative research method ),却未能引起人们的足够重视,在我国应用语言学界更是如此。据统计,在1988-1997年国内四种核心外语期刊所发表的学术论文中,属定性研究的仅占2%[1]。许多人对定性研究方法存在种种误解,有人甚至将定性研究方法等同为“非定量研究”,是与定量研究相对立的非科学的方法。事实上,定性研究是指那些以访谈、观察等系统的第一手资料为基础的材料性研究(em pirical studies ),同定量研究一样,是一种具有科学精神和坚实的理论支撑的科学探究方法。本文在定性与定量研究方法对比的基础上,从步骤、研究过程及其在外语或二语习得研究中的应用等几个方面探析定性研究在应用语言学研究中的地位和价值。 一、定性与定量研究方法对比 定性研究与定量研究的哲学基础完全不同。定量研究强调世界万物的因果关系,认为一切事 第31卷第2期 2001年3月浙江大学学报(人文社会科学版)Journal of Zhejiang U niversity(H um anities and Social Sciences)V ol.31,N o.2M ar.2001
可行性研究文献综述
可行性研究文献综述 一、可行性研究简介 可行性研究一词源于英语feasibility study,字义就是行得通,有可能成功的意思。自20世纪30年代作为一种组织管理方法对工程项目进行评价,使美国田纳西河流域开发项目获得成功之后,可行性研究这种仅限于经济评价的报告在工业发达国家成为建设项目开发程序的一个环节。 工业项目可行性研究就是投资工业项目决策前的活动,就是在事件没有发生之前的研究,就是对事务未来发展的情况、可能遇到的问题与结果的估计,具有预测性。因此,必须进行深入的调查研究,充分的占有资料,运用切合实际的预测方法,科学的预测未来前景。 对于投资额较大,建设周期较长,内外协作配套关系较多的建设项目,可行性研究的工作期较长,为了节省投资,减少资源浪费,避免对早期就应淘汰的项目做无效研究,一般将可行性研究分为机会研究、初步可行性研究、可行性研究(有时也叫详细可行性研究)与项目评价决策四个阶段。机会研究证明效果不佳的项目,就不再进行初步可行性研究;同样,如果初步可行性研究结论不可行,则不必再进行可行性研究。 随着科学技术、市场经济与管理科学的高度发展,在不断总结过去经验的基础上,可行性研究理论也得到了不断的完善与发展,至今已成为世界公认的项目评价方法。在项目投资决策之前进行可行性研究,不但有助于减少或避免项目投资失误,而且有助于项目的顺利实施与推进,总的说来,可行性研究对于项目投资决策有着以下非常重要的作用: 作为项目建设立项的依据,作为向银行申请贷款或筹资的依据,作为工程设计与建设的依据,作为向当地政府与环保部门申请建设执照的依据,作为本工程建设补充基础资料的依据,作为项目与各有关部门签订合同或协议的依据,作为核准采用新技术、新设备研制计划的依据,作为企业安排项目计划与实施的依据。 二、国外可行性研究的发展历史 西方最早推行可行性研究方法的就是美国,通过采用这套方法,实现了对河流流域地区良好的开发与综合利用,二战后,随着现代科学技术与管理科学的高度发展,技术经济问题越来越复杂,为了开发新产品,减少投资风险,需要采用科学方法对项目实施进行预测、分析、论证。因此20世纪60年代以来,可行性研究迅速成为投资决策前的一个普遍工作阶段,并且形成了一整套系统理论的科学方法。这种方法在以世界银行为代表的国际经济组织对发展中国家的贷款或援助项目中迅速推广。 在19世纪至20世纪50年代中期,国外主要就是运用简单的财务评价方法通过对项目的收入与支出进行比较来判断项目的优劣。随着社会的发展,简单的财务评价已不能满足社会、政府与企业对项目投资决策的多元化需求。于就是,法国工程师让尔·杜比提出了“消费者剩余”的思想并在1844年发表了“公共工程效用的评价”一文。之后英国经济学家A·马歇尔正式提出了“消费者剩余”的概念,这种思想发展成为现在费用-效益分析的基础,构成了
人工智能研究方法的文献综述
人工智能研究方法的文献综述 1、前言 本文综述了人工智能的主要研究方法,并对各方法进行分析和总结,并阐述了目前人工智能研究方法日趋多样化的研究现状。 2、主题 研究方法,对一个问题的研究方法从根本上说分为两种:其一,对要解决的问题扩展到他所隶属的领域,对该领域做一广泛了解,研究该领域从而实现对该领域的研究,讲究广度,从对该领域的广泛研究收缩到问题本身;其二,把研究的问题特殊化,提炼出要研究问题的典型子问题或实例,从一个更具体的问题出发,做深刻的分析,研究透彻该问题,再一般化扩展到要解决的问题,讲究研究深度,从更具体的问题入手研究扩展到问题本身。 人工智能的研究方法主要可以分为三类:一、结构模拟,神经计算,就是根据人脑的生理结构和工作机理,实现计算机的智能,即人工智能。结构模拟法也就是基于人脑的生理模型,采用数值计算的方法,从微观上来模拟人脑,实现机器智能。采用结构模拟,运用神经网络和神经计算的方法研究人工智能者,被称为生理学派、连接主义。二、功能模拟,符号推演,就是在当前数字计算机上,对人脑从功能上进行模拟,实现人工智能。功能模拟法就是以人脑的心理模型,将问题或知识表示成某种逻辑网络,采用符号推演的方法,实现搜索、推理、学习等功能,从宏观上来模拟人脑的思维,实现机器智能。以功能模拟和符号推演研究人工智能者,被称为心理学派、逻辑学派、符号主义。三、行为模拟,控制进化,就是模拟人在控制过程中的智能活动和行为特性。以行为模拟方法研究人工智能者,被称为行为主义、进化主义、控制论学派。 人工智能的研究方法,已从“一枝独秀”的符号主义发展到多学派的“百花争艳”,除了上面提到的三种方法,又提出了“群体模拟,仿生计算”“博采广鉴,自然计算”“原理分析,数学建模”等方法。人工智能的目标是理解包括人在内的自然智能系统及行为,而这样的系统在实在世界中是以分层进化的方式形成了一个谱系,而智能作为系统的整体属性,其表现形式又具有多样性,人工智能的谱系及其多样性的行为注定了研究的具体目标和对象的多样性。人工智能与前沿技术的结合,使人工智能的研究日趋多样化。 3、总结 人工智能的研究方法会随着技术的进步而不断丰富,很多新名词还会被提出,但研究的目的基本不变,日趋多样化的研究方法追根溯源也就是研究问题的两种方法的演变。对人工智能中尚未解决的众多问题,运用基本的研究问题的方法,结合先进的技术,不断实现智能化。人工智能与前沿技术密切联系,人工智能的研究方法必然日趋多样化。 4、参考文献 (1)人工智能技术导论廉师友西安电子科技大学出版社2007.8 (2)人工智能研究方法及途径熊才权2005年第三期 (3)人工智能学派及其在理论、方法上的观点蔡自兴1995.5 (4)人工智能研究的主要学派及特点黄伟聂东陈英俊2001第三期 (5)人工智能研究对思维学的方法论启示尹鑫苏国辉2002.10第四期
自动控制实验报告1
东南大学自动控制实验室 实验报告 课程名称:自动控制原理 实验名称:闭环电压控制系统研究 院(系):仪器科学与工程专业:测控技术与仪器姓名:学号: 实验室:常州楼五楼实验组别:/ 同组人员:实验时间:2018/10/17 评定成绩:审阅教师: 实验三闭环电压控制系统研究
一、实验目的: (1)通过实例展示,认识自动控制系统的组成、功能。 (2)会正确实现闭环负反馈。 (3)通过开、闭环实验数据说明闭环控制效果。 二、实验原理: (1)利用各种实际物理装置(如电子装置、机械装置、化工装置等)在数学上的“相似性”,将各种实际物理装置从感兴趣的角度经过简化、并抽象成相同的数学形式。我们在设计控制系统时,不必研究每一种实际装置,而用几种“等价”的数学形式来表达、研究和设计。又由于人本身的自然属性,人对数学而言,不能直接感受它的自然物理属性,这给我们分析和设计带来了困难。所以,我们又用替代、模拟、仿真的形式把数学形式再变成“模拟实物”来研究。这样,就可以“秀才不出门,遍知天下事”。实际上,在后面的课程里,不同专业的学生将面对不同的实际物理对象,而“模拟实物”的实验方式可以做到举一反三,我们就是用下列“模拟实物”——电路系统,替代各种实际物理对象。 (2)自动控制的根本是闭环,尽管有的系统不能直接感受到它的闭环形式,如步进电机控制,专家系统等,从大局看,还是闭环。闭环控制可以带来想象不到的好处,本实验就是用开环和闭环在负载扰动下的实验数据,说明闭环控制效果。自动控制系统性能的优劣,其原因之一就是取决调节器的结构和算法的设计(本课程主要用串联调节、状态反馈),本实验为了简洁,采用单闭环、比例调节器K。通过实验证明:不同的K,对系性能产生不同的影响,以说明正确设计调节器算法的重要性。 (3)为了使实验有代表性,本实验采用三阶(高阶)系统。这样,当调节器K值过大时,控制系统会产生典型的现象——振荡。本实验也可以认为是一个真实的电压控制系统。 三、实验设备: THBDC-1实验平台 四、实验线路图: 五、实验步骤:
二语习得文献综述
二语习得的母语迁移研究 引言: 二语习得的母语迁移现象既属于语言学范畴,亦属于心理学范畴。第二语言习得,简称为二语习得,通常指母语习得之后的任何其他语言学习。“母语迁移”指的是,在第二语言的习得过程中,学习者的第一语言即母语的使用习惯会直接影响第二语言的习得,并对其起到积极促进或消极干扰的作用。随着经济的全球化,学习第二语言,这里主要指的是英语,已经是一股不可阻挡的潮流。然而,在学习第二语言中,人们或多或少的受到母语的影响,导致不理想的结果。“中式英语”现象的出现正是由于母语迁移的负效应的影响,英语学习者由于受到本身母语知识体系的影响,在潜意识中把母语的知识体系移植到英语应用上。对于二语习得中母语迁移的研究,为第二语言学习者提供了新思路;有利于国内英语教学的发展,启发教师帮助学生克服母语迁移的干扰,促进迁移,从而提高外语教学的成效。 1.二语习得母语迁移研究的方面 在相关文献中,大部分专家学者都是从语言迁移的理论,母语迁移的表现形式,母语迁移对二语习得的影响表现以及二语习得母语迁移现象对教与学的启示这四个方面展开论述二语习得的母语迁移,下面就从这几个方面展开论述 1.1母语迁移的研究历理论 二十世纪五、六十年代,行为主义控制语言学习以及语言教学;二十世纪六十年代Lado在行为主义理论基础上提出了对比分析假说。20 世纪 60 年末到70 年代初,乔姆斯基普遍语法观点,过渡语( inter—language,也称中介语) 理论、错误分析( error analysis,也称偏误分析) 兴起。在对比分析研究中展开了大量实证研究,其中相当一部分研究结果确实证实了 Lado 等人的理论但是,也有一些实证研究指出了“距离 = 难度”理论所不能解释的现象,发现学习者往往是在母语与目的语表面上相似的地方更容易犯错误等,同时对比分析对于学习者错误的预测能力也受到了质疑。1970 年代末、1980 年代初,标记理论被引入母语迁移现象研究领域。1990 年代以来,基于语言共性,一系列新的母语迁移理论涌现出来,如最小树假说,弱迁移假说,全迁移假说,整体损伤说等,但
微网监控系统及其控制策略探究
微网监控系统及其控制策略探究 摘要:在当今世界范围内第三代电网发展和建设拉开序幕时,节能环保,可再 生能源利用和智能化为特征的微电网逐渐成为趋势,随着技术的发展,绿色环保 政策和电力市场机制改革等因素的共同作用使得分布式发电成为未来发展重要的 能源选择。现阶段我国的 能源方式仍以集中供电系统为主,分布式能源的发展并不能取代传统的能源供电方式, 将是集中供能系统的有益补充。 关键词:微网;监控系统;策略研究 引言 随着我国经济社会的不断发展,对于能源的需求也是越来越高,人们逐渐对环境的要求 也在不断变化,现代的一些清洁能源逐渐代替传统能源。在该大环境之下,微型电力系统逐 渐被大众所接受,它主要由微源、负荷和各个系统链接所构成,这样能够达到运行极为灵活 轻巧,并且可以独立并网地运行的微型电力系统。在我国逐渐提出了“互联网+”之后,新能源 微网代表了未来的发展趋势,能够推进新时代的节能减排和促进环保。 1微网具备的特点 第一是分布式能源的集成和运用,第二运行方式极为方便,第三电网可以自我调节,电 能的质量好,第四高可靠性,可以脱离大电网独立运行。根据上面的特点,我们不难看出在 微网的建设过程之中,是基于了电子技术的发展,静态开关和电能的质量控制。在运行的过 程中包括了微电网故障检测和保护技术、运行控制技术、通信技术和能量管理技术等。 2监控系统设计 监控系统是整个微网系统当中的核心部分,起着协调作用,有利于实现微网协调、稳定 控制、高效科学、能源最大化,是充分完备的设备。在微网运行过程当中,监控系统通过数 据的监测,事实掌握微网的运行现状,通过数据的分析,实现微网的控制目标和协调机制, 总的来说监控系统是微网运行不可缺少的一部分。 2.1监控系统的特点 不同于电站和水站,微网系统有着自身的特点和优势:第一,能够控制对象的分布位置,能源的负荷主要是以区域为单位,可以分布在各个区域;第二,运行模式多样化,它们的并 网运行模式根据不同的控制目标和主体有着不同的运行方式;第三,不同控制策略对系统响 应速度存在不一样的差异,比如电能质量调节、无缝对接等,都要求在发电时,必须使得监 控系统达到分钟级别或者小时级别。第四,个性化的设计需求是特别高的,要根据不同微网 的特点和分布的情况,来定制化设计系统,使得微网的运行方式更加的完备和可靠。 2.2监控系统功能架构 根据以往的微网的特点,在设计微网监控系统时,要采用模块化的设计方式,以此来适 用微网的各个功能系统。首先从纵向来看,系统功能主要分为了三个层面,主要有平台基础 功能、业务应用功能和综合功能体系。其中平台应用功能主要指的是为微网系统提供基础性 的服务支撑,主要包括了报表、数据、模型等方面的内容,业务应用主要涉及了微网内部的 各个元素的基本配置情况设置,有微网的综合监控、综合管理监控信息等。综合功能指的是 微网的效能分析、发电预测、负荷预测和协调控制。
自动控制原理实验报告2
自动控制原理课程实验 2010-2011学年第一学期 02020801班 张驰2008300566
? 课本实验内容 6-26 热轧厂的主要工序是将炽热的钢坯轧成具有预定厚度和尺度的钢板,所得到的最终产品之一是宽为3300mm 、厚为180mm 的标准板材。他有两台主要的辊轧台:1号台与2号台。辊轧台上装有直径为508mm 的大型辊轧台,由4470km 大功率电机驱动,并通过大型液压缸来调节轧制宽度和力度。 热轧机的典型工作流程是:钢坯首先在熔炉中加热,加热后的钢坯通过1号台,被辊轧机轧制成具有预期宽度的钢坯,然后通过2号台,由辊轧机轧制成具有与其厚度的钢板,最后再由热整平设备加以整平成型。 热轧机系统控制的关键技术是通过调整热轧机的间隙来控制钢板的厚度。热轧机控制系统框图如下: 扰动)(s N )(s R (1)已知)54(/)(20++=s s s s s G ,而)(s G c 为具有两个相同实零点的PID 控制器。要求:选择PID 控制器的零点和增益,使闭环系统有两对对等的特征根; (2)考察(1)中得到的闭环系统,给出不考虑前置滤波器)(s G P 与配置适当)(s G P 时,系统的单位阶跃响应; (3)当)(s R =0,)(s N =1/s 时,计算系统对单位阶跃扰动的响应。 ? 求解过程 解:(1)已知 )54(/)(20++=s s s s s G )(s G P )(s G C )(0s G
选择 s z s K s G c /)()(2+= 当取K=4,Z=1.25时,有 s s s s s G c 4/25.610/)25.1(4)(2++=+= 系统开环传递函数 )54(/)25.1(4)()(2220+++=s s s s s G s G c 闭环传递函数:)25.61094/()5625.15.2(4))()(1/()()()(2 34200++++++=+=s s s s s s s G s G s G s G s c c φ (2) 当不考虑前置滤波器时,单位阶跃输入作用下的系统输出 )25.61094(/)5625.15.2(4)()()(2342++++++==s s s s s s s s R s s C φ 系统单位阶跃响应如图1中(1)中实线所示。 当考虑前置滤波器时,选 2)25.1/(5625.1)(+=s s G p 则系统在单位阶跃输入作用下的系统输出 )25.61094(/25.6)()()()(234++++==s s s s s s R s s G s C p φ 系统单位阶跃曲线如图1中(1)虚线所示。 (3)当)(s R =0,)(s N =1/s 时,扰动作用下的闭环传递函数 )25.61094/())()(1/()()(23400++++-=+-=s s s s s s G s G s G s c n φ 系统输出 )25.61094/(1)()()(2 34++++-==s s s s s N s s C n n φ 单位阶跃响应曲线如图1中(2)所示。 MATLAB 程序代码: MA TLAB 程序:exe626.m K=4;z=1.25; G0=tf(1,conv([1,0],[1,4,5])); Gc=tf(K*conv([1,z],[1,z]),[1,0]); Gp=tf(1.5625,conv([1,z],[1,z])); G1=feedback(Gc*G0,1); G2=series(Gp,G1); G3=-feedback(G0,Gc); t=0:0.01:10; [x,y]=step(G1,t);[x1,y1]=step(G2,t); figure(1);plot(t,x,'-',t,x1,':');grid
二语习得 文献综述 作业样本
英师11101班 201100495 姓名: 关于年龄因素与二语习得研究的文献综述 姓名: 摘要:年龄问题是二语习得研究领域一个热点话题,其研究主要集中在探讨语言学习有无一个敏感期(sensitive period)或临界期(critical period,有人译做关键期)的问题上。通过对近20年来一些具有代表性的论文的分析,大概可将这些研究分为两类,一是翻译和评介外国理论,二是探讨年龄差异与外语教学。 关键词:年龄因素,二语习得,文献,综述。 第二语言习得(Second Language Acquisition)是一个相对比较年轻的一个领域。但是,在过去的四、五十年间该领域的各项研究已有了一个长足的发展与进步。年龄问题是二语习得研究领域一个热点话题,其研究主要集中在探讨语言学习有无一个敏感期(sensitive period)或临界期(critical period,有人译做关键期)的问题上。(王初明,2001)我国学者除了翻译介绍国外理论以外,还主要探讨了所谓临界期或关键期对于外语教学的启示等问题,这方面已有大量文章问世。下面,笔者将对近20年来关于二语习得年龄问题的论文作一综述,疏漏不当之处,敬请指教。 一、翻译、评介国外理论的论著 国外有关二语习得年龄研究的理论成果大多围绕着所谓的关键假说(Critical Period Hypothesis,或译临界期假说)展开的。这一理论最初的构想来自Lennenberg(1967),后来围绕此理论形成支持派和反对派。我国学者对国外理论的引进主要集中在对支持派和反对派观点的介绍和评述上。戴曼纯介绍了 C .Snow和M. Hoefnagel-hohle(1978)有关关键期假说的相关试验及研究,以及一些学者有关“敏感期”假设的实验研究(戴曼纯,1994)。王初明就国外语言习得临界期的研究所取得的成果进行了大致介绍(王初明,2001)。王立非和李瑛就美国二语习得专家David Birdsong在1999年出版的《第二语言习得与关键
教育研究方法文献综述_0
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 教育研究方法文献综述 文献综述报告结构 1、引言: 简要描述研究问题的性质,并进一步陈述研究问题(为什么研究) 2、综述的主体: 简要报告其他人的发现与观点。 通常将相关的研究放在一起讨论,并用小标题进行分类;详细介绍主要的研究工作,略提相对次要的研究策略: 时间、流派、代表人物 3、总结: 给出已有知识与观点的全貌 4、结论: 5、参考文献: 引用过的文献、其他索引(格式引言家庭是知识、价值观、态度、角色和习惯代代相传主要的传播体。 通过与家庭系统的互动, 子女形成自己的人格、思维模型和行为方即、家庭是人生最初始和最荃础的教育环境。 有研究表明, 家庭环境对青少年的健康发展、学业成绩有着重要影响。 那么到底家庭中的哪些因素对子女的学业成绩产生影响,家庭因素又是如何影响子女的学业成就的呢?一系列的研究表明:家庭因素中对子女学业成就产生影响的因素有很多,如家庭环境、父母文化教育程度、父母教养方式、家庭结构、家庭社会经济地位等等。 1,与家庭的社会经济地位相联系的各种客观因素,如家 1 / 17
庭的社会经济地位、家庭的破裂、家长的文化程度及职业类别等;(柳敏峰,徐长江,王黎华. 家庭因素对中学生学业成绩影响的调查研究,[J]. 教育测量与评价, 1674- 1536( 2010) 03- 0043- 04.)1) 家长的文化程度、文化程度越高,采用情感温暖、理解的教养方式越多,采用拒绝、否认的教养方式则相对较少。 从而使孩子增强了信心,培养了学习的兴趣,从而促进了学业成绩的提高。 采用《父母教养方式评价量表》以及《家庭教育状况调查表》对德州三中学生进行了关于家长教养方式的调查和统计显示家长的文化程度差别较大且对学生的学业成绩有显著的影响。 (【2】刘新宇德州三中学生学业成绩与家庭教育状况的相关性研究【J】山东师范大学教育硕士学位论文 2009)家长的职业 2) 职业为专业技术人员和企事业干部的家长,其子女学业成绩优秀的较多,而工人和个体劳动者的子女相对学业成绩优秀的较少。 经分析,专业技术人员和企事业干部一般都具有良好的文化素养,有属于自己的比较理想的事业和职业,对个人的发展也看得很重,他们会通过自己的努力来实现个人的价值,他们有自己的生活目标、兴趣爱好,关注自身的情绪体验。 他们多采取民主的教养方式,在精神层面会把自己和孩子视为相互独立的两个主体,尊重孩子的感受和发展。 身为工人和个体劳动者的学生父母一般从事体力甚至重体力劳动,还有的为了生计外出打工,一般无自己满意的事业,很难实
微网控制策略研究综述
微网控制策略研究综述 江苏科技大学 李雅倩 【摘要】由于分布式电源各具特色,储能、负荷装置也不尽相同,为使分布式电源在并网以及脱离主网时实现无缝切换,通常需要采用不同的控制策略。本文主要阐述了国内外微网控制策略的研究现状,分析了各种微网控制方法的优点及局限性,探讨了微网控制的研究方向,给出了微网控制策略的一些建议。 【关键词】微网;分布式电源;控制 1.引言 传统的庞大电力系统在适应负荷变化的灵活性与供电安全性方面存在很多弊端,加之常规能源的逐渐衰竭以及环境污染的日益加重等因素使得全球的目光转向以新能源为主能源的分布式发电(Distributed Generation,简称DG)技术。 2.微网的概念 微网是指由多个分布式电源(Distributed Resource,简称DR)、储能系统、重要负荷和保护装置汇集而成的配电系统[1]。分布式电源包括光伏电池、风力发电机、燃料电池、燃气轮机、生物质能发电机等。储能系统分为机械储能、电磁储能和电化学储能。各种储能技术因不同的电能转换方式和存储形态,在储能容量、功率规模、功率和能量密度、循环寿命、单位容量和单位功率造价、响应时间以及综合效率等方面有着明显区别。 微网是一个能够实现自我控制、保护和管理的自治系统,既可以与大电网并网运行,也可以孤立运行。在联网模式下,负荷既可以从电网或微网获得或输送电能(根据接入电网的准则)。当电网的电能质量不满足用户要求或电网发生故障时,微网与主电网断开,运行于孤岛模式。在孤岛模式,微网必须满足自身供需能量平衡。微网技术克服了DR单独接入主网时对配电网造成的不利影响,其在可靠性、经济性和灵活性方面具有显著优势。 3.微网控制 3.1 单个分布式电源控制方法 常见的分布式电源接口逆变器控制方法分为恒功率(PQ)控制、下垂控制和恒压恒频(V/f)控制[14-16]。 (1)恒功率控制 如图1.1所示,分布式电源接口逆变器采用PQ控制,其控制目的是使分布式电源输出的有功和无功功率等于其参考功率。该控制方法需要系统中有维持电压和频率的分布式 图1.2?Droop控制的原理 (2)下垂控制 下垂控制原理如图1.2所示,它利用分布式电源输出有功功率和频率,无功功率和电压幅值均成线性关系而进行控制。对等控制 策略中的分布式电源接口逆变器的控制。 (3)恒压恒频控制 原理如图1.3所示,不管分布式电源输出 功率如何变化,其输出电压的幅值和频率一 直维持不变。此方法一般用在主从控制策略 3.2 多个分布式电源控制方法 (1)主从控制策略 主从控制模式是指在微网处于孤岛运行 模式时,其中一个DG或储能装置采取V/f控 制,用于向微网中的其它DG提供电压和频率 参考,而其它DG则可采用PQ控制。 当微网在联网模式运行时,电网可以稳 定系统的频率,微网不需要进行频率调节; 而孤岛模式运行时,主从控制系统中的主控 制单元需要维持系统的频率和电压。在联网 运行时微网中所有分布式电源采用PQ控制, 即微网不参与系统频率调节,只输出指定的 有功和无功功率;在孤岛运行时主单元采用 V/f控制维持系统的电压和频率恒定[13-14]。 常见的主控制单元选择包括下述几种: 1)储能装置作为主控制单元。这类典 型示范工程包括荷兰Continuon微网[3],希腊 NTUA微网[4]等。 2)分布式电源为主控制单元。这类典型 示范工程包括葡萄牙EDP微网[5]等。 3)分布式电源加储能装置为主控制单元。 这类典型示范工程包括德国MVV微网[6]等。 (2)对等控制模式 对等控制模式中的微网中所有的DG在控 制上都具有同等的地位,每个DG都根据接入 系统点电压和频率的就地信息进行控制。同 时这种控制方法能让微网具有“即插即用” 的功能。采用对等控制策略,要求分布式电 源采用本地变量进行控制,不同分布式电源 [7-9] 图1.5?P-f和Q-V下垂控制 两种基于下垂特性的典型控制方法在对 等控制策略的分布式电源控制中被广泛应 用[10-12]。采用Droop控制可以实现负载功率变 化在DG间的自动分配,但负载变化前后系统 的稳态电压和频率也会有所变化。一种是f-P 和V-Q下垂控制方法,它利用测量系统的频率 和分布式电源输出电压幅值产生有功和无功 功率。另一种方法是利用测量分布式电源输 出的有功和无功功率产生电压频率和幅值, 称作P-f和Q-V下垂控制法,如图1.4和1.5所 示。 TimGreen在他的微网控制系统中提出了 一种分布式电源接口逆变器的三环反馈控制 方法[17],内环控制器提高了电能质量、增 加滤波器谐振阻尼的同时限制故障电流。尤 其指出了采用滤波电感电流作为控制变量能 限制逆变器输出的最大电流,为保护逆变器 提供了依据。但是采用这种控制方法,分布 式电源接入主网时电流变化会影响其端口输 出电压的变化,因此电压受负荷扰动影响较 大。 (3)分层控制模式 文献[2]就提出配网调度中心、微网、 分布式电源三者的分层协调控制策略的基础 上,应用多代理理论,建立了一个由全系统 控制协调代理(CAG)、微网控制代理(MGAG)、 分布式电源代理(DRAG)以及母线代理(BAG) 组成的多代理系统,在保证配电网辐射状运 行、满足配电网电压与电流及馈线容量等约 束条件的情况下进行供电恢复。 3.3 其他控制方法 文献[18]用粒子群优化(PSO)方法解决继 电器协调的问题,制定一个混合整数非线性 规划(MINLP)方法。并提出了利用方向性过流 继电器保护分散型分布式电源组成的微网。 文献[19]提出了一种阻抗为电阻线的低 电压分布式电源控制策略。在电压骤降情况 下提出了逆变器接口的虚拟电感器输出控制 方法,以及当地负载效应功率控制算法。 文献[20]分析采用闭环控制的逆变器输 出阻抗受线路参数和控制器参数影响的基础 上,进行内环电压电流控制器的设计,电压 控制器采用PI控制器稳定负荷电压,采用比 例环节的电流控制器提高系统响应速度,并 且设计控制器参数使输出阻抗为感性阻抗。 在此基础上利用下垂特性设计外环功率控制 器,实现微网内多逆变单元间的无线通信控 制。 文献[21]分析了微网中:(1)可能发生的 开关事件;(2)导致分布式电源形成孤岛模式 的故障事件。DR包括一个传统的旋转同步机 和电力电子转换器接口。后者的单元接口转 换器配有独立有功和无功功率控制,以减少 孤岛瞬变,保持微网相角稳定和电压质量。 文献[22]提出了分布式电源的主动式孤 岛检测方法。该方法是基于横轴(d轴)或纵轴 (q轴)电压、电流转换器注入干扰信号然后进 行检索。 文献[23]提出了采用根轨迹和频域法分 析传统控制技术来设计控制器的方法。 4.微网控制策略的研究方向 微网技术作为电力系统的的前沿领域, 必将发挥其更大的作用。微网控制是其中最 关键的技术,它必将融合传统控制理论、智 能控制(包括模糊控制、神经网络、小波分 析、专家系统等)技术,建立微网系统最优控 制的模型。 微网系统具有单个DR的(下转第191页)