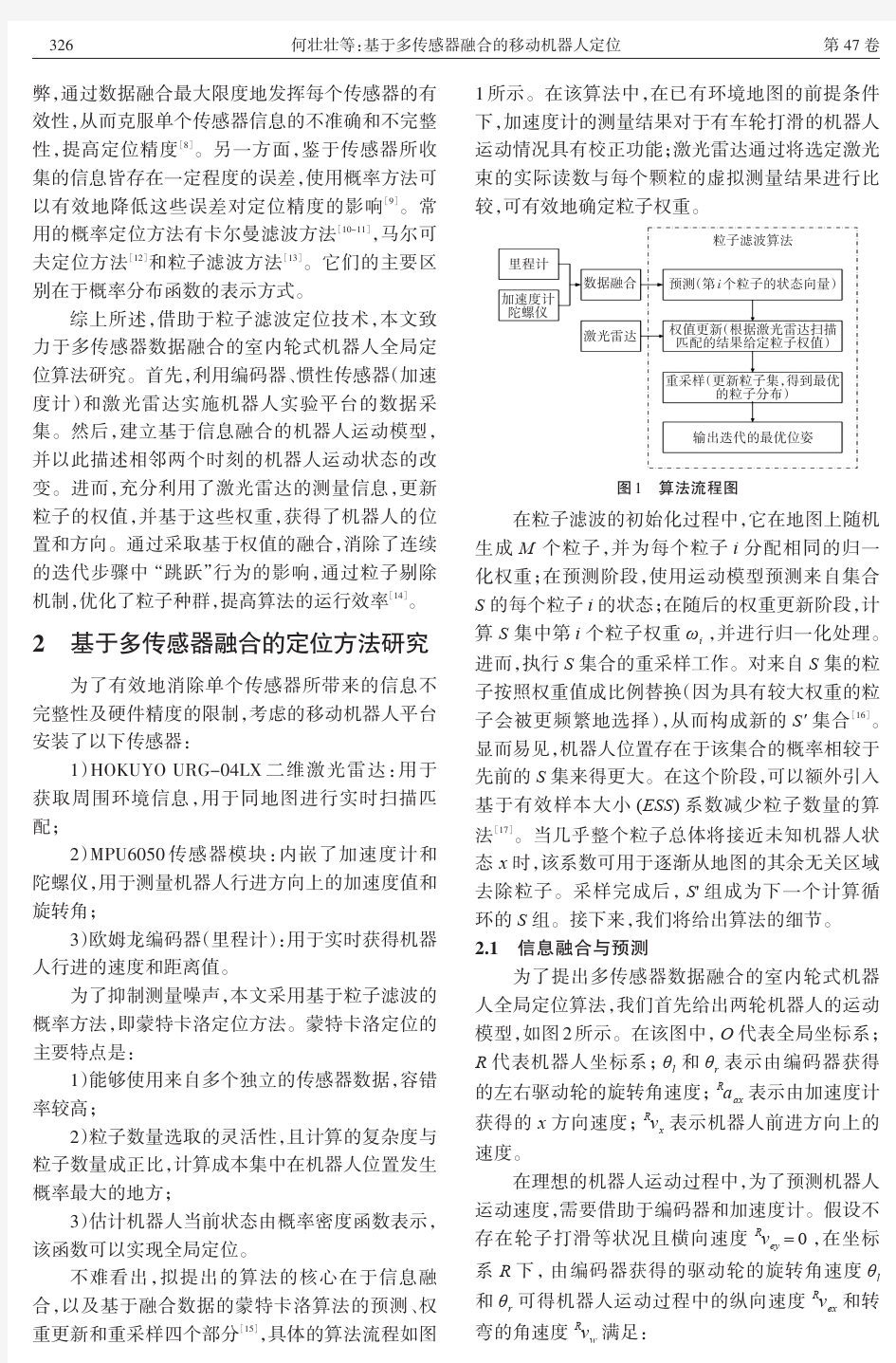
基于多传感器融合的移动机器人定位

移动机器人导航技术总结
移动机器人的关键技术分为以下三种: (1)导航技术 导航技术是移动机器人的一项核心技术之一[3,4]"它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动"目前,移动机器人主要的导航方式包括:磁导航,惯性导航,视觉导航等"其中,视觉导航15一7]通过摄像头对障碍物和路标信息拍摄,获取图像信息,然后对图像信息进行探测和识别实现导航"它具有信号探测范围广,获取信息完整等优点,是移动机器人导航的一个主要发展方向,而基于非结构化环境视觉导航是移动机器人导航的研究重点。 (2)多传感器信息融合技术多传感器信息融合技术是移动机器人的关键技术之一,其研究始于20世纪80年代18,9]"信息融合是指将多个传感器所提供的环境信息进行集成处理,形成对外部环境的统一表示"它融合了信息的互补性,信息的冗余性,信息的实时性和信息的低成本性"因而能比较完整地,精确地反映环境特征,从而做出正确的判断和决策,保证了机器人系统快速性,准确性和稳定性"目前移动机器人的多传感器融合技术的研究方法主要有:加权平均法,卡尔曼滤波,贝叶斯估计,D-S证据理论推理,产生规则,模糊逻辑,人工神经网络等"例如文献[10]介绍了名为Xavier的机器人,在机器人上装有多种传感器,如激光探测器!声纳、车轮编码器和彩色摄像机等,该机器人具有很高的自主导航能力。 (3)机器人控制器作为机器人的核心部分,机器人控制器是影响机器人性能的关键部分之一"目前,国内外机器人小车的控制系统的核心处理器,己经由MCS-51、80C196等8位、16位微控制器为主,逐渐演变为DSP、高性能32位微控制器为核心构成"由于模块化系统具有良好的前景,开发具有开放式结构的模块化、标准化机器人控制器也成为当前机器人控制器的一个研究热点"近几年,日本!美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构!网络功能的机器人控制器"我国863计划智能机器人主题也已对这方面的研究立项 视觉导航技术分类 机器人视觉被认为是机器人重要的感觉能力,机器人视觉系统正如人的眼睛一样,是机器人感知局部环境的重要“器官”,同时依此感知的环境信息实现对机器人的导航。机器人视觉信息主要指二维彩色CCD摄像机信息,在有些系统中还包括三维激光雷达采集的信息。视觉信息能否正确、实时地处理直接关系到机器人行驶速度、路径跟踪以及对障碍物的避碰,对系统的实时性和鲁棒性具有决定性的作用。视觉信息处理技术是移动机器人研究中最为关键的技术之一。
扫地机器人原理及实现
扫地机器人结构及控制系统设计 自动清扫机器人是当今服务机器人领域一个热门的研究方向。从理论和技术上讲,自动清扫机器人比较具体地体现了移动机器人的多项关键技术,具有较强的代表性,从市场前景角度讲,自动清扫机器人将大大降低劳动强度、提高劳动效率,适用于宾馆、酒店、图书馆、办公场所和大众家庭。因此开发自动清扫机器人既具有科研上的挑战性又具有广阔的市场前景。 家用智能清扫机,包括计算机、传感器、电机与动力传动机构、电源、吸尘器、电源开关、操作电位计等,在清扫机的顶部共设有三个超声波距离传感器;清扫机底部前方边沿安装有5个接近开关,接近开关与超声波距离传感器一起,构成清扫机测距系统;清扫机装有两台直流电机;在清扫机的底部安装有吸尘器机构。自动清扫机器人的功能是自动完成房间空旷地面尤其是家居空旷地面的清扫除尘任务,打扫前,要把房间里的物体紧靠四周墙壁,腾出空旷地面。清扫机完成的主要功能:能自动走遍所以可进入的房间,可以自动清扫吸尘,可在遥控和手控状态下清扫吸尘。 本文所介绍的自动清扫机器人的总体布局方案如图1所示,前后两轮为万向轮,左右两轮为驱动轮。驱动轮设计采用两轮独立且各由两台步进电动机驱动的转向方式,通过控制左右两轮的速度差来实现转向。考虑到机器人实际应用的实用性,本驱动系统设计成一个独立的可方便替换的模块,当机器人驱动系统发生故障时,只需简单步骤就可以对驱动部分进行替换。同时为了机器人能够灵活的运动,从动轮选用万向轮。 下图为自动清扫机的三维立体图:
自动清扫机器人车箱体采用框架式结构。从下至上分隔成三个空间:第一层装配各运动部件的驱动电机、传动机构;第二层为垃圾存储空间;第三层装配机器人控制系统、接线板、
机器人上用的传感器的介绍
机器人上用的传感器的介绍 作者:Ricky 文章来源:https://www.360docs.net/doc/ae18135992.html,更新时间:2006年05月20日打印此文浏览数:18549 感知系统是机器人能够实现自主化的必须部分。这一章,将介绍一下移动机器人中所采用的传感器以及如何从传感器系统中采集所需要的信号。 根据传感器的作用分,一般传感器分为: 内部传感器(体内传感器):主要测量机器人内部系统,比如温度,电机速度,电机载荷,电池电压等。 外部传感器(外界传感器):主要测量外界环境,比如距离测量,声音,光线。 根据传感器的运行方式,可以分为: 被动式传感器:传感器本身不发出能量,比如CCD,CMOS摄像头传感器,靠捕获外界光线来获得信息。 主动式传感器:传感器会发出探测信号。比如超声波,红外,激光。但是此类传感器的反射信号会受到很多物质的影响,从而影响准确的信号获得。同时,信号还狠容易受到干扰,比如相邻两个机器人都发出超声波,这些信号就会产生干扰。 传感器一般有以下几个指标: 动态范围:是指传感器能检测的范围。比如电流传感器能够测量1mA-20A的电流,那么这个传感器的测量范围就是10log(20/0.001)=43dB. 如果传感器的输入超出了传感器的测量范围,那么传感器就不会显示正确的测量值了。比如超声波传感器对近距离的物体无法测量。 分辨率:分辨率是指传感器能测量的最小差异。比如电流传感器,它的分辨率可能是5mA,也就是说小于5mA的电流差异,它没法检测出。当然越高分辨率的传感器价格就越贵。 线性度:这是一个非常重要的指标来衡量传感器输入和输出的关系。 频率:是指传感器的采样速度。比如一个超声波传感器的采样速度为20HZ,也就是说每秒钟能扫描20次。 下面介绍一下常用的传感器: 编码器:主要用于测量电机的旋转角度和速度。任何用电机的地方,都可以用编码器来作为传感器来获得电机的输出。
移动机器人定位系统设计方案
移动机器人定位--传感器和技术 摘要 确切的了解车辆的位置是移动机器人应用的一个基本问题。在寻找解决方案时,研究人员和工程师们已经开发出不同的移动机器人定位系统、传感器以及技术。本文综述了移动机器人定位相关技术,总结了七种定位系统:1.里程法;2.惯性导航;3.磁罗盘;4.主动引导; 5.全球定位系统; 6.地标式导航和 7.模型匹配。讨论了各自的特点,并给出了现有技术的例子。 移动机器人导航技术正在蓬勃发展,正在开发更多的系统和概念。因为这个原因,本文给出的各种例子只代表各自的种类,不表示作者的倾向。在文献上可以发现许多巧妙的方法,只是限于篇幅,本文不能引用。 1。介绍 摘要概述了该技术在传感器、系统、方法和技术的目标,就是在一个移动机器人的工作环境中被找到。在测量文献中讨论这个问题,很明显,不同方法的基准比较是困难的,因为缺乏公认的测试标准和规的比较。使用的研究平台大不相同,用于不同的方法的关键假设也大不相同。再进一步,困难源自事实上不同的系统是处在其发展的不同阶段。例如,一个系统已经可以商业化;而另一个系统,也许有更好的性能,却只能实验室条件下作有限的测试。正是由于这些原因,我们一般避免比较甚至判断不同系统或技术的表现。在这篇文章里,我们也不考虑自动引导车(AGV)。AGV使用磁带、地下的引导线、或地面上的彩色条纹在作引导。这些小车不能自由设计路径,不能改变自己的道路,那样它们无法响应外部传感器输入(如避障)。然而,感兴趣的读者可能会在[Everett, 1995]找到AGV引导技术调查。 也许最重要的移动机器人定位文献的阅读结果,正是到目前为止,并没有真正完美的解决问题的方案。许多局部的解决办法大致分为两组:绝对的和相对的位置测量。因为缺乏一种完善的方法,开发移动机器人通常结合两种方法,从每个小组选一个方法。这些方法可以进一步分为以下七类: I:相对位置的测量(也称为Dead-reckoning) 1。里程法 2。惯性导航 II:绝对位置测量(基于参考的系统) 3。磁罗盘 4。主动发射引导 5。全球定位系统 6。地标式导航 7。模型匹配
多传感器融合的室内机器人惯性导航定位研究
多传感器融合的室内机器人惯性导航定位研究随着社会的发展科学技术水平的进步,室内移动机器人得到了大量应用。但是在室内移动机器人导航定位上存在几个矛盾的问题,定位精度、制造成本、实现复杂程度。 室内移动机器人不同于室外机器人,室内是一个封闭狭小的空间,无法利用 如GPS,北斗一类的卫星导航和定位。目前室内移动机器人应用较多的是家庭服 务机器人和仓储机器人,应用最多的驱动方式是轮式移动方式,主要的导航方式 是陀螺仪,里程计,加速度传感器组合的惯性导航,以及磁导航,轮式移动机器人 轮子的配置有两轮,三轮,四轮之分。 不同的配置有着不同的优缺点,根据不同的应用条件可以选择不同的配置。本文根据研究目标,选择了三轮配置的室内移动机器人作为载体,其驱动方式选 择了两轮差速移动驱动方式。 本文在所选的机器人平台上根据平台特性利用全新的导航方式,提高了室内机器人的导航定位精度。本文主要的研究内容有以下几点:1.研究了机器人平台及其运动模型:本文选择的机器人平台是两轮差速移动机器人,其特点是结构简单,驱动控制简单,应用广泛。 其运动学模型只需要分析两驱动轮的速度,适合本文所需要构建的导航系统。 2.提出了融合激光图像位移传感器和地磁传感器的导航定位系统:本文的导航系统是激光图像位移传感器,姿态模块和里程计,其中激光图像位移传感器用于检 测机器人移动位移,姿态模块包括地磁传感器,陀螺仪,加速度计,用于检测机器 人姿态角,里程计检测机器人移动速度。 利用卡尔曼滤波将上述传感器信息融合实现导航定位。3.根据设计的导航定
位系统实现导航定位:根据构建的系统需要将所有传感器的信息进行采集分析处理,本文利用微软的VC++开发环境采集传感器数据,利用MATLAB实现数据的融合,实现导航定位。
一种全向移动机器人的实现
一种全向移动机器人 的实现 --------------------------------------------------------------------------作者: _____________ --------------------------------------------------------------------------日期: _____________
机械电子学 学院:机电工程学院 专业:机械设计及理论 班级:研1501 学号: 姓名:鹿昆磊 指导教师:李启光 日期: 2016年5月13日 一种全向移动机器人的设计
摘要:轮式机器人作为移动机器人中的重要分支之一,由于其承载能力强、定位精度高、能源利用率高、控制简单等优点,长久以来一直受到国内外研究人员的关注。移动机器人的研宄涉及到控制理论、计算机技术和传感器技术等多门学科。因此,对轮式移动机器人进行研宄具有一定的意义。本文对四轮独立驱动和转向移动机器人的机械结构设计、运动学以及控制程序设计进行了分析研宄。 关键词:移动机器人;四轮独立驱动和转向; As one of the important branch of mobile robotics, wheel mobile robot has long been paid attention to by the research people at home and abroad for its high load ability, positioning accuracy, high efficiency, simple control, etc. Mobile robot has close relation to many technologies such as control theory, computer technology, sensor technology, etc. Therefore, research on the mobile robot has important significance. KEYWORDS: Mobile Robot; Four Wheel Drive and Steering; 0 前言 机器人技术的发展对人类社会产生了深渊的影响。首先,机器人被使用在那控需要重复劳动的场合,它不仅能够很好的胜任人类的工作,还可以更有效、快捷地完成工作任务。其次,在一些危险、有毒等场合,机器人也被用来代替人类去完成相应的工作。最后,机器人被运用在那些人类暂时无法到达的地方,例如深海、空间狭窄等地方。 陆地移动机器人大致分为轮式移动机器人、腿式移动机器人、履带式移动机器人、跳跃式移动机器人等几种。其中轮式移动机器人以其承载能力强、驱动和控制简单、移动方便、定位精准、能源利用率高、现有研宄成果较多等良好的表现更受科研人员热捧,许多科研人员纷纷加入其中作进一步研究、探索。 本文使用45度麦克纳姆轮,四轮独立驱动形式工作,在平面内可以实现3自由度运动,它非常适合工作在空间狭窄、有限、对机器人的机动性要求高的场合中[1]。 1 工作原理 单独的麦克纳姆轮无法实现全方位移动,需要多个( 至少4个) 才能组成全方位移动平台。因此,有必要对全方位移动平进行运动学分析,以便为全方位移动平台控制算法提供理论依据。 图1是一种麦克纳姆轮,典型的采用4个麦克纳姆轮的全方位移动平台如图2所示,图中车轮斜线表示轮缘与地面接触辊子的偏置角度,滚子可以实现2自由度的运动,一个是绕车轴旋转的运动和一个绕滚子轴向的旋转运动。 以移动平台中心O点为原点建立 全局坐标系, 相对地面静止; 是车轮 i中心。在平面上,全方位移动平台具有 3 个自由度,其中心点O 速度车轮绕轮轴转动的角速度是,车轮中心的速度是,辊子速度是。 图1 麦克纳姆轮
移动机器人控制系统的发展方向
移动机器人控制系统的发展方向 摘要随着计算机技术、传感器技术的不断发展,对于机器人领域的发展具有一定的促进作用。而由于移动机器人具有能够自治与移动的特征,在机器人领域处于核心地位。在复杂、危险的环境中,移动机器人所发挥的作用是有目共睹的。对此,对当前国内外较为常见的移动机器人控制系统进行剖析,并在此基础上论述了该领域的未来发展方向。 【关键词】移动机器人控制系统发展方向 移动机器人属于能够自动执行工作任务的机器,不但能够按照事先编译的程序运行,同时人类还可对其指挥。当前主要被运用在生产业、建筑业以及航空航天领域,而该领域的发展情况直接关系到国家综合实力的提升速度,对此加强对移动机器人控制系统的发展情况,以及未来发展方向的研究势在必行。 1 国内外常见的移动机器人控制系统 相对于国内在移动机器人的研究状况,能够看出国外在该领域的研究是较早的,其中具有代表性的有Saphira、TeamBots以及ISR。而在国内方面,代表性的有OSMOR、ZJMR以及Agent。下面,便对较为常用的控制系统进行介绍:
1.1.1 Saphira控制系统 Saphira控制系统是移动机器人领域中最早的系统,是有SRI国际人工智能中心在1990年所研发的,此系统是基于本地感知空间的共享内存与黑板,来实现协调与通信进程。由于Saphira是采用C语言来进行开发的,同时支持Windows 与Unix系统,因此具有文档资料相对完整、系统资源占用少等特征。但是需注意的是,由于Saphira系统在定位方面无法达到当前的实际需求,因此运用是相对较少的。 1.1.2 TeamBots控制系统 本系统是基于Java包与Java应用程序而构建的,经过20余年的发展后,此系统截止到目前已经被运用到多种类型的机器人平台当中。除此之外,在适用的操作系统方面,其中具有代表性的有Windows、MacOS以及Linux等,因此其运用的范围是更加广泛的。 1.1.3 ISR控制系统 ISR是基于行为的控制模式,其中是有任务执行层、反映层以及推理层所构成的,是有CAS研究中心所研发的。其中,任务执行层的作用是执行推理层所传输的指令;反映层其中包含资源、控制器以及行为;推理层的功能是根据用户的指令来对决策进行制定。此外,ISR控制系统仅能够在Linux中进行操作,并且没有公开化使用。
移动机器人定位与地图创建(SLAM)方法
自主移动机器人同时定位与地图创建(SLAM)方法1.引言: 机器人的研究越来越多的得到关注和投入,随着计算机技术和人工智能的发展,智能自主移动机器人成为机器人领域的一个重要研究方向和研究热点。移动机器人的定位和地图创建是自主移动机器人领域的热点研究问题。对于已知环境中的机器人自主定位和已知机器人位置的地图创建已经有了一些实用的解决方法。然而在很多环境中机器人不能利用全局定位系统进行定位,而且事先获取机器人工作环境的地图很困难,甚至是不可能的。这时机器人需要在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。这就是移动机器人的同时定位与地图创建(SLAM) 问题,最先是由SmithSelf 和Cheeseman在1988年提出来的,被认为是实现真正全自主移动机器人的关键。SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。在SLAM中,机器人利用自身携带的传感器识别未知环境中的特征标志,然后根据机器人与特征标志之间的相对位置和里程计的读数估计机器人和特征标志的全 局坐标。这种在线的定位与地图创建需要保持机器人与特征标志之间的详细信息。近几年来,SLAM的研究取得了很大的进展,并已应用于各种不同的环境,如:室内环境、水下、室外环境。 2.SLAM的关键性问题 2.1地图的表示方式 目前各国研究者已经提出了多种表示法,大致可分为三类:栅格表示、几何信息表示和拓扑图表示,每种方法都有自己的优缺点。
栅格地图表示法即将整个环境分为若干相同大小的栅格,对于每个栅格各指出其中是否存在障碍物。这种方法最早由Elfes和Moravec提出,而后Elfes进行了进一步的研究。它的优点在于创建和维护容易,尽量的保留了整个环境的各种信息,同时借助于该地图,可以方便地进行自定位和路径规划。缺点在于:当栅格数量增大时(在大规模环境或对环境划分比较详细时),对地图的维护行为将变得困难,同时定位过程中搜索空间很大,如果没有较好的简化算法,实现实时应用比较困难。 几何信息地图表示法是指机器人收集对环境的感知信息,从中提取更为抽象的几何特征,例如线段或曲线,使用这些几何信息描述环境。该方法更为紧凑,且便于位置估计和目标识别。几何方法利用卡尔曼滤波在局部区域内可获得较高精度,且计算量小,但在广域环境中却难以维持精确的坐标信息。但几何信息的提取需要对感知信息作额外处理,且需要一定数量的感知数据才能得到结果。 拓扑地图抽象度高,特别在环境大而简单时。这种方法将环境表示为一张拓扑意义中的图(graph),图中的节点对应于环境中的一个特征状态、地点。如果节点间存在直接连接的路径则相当于图中连接节点的弧。其优点是: (1)有利于进一步的路径和任务规划, (2)存储和搜索空间都比较小,计算效率高, (3)可以使用很多现有成熟、高效的搜索和推理算法。 缺点在于对拓扑图的使用是建立在对拓扑节点的识别匹配基础上的,如当环境中存在两个很相似的地方时,拓扑图方法将很难确定这是否为同一点。 2.2不确定信息的描述
机器人最实用的10种传感器盘点
机器人最实用的10种传感器盘点 随着智能化的程度提高,机器人传感器应用越来越多。智能机器人主要有交互机器人、传感机器人和自主机器人3种。从拟人功能出发,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大进展,其它还有嗅觉、味觉、滑觉等,对应有多种传感器,所以机器人传感产业也形成了生产和科研力量。 内传感器 机器介机电一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(Arm)、手腕(Wrist)等安装在一起,完成位置、速度、力度的测量,实现伺服控制。 位置(位移)传感器 直线移动传感器有电位计式传感器和可调变压器两种。角位移传感器有电位计式、可调变压器(旋转变压器)及光电编码器三种,其中光电编码器有增量式编码器和绝对式编码器。增量式编码器一般用于零位不确定的位置伺服控制,绝对式编码器能够得到对应于编码器初始锁定位置的驱动轴瞬时角度值,当设备受到压力时,只要读出每个关节编码器的读数,就能够对伺服控制的给定值进行调整,以防止机器人启动时产生过剧烈的运动。 速度和加速度传感器 速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。利用位移的导数,特别是光电方法让光照射旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转角度,及利用圆盘制成有缝隙,通过二个光电二极管辨别出角速度,即转速,这就是光电脉冲式转速传感器。此外还有测速发电机用于测速等。 应变仪即伸缩测量仪,也是一种应力传感器,用于加速度测量。加速度传感器用于测量工业机器人的动态控制信号。一般有由速度测量进行推演、已知质量物体加速度所产生动力,即应用应变仪测量此力进行推演,还有就是下面所说的方法: 与被测加速度有关的力可由一个已知质量产生。这种力可以为电磁力或电动力,最终简化为对电流的测量,这就是伺服返回传感器,实际又能有多种振动式加速度传感器。
移动机器人控制系统设计
? 197 ? ELECTRONICS WORLD?技术交流 移动机器人控制系统设计 广东工业大学 侯晓磊 随着移动机器人在人们社会生活中的地位不断提高,设计一种 可靠、稳定的机器人控制系统越发的变得重要起来,以NI公司的MyRIO控制器以其安全可靠、编程开发简单而脱颖而出。本文基于上述控制器、L298N电机驱动芯片Labview设计一种移动机器人控制软硬件系统系统,经验证,该系统运行稳定、可靠、高效。 1.前言 新一轮科技革命引发新一轮产业革命。“互联网+制造”构建工业4.0,智能制造成为我国由制造大国向制造强国转变的关键一步,移动机器人作为智能制造中的一个组成部分,作用越发的变得举足轻重。本文给出一种以MyRIO+L298N+Labivew的移动机器人控制系统。 2.IN MyRIO控制器 NI myRIO是NI最新设计的嵌入式系统设计平台。NI myRIO中内含双核ARM Cortex-A9,实时性高,并且还可以便捷定制FPGA I/ O,给开发设计人员提供更好的设计复杂系统的平台。 NI myRIO作为可重配置控制器具有以下重要特点: 易于上手使用:引导性安装和启动界面可使开发人员更快地熟悉操作,协助开发人员快速了解工程概念,完成设计任务。编程设计简单,利用实时应用、内置WiFi等功能,开发人员可以实现远程部署应用,“无线”操控。 板载资源众多:有丰富的数字I/O接口,提供SPI串行外设接口、PWM脉宽调制输出端口、正交编码器输入端口、UART异步收发器端口和I2C总线接口、多个单端模拟输入、差分模拟输入和带参考的模拟输入等可供选择的资源。 另外,NI MyRIO还提供可靠性能较好的控制器保护电路,防止由于意外操作造成控制器不可恢复性损坏,总之,NI MyRIO为开发人员提供了一个编程简易,设计电路方便,不用刻意担心意外操作而影响控制器使用的平台。 3.L298N电机控制芯片 L298N是一种用来驱动电机的集成电路,可以较稳定的输出平稳电流和较强的功率。工作均电流为2A,最高可达4A,最高输出电压为50V,能够带动带有感性元件的负载。控制器可以直接通过输入输出口与电机驱动芯片联接,从而方便控制驱动芯片的输出。如将芯片驱动直流电机时,可以直接与步进电机相联接,通过调节控制器输出实现步进电机的的正反转功能当控制直流电机时,可以通过调节控制芯片的电压信号的极性,PWM波的占空比,从而实现直流电机转速和转向的调节。4.系统硬件部分设计 系统采用MyRIO整体框架,外围增设电机驱动电路、避障驱动电路、里程计电路、液晶显示电路、陀螺仪电路。通过MyRIO主控制发送控制信号驱动移动机器人运动,实时通过外围传感器获取位置信息反馈给主控制 器,然后控制器通过闭环系统调节当前位置以保证对目标位置的追踪。 图1 5.系统软件部分设计 系统软件部分采用经典控制理论的闭环控制系统,将电机、主控制器和外设传感器构成闭环系统,通过调节闭环统的参数,来使 移动机器人以较小偏差追踪按照预定轨迹。 图2 6.结束语 本文介绍了基于NI MyRIO控制器设计移动机器人控制系统,通过仿真和实物测试,能较好的完成对任务的追踪踪。 参考:From Student to Engineer:Preparing Future Innova-tors With the NI LabVIEW RIO Architecture https://www.360docs.net/doc/ae18135992.html,.2014-04-01;王曙光,袁立行,赵勇.机器人原理与设计.人民邮电出版社,2013 。
超声波传感器在移动机器人的应用(探测障碍物)
超声波传感器在移动机器人的应用(探测障碍物) 摘要:移动机器人通过各种传感器系统感知外界环境和自身状态,在复杂的环境自主移动并完成相应的任务,超声波传感器以其独有的特征而被青睐, 关键词:超声波传感机器人障碍物探测 前言: 随着机器人技术的发展,自主移动机器人以其灵活性和智能性等特点,在人们的生产生活中应用越来越广泛,移动机器人要获得自主行为,其最重要的任务之一是获取关于环境的知识。这是用不同的传感器测量并从那些测量中提取有意义的信息而实现的。视觉、红外、激光、超声波等传感器都在移动机器人中得到实际应用。超声波是一种在弹性介质中的机械振荡,有两种形式:横向振荡(横波)及纵和振荡(纵波)。在工业中应用主要采用纵向振荡。超声波可以在气体、液体及固体中传播,其传播速度不同。另外,它也有折射和反射现象,并且在传播过程中有衰减。在空气中传播超声波,其频率较低,一般为几十KHZ,而在固体、液体中则频率可用得较高。在空气中衰减较快,而在液体及固体中传播,衰减较小,传播较远。利用超声波的特性,可做成各种超声传感器,配上不同的电路,制成各种超声测量仪器及装置,并在通迅,医疗家电等各方面得到广泛应用。超声波传感器以其性价比高、硬件实现简单,成本低,不易受电磁、光线被测对象颜色烟雾影响等优点,在移动机器人感知系统中得到了广泛的应用。但是超声波传感器也存在一定的局限性,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,因此往往采用多个超声波传感器或采用其他传感器来补偿。 超声波传感器在移动机器人的应用 由于用超声波测量距离并不是一个点测量。超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪型衰减,左右约30°的扩散角,但对于移动机器人很难保证其自身运动姿态的稳定性,采用超声波传感器固定在移动机器人车身的探测方式,当移动机器人偏离平行墙面时,探测系统往往很难得到实际的距离。另外,超声波这种发散特性在应用于测量障碍物的时候,只能提供目标障碍物的距离信息,而不能提供目标的方向和边界信息。这些缺陷都大大限制了超声波传感器的实际应用和推广。 在移动机器人行走过程中,由于随时可能遇到障碍物,而且障碍物的大小、多少未知,所以能够顺利地到达目的地,本设计系统使用了两个超声波传感器进行检测现场的环境信息,使它们的信息能够相互补充。在超声波感应器检测过程中,若有一个检测到一个障碍物,另一个检测到另一个障碍物,做如下处理:如果两传感器同时检测到障碍物,那么认为是同一个物体;相反,如果两传感器不同时检测到障碍物时,那么认为是两个物体。显然,探测系统在角度上是离散的,存在一定的分辨力,很可能把两个相近的物体看成同一个物体,但这两种情况并不影响移动机器人的行走,因为当两种物体相近时,移动机器人不可能从它们的间隙中走过,因此,把它们看成是同一物体是合理的,至少可以减少计算的复杂性。 障碍物的信息包括:超声波传感器中心到障碍物的最短距离和障碍物相对于车体的方位,移动机器人运行过程中,实时采集每个方向上超声波传感器中心到障碍物边界距离,进行比较划分找到其中最短的距离及方位最为车体到障碍物的最短距离及方位。避障算法如下:移动机器人以某一速度前进,如果某一传感器检测的距离小于d,这个距离是预定义可编程的临界距离,那么机器人以某一
全方位轮式移动机器人控制器设计与实现
第25卷第2期 系统工程与电子技术 Systems Engineering and E lectronics V ol 125,N o 122003 收稿日期:2001-12-04 修订日期:2002-04-15 作者简介:杨福广(1974-),男,硕士研究生,工程师,主要研究方向为机器人控制。 文章编号:10012506X (2003)022******* 全方位轮式移动机器人控制器设计与实现 杨福广1,周风余1,侯宏光2 (1.山东科技大学机器人研究中心,山东济南250031;2.海军潜艇学院,山东青岛266071) 摘 要:全面介绍了一种全方位移动机器人的控制系统体系结构及软件的控制策略,包括采用的超声和激光传感器系统、网络化无线通讯系统、基于上下位机的计算机控制系统等方面。重点介绍了基于LM628的系统的伺服控制方法,并给出了机器人运动实验的结果,证明了系统的可行性。该系统适合在非结构化动态环境中进行分布式多Agnet (智能体)、多机器人的协作与协调、移动机器人路径规划与避碰等研究。 关键词:移动机器人;控制器;传感器中图分类号:TP24 文献标识码:A Design and R ealization of the Controller for the Mobile R obot With Full Mobility Y ANG Fu 2guang 1,ZH OU Feng 2yu 1,H OU H ong 2guang 2 (1.Shandong University o f Science &Technology ,Jinan 250031,China ; 2.Navy Submarine Academy ,Qingdao 266071,China ) Abstract :T he system con figuration of hardware and control strategy for rob ot with full m obility is introduced.T he sens or system including ultras onic and laser ,wireless communication system using netw ork and the control system based on master 2slave com puter are presented.T he serv o control meth od that based on LM628is introduced and the result which proves the feasibility is given.T his system is adapted to study distributed muti 2agent ,the cooperation and harm ony of muti 2rob ot ,path plan and obstacle av oidance of m obile rob ot in n one con figuration dynamic circumstance. K eyw ords :M obile rob ot ;C ontroller ;Sens or 1 引 言 近年来随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。轮式移动机器人 (W MR )可以作为各种智能控制方法(包括动态避障、群体协 作策略)的良好载体,同时又可以方便地构成网络化的分布式系统,开展多智能体的调度、规划等研究,所以对它的研究越来越受到重视。 本文全面介绍了一种全方位移动机器人的控制系统体系结构,包括传感器、通讯、伺服控制系统等,并给出了实验结果,证明了系统的可行性。 2 移动机器人的计算机控制系统的硬件 结构及工作原理 由于机器人不断移动的需要,系统采用充电电池供电。机器人硬件平台由两台工业PC 机、一块由LM628构成的伺服板、三个PW M 放大器和直流伺服电机组成。其结构框图如图1所示。系统可以分成以下四个模块:监控模块、感知 模块、路径规化和逆运动学计算模块、执行模块。 (1)监控模块 该模块的功能通过监控计算机来实现,在Win98下用 Visual C ++6.0开发,主要功能包括: ①任务描述 利用操作者规定的语言,描述对机器人的控制任务。 ②监控指令输入 在机器人完成任务的过程当中,操作者根据任务的执行情况以及环境的状况,对系统进行适当的干预,以充分发挥人的智能,构成人-机合作系统。如遇到不可避开的障碍、或者多个机器人运动过程中发生死锁等意外情况,都需要操作者适时的干预。 ③文本和图形的显示界面 以文本或者图形的方式实时地显示机器人系统的工作信息,包括当前正在执行的任务,机器人的位置、速度、障碍物等环境信息。 监控计算机是通过无线网络与每一个移动机器人取得联系的。 (2)感知模块 传感器作为机器人的感知部分,是机器人具有自主能力的重要前提条件。在W MR 系统中,共有三种传感器:超声、
移动机器人视觉定位设计方案
移动机器人视觉定位设计方案 运动视觉研究的是如何从变化场景的一系列不同时刻的图像中提取出有关场景中的目标的形状、位置和运动信息,将之应用于移动机器人的导航与定位。首先要估计出目标的空间位置和运动信息,从而为移动机器人车体的导航与定位提供关键前提。 视觉信息的获取主要是通过单视觉方式和多视觉方式。单视觉方式结构简单,避免了视觉数据融合,易于实现实时监测。如果利用目标物体的几何形状模型,在目标上取3 个以上的特征点也能够获取目标的位置等信息。此方法须保证该组特征点在不同坐标系下的位置关系一致,而对于一般的双目视觉系统,坐标的计算误差往往会破坏这种关系。 采用在机器人上安装车载摄像机这种局部视觉定位方式,本文对移动机器人的运动视觉定位方法进行了研究。该方法的实现分为两部分:首先采用移动机器人视觉系统求出目标质心特征点的位置时间序列,从而将对被跟踪目标的跟踪转化为对其质心的跟踪;然后通过推广卡尔曼滤波方法估计目标的空间位置和运动参数。 1 目标成像的几何模型 移动机器人视觉系统的坐标关系如图1 所示。 其中O-X Y Z 为世界坐标系;O c - X cY cZ c 为摄像机坐标系。其中O c 为摄像机的光心,X 轴、Y 轴分别与X c 轴、Y c 轴和图像的x ,y 轴平行,Z c 为摄像机的光轴,它与图像平面垂直。光轴与图像平面的交点O 1 为图像坐标系的原点。O cO 1 为摄像机的焦距f 。 图1 移动机器人视觉系统的坐标关系 不考虑透镜畸变,则由透视投影成像模型为:
式中,Z′= [u,v ]T 为目标特征点P 在图像坐标系的二维坐标值;(X ,Y ,Z )为P 点在世界坐标系的坐标;(X c0,Y c0,Z c0)为摄像机的光心在世界坐标系的坐标;dx ,dy 为摄像机的每一个像素分别在x 轴与y 轴方向采样的量化因子;u0,v 0 分别为摄像机的图像中心O 1 在x 轴与y 轴方向采样时的位置偏移量。通过式(1)即可实现点P 位置在图像坐标系和世界坐标系的变换。 2 图像目标识别与定位跟踪 2.1 目标获取 目标的获取即在摄像机采集的图像中搜索是否有特定目标,并提取目标区域,给出目标在图像中的位置特征点。 由于机器人控制实时性的需要,过于耗时的复杂算法是不适用的,因此以颜色信息为目标特征实现目标的获取。本文采用了HS I 模型, 3 个分量中,I 是受光照影响较大的分量。所以,在用颜色特征识别目标时,减少亮度特征I 的权值,主要以H 和S 作为判定的主要特征,从而可以提高颜色特征识别的鲁棒性。 考虑到连通性,本文利用捕获图像的像素及其八连通区域的平均HS 特征向量与目标像素的HS特征向量差的模是否满足一定的阈值条件来判别像素的相似性;同时采用中心连接区域增长法进行区域增长从而确定目标区域。图2 给出了目标区域分割的算法流程。
多传感器的移动机器人可定位性估计与自定位
第12卷第4期 智 能 系 统 学 报 Vol.12?.4 2017年8月 CAAI Transactionson IntelligentSystems Aug.2017DOI:10.11992/tis.201607007 网络出版地址:http://kns.cnki.net/kcms/detail /23.1538.tp.20170407.1734.002.html 多传感器的移动机器人可定位性估计与自定位 孙自飞1,钱堃1,2,马旭东1,2,戴先中1,2 (1.东南大学自动化学院,江苏南京210096;2.复杂工程系统测量与控制教育部重点实验室,江苏南京210096) 摘 要:针对有人干扰的动态室内环境,利用可定位性估计理论提出一种RGB?D 传感器辅助激光传感器的移动机器人可靠自定位方法三利用RGB?D 传感器信息快速检测人的位置区域,并通过坐标转换计算激光扫描数据中的动态障碍物影响因子,结合离散化Fisher信息矩阵在线估计观测信息的可定位性矩阵;同时通过预测模型协方差矩阵评价里程计信息的可靠性,从而动态补偿观测信息对粒子集的影响三在典型含多人运动的动态室内环境中实验,结果验证了本文方法能够提高机器人自定位的准确性和可靠性三 关键词:动态环境;自主定位;RGB?D 传感器;Fisher信息矩阵;人体检测;可定位性;在线估计;移动机器人 中图分类号:TP24 文献标志码:A 文章编号:1673-4785(2017)04-0443-07 中文引用格式:孙自飞,钱堃,马旭东,等.多传感器的移动机器人可定位性估计与自定位[J].智能系统学报,2017,12(4):443-449.英文引用格式:SUNZifei,QIANKun,MAXudong,etal.Self?localizationofmobilerobotindynamicenvironmentsbasedonlocalizabilityestimationwithmulti?sensorobservation[J].CAAItransactionsonintelligentsystems,2017,12(4):443-449. Self?localizationofmobilerobotindynamicenvironmentsbasedonlocalizabilityestimationwithmulti?sensorobservation SUN Zifei 1,QIAN Kun 1,2,MA Xudong1,2,DAI Xianzhong1,2 (1.School of Automation,SoutheastUniversity,Nanjing210096,China;2.KeyLaboratoryof MeasurementandControl of Complex Systemsof Engineering,Ministryof Education,Nanjing210096,China)Abstract:Basedon thelocalizabilityestimation theory,in thispaper,weproposeanew methodforthereliableself?localization of mobilerobotsin adisturbeddynamicindoorenvironmentbytheadoption of an RGB?D sensortoassistthelaserscanner.People slocation areasarerapidlydetectedin RGB -D data,which arethen transformedtothelasersensorcoordinatetocomputetheinfluenceof thedynamicobstacleson thelaserdata.In combination with thediscreteFisherinformation matrix,weestimatethelocalizabilitymatrix of theobservation information online.In addition,weassessthereliabilityof theinformation in odometersbythecovariancematrix of theprediction model,therebydynamicallycompensatingfortheeffectof theobservation information on theparticleset.Weconductedexperimentsin adynamicindoorenvironmentandtheresultsconfirm theaccuracyandreliabilityof theproposedrobotlocalization method.Keywords:dynamicenvironment;self?localization;RGB?D sensor;Fisherinformation matrix;people?detecting;localizability;onlineestimation;mobilerobot 收稿日期:2016-07-08. 网络出版日期:2017-04-07. 基金项目:国家自然科学基金项目(61573100,61573101);中央高校基 本科研业务费专项基金(2242013K30004).通信作者:钱堃.E?mail:kqian@seu.edu.cn. 服务机器人长期工作在与人共处的环境中,针对采用车载激光二视觉等各种传感器实现的机器人 自定位,人的运动会对其定位的准确性造成影响, 甚至导致定位失败三 以往解决方法大多从改进算法本身入手,由于 经典粒子滤波算法无法补偿动态环境中未建模障碍物对机器人定位产生的干扰,R.Valencia等[1]在经典的蒙特卡罗定位的基础上利用已知的静态地图和在感知更新阶段建立的短期地图进行基于正态分布变换[2]的蒙特卡罗定位,以补偿环境发生短期变化时对定位精度产生的干扰,该算法满足实时性并具有一定的鲁棒性,但是没有考虑静态地图发生永久性变化的情况三J.R?wek?mper等[3]将蒙特万方数据
三轮全向机器人原理及matlab仿真解读
计算机辅助设计报告 三轮全向移动机器人 运动控制仿真 2 余杨广 2 沈阳 2 陈斌 人员分工: 余杨广:总体负责,系统理解及控制器设计,PPT制作,后期报告审查及修改 陈斌:PPT制作,报告撰写 沈阳:资料收集,辅助其余两人完成任务
目录 一、实验目的 (3) 二、实验原理 (3) 2.1控制对象——三轮全向机器人 (3) 2.2 控制系统结构 (4) 三、实验内容 (5) 3.1电机模型 (5) 3.1.1物理建模 (5) 3.1.2 Simulink模块搭建 (6) 3.1.3无刷直流电机仿真模型的验证 (9) 3.2运动学模型 (10) 3.2.1物理建模 (10) 3.2.2 Simulink模块搭建 (11) 3.3 路径规划 (12) 3.4. 传感器设计 (13) 3.5.控制器设计 (13) 3.5.1 电机控制器设计 (13) 3.5.2 运动控制器设计 (15) 3.6 观测器 (19) 四、结果验收 (20) 4.1 x轴方向的误差 (20) 4.2 y轴方向的误差 (20) 4.3 前进方向偏角 (21) 4.4 速度误差 (21) 五、致谢 (22) 六、附录(路径规划函数) (22)
一、实验目的 (一)建立三轮全向机器人系统的数学模型,然后基于simulink建立该系统的仿真模型并设计控制器,最终满足控制要求; (二)控制的最终目的是使该机器人能够良好跟踪预期的运动轨迹; (三)通过对复杂系统的分析、建模、仿真、验证,全面提高利用计算机对复杂系统进行辅助设计的能力; (四)通过集体作业、分工完成任务的方式培养团队意识,提高团队集体攻关能力 二、实验原理 2.1控制对象——三轮全向机器人 三轮全向移动机器人其驱动轮由三个全向轮组成,径向对称安装,各轮互成120°角,滚柱垂直于各主轮。三个全向轮的大小和质量完全相同,而且由性能相同的电机驱动。