考场安排操作步骤

目录
第一节前期准备 (1)
第二节考场安排操作步骤 (2)
第三节分数合并操作步骤 (2)
第四节成绩导出核对操作步骤 (3)
第五节学生名册导出操作步骤 (4)
第六节流程图 (5)
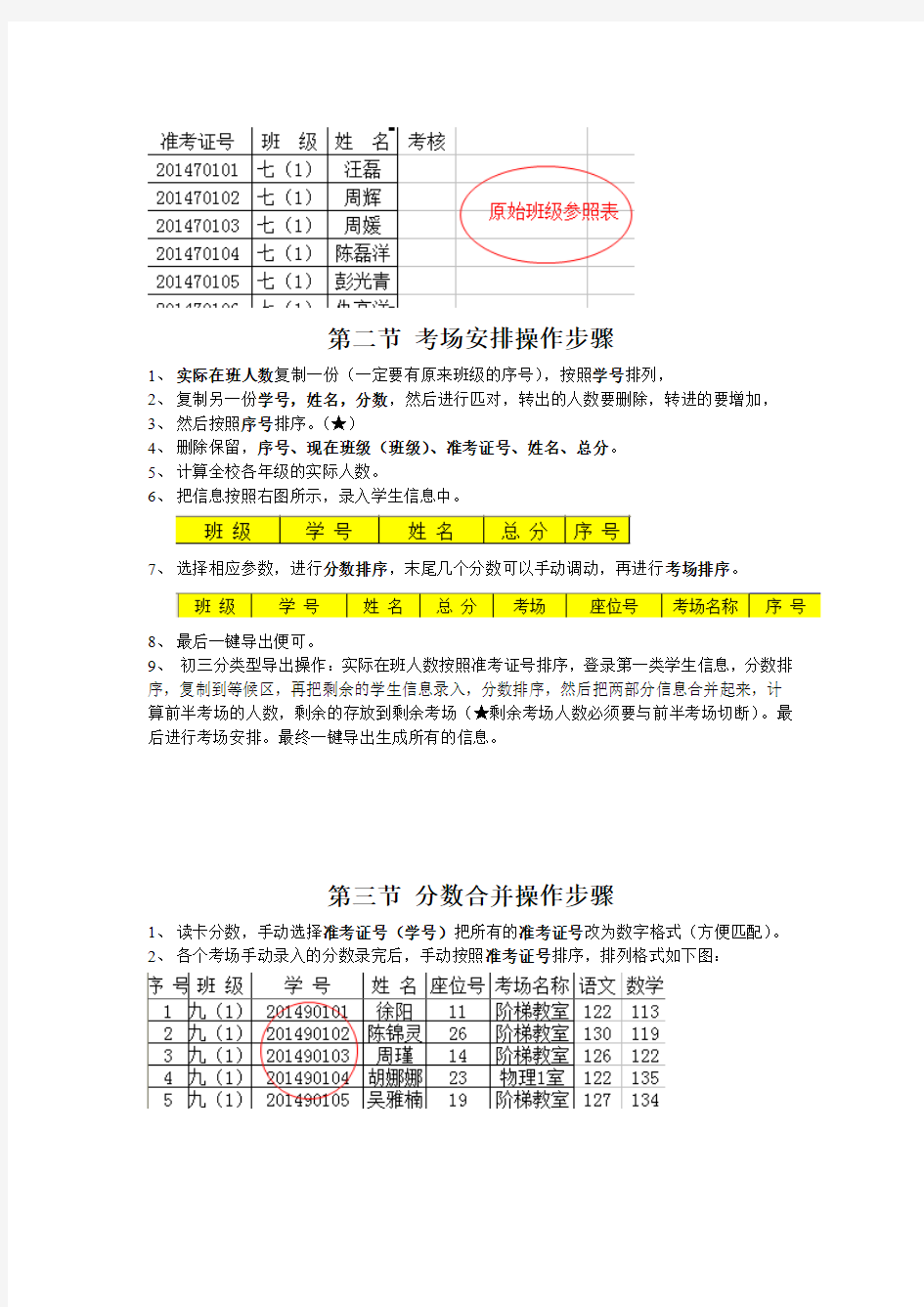
第一节前期准备
人数复制一份(一定要有原来班级的序号),按照学号排列,
复制另一份学号,需要准备两个表,一个是原始考核表,即是当初参加分班的所有人员,排序按照学号,方便考核使用;另外一个表是在班人数表,去掉不在班级的人数,排序按照现在班级,可以使用序号进行辅助。附:
第二节考场安排操作步骤
1、实际在班人数复制一份(一定要有原来班级的序号),按照学号排列,
2、复制另一份学号,姓名,分数,然后进行匹对,转出的人数要删除,转进的要增加,
3、然后按照序号排序。(★)
4、删除保留,序号、现在班级(班级)、准考证号、姓名、总分。
5、计算全校各年级的实际人数。
6、把信息按照右图所示,录入学生信息中。
7、选择相应参数,进行分数排序,末尾几个分数可以手动调动,再进行考场排序。
8、最后一键导出便可。
9、初三分类型导出操作:实际在班人数按照准考证号排序,登录第一类学生信息,分数排序,复制到等候区,再把剩余的学生信息录入,分数排序,然后把两部分信息合并起来,计算前半考场的人数,剩余的存放到剩余考场(★剩余考场人数必须要与前半考场切断)。最后进行考场安排。最终一键导出生成所有的信息。
第三节分数合并操作步骤
1、读卡分数,手动选择准考证号(学号)把所有的准考证号改为数字格式(方便匹配)。
2、各个考场手动录入的分数录完后,手动按照准考证号排序,排列格式如下图:
第四节成绩导出核对操作步骤
1、登分表是以准考证号由小到大排序
2、班级为现在班级,如果想使用原始班级,请使用另一个工具导出,班级为原始班级。
3、手工删除座位号和考场名称两列
4、复制整张表放入工具成绩登入表中即可,成绩导出核对,学生
名册选择否即可,不选也行(默认为否),选择好相关信息,导出
即可。
注:到处后根目录下有两类文件,总表和分表,方便成绩分发。
第五节学生名册导出操作步骤
1、导入格式如右图:
2、班级为现在班级,如果想使用原始班级,请使用另一个工具导出,班级为原始班级。
3、学生名册选择是即可,其他相关信息随便选择即可,但是必须要选,导出即可。注:到处后根目录下有两类文件,总表和分表,方便成绩分发。
第六节评分表生成操作步骤
1、打开各班考核人数表,复制登分表中的项目
2、学号匹配,找出不存在的学生,插入一行,如图2
3、分数替代(上下加除以2),改分,扣分等操作。
4、按照考核降序排列,新建复制表,删除不考核人员
5、剩余的再按照学号升序排(以上步骤智能化的操作正在开发中,敬请期待。。)
6、复制所有的成绩格式如图,注:班级必须是原始考核班级
7、按照操作说明填写相关要求,最后写入数据,并且一键导出数据即可
.
第六节 流程图
信息录入
打印
*1
复制
打印
成绩导 出核对工具
成绩导出核对工具
(操作步骤详见 另外一张表)
汽车文化期末考试a卷答案)
贵州城市职业学院2014—2015学年度第二学期 本大题得() 分 一、单选题(每题2分,共20分) 1. 1765年英国人(A )发明了蒸汽机。 A.瓦特 B. 福特 C ?卡尔?本茨 D.古诺 2. 属于中国汽车自主品牌的是:(A ) A.红旗 B. 福特C .大众D. 起亚 3. 采用人字齿轮形状作为公司标志的汽车公司是:(C ) A.法国标致 B. 德国大众 C .法国雪铁龙 D.韩国现代 4. 第一家采用流水线生产方式的汽车企业是(B )。 A.奔驰 B. 福特 C .法拉利 D.丰田 5. 活塞位于(A )内 A.气缸 B. 曲轴箱 C .空气滤清器 D.飞轮 6. VIN 车辆识别代码共有(B )位 A. 15 B. 17 C . 20 D. 25 7. 柴油机是由(B )发明的 A.奥托 B. 狄塞尔 C .雷诺尔 D. 古诺 8. “多功能汽车”的英文简写是(B ) A. SUV B. MPV C . 4WD D. RV 9. 斯巴鲁SUBAR 的含义是(A ) A.昂星宿 B. 龙卷风 C .流星 D.银河系 10. 东风汽车标记是一对(B ) A.树叶 B. 飞燕 C .鱼鳍 D.羽毛 : 号位座 :名姓 :号学 :级班 ? ? 业专《汽车文化》期末考试(A ) 试卷命题人:王丰 任课老师:王丰
本大题得()分 二、填空题(每空1分,共30分) 1.汽车史上的四次大变革是:第一次流水线生产方式_______ 、第二次汽车产品多样 性 _____ 、第三次精益的生产方式、第四次汽车工业走向世界。 2.至1966年,我国汽车工业已形成第一汽车制造厂、南京汽车制造厂、上海汽车制造厂、济南汽车制造厂、北京汽车制造厂五个汽车生产基地,基本填补了汽车类型的空白。 3.汽车的主要性能指标有动力性、燃油经济性、制动性、操纵稳定性、行驶平顺性、 排放污染物和噪声。 4.汽车主要是由发动机、底盘、车身、电气设备四大部件组成。 5.四冲程汽油机的一个工作循环包括四个行程,进气、压缩、做功、排气。 6.按传动介质分,汽车传动系的形式有机械传动、液力传动、液压传动、电传动。 7.两位德国人卡尔?本茨、戈特利布?戴姆勒被誉为现代汽车之父。 8.确定汽车外形有三个因素,包括机械工程学、人机工程学、空气动力学。 本大题得()分 三、判断题(只判断正误)(每题1分,共10分) 1.在我国,拖拉机和摩托车属于汽车的范畴。(x ) 2.按我国规定,中型客车的车长划分为 3.5米v L V 7米。(x ) 3.美国福特汽车公司生产出T型车,又在世界上首推流水线装配汽车的方式。(V ) 4.发动机由曲轴连杆机构、配气机构、燃料供给系、传动系、润滑系、冷却系、和起动系组 成。(x ) 5.宝马的英文缩写是BMU (X )
空间后方交会编程实习报告
空间后方交会编程实习报告 一实习目的 用程序设计语言(Visual C++或者C语言)编写一个完整的单片空间后方交会程序,通过对提供的试验数据进行计算,输出像片的外方位元素并评定精度。本实验的目的在于让学生深入理解单片空间后方交会的原理,体会在有多余观测情况下,用最小二乘平差方法编程实现解求影像外方位元素的过程。通过上机调试程序加强动手能力的培养,通过对实验结果的分析,增强学生综合运用所学知识解决实际问题的能力。 二实习内容 利用一定数量的地面控制点,根据共线条件方程求解像片外方位元素。 三实习数据 已知航摄仪的内方位元素:f k =153.24mm,x =y =0.0mm,摄影比例尺为1:50000; 4个地面控制点的地面坐标及其对应像点的像片坐标: 四实习原理 如果我们知道每幅影像的6个外方位元素,就能确定被摄物体与航摄影像的关系。因此,如何获取影像的外方位元素,一直是摄影测量工作者所探讨的问题。可采取的方法有:利用雷达、全球定位系统(GPS)、惯性导航系统(INS)以及星相摄影机来获取影像的外方位元素;也可以利用影像覆盖范围内一定数量的控制点的空间坐标与摄影坐标,根据共线条件方程,反求该影像的外方位元素,这种方法称为单幅影像的空间后方交会。 单像空间后方交会的基本思想是:以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的外方位元素Xs,Ys,Zs,t,w,k。 五实习流程 (1)获取已知数据。从摄影资料中查取影像比例尺1/m,平均摄影距离(航空摄影的航高、内方位元素x0,y0,f;获取控制点的空间坐标Xt,Yt,Zt。 (2)量测控制点的像点坐标并进行必要的影像坐标系统误差改正,得到像点坐标。 (3)确定未知数的初始值。单像空间后方交会必须给出待定参数的初始值,在竖直航空摄影且地面控制点大体对称分布的情况下,可按如下方法确定初始值:
空间后方交会的解算
空间后方交会的解算 一. 空间后方交会的目的 摄影测量主要利用摄影的方法获取地面的信息,主要是是点位信息,属性信息,因此要对此进行空间定位和建模,并首先确定模型的参数,这就是空间后方交会的目的,用以求出模型外方位元素。 二. 空间后方交会的原理 空间后方交会的原理是共线方程。 共线方程是依据相似三角形原理给出的,其形式如下 111333222333()()() ()()() ()()()()()()A S A S A S A S A S A S A S A S A S A S A S A S a X X b Y Y c Z Z x f a X X a Y Y a Z Z a X X b Y Y c Z Z y f a X X a Y Y a Z Z -+-+-=--+-+--+-+-=--+-+- 上式成为中心投影的构线方程, 我们可以根据几个已知点,来计算方程的参数,一般需要六个方程,或者要三个点,为提高精度,可存在多余观测,然后利用最小二乘求其最小二乘解。 将公式利用泰勒公式线性化,取至一次项,得到其系数矩阵A ;引入改正数(残差)V ,则可将其写成矩阵形式: V AX L =- 其中 111333222333[,]()()()()()()()()()()()()()()T x y A S A S A S x A S A S A S A S A S A S y A S A S A S L l l a X X b Y Y c Z Z l x x x f a X X a Y Y a Z Z a X X b Y Y c Z Z l y y y f a X X a Y Y a Z Z =-+-+-=-=+-+-+--+-+-=-=+-+-+- 则1()T T X A A A L -= X 为外方位元素的近似改正数, 由于采用泰勒展开取至一次项,为减少误差,要将的出的值作为近似值进行迭代,知道小于规定的误差 三. 空间后方交会解算过程 1. 已知条件 近似垂直摄影
汽车文化期末考试题及答案
江西省井冈山经贸学校2014—2015第二学期 15汽修(3)班《汽车文化》期末考试题 注意事项: 1、考生应严格遵守考场规则,得到监考人员指令后方可答题。 2、考生拿到试卷后应首先填写密封线内各项内容(准考证号、姓名、学校),不得填出密封线外,同时把座位号填写在试卷右上角座位号栏内。 3、用蓝、黑色圆珠笔或钢笔把答案直接写在试卷上。 4、注意字迹清楚,保持卷面整洁。 5、考试结束将试卷放在桌上,不得带走。待监考人员收毕清点后,方可离场。 一、填空题 :(每小题 1 分,共计 20 分) 1、 汽车诞生在 年。 2、 世界上第一条汽车流水装配线是在 国。 3、 被誉为赛车之父的是 。 4、 德国奥迪汽车公司原来是由 家公司合并而成。 5、 发明子午线轮胎的公司是 。 6、 中国唯一符合FIA 国际标准的F1赛道在 。 7、 世界上最著名的勒曼24小时汽车耐力赛举办地点是在 。 8、 世界上累计产量最高的汽车是 。 9、 SUV 是 汽车。 10、 现代汽车鼻祖是本茨及 。 11、 世界上最大的汽车城是美国的 。 12、 宝马的英文缩写名称是 。 13、 客车的车辆类别代号是 。 14、 我国汽车报废标准规定,家用轿车的使用年限为 年。 15、 VIN 车辆识别代码共有 位。 16、 汽油的辛烷值越高,其 越好。 17、 自动变速器上N 代表 。 18、 排气管“放炮”的主要原因有 。 19、 电控汽油机大多采用 点喷射。 20、 最新的汽车分类标准将汽车分成 商用车和 车两大类。 二、单选题 :(每题 2 分,共计 60 分) 1的驱动形式是 。 A 、FR B 、FF C 、RR 2、 兰博基尼在创建初期生产什么 。 A 、飞机 B 、农用机械 C 、自行车 3、 最注重汽车安全性的汽车厂商是 汽车公司 。 A 、沃尔沃 B 、奔驰 C 、通用 4、 ABS 是 的缩写。 A 、 全球卫星定位系统 B 、电子防抱死制动系统 C 、汽车驱动防滑驱动系统 5、 GPS 是 A 的缩写。 A 、 全球卫星定位系统 B 、全球监测系统 C 、全球导航系统 6、 保时捷的创立者,甲壳虫的设计者是 。 A 、 菲迪南德.波尔舍 B 、菲迪南德.雷诺 C 、菲迪南德.费雷 7、 舒马赫夺得过 F1冠军 。 A 、 6 B 、5 C 、7 8、 转子发动机的发明人的国籍是 。 A 、日本 B 、德国 C 、 美国 9、 F1大奖赛全年共有 站。 A 、17 B 、16 C 、15 10、 ESP 是 的缩写。 A 、主动式车身悬挂系统 B 、电子动态稳定系统 C 、电子感应刹车控制系统 11、“MPV ”是 的英文缩写。 A 、高级房车 B 、运动型多用途车 C 、多用途厢式车 12、奥兹莫比尔是 汽车公司的品牌。 A 、克莱斯勒 B 、通用 C 、奥迪 13、Seat 品牌属于 国家。 A 、美国 B 、意大利 C 、西班牙 14、第一个ABS 系统的制造商是 。 A 、博世 B 、西门子 C 、德尔福 15、最早的电动汽车 。 A 、1847年,美国的法莫(M.Farmer)制造了第一辆无导轨蓄电池为动力的电动汽车 B 、1880年,法国的卡米?福尔最先制造出利用蓄电池作动力的、实用的电动汽车、 C 、 ,中国武汉理工大学研制的混合动力电动汽车 16、我国生产的第一辆汽车叫 。 A 、民生牌 B 、 民族牌 C 、民权牌 学校: 班级: 姓名: 学号: 身份证号: ……………………………装………………………订………………………线…………………………………
摄影测量后方交会
单张相片后方交会
目录 ●作业任务 (3) ●解算原理 (3) ●具体过程 (4) ●算法描述及程序流程 (4) ●计算结果 (7) ●结果分析 (8) ●心得体会及建议 (8) ●参考文献 (9)
一,作业任务 已知摄影机主距f=153.24mm,四对点的像点坐标与相应地面坐标列入下表: 表1-1 计算近似垂直摄影情况下后方交会解。 二,解算原理 【关键词1】中心投影构像方程 在摄影测量学中,最重要的方程就是中心投影构像方程(图2-1)。这个方程 将地面点在地面摄影测量坐标系中的坐标(物方坐标)和地面点对应像点的像平 面坐标联系起来。在解析摄影测量与数字摄影测量中是极其有用的。在以后将要 学习到的双像摄影测量光束法、解析测图仪原理及数字影像纠正等都要用到该 式。 图2-1 在上述公式中:x和y分别为以像主点为原点的像点坐标,相应地面点坐标 为X,Y,Z,相片主距f以及外方位元素Xs,Ys,Zs,ψ,ω,κ。 而在此次作业中,就是已知四个地面控制点的坐标以及其对应的像点坐标, 通过间接平差原理来求解此张航片的外方位元素。 【关键词2】间接平差 在一个平差问题中,当所选的独立参数X的个数等于必要观测值t时,可将 每个观测值表达成这t个参数的函数,组成观测方程,然后依据最小二乘原理求 解,这种以观测方程为函数模型的平差方法,就是间接平差方法 间接平差的函数模型为: 随机模型为: 平差准则为:VtPV=min 【关键词3】单像空间后方交会 利用至少三个已知地面控制点的坐标A(Xa,Ya,Za)、B(Xb,Yb,Zb)、Z(Xc,
Yc,Zc),与其影像上对应的三个像点的影像坐标a(xa,ya)、b(xb,yb)、c(xc,yc),根据共线方程,反求该像点的外方位元素Xs,Ys,Zs,ψ,ω,κ。这种解算方法是以单张像片为基础,亦称单像空间后方交会。 在此次作业中,就是已知四个控制点在地面摄影测量坐标系中的坐标和对应的像点坐标。由此可以列出8个误差方程,存在两个多余观测数,则n=2。故可利用间接平差里,依据最小二乘法则,进行求解。由于共线条件方程是非线性函数模型,为了便于计算,需把非线性函数表达式用泰勒公式展开成现行形式,即“线性化”。而又因为仅取泰勒级数展开式的一次项,未知数的近似值改正是粗略的,所以必须计算采用逐渐趋近法,解求过程需要反复趋近,直至改正值小于限差为止。 三,具体过程 1,获取已知点数据:从摄影资料中查取像片比例尺1/m,平均航高,内方元素x0,y0,f;从外业测量成果中,获取控制点的地面测量坐标Xt,Yt,Zt,并转换成摄影测量坐标X,Y,Z。 2,量测控制点的像点坐标:将控制点标刺在像片上,利用立体坐标量测仪量测控制点的像框坐标,并经像点坐标改正,得到像点坐标x,y。 3,确定未知数的初始值:在竖直摄影测量情况下,角元素的初始值为0,及ψ=ω=κ=0; 线元素中,Zso =m*f+(Z[0]+Z[1]+Z[2]+Z[3])/4,Xso,Yso的取值可用四个角点上制点坐标的平均值,即:Xso=(X[0]+X[1]+X[2]+X[3])/4;Yso=(Y[0]+Y[1]+Y[2]+Y[3])/4;4,计算旋转矩阵R:利用角元素的近似值计算方向余弦,组成R阵。公式如下:R[0][0]=cos(ψ)*cos(k)-sin(ψ)*sin(w)*sin(k); R[0][1]=-cos(ψ)*sin(k)-sin(ψ)*sin(w)*cos(k); R[0][2]=-sin(ψ)*cos(w); R[1][0]=cos(w)*sin(k); R[1][1]=cos(w)*cos(k); R[1][2]=-sin(w); R[2][0]=sin(ψ)*cos(k)+cos(ψ)*sin(w)*sin(k); R[2][1]=-sin(ψ)*sin(k)+cos(ψ)*sin(w)*cos(k); R[2][2]=cos(ψ)*cos(w); 5,逐点计算像点坐标的近似值:利用未知数的近似值按共线方程计算控制点像点坐标的近似值(x)、(y); 6,组成误差方程式:参照教材(5-8)式、(5-9b)式、(5-4)式逐点计算误差方程的系数阵和常数项。 7,组成法方程:计算法方程的系数矩阵与常数项。 8,解求外方位元素:根据法方程,按间接平差原理解求外方位元素改正值,并与相应的近似值求和,得到外方位元素的新的近似值。 9,检查计算是否收敛:将求得的外方位元素的改正值与规定的限差比较,小于限差则计算终止,否则用新的近似值重复第4至第8步骤计算,直至满足要求为止。 四,算法描述及程序流程。 算法描述(图4-1):
汽车文化试卷及答案
2017—2018第一学期 17春汽修班《汽车文化》期末考试题 注意事项: 1、考生应严格遵守考场规则,得到监考人员指令后方可答题。 2、考生拿到试卷后应首先填写密封线内各项内容(准考证号、姓名、学校),不得填出密封线外,同时把座位号填写在试卷右上角座位号栏内。 3、用蓝、黑色圆珠笔或钢笔把答案直接写在表格里。 4、注意字迹清楚,保持卷面整洁。 5、考试结束将试卷放在桌上,不得带走。考试时间90分钟。 判断题: 选择题: 一、判断题 :(每题 2 分,共计 40 分) 1、F1赛车发动机的冷却是靠水来冷却的。 ( ) 2、美国通用汽车公司创建于1908,创建人是威廉.C 杜兰特 ( ) 3、大众汽车公司主要有大众和奥迪两大品牌。 ( ) 4、本次和戴姆勒发明的汽车都采用柴油机 ( ) 5、1895年,法国的米其林兄弟制造出了用于汽车的充气轮胎 ( ) 6、美国第一大汽车公司是福特汽车公司 ( ) 7、福特汽车公司生产的T 型汽车是世界第一条流水线装配而成的汽车。 ( ) 8、爬坡试验包括最大爬坡度与爬长坡以及动力三项试验。 ( ) 9、德国工程师卡尔本次发明了在世界上第一辆摩托车。 ( ) 10、世界上第一辆吉普车是由美国班特姆公司制造。 ( ) 11、汽车是用内燃机作为动力,主要在公路上或马路上行驶的交通工具,通常有4个或4个以上的橡胶轮胎,用来运载人或货物。 ( ) 12、汽车电气设备由车身和发动机组成。 ( ) 13、1956年7月,国产第一辆“解放”牌4t 载货汽车在第一汽车制造厂诞生。“一汽”也因此被誉为中国汽车工业的摇篮。 ( ) 14、所有的宝马轿车都是后轮驱动。 ( ) 15、马自达以其辉煌的技术创新历史而自豪,尤其以转子发动机为代表。 ( ) 16、汽车噪音的主要来源有两个方面,一是发动机,另一个是喇叭。 ( ) 17、太阳能汽车使用太阳能电池把光能转化成电能储存在蓄电池中,用蓄电池来推动汽车。( ) 18、白色的汽车发生交通事故的几率远高于黑色汽车。 ( ) 19、未来小客车的造型必然是在鱼形车的基础上加以改进。 ( ) 20、方程式汽车赛项目只有F1。 ( ) 二、选择题 :(每题2分,共计40 分) ( )。 A 、凯迪拉克 B 、地球 C 、水星 D 、 雪佛兰 2.( )成功地创造了一整套现代公司组织管理体系。 A 、 阿尔佛雷德 斯隆 B 、 丰田喜一郎 C 、 威廉 杜兰特 D 、威廉姆 迈巴赫 3.我国第一辆轿车是( )。 A 、红旗CA770高级轿车 B 、解放牌轿车 C 、SH760中级轿车 D 、东风牌轿车 年一级方程式汽车大赛中国大奖赛在( )赛道举行。 A 、北京 B 、上海 C 、广州 D 、大连 5.世界上最早组织汽车比赛的国家是( )。 A 、法国 B 、英国 C 、美国 D 、中国 年美国克莱斯勒的( )小客车,首次采用流线形车身。 A 、气流牌 B 、和风牌 C 、甲壳虫 D 、顺风牌 7.汽车排放造成的大气污染会破坏( ),从而造成太阳辐射过强,也会导致出现高温天气。 A 、臭氧层 B 、对流层 C 、大气层 D 、电离层 8.氢气汽车指用( )的汽车 学校: 班级: 姓名: 学号: 身份证号: ……………………………装………………………订………………………线…………………………………
全站仪后方交会法步骤和高程测量步骤
全站仪后方交会法步骤和 高程测量步骤 Revised final draft November 26, 2020
1、角度测量(angleobservation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB,则: 1)当精度要求不高时: 瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。 2)当精度要求高时:——可用测回法(methodofobservationset)。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。 2、距离测量(distancemeasurement) PSM、PPM的设置——测距、测坐标、放样前。 1)棱镜常数(PSM)的设置。 一般:PRISM=0(原配棱镜),-30mm(国产棱镜) 2)大气改正数(PPM)(乘常数)的设置。 输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。 (1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”(MEAS)。 3、坐标测量(coordinatemeasurement) (1)功能:可测量目标点的三维坐标(X,Y,H)。 (2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已
知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。。。 若输入:方位角,测站坐标(,);测得:水平角和平距。则有: 方位角: 坐标: 若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有: 高程: (3)方法: 输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。 4、点位放样(Layout) (1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。 (2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值dD和角度差dHR或纵向差值ΔX和横向差值ΔY。 3)根据显示的dD、dHR或ΔX、ΔY,逐渐找到放样点的位置。
《汽车文化》期末考试题及答案
江西省井冈山经贸学校2015—2016第二学期 16春汽修一班《汽车文化》期末考试卷 注意事项: 1、考生应严格遵守考场规则,得到监考人员指令后方可答题。 2、考生拿到试卷后应首先填写密封线内各项内容(准考证号、姓名、学校),不得填出密封线外,同时把座位号填写在试卷右上角座位号栏内。 3、用蓝、黑色圆珠笔或钢笔把答案直接写在表格里。 4、注意字迹清楚,保持卷面整洁。 5、考试结束将试卷放在桌上,不得带走。考试时间90分钟。 判断题: 选择题: 一、判断题 :(每题 2 分,共计 40 分) 1、目前我国汽车产量居全球第八位。( ) 2、F1车赛的正式比赛是安排在星期六举行。( ) 3、目前全球最大的汽车公司是德国大众汽车公司。( ) 4、SUV 汽车的出现是汽车发展史上第六座里程碑。( ) 5、甲壳虫汽车是德国大众汽车公司的费迪南德.波尔舍博士设计出来的。( ) 6、日本最大的汽车公司是丰田汽车公司。( ) 7、世界上第一台蒸汽机汽车是英国人瓦特发明的。( ) 8、中高级轿车是目前世界上产量最大,保有量也最大的轿车。( ) 9、英国劳斯莱斯汽车公司的车标是飞翔女神。( ) 10、现代化交通运输包括铁路、公路、水路、航空、管道等五种运输方式。( ) 11、全轮驱动的双轴汽车可用4*2来表示。( ) 12、“红旗法规”是1865年法国制定的。( ) 13、底特律是美国的汽车城。( ) 14、我国从1998年7月1日起,全国所有汽车一律停止使用含铅汽油,改用无铅汽油。( ) 15、与同等排量的汽油车相比,柴油轿车能够节油60%以上。( ) 16、除了内燃机汽车,二十一世纪占据重要地位的汽车将是太阳能汽车。( ) 17、世界方程式赛车最初级的形式是康巴斯赛车。( ) 18、“GT ”赛是汽车耐久赛的简称。( ) 学校: 班级: 姓名: 学号: 身份证号: ……………………………装………………………订………………………线…………………………………
单像空间后方交会和双像解析空间后方-前方交会的算法程序实现
单像空间后方交会和双像解析空间后方-前 方交会的算法程序实现 遥感科学与技术 摘要:如果已知每张像片的6个外方位元素,就能确定被摄物体与航摄像片的关系。因此,利用单像空间后方交会的方法,可以迅速的算出每张像片的6个外方位元素。而前方交会的计算,可以算出像片上点对应于地面点的三维坐标。基于这两点,利用计算机强大的运算能力,可以代替人脑快速的完成复杂的计算过程。 关键词:后方交会,前方交会,外方位元素,C++编程 0.引言: 单张像片空间后方交会是摄影测量基本问题之一,是由若干控制点及其相应像点坐标求解摄站参数(X S,Y S,ZS,ψ、ω、κ)。单像空间后方交会主要有三种方法:基于共线条件方程的平差解法、角锥法、基于直接线性变换的解法。而本文将介绍第一种方法,基于共线条件方程反求象片的外方位元素。 而空间前方交会先以单张像片为单位进行空间后方交会,分别求出两张像片的外方位元素,再根据待定点的一对像点坐标,用空间前方交会的方法求解待定点的地面坐标。可以说,这种求解地面点的坐标的方法是以单张像片空间后方交会为基础的,因此,单张像片空间后方交会成为解决这两个问题以及算法程序实现的关键。
1.单像空间后方交会的算法程序实现: (1)空间后方交会的基本原理:对于遥感影像,如何获取像片的外方位元素,一直是摄影测量工作者探讨的问题,其方法有:利用雷达(Radar)、全球定位系统(GPS)、惯性导航系统(I N S)以及星像摄影机来获取像片的外方位元素;也可以利用一定数量的地面控制点,根据共线方程,反求像片的外方位元素,这种方法称为单像空间后方交会(如图1所示)。 图中,地面坐标X i、Yi、Zi和对应的像点坐标x i、yi是已知的,外方位元素XS、Y S、ZS(摄站点坐标),ψ、ω、κ(像片姿态角)是待求的。 (2)空间后方交会数学模型:空间后方交会的数学模型是共线方程, 即中心投影的构像方程: 式中X、Y、Z是地面某点在地面摄影测量坐标系中的坐标,x,y是该地面点在像片上的构像点的像片坐标,对 于空间后方交会而言它们是已知的,还有主距f是已知的。而9个方向余弦a 1,a 2,a3;b1,b 2,b 3;c 1,c2,c 3是未知的,具体表达式可以取
汽车文化期末考试题及答案
第七届丝绸之路汽车越野拉力赛 江西省井冈山经贸学校2014—2015第二学期 15汽修(3)班《汽车文化》期末考试题 注意事项: 1、考生应严格遵守考场规则,得到监考人员指令后方可答题。 2、考生拿到试卷后应首先填写密封线内各项内容(准考证号、姓名、学校),不得填出密封线外,同时把座位号填写在试卷右上角座位号栏内。 3、用蓝、黑色圆珠笔或钢笔把答案直接写在试卷上。 4、注意字迹清楚,保持卷面整洁。 5、考试结束将试卷放在桌上,不得带走。待监考人员收毕清点后,方可离场。 一、填空题 :(每小题 1 分,共计 20 分) 1、 汽车诞生在 年。 2、 世界上第一条汽车流水装配线是在 国。 3、 被誉为赛车之父的是 。 4、 德国奥迪汽车公司原来是由 家公司合并而成。 5、 发明子午线轮胎的公司是 。 6、 中国唯一符合FIA 国际标准的F1赛道在 。 7、 世界上最著名的勒曼24小时汽车耐力赛举办地点是在 。 8、 世界上累计产量最高的汽车是 。 9、 SUV 是 汽车。 10、 现代汽车鼻祖是本茨及 。 11、 世界上最大的汽车城是美国的 。 12、 宝马的英文缩写名称是 。 13、 客车的车辆类别代号是 。 14、 我国汽车报废标准规定,家用轿车的使用年限为 年。 15、 VIN 车辆识别代码共有 位。 16、 汽油的辛烷值越高,其 越好。 17、 自动变速器上N 代表 。 18、 排气管“放炮”的主要原因有 。 19、 电控汽油机大多采用 点喷射。 20、 最新的汽车分类标准将汽车分成 商用车和 车两大类。 二、单选题 :(每题 2 分,共计 60 分) 1的驱动形式是 。 A 、FR B 、FF C 、RR 2、 兰博基尼在创建初期生产什么 。 A 、飞机 B 、农用机械 C 、自行车 3、 最注重汽车安全性的汽车厂商是 汽车公司 。 A 、沃尔沃 B 、奔驰 C 、通用 4、 ABS 是 的缩写。 A 、 全球卫星定位系统 B 、电子防抱死制动系统 C 、汽车驱动防滑驱动系统 5、 GPS 是 A 的缩写。 A 、 全球卫星定位系统 B 、全球监测系统 C 、全球导航系统 6、 保时捷的创立者,甲壳虫的设计者是 。 A 、 菲迪南德.波尔舍 B 、菲迪南德.雷诺 C 、菲迪南德.费雷 7、 舒马赫夺得过 F1冠军 。 A 、 6 B 、5 C 、7 8、 转子发动机的发明人的国籍是 。 A 、日本 B 、德国 C 、 美国 9、 F1大奖赛全年共有 站。 A 、17 B 、16 C 、15 10、 ESP 是 的缩写。 A 、主动式车身悬挂系统 B 、电子动态稳定系统 C 、电子感应刹车控制系统 11、“MPV ”是 的英文缩写。 A 、高级房车 B 、运动型多用途车 C 、多用途厢式车 12、奥兹莫比尔是 汽车公司的品牌。 A 、克莱斯勒 B 、通用 C 、奥迪 13、Seat 品牌属于 国家。 A 、美国 B 、意大利 C 、西班牙 14、第一个ABS 系统的制造商是 。 学校: 班级: 姓名: 学号: 身份证号: ……………………………装………………………订………………………
全站仪后方交会操作过程
全站仪放样,作为施工过程中一项重要环节,对技术员已上升为必须擅长的仪器操作内容。全站仪建站一般有两种方法,即极坐标法建站和后方交会法建站。现以尼康全站仪为例,讲述全站仪后方交会法建站、放样全过程。(其他品牌全站仪可参考进行) 一、建站 1.将仪器架于两已知点均可通视,且可完全看到放样目标点位置的高处。尽量保证视线夹角在60度左右,仪器架设高度适中,三脚架腿踩实,不可出现放样过程中架腿松动现象。(注意:整个放样过程中仪器附近不应有人来回走动,且放样人员应尽量站在一点不动,减少因人员走动导致仪器震动偏移。) 2.固定仪器,上下松动架腿大致调整圆水准器气泡基本居中,按下电源键开机,上下左右转动一下,按下“0”键,进入精平模式。 将水准管放于平行于两螺旋连线方向,关注屏幕上数值,“”过大,便同时向内或向外转动平行方向两螺旋至数值符合要求(一般数值处于5"以内即可);“”过大,便左转或右转垂直方向螺旋至数值符合要求。旋转60度,检查,若仍有些许偏差,再按上述调整。再旋转60度继续检查至完成。 3.按下“确定”键记录,按“建站”键进入建站模式,选择“后方交会法”按“确定”。①若全站仪内已有建站点坐标,可在“PT”栏输入点名(“MODE”键可切换数字与字母),按“确定”键自动跳出坐标,再输入棱镜高(本项目为1.35m和1.2m两种);②若全站仪内无建站点坐标,于“PT”处按“确定”键进入坐标输入界面,XYZ
输完后,按“确定”回到界面,再输入仪器高。 CD数值暂时不输,按“确定”跳过进而记录,进入瞄准后视点1界面,视线内横竖丝卡住棱镜头“横竖尖头”(一般要求:竖向从镜杆底部瞄起,再翻转上去;横向以卡住两边尖为准),瞄准后,点击“测量1”(一般仪器内部设置“测量1”为棱镜模式且双频,“测量2”为免棱镜模式且单频,具体设置可内部调节变动)测量,待响两声后,在不转动仪器前按“确定”键记录,重复“PT”输入点坐标和棱镜高进行后视点2的瞄准,按“测量1”测量(若发现测量时后视瞄准有移动,再瞄准再按“测量1”测量)。 4.确定无误后,按“确定”键记录,自动开始计算建站误差,一般要求建站误差在5mm以内。(考虑仪器自身状态和其他情况,计算出结果有几种不正常情况:①建站误差过大,处理办法为按一次“ESC 键”返回测量后视点2,再次瞄准,测量,再计算,若还是很大,重新建站;②出现“输入第三个点”,处理办法为检查输入点坐标是否输入有误,确定无误,再次测量,若不行,重新建站) 建站误差符合要求后,按“确定”键记录,重新输入点名,其他可按“确定”或“”键跳过,最后“确定”键完成建站。 二、放样 点击“放样”键,按“确定”或“”键跳过界面,至下一个坐标输入界面,输入坐标,瞄准,“测量1”测量,按指示告知架镜人员左右前后移动至定点位置,通知定点。 一次“ESC”键返回,再按“确定”或“”键跳过界面,进入下
汽车文化项目期末考试题2答案
东莞电大附属职业学校《汽车文化》 期末测试试卷 姓名______ 班级______学号_________成绩______ 一.单项选择题(在每小题的四个备选答案中,选出一个正 确答案,并将正确答案的选项填在题后的括号内。每小题1分, 共25分) 1.最早小批量生产汽车的国家是( C ) A. 德国 B.法国 C.美国 D.英国2.柴油机是( A )发明的。 A.迪塞尔 B.迪塞尔 C.汪克尔 D.雷诺尔3. 本田汽车公 司高级轿车的品牌是( C )。 A.雅阁 B.阿库拉 C.雷克萨斯 D.无限4.韩国最大的汽车 公司是( C )。 A.双龙 B.起亚 C.现代 D.大宇5.第一辆四轮汽车在哪 国诞生( B ) A法国 B德国 C美国 D英国 6.世界上最早组织汽车比赛的国家是( A ) A.法国 B.中国 C.美国 D.德国 7.1956年7月,我国国产第一辆( B )牌4t载货汽车在第一 汽车制造厂诞生。 A.东风 B.解放 C.红旗 D.跃进 1
8.汽油的辛烷值一般表示汽油的 (C) A.经济性 B.挥发性 C.抗爆性 D.燃烧性9.在下列指标中,(A )可以作为汽车燃料经济性能评价指标。 A.有效燃料消耗率 B.百公里耗油量 C.有效热效率 D.每小时耗油量 10.确定汽车外形需要考虑三个因素,即机械工程学、人体工程学和(D ) A、运动学 B、地面力学 C、仿生学 D、空气动力学 11.汽车运动按照比赛路线划分主要类别有:长距离比赛、环形场地赛和( D ) A、拉力赛 B、越野赛 C、公路赛 D、无道路比赛 12.红、黄、白、黑、蓝各色旗帜飘舞在精彩刺激的F1赛场上,车手和裁判之间的信息通过旗帜来表达和传递。( B ) 表示赛道外有事故或危险。 A、红旗 B、黄旗 C、黑旗 D、蓝旗 13.迈克尔.舒马赫总共荣登(A)次F1世界冠军的宝座。 A、7次 B、6次 C、5次 D、4次 14.机动车的( B )是指车辆在最短的时间内强制停车的效能。 A、稳定性能 B、制动性能 C、操纵性能 D.加速性 15.我国的第一个中外合资企业为( D )
后方交会程序实现(c语言版)
#include for(l=0;l 期末考试试卷 班级_____________ 姓名____________ 一、填空题(每题2分,共20分) 1.德国工程师_____发明了三轮汽车,___ 年 1月 29日被认为是世界汽车诞生日。 2.1908年,福特开发了举世闻名的____,并首创了汽车大规模____方式,极大地提高了生产效率。 3.宝马是驰名世界的汽车企业,被认为是高档汽车生产业的先导。宝马标志中间的蓝白相间图案,代表____ 、____ 和___ 。 4.美国通用汽车的创始人为____。 5.劳斯莱斯属于____ 汽车公司。 6.目前清洁能源汽车中有一种用LPG作为燃料,LPG是指____。 7.“VIN车辆识别代号编码”由一组字母和阿拉伯数字组成,共____位。 8.下列公司属于福特汽车公司的为____。 9.世界汽车制造业中最大的跨国公司是____ 。 10.“当他未来到人世时,这个世界还是马车时代。当他离开人世时,这个世界已成了汽车的世界”这句话使用来形容____的。 二、判断题(每题2分,共20分) 1.我国第一辆轿车是东风牌轿车。( ) 2.我国第一辆红旗轿车是1958年7月由第一汽车制造厂研制出来的。 () 3.底特律是美国的汽车城。() 4.被称为“日本的福特”是本田宗一郎。( ) 5.中国唯一符合FIA国际标准的F1赛道在上海。( ) 6。我国从1998年7月1日起,全国所有汽车一律停止使用含铅汽油,改用无铅汽油。() 7.与同等排量的汽油车相比,柴油轿车能够节油60%以上。() 8.除了内燃机汽车,21世纪占据重要地位的汽车将是太阳能汽车。() 9.世界方程式赛车最初级的形式是康巴斯赛车。() 10.“GT”赛是汽车耐久赛的简称。() 三、不定项选择题(每小题2分,共20分) 1.三个椭圆是()汽车公司的商标。 1、角度测量(angle observation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB ,则: 1)当精度要求不高时: 瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。 2)当精度要求高时:——可用测回法(method of observation set )。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。 2、距离测量(distance measurement ) PSM 、PPM 的设置——测距、测坐标、放样前。 1)棱镜常数(PSM )的设置。 一般:PRISM=0 (原配棱镜),-30mm (国产棱镜) 2)大气改正数(PPM )(乘常数)的设置。 输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”(MEAS )。 3、坐标测量(coordinate measurement ) (1)功能:可测量目标点的三维坐标(X ,Y ,H )。 (2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。。。 若输入:方位角,测站坐标(,);测得:水平角和平距。则有: 方位角: 坐标: 若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有: 高程: (3)方法: 输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。 4、点位放样(Layout) (1)功能:根据设计的待放样点P 的坐标,在实地标出P 点的平面位置及填挖高度。(2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值dD 和角度差dHR 或纵向差值Δ X 和横向差值Δ Y 。 3)根据显示的dD 、dHR 或ΔX 、ΔY ,逐渐找到放样点的位置。 5、程序测量(programs ) (1)数据采集(data collecting) (2)坐标放样(layout) (3)对边测量(MLM)、悬高测量(REM)、面积测量(AREA)、后方交会(RESECTION) 等。 程序运行环境为Visual Studio2010.运行前请先将坐标数据放在debug 下。 1.单像空间后方交会 C语言程序: #include 18.后方交会测量 后方交会通过对多个已知点的测量定出测站点的坐 标。 输入值或观测值 输出值 Ni.Ei.Zi:已知点的坐标值No.Eo.Zo:测站点的坐标值 Hi :水平角观测值 Vi :垂直角观测值 Di :距离观测值 已知点(P1) 已知点(P2) 测站点(P0) 已知点(P4) 已知点(P3) BTS-800 通过观测2-10 已知点便可计算出测站点的坐标。 当观测的已知点超过 2 个,计算N、E 坐标时将采用最小二乘法进行平差,并给出平差结果的不确定度。而Z 坐标则通过计算平均值求取。因此,观测的已知点越多,计算所得的坐标精度也就越高。 后方交会测量也可在菜单模式下选取“后方交会”来进行。 使用“后方交会”,已知点输入应按顺时针顺序输入,否则计算结果可能不准确。 49 18.1 测量两已知点求取测站坐标 操作过程操作键 1.在测量模式第三页下按【后交】进入 显示 后方交会测量功能,显示已知点坐标 输入屏幕。 在菜单模式下选取“3.后方交会”也 可以进入后方交会测量 2.输入已知点1 的坐标,每输入一行数据 按【】,输入完成后,照准已知点 1 棱镜,按【测量】进行测量。 3.测量完成后,显示测量结果,并要求输 入已知点棱镜高。【后交】 【测量】 【输入测量已知点1】 N﹤m﹥: E﹤m﹥: Z﹤m﹥: 【后方交会】 S: 557.259m ZA: 97°31′05″ HAR: 351°15′06″ 连续测量模式需按【停止】停止测量。 4.按【确定】,进入已知点2 坐标输入及测 量。 重复2-3 完成已知点2 的输入及测量。 【确定】 50期末考试试卷(含答案)《汽车文化》
全站仪后方交会法步骤和高程测量步骤
摄影测量程序汇总(后方交会+前方交会+单模型光束法平差)
后方交会测量步骤