GPS技术实现分布式数据同步采集系统
GPS技术实现分布式数据同步采集系统
采集系统自身的环境限制导致设备的分散性,保证各个采集设备之间数据的同步性,使之分析出来的结果更具有研究和使用价值,并在一个可控的成本下实现,是摆在设计者面前的难题。相对于其他2 种技术方案:基于短距离低成本的机箱同步技术和基于长距离高成本的卫星同步技术。GPS PPS 是一种集2 者优点于一身的时钟同步技术。不仅能获得和高成本技术相同的效果,并且还能节约大量成本。
一.分布式实时采集系统概述
东海大桥由于身处外海海域,不仅需要经受海水腐蚀、地震台风自然灾害、还有各种通行工具对桥梁结构造成缓慢的损害。对桥梁进行实时监测,为了及时获知桥梁的健康状况,对各种突发时间做出响应,以及进行必要的养护工作,延长桥梁的使用寿命。监测数据还能进行进一步研究分析,对桥梁的基础研究具有非常大的帮助。
为什么要使用时钟同步技术?由于桥梁属于较为特殊的结构,构造范围很广,监测点分散在各处,很多监测项目又具有实时性的特点,例如地震、台风、交通事故等等,对于各部位监测数据需要非常准确的时间同步,一般的数据采集技术难以达到监测要求,如果不采用时钟同步技术,极有可能造成各个监测点采集数据时间上的微小误差,不仅造成监测结果的不准确,还严重影响了对桥梁健康的研究分析。而通过GPS 时钟同步技术完全可以避免这些问题。
二.GPS PPS 技术和其他时钟同步技术介绍与比较
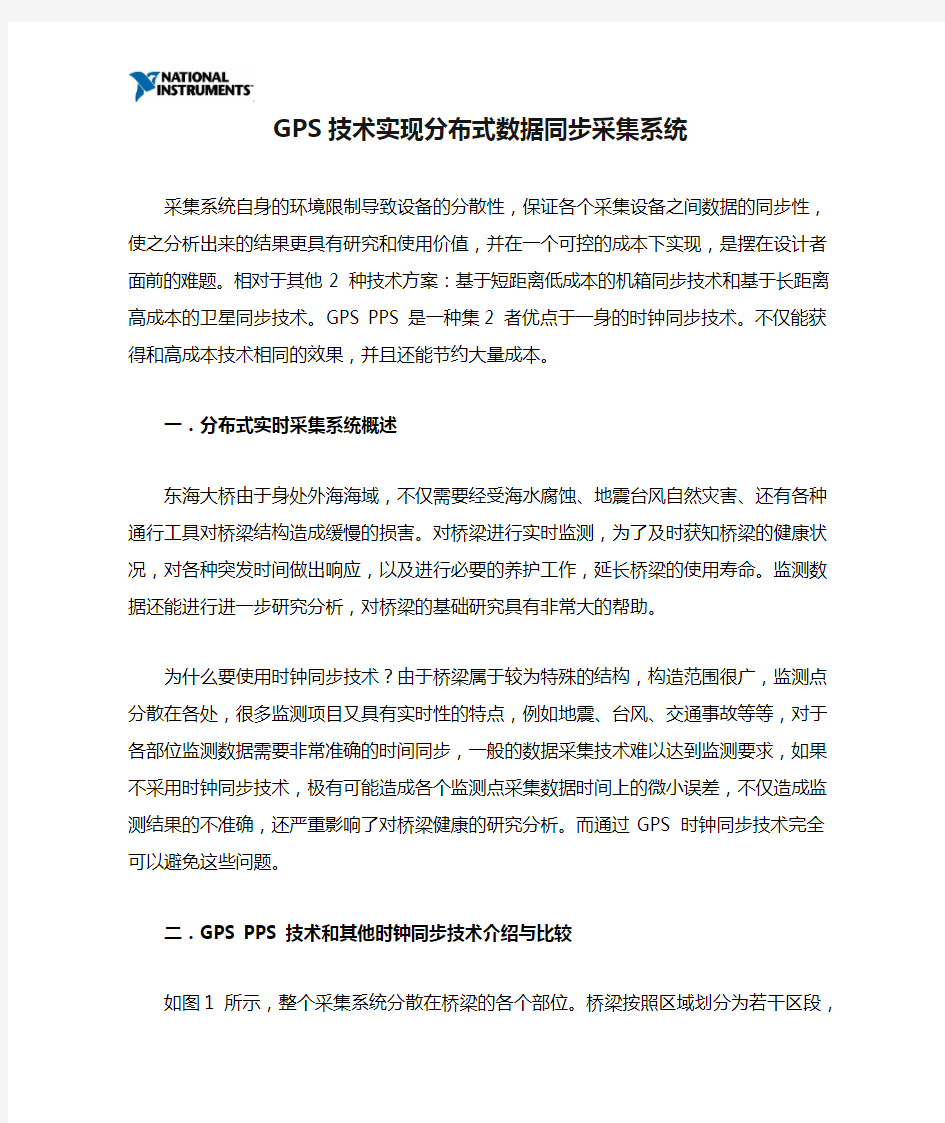
如图1 所示,整个采集系统分散在桥梁的各个部位。桥梁按照区域划分为若干区段,在主要几个区段中安置着信号采集机站,各个采集机站之间相距几公里甚至十几公里,每组采集机站均和GPS 同步时钟接受器相连,GPS PPS 接收器接受GPS 时钟同步信号,做相应的处理得到时钟同步信号和绝对时间戳并发送给PXI 采集设备,采集设备接收处理后的GPS同步信号,达到同步整个分布式采集系统。
图1 桥梁健康监测系统的预警监测图
这里说的时钟同步有2 方面含义:
● 数据采样频率的同步,包括采样时钟信号的脉冲同步以及相位同步。
● 时间轴上的同步,即采样点时间标签的同步。
只有2方面都达到同步,才能称为真正的同步采集。目前除了GPS PPS 时钟同步技术方案外,主要还有其他2 种时钟同步技术方案:
1. 机箱直连时钟同步技术:
主要采用了PXI 6653 时钟同步模块的时钟频率共享技术,每个采集设备中都装有PXI 6653 时钟同步模块,然后用同轴电缆把各个采集设备的6653 模块相连,以其中一个模块作为主模块,其余的作为从模块;
主模块内部的时钟信号通过同轴电缆同步从模块内部的时钟信号,PXI 4472B 都用次信号作为采样时钟。时间戳同步可以采用网络时间服务器。
2. GPS IRIG-B 时钟同步技术:
该技术与GPS PPS 技术极为相似,都是通过GPS接收器接收GPS同步信号,做相应的处理并发送给采集设备做采集同步,和GPSPPS所不同的是IRIG-B 时钟同步信号中含有绝对时间,需要由PXI6608 来接收该信号,并将其解析为可用的时间戳。
3. 三种时钟同步技术的比较:
4. 适用性
机箱同步技术由于电缆的局限性,距离过长会导致信号衰减,很难做到公里级数的时钟同步采集,所以在本系统中无法适用。而GPSPPS和GPS IRIG-B 技术都采用卫星来作为同步时钟信号传输的载体,可以做到无地域限制的同步采集,符合本系统的同步需求。
2. 准确性
机箱同步技术采用主从时钟模块同步的方式,以一个时钟模块的内部时钟作为其余时钟模块的参考时钟,虽然理论上同步的准确性可以保证,但是由于信号通过电缆作为载体发送,长时间运行后,电缆的自身老化以及外部的突发事件是否会对信号的造成干扰,不得而知。而其它2 种GPS 技术,在时钟信号的传输上都采用卫星无线发送,极少会受到信号干扰,唯一需要担心的是信号接收天线的维护。
3. 成本对比
机箱同步技术由于无需额外的GPS信号接收设备,所以成本最低。GPS IRIG-B 技术不仅需要额外采用相对昂贵的PXI 6608,还须包括GPS IRIG-B 信号接收器的成本。而GPS PPS 可以把PXI 6608换成便宜的PXI 6602,PXI 6653 换成PXI 6652,并且GPS PPS信号接收器的成本远远低于GPS IRIG-B。三.GPS PPS 时钟同步技术的系统组成
该系统主要由GPS 接收器和NI PXI 采集设备2 大部分组成。结构如图2:
图2 GPS PPS 时钟同步系统组成图
1. GPS 接收器系统组成
GPS 同步时钟接收器的输入端连接着一个GPS信号接受天线,接受来自GPS 卫星发送的时钟信号,输出端分为3部分:
● 10M PPS(Pulse Per Second)信号:用于同步采集系统,作为采集系统的采样基频。此信号不包含任何的时间信息,仅仅为简单的脉冲信号,脉冲间隔为10纳秒。
● 1 PPS(Pulse Per Second)信号:用于采集系统触发采集使用,此信号同上,仅仅为简单的脉冲信号,脉冲间隔为1秒。● 绝对时间(GMT)信号:用于替代采集系统自身的时间标签,此信号采用NEMA标准。
对于PPS(Pulse Per Second)信号,如图所示,它是一个很简单的,不包含任何时间信息(年或月之类)的脉冲信号,以1PPS为例,每秒发生1次脉冲,每个脉冲的宽度通常为100毫秒,PPS信号是一种较为简单的同步技术,但其效果却不亚于任何复杂的同步时钟信号。
绝对时间信号,该信号采用NEMA标准,表现形式为GMT时间,以字符串方式显示,例如“06.001?”,其中第一部分为年份,第二部分为年中天数,第三部分为一天的具体时间,精确到秒级。
图3 GPS PPS 信号接收器硬件组成图
2. PXI 采集设备系统组成
PXI 采集设备采用NI PXI 1045 18槽机箱,NI PXI 8187主控制器为主,采集卡为NI PXI 6652、6602、4472B,其中:
● PXI 6652时钟同步模块采用NI提供的SMB(类似BNC 同轴电缆的接口)接口于GPS接收器的10M PPS 输出端相连,接收10MPPS时钟信号,并且将此时钟信号进行分频,把分频后的时钟信号提供到PXI 机箱背板,提供给高速同步采集卡PXI 4472B作为采样时钟频率。
● PXI 6602 计数器采用接线段子板与GPS接收器的1 PPS输出端相连,需要同时接入2个输入端口,都接收1 PPS信号,第一个输入端收到信号后,按1 PPS频率进行计数,并设定采集时间,当达到采集的起始时间,PXI 6602提供触发信号,触发PXI4472B开始采集;第二个输入端的1 PPS频率脉冲为4472B 提供相位同步触发脉冲。
● PXI 8187 控制器的标准232 串口与GPS 接收器的绝对时间输出端相连,接收GPS接收器提供的绝对时间信息,并计算每个采样点的时间间隔+触发开始的绝对时间来获取该采样点的绝对时间标签。
需要注意的是,PXI 6652采集卡必须插在机箱的第二个槽位,即主控制器相邻的槽位,否则时钟同步无效。
图4 PXI工控机箱硬件组成图
四.系统的设计与实现
该系统的软件开发是以Labview 7.1 为平台,并配以NI-SYNC 开发工具包。采用PXI 1045 18 槽机箱,PXI 8187 主控制器,PXI6652 时钟同步模块,PXI 6602 计数器模块,PXI 4472B 动态信号采集卡等作为硬件基础。开发人员则通过NI-SYNC 开发工具包以及Labview DAQmx 采集模块对相关硬件进行开发。
1. 获取GPS 时钟同步信号
首先通过NI-SYNC开发工具包提供的编程模块对PXI 6652进行相应配置。开启6652 的PLL 锁相环以及PLL 频率,设置10M PPS信号的输入端获取同步时钟信号,对时钟信号分频,将分频后时钟信号发布到机箱背板的PXI_STAR 信号线上进行时钟频率脉冲同步,并将PXI_Trig2 触发线(源)连接到PXI_Trig5 触发线上,以同步频率时钟为触发频率进行相位同步的设置。
2. 配置6602 计数器模块
通过Labview DAQmx模块对PXI 6602 进行配置,首先设置6602的第2 个1 PPS 输入端将信号发送给PXI_Trig2 给4472B 的相位同步做准备,然后设置6602 的第1 个1 PPS 输入断将信号发送给PXI_Trig0 作为4472B 触发采集信号,最后根据定时触发采样的时间戳,设置6602 倒计时器的初始数值,倒计时开启触发采样。
3. 触发4472B 动态信号采集卡
通过Labview DAQmx 模块,将PXI_STAR 信号线作为4472B 的采样时钟频率源的时钟频率,将
PXI_Ttrig5 信号线作为相位同步源;并设置PXI_TRIG0 信号通过6602 的计时触发信号开启4472B的采集工作。
如图3 所示,完成所有设置,并开启采集任务后,按照预定的采集时间,采集设备自动同步开始采集。经检验,采样数据无论从采样时钟同步还是相位同步都达到了预期的要求。
图5 GPS时钟同步采集系统测试界面
五.总结与展望
本系统采用了目前技术领先的GPS PPS 时钟同步技术,以及NI 模块化数据采集设备。通过对现有的采集同步技术进行一系列对比,从适用性、准确性、成本等多方面考虑,GPS PPS 时钟同步技术具有相当的优势,并倚靠Labview强大的开发平台进行设计,成功的完成了整个采集系统设计,达到了最初的设计功能指标,节约了大量的人力物力成本。
GPS同步技术经过多年的发展以及大量应用,现在已经有了比较成熟的开发方案,与现有的NI 采集系统相结合开发,对于大型分布式采集系统,有着得天独厚的优势,不仅打破了原有时钟同步技术的地域局限,并且在完成相同功能的情况下,降低了GPS技术的开发成本。该系统目前已经全部开发完成并投入了正式
的运行,对东海大桥的健康安全起着至关重要的作用,得到了业主以及相关桥梁研究人员的肯定;除了桥梁健康监测以外,其他一些大型结构项目的健康监测也完全适用于该系统,应用前景非常广阔。
警用车载物联网数据采集终端
警用车载物联网监控系统 方案建议书 目录 解决方案 (3) 1.1、系统组成 (3) 1.1.1、车载前端视频采集子系统 (4) 1.1.2、无线公网传输子系统 (7) 1.1.3、警用车载物联网数据采集终端传输子系统 (8)
1.1.4、监控指挥中心 (15) 1.2系统特点 (22) 1.2.1、强大的网络传输技术 (22) 1.2.2、嵌入式硬件特色 (23) 1.2.4、安防行业的特色应用 (25) 1.2.5、多功能化客户端软件 (25) 1.3系统功能介绍 (26) 1.3.1、电子地图 (26) 1.3.2、分层结构管理 (26) 1.3.3、现场的实时视频监控和采集 (27) 1.3.4、监控信息的存储和备份 (27) 1.3.5、全方位云台及周边设备的与控制 (27) 1.3.6、GPS定位 (27) 1.3.7、现场应急指挥 (28) 1.3.8、警用器材在线管理 (28)
解决方案 为了解决前端随车图像的能及时回传到监控中心的需求;无线视频服务器得到广泛应用。警用车载物联网数据采集终端,就是很好的选择。无线EVDO视频传输+GPS定位+双向语音对讲+警用设备管理,功能四合一,高科技高度集成。 1.1、系统组成 无线视频执法系统由车载前端视频采集子系统、无线公网传输子系统(EVDO)、无线车载视频传输子系统、监控指挥中心子系统四部分。
1.1.1、车载前端视频采集子系统 车载摄像机有2款供选择:一款为不带红外灯的吸盘式摄像机,一款带红外灯的固定安装(可选吸盘式)摄像机。 一体化吸盘式摄像机特点 吸盘式摄像机主要用于车载使用。该款摄像机既可以固定安装在车顶上,也可以通过吸盘的磁性安吸附在车顶上。 吸盘式摄像机集云台、云台解码器、SONY480机芯与一体,重量轻,易于安装盒携带。 摄像机机芯可选18倍镜头的SONY FCB-CX480CP或26倍镜头的SONYFCB-CX980P 水平和垂直传动机构采用减震装臵,解决了由于车辆行驶和刹车而产生的振动、冲击而造成云台传动部件的损坏之难题。 为了解决车辆行驶过程中由于路面不平而使被监视对像脱离监视器画面,吸盘式摄像机设计了跟踪防抖系统,彻底解决了 同类产品在车辆行驶过程中不能正常监控的难题。 为了最大限度的缩小云台控制系统的体积和安装的繁琐,采用6芯线缆和航空接头,既方便安装连接又减少了布线。 吸盘式摄像机设计的磁性底座安装时车顶无需钻孔,拆卸时不破坏车顶表面油漆,拆装可在几秒钟之内完成,方便、省时、
分布式数据同步平台功能说明书
分布式数据同步平台【产品DATA】 2020年7月30日
目录 一、分布式数据同步平台 (3) 1、运行报表 (3) 2、项目管理 (4) 3、数据源管理 (4) 4、执行器管理 (5) 5、日志管理 (5) 6、资源监控 (6) 二、任务管理 (7) 1、任务管理 (7) 2、任务构建 (9) 3、任务批量构建 (10) 4、任务模版 (10) 三、平台管理 (11) 1、用户管理 (11)
一、分布式数据同步平台 分布式数据同步平台,提供简单易用的操作界面,降低用户使用同步工具成本,缩短任务配置时间,避免配置过程中出错。用户可通过页面选择数据源即可创建数据同步任务,RDBMS数据源可批量创建数据同步任务,支持实时查看数据同步进度及日志并提供终止同步功能,集成分布式任务调度平台可根据时间、自增主键增量同步数据。任务"执行器"支持集群部署,支持执行器多节点路由策略选择,支持超时控制、失败重试、失败告警、任务依赖,执行器CPU.内存.负载的监控等等。后续可以提供更多的数据源支持、数据同步等更为复杂的业务场景(可定制)。 1、运行报表 支持实时查看运行数据,以及调度报表,如调度日期分布图,调度成功分布图等
2、项目管理 项目管理模块,可对任务分类管理; 3、数据源管理 支持7种不同关系型数据库源和NOSQL数据库,
4、执行器管理 "调度中心OnLine:"右侧显示在线的"调度中心"列表, 任务执行结束后, 将会以failover的模式进行回调调度中心通知执行结果, 避免回调的单点风险; "执行器列表" 中显示在线的执行器列表, 可通过"OnLine 机器"查看对应执行器的集群机器; 5、日志管理 可以点击查看日志,实时获取日志信息,终止正在执行的datax进程
最新分布式电压采集系统
分布式电压采集系统
分布式电压采集系统 1.目的 利用单片机双机通信实现多通道采集控制以及采集电压的异地显示。 2.系统组成 图1 系统组成 3.基本设计要求 (1)甲机用于电压信号的采集,要求采集2路电压信号(信号源可由电位器分压得到),将当前采样的通道号和电压值在数码管或LCD进行显示。 (2)实现甲机和乙机的数据通信,采用RS-232方式完成通信接口。 (3)乙机通过键盘设置甲机的采集电压通道,并将给信息发送给甲机。 4.发挥部分 (1)乙机控制甲机电压采集通道,并接收甲机的采集电压数据在乙机的数码管或LCD上进行显示。
(2)增加实现2路信号的同时采集的功能,并进行采样电压的同时显示。 (3)其他发挥。 注:发挥部分前两点可不用同时满足。留出相关测试点,程序固化到单片机中。 电路图:略 甲机程序: #include
sbit EOC = P3^1; sbit OE = P3^7; sbit ADC_C = P2^0; sbit ADC_B = P2^1; sbit ADC_A = P2^2; sbit W1=P2^3; sbit W2=P2^4; sbit W3=P2^5; sbit W4=P2^6; sbit wela=P2^7; ////////带小数点数码管显示编码/////////// uchar data numtable_DE[] = { 0x40,0x79,0x24,0x30, 0x19,0x12,0x02,0x78, 0x00,0x10 }; ////////不带小数点数码管显示编码/////////// uchar data numtable[] = { 0xb0,0xf9,0xa4,0xa0, 0x99,0x92,0x82,0xf8,
Oracle数据库同步技术
基于Oracle数据库的数据同步技术大体上可分为两类:Oracle自己提供的数据同步技术和第三方厂商提供的数据同步技术。Oracle自己的同步技术有DataGuard,Streams,Advanced Replication和今年 刚收购的一款叫做GoldenGate的数据同步软件。第三方厂商的数据同步技术有Quest公司的SharePlex 和DSG的RealSync。下面对这些技术逐一进行介绍。 一、DataGuard数据同步技术 DataGuard是Oracle数据库自带的数据同步功能,基本原理是将日志文件从原数据库传输到目标数据库,然后在目标数据库上应用(Apply)这些日志文件,从而使目标数据库与源数据库保持同步。DataGuard 提供了三种日志传输(Redo Transport)方式,分别是ARCH传输、LGWR同步传输和LGWR异步传输。在上述三种日志传输方式的基础上,提供了三种数据保护模式,即最大性能(Maximum Performance Mode)、最大保护(Maximum Protection Mode)和最大可用(Maximum Availability Mode),其中最大保护模式 和最大可用模式要求日志传输必须用LGWR同步传输方式,最大性能模式下可用任何一种日志传输方式。 最大性能模式:这种模式是默认的数据保护模式,在不影响源数据库性能的条件下提供尽可能高的 数据保护等级。在该种模式下,一旦日志数据写到源数据库的联机日志文件,事务即可提交,不必等待日 志写到目标数据库,如果网络带宽充足,该种模式可提供类似于最大可用模式的数据保护等级。 最大保护模式:在这种模式下,日志数据必须同时写到源数据库的联机日志文件和至少一个目标库 的备用日志文件(standby redo log),事务才能提交。这种模式可确保数据零丢失,但代价是源数据库的可用性,一旦日志数据不能写到至少一个目标库的备用日志文件(standby redo log),源数据库将会被关闭。这也是目前市场上唯一的一种可确保数据零丢失的数据同步解决方案。 最大可用模式:这种模式在不牺牲源数据库可用性的条件下提供了尽可能高的数据保护等级。与最 大保护模式一样,日志数据需同时写到源数据库的联机日志文件和至少一个目标库的备用日志文件(standby redo log),事务才能提交,与最大保护模式不同的是,如果日志数据不能写到至少一个目标库的备用日志文件(standby redo log),源数据库不会被关闭,而是运行在最大性能模式下,待故障解决并将延迟的日志成功应用在目标库上以后,源数据库将会自动回到最大可用模式下。 根据在目标库上日志应用(Log Apply)方式的不同,DataGuard可分为Physical Standby(Redo Apply)和Logical Standby(SQL Apply)两种。 Physical Standby数据库,在这种方式下,目标库通过介质恢复的方式保持与源数据库同步,这种方 式支持任何类型的数据对象和数据类型,一些对数据库物理结构的操作如数据文件的添加,删除等也可支持。如果需要,Physical Standby数据库可以只读方式打开,用于报表查询、数据校验等操作,待这些操 作完成后再将数据库置于日志应用模式下。 Logical Standby数据库,在这种方式下,目标库处于打开状态,通过LogMiner挖掘从源数据库传 输过来的日志,构造成SQL语句,然后在目标库上执行这些SQL,使之与源数据库保持同步。由于数据 库处于打开状态,因此可以在SQL Apply更新数据库的同时将原来在源数据库上执行的一些查询、报表等操作放到目标库上来执行,以减轻源数据库的压力,提高其性能。 DataGuard数据同步技术有以下优势: 1)Oracle数据库自身内置的功能,与每个Oracle新版本的新特性(如ASM)都完全兼容,且不 需要另外付费; 2)配置管理较简单,不需要熟悉其他第三方的软件产品; 3)Physical Standby数据库支持任何类型的数据对象和数据类型;
面向高速动车组静态调试的车载数据无线采集系统的研究
147 中国设备 工程 Engineer ing hina C P l ant 中国设备工程 2019.02 (上)目前高速铁路得到了迅速发展,在一代又一代铁路人的努力下,我国成为运营里程最长以及商业运营速度最快的国家。取得这样瞩目的成绩,与不断升级的动车组研发平台、数字化调试平台以及高效的维护与管理平台有着密不可分的关系。作为高速动车组生产制造以及出厂调试的重要组成部分,数字化调试平台通过分阶段,分批次的建设,目前已取的显著的成果,工程师在数字化调试平台的辅助下可以对车型、任务、资源等信息进行统一的维护及管理,并辅助工程师进行调试任务的下载、分配、记录和信息上传等工作。 然而,由于绝大部分试验数据需要依靠专门研发的工艺装备去采集获取;试验效率在取得阶段性提升后,又受制于相关工艺装备的工作性能及稳定性,因此,研究一套可以进一步提高调试效率的系统迫在眉睫。随着高速动车组的生产制造逐渐步入正轨,车载网络已基本实现全车主要设备工作状态数据的实时采集与监视,本文通过研究车载网络数据的采集技术,设计了车载网络数据远程无线传输系统,实现了调试任务远程制定、分配、监控、支持和分析。1?系统概述 数字化无线调试系统主要包括四个部分,分别是具备无线传输功能的车载网络数据采集设备、数字化调试平台地面服务器、数字化调试平台以及车载数据展示平台。车载网络数据采集装置通过车载无线传输网关(WTD)或者多功能车辆总线(MVB)采集到高速动车组整车数据后,将动车运行状态信息、安全信息等车载数据通过无线网传输至地面的服务器进行存储,服务器软件接收到应用数据后,一方面实时转发至数字化调试平台和数据展示平台,另一方面做数据的冗余备份,为后续建设列车大数据平台提供真实的数据和资源,见图1。2?子系统的构成2.1 数据采集设备 车载网络数据采集装置接入高速动车组车载网络,通过WLAN 无线通讯模块对数据进行转发。设备启动时无线通信模块自动连接到调试厂房内数字化调试平台的无线AP 端, 连接建立后,将车载网络数据实时发送至数字化调试平台地面服务器。为了实现设备便携化、可移动、环境适应能力强的特点,设备硬件接口进行了防水防尘处理;采用了可靠性高、环境适应性强、可以快速连接和分离的航空插头;电源部分提供了交流220V 和110V 接口,同时还提供了可以维持设备2小时连续运行的移动电源,极大的扩展了设备的应用场景。 根据数据采集设备的功能划分,设备主要由电源模块、数据处理模块、无线模块和机箱外部接口等四个部分组成。 (1)数据处理模块主要提供ADC 采样电路,时钟电路,RJ45网络接口,双层DB9接口等外围部件,使用Zynq 系列芯片作为核心处理器,实时处理从列车总线采集到的报文信息。为了增加可靠性,在发热量较大的芯片上方添加风扇辅助散热,并通过导热装置增加热量耗散,防止电路过热出现性能下降等问题。 (2)电源模块主要实现了电压的转换,将外接电源AC220V 或者DC110V 转换为电路板所需的12V 电压,电池电压为12V 可以直接进行供电,该模块还包含充电电路,可以在接入外接电源时为电池充电。 (3)机箱外部接口均由航空插头作为连接器,主要包括RJ45标准以太网接口、交流220V 接口、直流110V 接口 面向高速动车组静态调试的 车载数据无线采集系统的研究 赵建博1,孙晓东1,李彤2 (1.中车青岛四方机车车辆股份有限公司,山东?青岛?266111,2.北京润科通用技术有限公司,上海?200235)摘要:本文主要针对高速动车组调试作业中车载网络数据实时采集、远程地面服务器存储及转发数据进行研究,设计并生产了切实可行的满足前述功能、具备实际使用功效的服务软件及远程无线数据采集设备。为数字化调试平台的建设提供了新的技术路线,提高了高速动车组的调试效率。 关键词:高速动车组;无线数据下载设备;远程服务 中图分类号:U292 文献标识码:A 文章编号:1671-0711(2019)02(上)-0147-02 图1?无线数据采集系统
GPS技术实现分布式数据同步采集系统
GPS技术实现分布式数据同步采集系统 采集系统自身的环境限制导致设备的分散性,保证各个采集设备之间数据的同步性,使之分析出来的结果更具有研究和使用价值,并在一个可控的成本下实现,是摆在设计者面前的难题。相对于其他2 种技术方案:基于短距离低成本的机箱同步技术和基于长距离高成本的卫星同步技术。GPS PPS 是一种集2 者优点于一身的时钟同步技术。不仅能获得和高成本技术相同的效果,并且还能节约大量成本。 一.分布式实时采集系统概述 东海大桥由于身处外海海域,不仅需要经受海水腐蚀、地震台风自然灾害、还有各种通行工具对桥梁结构造成缓慢的损害。对桥梁进行实时监测,为了及时获知桥梁的健康状况,对各种突发时间做出响应,以及进行必要的养护工作,延长桥梁的使用寿命。监测数据还能进行进一步研究分析,对桥梁的基础研究具有非常大的帮助。 为什么要使用时钟同步技术?由于桥梁属于较为特殊的结构,构造范围很广,监测点分散在各处,很多监测项目又具有实时性的特点,例如地震、台风、交通事故等等,对于各部位监测数据需要非常准确的时间同步,一般的数据采集技术难以达到监测要求,如果不采用时钟同步技术,极有可能造成各个监测点采集数据时间上的微小误差,不仅造成监测结果的不准确,还严重影响了对桥梁健康的研究分析。而通过GPS 时钟同步技术完全可以避免这些问题。 二.GPS PPS 技术和其他时钟同步技术介绍与比较 如图1 所示,整个采集系统分散在桥梁的各个部位。桥梁按照区域划分为若干区段,在主要几个区段中安置着信号采集机站,各个采集机站之间相距几公里甚至十几公里,每组采集机站均和GPS 同步时钟接受器相连,GPS PPS 接收器接受GPS 时钟同步信号,做相应的处理得到时钟同步信号和绝对时间戳并发送给PXI 采集设备,采集设备接收处理后的GPS同步信号,达到同步整个分布式采集系统。 图1 桥梁健康监测系统的预警监测图 这里说的时钟同步有2 方面含义: ● 数据采样频率的同步,包括采样时钟信号的脉冲同步以及相位同步。 ● 时间轴上的同步,即采样点时间标签的同步。 只有2方面都达到同步,才能称为真正的同步采集。目前除了GPS PPS 时钟同步技术方案外,主要还有其他2 种时钟同步技术方案: 1. 机箱直连时钟同步技术: 主要采用了PXI 6653 时钟同步模块的时钟频率共享技术,每个采集设备中都装有PXI 6653 时钟同步模块,然后用同轴电缆把各个采集设备的6653 模块相连,以其中一个模块作为主模块,其余的作为从模块;
数据采集系统的历史与发展
数据采集系统的历史与发展 数据采集系统起始于20设计50年代,1956年美国首先研究了用在军事上的测试系统,目标是测试中不依靠相关的测试文件,由非熟练人员进行操作,并且测试任务是由测试设备高速自动控制完成的。由于该种数据采集测试系统具有高速性和一定的 灵活性可以满足众多传统方法不能完成的数据采集和测试任务,因而得到了初步的认可。大约在60年代后期,国外就有成套的数据采集设备产品进入市场,此阶段的数据采集设备和系统多属于专业的系统。 20世纪70年代中后期,随着微型的发展,诞生了采集器,仪表同计算机溶于一 体的数据采集系统。由于这种数据采集系统的性能优良,超过了传统的自是这一类的 典型代表。这种接口系统采用积木式结构,把相应的接口卡装在专用的机箱内,然后 由一台计算机控制。第二类系统在工业现场应用较多。这两种系统中,如果采集测试 任务改变,只需将新的仪用电缆接入系统,或将新卡在添加的专业的机箱里即可完成 硬件平台中建,如果采集测试任务改变,只需将新的仪用电缆接入系统,或将新卡再 添加到专用的机箱即可完成硬件平台重建,显然,这种系统比专用系统灵活得多。20 世纪80年代后期,数据采集系统发生了极大的变化,工业计算机,单片机和大规模集成电路的组合,用软件管理,使系统的成本降低,体积减小,功能成倍增加,数据处 理能力大大加强。 20世纪90年代至今,在国际上技术先进的国家,数据采集技术已经在军事,航 空电子设备及宇航技术,工业等领域被广泛应用。由于集成电路制造技术的不断提高,出现了高性能,高可靠性的单片数据采集系统(DAS)。目前有的DAS产品精度已达16位,采集速度每秒达到几十万次以上。数据采集技术已经成为一种专门的技术,在工业领域得到了广泛的应用。该阶段数据采集系统采用更先进的模块式结构,根据不 同的应用要求,通过简单的增加和更改模块,并结合系统编程,就可扩展或修改系统,迅速地组成一个新的系统。该阶段并行总线数据采集系统高速,模块化和即插即用方 向发展,典型系统有VXI总线系统,PCI,PXI总线系统等,数据位以达到32位总线宽度,采用频率可以达到100MSps。由于采用了高密度,屏蔽型,针孔式的连接器和卡 式模块,可以充分保证其隐定性急可靠性,但其昂贵的价格是阻碍它在自动化领域取 得了成功的应用。 串行总线数据采集系统向分布式系统结构和智能化方向发展,可靠性不断提高。 数据采集系统物理层通信,由于采用RS485双绞线,电力载波,无线和光纤,所以其技术得到了不断发展和完善。其在工业现场数据采集和控制等众多领域得到了广泛的 应用。由于目前局域网技术的发展,一个工厂管理层局域网,车间层的局域网和底层 的设备网已经可以有效地连接在一起,可以有效地把多台数据采集设备联在一起,以 实现生产环节的在线实时数据采集与监控。
基于同步的数据共享实现方案概论
基于同步的数据共享实现方案概论 摘要随着企业IT系统架构进入“互联网+”时代,企业应用软件也越来越多地采用分布式数据库进行数据存储。企业数据的共享是IT系统中重要的一个环节,如何实现数据分布式存储架构的数据共享就成为一个重要的课题了,特别是大批量的数据共享就显得尤为重要,本文就数据分布式存储后基于数据同步方案的数据共享技术进行方案设计。 关键词分布式数据库;数据共享;数据分发;分布式缓存 前言 在分布式系统架构中,数据分布式存储,提升了数据库的水平扩展能力,但是受限分布式数据库的特性,分布式数据库数据分散存储,缺乏传统Oracle数据库的DBLink链路数据共享机制、也难以像传统的集中数据一样进行复杂的关联,给数据共享带来了不少的困难。 1 需求及思路 分布式系统架构中,从web、服务到数据存储按照分布式系统架构设计方法,各层实现分布式能力。其中,数据分布式存储是整个架构的基础。数据分布式存储:按照高内聚的原则,对数据按照时间、功能、ID等维度进行垂直和水平切分,分片存储。 在分布式数据存储中,数据分散存储,为支持业务实现,需要考虑数据的快速发布,主要的数据分发场景:①配置类数据同步给周边系统,②全局配置类数据更新發布到分布式缓存。 借鉴互联网架构经验,数据的共享主要有两种方式:一是数据服务化,二是数据同步冗余方式,对于大批量的数据共享通常为提升应用性能,部分全局的数据在分布式数据节点中都保存,但是一旦数据库的数据发生变化,通知每个分布的服务更新内存数据,修改后需要同步给其他所有的数据库节点。 2 总体方案 数据同步主要包括获取变化数据和数据发布两个环节: (1)获取变化数据,需要能够通过数据变化事件等方式获取变化的数据,常用方案: ①通过时间戳+版本号识别;②通过应用同步写入数据变化事件记录;③通过数据库日志生成数据变更事件。
数据库实时同步技术解决方案
数据库实时同步技术解决方案 一、前言 随着企业的不断发展,企业信息化的不断深入,企业内部存在着各种各样的异构软、硬件平台,形成了分布式异构数据源。当企业各应用系统间需要进行数据交流时,其效率及准确性、及时性必然受到影响。为了便于信息资源的统一管理及综合利用,保障各业务部门的业务需求及协调工作,常常涉及到相关数据库数据实时同步处理。基于数据库的各类应用系统层出不穷,可能涉及到包括ACCESS、SQLSERVER、ORACLE、DB2、MYSQL等数据库。目前国内外几家大型的数据库厂商提出的异构数据库复制方案主要有:Oracle的透明网关技术,IBM的CCD表(一致变化数据表)方案,微软公司的出版者/订阅等方案。但由于上述系统致力于解决异构数据库间复杂的交互操作,过于大而全而且费用较高,并不符合一些中小企业的实际需求。 本文结合企业的实际应用实践经验,根据不同的应用类型,给出了相应的数据库实时同步应用的具体解决方案,主要包括: (1) SQLSERVER 到SQLSERVER 同步方案 (2) ORACLE 到SQLSERVER 同步方案 (3) ACCESS 到SQLSERVER/ORACLE 同步方案
二、异构数据库 异构数据库系统是相关的多个数据库系统的集合,可以实现数据的共享和透明访问,每个数据库系统在加入异构数据库系统之前本身就已经存在,拥有自己的DMBS。异构数据库的各个组成部分具有自身的自治性,实现数据共享的同时,每个数据库系统仍保有自己的应用特性、完整性控制和安全性控制。异构数据库的异构性主要体现在以下几个方面: 1、计算机体系结构的异构 各数据库可以分别运行在大型机、小型机、工作站、PC嵌入式系统中。 2、基础操作系统的异构 各个数据库系统的基础操作系统可以是Unix、Windows NT、Linux等。 3、DMBS本身的异构 可以是同为关系型数据库系统的Oracle、SQL Server等,也可以是不同数据模型的数据库,如关系、模式、层次、网络、面向对象,函数型数据库共同组成一个异构数据库系统。 三、数据库同步技术
分布式数据采集系统中的时钟同步[图]
分布式数据采集系统中的时钟同步[图] 在高速数据传输的分布式数据采集系统中,各个组成单元间的时钟同步是保证系统正常工作的关键。由于系统工作于局域网,于是借鉴了IEEE1588时钟同步协议的原理,设计出简易、高效的时钟同步方案,并在基于局域网的分布式数据采集系统中实现微秒级的精确同步。鉴于方案的高可行性和高效性,可将其推广到其他分布式局域网系统中。 引言 随着网络技术的发展,各种分布式的网络和局域网都得到了广泛的应用[1]。分布式数据采集系统广泛应用于船舶、飞机等采集数据多、实时性要求较高的地方。同步采集是这类分布式数据采集系统的一个重要要求,数据采集的实时性、准确性和系统的高效性都要求系统能进行实时数据通信。因此,分布式数据采集系统中的一个关键技术就是实现数据的同步传输。由于产生时钟的晶振具有频率漂移的特性,故对于具有多个采集终端的分布式系统,如果仅仅在系统启动时进行一次同步,数据的同步传输将会随着系统运行时间的增长而失步。因此时钟的同步就是保证数据同步传输的关键所在。2002年提出的IEEE1588标准旨在解决网络的时钟同步问题。它制定了将分散在测量和控制系统内的分离节点上独立运行的时钟,同步到一个高精度和高准确度时钟上的协议。 由于分布式数据采集系统工作于局域网的环境中,于是借鉴IEEE1588标准中的思想,设计出一种针对基于局域网的分布式系统的时钟同步的机制,成功地在分布式数据采集系统中实现了μs级的同步。 1 时钟同步原理及实现 时钟同步原理借鉴了IEEE1588协议中的同步原理。IEEE1588 定义了一个在工业自动化系统中的精确同步时钟协议(PTP 协议),该协议与网络交流、本地计算和分配对象有关。IEEE1588 时钟协议规定,在进行时钟同步时,先由主设备通过多播形式发出时钟同步报文,所有与主设备在同一个域中的设备都将收到该同步报文。从设备收到同步报文后,根据同步报文中的时间戳和主时钟到从时钟的线路延时计算出与主时钟的偏差,对本地的时钟进行调整[2]。 系统由各个单元的系统控制板(简称“系统板”)来完成同步的工作。同步模型与IEEE1588时钟协议一致,采用主从结构。主从单元采用相同频率的晶振,此时时钟同步的关键就是解决时钟相位对准问题和时钟漂移的问题。 系统中采用的时间同步算法,是借鉴IEEE1588的同步原理,主要是采用约定固定周期同步的算法。和IEEE1588同步算法一样,同步过程分为两个阶段: 延迟测量阶段和偏移测量阶段。下面以一主一从模式为例介绍其原理。 1.1 延迟测量 延迟测量阶段用来测量网络传输造成的延迟时间[3]。定义一个延迟请求信息包(Delay Request Packet) ,简称“Delay_Req”。延迟测量示意图。 图1 延迟测量示意图 为了简化程序,采用固定的周期测量网络延迟,一般系统每工作一个小时进行一次测量。从属时钟TSd 时刻发出延迟请求信息包Delay_Req ,主时钟收到Delay_ Req 后再立刻返回一个延时响应包delay_back发送给从属时钟,因此从属时钟就可以非常准确地计算出网络延时: TM2 →TS2∶Delay1 = TS2-Offset-TM2 TS3 →TM3∶Delay2 = TM3-(TS3 - Offset) 其中的Offset为从时钟与主时钟之间的时间偏差。 因为网络延迟时间是对称相等的,所以: Delay =(Delay1 + Delay2)/2=((TS2-TM2)+(TM3-TS3))/2 需要说明的是,在这个测量过程中,假设传输介质是对称均匀的,且线路是对称的[4]。
【CN109889784A】一种车载视频数据采集系统【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910131102.X (22)申请日 2019.02.21 (71)申请人 北京智能车联产业创新中心有限公 司 地址 100176 北京市大兴区荣华南路2号院 5号楼2002室 (72)发明人 倪鹏 毕超 党利冈 吴琼 (74)专利代理机构 北京辰权知识产权代理有限 公司 11619 代理人 刘广达 (51)Int.Cl. H04N 7/18(2006.01) H04N 21/4402(2011.01) (54)发明名称 一种车载视频数据采集系统 (57)摘要 本申请公开了一种车载视频数据采集系统, 包括:多个摄像头、控制器模块、通信模块、移动 边缘计算模块;所述多个摄像头,用于采集车内 和车周边的视频数据,并将采集到的视频数据传 输至控制器模块;所述控制器模块,用于将接收 到的视频数据传输至通信模块;所述通信模块, 用于将视频数据通过移动网络发送至移动边缘 计算模块;所述移动边缘计算模块,用于将接收 到的视频数据进行移动边缘计算,并将结果发送 至服务器。根据网络资源可用量确定视频数据转 码的比特率,对视频数据进行转码,得到转码后 的视频,发送至服务器,极大的减小了网络响应 用户请求的时延,同时降低了传输网和核心网部 分发生网络拥塞的可能性,极大地改善视频流传 输的效率问题。权利要求书2页 说明书4页 附图2页CN 109889784 A 2019.06.14 C N 109889784 A
权 利 要 求 书1/2页CN 109889784 A 1.一种车载视频数据采集系统,其特征在于,包括:多个摄像头、控制器模块、通信模块、移动边缘计算模块,其中,所述控制器模块分别与多个摄像头以及通信模块相连接; 所述多个摄像头,用于采集车内和车周边的视频数据,并将采集到的视频数据传输至控制器模块,包括:前向摄像头、后向摄像头、左前摄像头、左后摄像头、右前摄像头、右后摄像头、驾驶员行为摄像头、踏板摄像头,所述各摄像头通过各支架固定在车上,各所述摄像头分别与控制器模块电连接; 所述控制器模块,用于将接收到的视频数据传输至通信模块; 所述通信模块,用于将视频数据通过移动网络发送至移动边缘计算模块; 所述移动边缘计算模块,用于将接收到的视频数据进行移动边缘计算,并将结果发送至服务器。 2.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述前向摄像头通过支架固定于车辆前部,其视角中心轴的安装角度为沿竖直方向向下偏转,并与水平面的夹角在0-10°之间。 3.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述后向摄像头通过支架固定于车辆尾部,其视角中心轴的安装角度为沿竖直方向向下偏转,并与水平面的夹角在0-10°之间。 4.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述左前摄像头通过支架固定在车辆前部左轮上方,面向左前轮,其视角中心轴在车辆长度方向铅垂面上的投影与水平面的夹角在0-20°之间,左前摄像头的视角中心轴在水平面上的投影与车辆长度方向所在的铅垂面的夹角在10-70°之间。 5.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述右前摄像头通过支架固定在车辆前部右轮上方,面向右前轮,其视角中心轴在车辆长度方向铅垂面上的投影与水平面的夹角在0-20°之间,右前摄像头的视角中心轴在水平面上的投影与车辆长度方向所在的铅垂面的夹角在10-70°之间。 6.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述左后摄像头通过支架固定在车辆尾部左轮上方,面向左后轮,其视角中心轴在车辆长度方向铅垂面上的投影与水平面的夹角在0-20°之间,左后摄像头的视角中心轴在水平面上的投影与车辆长度方向所在的铅垂面的夹角在10-70°之间。 7.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述右后摄像头通过支架固定在车辆尾部右轮上方,面向右后轮,其视角中心轴在车辆长度方向铅垂面上的投影与水平面的夹角在0-20°之间,右后摄像头的视角中心轴在水平面上的投影与车辆长度方向所在的铅垂面的夹角在10-70°之间。 8.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述驾驶员行为摄像头通过支架固定在车辆右前挡风窗玻璃上,所述驾驶员行为摄像头的视角中心轴的安装角度为沿竖直方向向下偏转,并与水平面的夹角在10-30°之间。 9.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述踏板摄像头通过支架固定于车辆驾驶员座椅上,踏板摄像头的视角中心轴的安装角度为沿竖直方向向下偏转,并与水平面的夹角在0-10°之间。 10.如权利要求1所述的一种车载视频数据采集系统,其特征在于,所述移动边缘计算 2
通用大数据采集系统操作流程
通用税务数据采集软件的操作 目录 海关完税凭证发票(进口增值税专用缴款书)的操作流程 (1) 一、海关凭证抵扣,在通用数据采集软件里,分6步操作 (1) 二、以上6个步骤的具体说明 (1) 三、常见问题 (4) 铁路运输发票的操作流程 (6) 一、运输发票抵扣,在通用数据采集软件里,分6步操作 (6) 二、以上6个步骤的具体说明 (6) 三、常见问题 (9)
海关完税凭证发票(进口增值税专用缴款书)的操作流程 一、海关凭证抵扣,在通用数据采集软件里,分6步操作: 1、下载安装软件到桌面 2、打开软件第一步‘新增企业’(录入公司的税号和全称) 3、软件里第二步‘新增报表’(设置申报所属期) 4、软件里第三步‘纵向编辑’(录入发票内容) 5、软件里第四步‘数据申报’(把录入的内容生成文件,便于上传国税申报网) 6、国税申报网上传录入的发票数据(第5点‘数据申报’生成的文件上传) 二、以上6个步骤的具体说明 1、下载安装软件到桌面 进入申报网页htt://100.0.0.1:8001—服务专区“软件下载”—通用税务数据采集软件2.4(一般纳税人版)右键目标另存为—ty24双击安装—安装完成桌面上出现图标 2、打开软件第一步‘新增企业’(录入公司的税号和全称)
进入通用税务数据采集软件后,点击‘新增企业’,输入本企业的税号与公司名称,输完后点击确定。 3、软件里第二步‘新增报表’(设置申报所属期) 鼠标左键点左边”目录”-“海关完税凭证抵扣清单”,点中后,右键点“新增报表”或点击上方的新增报表,所属区间就是选企业要抵扣的月份,选好后点击确定 4、软件里第三步‘纵向编辑’(录入发票内容) 点新增企业下方的“纵向编辑”,弹出“记录编辑”窗口,同一条记录要录入两次发票信息,第一次录入发票信息,全部填好后,点保存并新增,弹出” 数据项目确认”的窗口,第二次录入发票信息。 ●第一次发票录入信息详细说明如下:
数据库同步技术解决方案.doc
数据库同步技术解决方案 ----数据库发布订阅SqlServer数据库同步是项目中常用到的环节,若一个项目中的数据同时存在于不同的数据库服务器中,而这些数据库需要被多个不同的网域调用时,配置SqlServer数据库同步是个比较好的解决方案。SqlServer数据库同步的配置比较烦锁,下面对其配置详细步骤进行介绍: 一、数据复制前提条件 1. 数据库故障还原模型必需为完全还原模型。 2. 所有被同步的数据表都必须要用主键。 3. 发布服务器、分发服务器和订阅服务器必须使用计算机名称来进行SQLSERVER服务器的注册。 4. SQLSERVER必需启动代理服务,且代理服务必需以本地计算机的帐号运行。 二、解决前提条件实施步骤 1. 将数据库故障还原模型调整为完全还原模型。具体步骤如下: 打开SQLSERVER企业管理器>选择对应的数据库>单击右键选择属性.>选择”选项”>恢复模式选‘完整’。 2. 所有被同步的数据表都必须要有主键。(主要指事务复制)如果没有主键的数据表,增加一个字段名称为id,类型为int 型,标识为自增1的字段。 3. 发布服务器、分发服务器和订阅服务器必须使用计算机名称来进行SQLSERVER服务器的注册。 在企业管理器里面注册的服务器,如果需要用作发布服务器、分发服务器和订阅服务器,都必需以服务器名称进行注册。不得使用IP地址以及别名进行注册,比如LOCAL, “.”以及LOCALHOST等。
4.如果非同一网段或者远程服务器,需要将其对应关系加到本地系统网络配置文件中。文件的具体位置在%systemroot%\system32\drivers\etc\hosts 配置方式: 用记事本打开hosts文件,在文件的最下方添加IP地址和主机名的对应关系。如图:
时间同步在分布式数据采集系统中的实现
邮局订阅号:82-946360元/年技术创新 数采与监测 《PLC 技术应用200例》 您的论文得到两院院士关注 时间同步在分布式数据采集系统中的实现 The Implementation of the time synchronization in the distributed data collection system (空军工程大学) 徐锋樊晓光刘东 XU Feng FAN Xiao-guang LIU Dong 摘要:文中介绍了分布式数据采集系统中精确时间同步的实现方法以及相应的测试结果。该设计方案以IEEE1588标准中的精确时间协议(PTP)为基础,通过使用美国国家半导体公司生产的以太网物理层控制芯片DP83640,使得采用以太网架构的分布式数据采集系统主从节点上的时钟达到精确的时间同步。关键词:精确时间同步;IEEE1588;DP83640中图分类号:TP393文献标识码:A Abstract:The implementation of precise time synchronization in the distributed data collection system and test results is illuminated in this article.By use of DP83640Ethernet PHYTER produced by the National Semiconductor corporation,the design is based on the Precise Time Protocol (PTP)of the IEEE1588standard,and finally implemented the precise time synchronization between the master clock and slave clocks of the distributed data collection system based on standard Ethernet.Key words:precise time synchronization;IEEE1588;DP83640 文章编号:1008-0570(2009)11-1-0091-02 1引言 分布式数据采集系统广泛应用于采集数据多、实时性要求 较高的现场测控领域。 因此,分布式数据采集系统中的一个关键技术就是实现数据的同步传输。但由于网络传输延迟以及晶振频率漂移的原因,如果仅仅在系统启动时进行一次同步,状态数据的同步传输将会随着系统运行时间的增长而失步,因而不能够对系统的全局状态获得准确的掌握。 随着以太网技术逐渐应用于工业自动化测控领域,2002年国际电气和电子工程师协会(IEEE)发布了IEEE1588标准,该标准中的精确时间协议(Precise Time Protocol,简称PTP 协议)定义了一个以太网模式下的时间同步协议,主要应用在分布式测量和控制系统中,目的是提高工业以太网的实时性,使运行于各个独立测控节点上的时钟在系统范围内达到一个较高的同步精度。 本文以IEEE1588标准中的PTP 协议为基础,通过使用以太网物理层控制芯片DP83640,在分布式数据采集系统中实现了精确的时间同步。 2分布式数据采集系统概述 图1分布式数据采集系统结构图 分布式数据采集是带传感器的多个微计算机节点借助现 场总线或工业以太网连接在一起的分布式工业测控系统。传感器采用输出温度、压力、流量、位移等模拟量,再通过模数转换所生成数字量并由微计算机独立地进行处理,最后将局部的处理结果传输到总控单元上进行集中分析处理并得出全局状态的实时信息。拓扑结构如图1所示。 3IEEE1588标准和PTP 协议概述 IEEE1588标准的技术基础最初来源于安捷伦公司,是由安捷伦实验室的John C.Edison 以及来自其它公司和组织的12名成员共同研究的。经过多次修改后于2002年由国际电气和电子工程师协会(IEEE)正式发布。IEEE1588标准全称是:网络测量和控制系统的精密时钟同步协议标准。它定义一种在分布式测量和控制系统中实现高精度时钟同步的精确时间协议PTP 。该协议能够在所有支持多播的网络上实现,特别适合于以太网,但并不局限于以太网,目的是使分布式网络中的所有时钟保持精确的同步。 PTP 协议是一个关于时钟同步的协议标准,它被应用于由多个节点组成的分布式系统中,在系统中每个节点代表一个独立运行的时钟。PTP 协议将整个网络内的时钟分为普通时钟(ordinary clock)和边界时钟(boundary clock),而从通信关系上看又可把时钟分为主时钟(master clock)和从时钟(slave clock),整个系统中的最优时钟为最高主时钟(grandmaster clock),系统只能有一个最高主时钟,而一个PTP 协议的通信子网中只能有一个主时钟,从时钟与主时钟保持同步。 PTP 协议在现有的UDP/IP 协议基础之上实现局域网架构内的时钟同步,有关同步信息的协议报文共有4种,分别是:同步报文Sync,跟随报文Follow_up,延迟请求报文Delay_req,延迟应答报文Delay_Resp 。 PTP 协议的同步过程分为两个阶段:偏移(offset)测量阶段和延迟(Delay)测量阶段。 偏移阶段的工作是修正主时钟和从时钟之间的时间偏差。 徐锋:硕士研究生 91--
适用于MES的分布式数据采集方案
制造现场的分布式数据收集 解决方案 泽朗电子
简介 ◆随着工业自动化和客户需求的不断提高,基于MES的工业自动化数据采集和控制 以及产品的可追溯性系统越来越多的在各大工厂推广应用,这类系统都需要对生产过程的每个环节进行精确的监测、数据采集、记录和控制,这需要生产设备能通过工业网络及时、准确的报告各项状态和数据。 ◆基于以太网的数据收集节点可以直接、准确、准时、安全、稳定的把各个流程节 点的数据传送到中央数据服务器,而不必使用成本高、维护困难、软件和系统都不稳定的工业计算机,也不用担心计算机病毒对生产制造造成巨大损失。 ◆泽朗电子拥有齐全的适用于工业自动化生产的数据收集设备产品线和系统集成能 力,全心全意的服务于您的要求。
应用场景 数据集传器应用在生产线上每个需要收集数据的节点,对于 MES系统和产品追溯用系统,用于收集产品进入工序的时间等 信息和产品编号条码/部件编号条码等信息。
网络拓扑 WEB服务器 网络交换机 TN-03A 数据集传器 用于配置和监控的PC LAN LAN LAN 网络交换机 TN-03A 生产线A生产线B
我们的数据集传器产品线产品型号: TN-03AW 相对于 TN-03A ,添加Wi-Fi 联网支持。 产品型号:TN-03A 用于接收设备传感器或条码扫描头的数据,集成USB 接口和RJ45网口, 可以把数据和自定义按钮事件通过以太网直接上传至应用服务器,并回显从服务器返回的执行结果。 基于Alliwinner H3高性能处理器 支持Wi-Fi (IEEE 802.11 b/g/n)
系统软件架构 生产设备 DATA TRANSPORTER APP HAL USB Ethernet LwIP Linux OS WEB APP JavaEE Server Database Linux OS Ethernet DATA TRANSPORTER APPLICATION SERVER I/Os 数据采集设备