飞机直流供电特性测试系统畸变频谱参数校准方法

? 42 ?计量测试与校准2018年第38卷第2期doi:10. 11823/j. issn. 1674 - 5795. 2018. 02. 11
飞机直流供电特性测试系统畸变频谱参数校准方法
王文健,王建强
(航空工业北京长城计量测试技术研究所,北京100095)
摘要:通过对飞机直流供电特性测试系统校准装置的畸变频谱信号产生原理进行介绍,并依据JJF 1059. 1 -2012《测量不确定度评定与表示》对飞机直流供电特性测试系统校准装置直流电压畸变频谱进行不确定度来源分析,给出了直流电压畸变频谱不确定度的具体评价方法。最终,按照上述不确定度评价方法对飞机直流供电特性测试系统校准装置直流电压畸变频谱不确定度进行了评定。
关键词=供电特性;畸变频谱;不确定度
中图分类号:TB971 文献标识码:A文章编号:1674-5795(2018)02-0042-05
The Calibration Method of the Distortion Spectrum of Aircraft DC Power Supply Characteristic Testing System
WANGWenjian,WANG Jianqiang
(Changcheng Institute of Metrology & Measurement, Beijing 100095, China)
Abstract:In this paper, the principle of distortion spectrum signal generation of the calibration device for the aircraft DC power supply characteristic testing system is introduced. According to JJF 1059 -1999" Measurement Uncertainty Evaluation and Representation" , the uncer-tainty sources evaluation of DC voltage distortion spectrum calibration system of DC power supply characteristic calibration device were carried out, and the uncertainty evaluation method was given. Finally, according to the above - mentioned uncertainty evaluation method, the calibration uncertainty of DC voltage distortion spectrum of the DC power supply characteristic calibration device was evaluated.
Key words:power supply characteristic;distortion spectrum;uncertainty
〇引言
飞机供电系统的品质是评估飞机性能的重要指标之 一。飞机供电特性参数主要描述机载用电设备电源输人 端供电参数的品质,其中针对稳态参数、调制参数、畸 变参数、瞬态参数和非正常工作极限参数的评价,是飞 机供电质量评价工作的核心,其指标的优劣直接关系到 飞机供电系统和机载用电设备是否符合设计要求,因而 也是飞机供电特性测试系统测试的重点和关键参数。
飞机供电特性测试系统用于对供电系统的电压和 电流参数进行实时准确的记录与分析,进而对供电品 质进行评价。为保证飞机供电特性测试系统测试数据 的准确可靠,相应的校准工作必不可少。飞机供电特 性测试系统校准装置的核心是可程控的多功能高准确 度校准信号源,可实现计算机程序控制,产生并仿真 高压直流供电系统各种供电情况下的电气信号,其中 包括直流电压的畸变频谱信号。
全文详细介绍了飞机供电特性测试系统校准装置 直流电压畸变信号的产生方法,并对校准结果的不确 定度进行了评价。1畸变频谱参数校准方法
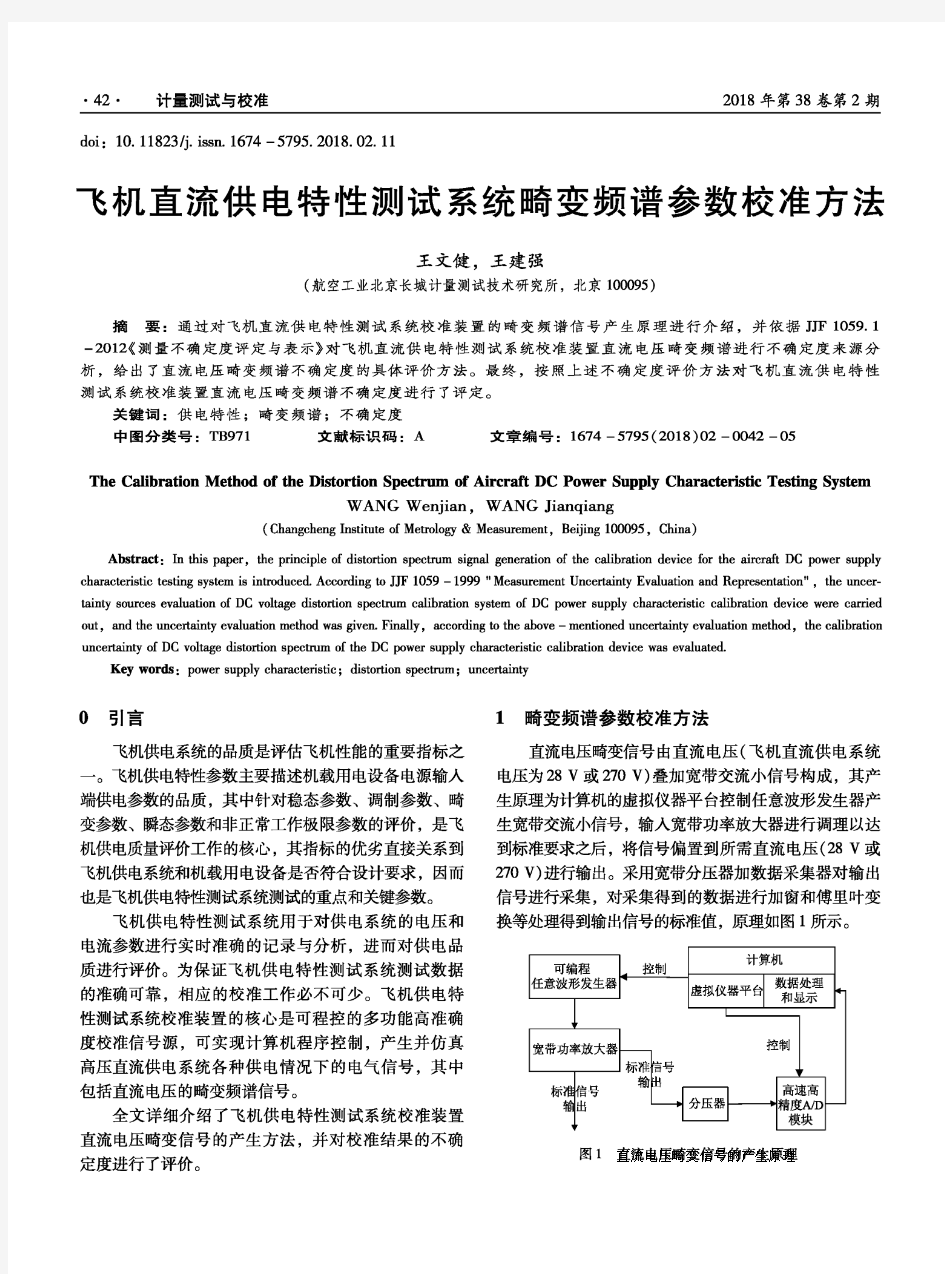
直流电压畸变信号由直流电压(飞机直流供电系统 电压为28 V或270 V)叠加宽带交流小信号构成,其产 生原理为计算机的虚拟仪器平台控制任意波形发生器产 生宽带交流小信号,输人宽带功率放大器进行调理以达 到标准要求之后,将信号偏置到所需直流电压(28 V或
270 V)进行输出。采用宽带分压器加数据采集器对输出 信号进行采集,对采集得到的数据进行加窗和傅里叶变 换等处理得到输出信号的标准值,原理如图1所示。
图1
直流电压畸变信号的产生原理
检测系统的基本特性
第2章 检测系统的基本特性 2.1 检测系统的静态特性及指标 2.1.1检测系统的静态特性 一、静态测量和静态特性 静态测量:测量过程中被测量保持恒定不变(即dx/dt=0系统处于稳定状态)时的测量。 静态特性(标度特性):在静态测量中,检测系统的输出-输入特性。 n n x a x a x a x a a y +++++= 332210 例如:理想的线性检测系统: x a y 1= 如图2-1-1(a)所示 带有零位值的线性检测系统:x a a y 10+= 如图2-1-1(b)所示 二、静态特性的校准(标定)条件――静态标准条件。 2.1.2检测系统的静态性能指标 一、测量范围和量程 1、 测量范围:(x min ,x max ) x min ――检测系统所能测量到的最小被测输入量(下限) x max ――检测系统所能测量到的最大被测输入量(上限)。 2、量程: min max x x L -= 二、灵敏度S dx dy x y S x =??=→?)( lim 0 串接系统的总灵敏度为各组成环节灵敏度的连乘积 321S S S S = 三、分辨力与分辨率 1、分辨力:能引起输出量发生变化时输入量的最小变化量min x ?。 2、分辨率:全量程中最大的min x ?即min max x ?与满量程L 之比的百分数。 四、精度(见第三章) 五、线性度e L max .. 100%L L F S e y ?=± ? max L ?――检测系统实际测得的输出-输入特性曲线(称为标定曲线)与其拟合直线之
间的最大偏差 ..S F y ――满量程(F.S.)输出 注意:线性度和直线拟合方法有关。 最常用的求解拟合直线的方法:端点法 最小二乘法 图2-1-3线性度 a.端基线性度; b.最小二乘线性度 四、迟滞e H %100. .max ??= S F H y H e 回程误差――检测系统的输入量由小增大(正行程),继而自大减小(反行程)的测试 过程中,对应于同一输入量,输出量的差值。 ΔHmax ――输出值在正反行程的最大差值即回程误差最大值。 迟滞特性 五、稳定性与漂移 稳定性:在一定工作条件下,保持输入信号不变时,输出信号随时间或温度的变化而出 现缓慢变化的程度。 时漂: 在输入信号不变的情况下,检测系统的输出随着时间变化的现象。 温漂: 随着环境温度变化的现象(通常包括零位温漂、灵敏度温漂)。 2.2 检测系统的动态特性及指标 动态测量:测量过程中被测量随时间变化时的测量。 动态特性――检测系统动态测量时的输出-输入特性。 常用实验的方法: 频率响应分析法――以正弦信号作为系统的输入;
测试系统静态特性校准实验报告
实验一测试系统静态特性校准 一.实验目的 1.1 掌握压力传感器的原理 1.2掌握压力测量系统的组成 1.3掌握压力传感器静态校准实验和静态校准数据处理的一般方法 二.实验设备 本实验系统由活塞式压力计,硅压阻式压力传感器,信号调理电路,5位半数字电压表,直流稳压电源和采样电阻组成。图1-1实验系统方框图如下: 实验设备型号及精度 三.实验原理 在实验中,活塞式压力计作为基准器,为压力传感器提供标准压力0~0.6%Mpa信号调理器为压力传感器提供恒电源,将压力传感器输出的电压信号放大并转换为电流信号。信号处理器输出为二线制,4~20mA信号电源在250 采样电阻上转换为1~5V电压信号,由5位半数字电压表读出。
四.实验操作 4.1操作步骤 (1)用调整螺钉和水平仪将活塞压力计调至水平。 (2)核对砝码重量及个数,注意轻拿轻放。 (3)将活塞压力计的油杯针阀打开,逆时针转动手轮向手摇泵内抽油,抽满后,将油杯针阀关闭。严禁未开油杯针阀时,用手轮抽油,以防破坏传感器。 (4)加载砝码至满量程,转动手轮使测量杆标记对齐,再卸压。反复1-2次,以消除压力传感器内部的迟滞。 (5)卸压后,重复(3)并在油杯关闭前记录传感器的零点输出电压,记为正行程零点。 (6)按0.05Mpa的间隔,逐级给传感器加载至满量程,每加载一次,转动手轮使测量杆上的标记对齐,在电压表上读出每次加载的电压值。 (7)加压至满量程后,用手指轻轻按一下砝码中心点,施加一小扰动,稍后记录该电压值,记为反行程的满量程值。此后逐级卸载,并在电压表读出相应的电压值。 (8)卸载完毕,将油杯针阀打开,记录反行程零点,一次循环测量结束。 (9)稍停1~2分钟,开始第二次循环,从(5)开始操作,共进行5次循环。 4.2 注意事项 保持砝码干燥,轻拿轻放,防止摔碰。 轻旋手轮和针阀,防止用力过猛。 正、反行程中,要求保证压力的单调性,如遇压力不足或压力超值,应重新进行循环。 当活塞压力计测量系统的活塞升起是,请注意杆的标记线与两侧固定支架上的标记对齐,同时,用手轻轻旋动托盘,以保持约30转/分的旋转速度,用此消除静摩擦,此后方可进行读数。 严禁未开油杯针阀时,用手轮抽油,以防破坏传感器;或在电压表输出值不变的情况下,严禁连续转动手轮数圈。 五.数据处理 1、实验数据
测试系统的特性
第4章测试系统的特性 一般测试系统由传感器、中间变换装置和显示记录装置三部分组成。测试过程中传感器将反映被测对象特性的物理量(如压力、加速度、温度等)检出并转换为电信号,然后传输给中间变换装置;中间变换装置对电信号用硬件电路进行处理或经A/D变成数字量,再将结果以电信号或数字信号的方式传输给显示记录装置;最后由显示记录装置将测量结果显示出来,提供给观察者或其它自动控制装置。测试系统见图4-1所示。 根据测试任务复杂程度的不同,测试系统中每个环节又可由多个模块组成。例如,图4-2所示的机床轴承故障监测系统中的中间变换装置就由带通滤波器、A/D变换器和快速傅里叶变换(Fast Fourier Transform,简称FFT)分析软件三部分组成。测试系统中传感器为振动加速度计,它将机床轴承振动信号转换为电信号;带通滤波器用于滤除传感器测量信号中的高、低频干扰信号和对信号进行放大,A/D变换器用于对放大后的测量信号进行采样,将其转换为数字量;FFT分析软件则对转换后的数字信号进行快速傅里叶变换,计算出信号的频谱;最后由计算机显示器对频谱进行显示。 要实现测试,一个测试系统必须可靠、不失真。因此,本章将讨论测试系统及其输入、输出的关系,以及测试系统不失真的条件。 图4-1 测试系统简图 图4-2 轴承振动信号的测试系统
4.1 线性系统及其基本性质 机械测试的实质是研究被测机械的信号)(t x (激励)、测试系统的特性)(t h 和测试结果)(t y (响应)三者之间的关系,可用图4-3表示。 )(t x )(t y )(t h 图4-3 测试系统与输入和输出的关系 它有三个方面的含义: (1)如果输入)(t x 和输出)(t y 可测,则可以推断测试系统的特性)(t h ; (2)如果测试系统特性)(t h 已知,输出)(t y 可测,则可以推导出相应的输入)(t x ; (3)如果输入)(t x 和系统特性)(t h 已知,则可以推断或估计系统的输出)(t y 。 这里所说的测试系统,广义上是指从设备的某一激励输入(输入环节)到检测输出量的那个环节(输出环节)之间的整个系统,一般包括被测设备和测量装置两部分。所以只有首先确知测量装置的特性,才能从测量结果中正确评价被测设备的特性或运行状态。 理想的测试装置应具有单值的、确定的输入/输出关系,并且最好为线性关系。由于在静态测量中校正和补偿技术易于实现,这种线性关系不是必须的(但是希望的);而在动态测量中,测试装置则应力求是线性系统,原因主要有两方面:一是目前对线性系统的数学处理和分析方法比较完善;二是动态测量中的非线性校正比较困难。但对许多实际的机械信号测试装置而言,不可能在很大的工作范围内全部保持线性,只能在一定的工作范围和误差允许范围内当作线性系统来处理。 线性系统输入)(t x 和输出)(t y 之间的关系可以用式(4-1)来描述 )()(...)()()()(...)()(0111101111t x b dt t dx b dt t x d b dt t x d b t y a dt t dy a dt t y d a dt t y d a m m m m m m n n n n n n ++++=++++------ (4-1) 当n a ,1-n a ,…,0a 和m b ,1-m b ,…,0b 均为常数时,式(4-1)描述的就是线性系统,也称为时不变线性系统,它有以下主要基本性质: (1)叠加性 若 )()(11t y t x →,)()(22t y t x →,则有
测试系统的特性 2
测试系统的特性 填空题 1.用一阶系统作测量装置,为了获得最佳的工作性能,其时间常数τ原则上(越小越好)。 2.(时间常数)是一阶系统的动态特性参数。 3.线性度表示标定曲线(偏离其拟合曲线)的程度。 4.若线性系统的输入为某一频率的简谐信号,则其稳态响应必为(同一频率)的简谐信号。 5.(漂移)是在输入不变的条件下,测量系统的输出随时间变化的现象。 6.关于标定曲线不重合的测量系统静态特性有(滞后)和(重复性)。 7.测试装置在稳态下,单位输入变化所引起的输出变化称为该装置的(灵敏度);能够引起输出量可测量变化的最小输入量称为该装置的(分辨力)。 8.相频特性是指(输出较输入滞后角随输入频率)变化的特性。 9.二阶测试装置,其阻尼比ζ为(0.7)左右时,可以获得较好的综合特性。 10.测量系统输出信号的傅里叶变换与输入信号的傅里叶变换之比称为(频率响应函数)。 11.测量系统对单位脉冲输入的响应称为(脉冲响应函数)。 12.测试装置的频率响应函数H(j ω)是装置动态特性的(频)域描述。 简答题 1.说明线性系统的频率保持性在测量中的作用。 在实际测试中,测得的信号常常会受到其他信号或噪声的干扰,依据频率保持性可以认定,测得信号中只有与输入信号相同的频率成分才是真正由输入引起的输出。 在故障诊断中,对于测试信号的主要频率成分,根据频率保持性可知,该频率成分是由相同频率的振动源引起的,找到产生该频率成分的原因,就可以诊断出故障的原因。 2.测试系统不失真测试的条件是什么? 在时域,测试系统的输出y(t)与输入x(t)应满足)()(00t t x A t y -=。在频域,幅频特性曲线是一条平行于频率ω轴的直线,即幅频特性为常数,0)(A A =ω,相频特性曲线是线性曲线ωω?0t -=)(,式中,00,t A 均为常数。 3.在磁电指示机构中,为什么取0.7为最佳阻尼比? 磁电指示机构是二阶系统。当阻尼比取0.7时,从幅频特性的角度,在一定误差范围内,工作频率范围比较宽。从相频特性的角度,特性曲线近似于线性,这样可以在较宽的频率实现不失真测试。 4.对一个测量装置,已知正弦输入信号的频率,如何确定测量结果的幅值和相位的动态误差? 首先确定装置的频率响应函数,得出幅频特性A(ω)和相频特性)(ω?。然后,把输入信号的频率分别代入)0(/)(A A ω和)(ω?,分别得到输出与输入的动态幅
声速的测量实验报告.doc
声速的测量实验报告 不会写声速的测量实验报告的朋友,下面请看我给大家整理收集的声速的测量实验报告,仅供参考。 声速的测量实验报告1 实验目的:测量声音在空气中的传播速度。 实验器材:温度计、卷尺、秒表。 实验地点:平遥县状元桥东。 实验人员:爱物学理小组 实验分工:张灏、成立敬——测量时间 张海涛——发声 贾兴藩——测温 实验过程: 1 测量一段开阔地长; 2 测量人在两端准备; 3 计时员挥手致意,发声人准备发声; 4 发生人向上举手,同时发声,计时员计时(看到举手始,听到声音止) 5 多测几次,记录数据。 实验结果: 时间17∶30 温度21℃
发声时间 0.26″ 发声距离 93m 实验结论:在21℃空气中,声音传播速度为357.69m/s. 实验反思:有一定误差,卡表不够准确。 声速的测量实验报告2 实验目的: 1)探究影响声速的因素,超声波产生和接收的原理。 2)学习、掌握空气中声速的测量方法 3)了解、实践液体、固体中的声速测量方法。 4)三种声速测量方法作初步的比较研究。 实验仪器: 1)超声波发射器 2)超声波探测器 3)平移与位置显示部件。 4)信号发生器: 5)示波器 实验原理: 1)空气中: a.在理想气体中声波的传播速度为 v88 (式中8088cp cV (1) 称为质量热容比,也称"比热[容]比",它是气体的质 量定压热容cp与质量定容热容cV的比值;M 是气体的摩尔质量,T 是绝对温度,R=8.314472(1±1.7×10-6)Jmol-1K-1为摩尔气体常量。)
标准干燥空气的平均摩尔质量为Mst =28.966�8�710-3kg/mol b.在标准状态下 (T0�8�8273.15 K,p�8�8101.3�8�8kPa),干燥空气中的声速 为v0=331.5m/s。在室温t℃下,干燥空气中的声速为 v88v0 (2) (T0=273.15K) c.然而实际空气总会有一些水蒸气。当空气中的相对湿度为r时,若气温为t℃时饱和蒸气压为pS,则水汽分压为rps。经过对空气平均摩尔质量 M 和质量热容比8�0 的修正,在温度为t、相对湿度为r 的空气中,声速为 (在北京大气压可近似取p�8�4 101kPa;相对湿度r 可从干湿温度计上读出。温度t℃时的饱和水汽压ps可用 lgps�8�810.286�8�2 d.式(3)的计算结果与实际的超声声速真值可能有一定偏差。 引起偏差的原因有: ~状态参量的测量误差 ~理想气体理论公式的近似性 实验方法: A. 脉冲法:利用声波传播时间与传播距离计算声速 实验中用脉冲法测量,具体测量从脉冲声源(声发射器)到声探测器
检测系统的静态特性和动态特性
检测系统的静态特性和动态特性 检测系统的基本特性一般分为两类:静态特性和动态特性。这是因为被测参量的变化大致可分为两种情况,一种是被测参量基本不变或变化很缓慢的情况,即所谓“准静态量”。此时,可用检测系统的一系列静态参数(静态特性)来对这类“准静态量”的测量结果进行表示、分析和处理。另一种是被测参量变化很快的情况,它必然要求检测系统的响应更为迅速,此时,应用检测系统的一系列动态参数(动态特性)来对这类“动态量”测量结果进行表示、分析和处理。 研究和分析检测系统的基本特性,主要有以下三个方面的用途。 第一,通过检测系统的已知基本特性,由测量结果推知被测参量的准确值;这也是检测系统对被测参量进行通常的测量过程。 第二,对多环节构成的较复杂的检测系统进行测量结果及(综合)不确定度的分析,即根据该检测系统各组成环节的已知基本特性,按照已知输入信号的流向,逐级推断和分析各环节输出信号及其不确定度。 第三,根据测量得到的(输出)结果和已知输入信号,推断和分析出检测系统的基本特性。这主要用于该检测系统
的设计、研制和改进、优化,以及对无法获得更好性能的同类检测系统和未完全达到所需测量精度的重要检测项目进行深入分析、研究。 通常把被测参量作为检测系统的输入(亦称为激励)信号,而把检测系统的输出信号称为响应。由此,我们就可以把整个检测系统看成一个信息通道来进行分析。理想的信息通道应能不失真地传输各种激励信号。通过对检测系统在各种激励信号下的响应的分析,可以推断、评价该检测系统的基本特性与主要技术指标。 一般情况下,检测系统的静态特性与动态特性是相互关联的,检测系统的静态特性也会影响到动态条件下的测量。但为叙述方便和使问题简化,便于分析讨论,通常把静态特性与动态特性分开讨论,把造成动态误差的非线性因素作为静态特性处理,而在列运动方程时,忽略非线性因素,简化为线性微分方程。这样可使许多非常复杂的非线性工程测量问题大大简化,虽然会因此而增加一定的误差,但是绝大多数情况下此项误差与测量结果中含有的其他误差相比都是可以忽略的。
简支梁振动系统动态特性综合测试方法分析
目录 一、设计题目 (1) 二、设计任务 (1) 三、所需器材 (1) 四、动态特性测量 (1) 1.振动系统固有频率的测量 (1) 2.测量并验证位移、速度、加速度之间的关系 (3) 3.系统强迫振动固有频率和阻尼的测量 (6) 4.系统自由衰减振动及固有频率和阻尼比的测量 (6) 5.主动隔振的测量 (9) 6.被动隔振的测量 (13) 7.复式动力吸振器吸振实验 (18) 五、心得体会 (21) 六、参考文献 (21)
一、设计题目 简支梁振动系统动态特性综合测试方法。 二、设计任务 1.振动系统固有频率的测量。 2.测量并验证位移、速度、加速度之间的关系。 3.系统强迫振动固有频率和阻尼的测量。 4.系统自由衰减振动及固有频率和阻尼比的测量。 5.主动隔振的测量。 6.被动隔振的测量。 7.复式动力吸振器吸振实验。 三、所需器材 振动实验台、激振器、加速度传感器、速度传感器、位移传感器、力传感器、扫描信号源、动态分析仪、力锤、质量块、可调速电机、空气阻尼器、复式吸振器。 四、动态特性测量 1.振动系统固有频率的测量 (1)实验装置框图:见(图1-1) (2)实验原理: 对于振动系统测定其固有频率,常用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过振动曲线,我们可以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有
频率。 (图1-1实验装置图) (3)实验方法: ①安装仪器 把接触式激振器安装在支架上,调节激振器高度,让接触头对简支梁产生一定的预压力,使激振杆上的红线与激振器端面平齐为宜,把激振器的信号输入端用连接线接到DH1301扫频信号源的输出接口上。把加速度传感器粘贴在简支梁上,输出信号接到数采分析仪的振动测试通道。 ②开机 打开仪器电源,进入DAS2003数采分析软件,设置采样率,连续采集,输入传感器灵敏度、设置量程范围,在打开的窗口内选择接入信号的测量通道。清零后开始采集数据。 ③测量 打开DH1301扫频信号源的电源开关,调节输出电压,注意不要过载,手动调节输出信号的频率,从0开始调节,当简支梁产生振动,且振动量最大时(共振),保持该频率一段时间,记录下此时信号源显示的频率,即为简支梁振动固有频率。继续增大频率可得到高阶振动频率。
最新四年级上册科学实验报告单(声音是怎样产生的)
清镇市中小学实验报告单 实验科目:科学 真题:您是市政府的工作人员,需要调查大学生村官的工作情况,面对基层群众(农民)、基层工作人员分别作一个开场白。
【题型分析】情景模拟 【参考答案】 1.面对基层群众(农民):大叔大婶,你们好!我是咱们市政府的小王。眼看着一年又快到头了,今年的天儿不错,家里收成还好吧?……听说咱们这儿来了些大学生,到咱这儿当村官,不知道干的咋样啊?…… 2.面对基层工作人员:XX,你好!我是市政府的工作人员王XX(同时出示工作证),这次来到这里,主要是想调查一下大学生村官的工作情况,希望得到你们的配合和协助。你们长期在基层工作,比较辛苦,对于大学生们在村里的工作情况也比较了解。知道你工作很忙,所以我会尽量抓紧时间…… 真题:金无足赤,人无完人,您有什么缺点和不足?假如您被录用,您将怎么克服您的缺点和不足? 【题型分析】认识自己 【参考答案】每一个人都有自己的缺点和不足,我也一样。我认为我的缺点是有时候有点追求完美,这样一来有可能会拖慢办事的效率,偶尔也会给合作伙伴带来压力。有缺点和不足并不可怕,重要的是能够改正缺点,弥补不足。我将从以下几个方面加强学习,进行改正。 第一,摆正心态正确认识。在遇到每一项工作的时候,我都应该准确地把握工作实质、明确目标,在思想上做好充分准备。不能因为自己的喜好而偏离工作应有的方向和要求。 第二,制定工作计划表。在开始每一项工作的时候,我都要制定好详细的工作进度控制表,将每个阶段的工作目标、内容以及时间详细列好。在开展工作的时候严格按照计划表进行,以免拖慢工作的进程。借此来养成好的工作习惯,以提高办事效率。 第三,加强与同事合作。每一项工作都不可能是自己独立一个人能够做好的,都是需要和同事一起合作才能将其做到真正的完美。这就要求我要在以后的工作中,多多与同事交流,虚心向同事学习。 假如有幸我能够通过此次考试,在以后的工作岗位上,我将严格要求自己,加强学习,发扬优点,改正缺点,竭尽所能做好领导交办的每一项任务,做一名合格的公务员。 真题:您作为单位的新进工作人员,领导让您制定一份单位的规章制度,您对单位不熟悉,您将怎么办? 【题型分析】如何做事 【参考答案】俗话说:“无规矩不成方圆”,好的规章制度能够在保证单位良好工作秩序方面发挥积极的作用。领导将这项任务交予我完成,我一定会努力做好,我将从以下几个方面入手,开展此项工作。 首先,我要请示领导,明白领导制定此规章制度的宗旨和意图。鉴于我作为新进员工对工作单位还不熟悉,我会向同事进行询问,翻查单位档案,加深对单位的人员环境、工作环境的了解。另外,要广泛收集单位同事的意见。我将采取问卷调查的方式进行意见收集,可以使用相关软件来对收回的有效问卷进行信息处理和分析,切实了解员工的意见。此外我还要刻苦学习相关管理学知识,了解国家相关法律法规,为制定一份合理的单位规章制度做好充分的理论准备。 其次,在书写规章制度时,要遵守国家法律法规的规定,制定出合法有效的规章制度。与此同时,我还要根据之前所整理的员工意见,兼顾单位的实际情况,制定一份合乎人情的规章制度。在规章制度雏形完成之后,还要让单位同事对此发表自己的意见,在充分了解意见之后对其进行反复修改。与此同时,规章制度还要做到简洁凝练,通俗易懂。在修订好初
简述系统动态特性及其测定方法
简述系统动态特性及其测定方法 系统的特性可分为静态特性和动态特性。其中动态特性是指检测系统在被测量随时间变化的条件下输入输出关系。一般地,在所考虑的测量范围内,测试系统都可以认为是线性系统,因此就可以用一定常线性系统微分方程来描述测试系统以及和输入x (t)、输出y (t)之间的关系。 1) 微分方程:根据相应的物理定律(如牛顿定律、能量守恒定律、基尔霍夫电 路定律等),用线性常系数微分方程表示系统的输入x 与输出y 关系的数字方程式。 a i 、 b i (i=0,1,…):系统结构特性参数,常数,系统的阶次由输出量最高微分阶次决定。 2) 通过拉普拉斯变换建立其相应的“传递函数”,该传递函数就能描述测试装 置的固有动态特性,通过傅里叶变换建立其相应的“频率响应函数”,以此来描述测试系统的特性。 定义系统传递函数H(S)为输出量与输入量的拉普拉斯变换之比,即 式中S 为复变量,即ωαj s += 传递函数是一种对系统特性的解析描述。它包含了瞬态、稳态时间响应和频率响应的全部信息。传递函数有一下几个特点: (1)H(s)描述系统本身的动态特性,而与输入量x (t)及系统的初始状态无关。 (2)H(S)是对物理系统特性的一种数学描述,而与系统的具体物理结构无关。H(S)是通过对实际的物理系统抽象成数学模型后,经过拉普拉斯变换后所得出的,所以同一传递函数可以表征具有相同传输特性的不同物理系统。 (3)H(S)中的分母取决于系统的结构,而分子则表示系统同外界之间的联系,如输入点的位置、输入方式、被测量以及测点布置情况等。分母中s 的幂次n 代表系统微分方程的阶数,如当n =1或n =2 时,分别称为一阶系统或二阶系统。 一般测试系统都是稳定系统,其分母中s 的幂次总是高于分子中s 的幂次(n>m)。
实验二-二阶系统的动态特性与稳定性分析
实验二-二阶系统的动态特性与稳定性分析
自动控制原理 实验报告 实验名称:二阶系统的动态特性与稳定性分析班级: 姓名: 学号:
实验二二阶系统的动态特性与稳定性分析 一、实验目的 1、掌握二阶系统的电路模拟方法及其动态性能指标的测试技术过阻尼、临界阻尼、欠阻尼状态 )对系统动态2、分析二阶系统特征参量(ξ ω, n 性能的影响; 3、分析系统参数变化对系统稳定性的影响,加深理解“线性系统稳定性至于其结构和参数有关,与外作用无关”的性质; 4、了解掌握典型三阶系统的稳定状态、临界稳定、不稳定状态; 5、学习二阶控制系统及其阶跃响应的Matlab 仿真和simulink实现方法。 二、实验内容 1、构成各二阶控制系统模拟电路,计算传递函数,明确各参数物理意义。 2、用Matlab和simulink仿真,分析其阶跃响应动态性能,得出性能指标。 3、搭建典型二阶系统,观测各个参数下的阶跃响应曲线,并记录阶跃响应曲线的超调量%σ、
峰值时间tp 以及调节时间ts ,研究其参数变化对典型二阶系统动态性能和稳定性的影响; 4、 搭建典型三阶系统,观测各个参数下的阶跃响应曲线,并记录阶跃响应曲线的超调量%σ、峰值时间tp 以及调节时间ts ,研究其参数变化对典型三阶系统动态性能和稳定性的影响; 5、 将软件仿真结果与模拟电路观测的结果做比较。 三、实验步骤 1、 二阶系统的模拟电路实现原理 将二阶系统: ωωξω2 2)(22 n n s G s s n ++= 可分解为一个比例环节,一个惯性环节和一个积分环节 ωωξω221)() ()()(2C C C C s C C 2 22 6215423 2 15423 2 2154215426316 320 n n s s s s s G s s s C R R R R R R R R R R R R C R R R R R R R R R U U n i ++= ++=++== 2、 研究特征参量ξ对二阶系统性能的影响 将二阶系统固有频率5 .12n =ω 保持不变,测试阻尼
实验四声音传感器实验
信息工程学院实验报告 课程名称: 传感器原理及应用 实验项目名称: 实验四 声音传感器实验 实验时间: 班级: 姓名: 学号: 一、实 验 目 的 1. 学习 CC2530 单片机 GPIO 的使用。 2. 学习声音传感器的使用 二、实 验 原 理 1. CC2530 节点与三轴加速度传感器的硬件接口
(1). 声音传感器模块(MIC)引脚 GND:外接GND DO:数字量输出接口(0 和1) +5V:外接5V 电源 (2). 传感器模块与CC2530 模块之间的连接 2. GPIO (1). 简介 CC2530单片机具有21个数字输入/输出引脚,可以配置为通用数字I/O或外设I/O信号,配置为连接到ADC、定时器或USART外设。这些I/O口的用途可以通过一系列寄存器配置,由用户软件加以实现。 I/O端口具备如下特性: ●21个数字I/O引脚 ●可以配置为通用I/O或外部设备I/O ●输入口具备上拉或下拉能力 ●具有外部中断能力。 这21个I/O引脚都可以用作于外部中断源输入口。因此如果需要外部设备可以产生中断。外部中断功能也可以从睡眠模式唤醒设备。 (2). 寄存器简介 本次实验中主要涉及到GPIO的寄存器如下:
3. MIC 声音传感器 (1). 概述 声音传感器的作用相当于一个话筒(麦克风)。它用来接收声波,显示声音的振动图象。但不能对噪声的强度进行测量。 该传感器内置一个对声音敏感的电容式驻极体话筒。声波使话筒内的驻极体薄膜振动,导致电容的变化,而产生与之对应变化的微小电压。这一电压随后被转化成0-5V 的电压,经过比较器转换数字信号后,被数据采集器接受,并传送给计算机。 传感器特点: ●具有信号输出指示。 ●输出有效信号为低电平。 ●当有声音时输出低电平,信号灯亮。 应用范围: ●可以用于声控灯,配合光敏传感器做声光报警,以及声音控制,声音检测的场合。 (2). 使用方法 本实验利用CC2530 的GPIO 读取声音传感器模块的检测结果输出端,当检测到一定的声音时,此输出端为低电平;未检测到一定的声音时,此输出端为高电平。因此在实际应用中可以根据这种情况判断是否有声音在传感器附近产生。 4.程序流程
第4章测试系统的基本特性解析
第4章测试系统的基本特性 4.1 知识要点 4.1.1测试系统概述及其主要性质 1.什么叫线性时不变系统? 设系统的输入为x (t )、输出为y (t ),则高阶线性测量系统可用高阶、齐次、常系数微分方程来描述: )(d )(d d )(d d )(d 01111t y a t t y a t t y a t t y a n n n n n n ++++--- )(d )(d d )(d d )(d 01111t x b t t x b t t x b t t x b m m m m m m ++++=--- (4-1) 式(4-1)中,a n 、a n -1、…、a 0和b m 、b m -1、…、b 0是常数,与测量系统的结构特性、输入状况和测试点的分布等因素有关。这种系统其内部参数不随时间变化而变化,称之为时不变(或称定常)系统。既是线性的又是时不变的系统叫做线性时不变系统。 2.线性时不变系统具有哪些主要性质? (1)叠加性与比例性:系统对各输入之和的输出等于各单个输入的输出之和。 (2)微分性质:系统对输入微分的响应,等同于对原输入响应的微分。 (3)积分性质:当初始条件为零时,系统对输入积分的响应等同于对原输入响应的积分。 (4)频率不变性:若系统的输入为某一频率的谐波信号,则系统的稳态输出将为同一频率的谐波信号。 4.1.2测试系统的静态特性 1.什么叫标定和静态标定?采用什么方法进行静态标定?标定有何作用?标定的步骤有哪些? 标定:用已知的标准校正仪器或测量系统的过程。 静态标定:就是将原始基准器,或比被标定系统准确度高的各级标准器或已知输入源作用于测量系统,得出测量系统的激励-响应关系的实验操作。 静态标定方法:在全量程范围内均匀地取定5个或5个以上的标定点(包括零点),从零点开始,由低至高,逐次输入预定的标定值(称标定的正行程),然后再倒序由高至低依次输入预定的标定值,直至返回零点(称标定的反行程),并按要求将以上操作重复若干次,记录下相应的响应-激励关系。 标定的主要作用是:确定仪器或测量系统的输入-输出关系,赋予仪器或测量系统分度
苏教版小学科学四年级声音的产生教学设计
《声音的产生》教学案 【学习目标】 过程与方法: 1、观察、比较发声物体时的状态,并对这一现象进行积极思考,经历感觉声音、制造声音、探究声音产生原因的过程。 2、在观察、描述的活动中,积极思考交流。 知识与技能: 3、会动手制造声音、对发声物体进行观察,知道磨擦、弹拨、敲击、吹气等可使物体产生振动而发出声音。 情感、态度与价值观: △养成在实验过程中既动手又动脑的好习惯。 △学会与人合作,学会交流与倾听。 △养成尊重事实的科学态度。 【重点难点】 教学重点:通过观察、比较、讨论、交流等活动,认识声音是由振动产生的,并能从体验中归纳总结出结论。 教学难点:通过观察、比较引发思考,并积极地探究、将声音的产生与物体振动建立起联系。 【课前准备】 实验记录单、实验报告单、保鲜袋、尺子、小军队鼓(米粒、鼓槌)、音钹。 【教学活动】 一、创设情境、提出问题
师:同学们,刚才我们听到了什么?(铃声)铃声是上、下课的什么(信号),答得很好,请给他掌声,那掌声代表一种什么呢?(鼓励)。 二、课前活动、激发兴趣 同学们,想做游戏吗,我们一起来做一个“猜猜我是谁”,抽一位学生到讲台来,蒙上他的眼睛,叫六个同学叫他猜出六位同学的名字。你是怎么猜出来的,好了,就让我们一起来走进这声音的神秘世界吧,这节课就让我们共同来探究声音是怎样产生的?板书课题:声音的产生 三、制造声音、观察现象 师:请同学们拿出保鲜袋。试着用不同的方法,让它发出声音来?同学们做得真好! (学生实验,请学生把方法演示出来) 师:同学们用了许多的方法让保鲜袋发出了声音。那么,我们现在不借助其他任何物体,只利用自己的身体。你能用多少种方法让身体发出声音来? (学生思考,请学生演示方法)好,同学们都能动脑思考,积极回答问题。 1、通过实验作出猜想 师:那么同学们,我们用了许多方法让保鲜袋、身体等这些物体发出了声音。 问:那么声音究竟是怎么产生的呢? 师:请同学们作出你的猜想,并把你的猜想写下来,写在记录本上。 师:好,同学们都作出了自己的猜想,那么你们的猜想对不对呢?下面我们就通过实验去探究。 2、介绍实验材料,讨论发声方法 师:同学们请看,老师准备了一些材料。都有什么?出示(格尺、鼓、米粒、瓶子、盐、音钹)你能想办法让它们发出声音吗?(分组实验、谈论) 师:实验时注意,制造声音时不易用力过猛,损坏器材,还要控制好声音的大小。
第3章测试系统的动态特性与数据处理
信号与测试技术
第3章 测试系统的动态特性与数据处理 北航 自动化科学与电气工程学院 检测技术与自动化工程系 闫 蓓
yanbei@https://www.360docs.net/doc/b815604084.html,
第3章 学习要求
1、测试系统动态特性的定义及描述方法 2、如何获取测试系统的动态特性 3、掌握主要动态性能指标 时域指标、频域指标 4、掌握动态模型的建立(动态标定) 由阶跃响应获取传递函数的回归分析法 由频率特性获取传递函数的回归分析法
2014/3/14
信号与测试技术
2
第3章 测试系统的动态特性与数据处理 3.1 3.2 3.3 3.4 3.5 测试系统的动态特性的一般描述 测试系统时域动态性能指标与回归分析方法 测试系统频域动态性能指标与回归分析方法 测试系统不失真测试条件 测试系统负载效应及抗干扰特性
第3章小结 第3章作业
2014/3/14
信号与测试技术
3
3.1 测试系统的动态特性的一般描述 1. 动态特性的定义 测试系统进行动态测量过程中的特性。 输入量和输出量随时间迅速变化时,输出与输入之 间的关系,可用微分方程表示。
y (t ) 误差 e(t ) = ? x (t ) A
瞬态误差 稳态误差 时域特性 频域特性
2014/3/14
温 度 测 量
阶跃 冲激 正弦 一阶系统 二阶系统
心电参数测量
信号与测试技术
G (ω ) ? (ω )
振动位移测量
4
3.1 测试系统的动态特性的一般描述 2. 测试系统的动态特性方程 n 微分方程 传递函数 频响函数 状态方程 一阶系统 二阶系统
2014/3/14
x(t ) ? y (t )
X ( s) ? Y ( s)
d i y (t ) m d j x(t ) = ∑ bj ai ∑ i j d t d t i =0 j =0
1 1 G( s) = G( s) = 2 2 s 2 s + + ζ ω ω n n n Ts + 1
X ( jω ) ? Y ( jω ) G ( jω ) = Y ( jω ) = 输出傅立叶变换
X ( jω )
输入傅立叶变换
X = AX + BU
时域特性 频域特性
y (t ) = L?1 [G ( s ) X ( s ) ]
G ( jω ) ? ( jω )
信号与测试技术 5
测试实验二测试系统动态特性校准
实验二测试系统动态特性校准 1.1 实验目的 (1)掌握振动加速度测试系统的组成 (2)掌握振动压电、压阻加速度传感器原理和测量方法 (3)掌握振动传感器比较法动态特性校准的实验方法 (4)掌握数据处理的一般方法 1.2 实验系统基本组成 本实验系统由振动控制系统和远程数据采集、处理系统两部分组成。振动控制系统中的振动台产生动态校准、动态测试所需的振动信号。振动控制系统由振动控制仪、功率放大器、振动台和反馈传感器构成,目的是使振动台按照预先设定的参考谱进行振动。标准传感器和被校传感器感受相同的振动,经过相应的变送器或放大器的输出电压信号送入数据采集系统,经服务器发送到学生实验客户端进行后续的动态校准与分析。如图1所示 主要实验设备及性能 压阻放大器
系统灵敏度S=KEs=K×0.328mv/g=2500×K1/500g=…mv/g SLM振动加速度变送器输入输出关系式0.25v/g 图1 图2 1.3 实验原理 实验以压阻式加速度传感器为校准对象,在振动台的家具台商采用背靠背的方式安装标准传感器与被校准传感器,这样保证了他们感受的是相同的振动信号,通过采集两个传感器的输出并将其送到学生实验客户端,通过比较不同的频率下的两个信号的幅值,用标准信号的灵敏度来计算出被校传感器的灵敏度,通过与理论制作比较来得到校准的结果。 1.4 实验操作 1.操作步骤 (1)固定好传感器,连接好相应的仪器与设备。 (2)打开振动台工控机与功率放大器的电源。功率放大器的启动方法如下:1.按下去电源A按钮,这时电源B上的OFF按钮上的灯亮。2.约等数秒后,按下电源B的ON开关,这时只有ON上的灯亮。3.预热约3-5分钟。 (3)打开电荷放大器和变动期的开关,点击工控机桌面的vibration test.exe 图标,选择正弦扫频振动实验。 (4)旋转增益旋钮约至60%,运行自检。 (5)待系统提示自检成功,点击运行开始运行实验,按照本实验要求进行采集数据。 (6)采集完毕后,先将功率放大器的增益旋钮旋至复位,关闭各个软件。功率放大器的关闭方式如下:1.将输出方式站换到低阻 2.按下电源B的OFF按钮,此时ON上指示灯灭,OFF指示灯亮。 3.约等十多秒后按下A按钮,此时只有风扇转动,可能会有短暂的声音,这是正常的。 (7)关断外部供电,实验完毕。 2 注意事项 (1)当由于电源干扰等原因引起的失控或计算机死机发生时,应按如下方式进行:
03 活塞压力计静态校准实验指导书(2015)
测试系统静态特性校准实验?
1、 实验目的 1.1 掌握压力传感器的原理 1.2 掌握压力测量系统的组成 1.3 掌握压力传感器静态校准实验和静态校准数据处理的一般方法 2、 实验设备 本实验系统由活塞式压力计, 硅压阻式压力传感器, 信号调理电路, 4 位半数字电压表, 直流稳压电源盒采样电阻组成。图 1 活塞压力计照片,图 2 为活塞压力计的结构说明,图 3 为实验系统方框图,图 4 为实验电路接线图。
图 1 活塞压力计实物照片
1
1、砝码 2、指标板 3、底座 4、调 调整螺钉 5、连接管部件 件 6、7、8 阀 9、油杯 10、 水平 平仪 11、手摇 摇泵 12、手 手轮 13、测量 量系统 图 2 活塞压力计 计结构?
2
图 3 实验系统框图?
+24V
电源开关
R1 1K
传感器供电+ 传感器供电-
D? LED0
万用表+
R2 250
万用表-
GND
图 4 实验电路接线图 实验设别型号及精度 设备名称 活塞式压力计 压力传感器 信号调理电路 精密电阻 数字电压表 直流稳压电源 设备型号 YS‐6 MPM180 RJ250 1/4W UT61E, VC9806+ DH1718G‐4 精度 0.05% 0.2% 0.2% 0.01%,?5ppm 0.02% 量程 0~0.6MPa 0~0.7MPa 0~157.156mV +24V 数量 1 1 1 1 1 1?
?
3、 实验原理 在实验中,活塞式压力计作为基准器,为压力传感器提供标准压力 0~0.6MPa。信号调 理器为压力传感器提供恒流电源,并将压力传感器输出的电压信号放大并转换为电流信号。 信号调理器输出为二线制,4‐20mA 信号在 250 欧采样电阻上转换为 1‐5V 电压信号,由 4 位 半数字电压表读出。
3
实验一 静态压力校准实验教材
实验一静态压力校准实验 一.实验目的 学习压力仪表静态校准方法 二.实验内容 使用活塞压力计校准弹簧管压力计 三.实验设备 1、YU-60活塞压力计 2、标准表 3、弹簧压力计 四.实验原理 一.压力仪表的静态校准方法 压力检测仪表的静态校准在静态标准条件下(温度20±5℃,湿度≤80%,大气压力为760±80mmHg,且无振动冲击的环境)进行,采用一定标准等级的校准装置,对仪表重复进行不少于三次的全量程逐级加载和卸载测试,并将仪表输出量与输入的标准量做比较,获得各次校准数据或曲线。一般在被校表的测量范围内,均匀的选择至少5个以上的校验点,其中包括量程起始点和终点。 静态校准方法有标准压力法与标准表法两种。标准压力法是将被校表的示值与标准压力值比较,主要用于校验0.25级以上的精密压力表,亦可用于校验各种工业用压力表。标准压力法校准进度高,但比较费力、费时。标准表法则是在相同压力条件下将被校表与标准表的示值进行比较,标准表的允许绝对误差应小于被校表允许绝对误差的1/3~1/5,这样可忽略标准表的误差,将其示值作为真实压力。标准表校验法比较快捷方便,所以实验校验中应用较多。
二.校准数据处理方法即压力仪表静态特性的计算 1.测量范围 每个用于测量的检测仪表都有其确定的测量范围,它是检测仪表按规定的精度对被测变量进行测量的允许的范围。测量范围的最小值和最大值分别为测量上限和测量上限,简称下限和上限。量程可以用来表示其测量范围的大小,用其测量上限值与下限值的代数差来表示,即 量程=|测量上限值-测量下限值| 2.精度等级 工业检测仪表系统常以最大引用误差最为判断精度等级的尺度。 3.灵敏度 灵敏度是指测量系统在静态测量时,输出量的增量与输入量的增量之比,即 对线性测量系统来说,灵敏度为 tan y x m y S K x m θ=== 亦即线性测量系统的灵敏度是常数,可由静态特性曲线(直线)的斜率来求得,如图1-1(a )所示。式中,m y 、m x 为y 轴和x 轴的比 例尺,θ为相应点切线与x 轴间的夹角。非线性测量系统的灵敏度是变化的,如图1-1(b )所示。 图 1-1
实验二二阶系统的动态特性与稳定性分析
自动控制原理 实验报告 实验名称:二阶系统的动态特性与稳定性分析班级: 姓名: 学号:
实验二 二阶系统的动态特性与稳定性分析 一、实验目的 1、 掌握二阶系统的电路模拟方法及其动态性能指标的测试技术过阻尼、临界阻尼、欠阻尼 状态 2、 分析二阶系统特征参量(ξω,n )对系统动态性能的影响; 3、 分析系统参数变化对系统稳定性的影响,加深理解“线性系统稳定性至于其结构和参数 有关,与外作用无关”的性质; 4、 了解掌握典型三阶系统的稳定状态、临界稳定、不稳定状态; 5、 学习二阶控制系统及其阶跃响应的Matlab 仿真和simulink 实现方法。 二、实验容 1、 构成各二阶控制系统模拟电路,计算传递函数,明确各参数物理意义。 2、 用Matlab 和simulink 仿真,分析其阶跃响应动态性能,得出性能指标。 3、 搭建典型二阶系统,观测各个参数下的阶跃响应曲线,并记录阶跃响应曲线的超调量 %σ、峰值时间tp 以及调节时间ts ,研究其参数变化对典型二阶系统动态性能和稳定 性的影响; 4、 搭建典型三阶系统,观测各个参数下的阶跃响应曲线,并记录阶跃响应曲线的超调量 %σ、峰值时间tp 以及调节时间ts ,研究其参数变化对典型三阶系统动态性能和稳定 性的影响; 5、 将软件仿真结果与模拟电路观测的结果做比较。 三、实验步骤 1、 二阶系统的模拟电路实现原理 将二阶系统: ωωξω22)(22 n n s G s s n ++= 可分解为一个比例环节,一个惯性环节和一个积分环节
ωωξω221)() ()()(2C C C C s C C 2 22 6215423 2 15423 2 2154215426316 320 n n s s s s s G s s s C R R R R R R R R R R R R C R R R R R R R R R U U n i ++= ++=++== 2、 研究特征参量ξ对二阶系统性能的影响 将二阶系统固有频率5.12n =ω保持不变,测试阻尼系数ξ不同时系统的特性,搭建模拟电路,改变电阻R6可改变ξ的值 当R6=50K 时,二阶系统阻尼系数ξ=0.8 当R6=100K 时,二阶系统阻尼系数ξ=0.4 当R6=200K 时,二阶系统阻尼系数ξ=0.2 (1)用Matlab 软件仿真实现二阶系统的阶跃响应,计算超调量%σ、峰值时间tp 以及调节时间ts 。 当12.5n =ω,0.8=ξ时: clear g=tf(12.5^2,[1 25*0.8 12.5^2]), step(g) Transfer function: 156.3 ------------------- s^2 + 200 s + 156.3