低高度无线电高度表系统
低高度无线电高度表系统
第一节概述
一、功用
低高度无线电高度表系统用来测量飞机距离地面的垂直高度。
二、系统概述
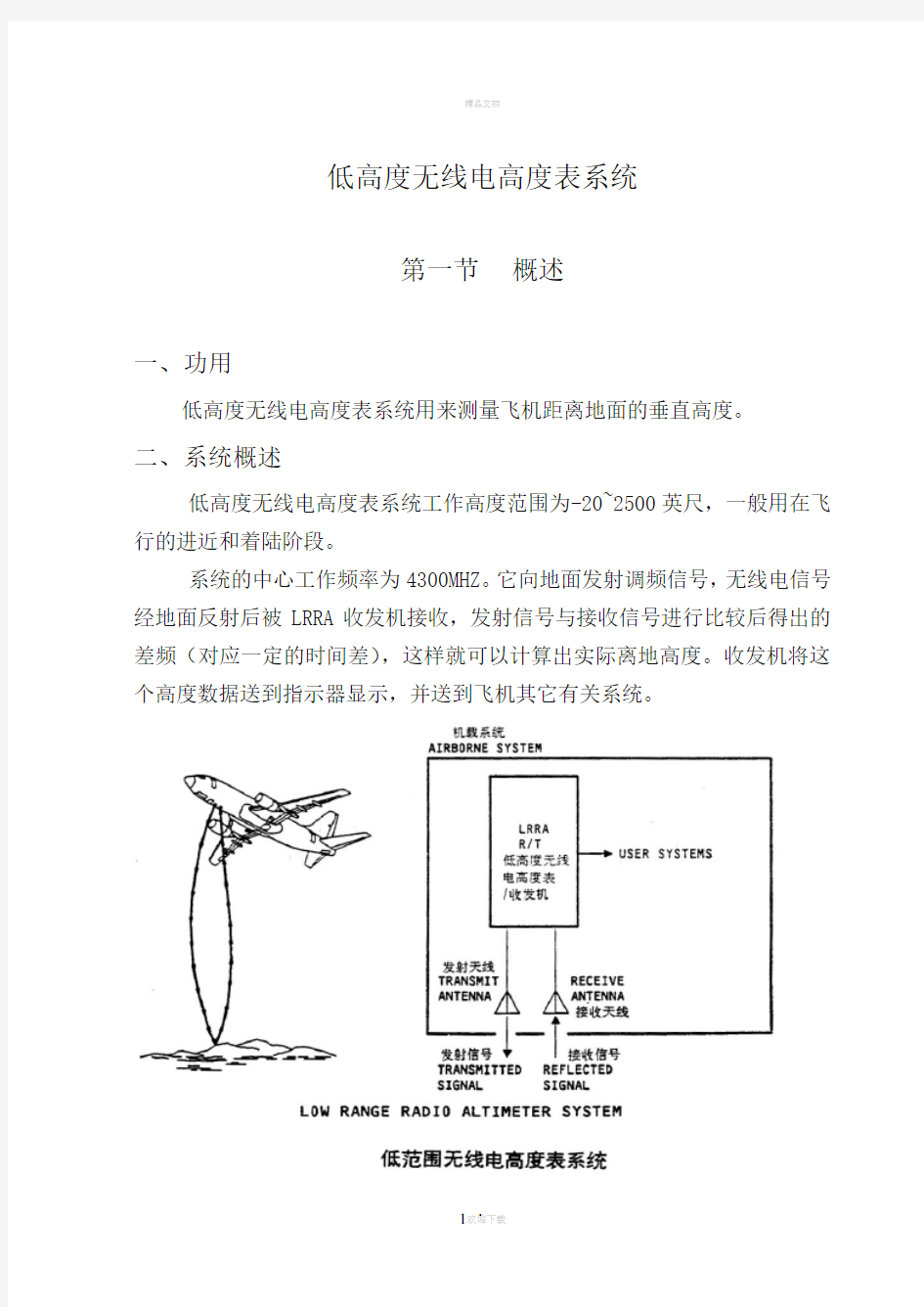
低高度无线电高度表系统工作高度范围为-20~2500英尺,一般用在飞行的进近和着陆阶段。
系统的中心工作频率为4300MHZ。它向地面发射调频信号,无线电信号经地面反射后被LRRA收发机接收,发射信号与接收信号进行比较后得出的差频(对应一定的时间差),这样就可以计算出实际离地高度。收发机将这个高度数据送到指示器显示,并送到飞机其它有关系统。
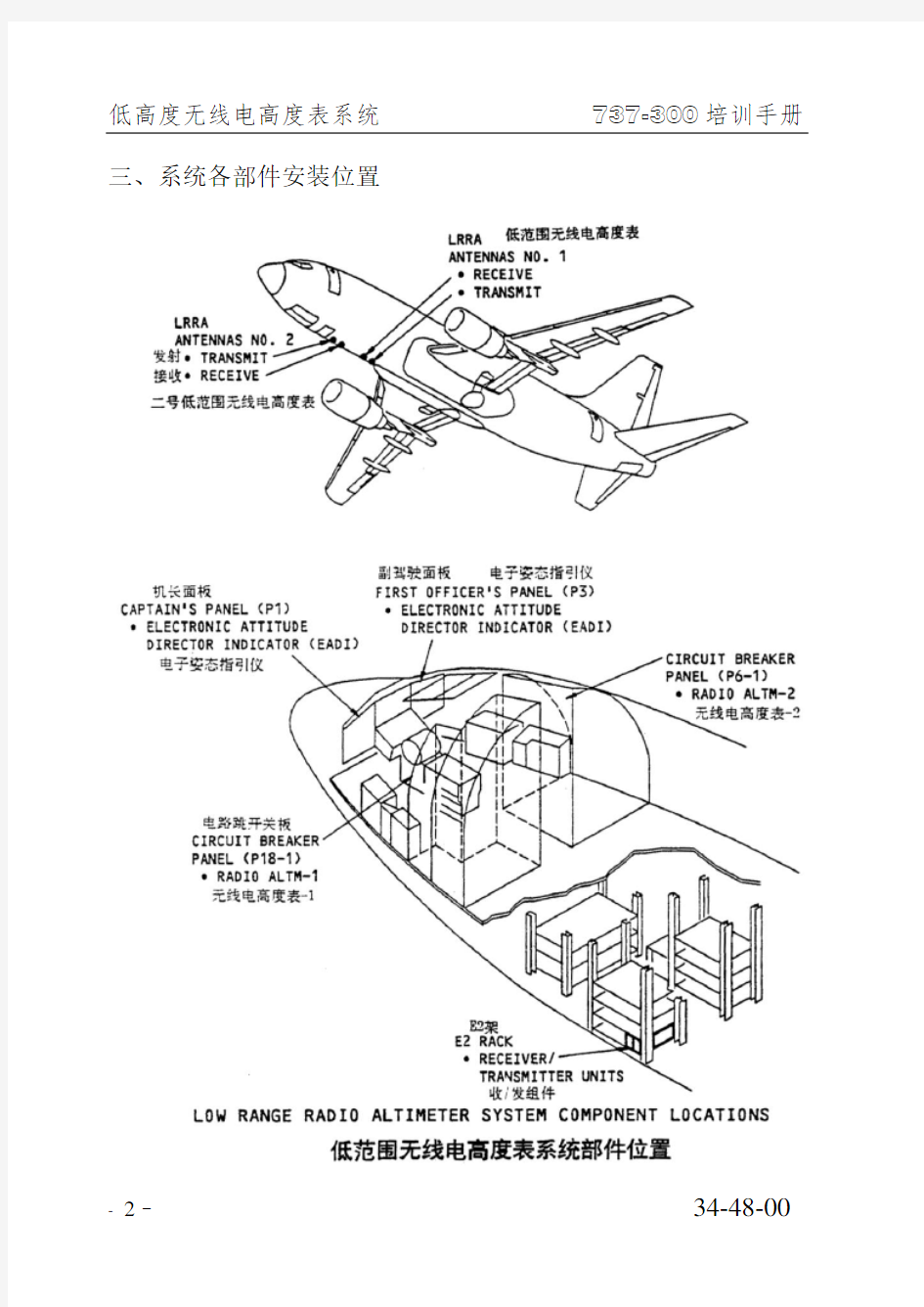
三、系统各部件安装位置
1、跳开关:LRRA—1跳开关—P18板
LRRA—2跳开关—P6板
2、收发机—E2—4架
3、天线—飞机底部
4、EADI显示器—P1、P3板(33A和34N飞机)
5、高度指示器—P1、P3板(3T0飞机)
第二节部件功能
一、LRRA系统收发机
1、功用
LRRA的 R/T组件发射和接收调频信号,对发射信号和回波信号进行比较和处理,得到飞机距离地面的高度。
2、结构特征
LRRA收发机是标准的1/2ATR短箱,重15磅。收发机靠前面两个锁扣固定在设备架上,前面板还有一个把手以便于搬动。面板上的插座用于连结到测试设备进行航线测试。前面板上还有一个自测试开关和故障指示灯。
3、电源
LAAR收发机使用115VAC,400HZ单相电源。
4、工作
发射机产生一个中心频率为4300MHZ的连续调频波信号输出。向地面发射的信号经过地面反射,回波信号被接收机处理。接收机通过比较发射与接收的信号频率,产生对应于绝对高度的信号,高度信号的处理是由收发机内部的两个微处理器来完成的,一个处理器进行高度信号处理并输出模拟和数字式高度数据;另一处理器完成监控功能,收发机还将无线电高度数据送到自动飞机控制系统。
5、自测试
按压收发机面板上的自测试开关进行自测试。如果自测试通过,则先显示40英尺,接着显示RA故障旗。
二、LRRA系统天线
1、功用
LRRA天线用来发射或接收无线电射频(RF)信号
2、结构特征
LRRA天线通过一根同轴电缆连结到收发机。由于工作在微波频段,所以电缆长度的要求很严格。天线通过一个定位销进行定位,并使用8个螺钉进行固定。发射天线与接收天线是相同的,可以互换。
LRRA天线工作在4300MHZ频率上。
三、EFIS控制面板
对于33A和34N飞机,低高度无线电高度表显示在EADI上,控制面板用来选择要求显示的信息。EFIS控制面板分成左右两部分,左边控制EADI 的显示,右边控制EHSI的显示。
(一)、EADI控制
1、功用
在进近和着陆阶段,EADI显示器可以显示无线电高度和所选择的决断高度。下面我们讨论左边的控制面板对EADI显示进行控制。
2、结构特征
(1)决断高度选择旋钮
决断高度是由决断高度选择旋钮来选择的,选择的范围是-20~+999英尺。决断高度选择旋钮是一种有24档位可连续旋转的旋钮,通常每转一格改变DH值1FT,但如果旋转速度超过2转/每秒,那么每转一格改变4FT。
(2)DH REF LCD液晶显示器
液晶显示器显示所选择的决断高度。当电源刚接通时,显示器显示200英尺。进行主暗/灯光测试时,显示器交替显示“888”两秒和显示空白一秒。(3)复位电门REST
当飞机下降穿过决断高度,可以通过接压RST电门对DH电路进行复位。(4)BRT亮度调节
BRT旋钮用来调节EADI显示器的亮度
(二)、EADI显示器
1、功用
在进近和着陆阶段,EADI显示器可以显示无线电高度和所选择的决断高度。
2、特性
(1)无线电高度显示
无线电高度是以数字形式显示在EADI,显示范围-20~+2500FT,从
-20~100FT是以2FT的增量更新显示,从100~500FT是以10FT增量更新显示;从500~2500FT是以20FT为增量递增显示。大于2500FT高度显示空白。
(2)上升的跑道符号
当LOC有效时,绿色跑道符号将升起在EADI上,飞机高度从2500到200FT,跑道符号显示一直保持在200FT;当飞机高度低于200FT,跑道符号随着高度的降低将逐渐升起直到碰到飞机符号(三角形)。
(3)决断高度(DH)显示
控制面板上液晶显示的决断高度显示在EADI上无线电高度的上面。如果控制面板所选择的决断高度为负值,那么EADI上决断高度显示空白。当飞机从比决断高度高75FT的高度下降,经过DH 时,DH值显示消失,只剩下两个黄色DH字母显示,并闪亮三秒钟,同时无线电高度值也显示黄色。这种DH警戒可以通过按压EFIS控制面板上RST复位按钮进行人工复位,或者飞机爬升到比DH值大75FT时自动复位。或者飞机落地后自动复位。DH 警戒复位后,将回到原来的颜色显示,无线电高度显示白色,DH显示绿色。(4)高度警戒(H—ALERT)
当飞机下降到高度1000英尺时,高度警戒信息白色的字符“ALT”将显示在EADI上。当飞机继续下降到500FT或爬升到2500FT时,高度警戒(ALT)将自动复位,或者可以通过按压EFIS控制面板上的REF复位按钮进行人工复位。
3、工作
(1)无决断高度警戒(DH ALERT)—RA大于DH
当无线电高度(RA)大于所选择的决断高度时,没有决断高度警戒显示。所选择的决断高度(DH)显示在无线电高度(RA)的上面。
(2)决断高度警戒(DH ALERT)—RA小于或等于DH。
当飞机从比DH高75FT处下降到DH值时,无线电高度和DH显示都变为黄色,并在最初的三秒“DH”闪亮。
(3)决断高度警戒终止
决断高度警戒的终点可以自动或人工进行复位。自动复位出现在飞机落地或飞机爬升到比DH高75FT,人工复位通过按压EFIS控制板上RES复位按钮。复位后,显示将回到原来的显示颜色,无线电高度RA显示白色,决
断高度DH显示绿色。
(4)无效数据
当无线电高度或决断高度数据无效时,EADI上将显示各自的黄色警告旗RA或DH。无线电高度数据无效还使跑道符号显示空白。
四、无线电高度表指示器
我部的3T0飞机所装的低高度无线电高度表,显示在专用的高度表指示器中。
1、电源
电源为115伏400赫兹交流电和28伏直流,指示器照明用5伏400赫兹交流。
2、特点
指示器从-20~500英尺为线性刻度,从500~2500英尺为对数刻度。出现警告旗表示所指高度无效。
3、工作
指示器指针根据无线电高度表收发机的输出信号大小指到一合适位置上。所测高度大于2500英尺时,指针就进入遮板后面。转动绝断高度旋钮可调整决断高度,当所测高度低于所选定的决断高度时,决断高度灯亮。
指示器内部的监视器确定收发机和指示器线路工作是否正常,任一装置发生故障,警告旗都出现。
4、测试
按压并保持指示器上的自测试按钮,指示器指示+30英尺,两秒钟后,故障旗出现,松开测试按钮,指示器继续指示到+300英尺然后回零。同时,指示器上的决断高度(DH)灯、ADI上的DH灯和近地警告(GPWS)上的不工作灯同时闪亮。
第三节工作原理
一、LRRA系统原理
1、时间频率关系
系统向地面发射一个线性连续调频波信号,信号经地面反射延时后被接收机接收。接收信号与发射信号进行混濒,得到的差频信号的频率与飞机绝对高度成正比,代表飞机离地的真实高度。
2、工作
如图所示,发射机发射的调频信号频率为(4300±A)MHZ,在某个时刻T1发射信号的频率为F1(实线),F1信号经地面返回延时△T后,在T2时刻被接收(虚线)。而发射调频信号经过△T延时后,从F1上升到F2,在T2时刻,发射信号(频率F2)接收信号(频率F1)在混频器混频,得到的差频信号的频率△F=F2-F1。这个△F是与延时时间△T成比例的,△T又对
民航常用无线电导航设备
民航常用无线电导航设备 简介
第一节仪表着陆系统(Instrument Landing System — ILS) 仪表着陆系统由地面设备和机载设备组成。地面设备可以分为三个部分:航向信标台、下滑信标台、指点信标台或测距仪台。当测距仪成为仪表着陆系统的一部分时,其通常安装在下滑信标台。机载设备则包括相应的天线、接收机、控制器及指示器等。 1.地面设备的组成 ①航向信标:航向信标的主要作用是给进近和着陆的飞机提供对准跑道中心延长线航向道(方位)信息。 工作在VHF频段,频率范围为108.1~111.975MHz,每个频道之间的间隔为0.05MHz;并优先使用以MHz为单位的小数点后一位为奇数的那些频率点,例如109.7、110.3等;小数点后一位为偶数的那些频率点则分配给了全向信标。因此,航向信标只有40个频道可使用。 ②下滑信标:下滑信标的主要作用是给进近和着陆的飞机提供与地面成一定角度的下滑道(仰角)信息。 工作在UHF频段,频率范围为328.6~335.4MHz,每个频道之间的间隔为0.15MHz,其工作频道与航向信标的工作频道配对使用,因此也只有40个频道可供使用。 ③指点信标:用于给进近和着陆的飞机提供距跑道入口固定点的距离信息。工作在VHF 频段,固定频率为75MHz。 ④测距仪:用测距仪代替指点信标时,能给进近和着陆的飞机提供至测距仪台或着陆点或跑道入口的连续距离。工作在L波段,频率范围为962~1215MHz。与ILS合用时,其工作频率与航向信标配对使用。 各台的典型位置如图1—1所示。 图1—1 ILS典型位置示意图 2.ILS的基本定义和性能类别 2.1.基本定义 调制度差(ddm):较大音频信号对射频的调制度百分数减去较小音频信号对射频的调制度百分数的值。 航道线:在任何水平面内最靠近跑道中心线的ddm为零的各点的轨迹。
调频无线电高度表体制分析
调频无线电高度表体制分析 1 概述 无线电高度表能在各种气候条件下精确测量飞行体离地或海面的实际高度,它广泛应用航空、航天等领域。如飞机的进场着陆时提供实时高度,军用飞机对地轰炸攻击、导弹超低空飞行、巡航弹的地形匹配等等都需无线电高度表提供飞行体离地精确高度,因此无线电高度表是飞机及各种飞行器必不可少的电子设备。 无线电高度表根据发射信号的调制不同,一般可分为脉冲体制、调相体制和调频连续波体制。调相体制由于线路复杂,国内外已很少应用,应用较多的是脉冲体制和调频连续波体制两种。这两种体制如果没计得好都能达到很好的测高精度和测高范围,但相比之下连续波调频体制较脉冲体制有线路简单,易实现、可靠性高,体积、重量小、抗干扰能力强等一系列优点,因此随着调频体制理论的不断完善,目前国内外应用的无线电高度表绝大部分采用连续波调频体制。 调频体制无线电高度表一般由接收发射机、发射天线、接收天线、发射电缆、接收电缆和高度指示器(高度显示器)组成。调频体制无线电高度表原理方框图如图1.所示: 调频无线电高度表发射机是一个调频振荡器,它受调制器调制,产生连续波调频信号。调制形式可以是三角波调制、锯齿波调制或正弦波调制。前两种是线性调频,后者是非线性调频。发射机输出调频信号如图2所示(为说明方便这儿把发射信号简化成单一频谱信号虑)。图中?F为调频信号的最大频率与最小频率之差,称为调频频偏;τ为电波从发射天线至地面再反射回到接收天线所产生的延迟时间,τ = 2H/C(C为无线电波在空中传播速度,H为飞行器高度);fb为差拍信号,它是某一时刻发射信号频率(直达信号频率)与回波信号频率之差;T m为调制周期。 度 发射电缆接收电缆
飞机低无线电高度表系统故障分析
飞机低无线电高度表系统故障分析 因为早期机载无线电高度存在着电路集成度不高、拆分不容易以及可测性能较差的弱点,造成其在测试的过程中无法保证测试的可靠性,并且后期的维护和维修时间更长、花费更多等等。对于以上存在的各项的特点,文中分析了飞机故障一般出现原因和具体表现现象,并且与实际情况相结合,提出了减少故障发生的操作手段。 标签:系统原理;故障分析;无线电高度表 引言 低高度无线电高度表系统性工作的高度范围在负20英尺至2500英尺之间,通常情况下使用在飞行的过程中以及着陆的过程中。操作系统中心的工作频率在4300兆赫兹左右,其向地面进行调频信号的发送,无线点信号经过地面的发射之后被飞机低无线电高度表收发机接收,信号发射以及信号的接受进行相互比较之后分析得出彼此间的差频,这样就能够计算出实际距离地面的高度。收发机把这个高度数据发送至指示器上显示,并且发送至飞机中的其他系统。 1 硬件系统 1.1 设计思路 开展系统硬件平台设计时,一方面能够考虑到无线电高度表上的各个指标对于测试的速度有较高的要求,需要使用VXI总线仪器将此类测试工作完成,另外一方面因为工作的频率在42千兆赫兹至44千兆赫兹之间,并且测试中有各种多种多样的内容,单纯性的使用VXI仪器无法满足各种测试性要求,因此硬件平台需要使用现如今使用最多的VXI以及GPIB仪器混合形式组成。整个设计系统需要符合的条件是ARING608A航空電子系统测试中的各项操作设备的一般标准[1]。此项标准对于接口进行了一般设计,其开展的是标准化定义操作,当中包含了机械连接、安装形式、接口模块的尺寸大小以及接卡的连接方式和信号的分类等等。 1.2 硬件组成 无线电高度表的智能测试操作系统使用的是VXI以及GPIB仪器混合形式组成,各种操作仪器使用的是商业货架产品,当中各种仪器以及开关的自检自校功能。硬件平台主要是通过工控机操作体系、VXI操作仪器以及接口连接器组件等等,能够对测试适配器做更换操作,详细的硬件结构图参见图1。 图1 高度表全自动测试操作体系硬件设计图 2 软件系统
低高度无线电高度表系统
低高度无线电高度表系统 第一节概述 一、功用 低高度无线电高度表系统用来测量飞机距离地面得垂直高度。 二、系统概述 低高度无线电高度表系统工作高度范围为-20~2500英尺,一般用在飞行得进近与着陆阶段。 系统得中心工作频率为4300MHZ。它向地面发射调频信号,无线电信号经地面反射后被LRRA收发机接收,发射信号与接收信号进行比较后得出得差频(对应一定得时间差),这样就可以计算出实际离地高度。收发机将这个高度数据送到指示器显示,并送到飞机其它有关系统。 三、系统各部件安装位置
1、跳开关:LRRA—1跳开关—P18板
LRRA—2跳开关—P6板 2、收发机—E2—4架 3、天线—飞机底部 4、EADI显示器—P1、P3板(33A与34N飞机) 5、高度指示器—P1、P3板(3T0飞机) 第二节部件功能 一、LRRA系统收发机 1、功用 LRRA得R/T组件发射与接收调频信号,对发射信号与回波信号进行比较与处理,得到飞机距离地面得高度。 2、结构特征 LRRA收发机就是标准得1/2ATR短箱,重15磅。收发机靠前面两个锁扣固定在设备架上,前面板还有一个把手以便于搬动。面板上得插座用于连结
到测试设备进行航线测试。前面板上还有一个自测试开关与故障指示灯。 3、电源 LAAR收发机使用115V AC,400HZ单相电源。 4、工作 发射机产生一个中心频率为4300MHZ得连续调频波信号输出。向地面发射得信号经过地面反射,回波信号被接收机处理。接收机通过比较发射与接收得信号频率,产生对应于绝对高度得信号,高度信号得处理就是由收发机内部得两个微处理器来完成得,一个处理器进行高度信号处理并输出模拟与数字式高度数据;另一处理器完成监控功能,收发机还将无线电高度数据送到自动飞机控制系统。 5、自测试 按压收发机面板上得自测试开关进行自测试。如果自测试通过,则先显示40英尺,接着显示RA故障旗。 二、LRRA系统天线 1、功用 LRRA天线用来发射或接收无线电射频(RF)信号 2、结构特征 LRRA天线通过一根同轴电缆连结到收发机。由于工作在微波频段,所以电缆长度得要求很严格。天线通过一个定位销进行定位,并使用8个螺钉进行固定。发射天线与接收天线就是相同得,可以互换。 LRRA天线工作在4300MHZ频率上。
航空无线电导航设备第一部分:仪表着陆系统(ILS)技术要求
航空无线电导航设备 第1部分:仪表着陆系统(ILS)技术要求 MH/T 4006.1-1998 1 范围 本标准规定了民用航空仪表着陆系统设备的通用技术要求,它是民用航空仪表着陆系统设备制定规划和更新、设计、制造、检验以及运行的依据。 本标准适用于民用航空行业各类仪表着陆系统设备。 2 引用标准 下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列要求最新版本的可能性。 GB 6364—86 航空无线电导航台站电磁环境要求 Mt{/T 4003—1996航空无线电导航台和空中交通管制雷达站设置场地规范 中国民用航空通信导航设备运行、维护规程(1985年版) 中国民用航空仪表着陆系统Ⅰ类运行规定(民航总局令第57号) 国际民用航空公约附件十航空电信(第一卷)(第4版1985年4月)国际民航组织8071文件无线电导航设备测试手册(第3册1972年)
3 定义、符号 本标准采用下列定义和符号。 3.1航道线course line 在任何水平面内,最靠近跑道中心线的调制度差(DDM)为。的各点的轨迹。 3.2航道扇区course sector 在包含航道线的水平面内,最靠近航道线的调制度差(DDM)为0.155的各点迹所限定的扇区。 3.3半航道扇区half course sector 在包含航道线的水平面内,最靠近航道线的调制度差(DDM)为0.0775的各点轨迹所限定的扇区。 3.4调制度差difference in depth of modulatlon(DDM) 较大信号的调制度百分比减去较小信号的调制度百分比,再除以100。 3.5位移灵敏度(航向信标)displacement sensitivity(10calizer) 测得的调制度差与偏离适当基准线的相应横向位移的比率。 3.6角位移灵敏度angular displacemeat seusitivity 测得的调制度差与偏离适当基准线的相应角位移的比率。 3.7仪表着陆系统下滑道ILS glide path 在包含跑道中心线的垂直平面内.最靠近水平面的所有调制度差(DDM)
《航空无线电导航技术》习题要点
《航空无线电导航技术》习题 1、超短波通信的特点是(C )。 A:不受地形地物的影响B:无衰落现象 C:通信距离限定在视距D:频段范围宽,干扰小2、长波、中波的传播是以(B)传播方式为主。 A:天波B:地波C:直射波D:地面反射波3、短波传播是以(A )传播方式为主。 A:天波B:地波C:直射波D:地面反射波4、超短波传播是以(C )传播方式为主。 A:天波B:地波C:直射波D:地面反射波5、高频通信采用的调制方式是(B)。 A:等幅制B:调幅制C:调频制D:调相制 6、关于短波通信使用频率,下述中正确的是(B )。 A:距离远的比近的高B:白天比晚上的高 C:冬季比夏季的高D:与时间、距离等无关7、天波传输的特点是( A )。 A:传播距离远B:信号传输稳定 C:干扰小D:传播距离为视距 8、地波传输的特点是( A )。 A:信号传输稳定B:传播距离为视距 C:受天气影响大D:传播距离远 9、直射波传播的特点是( C )。
A:传播距离远B:信号传输不稳定 C:传播距离为视距D:干扰大 10、单边带通信的缺点是(D )。 A:频带宽B:功率利用率低C:通信距离近 D:收发信机结构复杂,要求频率稳定度和准确度高 11、飞机与塔台之间的无线电联络使用(B )通信系统。 A:高频B:甚高频C:微波D:卫星 12、飞机与区调或站调之间的无线电联络使用(A)通信系统。 A:甚高频B:高频C:微波D:卫星 13、目前我国民航常用的空管雷达是(A )。 A:一、二次监视雷达B:脉冲多普勒雷达 C:着陆雷达D:气象雷达 14、相对于单独使用二次雷达,使用一次、二次雷达合装的优点是( C )。 A:发现目标的距离更 B:常规二次雷达条件下提高雷达系统的距离分辨力 C:能够发现无应答机的目标 D:克服顶空盲区的影响 15、二次监视雷达与一次监视雷达相比的主要优点是(A)。 A:能够准确提供飞机的高度信息 B:能够探测气象信息并能够给出气象轮廓 C:能够准确提供飞机的距离信息
航空无线电导航系统
第一章绪论 1.1.1导航与导航系统的基本概念 1.导航 导航的基本含义是引导运行体从一地到另一地安全航行的过程。导航强调的是“身在何处,去向哪里”是对继续运动的指示。导航之所以定义为一个过程,是因为它贯穿于运动体行动的始终,遍历各个阶段,直至确保运行达成目的。应当说大部分运行体都是由人来操纵的,而对那些无人驾驶的的运行体来说,控制是由仪器或设备来完成的,这时的导航就成为了制导。近年来人们将定位于导航并列提出。事实上定位提供的位置参量是一个标量,只有将其与方向数据联合起来成为矢量,才能服务于运行体的航行。因此定位与测角、测距一样是导航的技术之一,通过定位可以实现导航。也可以说定位是静态用户要求的;但对动态用户而言要求的是导航。 2.导航系统 导航系统是用于对运行体实施导航的专用设备组合或设备的统称。导航系统是侧重于实现特定导航功能的设备组合体,组合体内的各部分必须按约定的协调方式工作才能实现系统功能,而导航设备一般是指导航系统中某一相对独立部分或产品,或实现某一导航功能的单机。 1.1.3 导航及无线电导航系统的分类 导航是一门基于“声、光、电、磁、力”的综合性的应用科学,实现
导航的技术手段很多,按其工作原理或主要应用技术可分为下述类别: (1)天文导航——利用观测自然天体(空中的星体)相对于运行体所在坐标系中的某些参量实现的导航称为天文导航。 (2)惯性导航——利用牛顿力学中的惯性原理及相应技术实现的导航称为惯性导航。 (3)无线电导航——利用无线电技术实现的导航称为无线电导航。(4)地磁导航——利用地球磁场的特性和磁敏器件实现的导航称为地磁导航。 (5)红外线导航——利用红外线技术实现的导航称为红外线导航。(6)激光导航——利用激光技术实现的导航称为激光导航。 (7)声纳导航——利用声波或超声波在水中的传播特性和水声技术实现的导航(用于对水下运行体的导航)称为声纳导航。(8)地标或灯标导航——利用观测(借助光学仪器或目视)已知位置的地标或灯标实现的导航称为地标或灯标导航。 2.无线电导航系统的分类 无线电导航是导航中的一大分支,是当今应用最广、发展最快、在导航家族中站主导地位的一类导航技术。下面介绍几种常用的无线电导航系统分类: (1)按用户使用时相对依从关系分类 ○1自备式(或自主式)导航系统。这类导航系统仅依靠装在运行体上的导航设备就能独立自主地为该运行体提供导航服务。
无线电导航原理和机载设备简介
无线电导航原理和机载设备简介 早期的飞行器在空中飞行仅依靠地标导航--飞行中盯着公路、铁路、河流等线状地标;山峰、灯塔、公路交汇点等点状地标;湖泊、城镇等面状地标。 后来,空勤人员利用航空地图、磁罗盘、计算尺、时钟等工具和他们的天文、地理、数学知识,根据风速、风向计算航线角,结合地标修正航线偏差,这种工作叫做“空中领航”。这种方法虽然“原始”,但航空先驱林伯当年就是依靠这些东西驾驶一架活塞式单发动机飞机“圣路易斯精神号”独自由美国西海岸起程,直接飞越大西洋到达巴黎的,他飞越茫茫大西洋时还通过观察海上的洋流、夜空中的星座来辨别方向、确定位置。空中领航学是飞行员的一门必修课,其核心是用矢量合成原理修正风对飞行航迹的影响。 随着无线电技术的发展,各式各样的电子设备为飞行器提供精确的导航信息:有用于洲际导航的奥米加导航系统(OMEGA)、适用于广阔海面的罗兰系统(LORAN-A,LORAN-C)、用于近距导航的甚高频全向无线电信标导航系统(VORTAC),另外还有一些专为军事用途开发的导航信标和雷达系统。现在,利用同步卫星工作的全球定位系统(GPS)已开始广泛使用。但 VORTAC 仍是近距导航的主流,绝大多数现代军民用飞机,包括民航客机、小型通用飞机都配备有VOR接收机(VOR,very high frequency ommi-directional range)。 VORTAC是VOR/DME和TACAN的统称。VOR/DME是民用系统,TACAN是为适应舰载、移动台站而开发的军用战术空中导航系统(即塔康导航系统)。两者的工作原理和技术规范都不同,但使用上它们是完全一样的。事实上,有的VOR/DME 和TACAN发射台站是建在一起、使用同一个频率的,对空勤人员来说,只是一个VOR信标。VOR信标是世界上最多、最主要的无线电导航点。许许多多的VOR 台站相隔一定距离成网络状散点分布,当飞机上的接收机收到VOR信标的信号,飞行人员就可通过专用仪表判断飞机与该发射台站的相对位置,如果台站信号是带测距的(DME,distance measuring equitment),还可知道飞机与台站的距离,从而确定飞机当前的位置,并知道应以多少度的航线角飞抵目的地。 VOR/DME/NDB基本原理 VOR:very high frequency ommi-directional range,甚高频全向无线电信标 VOR信号发射机和接收机的工作频率在108.0-117.95 MHz之间。VOR台站发射机发送的信号有两个:一个是相位固定的基准信号;另一个信号的相位是变化的,同时象灯塔的旋转探照灯一样向360度的每一个角度发射,而向各个角度发射的信号的相位都是不同的,它们与基准信号的相位差自然就互不相同。向360度发射的信号(指向磁北极)与基准信号是同相的,而向 180度发射的信号(指向磁南极)与基准信号相位差180度。飞机上的VOR接收机根据所收到的两个信号的相位差就可判断飞机处于台站向哪一个角度发射的信号上。也就是说,可以判断飞机在以台站发射机为圆心的哪一条“半径”上。 VOR台站发送的信号形成360条“半径”,辐射状向各个方向传送,每条“半径”就是一条航道,称为“Radial”。假如:飞机位于平州VOR台站(该台
“2500英尺以下失去两部无线电高度表
飞行操作电传(FOT) 主题:关于2500英尺以下失去两部无线电高度表的通告 适用机型:A320、A330、A340型飞机 编写依据:空客FOT STL 999.0057/11 生效日期:2011年7月28日 空客公司近期发布了关于“2500英尺以下失去两部无线电高度表”的FOT (飞行运行电报),为降低运行风险、保证飞行安全,特编译此飞行运行电报,具体如下: 1.目的 发布本FOT的目的是告知运营人,双无线电高度表(RA)转换至无计算数据(NCD)方式所导致的操作影响,并提醒运营人应在《飞机技术记录本》中报告任何有关这一FOT中所涉及的情况。 2.描述 作为提示,空客飞机装备了两部无线电高度表(RA)。这两部RA向飞机不同系统提供飞机高于地面的高度;在巡航阶段(高于9000英尺AGL),由于超出了工作范围,RA无法计算无线电高度并转为NCD方式。在这种情况下,PFD上没有无线电高度显示。当无线电高度在默认范围内时,方在2500英尺AGL以下显示无线电高度。 某些运营人报告了几起不正常事件,即在2500英尺以下没有无线电高度指示(即RA在NCD方式),并且无任何相关ECAM警告(无“NAV RA 1+2 FAULT”)、PFD上无任何RA红色警告旗。
技术调查显示,产生这一错误指示的原因与产生错误的无线电高度表指示的原因相类似(参考OIT/FOT SE 999.034/09)。 然而,RA这一错误指示对驾驶舱的影响和对飞行所产生的后果不需要特别的操作建议。现行有效的FCOM和FCTM提供的操作建议仍然适用。2.1 一部RA在NCD方式 如果一部RA在进近时失效,对驾驶舱唯一的影响是着陆能力转换为“CAT 2 ONLY”。另一部RA将同时显示在两部PFD上,并用于自动喊话。着陆后,可能触发“NAV RA 1(2) FAULT”ECAM警告。 2.2 两部RA在NCD方式 如果两部RA在进近时失效,使用RA数据的系统将认为无线电高度在2500英尺AGL以上。 驾驶舱受影响的系统主要有: —每部PFD上无RA数据(无红色警告旗显示),且无“NAV RA 1+2 FAULT”ECAM警告触发 —无自动喊话(除非在MCDU 的BARO MDA/MDH栏内输入相关的最低标准) —无“RETARD”自动喊话提示 —可能有不适当的GPWS警告 —TCAS不工作 —失去“SPEED SPEED SPEED”低能量警告 —失去预测型和反应型风切变警告 —在拉平阶段,A floor功能将不被抑制(低于100英尺) —在正常法则中,飞行操作可能不会转换为拉平子模式。因此,正常法则仍保持载荷因子需求的子模式,并带有自动配平和整个飞行包线的保护—对于A320系列的飞机,反推可能不工作
A320系统知识普及帖之25-无线电高度表系统常见问题
无线电高度表(Radio Altimeter)是一种使用无线电信号测量航空器离地高度的机载设备。民用航空器上使用的无线电高度表一般为低高度无线电高度表(LRRA:Low Range Radio Altimeter),测量范围0到2,500英尺,通常在航空器进近和着陆阶段使用,特别是在低能见度和自动着陆的情况下。无线电高度表是近地警告系统(GPWS)的基本组成部分。 工作原理简介:无线电高度表系统向地面发射调频连续波信号,这些信号经地面反射后被接收机接受,通过比较发射信号和接收信号的时间差就可以计算出航空器实际的离地高度。A320飞机的RA 有两部,系统组成如下图.两部收发机位于后货舱,自带风扇冷却. 四个小方型天线,两个发射,两个接收.高度显示在两侧的PFD上.
在系统使用中经常出现如下错误,给飞行员造成很大困惑,甚至造成飞机损坏. 无线电高度表(Radio Altimeter)有两种工作模式,NO正常模式和NCD模式 NCD(无计算数据模式)是在某一高度以上(5000英尺)或飞机在某些飞行姿态如(ROLL >30) 这时候系统会进入NCD模式. 如果在正常模式时给系统送了错误的数据,如过低的高度,或在飞机低高度时收到了NCD信号. (如在飞机进近中收到NCD会导致飞机不会激活FLARE模式,从而导致擦尾或重着陆) 下表中列出了一些典型的故障. 在故障调查中,发现问题主要存在于以下几个方面. 1.天线区域被污染,常见的是尘土,雨雪天的污泥,渗漏出的各种油液. 参考A320 MPD 324200-03-1 要求每6个月做一次清洁工作.在雨雪天气或在跑道受污染的情况下及时清洁天线表面.可以有效避免出现错误数据和NCD情况,防止飞机擦尾或重着陆
直升机机载无线电高度表的现状与发展
第十六届(2000)全国直升机年会论文 直升机机载无线电高度表的现状与发展 孙国忠景山 (陆军航空兵学院) 摘要:机载无线电高度表是直升机上必不可少的导航设备之一,它能在各种气象 条件下精确测量飞机距地面或海面的真实高度。它除能给飞行员提供高度信息,保 证飞机低空安全飞行外,还能连续向自动驾驶仪或多卜勒雷达等设备与系统,提供 模拟高度信息与数字高度信息。本文对直升机机载无线电高度表的技术现状进行了 简要分析,并对其新技术和发展方向作了可行性预测。 1 总述 无线电高度表(Radio Altimeter)在其研制的初期工作频率低,在使用过程中存在方法误差,测高灵敏度低等缺点,为此提高了工作频率,使其工作在微波波段,所以无线电高度表有时也称之为雷达高度表(Radar Altimeter),一般情况下称无线电高度表(以下简称高度表)。目前,国内外生产高度表的厂家很多,国内的厂家有232厂、782厂等等,国外较有名的公司有美国的Collins公司、Bendx公司,法国的Thomson公司等等。由于高度表技术发展较快,应用范围不断扩大,因而各种飞行系统也对它提出了不同程度的要求,为满足这些要求,国外厂家不惜花巨资从事高度表工作体制的研究,在系统和电路设计方面,也不断采用新技术,新工艺,使高度表的测高性能进一步提高,功能越来越齐全,体积、重量进一步减小,可靠性、维修性指标进一步提高,从而为现代直升机执行各种特殊任务提供了安全飞行保障。 2 现状 目前直升机上安装的高度表大体可分为脉冲式高度表、调频式高度表、以及调频连续波(FM/CW)式高度表;其中调频连续波式高度表,又分为恒差拍调频连续波式与恒定调制频率连续波式高度表。随着直升机用途的不断扩展,对高度表的工作体制提出了更高的要求,所以脉冲式高度表与调频连续波式高度表又派生出多种体制的高度表。 调频式高度表,其工作原理是依据直接波信号与反射波信号存在频率之差即差拍频率,其值由下式决定:F b=(4ΔF? Fm1/C)?H,其中F b为差拍信号的频率,ΔF为频移,F m1为调制信号的频率,C为无线电波的传播速度(约为3×108 m/s),H为飞机的飞行高度。由上式可知,当频移与调制频率不变时,差拍频率与飞行高度成正比。而差拍信号是一个周期为Tm的复杂振荡信号,高度H不同时,一个调制周期内差拍周期数也不同,高度越高,差拍周期数也越大,通过测量调制周期内差拍信号周期数的方法来测量高度。由于差拍频率随高度变化的特殊性,所以此型高度表存在方法误差以及测高精度低等缺点,而且体积大,重量重,结构复杂,目前已被淘汰。目前陆航只有米-8直升机上装备
无线电导航系统讲义
航空无线电导航系统 第一章 绪论 1.1.1 导航与导航系统的基本概念 1.导航导航的基本含义是引导运行体从一地到另一地安全航行的过程。导航强调的是“身在何处,去向哪里”是对继续运动的指示。导航之所以定义为一个过程,是因为它贯穿于运动体行动的始终,遍历各个阶段,直至确保运行达成目的。应当说大部分运行体都是由人来操纵的,而对那些无人驾驶的的运行体来说,控制是由仪器或设备来完成的,这时的导航就成为了制导。近年来人们将定位于导航并列提出。事实上定位提供的位置参量是一个标量,只有将其与方向数据联合起来成为矢量,才能服务于运行体的航行。因此定位与测角、测距一样是导航的技术之一,通过定位可以实现导航。也可以说定位是静态用户要求的;但对动态用户而言要求的是导航。 2.导航系统导航系统是用于对运行体实施导航 GAGGAGAGGAFFFFAFAF
的专用设备组合或设备的统称。导航系统是侧重于实现特定导航功能的设备组合体,组合体内的各部分必须按约定的协调方式工作才能实现系统功能,而导航设备一般是指导航系统中某一相对独立部分或产品,或实现某一导航功能的单机。 1.1.3 导航及无线电导航系统的分类导航是一门基于“声、光、电、磁、力”的综合性的应用科学,实现 导航的技术手段很多,按其工作原理或主要应用技术可分为下述类别:(1)天文导航——利用观测自然天体(空中的星体)相对于运行体所在坐标系中的某些参量实现的导航称为天文导航。(2)惯性导航——利用牛顿力学中的惯性原理及相应技术实现的导航称为惯性导航。(3)无线电导航——利用无线电技术实现的导航称为无线电导航。(4)地磁导航——利用地球磁场的特性和磁敏器件实现的导航称为地磁导航。(5)红外线导航——利用红外线技术实现的导航称为红外线导航。(6)激光导航——利用激光技术实现的导航称为激光导航。(7)声纳导航——利用声波或超声波在水中的传播特性和水声技术实现的导 GAGGAGAGGAFFFFAFAF
飞机低无线电高度表系统故障分析
龙源期刊网 https://www.360docs.net/doc/b316997496.html, 飞机低无线电高度表系统故障分析 作者:张海荣 来源:《智富时代》2019年第06期 【摘要】为了确保飞机运行的安全性,相关部门应该注重低无线电高度表的应用,加强对飞行运行的控制,而原有的电度表电路集成度较差、不易拆开、测试通过率低,相关技术人员需要予以优化。因此,在现代化社会的发展中,相关部门需要引进先进的高度表系统,确保测试的可靠性和安全性,减少各项资源的浪费问题[1]。基于此,文章介绍了无线电高度表系 统的工作原理及其重要性,分析了飞机低无线电高度表系统故障,总结了相应的优化措施。 【关键词】飞机;低无线电高度表;系统故障 一、引言 在现代化社会的发展中,人民群众的生活质量得到了很大提升,大家对航空行业的发展提出了更加严格的要求。现阶段,我国机队规模日益扩大,飞机老化问题日益严重,这就引发了一系列飞机低无线电高度表系统故障,严重威胁着飞机飞行的安全性,延误了航班的飞行时间。为了改善飞机低无线电高度表系统故障,确保飞行的安全性,相关部门应该针对这些故障制定相应的维修方案,为人民群众提供良好的出行方式。 二、无线电高度表系统的工作原理 无线电高度表是应用无线电限号测定飞机距离地面高度的机载设备,其主要是测量飞机到地面的高度,在飞机下方地形不平坦的情况下,无线电高度表也可以测量高度,高度属于适用于飞机在爬升、进近、着陆阶段。同时,无线电高度表系统能够向地面发射调频连续波信号,在信号由地面反射后会被接收机接收,在对比发射信号、接收信号时间差的基础上,计算飞机的真实离地高度,如图1所示。 图1 飞机的真实离地高度 例如,A320机队的无线电高度表系统部件主要组成是两部收发机、两部风扇、两部发射天线、两部接收天线,在系统和DMC进行连接的情况下,能够在PFD中进行显示:在飞机高度低于2500英尺的情况下,高度会在PFD中显示;在高度低于500英尺的情况下,高度带会出现红色高度条;在高度低于300英尺的情况下,一个地平线上升跑道指示带会在俯仰指示的下方进行显示。除此之外,RA收发机的工作频率范围在4200至4400MHz,其主要作用是测量飞机到地面的实际高度,而RA天线的工作范围是由飞机的姿态决定的,俯仰、横滚都在30°范围内。在飞机正常运行的过程中,RA1能够通过DMC为机长PFD提供数据,而RA2可以通过DMC为副驾侧提供数据,而无线电高度信息能够由ARINC429总线传送到各个用户系
无线电高度表服务通告
523-0807558-101000 372669 NAVIGATION LRA-900RADIO ALTIMETER(CPN822-0334-002/003/020/220/221) RF ASSEMBLY A4(CPN827-2774-001/002/003) SERVICE BULLETIN6 REVISION NO.1 REDUCE OCCURRENCES OF INTERMITTENT RADIO ALTIMETER FLAG TRANSMITTAL INFORMATION SUMMARY Summary This is revision1of SB6for the LRA-900Radio Altimeter. This revision adds reinstallation instructions for HY2and HY3to the Accomplishment instructions. This revision also deletes the instruction for removing U3from the RF assembly. Black bars in the margins indicate the changes. Replace the original issue with this revision. Service Bulletin Revision History REVISION DATE OF RELEASE Initial Release June8,2005 Revision1June29,2005 ?Copyright,2005Rockwell Collins,Inc.,All rights reserved Jun8/05LRA-900-34-6 1-Jun29/05Page1of13
航空无线电导航台和空中交通管制雷达站设置场地规范
MH/T4003-1996 航空无线电导航台和空中交通管制雷达站设置场地规范 1 范围 本标准规定了航空无线电导航台和空中交通管制(简称空管)雷达站和设置地点,是其所提供的方位、距离、位置等导航、雷达信息的基准点。 本标准适用于通用型导航和雷达设备,也适用于各类民有航空无线电导航台和空管雷达站新建台站的选址和台站建设以及已建台、站的场地管理一环境保护。 2 定义 本标准采用下列定义。 2.1 空中定位air fix point 为保证航空器的正常航行而规定的空中位置点。 2.2 切线飞行tangent flight 与以雷达天线为中心的圆相切的切线飞行,径向速度为零时,其一次雷达目标显示将会失效。 2.3 雷达遮蔽角(包括水平遮蔽角和垂直遮蔽解)screen angle 从雷达天线中心点和该点所在水平面向上算起的雷达电波信号被地形地物遮挡的垂直张角。
2.4 对称装定 symmetrical installation 精密进近雷达的航向天线相对于跑道平行线做对称扫描(即左右各100)的装定方式。 2.5 不对称装定 asymmetrical installation 精密进近雷达的航向天线相对于跑道平行线做左右不对称扫描(通常是向跑道方向扫描150,背跑道方向扫描50)的装定方式。 2.6 仪表着陆系统 instrument landing system (ILS) 它为飞机提供航向道、下滑道和距跑道着陆端的距离信息,用于复杂气象条件下,按仪表指示引导飞机进场着陆。包括甚高频(VHF)航向信标设备、超高频(UHF)下滑信标设备和甚高频(VHF)指点信标以及连带的监视系统、遥控和指示设备。 2.7 决断高/高度 decision altitude/decision height 按仪表着陆系统进场着陆时,决定复飞或继续进场的最低限定高/高度。 2.8 仪表着陆系统的I类运行标准 operational standards or ILS CAT I 使用仪表着陆设备,在不低于决断高度/高度60m,跑道能见度大于800m的最低气象条件下着陆。 2.9 仪表着陆系统的II类运行标准 operational standards or ILS CAT II 使用仪表着陆设备,在决断高/高度30m,跑道通见度大于400m的最低气象条件下着陆。
航电系统简介(仅限借鉴)
批准(签名):任课教员(签名): 年月日班次上课日期节次上课时数累计时数教学场所无线电 章 (节) 目:第二章航电系统 课题:航电系统 内容提要与质量要求:1、知道航电系统的概念;2、知道航电系统的发展历史和趋势。 重点与难点:航电系统的发展 器材与设备:多媒体教学课件 课前检查 顺序题目学员姓名成绩 1 谈谈对航电系统的认识。 2 3
4 教学方法教学内容时间 课前检查谈谈对航电系统的认识。 答:综合航空电子系统 2' 引言 航电系统 综合航空电子亦称航空电子,其英文“avionics”是由“aviation(航空)”和“electronics(电子学)”两词相结合,而派 生出来的。自二次世界大战后的几十年来,美 国、德国、法国、英国、前苏联(俄罗斯)先后 开展航空电子系统技术的研究,航空电子已经 成为一门独立的学科。 2' 一、航电系统的简介 航电系统全称“综合航空电子系统”,是 现代化战斗机的一个重要组成部分,战斗机的 作战性能与航空电子系统密切相关。可以说, 没有高性能的航电系统,就不可能有高效能作 战的战斗机。 多传感器综合(MSI)的目标是改变目前 各种传感器分立的状态,实现互为补充、互为 2' 教学内容、步骤、方法
教学方法教学内容时间 备份、扬长避短、综合使用各传感器提供的信 息;对多传感器实现综合的控制和管理,在现 有的硬件和软件水平上获得比任何单独的传 感器性能更高的传感器系统。 讲述法 根据PPT上飞机类型进 行讲解 二、航电系统的历史 在航空电子系统发展中系统结构不断演 变,因此航空电子系统的“结构”成为划时代 的主要依据。 (一)分立式结构 早期的航空电子系统为分立式结构,系统 由许多“独立的”子系统组成,每个子系统必 须依赖于驾驶员的操作(输入),驾驶员不断从 各子系统接收信息,保持对武器系统及外界态 势的了解,五十年代的战斗机F-100、F-101 等使用了典型的分立式结构。 (二)混合式结构 混合式结构是向综合化过渡的一种结构 形态,它出现了部分子系统之间的综合,例如 火控计算机、平显、火控雷达等之间的综合; 大气数据计算机、高度表、空速表、垂直速度 表、攻击传感器、大气温度传感器的组合;飞 5'
航天航空无线电导航的论文
电子科技大学电子信息工程学院 航天航空无线电导航 结业论文 关于星际航行定位系统的研究 学生姓名 学号 指导教师 2014年6月
仪(参考注释2)、姿态传感器等都可以为飞船提供精确的目的地指示和抵达时精确的减速。但是如果飞船进行到减速阶段时,飞船的导航控制将转为自动导航,不再需要人工控制了。可以让飞船自动航行。通过飞船自带的强大计算机系统,对感应器所接收的数据,进行分析,计算,并发出指令。这可以防止人类宇航员由于视觉效应做出错误的判断。也就是说:这是一艘名副其实的全自动探测飞船,因为目标恒星距离我们太远,将近4光年的距离不可能进行人工控制。飞船将在自主导航下对行星进行探测,这一切对导航系统也提出了更高的要求,例如要求精确提供目标恒星中各个行星的轨道参数等。这也带来了许多的问题。 最后,文章中提到了另一个问题,通信问题。地球和飞船要跨越几十光年的距离进行通信,并且还要将数据传回地球,可以利用激光传输。但这仍然是一个非常难以解决的问题。 文中最后提到了一个可行的设想是:在路途上提前发射多个探测器,作为中继制导的导航站,这就是“星座导航”(参考注释3)模式。在我看来,这就像人类日常生活中,通过建造数以万计的信号中转站,将信号从遥远的A地传到B地。通过一个个的导航站,飞船得以不断地前进,矫正方向,最终到达目的地。 注: *伊卡洛斯工程是一项由T au Zero基金会和英国星际学会牵头的星际航行工程,最终目标是建造一艘具备恒星间航行能力无人飞船,前往距离太阳系最近的恒星系统进行勘察,理论上星际航行将耗时100年; 1,人以左右眼看同样的对象,由于两眼间存在一定的水平距离,两眼所见角度不同,在视网膜上形成的像并不完全相同,如附图左右双眼同时观察一方柱所得的像,主要在水平方向上存在一定的差别,这种现象就是双眼视差;这两个像经过大脑综合以后就能区分物体的前后、远近,从而产生立体视觉,也就是使能产生深度(离观察点距离远近)的感知 2,星体跟踪器是一种装有光电装置或者照相机用来测量星体坐标的光学装置; 3,天上的星星(星座)有相对固定的运行轨迹,古时远舫的水手就是靠着观看星星的方位来确定自己的航向,这就叫星座导航。