C语言实现本科生导师制问题
(2)本科生导师制问题
①问题描述
在高校的教学改革中,有很多学校实行了本科生导师制。一个班级的学生被分给几个老师,每个老师带n个学生,如果该老师还带研究生,那么研究生也可直接带本科生。本科生导师制问题中的数据元素具有如下形式:
导师带研究生
(老师,((研究生1,(本科生1,…,本科生ml)),(研究生2,
(本科生1,…,本科生m2))…))
导师不带研究生
(老师,(本科生1,…,本科生m))
导师的自然情况只包括姓名、职称;研究生的自然情况只包括姓名、班级;本科生的自然情况只包括姓名、班级。
②基本要求
要求完成以下功能:
建立:建立导师广义表。
插入:将某位本科生或研究生插入到广义表的相应位置。
删除:将某本科生或研究生从广义表中删除。查询:查询导师、本科生
(研究生)的情况。统计:某导师带了多少个研究生和本科生。输出:将
某导师所带学生情况输出。
退出:程序结束。
③设计提示
本实验使用的数据结构是广义表,广义表采用头尾链表存储结构来实现。定义教师、学生结点结构体如下:
typedef struct GLNode
{
char name[100]; /*教师或学生的姓名*/
char prof[100]; /*教师结点表示职称,学生结点表示班级*/
int type; /*结点类型:0-教师,1-研究生,2-本科生*/
struct {struct GLNode *hp, *tp;} ptr;
/*hp指向同级的下一结点,tp指向下级的首结点*/ }GList;
人员信息的表示形式为:高老师-教授-0、李刚-二班-1、李明-二班-2.
人员信息中的姓名、职称、班级、人员类型用“-”隔开,如高老师-教授-0, “咼老师”表示姓名,“教师”表示职称,“ 0”表示人员的类型是教师;李刚- 二班-1,“李刚”表示姓名,“二班”表示班级,“1”表示人员的类型是研究生;
李明-二班-2,“李明”表示姓名,“二班”表示班级,“2”表示人员的类型是本科生。
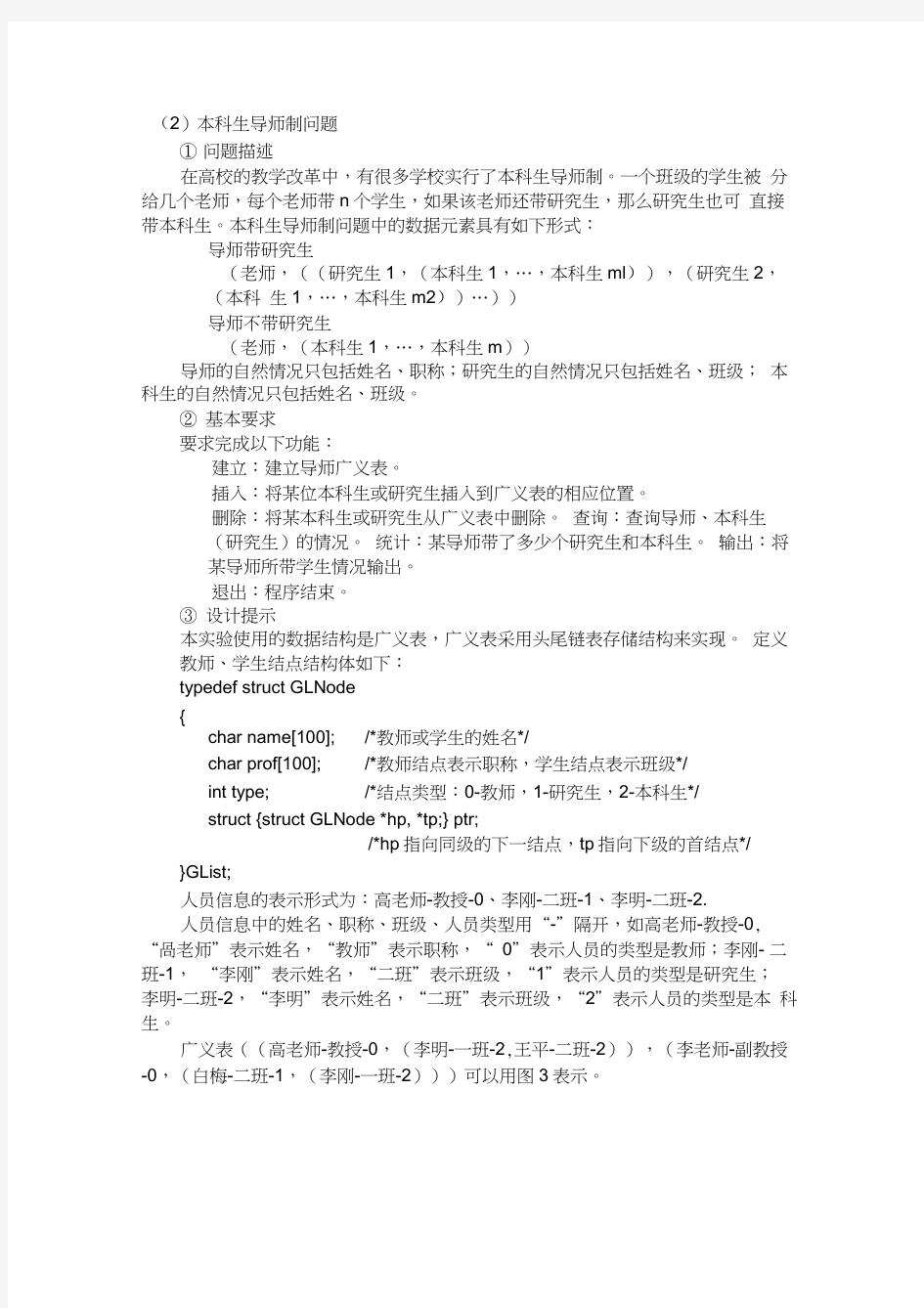
广义表((高老师-教授-0,(李明-一班-2,王平-二班-2)),(李老师-副教授-0,(白梅-二班-1,(李刚-一班-2)))可以用图3表示。
图3导师制用广义表实现示例
源代码:
#in clude
#in clude
#in clude
typedef struct GLNode //定义存储中缀表达式的结点类型
{char name[100];
char prof[100];
int type;
struct {struct GLNode *hp,*tp;}ptr; /*hp指向同级的下一结点,tp指向下级的首结点*/ }GList;
GList *GListCreate() 〃建立广义表
{GList *head,*p,*q,*s,*r; //简要介绍:head指向头结点;p指向导师结点;q指向研究生结点丁指向本科生节点;s指向新建立的节点
int i,j,b;
char str[100];
b=1;
head=p=q=r=s=NULL;
while(b)
{printf("请输入人员信息");
sca nf("%s",str);
s =(GList *)malloc(sizeof(GList));
if(!s) printf("申请空间失败!");
for(j=0,i=0;str[i] != '-';j++,i++) 〃将字符串中的学生信息转化成学生结点s->n ame[j] = str[i];
s_>n ame[j] = '\0';
i=i+1;
for(j=0;str[i] != '-';j++,i++)
s->prof[j] = str[i];
s->prof[j] = '\0';
i=i+1;
s->type = str[i] - 48;
s->ptr.hp=NULL;
实验八 利用快速傅里叶变换(FFT)实现快速卷积(精选、)
实验八 利用FFT 实现快速卷积 一、 实验目的 (1) 通过这一实验,加深理解FFT 在实现数字滤波(或快速卷积)中的重要作用,更好的利用FFT 进行数字信号处理。 (2) 进一步掌握循环卷积和线性卷积两者之间的关系。 二、 实验原理与方法 数字滤波器根据系统的单位脉冲响应h(n)是有限长还是无限长可分为有限长单位脉冲响应(Finite Impulse Response )系统(简记为FIR 系统)和无限长单位脉冲响应(Infinite Impulse Response )系统(简记为IIR 系统)。 对于FIR 滤波器来说,除了可以通过数字网络来实现外,也可以通过FFT 的变换来实现。 一个信号序列x(n)通过FIR 滤波器时,其输出应该是x(n)与h(n)的卷积: ∑+∞ -∞ =-= =m m n h m x n h n x n y )()()(*)()( 或 ∑+∞ -∞ =-= =m m n x m h n x n h n y ) ()()(*)()( 当h(n)是一个有限长序列,即h(n)是FIR 滤波器,且10-≤≤N n 时 ∑-=-=1 0) ()()(N m m n x m h n y 在数字网络(见图6.1)类的FIR 滤波器中,普遍使用的横截型结构(见下图6.2 图6.1 滤波器的数字网络实现方法 图6.2 FIR 滤波器横截型结构 y(n) y(n) -1-1-1-1
应用FFT 实现数字滤波器实际上就是用FFT 来快速计算有限长度列间的线性卷积。 粗略地说,这种方法就是先将输入信号x(n)通过FFT 变换为它的频谱采样 值X(k),然后再和FIR 滤波器的频响采样值H(k)相乘,H(k)可事先存放在存储器中,最后再将乘积H(k)X(k)通过快速傅里叶变换(简称IFFT )还原为时域序列,即得到输出y(n)如图6.3所示。 图6.3 数字滤波器的快速傅里叶变换实现方法 现以FFT 求有限长序列间的卷积及求有限长度列与较长序列间的卷积为例来讨论FFT 的快速卷积方法。 (1) 序列)(n x 和)(n h 的列长差不多。设)(n x 的列长为1N ,)(n h 的列长为2N ,要求 )()(n x n y =N ∑-=-==1 ) ()()(*)()(N r r n h r x n h n x n h 用FFT 完成这一卷积的具体步骤如下: i. 为使两有限长序列的线性卷积可用其循环卷积代替而不发生混叠,必须选择循环卷积长度121-+≥N N N ,若采用基2-FFT 完成卷积运 算,要求m N 2=(m 为整数)。 ii. 用补零方法使)(n x ,)(n h 变成列长为N 的序列。 ?? ?-≤≤-≤≤=10 10)()(11N n N N n n x n x ?? ?-≤≤-≤≤=10 1 0)()(22N n N N n n h n h iii. 用FFT 计算)(),(n h n x 的N 点离散傅里叶变换 )()(k X n x FFT ??→? )()(k H n h FFT ??→? iv. 做)(k X 和)(k H 乘积,)()()(k H k X k Y ?= v. 用FFT 计算)(k Y 的离散傅里叶反变换得 y(n)
在线书店系统的设计与实现--优秀毕业设计论文
毕业论文 姓名: 班级: 系部: 专业: 论文题目:在线书店系统的设计与实现 指导教师: 职称: 2013年7月
目录 前言 (3) 需求分析 (5) 一、用户需求分析 (5) 1.图书查询需求 (5) 2.购物车管理需求 (5) 3.订单处理需求 (5) 4.管理员与客户的分类功能 (5) 系统开发技术 (7) 一、MVC模式简介 (7) 1.电子商务概况摘要 (8) 系统总体设计 (10) 1.UML活动关系图 (10) 2.系统组成 (11) 3.功能设计 (11) (1)图书信息管理 (11) (2)购物车管理 (11) (3)会员注册 (11) (4)订单处理 (12) 数据库设计与实现 (13) 一、数据库的需求分析 (13) 1.数据库的逻辑设计 (13) 2.数据表基本结构 (15) 3.创建数据表脚本 (16) 系统实现过程 (18) 开发平台 (18) 一、系统各组件实现 (18) 用户表示层 (18) 系统测试与运行 (27)
一、系统测试 (27) 二、测试结果 (27) 结论 (30) 参考文献 (31) 谢辞 (32)
前言 随着Internet信息技术的高速发展和个人、企业上网的迅速普及,企业的WWW网站在商业活动中发挥着越来越大的作用,在信息时代,建立一个功能强大、界面美观的电子商务网站,建立电子商务系统平台,对企业的发展是至关重要的。 所谓电子商务,是指各种具有商业活动能力的实体(生产企业、商贸企业、金融机构、政府机构、个人消费者等)利用网络和先进的数字化传媒技术进行的各项商业贸易活动。其中特别要强调的特点,一是其商业背景,二是网络化和数字化。简言之,电子商务就是通过电子网络渠道达成的商务活动。 电子商务是计算机网络的第二次革命,它通过电子手段建立新的经济秩序,不仅涉及电子技术和商业交易本身,而且涉及诸如金融、税务、教育等社会其他层面。对于电子商务的研究始于20世纪70年代末,而其实施要更晚些,实施又分为两步,其中电子数据交换(Electronic Data Interchange,EDI)始于20世纪80年代中期,Internet上的电子商务始于20世纪90年代初期。电子商务活动相应分成两大类:企业组织-企业组织(Business-Business,B2B)型和企业组织-消费者(Business-Consumer,B2C)型。根据统计,目前电子商务活动中80%的收属于B2B型商务活动,这由于企业组织的信息化程度和技术水平比个体消费者明显要高,主要面向的是企业与企业,为企业提供进行采购、销售和结算等业务的平台。B2C则是我们最熟悉的,它直接面向终端的大众消费者。它通常也有两种形式,一种是类似一个大的超市,里面摆放着大量的商品,提供给消费者直接去选择购买;而另一种形式则类似一个大商城,商城中有许多柜台,用户可以直接到柜台选择和购买自己中意的东西,然后去结算,这种商城只提供柜台和相关的服务,并收取相应的柜台使用费。 一般意义上,一个完整的电子商务系统包括信息流、资金流与物流三个要素,三者相辅相成。信息流就是通过电子网络向客户揭示所售商品的相关信息,引导客户通过网络进行购物。资金流就是使客户在选择商品后,能够通过网络支付相关费用,一般包括预付款支付、网上银行支付、货到付款
基于模糊控制的速度跟踪控制问题(C语言以及MATLAB仿真实现)
基于模糊控制的速度控制 ——地面智能移动车辆速度控制系统问题描述 利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门(throttle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。 算法思想 模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 Figure 1模糊控制器的结构图 模糊控制的优点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。 模糊控制的缺点
C语言实现FFT(快速傅里叶变换)
C语言实现FFT(快速傅里叶变换) 函数原型:空快速傅立叶变换(Struct Compx *xin,Intn) 函数函数:对输入复数组执行快速傅立叶变换(FFT)输入参数:*xin复结构组的第一个地址指针。结构输出参数:no * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *结构compx u,w,t。 nv2 =快速傅立叶变换_ N/2;nm1 =快速傅立叶变换_ N-1;(I = 0;i
Matlab傅里叶变换傅里叶逆变换-FFT-IFFT
Matlab傅里叶变换傅里叶逆变换 %% 信号经过傅里叶变换然后进行傅里叶逆变换后信号的变化 clear all;clc; %------Author&Date------ %Author: %Date: 2013/07/31 %========================================================================== Fs=8e3; %采样率 t=0:1/Fs:1; %采样点 len=length(t); %采样长度 f1=10; %频率1 f2=100; %频率2 f3=1000; %频率3 A1=1; %幅度1 A2=0.8; %幅度2 A3=0.3; %幅度3 MaxS=A1+A2+A3; %信号幅度的最大值 signal=A1*sin(2*pi*f1*t)+A2*sin(2*pi*f2*t)+A3*sin(2*pi*f3*t); X=fft(signal,len); %傅里叶变换 magX=abs(X); %信号的幅度 angX=angle(X); %信号的相位 Y=magX.*exp(1i*angX); %信号的频域表示 y=ifft(Y,len); %信号进行傅里叶逆变换 y=real(y); er=signal-y; %原始信号和还原信号的误差 subplot(311);plot(t,signal);axis([0 1 -MaxS MaxS]);xlabel('时间');ylabel('振幅');title('原始信号'); subplot(312);plot(t,y);axis([0 1 -MaxS MaxS]);xlabel('时间');ylabel('振幅');title('还原信号'); subplot(313);plot(t,er);xlabel('时间');ylabel('振幅');title('误差'); % End Script
即时通讯系统的设计与实现毕业设计论文
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。 学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据 库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期:
PWM调速的C语言程序编写
PWM调速的C语言程序编写 关于PWM的原理在上一篇文章中已经说的很详细了,现在就细说一下pwm C语言程序的编写。 C语言中PWM的编写有这么几种方法;一、用普通的I/O口输出的PWM ,二、使用定时计数器编写,三、就是使用片内PWM了。 1 先说使用普通的I\O口编写PWM程序了。 使用I/O口输出PWM波形你必须首先明白PWM他的实质是:调制占空比,占空比就是波形中高电平的长度与整个波长的比值。我们写C语言的目的是写PWM波形的一个周期。在这个周期内高低电平的比值是可以改变的。这也就符合了PWM的原意脉宽调制。即高电平的宽度的调制。当然了PWM他也可用于改变频率,我们这里只先说他改变脉宽。 一旦我们的C语言程序写完那么他产生的PWM波形的频率就一定了。(也可写频率变化的PWM,难度有点大)一般我们控制使用1K到10K的PWM波进行控制。当然了你也可在要求不是很高的地方使用频率更低的PWM波。比如在飞思卡尔智能车比赛中我们学校使用的PWM波频率只有600HZ. 我们要改变一个PWM波周期内的高电平的宽度显然需要将一个PWM波的周期分成单片机可以控制的N个小的周期,N的
取值越大你的调速等级越高,但产生的PWM频率就越低。我们下面以实现100级调速为例编写PWM程序。 先写出程序再慢慢给大家分析 void pwm (uchar x,uint y) //X 为占空比 Y为函数使用时间 { uint i,j,a,b; for(i=y;i>0;i--) //定时外函数 { for(j=7;j>0;j--) //定时内函数 { for(a=y;a>0;a--) //PWM波高电平宽度 { PORTA=0X01; }
快速傅里叶变换FFT的FPGA设计与实现--电科1704 郭衡
快速傅里叶变换FFT的FPGA设计与实现 学生姓名郭衡 班级电科1704 学号17419002064 指导教师谭会生 成绩 2020年5 月20 日
快速傅里叶变换FFT 的设计与实现 一、研究项目概述 非周期性连续时间信号x(t)的傅里叶变换可以表示为:= )(?X dt t j e t x ? ∞ ∞ --1 )(?,式中计算出来的是信号x(t)的连续频谱。但是,在实际的控制系统中能够式中计算出来的是信号x(t)的连续频谱。但是,在实际的控制系统中能够算信号x(t)的频谱。 有限长离散信号x(n),n=0,1,…,N-1的DFT 定义为: ∑-=-=-==1 02,1.....10)()(N n N j N kn N e W N k W n x K X π、、。 可以看出,DFT 需要计算大约N2次乘法和N2次加法。当N 较大时,这个计算量是很大的。利用WN 的对称性和周期性,将N 点DFT 分解为两个N /2点的DFT ,这样两个N /2点DFT 总的计算量只是原来的一半,即(N /2)2+(N /2)2=N2/2,这样可以继续分解下去,将N /2再分解为N /4点DFT 等。对于N=2m 点的DFT 都可以分解为2点的DFT ,这样其计算量可以减少为(N /2)log2N 次乘法和Nlog2N 次加法。图1为FFT 与DFT-所需运算量与计算点数的关系曲线。由图可以明显看出FFT 算法的优越性。 图1 FFT 与DFT 所需乘法次数比 较
X[1] 将x(n)分解为偶数与奇数的两个序列之和,即x(n)=x1(n)+x2(n)。 x1(n)和x2(n)的长度都是N /2,x1(n)是偶数序列,x2(n)是奇数序列,则 ∑∑=--=-=+2 )12(120 2)1.....,0()(2)(1)(N n k n N N n km N N k W n x W n x K X 所以)1...,0()(2)(1)(12 22120 -=+=∑∑-=-=N k W n x W W n x K X N n km N k N km N N n 由于km N N j km N j km N W e e W 2/2 /2222===--ππ ,则 )1.....,0)((2)(1)(2)(1)(12 2/120 2/-=+=+=∑∑-=-=N k k X W k X W n x W W n x K X k N N n km N k N N n kn N 其中X1(k)和X2(k)分别为x1(n)和x2(n)的N /2点DFT 。由于X1(k)和X2(k)均以N /2为周期,且WNk+N/2=-WNk ,所以X(k)又可表示为: )12/....,1,0)((2)(1)(-=+=N k k X W k X K X k N )12/....,1,0)((2)(1)2/(-=-=+N k k X W k X N K X k N
matlab-离散信号傅里叶变换
1.请用MATLAB编写程序,实现任意两个有限长度序列的卷积和。要求用图 形显示两个序列及卷积结果。 解:y(n)=∑x(i)h(n-i) 假设x(n)={1,2,3,4,5}; h(n)={3,6,7,2,1,6}; y(n)=x(n)*h(n) 验证:y[n]=[1,12,28,46,65,72,58,32,29,30] 【程序】 N=5 M=6 L=N+M-1 x=[1,2,3,4,5] h=[3,6,7,2,1,6] y=conv(x,h) nx=0:N-1 nh=0:M-1 ny=0:L-1 subplot(131);stem(nx,x,'*b');xlabel('n');ylabel('x(n)');grid on subplot(132);stem(nh,h,'*b');xlabel('n');ylabel('h(h)');grid on subplot(133);stem(ny,y,'*r');xlabel('n');ylabel('y(h)');grid on 【运行结果】
2.已知两个序列x[n]=cos(n*pi/2), y[n]=e j*pi*n/4x[n],请编写程序绘制 X(e jw)和Y(e jw)和幅度和相角,说明它们的频移关系。 –提示:用abs函数求幅度,用angle求相角。 【程序】 n=0:15; x=cos(n*pi/2); y=exp(j*pi*n/4).*x; X=fft(x); Y=fft(y); magX=abs(X); angX=angle(X); magY=abs(Y); angY=angle(Y); subplot(221);stem(n,magX,'*r');xlabel('频率');ylabel('幅度');grid on; subplot(222);stem(n,angX,'*b');xlabel('频率');ylabel('相位');grid on; subplot(223);stem(n,magY,'*r');xlabel('频率');ylabel('幅度');grid on; subplot(224);stem(n,angY,'*b');xlabel('频率');ylabel('相位');grid on;
论文管理系统的设计与实现
论文管理系统的设计与实现 1绪论 1.1引言 1.1引言 随着时代的进步,网络已经成为人们生活中不可缺少的一部分。人们对网络经历了由陌生到熟悉的过程,网络为人们的生活、学习、工作提供了极大的方便。高等学校可以通过网络了解教育动态,发布教育信息,进行网络化管理。教师可以通过网络获得教学资源,进行教学经验交流,开展网络教学。借助于网络环境下的管理软件完成复杂的管理工作是目前软件开发的一个重要课题。学校、企业、事业单位的管理系统、信息系统几乎无处不在,这些软件不但具有对相应的事务进行管理的功能,而且使用起来简单、方便,简化了工作流程,提高了工作效率。 在Internet普及的今天,绝大多数高等学校建立了自己的校园网站。学校通过网站可以展示教育成果,发布教育信息,与学生和家长进行交流和沟通,与其它院校建立联系,了解全球教育动态,开展网络教学活动等。基于网络环境的管理系统是构成学校数字化校园的一个重要组成部分。校园网担负着双重作用,一方面可以用来动态发布教育和科研信息,对学校事务进行管理;另一方面又可以及时向学生、家长及社会征求意见,进行课堂外的互动,促进学校教育的发展。 1.2研究意义 本课题来源于高校对毕业论文管理系统的实际需要,目标是提高院系对毕业生毕业设计全程监控、对毕业设计前期、中期、后期工作情况进行检查等相关工作的效率,并围绕此管理目标对系统所需要的各毕业生基本信息、课题基本信息、学生毕业设计完成情况基本信息、指导教师指导情况基本信息、系统后台数据库等进行管理和维护。系统开发的总体任务是实现毕业论文整个进程管理工作的流程化、系统化和规范化。 本课题涉及的知识有:面向对象程序设计,计算机网络基础,Web程序设计(熟悉https://www.360docs.net/doc/b27351832.html,),网页制作基础(熟悉网页制作工具软件),数据库原理,https://www.360docs.net/doc/b27351832.html,集成开发环境,SQLServer数据库,信息管理系统等。
最新五种编程方式实现流水灯的单片机c程序讲课教案
五种编程方式实现流水灯的单片机C程序 //功能:采用顺序结构实现的流水灯控制程序 /*此方式中采用的是字操作(也称为总线操作)*/ #include
电动车控制器C语言源代码
电动车控制器C语言源代码 . #define _E_BIKE_W79E83X_C_ #include "intrins.h" #include "E_BIKE_W79E83X.H" #include"W79E834.h" /******************************************************************** ********* * 主函数 ******************************************************************** * *********/ void main(void) { Init(); // 初始化 Init_IO(); // 初始化端口 H_Sample(); // 霍尔信号采样 Phase_Change(); // 相位变换 AutoHelpEN(1,0x1AA,200); /* 第一个参数设定助力功能允许不否,1为允许,0为禁止 第二个参数设定助力力量(PWM占空比),数值围:0~0x355,数值越大,力量 越大 第三个参数设定助力时间,数值越大,时间越长 */
Keep_SpeedEN(1,0x20,6); /* 第一个参数设定定速巡航功能允许不否,1为允许,0为禁止第二个参数设定定速巡航最低速设置 . . 第三个参数设定在巡航点保持多长时间后才进入巡航 */ Current_Lim(0xB48); /* 过流保护上限值设定 0xB00对应限电流最大大约为2.6A 0xB80对应限流值最大大约为3.8A */ LowVoltage_Lim(0x9B0); /* 欠压保护下限值设定 电池电压为47.9V时ADC采样值为0xB6 ==> 0xB60 推算电池电压为41V时的采样值为0x9B ==> 0x9B0 推算电池电压为40V时的采样值为0x98 ==> 0x980 */ EABS_Set(1,1); /* 第一个参数为滑行充电功能使能,1为允许,0为禁止
最新毕业论文--网上书店系统的设计与实现
*********软件技术学院 毕业设计(论文) 题目:网上书店系统的设计与实现系别:软件技术 专业:ACCP 学号: 姓名: 指导老师: 完成日期:2009 年 3 月 5 日
目录 目录 (2) 前言 (4) 需求分析 (5) 一、用户需求分析 (6) 1.图书查询需求 (6) 2.购物车管理需求 (6) 3.订单处理需求 (6) 4.管理员与客户的分类功能 (6) 系统开发技术 (7) 一、MVC模式简介 (8) 1.电子商务概况摘要 (9) 系统总体设计 (10) 1.UML活动关系图 (11) 2.系统组成 (12) 3.功能设计 (12) (1)图书信息管理 (12) (2)购物车管理 (12) (3)会员注册 (12) (4)订单处理 (13) 数据库设计与实现 (13) 一、数据库的需求分析 (14) 1.数据库的逻辑设计 (14) 2.数据表基本结构 (16) 3.创建数据表脚本 (17) 系统实现过程 (18) 开发平台 (19) 一、系统各组件实现 (19) 用户表示层 (19) 系统测试与运行 (27)
一、系统测试 (27) 二、测试结果 (27) 结论 (30) 参考文献 (31) 谢辞 (32) 毕业设计(论文)成绩评定表(理科)....... 错误!未定义书签。
前言 随着Internet信息技术的高速发展和个人、企业上网的迅速普及,企业的WWW网站在商业活动中发挥着越来越大的作用,在信息时代,建立一个功能强大、界面美观的电子商务网站,建立电子商务系统平台,对企业的发展是至关重要的。 所谓电子商务,是指各种具有商业活动能力的实体(生产企业、商贸企业、金融机构、政府机构、个人消费者等)利用网络和先进的数字化传媒技术进行的各项商业贸易活动。其中特别要强调的特点,一是其商业背景,二是网络化和数字化。简言之,电子商务就是通过电子网络渠道达成的商务活动。 电子商务是计算机网络的第二次革命,它通过电子手段建立新的经济秩序,不仅涉及电子技术和商业交易本身,而且涉及诸如金融、税务、教育等社会其他层面。对于电子商务的研究始于20世纪70年代末,而其实施要更晚些,实施又分为两步,其中电子数据交换(Electronic Data Interchange,EDI)始于20世纪80年代中期,Internet上的电子商务始于20世纪90年代初期。电子商务活动相应分成两大类:企业组织-企业组织(Business-Business,B2B)型和企业组织-消费者(Business-Consumer,B2C)型。根据统计,目前电子商务活动中80%的收属于B2B型商务活动,这由于企业组织的信息化程度和技术水平比个体消费者明显要高,主要面向的是企业与企业,为企业提供进行采购、销售和结算等业务的平台。B2C则是我们最熟悉的,它直接面向终端的大众消费者。它通常也有两种形式,一种是类似一个大的超市,里面摆放着大量的商品,提供给消费者直接去选择购买;而另一种形式则类似一个大商城,商城中有许多柜台,用户可以直接到柜台选择和购买自己中意的东西,然后去结算,这种商城只提供柜台和相关的服务,并收取相应的柜台使用费。 一般意义上,一个完整的电子商务系统包括信息流、资金流与物流三个要素,三者相辅相成。信息流就是通过电子网络向客户揭示所售商品的相关信息,引导客户通过网络进行购物。资金流就是使客户在选择商品后,能够通过网络支付相关费用,一般包括预付款支付、网上银行支付、货到付款等多种形式。目前有些电子商务网站也可以接受邮局汇款。物流就是把客户
音量控制M62446的驱动C程序
音量控制M62446的驱动C程序 音量控制M62446 m62446 pdf //------------------------------------------------------------------------- // M62446 drving routines, VER 1.0 // // COPYRIGHT (C) 2000, Enbia Technology Inc. // Target: 8031 // AUTHOR: STEVEN LUO // // Revision History: // 2001/1/5 - Original Version // //------------------------------------------------------------------------- #include
傅里叶变换matlab代码
%傅里叶变换 clc;clear all;close all; tic Fs=128;%采样频率,频谱图的最大频率 T=1/Fs;%采样时间,原始信号的时间间隔 L=256;%原始信号的长度,即原始离散信号的点数 t=(0:L-1)*T;%原始信号的时间取值范围 x=7*cos(2*pi*15*t-pi)+3*cos(2*pi*40*t-90*pi/180)+3*cos(2*pi*30*t-90*pi/ 180); z=7*cos(2*pi*15*t-pi)+3*cos(2*pi*40*t-90*pi/180); z1=6*cos(2*pi*30*t-90*pi/180); z1(1:L/2)=0; z=z+z1; y=x;%+randn(size(t)); figure; plot(t,y) title('含噪信号') xlabel('时间(s)') hold on plot(t,z,'r--') N=2^nextpow2(L);%N为使2^N>=L的最小幂 Y=fft(y,N)/N*2; Z=fft(z,N)/N*2;%快速傅里叶变换之后每个点的幅值是直流信号以外的原始信号幅值的N/2倍(是直流信号的N倍) f=Fs/N*(0:N-1);%频谱图的频率取值范围 A=abs(Y);%幅值 A1=abs(Z); B=A; %让很小的数置零. B1=A1; A(A<10^-10)=0; % A1(A1<10^-10)=0; P=angle(Y).*A./B; P1=angle(Z).*A1./B1; P=unwrap(P,pi);%初相位值,以除去了振幅为零时的相位值 P1=unwrap(P1,pi); figure subplot(211) plot(f(1:N/2),A(1:N/2))%函数ffs返回值的数据结构具有对称性,因此只取前一半 hold on plot(f(1:N/2),A1(1:N/2),'r--') title('幅值频谱')
PID控制算法的C语言实现完整版精编版
P I D控制算法的C语言 实现完整版 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
P I D控制算法的C语言实现一P I D算法原理最近两天在考虑一般控制算法的C语言实现问题,发现网络上尚没有一套完整的比较体系的讲解。于是总结了几天,整理一套思路分享给大家。 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!简单的不是原始的,简单的也不是落后的,简单到了美的程度。先看看PID算法的一般形式: PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t 时刻): 1.输入量为rin(t); 2.输出量为rout(t); 3.偏差量为err(t)=rin(t)-rout(t); pid的控制规律为
理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境具体一下: 1.规定这个流程是用来为直流电机调速的; 2.输入量rin(t)为电机转速预定值; 3.输出量rout(t)为电机转速实际值; 4.执行器为直流电机; 5.传感器为光电码盘,假设码盘为10线; 6.直流电机采用PWM调速转速用单位转/min表示; 不难看出以下结论: 1.输入量rin(t)为电机转速预定值(转/min); 2. 输出量rout(t)为电机转速实际值(转/min); 3.偏差量为预定值和实际值之差(转/min); 那么以下几个问题需要弄清楚: 1.通过PID环节之后的U(t)是什么值呢 2.控制执行器(直流电机)转动转速应该为电压值(也就是PWM占空比)。
C语言实现FFT(快速傅里叶变换)
#include
【免费下载】matlab实现傅里叶变换
一、傅立叶变化的原理; (1)原理 正交级数的展开是其理论基础!将一个在时域收敛的函数展开成一系列不同频率谐波的叠加,从而达到解决周期函数问题的目的。在此基础上进行推广,从而可以对一个非周期函数进行时频变换。 从分析的角度看,他是用简单的函数去逼近(或代替)复杂函数,从几何的角度看,它是以一族正交函数为基向量,将函数空间进行正交分解,相应的系数即为坐标。从变幻的角度的看,他建立了周期函数与序列之间的对应关系;而从物理意义上看,他将信号分解为一些列的简谐波的复合,从而建立了频谱理论。 当然Fourier积分建立在傅氏积分基础上,一个函数除了要满足狄氏条件外, 一般来说还要在积分域上绝对可积,才有古典意义下的傅氏变换。引入衰减因子e^(-st),从而有了Laplace变换。(好像走远了)。 (2)计算方法 连续傅里叶变换将平方可积的函数f(t)表示成复指数函数的积分或级数形式。 这是将频率域的函数F(ω)表示为时间域的函数f(t)的积分形式。 为 连续傅里叶变换的逆变换 (inverse Fourier transform) 即将时间域的函数f(t)表示为频率域的函数F(ω)的积分。 一般可称函数f(t)为原函数,而称函数F(ω)为傅里叶变换的像函数,原函数和像函数构成一个傅里叶变换对(transform pair)。 二、傅立叶变换的应用; DFT在诸多多领域中有着重要应用,下面仅是颉取的几个例子。需要指出 的是,所有DFT的实际应用都依赖于计算离散傅里叶变换及其逆变换的快速算
法,即快速傅里叶变换(快速傅里叶变换(即FFT )是计算离散傅里叶变换及其逆变换的快速算法。)。(1)、频谱分析DFT 是连续傅里叶变换的近似。因此可以对连续信号x(t)均匀采样并截断以得到有限长的离散序列,对这一序列作离散傅里叶变换,可以分析连续信号x(t)频谱的性质。前面还提到DFT 应用于频谱分析需要注意的两个问题:即采样可能导致信号混叠和截断信号引起的频谱泄漏。可以通过选择适当的采样频率(见奈奎斯特频率)消减混叠。选择适当的序列长度并加窗可以抑制频谱泄漏。(2)、数据压缩由于人类感官的分辨能力存在极限,因此很多有损压缩算法利用这一点将语音、音频、图像、视频等信号的高频部分除去。高频信号对应于信号的细节,滤除高频信号可以在人类感官可以接受的范围内获得很高的压缩比。这一去除高频分量的处理就是通过离散傅里叶变换完成的。将时域或空域的信号转换到频域,仅储存或传输较低频率上的系数,在解压缩端采用逆变换即可重建信号。(3)、OFDM OFDM (正交频分复用)在宽带无线通信中有重要的应用。这种技术将带宽为N 个等间隔的子载波,可以证明这些子载波相互正交。尤其重要的是,OFDM 调制可以由IDFT 实现,而解调可以由DFT 实现。OFDM 还利用DFT 的移位性质,在每个帧头部加上循环前缀(Cyclic Prefix ),使得只要信道延时小于循环前缀的长度,就能消除信道延时对传输的影响。三、傅里叶变换的本质; 傅里叶变换的公式为dt e t f F t j ?+∞∞--=ωω)()(可以把傅里叶变换也成另外一种形式: t j e t f F ωπ ω),(21)(=可以看出,傅里叶变换的本质是内积,三角函数是完备的正交函数集,不同频率的三 角函数的之间的内积为0,只有频率相等的三角函数做内积时,才不为0。)(2,21)(2121Ω-Ω==?Ω-ΩΩΩπδdt e e e t j t j t j