一种新型感应加热电源调功方式的研究与计算机仿真
一种新型感应加热电源调功方式的研究与计算机仿真
韩晓敏1,尹海2,张光2
(1.山东大学控制科学与工程学院山东济南 250061;2.山东山大奥太电气有限公司山东济南 250101)
1 前言
感应加热电源是一种AC/DC/AC变换装置,它是利用电磁感应原理对工件进行加热的。由于感应加热具有加热速度快、热效率高、加热均匀及易于实现机械化、自动化等优点,在铸造熔炼、锻造毛坯加热、钢管弯曲、金属表面热处理、焊接、粉末冶金等行业中被广泛应用。由于加热工艺的需要,我们有必要对逆变器的输出功率加以控制。本文在对现有各种感应加热装置功率控制方式比较的基础上,提出一种新型的、较优的功率控制方式。
2几种调功方式的比较
由于感应加热过程中负载等效参数随温度而变化和加热工艺的需要,感应加热电源应对负载进行频率跟踪和功率调节。电流型逆变器一般是通过调节直流电压的大小调节功率。对电压型逆变器,由于可关断器件的发展,已有多种不同的调功方式。
2.1 直流调功方式
直流调功方式一种是采用输入可控整流来调节功率,另一种是斩波调压方式(不控整流加DC/DC变换器),通过调节DC/DC变换器的输出电压来调节感应加热电源的输出功率。直流调功可以大范围调节功率,而且功率调节的线性比较好。但是必须在逆变桥前级加可控电路,而且在需要加入功率因数校正的时候,直流调功较难实现。
2.2 逆变调功方式
逆变调功可以分为3类:
频率调制(PFM) 频率调制的方法就是调节逆变开关管的开关频率,从而改变输出阻抗来达到调节输出功率的目的。这种调功方式比较常用,优点是调节方法比较简单,而且较容易实现软开关。但是,功率调节线性不好,而且调节范围不大。
脉冲密度调制(PDM) PDM就是通过控制脉冲密度,从而控制输出平均功率,来达到控制功率的目的。这种控制方法较容易实现,但是由于是间断加热,所以加热效果不好。
脉冲宽度调制(PWM) PWM通过调节逆变开关管的一个周期内导通时间来调节输出功率。这种方法等同普通开关电源的调制方法,调节线性好,范围大,但是不容易实现软开关。
文献[1,2]都是基于传统移相PWM调功,即同一桥臂的上下开关管的驱动脉冲互补,使两原来同相的两个桥臂的开关管的驱动信号错开一个相位角,通过对错开相位角的控制即可达到输出功率控制的目的。为了防止电压源直流导通,需在驱动脉冲之间加入死区。这样就存在一种矛盾:电容缓冲效果与移相臂ZVS/ZCV软开关实现之间的矛盾。因此这种软开关设计仅在一定工作范围内可行。否则将会出现并联电容还未放电结束另路开关就开通的现象,导致瞬间的电流尖峰和较大的开通损耗。这样就限制了
缓冲电容的加大,所以传统移相调功仅适于中小功率感应加热电源。为了在功率大范围调节时仍能保持软开关条件,必须外加辅助缓冲支路如文献[3],这样子主回路结构就较复杂。
3新型调功方式
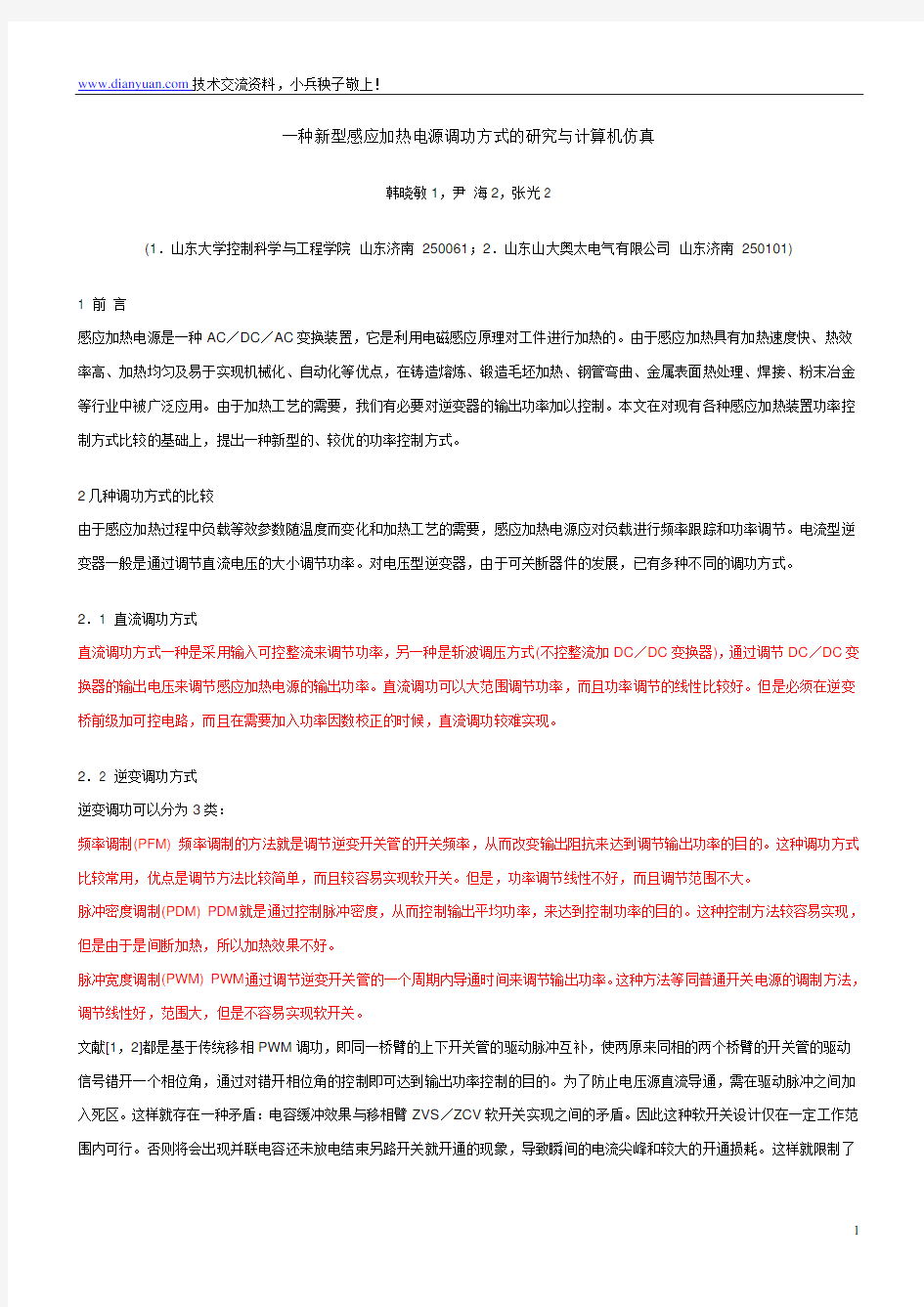
主回路选用软开关工作方式,前面已提到传统相移软开关方式功率调节范围窄,本文设计的新型调功方式可满足大中小感应加热电源。T1T4为超前臂,T2T3为滞后臂,T1T2T3T4选用大功率IGBT管。C1C2为超前臂并联电容。图1示出一种新型的电压型桥式逆变器的主电路,图2示出当电路工作于谐振状态时控制开关信号及逆变器负载电流与电压波形。下面分析主电路在一个工作周期内的工作原理。这种新型逆变器是通过调节超前臂的脉宽来调节功率的。
工作原理:
(1)t0~t1,T1T3导通,负载电流为正方向,沿回路:V+→Tl→C→R→L→T3→V一流通。负载电压为+V。
(2)t1时刻,T1关断。t1~t2,电流给电容C1充电,电容C4放电。由于电容C1的存在,所以T1为零电压关断。当电容电压充电到V+时,电流为负载环流,沿回路:T3→D4→C→R→L→T3流通。负载电压为零。
(3)t2时刻,T3关断,由于T3关断时,负载环流至电流很小,所以T3接近零电流关断。t2~t3,电流续流,沿回路:V一→D4→C→R→L→D2→V+流通。负载电压为一V。
(4)t3时刻,T2T4零电压开通,电流流向过程与以上3步是对称的。以上分析可以看出,两个桥臂的4个元件都工作于软开关状态。其中T1T4工作于零电流开通零电压关断状态,T2T3工作于零电流开通零电流关断状态。
由图2可见,当超前臂T1(T4)关断后,电流对超前臂并联电容C1(G)的充放电时间是随着电流的大小改变的。当关断电流较小时,电流对电容的充放电时间长,可以满足另一路桥臂的超前臂T4(T1)开通时,其并联电容两端电压为零。这样既解决了传统移相调功中存在的矛盾,又简化了主电路结构。
利用锁相环电路跟踪负载电流频率的变化,保证4个开关管都在电流过零点触发。使电路始终工作在弱感性状态。
4 仿真结果
为了验证上述的分析,研制一台工作频率为50 kHz的试验装置。本文用Matlab对主回路进行仿真。4.1 逆变器静态仿真
(1)图3所示波形由上至下分别为:逆变器输出电流、超前臂电压与超前臂驱动波形。
由图3可以看出,当超前臂关断时,开关管电压缓慢上升,从而实现了超前臂零电压关断。
(2)如图4所示,波形由上至下分别为:逆变器输出电流、滞后臂电压与滞后臂驱动波形。
由图4可以看出,当滞后臂开通与关断时,负载电流都接近于零,从而实现了滞后臂的软开关。
(3)输出电流与负载电压波形
通过调节超前臂脉宽可以调节输出功率如图5所示。
(4)四路驱动波形如图6所示。
4.2 逆变器动态仿真
(1)负载电流与电压波形
由图7可以看出:当负载参数变化时,负载回路的谐振频率也随之变化,并且负载电压的频率与脉宽也同时改变。即此种新型逆变器实现了PFM&PWM控制方式。如图7所示。
(2)四路驱动波形
由图8可以看出,调节输出功率时,四路驱动脉宽与频率都随之变化。
5 实验结果
为验证提出方法的可行性,设计了一台40 kW/50 kHz的样机。实验结果如图9所示(图中上面为输出电压波形,下面为负载电流波形),电源工作在感性状态。
图10上中下波形分别为:超前臂驱动,超前臂电压波形,负载电流波形。
由图10可以看出:当超前臂关断时,其两端电压缓慢上升,从而实现了超前臂的软开关。
6 结语
本文提出了一种新型的功率调节控制策略,这种控制策略性能优越,逻辑明了,实现简单易行。并且进行了实验验证。
计算机仿真技术的发展概述及认识
学院 专业 届别 课程 班级 姓名 学号 联系方式 指导老师2012年5月
计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 Discussionand understanding of the development of computer simulation technology Abstract:In the field of scientific research, computer technology and simulation technology is the combination of computer simulation technology as a new method of scientific research applied to various fields, used to solve the problems of pure mathematical methods or practical experiments can not be solved, has a positive role in promoting the formation of scientific research and technological achievements. In the theory of computer simulation technology based on the idea of computer simulation technology to produce the basic reason people use computer simulation to solve the problem of the advantages of where to discuss the links and
通信对抗原理大作业题目
通信对抗原理仿真大作业题目 基本要求:仿真大作业分组完成,每个组3~5人,至少选择4个题目,并且在每一类中至少选择一个题目。利用MATLAB完成计算机仿真,并且撰写仿真实验报告。大作业完成情况将作为评价平时成绩的依据。 第一类:测频方法仿真 1.FFT法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以上, 基于FFT法进行载波频率测量。画出信号的时域、频域波形,给出FFT法测量的结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 2.互相关法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以上, 基于互相关法进行载波频率测量。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 3.相位差分法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以 上,基于相位差分法法进行载波频率测量。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 第二类:测向方法仿真 4.相位干涉仪测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上, 基于相位干涉仪测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出到达方向测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 5.到达时差测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基 于到达时差测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,观察相关函数,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。6.多普勒测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基于 多普勒测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 7.沃森-瓦特测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基 于沃森-瓦特测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 第三类:信号处理技术仿真 8.信号带宽和幅度测量方法仿真。仿真模拟通信信号或者数字通信信号三种以 上,基于FFT法进行信号带宽、信号相对幅度测量。画出信号的时域、频域
计算机仿真试题和答案
控制系统计算机辅助设计 综合实验指导 实验名称:连续与离散系统校正实验,系统可控性与可观性实验,系统的simulink仿真实验 陈茜编 实验人:苏建聪 学号:200830810122 班级:08电气工程及其自动化1班 信息工程系
实验任务书 1. 有一个单位负反馈控制系统,如果控制对象的传递函数为 设计要求: ① 相角裕度≥45°; ② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。 ③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。 2. 有一个单位负反馈控制系统,如果控制对象的传递函数为: 试设计一个串联滞后校正装置。 设计要求: ①相角裕度≥45°; ② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。 ③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。 3. 有一个单位负反馈控制系统,如果控制对象的传递函数为 ()() 4+= s s k s G p 试设计一个串联超前滞后校正装置,设计要求: ①相角裕度≥45°; ② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。 ③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。 4. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象()() 110+= s s s G ,()s G h 为 零阶保持器。用W 变换法设计一超前校正装置D(z),使系统相位裕度γ≥50°,校验设计后系统的性能指标。 5. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象1) s(0.2s k )(+= s G ο, () s G h 为零阶保持器。用对数频率法设计D(z),使系统开环增益k ≥30(1/s),截
计算机仿真技术的发展概述及认识
计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 一、引言 计算机仿真技术是以多种学科和理论为基础,以计算机及其相应的软件为工具,通过虚拟试验的方法来分析和解决问题的一门综合性技术。计算机仿真(模拟)早期称为蒙特卡罗方法,是一门利用随机数实验求解随机问题的方法。其原理可追溯到1773年法国自然学家G.L.L.Buffon为估计圆周率值所进行的物理实验。根据仿真过程中所采用计算机类型的不同,计算机仿真大致经历了模拟机仿真、模拟-数字混合机仿真和数字机仿真三个大的阶段。20世纪50年代计算机仿真主要采用模拟机;60年代后串行处理数字机逐渐应用到仿真之中,但难以满足航天、化工等大规模复杂系统对仿真时限的要求;到了70年代模拟-数字混合机曾一度应用于飞行仿真、卫星仿真和核反应堆仿真等众多高技术研究领域;80年代后由于并行处理技术的发展,数字机才最终成为计算机仿真的主流。现在,计算机仿真技术已经在机械制造、航空航天、交通运输、船舶工程、经济管理、工程建设、军事模拟以及医疗卫生等领域得到了广泛的应用。 二、基本概念 模拟:(Simulation)应用模型和计算机开展地理过程数值和非数值分析。不是去求系统方程的解析解,而是从系统某初始状态出发,去计算短暂时间之后接着发生的状态,再以此为初始状态不断的重复,就能展示系统的行为模式。模拟是对真实事物或者过程的虚拟。模拟要表现出选定的物理系统或抽象系统的关键特性。模拟的关键问题包括有效信息的获取、关键特性和表现的选定、近似简化和假设的应用,以及模拟的重现度和有效性。可以认为仿真是一种重现系统外在表现的特殊的模拟。 仿真:(Emulation)利用模型复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或设计中的系统,又称模拟。即使用项目模型将特定于某一具体层次的不确定性转化为它们对目标的影响,该影响是在项目仿真项目
SG3525调频控制的感应加热电源
SG3525调频控制的感应加热电源 文件大小:更新时间:2012.08.11 下载地址:DOWNLOAD 感应加热技术具有加热温度高、加热效率高、速度快、加热温度容易控制、易于实现机械化、自动化、无空气污染等优点,现在感应加热电源已广泛用于金属熔炼、透热、热处理和焊接等工业过程。 根据功率调节量的不同感应加热电源有多种调功方式,调频调功是通过改变逆变器工作频率从而改变负载输出阻抗以达到调节输出功率的目的[1]。这种调功方式控制比较简单,可以对电路的工作频率进行直接控制,而且能对功率连续调整。本文正是基于调频调功这种方式,由PWM控制芯片SG3525控制实现的加热电源。 2.主电路拓扑结构和控制原理: 2.1 主电路结构: 本文设计的感应加热电源为串联谐振式全桥IGBT逆变电源,其逆变主电路结构如图1所示。输入采用三相AC/DC不控整流,输出采用负载串联谐振式全桥DC/AC逆变电路。整流输出的电压经高压大电容C1滤波,逆变器主开关器件Q1、Q2、Q3、Q4为IGBT,D1、D2、D3、D4为反并联二极管。
图1 主电路结构图 2.2控制原理 调频控制的原理就是:通过改变逆变器开关频率来改变输出阻抗以达到调节输出功率的目的。串联谐振等效电路图如图2所示。 图2 负载等效电路图
负载等效阻抗为Z=1/jωC +jωL+R ;则|Z|= = ,其中f=1/(2 π)谐振频率。f=f0时,负载等效阻抗最小,|Z|=R,此时功率输出最大;f >f0时,负载呈感性,且频率越大感抗越大,功率减小;f 得分 评分人 填空题: (20分,每题2 分) 单选题:(10分,每题1分) A.任何虚页都可装入主存中任何实页的位置 B. 一个虚页只装进固定的主存实页位置 《计算机系统结构》期末考试试卷(A ) 得分 注:1、共100分,考试时间120分钟。 2、此试卷适用于计算机科学与技术本科专业。 1、."启动I/O"指令是主要的输入输出指令,是属于( A. 目态指令 B.管态指令 C.目态、管态都能用的指令 D.编译程序只能用的指令 2、 输入输出系统硬件的功能对 (B )是透明的 A.操作系统程序员 B.应用程序员 C.系统结构设计人员 D.机器语言程序设计员 3、 全相联地址映象是指(A ) C. 组之间固定,组内任何虚页可装入任何实页位置 D.组间可任意装入,组内是固定装入 4、( C ) 属于MIMD 系统结构 A.各处理单元同时受一个控制单元的管理 B.各处理单元同时受同个控制单元送来的指令 C.松耦合多处理机和多计算机系统 D. 阵列处理机 5、多处理机上两个程序段之间若有先写后读的数据相关,则( B ) A.可以并行执行 B.不可能并行 C.任何情况均可交换串行 D.必须并行执行 6、 计算机使用的语言是(B ) A.专属软件范畴,与计算机体系结构无关 B.分属于计算机系统各个层次 C.属于用以建立一个用户的应用环境 D. 属于符号化的机器指令 7、 指令执行结果出现异常引起的中断是( C ) A.输入/输出中断 B.机器校验中断 C.程序性中断 D.外部中断 &块冲突概率最高的 Cache 地址映象方式是(A ) A.直接 B .组相联 C .段相联 D .全相联 9、 组相联映象、LRU 替换的Cache 存储器,不影响 Cache 命中率的是(B ) A.增大块的大小 B .增大主存容量 C .增大组的大小 D .增加Cache 中的块数 10、 流水处理机对全局性相关的处理不 包括(C ) A.猜测法 B.提前形成条件码 C.加快短循环程序的执行 D.设置相关专用通路 《控制系统数字仿真》课程 大作业 姓名: 学号: 班级: 日期: 同组人员: 目录 一、引言 (2) 二、设计方法 (2) 1、系统数学模型 (2) 2、系统性能指标 (4) 2.1 绘制系统阶跃响应曲线、根轨迹图、频率特性 (4) 2.2 稳定性分析 (6) 2.3 性能指标分析 (6) 3、控制器设计 (6) 三、深入探讨 (9) 1、比例-微分控制器(PD) (9) 2、比例-积分控制(PI) (12) 3、比例-微分-积分控制器(PID) (14) 四、设计总结 (17) 五、心得体会 (18) 六、参考文献 (18) 一、引言 MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。 随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。不仅如此,自动控制技术的应用范围现在已发展到生物、医学、环境、经济管理和其它许多社会领域中,成为现代社会生活中不可或缺的一部分。随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,控制理论和技术必将进一步发挥更加重要的作用。作为一个自动化专业的学生,了解和掌握自动控制的有关知识是十分必要的。 利用MATLAB软件及其SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真,能够直观、快速地分析系统的动态性能和稳态性能,并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计,以满足特定的设计指标。 二、设计方法 1、系统数学模型 美国卡耐尔基-梅隆大学机器人研究所开发研制了一套用于星际探索的系统,其目标机器人是一个六足步行机器人,如图(a)所示。该机器人单足控制系统结构图如图(b)所示。 要求: (1)建立系统数学模型; (2)绘制系统阶跃响应曲线、根轨迹图、频率特性; (3)分析系统的稳定性,及性能指标; (4)设计控制器Gc(s),使系统指标满足:ts<10s,ess=0,,超调量小于5%。 计算机系统结构期末考试试题及其答案 《计算机系统结构》期末考试试卷A 卷第 2 页 共 24 页 计算机科学系《计算机系统结构》期末考试试卷(A 卷) 2、此试卷适用于计算机科学与技术本科专业。 一 单选题:(10分,每题1分) 1、 ."启动I/O"指令是主要的输入输出指 令,是属于( B ) A.目态指令 B.管态指令 C.目态、管态都能用的指令 D.编译程序只能用的指令 2、 输入输出系统硬件的功能对(B )是透 明的 A.操作系统程序员 B.应用程序员 C.系统结构设计人员 D.机器语言程序设计员 3、 全相联地址映象是指(A ) A.任何虚页都可装入主存中任何实页的位置 B.一个虚页只装进固定的主存实页位置 C.组之间固定,组内任何虚页可装入任何实页位 置 D.组间可任意装入,组内是固定装入 4、( C ) 属于MIMD系统结构 A.各处理单元同时受一个控制单元的管理 B.各处理单元同时受同个控制单元送来的指令 C.松耦合多处理机和多计算机系统 D.阵列处理机 5、多处理机上两个程序段之间若有先写 后读的数据相关,则(B ) A.可以并行执行 B.不可能并行 C.任何情况均可交换串行 D.必须并行执行 6、计算机使用的语言是(B) A.专属软件范畴,与计算机体系结构无关 B.分属于计算机系统各个层次 C.属于用以建立一个用户的应用环境 D.属于符号化的机器指令 7、指令执行结果出现异常引起的中断是 (C ) A.输入/输出中断 B.机器校验中断 C.程序性中断 D.外部中断 《计算机系统结构》期末考试试卷A卷第 3 页共 24 页 通信原理大作业 1、说明 在通信原理课程中,介绍了通信系统的基本理论,主要包括信道、基带传输、调制 / 解调方法等。为了进一步提高和改善学生对课程基本内容的掌握,进行课程作业方法的改革的试点,设立计算机仿真大作业。成绩将计入平时成绩。 2、要求 参加的同学3~5人一组,选择1?2个题目,协作和共同完成计算机编程和仿真,写出计算机仿真报告。推荐的计算机仿真环境为MATLAB也可以 选择其它环境。 3、大作业选题 (1) 信道噪声特性仿真产生信道高斯白噪声,设计信道带通滤波器对高斯白噪 声进行滤波, 得到窄带高斯噪声。对信道带通滤波器的输入输出的噪声的时域、频域特性进行统计和分析,画出其时域和频域的图形。 (2) 基带传输特性仿真利用理想低通滤波器作为信道,产生基带信号,仿真验证奈氏第一准则的给出的关系。改变低通滤波器的特性,再次进行仿真,验证存在码间干扰时的基带系统输出,画出眼图进行观察。加入信道噪声后再观 察眼图。 (3) 2ASK言号传输仿真 按照2ASK产生模型和解调模型分别产生2ASK言号和高斯白噪声,经过信道传 输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2ASK信号的解调可以选用包络解调或者相干解调法。(4) 2FSK信号传输仿真 按照2FSK产生模型和解调模型分别产生2FSK信号和高斯白噪声,经过信道传输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2FSK信号的解调可以选用包络解调或者相干解调法。(5) 2PSK信号传输仿真 按照2PSK产生模型和解调模型分别产生2PSK言号和高斯白噪声,经过信道传输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2PSK信号的解调选用相干解调法。 ⑹2DPSK言号传输仿真 按照2DPSK产生模型和解调模型分别产生2DPSK言号和高斯白噪声,经过信道传输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2DPSK信号的解调可以选用非相干解调或者相干解调法。 (7) 模拟信号的数字传输 产生模拟语音信号,进行PCM编码过程的计算机仿真。仿真发送端采样、 量化编码的过程、仿真接收端恢复语音信号的过程。按照有或者无信道噪 声两种情况分别进行仿真。 第0章绪论 0-1 什么是仿真?它所遵循的基本原则是什么? 答: 仿真是建立在控制理论、相似理论、信息处理技术和计算机技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识、统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。 它所遵循的基本原则是相似原理。 0-2 仿真的分类有几种?为什么? 答: 依据相似原理来分:物理仿真、数学仿真和混合仿真。 物理仿真:就是应用几何相似原理,制作一个与实际系统相似但几何尺寸较小或较大的物理模型(例如飞机模型放在气流场相似的风洞中)进行实验研究。 数学仿真:就是应用数学相似原理,构成数学模型在计算机上进行研究。它由软硬件仿真环境、动画、图形显示、输出打印设备等组成。 混合仿真又称数学物理仿真,它是为了提高仿真的可信度或者针对一些难以建模的实体,在系统研究中往往把数学仿真、物理仿真和实体结合起来组成一个复杂的仿真系统,这种在仿真环节中有部分实物介入的混合仿真也称为半实物仿真或者半物理仿真。 0-3 比较物理仿真和数学仿真的优缺点。 答: 在仿真研究中,数学仿真只要有一台数学仿真设备(如计算机等),就可以对不同的控制系统进行仿真实验和研究,而且,进行一次仿真实验研究的准备工作也比较简单,主要是受控系统的建模、控制方式的确立和计算机编程。数学仿真实验所需的时间比物理仿真大大缩短,实验数据的处理也比物理仿真简单的多。 与数学仿真相比,物理仿真总是有实物介入,效果直观逼真,精度高,可信度高,具有实时性与在线性的特点;但其需要进行大量的设备制造、安装、接线及调试工作,结构复杂,造价较高,耗时过长,灵活性差,改变参数困难,模型难以重用,通用性不强。 0-4 简述计算机仿真的过程。 答: 第一步:根据仿真目的确定仿真方案 根据仿真目的确定相应的仿真结构和方法,规定仿真的边界条件与约束条件。 第二步:建立系统的数学模型 对于简单的系统,可以通过某些基本定律来建立数学模型。而对于复杂的系统,则必须利用实验方法通过系统辩识技术来建立数学模型。数学模型是系统仿真的依据,所以,数学模型的准确性是十分重要。 感应加热电源的控制与驱动电路 感应加热电源中电力电子控制电路的构成,显现出多样化组成方式,其控制方案主要是根据感应电源调功方式、加热负载特性要求等不同,控制电路的结构会有所不同。 感应加热电源的功率控制调节方式总体上可分为直流侧调功和逆变侧调功两种。直流侧调功又分为三相全控整流器调功和直流斩波器调压调功。逆变侧调功的控制电路方案根据加热工艺特性要求,可以采用的控制方式更灵活, 常用的有调频功(PFM )、移相调功(PSM)、脉宽调制恒频调功(PWM )、脉冲密度调制调功(PDM )、调宽调制加调频调功(PWM+PFM )、脉宽调制加脉冲密度调制调功(PWM+PDM )等各种调功方式。 下面就感应加热电源控制电路的基本组成和原则作简单叙述,其具体内容将在相关章节中介绍。 (1)控制方式根据感应加热电源负载特性不同,调功方法不同,通常可采用电压反馈控制、电流反馈控制。 1)采用电压控制,其目的是保证输出直流母线电压恒定,也就是说加在感应加热绕组的端电压恒定。控制采样可以取自直流母线电压或逆变器电感绕组或谐振补偿电容上的电压。取样一般采用隔离式电压传感器(TV),经道算、比较处理,控制品闸管的导通角或逆变器开关管PWM 驱动脉冲的相移或脉宽,达到改变直流输出到逆变器直流母线上的电压或改变逆变器输出电压的平均值(或有效值),最终因闭环负反馈的作用维持输出电压恒定。输人电压的波动,对加热电源的输出功率也就是对工件的加热温度产生较大影响,将直接影响到加热工件的产品工艺质量要求。 加热电源的输出功率为P =u 2/Z,在负载不变的条件下,功率P 与电压组或谐振补偿电容上的电压。u 的平方成正比。也就是说,加热温度与电压的平方成正比。如果电压不稳定,加热温度就不均匀,对于毛坯工件加热、淬火要求温度稳定性较高的场合,必须要有自动稳压功能,否则产品质單得不到保证。 2)采用电流控制,其目的是保证输出直流或高频输出电流恒定。控制采样可取自直流母线电流或逆变器感应加热绕组中的电流。取样一般采用隔离式电流传感器感(TA ),电流反馈信号控制的对象同电压控制,目的是达到输出电流的变化,也就是输出功率P 的变化、加热温度的 变化。这是因为P=IU u z u z u =?? ? ??=2,因此可以看出,电压U 或负载阻抗Z 的变化,会引起电流I 的变化,即功率或加热温度的变化。 3)采用功率控制,其目的是为了保证感应加热电源的恒功率输出。采样信号同时取样电压和电流信号,经乘法器处理后,经PI 调节器输出与功率给定相比较,控制晶闸管的导通角或逆变器驱动脉冲信号的宽度、相移,或采用动态阻抗匹配法控制电源侧的等效阻抗与负载相等,达到功率的恒定,保证加热温度在给定的功率下恒定,满足工件加热工艺特性和质量要求。 (2)采用直流侧调月i 调功方案的感应加热电源,其控制电路需要有锁相频率自动跟踪系统。无.论是逆变器采用脉宽调制(PwM)控制技本调功,还是采用移相(PSM)调功等,如果逆变侧不进行频率自动照際,会出现两大问题:①逆变器的开关功率器件不能很好地工作在软开关状态,开关器件承受的电压和电流应力大,除了危及器件安全外,开关损耗也增大;②因为逆变器工作频率与谐振电路的固有谐振频率不相等,逆变器回路或者说开关器件中流过较大的无功电流,而且功率因数下降,达不到最大功率输出,逆变器的效率降。频率跟踪的目的是保证逆变器的开关频 控制系统仿真大作业 1、曲线拟合的Matlab实现和优化度检验 通过一个实际的例子,介绍最小二乘曲线拟合法的基本原理,对最小二乘曲线拟合法的Matlab实现方法进行研究,并给出曲线拟合Matlab实现的源程序。论述了Matlab软件在做曲线拟合时的用法,并进行曲线的拟合和相应的图像。 2、基于Matlab的液位串级控制系统 运用组态王和Matlab混合编程的方法设计了一个双容(两个水箱串联)液位串级在线控制系统,由组态王编制人机交互界面,用Matlab完成控制算法,二者通过DDE进行实时数据交换;采用串级控制策略,减小二次干扰的影响,验证其方法的有效性。 3、基于Matlab的变压器差动保护闭环仿真研究 应用Matlab建立了微机保护仿真系统,并对不同原理的变压器差动保护进行了仿真和比较.仿真系统采用积木式结构,根据微机保护的实现原理构建模块,实现保护的闭环仿真,对保护的动作过程进行分析. 4、基于MATLAB/SIMULINK的交流电机调速系统建模与仿真 根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造了一个交流电机调速系统,该系统能够很好地模拟真实系统,实现高效的调速系统设计。仿真结果验证该方法的有效性。 5、基于MCGS和MATLAB的薄膜厚度控制系统仿真 以MCGS组态软件和MATLAB为平台,设计和仿真了一个薄膜厚度控制系统.MCGS完成硬件接口的设置、数据的实时采集、人机对话、以动画的方式显示控制系统的运行情况,MATLAB完成PID参数的自动整定,并利用动态数据交换(DDE)技术建立两者间的通讯.并分析其仿真结果。 6、Matlab在动态电路分析中的应用 用Matlab计算动态电路,可得到解析解和波形图.一阶电路先计算3要素,后合成解 二感应加热基本原理 1.电磁感应原理 1831年,英国物理学家faraday发现了电磁感应现象,并且提出了相应的理论解释。其内容为,当电路围绕的区域内存在交变的磁场时,电路两端就会感应出电动势,如果闭合就会产生感应电流。 利用高频电压或电流来加热通常有两种方法: (1)电介质加热:利用高频电压(比如微波炉加热) (2)感应加热:利用高频电流(比如密封包装) 2.电介质加热(dielectric heating) 电介质加热通常用来加热不导电材料,比如木材。同时微波炉也是利用这个原理。原理如图1: 图1 电介质加热示意图 当高频电压加在两极板层上,就会在两极之间产生交变的电场。需要加热的介质处于交变的电场中,介质中的极分子或者离子就会随着电场做同频的旋转或振动,从而产生热量,达到加热效果。 3.感应加热(induction heating) 感应加热原理为产生交变的电流,从而产生交变的磁场,再利用交变磁场来产生涡流达到加热的效果。如图2: 图2 感应加热示意图 基本电磁定律: 法拉第定律:d e N dt φ= 安培定律:Hdl NI ?= 其中:BdS φ=?,0r B u u H = 如果采用MKS 制,e 的单位为V ,?的单位为Wb ,H 的单位为A/m ,B 的单位为T 。 以上定律基本阐述了电磁感应的基本性质, 集肤效应: 当交流的电流流过导体的时候,会在导体中产生感应电流(如图3),从而导致电流向导体表面扩散。也就是导体表面的电流密度会大于中心的电流密度。这也就无形中减少了导体的导电截面,从而增加了导体交流电阻,损耗增大。工程上规定从导体表面到电流密度为导体表面的1/e =0.368的距离δ为集肤深度。 在常温下可用以下公式来计算铜的集肤深度: 7.5 δ= 式(1) 图3 涡流产生示意图 从以上可以看到,如果增大电流和提高频率都可以增加发热效果,是加热对象快速升温。所以感应电源通常需要输出高频大电流。 参考文献:fundalmentals of power electronics, R.W .Erickson (讲义) TPIH2500 Textbook Tetra Pak Technical Training Centre 三 感应加热电源常见框图结构和控制方法 1.感应加热电源常见框图 高频感应加热电源工作原理【大比特导读】高频感应加热电源在工作原理方面,也与普通的加热电源有 着很大不同,本文将会通过对其工作原理的叙述,为大家解读高频感应加热电源加热快、效率高的秘密所在。 感应加热电源的研发在最近几年呈现出专业化和快速的趋势,高频感应加热电源凭借着加热速度快、加热均匀等优势,被广泛的应用在工业及生活领域。高频感应加热电源在工作原理方面,也与普通的加热电源有着很大不同,本文将会通过对其工作原理的叙述,为大家解读高频感应加热电源加热快、效率高的秘密所在。 高频感应加热电源与普通的感应加热模块一样,也是采用了导体磁束加热的模式。用交流电流流向被卷曲成环状的导体,这种导体通常情况下会采用铜管这种材料,由此产生磁束。将金属放置其中,磁束就会贯通金属体,在与磁束自缴的方向产生涡电流,也就是大家所熟悉的旋转电流,于是感应电流在涡电流的影响下产生发热,用这样的加热方式就是感应加热。由此,对金属等被加热物体在无需直接接触的状态下就能获得加热效果。 此时,窝电流将会在线圈接近的物体上集中,感应加热表现出在物体的表面上较强里边较弱的特点,用这样的原理来对被加热体的必要的地方集中加热,达到瞬间加热的效果,从而提高生产效率和工作量等。 当然了,使用高频感应加热电源进行加热的成功与否,直接取决于感应线圈设置是否合理,以及加热体的大小、形状、间距等等。感应线圈是要做到均匀加热、加热效果好,并且要有强度和准确度。感应线圈是一般用一圈或数圈的铜管来做,一般采用水冷的方式对线圈进行冷却。 结语: 高频感应加热电源的感应线圈是高效加热的关键所在,而无需直接触碰就可以快速加热 的优势,也让这个感应加热电源的家族新成员迅速获得了生产商的认可。 中华女子学院 成绩2014 — 2015学年第二学期期末考试 (论文类) 论文题目数学建模算法之蒙特卡罗算法 课程代码1077080001 课程名称数学建模 学号130801019 姓名陈可心 院系计算机系 专业计算机科学与技术 考试时间2015年5月27日 一、数学建模十大算法 1、蒙特卡罗算法 该算法又称随机性模拟算法,是通过计算机仿真来解决问题的算法,同时可以通过模拟可以来检验自己模型的正确性,是比赛时必用的方法。接下来本文将着重介绍这一算法。 2、数据拟合、参数估计、插值等数据处理算法 比赛中通常会遇到大量的数据需要处理,而处理数据的关键就在于这些算法,通常使用Matlab作为工具。 3、线性规划、整数规划、多元规划、二次规划等规划类问题 建模竞赛大多数问题属于最优化问题,很多时候这些问题可以用数学规划算法来描述,通常使用Lindo、Lingo软件实现。这个也是我们数学建模选修课时主要介绍的问题,所以对这方面比较熟悉,也了解了Lindo、Lingo软件的基本用法。 4、图论算法 这类算法可以分为很多种,包括最短路、网络流、二分图等算法,涉及到图论的问题可以用这些方法解决,上学期数据结构课程以及离散数学课程中都有介绍。它提供了对很多问题都很有效的一种简单而系统的建模方式。 5、动态规划、回溯搜索、分治算法、分支定界等计算机算法 这些算法是算法设计中比较常用的方法,很多场合可以用到竞赛中 6、最优化理论的三大非经典算法:模拟退火法、神经网络、遗传算法 这些问题是用来解决一些较困难的最优化问题的算法,对于有些问题非常有帮助,但是算法的实现比较困难,需慎重使用。 7、网格算法和穷举法 网格算法和穷举法都是暴力搜索最优点的算法,在很多竞赛题中有应用,当重点讨论模型本身而轻视算法的时候,可以使用这种暴力方案,最好使用一些高级语言作为编程工具。 8、一些连续离散化方法 很多问题都是实际来的,数据可以是连续的,而计算机只认的是离散的数据,因此将其离散化后进行差分代替微分、求和代替积分等思想是非常重要的。 9、数值分析算法 如果在比赛中采用高级语言进行编程的话,那一些数值分析中常用的算法比如方程组求解、矩阵运算、函数积分等算法就需要额外编写库函数进行调用。10、图象处理算法 赛题中有一类问题与图形有关,即使与图形无关,论文中也应该要不乏图片的,这些图形如何展示以及如何处理就是需要解决的问题,通常使用Matlab进行处理。 二、蒙特卡罗方法 2.1算法简介 蒙特·卡罗方法(Monte Carlo method),也称统计模拟方法,1946年,美国拉斯阿莫斯国家实验室的三位科学家John von Neumann,Stan Ulam 和 Nick 、数值计算,编程完成以下各题(共20分,每小题5 分) 1、脉冲宽度为d,周期为T的矩形脉冲的傅里叶级数如下式描述: d[i.^= sin(^d/T)cos(^:n.) T n」n rd /T 当n =150,d..「T =1;4,- 1/2 :::.::: 1/2,绘制出函数f(.)的图形。 解: syms n t; f=((si n(n *pi/4))/( n*pi/4))*cos(2*pi* n*t); s=symsum(f, n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y) 2 0 05x2 5 ■ 5 2、画出函数f (x)二(sin 5x) e .- 5x cos1.5x 1.5x 5.5 x 在区间[3, 5]的图形,求出该函数在区间[3, 5]中的最小值点X min和函数的最小值f min . 解:程序如下 x=3:0.05:5; y=(si n(5*x).A2).*exp(0.05*x.A2)-5*(x.A5).*cos(1.5*x)+1.5*abs(x+5.5)+x.A2.5; mix_where=fi nd(y==mi n(y)); xmin=x(mix_where); hold on; plot(x,y); plot(xmi n,min (y),'go','li newidth',5); str=strcat('(' ,nu m2str(xmi n),',' ,nu m2str(mi n(y)),')'); text(xmi n,min (y),str); Ylabel('f(x)') 经过运行后得到的图像截图如下: 运行后的最小值点X min =4.6 , f m in = -8337.8625 3、画出函数f (x) = cos2x「e^'x — 2.5 X在口,3]区间的图形, 解该非线 并用编程求性方程 f (x) = 0的一个根,设初始点为X o = 2 . 解: x=1:0.02:3; x0=2; y=@(x)(cos(x).A2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)') X仁fzero('(cos(x).A2).*exp(-0.3*x)-2.5*abs(x)',x0) 运行后求得该方程的一个根为z=0.3256 。 4、已知非线性方程组如下,编程求方程组的解,设初始点为[1 0.5 -1]. 利用SG3525实现调频控制的感应加热电源 1.引言: 感应加热技术具有加热温度高、加热效率高、速度快、加热温度容易控制、易于实现机械化、自动化、无空气污染等优点,现在感应加热电源已广泛用于金属熔炼、透热、热处理和焊接等工业过程。 根据功率调节量的不同感应加热电源有多种调功方式,调频调功是通过改变逆变器工作频率从而改变负载输出阻抗以达到调节输出功率的目的[1]。这种调功方式控制比较简单,可以对电路的工作频率进行直接控制,而且能对功率连续调整。本文正是基于调频调功这种方式,由PWM控制芯片SG3525控制实现的加热电源。 2.主电路拓扑结构和控制原理: 2.1 主电路结构: 本文设计的感应加热电源为串联谐振式全桥IGBT逆变电源,其逆变主电路结构如图1所示。输入采用三相AC/DC不控整流,输出采用负载串联谐振式全桥DC/AC逆变电路。整流输出的电压经高压大电容C1滤波,逆变器主开关器件Q1、Q2、Q3、Q4为IGBT,D1、D2、D3、D4为反并联二极管。 图1 主电路结构图 2.2控制原理 调频控制的原理就是:通过改变逆变器开关频率来改变输出阻抗以达到调节输出功率的目的。串联谐振等效电路图如图2所示。 图2 负载等效电路图 负载等效阻抗为Z=1/jωC +jωL+R ;则|Z|= = ,其中f=1/(2π)谐振频率。f=f0时,负载等效阻抗最小,|Z| =R,此时功率输出最大;f >f0时,负载呈感性,且频率越大感抗越大,功率减小;f 感应加热电源常见问题解读 在感应加热电源的设备调试和日常使用过程中,工程师常常需要临时解决其出现的突发情况,这就需要工程师结合感应加热电源的设计方案和理论知识,及时进行处理。在今天的文章中,我们为大家总结了三种在平时比较常遇到的问题并进行解读,下面就让我们一起来看看这些问题都有哪些吧。 常见问题一:感应加热电源的烟气问题应该怎么处理比较稳妥? 对于感应加热电源来说,想要正确处理其烟气问题,我们可以从两个方面来入手,即通常所说的烟气净化或设置烟气捕集装置。先来看烟气净化方式,想要实现对感应加热设备的烟气净化,只有靠除尘器来实现,而除尘器选择的优劣直接影响到除尘系统的捕集效果、除尘电耗以及整个系统能否长期稳定、可靠运行、除尘器的形式繁多,各有利弊。关键在于如何扬长避短,与系统工艺及粉尘组成相适应以获得最佳效果。而设置烟气捕集装置则相对来说繁琐一些,其设置的内容主要包括回转式伞顶吸罩、低阻、大流量管道+调温电动蝶阀、 离线气管式脉冲除尘器、锅炉引风机等。这两种方法的选择,需要工程师依据实际情况进行判断。 常见问题二:感应加热电源在开机工作时有哪些问题需要特别注意一下? 通常情况下,在感应加热电源的工作过程中,有三类问题需要我们特别注意,分别是水资源短缺、电压过高和电气接地阴极电容设置。先来看水资源短缺问题,在长期使用感应加热设备的过程中,可能会出现因冷却水管水垢或阻塞电容而引起的电力电容器过热和燃烧问题,因此,我们应特别注意在水流量的排放情况,一旦发现排放不正常,则应该使用适当的措施。电气接地阴极电容也是需要特别注意的,电绝缘电容一旦发生损坏,很容易造成故障,因此需要工程师及时排查问题,及时处理故障的电容柜绝缘点。电压过高的情况也同样需 2019-2020学年第2学期 《文献信息检索与利用》期末大作业 姓名:吴培宇 学号:20181620310088 学院:计算机与网络空间安全学院 年级:2018级 专业:软件工程(NIIT)大数据2班 任课老师:李保红 成绩: 《文献信息检索与利用》期末大作业 一、课题名称(需包含3个及其以上的检索词,要求在学委处报备,10分) 人工智能与建构主义在计算机辅助教学中的应用 二、课题分析(10分) 1、课题来源(2分,基于兴趣,或者参与的课题,或者拟定的毕业论文) 在学习的知识中对人工智能比较感兴趣。 2、给出课题中涉及的检索词 (1)中文检索词(4分,说明检索词的拓展补充角度,所参考的平台或工具书,并截屏): 人工智能(AI): 建构主义: 计算机辅助教学(CAI): (2)英文检索词(4分,说明检索词扩充角度,所参考的平台或工具书,并截屏): Artificial Intelligence: Constructivism: Computer Aided Instruction: 三、选择的检索工具(根据本课题可以选择哪些数据库或平台,要包括中文数据库、外文数据库、专利或发现平台、搜索引擎等)(5分) NSTL国家科技图书文献中心 EBSCO(ASC)综合学科全文数据库 Geogle搜索引擎 Bing搜索引擎 百度搜索引擎 四、制定检索式(检索式中的检索词与上述给出的检索词对应)(10分)(1)中文检索式(5分) 人工智能AND建构主义AND计算机辅助教学 (2)外文检索式(5分) Artificial Intelligence*Constructivism*Computer Aided Instruction 五、检出结果展示(15分) (1)搜索引擎检索结果截图(3分)系统结构期末考试试题及答案
控制系统数字仿真大作业.
计算机系统结构期末考试试题及其答案
通信原理大作业
计算机仿真技术与CAD习题答案
感应加热电源的控制与驱动电路
大作业题目
感应加热基本原理
高频感应加热电源工作原理
2015数学建模选修大作业
《计算机仿真技术》试题(含完整答案)
利用SG3525实现调频控制的感应加热电源
感应加热电源常见问题解读
2019-2020第2学期文检课期末大作业(1)