实验数据与曲线拟合

实验数据与曲线拟合
1. 曲线拟合
1. 曲线拟合的定义
2. 简单线性数据拟合的例子
2. 最小二乘法曲线拟合
1. 最小二乘法原理
2. 高斯消元法求解方程组
3. 最小二乘法解决速度与加速度实验
3. 三次样条曲线拟合
1. 插值函数
2. 样条函数的定义
3. 边界条件
4. 推导三次样条函数
5. 追赶法求解方程组
6. 三次样条曲线拟合算法实现
7. 三次样条曲线拟合的效果
4. 12.1 曲线拟合
5. 12.1.1 曲线拟合的定义
6. 曲线拟合(Curve Fitting)的数学定义是指用连续曲线近似地刻画或比拟平面上一组离散点所表示的坐
标之间的函数关系,是一种用解析表达式逼近离散数据的方法。曲线拟合通俗的说法就是“拉曲线”,也就是将现有数据透过数学方法来代入一条数学方程式的表示方法。科学和工程遇到的很多问题,往往只能通过诸如采样、实验等方法获得若干离散的数据,根据这些数据,如果能够找到一个连续的函数(也就是曲线)或者更加密集的离散方程,使得实验数据与方程的曲线能够在最大程度上近似吻合,就可以根据曲线方程对数据进行数学计算,对实验结果进行理论分析,甚至对某些不具备测量条件的位置的结果进行估算。
7. 12.1.2 简单线性数据拟合的例子
8. 回想一下中学物理课的“速度与加速度”实验:假设某物体正在做加速运动,加速度未知,某实验人员
从时间t0 = 3秒时刻开始,以1秒时间间隔对这个物体连续进行了12次测速,得到一组速度和时间的离散数据,请根据实验结果推算该物体的加速度。
9. 表 12 – 1 物体速度和时间的测量关系表
10. 在选择了合适的坐标刻度之后,我们就可以在坐标纸上画出这些点。如图12–1所示,排除偏差明显
偏大的测量值后,可以看出测量结果呈现典型的线性特征。沿着该线性特征画一条直线,使尽量多的测量点能够位于直线上,或与直线的偏差尽量小,这条直线就是我们根据测量结果拟合的速度与时间的函数关
系。最后在坐标纸上测量出直线的斜率K,K就是被测物体的加速度,经过测量,我们实验测到的物体加速度值是1.48米/秒2。
11.
12. 图 12 – 1 实验法测量加速度的过程
13.
14. 12.2 最小二乘法曲线拟合
15. 使用数学分析进行曲线拟合有很多常用的方法,这一节我们先介绍一下最简单的最小二乘法,并给出
使用最小二乘法解决上一节给出的速度与加速度实验问题。
16.
17. 12.2.1 最小二乘法原理
18. 最小二乘法(又称最小平方法)通过最小化误差的平方和寻找数据的最佳函数匹配,利用最小二乘法
可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小,当然,做为一种插值方法使用时,最小二乘法也可以用于曲线拟合。使用最小二乘法进行曲线拟合是曲线拟合种早期的一种常用方法,不过,最小二乘法理论简单,计算量小,即便是在使用三次样条曲线或RBF(Radial Basis Function)进行曲线拟合大行其道的今天,最小二乘法在多项式曲线或直线的拟合问题上,仍然得到广泛地应用。使用最小二乘法,选取的匹配函数的模式非常重要,如果离散数据呈现的是指数变化规律,则应该选择指数形式的匹配函数模式,如果是多项式变化规律,则应该选择多项式匹配模式,如果选择的模式不对,拟合的效果就会很差,这也是使用最小二乘法进行曲线拟合时需要特别注意的一个地方。
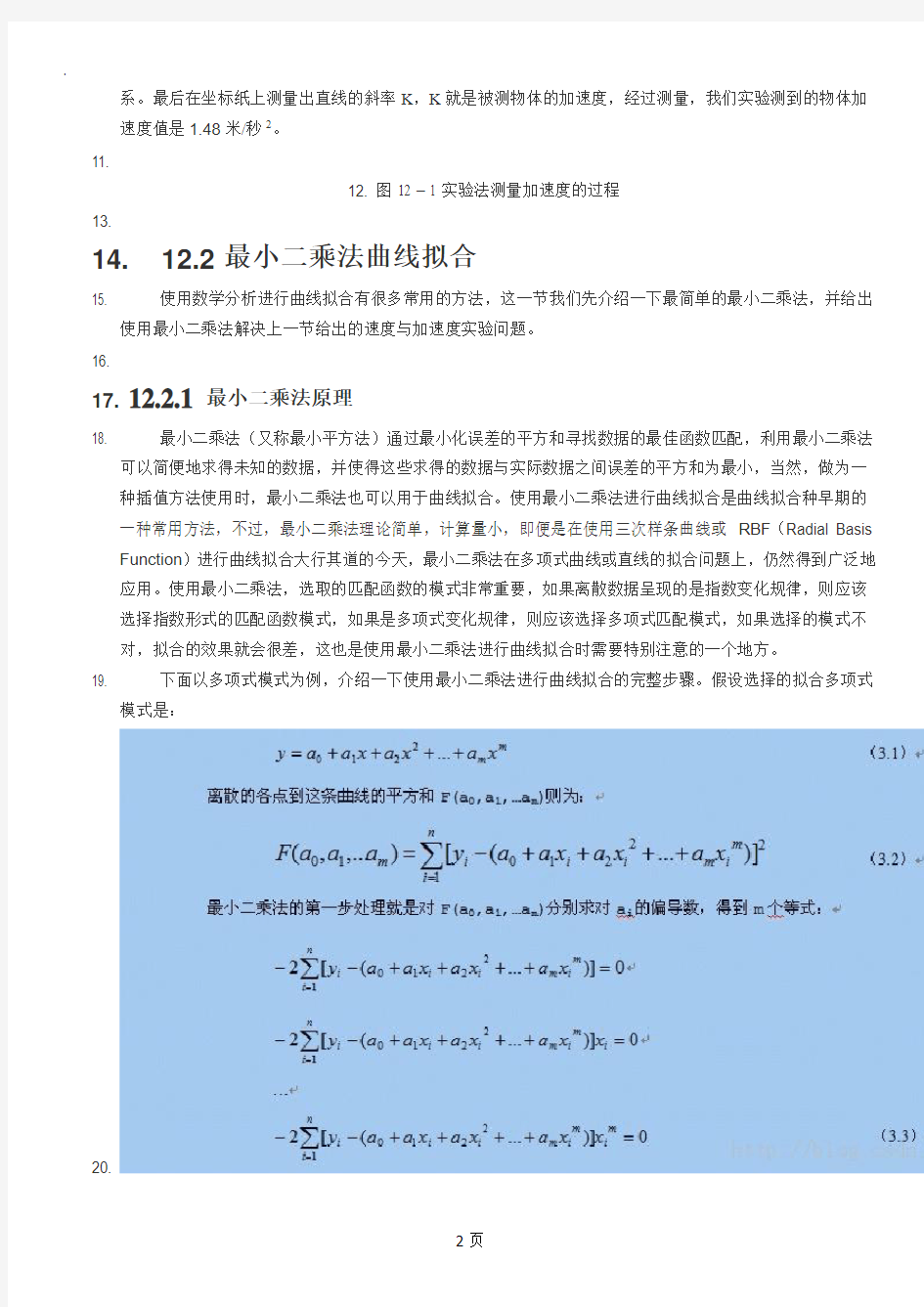
19. 下面以多项式模式为例,介绍一下使用最小二乘法进行曲线拟合的完整步骤。假设选择的拟合多项式
模式是:
20.
21. 这m个等式相当于m个方程,a0,a1,…a m是m个未知量,因此这m个方程组成的方程组是可解的,最小
二乘法的第二步处理就是将其整理为针对a0,a1,…a m的正规方程组。最终整理的方程组如下:
22.
23. 最小二乘法的第三步处理就是求解这个多元一次方程组,得到多项式的系数a0,a1,…a m,,就可以得到曲线
的拟合多项式函数。求解多元一次方程组的方法很多,高斯消元法是最常用的一种方法,下一节就简单介绍一下最小二乘算法实现所用的高斯消元法算法。
24. 12.2.2 高斯消元法求解方程组
25. 在数学上,高斯消元法是线性代数中的一个算法,可用来求解多元一次线性方程组,也可以用来求矩
阵的秩,以及求可逆方阵的逆矩阵。高斯消元法虽然以数学家高斯的名字命名,但是最早出现在文献资料中应该是中国的《九章算术》。
26. 高斯消元法的主要思想是通过对系数矩阵进行行变换,将方程组的系数矩阵由对称矩阵变为三角矩阵,
从而达到消元的目的,最后通过回代逐个获得方程组的解。在消元的过程中,如果某一行的对角线元素的值太小,在计算过程中就会出现很大的数除以很小的数的情况,有除法溢出的可能,因此在消元的过程中,通常都会增加一个主元选择的步骤,通过行交换操作,将当前列绝对值最大的行交换到当前行位置,避免了除法溢出问题,增加了算法的稳定性。
27. 高斯消元法算法实现简单,主要有两个步骤组成,第一个步骤就是通过选择主元,逐行消元,最终行
程方程组系数矩阵的三角矩阵形式,第二个步骤就是逐步回代的过程,最终矩阵的对角线上的元素就是方程组的解。下面就给出高斯消元法的一个算法实现:
76/*带列主元的高斯消去法解方程组,最后的解在matrixA的对角线上*/
77bool GuassEquation::Resolve(std::vector
78{
79 assert(xValue.size()== m_DIM);
80
81/*消元,得到上三角阵*/
82for(int i =0; i < m_DIM -1; i++)
83{
84/*按列选主元*/
85int pivotRow = SelectPivotalElement(i);
86if(pivotRow != i)/*如果有必要,交换行*/
87{
88 SwapRow(i, pivotRow);
89}
90if(IsPrecisionZero(m_matrixA[i * m_DIM + i]))/*主元是0? 不存在唯一解*/
91{
92return false;
93}
94/*对系数归一化处理,使行第一个系数是1.0*/
95 SimplePivotalRow(i, i);
96/*逐行进行消元*/
97for(int j = i +1; j < m_DIM; j++)
98{
99 RowElimination(i, j, i);
100}
101}
102/*回代求解*/
103 m_matrixA[(m_DIM -1)* m_DIM + m_DIM -1]= m_bVal[m_DIM -1]/m_matrixA[(m_D IM -1)* m_DIM + m_DIM -1];
104for(int i = m_DIM -2; i >=0; i--)
105{
106double totalCof =0.0;
107for(int j = i +1; j < m_DIM; j++)
108{
109 totalCof += m_matrixA[i * m_DIM + j]* m_matrixA[j * m_DIM + j];
110}
111 m_matrixA[i * m_DIM + i]=(m_bVal[i]- totalCof)/ m_matrixA[i * m_DIM+ i ];
112}
113
114/*将对角线元素的解逐个存入解向量*/
115for(int i =0; i < m_DIM; i++)
116{
117 xValue[i]= m_matrixA[i * m_DIM + i];
118}
119
120return true;
121}
28.
29. GuassEquation::Resolve()函数中m_matrixA是以一维数组形式存放的系数矩阵,m_DIM是矩阵的维
数,SelectPivotalElement()函数从系数矩阵的第i列中选择绝对值最大的那个值所在的行,并返回行号,SwapRow()函数负责交换系数矩阵两个行的所有值,SimplePivotalRow()函数是归一化处理函数,通过除法操作将指定的行的对角线元素变换为1.0,以便简化随后的消元操作。
30. 12.2.3 最小二乘法解决“速度与加速度”实验
31. 根据12.2.1节对最小二乘法原理的分析,用程序实现最小二乘法曲线拟合的算法主要由两个步骤组成,
第一个步骤就是根据给出的测量值生成关于拟合多项式系数的方程组,第二个步骤就是解这个方程组,求出拟合多项式的各个系数。根据对上文最终整理的正规方程组的分析,可以看出其系数有一定的关系,就是每一个方程式都比前一个方程式多乘了一个x i。因此,只需要完整计算出第一个方程式的系数,其他方程式的系数只是将前一个方程式的系数依次左移一位,然后单独计算出最后一个系数就可以了,此方法可以减少很多无谓的计算。求解多元一次方程组的方法就使用12.2.2节介绍的高斯消元法,其算法上一节已经给出。
32. 这里给出一个最小二乘算法的完整实现,以12.1.2节的数据为例,因为数据结果明显呈现线性方程的
特征,因此选择拟合多项式为v = v0 + at,v0和a就是要求解的拟合多项式系数。
99bool LeastSquare(const std::vector
100int M, std::vector
101{
102 assert(x_value.size()== y_value.size());
103 assert(a_value.size()== M);
104
105double*matrix =new double[M * M];
106double*b=new double[M];
107
108 std::vector
109 std::vector
110for(int i =0; i < M; i++)
111{
112 matrix[ARR_INDEX(0, i, M)]= std::accumulate(x_m.begin(), x_m.end(),0.0); 113for(int j =0; j
114{
115 y_i[j]= x_m[j]* y_value[j];
116}
117 b[i]= std::accumulate(y_i.begin(), y_i.end(),0.0);
118for(int k =0; k
119{
120 x_m[k]*= x_value[k];
121}
122}
123for(int row =1; row < M; row++)
124{
125for(int i =0; i < M -1; i++)
126{
127 matrix[ARR_INDEX(row, i, M)]= matrix[ARR_INDEX(row -1, i +1,M)]; 128}
129 matrix[ARR_INDEX(row, M -1, M)]= std::accumulate(x_m.begin(),x_m.end(), 0.0);
130for(int k =0; k
131{
132 x_m[k]*= x_value[k];
133}
134}
135
136 GuassEquation equation(M, matrix, b);
137delete[] matrix;
138delete[] b;
139
140return equation.Resolve(a_value);
141}
33. 将表12-1的数据带入算法,计算得到v0 = 4.05545455,a = 1.48818182,比作图法得到的结果更精
确。以上算法是根据最小二乘法的理论推导系数方程,并求解系数方程得到拟合多项式的系数的一种实现方法,除此之外,还可以利用预先计算好的最小二乘解析理论直接求得拟合多项式的系数,读者可自行学习相关的实现算法。
34.
35. 12.3 三次样条曲线拟合
36. 曲线拟合基本上就是一个插值计算的过程,除了最小二乘法,其他插值方法也可以被用于曲线拟合。
常用的曲线拟合方法还有基于RBF(Radial Basis Function)的曲线拟合和三次样条曲线拟合。最小二乘法方法简单,便于实现,但是如果拟合模式选择不当,会产生较大的偏差,特别是对于复杂曲线的拟合,如果选错了模式,拟合的效果就很差。基于RBF(Radial Basis Function)的曲线拟合方法需要高深的数学基础,涉及多维空间理论,将低维的模式输入数据转换到高维空间中,使得低维空间内的线性不可分问题在
高维空间内变得线性可分,这种数学分析方法非常强大,但是这种方法不宜得到拟合函数,因此在需要求解拟合函数的情况下使用起来不是很方便。
37. 样条插值是一种工业设计中常用的、得到平滑曲线的一种插值方法,三次样条又是其中用的较为广泛
的一种。使用三次样条曲线进行曲线拟合可以得到非常高精度的拟合结果,并且很容易得到拟合函数,本节的内容将重点介绍三次样条曲线拟合的原理和算法实现,并通过一个具体的例子将三次样条函数拟合的曲线与原始曲线对比显示,体会一下三次样条曲线拟合的惊人效果。
38.
39. 12.3.1 插值函数
40. 前文提到过,曲线拟合的实质就是各种插值计算,因此,插值函数的选择决定了曲线拟合的效果。那
么插值函数的数学定义是什么呢?若在[a, b]上给出n + 1个点a ≤ x0 < x1 < ? < x n≤ b,f(x) 是[a, b]上的实值函数, 要求一个具有n + 1个参量的函数s(x; a0,...,a n) 使它满足
41. s(x i; a0,..., a n) = f(x i) , i = 0, 1, ?, n (3.5)
42. 则称s(x)为f(x) 在[a, b]上的插值函数. 若s(x) 关于参量a0, a1,...,a n是线性关系, 即:
43. s(x) = a0s0(x) + a1s1(x) + ? + a n s n(x) (3.6)
44. s(x)就是多项式插值函数,如果s i(x)是三角函数,则s(x)就是三角插值函数。
45. 比较常用的多项式插值函数是牛顿插值多项式和拉格朗日插值多项式,但是在多项式的次数比较高的
情况下,插值点数n过多会导致多项式插值在收敛性和稳定性上失去保证,因此,当插值点数n较大的情况下,一般不使用多项式插值,而采用样条插值或次数较低的最小二乘法插值。
46. 12.3.2 样条函数的定义
47. 在所有能够保证收敛性和稳定性的插值函数中,最常用的,也是最重要的插值函数就是样条插值函数。
采用样条函数计算出的插值曲线和曲面在飞机、轮船和汽车等精密机械设计中都得到了广泛的应用。样条插值函数的数学定义是这样的:
48. 设区间[a, b]上选取n - 1个节点(包括区间端点a和b共n + 1个节点),将其划分为n个子区间a = x0 <
x1 < ? < x n= b, 如果存在函数s(x),使得s(x)满足以下两个条件:
49. (1) s(x) 在整个区间[a, b]上具有m - 1阶连续导数;
50. (2) s(x)在每个子区间[x i-1, x i], i= 1, 2, ?, n 上是m 次代数多项式(最高次数为m次);
51. 则称s(x)是区间[a, b]上的m 次样条函数。假如区间[a, b]上存在实值函数f(x),使得每个节点处的值f(x i)与
s(x i)相等,即
52. s(x i) = f(x i), i = 0, 1, …, n(3.7)
53. 则称s(x)是实值函数f(x)的m 次样条插值函数。
54. 当m = 1时,样条插值函数就是分段线性插值, 此时虽然s(x)是属于区间[a, b]上的函数, 但它不光滑
(连一阶连续导数性质都不具备),不能满足工程设计要求。工程设计通常使用较多的是m = 3时的三次样条插值函数,此时样条函数具有二阶连续导数性质。
55. 根据三次样条函数的定义,s(x)在每个子区间上的样条函数s i(x)都是一个三次多项式,也就是说,三
次样条函数s(x)由n个区间上的n个三次多项式组成,每个三次多项式可描述为以下形式:
56. s i(x) = a i x3 + b i x2 + c i x + d i i = 1, 2, …, n(3.8)
57. 因此,要确定完整的样条函数s(x)需要确定a i、b i、c i和d i公4n个系数。根据样条函数的定义,s(x)在区间
内的n - 1个节点处都是连续的,并且其一阶导数s i‘(x)和二阶导数s i“(x)都是连续的,根据连续函数的性质(x i的左右导数相等),我们可以得到3(n - 1)个条件:
58. s i(x i - 0) = s i+1(x i + 0) i = 1, 2, …, n-1
59. s i‘(x i - 0) = s i+1‘(x i + 0) i = 1, 2, …, n-1
60. s i“(x i - 0) = s i+1“(x i + 0) i = 1, 2, …, n-1 (3.9)
61. 再加上插值函数在包括区间端点a(就是x0),b(就是x n)在内的n + 1个节点处满足s(x i) = f(x i),又可
以得到n + 1个条件,这样就具备了4n – 2个条件。
62. 12.3.3 边界条件
63. 为了解决4n个系数组成的方程组,最终确定的s(x),需要再补充两个边界条件使之满足4n个条件。
常用的边界条件有以下几种:
64. 第一类边界条件,即满足s‘(x0) = f’(x0),s‘(x n) = f’(x n)两个条件,其中f(x)是实值函数。
65. 第二类边界条件,即满足s”(x0) = f”(x0),s”(x n) = f”(x n)两个条件,其中f(x)是实值函数。特别情况下,
当f”(x0) = f”(x n) = 0的时候,也就是s”(x0) = s”(x n) = 0的情况下,第二类边界条件又被称为自然边界条件。
66. 当样条函数的实值函数f(x)是以[a, b]为周期的周期函数时,三次样条函数s(x)在两个端点处满足s‘(x0 -
0) = s‘(x n + 0)和s”(x0 - 0) = s”(x n + 0),这种情况又被成为第三类边界条件。
67. 工程技术中常用的是第一类边界条件和第二类边界条件,以及第二类边界条件的特殊情况自然边界条
件。理想情况下,也就是实值函数已知的情况下,可以通过实值函数直接计算出边界条件的值,否则的话,就只能通过测量和计算得到边界条件的值,有时候甚至只能给出经验估计值,工程技术中通常根据实际情况灵活使用各类边界条件。
68. 12.3.4 推导三次样条函数
69. 求三次样条插值函数s(x)的方法很多,其基本原理都是首先求出由待定系数组成的s(x),以及其一阶
导数s’(x)和二阶导数s”(x),然后将其带入到12.3.2和12.3.3节列举的4n个条件中,得到关于待定系数的方程组,最后求解方程组得到待定系数,并最终确定插值函数s(x)。
70. 求三次样条插值函数s(x)常用的方法是“三转角法”和“三弯矩法”。根据三次样条函数的性质,s(x)的一
阶导数s’(x)是二次多项式,二阶导数s”(x)是一次多项式(线性函数),“三转角法”和“三弯矩法”的主要区别是利用这两个特性推导插值函数s(x)、s’(x)和s”(x)的方式不同。“三转角法”利用s(x)的一阶导数s’(x)是二次多项式这个特性,对于子区间[x i, x i+1],利用抛物线插值公式获得一个通过x i和x i+1两个点的二次多项式做为s’(x),然后对s’(x)进行积分和微分(求导)运算,分别得到s(x),和s”(x),最后将它们带入4n个条件中求解系数方程组。“三弯矩法”则是利用s(x)的二阶导数s”(x)是一次多项式(线性函数)这个特性,对于子区间[x i, x i+1],首先假设一个通过x i和x i+1两个点的线性函数做为s”(x),然后对s”(x)进行连续两次积分运算得到s(x),再对s(x)进行求导得运算到s’(x),最后将它们带入4n个条件中求解系数方程组。这两种方法的本质是一样的,只是对s(x)的推导过程不同,接下来就介绍使用“三弯矩法”求解三次样条函数的方法。71. 三次样条函数的求解过程就是系数方程组的推导过程,使用“三弯矩法”推导系数方程组,首先要确定
插值函数的二阶导数s”(x)。根据三次样条函数的性质,在每个子区间[x i, x i+1]上,其二阶导数s”(x)是个线性
方程,现在假设在x i和x i+1两个端点的二阶导数值分别是M i和M i+1,也就是s”(x i) = M i,s”(x i+1) = M i+1,则经过x i和x i+1的两点式直线方程是:
72.
73.
74.
75. 从M0到M n,有n+1个M i的值需要求解,但是(3.20)只有n-1个等式,此时就需要用到两个边界条件了。
76. 如果是使用第二类边界条件,则直接可以得到以下两个条件等式:
77. s”(x0) = M0= f”(x0) = y0’(3.21)
78. s”(x n) = M n= f”(x n) = y n’(3.22)
79. 令d0 = 2y0’,d n = 2y n’,可以得到由第二类边界条件确定的两个方程:
80. 2M0 = d0 (3.23)
81. 2M n = d n (3.24)
82. 如果是使用第一类边界条件,即s‘(x0) = f’(x0),s‘(x n) = f’(x n)两个条件,则需要将这两个条件代入(3.16),
通过计算得到两个条件等式。将s‘(x0) = y0’代入(3.16),得到:
83.
84. 将第二类边界条件得到的(3.23)和(3.24)或第一类边界条件得到的(3.27)和(3.28)与(3.20)中的n –
1个等式组合在一起就得到一个关于M i的方程组,求解此方程组可以得到M i的值,代入到(3.15)即可得到三次样条函数方程。以第一类边界条件得到的(3.27)和(3.28)为例,与(3.20)连立得到以下方程组:
85.
86. 这就是三弯矩方程组,其中M i,i=0,1,…n就是三次样条函数s(x)的矩。根据(3.27)和(3.28),u n = 1,
v0 = 1,其余各系数可以通过(3.19)中的系数计算出来。这个方程组的系数矩阵是一个对角线矩阵,并且是一个严格对角占优的对角阵(u i和v i的值均小于主对角线的值,也就是u i和v i的值皆小于2),可以使用追赶法求解。下一节将介绍如何使用追赶法求解方程组,并给出求解的算法实现。
87. 12.3.5 追赶法求解方程组
88. 任意矩阵A,都可以通过克洛脱(Crout)分解得到两个三角矩阵:
89.
90. 其中y1=d1/l1,其余各项的递推计算关系是:
91. y i = (d i– m i y i-1)/l i,i = 2,3,… ,n
92. 对于第二个方程,求解最终结果x i:
93.
94. 其中x n = y n,其余各项的递推求解关系是:
95. x i = y i– u i x i+1,i = n – 1, n – 2, …, 1
96. 递推计算y i和x i的过程分别被形象地形容为追的过程和赶的过程,这也是追赶法得名的原因,实际上这种
方法在国际上叫做托马斯(Thomas)法。在这里需要强调一下,对三角矩阵的克洛脱分解需要满足几个条件,否则无法进行,这几个条件分别是:
97.
98. 下面就给出一个追赶法求解方程组的通用算法实现,在使用之前需要判断系数矩阵是否是对三角矩阵,
并且满足上述三个条件,相关的判断请读者自行添加:
76/*追赶法求对三角矩阵方程组的解*/
77bool ThomasEquation::Resolve(std::vector
78{
79 assert(xValue.size()== m_DIM);
80
81 std::vector
82 std::vector
83 std::vector
84 std::vector
85
86/*消元,追的过程*/
87 L[0]= m_matrixA[ARR_INDEX(0,0, m_DIM)];
88 U[0]= m_matrixA[ARR_INDEX(0,1, m_DIM)]/ L[0];
89 Y[0]= m_bVal[0]/ L[0];
90for(int i =1; i < m_DIM; i++)
91{
92if(IsPrecisionZero(m_matrixA[ARR_INDEX(i, i, m_DIM)]))
93{
94return false;
95}
96 M[i]= m_matrixA[ARR_INDEX(i, i -1, m_DIM)];
97 L[i]= m_matrixA[ARR_INDEX(i, i, m_DIM)]- M[i]* U[i -1];
98 Y[i]=(m_bVal[i]- M[i]* Y[i -1])/ L[i];
99if((i +1)< m_DIM)
100{
101 U[i]= m_matrixA[ARR_INDEX(i, i +1, m_DIM)]/ L[i];
102}
103}
104/*回代求解,赶的过程*/
105 xValue[m_DIM -1]= Y[m_DIM -1];
106for(int i = m_DIM -2; i >=0; i--)
107{
108 xValue[i]= Y[i]- U[i]* xValue[i +1];
109}
110
111return true;
112}
99.
100. 12.3.6 三次样条曲线拟合算法实现
101. 根据12.3.4节对三次样条函数的推导分析,三次样条曲线拟合算法的核心可分为三部分,第一部分是根据推导结果计算关于三次样条函数的“矩”的方程组的系数矩阵,第二部分就是用追赶法求解方程组,得到各个区间的三次样条函数,第三部分就是根据每个拟合点的输入的值x i,确定使用哪个区间的三次样条函数,并使用该区间的三次样条函数计算出三次样条插值y i,最后得到的一系列(x i, y i)组成的曲线就是三次样条拟合曲线。拟合算法也是按照上面的分析,分三个步骤计算插值:
102. 第一步是计算系数矩阵,其中u0、v0、d0和d n的值需要单独计算,其余的值可以通过(3.19)递推计算出来。
103. 第二步是将系数矩阵代入12.3.5节给出的追赶法通用算法,求出M i的值。求解之前,先证明一下第一步得到系数矩阵是否满足追赶法的条件。首先,主对角线元素的值都是2,满足12.3.5节的条件(1)。
其次,由u i和v i的计算条件可知,|u i| < 1,|v i| < 1,这也满足12.3.5节的条件(2)。最后,因为a i = 2,且u i和v i的和是1,所以12.3.5节的条件(3)也得到了满足。由上判断可知,求解三次样条函数的“矩”的系数矩阵满足使用追赶法求解的条件,可以使用追赶法求解。
104. 第三步是计算插值,需要将第二步计算得到的M i代入(3.15),并选择合适的子区间样条函数计算出插值点的值。
105. 下面就给出采用三弯矩法实现的三次样条曲线拟合算法,CalcSpline()函数的参数Xi和Yi是n个插值点(包括起点和终点)的值,boundType是边界条件类型,b1和b2分别是对应的两个边界条件,这个算法支持第一类和第二类边界条件(包括自然边界条件)。内部的矩阵matrixA就是按照(3.29)构造的M i方程组的系数矩阵,可用于直接用追赶法求解方程组。CalcSpline()函数的大部分代码都是在构造M i方程组的系数矩阵,首先根据边界条件确定u n、v0、d0和d n,其他系数则根据(3.19)的递推关系,在for(int
i = 1; i < (m_valN - 1); i++)循环中依次计算出来,最后是利用12.3.5节给出的追赶法算法求出M i。GetValue()
函数负责计算给定区间内任意位置的插值,首先根据x的值确定使用哪个子区间的样条函数,然后根据(3.12)和(3.14)给出的关系计算插值。
16void SplineFitting::CalcSpline(double*Xi,double*Yi,int n,int boundType,double
b1,double b2)
17{
18 assert((boundType ==1)||(boundType ==2));
19
20double*matrixA =new double[n * n];
21if(matrixA == NULL)
22{
23return;
24}
25double*d =new double[n];
26if(d == NULL)
27{
28delete[] matrixA;
29return;
30}
31
32 m_valN = n;
33 m_valXi.assign(Xi, Xi + m_valN);
34 m_valYi.assign(Yi, Yi + m_valN);
35 m_valMi.resize(m_valN);
36 memset(matrixA,0,sizeof(double)* n * n);
37
38 matrixA[ARR_INDEX(0,0, m_valN)]=2.0;
39 matrixA[ARR_INDEX(m_valN -1, m_valN -1, m_valN)]=2.0;
40if(boundType ==1)/*第一类边界条件*/
41{
42 matrixA[ARR_INDEX(0,1, m_valN)]=1.0;//v0
43 matrixA[ARR_INDEX(m_valN -1, m_valN -2, m_valN)]=1.0;//un
44double h0 = Xi[1]- Xi[0];
45 d[0]=6*((Yi[1]- Yi[0])/ h0 - b1)/ h0;//d0
46double hn_1 = Xi[m_valN -1]- Xi[m_valN -2];
47 d[m_valN -1]=6*(b2 -(Yi[m_valN -1]- Yi[m_valN -2])/ hn_1)/hn_1; //dn
48}
49else/*第二类边界条件*/
50{
51 matrixA[ARR_INDEX(0,1, m_valN)]=0.0;//v0
52 matrixA[ARR_INDEX(m_valN -1, m_valN -2, m_valN)]=0.0;//un
53 d[0]=2* b1;//d0
54 d[m_valN -1]=2* b2;//dn
55}
56/*计算ui,vi,di,i = 2,3,...,n-1*/
57for(int i =1; i <(m_valN -1); i++)
58{
59double hi_1 = Xi[i]- Xi[i -1];
60double hi = Xi[i +1]- Xi[i];
61 matrixA[ARR_INDEX(i, i -1, m_valN)]= hi_1 /(hi_1 + hi);//ui
62 matrixA[ARR_INDEX(i, i, m_valN)]=2.0;
63 matrixA[ARR_INDEX(i, i +1, m_valN)]=1- matrixA[ARR_INDEX(i, i -1,m_va lN)];//vi = 1 - ui
64 d[i]=6*((Yi[i +1]- Yi[i])/ hi -(Yi[i]- Yi[i -1])/ hi_1)/(hi_1 + hi);//di
65}
66
67 ThomasEquation equation(m_valN, matrixA, d);
68 equation.Resolve(m_valMi);
69 m_bCalcCompleted =true;
70
71delete[] matrixA;
72delete[] d;
73}
74
75double SplineFitting::GetValue(double x)
76{
77if(!m_bCalcCompleted)
78{
79return0.0;
80}
81if((x < m_valXi[0])||(x > m_valXi[m_valN -1]))
82{
83return0.0;
84}
85int i =0;
86for(i =0; i <(m_valN -1); i++)
87{
88if((x >= m_valXi[i])&&(x < m_valXi[i +1]))
89break;
90}
91double hi = m_valXi[i +1]- m_valXi[i];
92double xi_1 = m_valXi[i +1]- x;
93double xi = x - m_valXi[i];
94
95double y = xi_1 * xi_1 * xi_1 * m_valMi[i]/(6* hi);
96 y +=(xi * xi * xi * m_valMi[i +1]/(6* hi));
97
98double Ai =(m_valYi[i +1]- m_valYi[i])/ hi -(m_valMi[i +1]-m_valMi[i]) * hi /6.0;
99 y += Ai * x;
100double Bi = m_valYi[i +1]- m_valMi[i +1]* hi * hi /6.0- Ai *m_valXi[i + 1];
101 y += Bi;
102return y;
103}
106. 12.3.7 三次样条曲线拟合的效果
107. 本节将用定义一个原始函数,从原始函数的某个区间上抽取9个插值点,根据这9个插值点和原函数的边界条件,利用三次样条曲线插值进行曲线拟合,并将原始曲线和拟合曲线做对比,展示一下三次样条曲线拟合的效果。
108. 首先定义原始函数:
109. f(x) = 3/(1 + x2)
110. 选择区间[0.0, 8.0]上的9个点做为插值点,计算各点的值为:
111. 表 12 – 2 原函数f(x)在各插值点的值
112. 求f(x)的导函数f’(x):
113. f’(x) = -6x/(1 + x2)2
114. 根据f’(x)计算出在区间端点处的两个第一类边界条件f’(0.0) = 0.0, f’(8.0) = -0.01136。利用表12-2中的数据和这两个边界条件,计算出三次样条插值函数,并从0.0开始,以0.01为步长,连续求800个点的插值,将这些点连成曲线得到拟合曲线。为了作对比,同样从0.0开始,以0.01为步长,用f(x)函数连续计
算800个点的原值,将这些点连成曲线得到原始曲线。分别用不同的颜色画出这两条曲线,如图12-2所示:
115.
116. 图12-2 拟合曲线和原始曲线对比
117. 从图12-2可以看到,三次样条曲线拟合的效果非常好。同样在[0.0, 8.0]区间上,如果增加插值点的个数,将获得更好的拟合效果。比如以0.5为单位,将插值点增加到17个,则拟合的曲线与原始曲线几乎完全重合。
铁磁材料的滞回线和基本磁化曲线实验报告
南昌大学物理实验报告课程名称:普通物理实验(2) 实验名称:铁磁材料的磁滞回线和基本磁化曲线 学院:专业班级: 学生姓名:学号: 实验地点:座位号: 实验时间: 一、实验目的: 1、掌握用磁滞回线测试仪测绘磁滞回线的方法。 2、了解铁磁材料的磁化规律,用示波器法观察磁滞回线比较两种典型铁磁物质的动态磁化特性。 3、测定样品的磁化特性曲线(B-H曲线),并作μ-H曲线。 4、测绘样品在给定条件下的磁滞回线,估算其磁滞损耗以及相关H C、B R、B M、H、B的等参量。 二、实验仪器: TH—MHC型智能磁滞回线测试仪、示波器。 三、实验原理: 1.铁磁材料的磁滞特性
铁磁物质是一种性能特异,用途广泛的材料。铁、钴、镍及其众多合金以及含铁的氧化物(铁氧体)均属铁磁物质。其特性是在外磁场作用下能被强烈磁化,即磁导率μ很高。另一特征是磁滞,铁磁材料的磁滞现象是反复磁化过程中磁场强度H与磁感应强度B之间关系的特性。即磁场作用停止后,铁磁物质仍保留磁化状态,图1为铁磁物质的磁感应强度B与磁场强度H之间的关系曲线。 图中的原点O表示磁化之前铁磁物质处于磁中性状态,即B=H=O,当磁场强度H 从零开始增加时,磁感应强度B随之从零缓慢上升,如曲线Oa,继之B随H迅速增长,如曲线ab所示,其后B的增长又趋缓慢,并当H增至H S时,B达到饱和值B S这个过程的OabS曲线称为起始磁化曲线。如果在达到饱和状态之后使磁场强度H减小,这时磁感应强度B的值也要减小。图1表明,当磁场从H S逐渐减小至零,磁感应强度B并不沿起始磁化曲线恢复到“O”点,而是沿另一条新的曲线SR下降,对应的B值比原先的值大,说明铁磁材料的磁化过程是不可逆的过程。比较线段OS和SR可知,H减小B相应也减小,但B的变化滞后于H的变化,这种现象称为磁滞。磁滞的明显特征是当H=O时,磁感应强度B值并不等于0,而是保留一定大小的剩磁Br。 当磁场反向从0逐渐变至-H D,磁感应强度B消失,说明要消除剩磁,可以施加反向磁场。H D称为矫顽力,它的大小反映铁磁材料保持剩磁状态的能力,曲线RD称为退磁曲线。 图1还表明,当磁场按H S→O→H C→?H S→O→H D′→H S次序变化,相应的磁感应强度B则沿闭合曲线SRDS′R′D′S变化,可以看出磁感应强度B值的变化总是滞后于磁场强度H的变化,这条闭合曲线称为磁滞回线。当铁磁材料处于交变磁场中时(如变压器中的铁心),将沿磁滞回线反复被磁化→去磁→反向磁化→反向去磁。磁滞是铁磁材料的重要特性之一,研究铁磁材料的磁性就必须知道它的磁滞回线。各种不同铁磁材料有不同的磁滞回线,主要是磁滞回线的宽、窄不同和矫顽力大小不同。 当铁磁材料在交变磁场作用下反复磁化时将会发热,要消耗额外的能量,因为反复磁化时磁体内分子的状态不断改变,所以分子振动加剧,温度升高。使分子振动加剧的能量是产生磁场的交流电源供给的,并以热的形式从铁磁材料中释放,这种在反复磁化过程中能量的损耗称为磁滞损耗,理论和实践证明,磁滞损耗与磁滞回线所围面积成正比。 当初始状态为H=B=O的铁磁材料,在交变磁场强度由弱到强依次进行磁化,可以得到面积由小到大向外扩张的一簇磁滞回线,如图2所示,这些磁滞回线顶点的连线称为铁磁材料的基本磁化曲线。 图1 铁磁质起始磁化图2 同一铁磁材料的 曲线和磁滞回线一簇磁滞回线
磁滞回线和基本磁化曲线
磁滞回线和基本磁化曲线【实验原理】铁材料的磁滞现象: 铁磁材料的磁滞现象是反复磁化过程中磁场强度H与磁感应强度B之间的关系的特征。将一块未被磁化的铁磁材料放在磁场中进行磁化.当磁场强度H由零增加时,磁感应强度B由零开始增加。H继续增加,B增加缓慢,这个过程的B -H 曲线称为起始磁化曲线,如图l 中的oa 段所示。当磁场强度H减小,B也跟着减小,但不按起始磁化曲线原路返回,而是沿另一条曲线(图1中)ab 段下降,当H 返回到零时,B不为零,而保留一定的值Br,即铁磁材料仍处于磁化状态,通常Br称为磁材料的剩磁。将磁化场反向,使磁场强度负向增加,当H达到某一值材料中的磁感应强度才为零,这个磁场强度Hc 继续增加反向磁场强度,磁感应强度B反向增加。如图1中cd 段所示。Hc时,铁磁称为磁材料的矫顽力。增加到Hm时,其过程与磁场强度从Hm减小到-Hm 过程类似。这样形成一个闭合的磁滞回线。逐渐增加H从值,可以得到一系列的逐渐增大的磁滞回线,如图 2 所示。把原点与每个磁滞回线的顶端基本磁化曲线。如图1中oa 段所示。当Hm增加到一定程度时,磁滞回线两端较平,即H增加,B增加很小,在此时附近铁磁材料处于饱和状态。。基本磁化曲线上的点与原点连线
的斜率称为磁导率。 在给定磁场强度条件下表征单位H 所激励出的磁感应强度B ,直接表示材料磁化性能强弱。从磁化曲线上可以看出磁导率并不是常数。当铁磁材料处于磁饱和状态时,磁导率减小较快。曲线起始点对应的磁导率称为初始磁导率。磁导率的最大值称为最大磁导率。这两者反映 2 、示波器显示样品磁滞回线的实验原理及电路2 、示波器显示样品磁滞回线的实验原理及电路 曲线的特点。如图3所示。只要设法使示波器X 轴输入正比于被测样品中的H,使Y 轴输入正比于样品的B , 保持H和B为样品中的原有关系就可在示波器荧光屏上如实地显示出样品的磁滞回线。怎样才能使示波器的X轴输入正比于H , Y轴输入正比于B 呢?图4为测试磁滞回线的原理图。L为被测样品的平均长度 (虚细框), R1,R分别为原,副边匝数, 故只要将U1和UC分别接到示波器的X 轴与Y轴输入,则在荧光屏上扫描出来的图形就能如实地反映被测样品的磁滞回线。依次改变U1 各条磁滞回线顶点的连线便是基本磁化曲线。本实验的任 务之一是定出各顶点所代表的U1和UC的值(即H和B的值),画出基本磁化曲线
用示波器观察铁磁材料的动态磁滞回线_实验报告
图1 起始磁化曲线和磁滞回线 用示波器观察铁磁材料动态磁滞回线 【摘要】铁磁材料按特性分硬磁和软磁两大类,铁磁材料的磁化曲线和磁滞回线,反映该材料的重要特性。软磁材料的矫顽力H c 小于100A/m ,常用做电机、电力变压器的铁芯和电子仪器中各种频率小型变压器的铁芯。磁滞回线是反映铁磁材料磁性的重要特征曲线。矫顽力和饱和磁感应强度B s 、剩磁B r P 等参数均可以从磁滞回线上获得.这些参数是铁磁材料研制、生产、应用是的重要依据。 【关键词】磁滞回线 示波器 电容 电阻 Bm Hm Br H 【引言】铁磁物质的磁滞回线能够反映该物质的很多重要性质。本实验主要运用示波器的X 输入端和Y 输入端在屏幕上显示的图形以及相关 数据,来分析形象磁滞回线的一些因素,并根据 数据的处理得出动态磁滞回线的大致图线。 【实验目的】 1. 认识铁磁物质的磁化规律,比较两种典 型的铁磁物质的动态磁化特性。 2. 测定样品的H D 、B r 、B S 和(H m ·B m )等参 数。 3. 测绘样品的磁滞回线,估算其磁滞损耗。 【实验仪器】 电阻箱(两个),电容(3-5微法),数字万用表,示波器,交流电源,互感器。 【实验原理】 铁磁物质是一种性能特异,用途广泛的材 料。铁、钴、镍及其众多合金以及含铁的氧化物 (铁氧体)均属铁磁物质。其特征是在外磁场作用下能被强烈磁化,故磁导率μ很高。另一特征是磁滞,即磁化场作用停止后,铁磁质仍保留磁化状态,图1为铁磁物质的磁感应强度B 与磁化场强度H 之间的关系曲线。 图中的原点O 表示磁化之前铁磁物质处于磁中性状态,即B =H =O ,当磁场H 从零开始增加时,磁感应强度B 随之缓慢上升,如线段oa 所示,继之B 随H 迅速增长,如ab 所示,其后B 的增长又趋缓慢,并当H 增至H S 时,B 到达饱和值B S ,oabs 称为起始磁化曲线。图1表明,当磁场从H S 逐渐减小至零,磁感应强度B 并不沿起始磁化曲线恢复到“O ”点,而是沿另一条新的曲线SR 下降,比较线段OS 和SR 可知,H 减小B 相应也减小,但B 的变化滞后于H 的变化,这现象称为磁滞,磁滞的明显特征是当H =O 时,B 不为零,而保留剩磁Br 。 当磁场反向从O 逐渐变至-H D 时,磁感应强度B 消失,说明要消除剩磁,必须施加反向磁场,H D 称为矫顽力,它的大小反映铁磁材料保持剩磁状态的能力,线段RD 称为退磁曲线。 图1还表明,当磁场按H S →O →H D →-H S →O →H D ′→H S 次序变化,相应的磁感应强度B 则沿闭合曲线S S RD 'S D R ''变化,这闭合曲线称为磁滞回线。所以,当铁磁材料处于交变磁场中时(如变压器中的铁心),将沿磁滞回线反复被磁化→去磁→反向磁化→反向去磁。在此过程中要消耗额外的能量,并以热的形式从铁磁材料中释放,这种损耗称为磁滞损耗,可以证明,磁滞损耗与磁滞回线所围面积成正比。
曲线拟合与插值理论与实例
第11章曲线拟合与插值 在大量的应用领域中,人们经常面临用一个解析函数描述数据(通常是测量值)的任务。对这个问题有两种方法。在插值法里,数据假定是正确的,要求以某种方法描述数据点之间所发生的情况。这种方法在下一节讨论。这里讨论的方法是曲线拟合或回归。人们设法找出某条光滑曲线,它最佳地拟合数据,但不必要经过任何数据点。图11.1说明了这两种方法。标有'o'的是数据点;连接数据点的实线描绘了线性内插,虚线是数据的最佳拟合。 11.1 曲线拟合 曲线拟合涉及回答两个基本问题:最佳拟合意味着什么?应该用什么样的曲线?可用许多不同的方法定义最佳拟合,并存在无穷数目的曲线。所以,从这里开始,我们走向何方?正如它证实的那样,当最佳拟合被解释为在数据点的最小误差平方和,且所用的曲线限定为多项式时,那么曲线拟合是相当简捷的。数学上,称为多项式的最小二乘曲线拟合。如果这种描述使你混淆,再研究图11.1。虚线和标志的数据点之间的垂直距离是在该点的误差。对各数据点距离求平方,并把平方距离全加起来,就是误差平方和。这条虚线是使误差平方和尽可能小的曲线,即是最佳拟合。最小二乘这个术语仅仅是使误差平方和最小的省略说法。
图11.1 2阶曲线拟合 在MATLAB中,函数polyfit求解最小二乘曲线拟合问题。为了阐述这个函数的用法,让我们以上面图11.1中的数据开始。 ? x=[0 .1 .2 .3 .4 .5 .6 .7 .8 .9 1]; ? y=[-.447 1.978 3.28 6.16 7.08 7.34 7.66 9.56 9.48 9.30 11.2]; 为了用polyfit,我们必须给函数赋予上面的数据和我们希望最佳拟合数据的多项式的阶次或度。如果我们选择n=1作为阶次,得到最简单的线性近似。通常称为线性回归。相反,如果我们选择n=2作为阶次,得到一个2阶多项式。现在,我们选择一个2阶多项式。 ? n=2; % polynomial order ? p=polyfit(x, y, n) p = -9.8108 20.1293 -0.0317 polyfit的输出是一个多项式系数的行向量。其解是y = -9.8108x2+20.1293x-0.0317。为了将曲线拟合解与数据点比较,让我们把二者都绘成图。
磁滞回线的测量实验报告
磁滞回线的测量实验报 告 公司内部档案编码:[OPPTR-OPPT28-OPPTL98-
石家庄铁道大学物理实验中心 第1页 共10页 实验名称: 用示波器观测铁磁材料的动态磁滞回线 姓 名 学 号 班 级 桌 号 教 室 基础教学楼1101 实验日期 2016年 月 日 节 一、实验目的: 1、掌握磁滞、磁滞回线、磁化曲线、基本磁化曲线、矫顽力、剩磁、和磁导率的的概念。 2、学会用示波法测绘基本磁化曲线和动态磁滞回线。 3、根据磁滞回线测定铁磁材料在某一频率下的饱和磁感应强度Bs 、剩磁Br 和矫顽力Hc 的数值。 4、研究磁滞回线形状与频率的关系;并比较不同材料磁滞回线形状。 二、实验仪器 1. 双踪示波器 2. DH4516C 型磁滞回线测量仪 评 分 此实验项目教材没有相应内容,请做实验前仔细阅读本实验报告!并携带计算器,否则实验无法按时完成!
图1 磁性材料的磁化曲线图2 磁滞回线和磁化曲 线 2、磁滞现象、剩磁、矫顽力、磁滞回线 当铁磁质磁化达到饱和后,如果使H逐步退到零,B也逐渐减小,但B 的减小“跟不上”H的减小(B滞后于H)。即:其轨迹并不沿原曲线SO, 而是沿另一曲线Sb下降。当H下降为零时,B不为零,而是等于B r ,说明铁磁物质中,当磁化场退为零后仍保留一定的磁性。这种现象叫磁滞现象, B r 叫剩磁。若要完全消除剩磁B r ,必须加反向磁场,当B=0时磁场的值H c 为铁磁质的矫顽力。 当反向磁场继续增加,铁磁质的磁化达到反向饱和。反向磁场减小到零,同样出现剩磁现象。不断地正向或反向缓慢改变磁场,磁化曲线成为一闭合曲线,这个闭合曲线称为磁滞回线,如图2所示。 3、基本磁化曲线 对于同一铁磁材料,设开始时呈去磁状态,依次选取磁化电流I 1 、 I 2、….I n ,则相应的磁场强度为H 1 、H 2 、….H 3 ,在每一磁化电流下反复交换 电流方向(称为磁锻炼),即在每一个选定的磁场值下,使其方向反复发生 几次变化(如H 1→- H 1 →H 1 →- H 1 ….),这样操作的结果,是在每一个电流
matlab_数学实验_实验报告_数据拟合
数据的分析之数据的拟合 一、实验项目:Matlab 数据拟合 二、实验目的和要求 1、掌握用matlab 作最小二乘多项式拟合和曲线拟合的方法。 2、通过实例学习如何用拟合方法解决实际问题,注意差值方法的区别。 3、鼓励不囿于固定的模式或秩序,灵活调整思路,突破思维的呆板性,找到打破常规的解决方法。并在文献检索 动手和动脑等方面得到锻炼。 三、实验内容 操作一:Malthus 人口指数增长模型 用以上数据检验马尔萨斯人口指数增长模型,根据检验结果进一步讨论马尔萨斯人口模型的改进。 马尔萨斯模型的基本假设是人口的增长率为常数,记为r 。记时刻t 的人口为()x t ,且初始时刻的人口为x 0,于是得到如下微分方程 (0)dx rx dt x x ?=???=? 需要先求微分方程的解,再用数据拟合模型中的参数。 一、分析 有这个方程很容易解出0()*rt x t x e = r>0时,是表示人口箭杆指数规律随时间无限增长,称为指数增长模型。 将上式取对数,可得y=rt+a ,y=lnx ,a=lnx0 二、用matlab 编码 t=1790:10:1980; x=[3.9 5.3 7.2 9.6 12.9 17.1 23.2 31.4 38.6 50.2 62.9 76.0 92 106.5 123.2 131.7 150.7 179.3 204.0 226.5]; p=polyfit(t,log(x),1); r=p(1) x0=exp(p(2)) x1=x0.*exp(r.*t); plot(t,x,'r',t,x1,'b')
三、结果和图像 0.0214r = 0 1.2480016x e =- 1780 1800182018401860188019001920194019601980 050 100 150 200 250 300 350 操练二:旧车价格预测 分析用什么形式的曲线来拟合数据,并预测使用4、5年后的轿车平均价格大致为多少。 一、分析 用matlab 编码绘制出点图,预测图像大致形状。
matlab曲线拟合实例
曲线拟合 求二次拟合多项式 解:(一)最小二乘法MA TLAB编程: function p=least_squar(x,y,n,w) if nargin<4 w=1 end if nargin<3 n=1 end m=length(y); X=ones(1,m) if m<=n error end for i=1:n X=[(x.^i);X] end A=X*diag(w)*X';b=X*(w.*y)';p=(A\b)' 输入: x=[1 3 5 6 7 8 9 10]; y=[10 5 2 1 1 2 3 4] p=least_squar(x,y,2) 运行得: p = 0.2763 -3.6800 13.4320 故所求多项式为:s(x)=13.432-3.68x+0.27632x (二)正交多项式拟合MATLAB编程: function p=least_squar2(x,y,n,w) if nargin<4 w=1; end if nargin<3 n=1; end m=length(x); X=ones(1,m); if m<=n error end for i=1:n X=[x.^i;X]; end A=zeros(1,n+1);
A(1,n+1)=1; a=zeros(1,n+1); z=zeros(1,n+1); for i=1:n phi=A(i,:)*X;t=sum(w.*phi.*phi); b=-sum(w.*phi.*x.*phi)/t a(i)=sum(w.*y.*phi)/t; if i==1 c=0;else c=-t/t1; end t1=t for j=1:n z(j)=A(i,j+1); end z(n+1)=0 if i==1 z=z+b*A(i,:); else z=z+b*A(i,:)+c*A(i-1,:); end A=[A;z]; end phi=A(n+1,:)*X;t=sum(w.*phi.*phi); a(n+1)=sum(w.*y.*phi)/t; p=a*A; 输入: x=[1 3 5 6 7 8 9 10]; y=[10 5 2 1 1 2 3 4]; p=least_squar2(x,y,2) 运行得: b = -6.1250 t1 = 8 z = 0 1 0 b = -4.9328 t1 = 64.8750 z = 1.0000 -6.1250 0 p = 0.2763 -3.6800 13.4320 故所求多项式为:s(x)=13.432-3.68x+0.27632x
铁磁材料的磁滞回线和基本磁化曲线
实验名称:软磁材料磁滞回线和基本磁化曲线的测量 铁磁材料按特性分硬磁和软磁两大类.软磁材料的矫顽力H c 小于100A/m ,常用做电机、电力变压器的铁芯和电子仪器中各种频率小型变压器的铁芯.磁化曲线和磁滞回线是反映铁磁材料磁性的重要特征曲线.矫顽力和饱和磁感应强度B s 、剩磁B r .磁滞损耗P 等参数均可以从磁滞回线和磁化曲线上获得.这些参数是铁磁材料研制、生产、应用是的重要依据. 铁磁材料磁化时,其磁感强度随磁场强度的变化非常复杂.有如下特点: 1.一块从未被磁化的软磁材料磁化时,当H 由0开始逐渐增加至某最大值H m ,B 也由0开始逐渐增加,由此画出的B -H 曲线o -a 称起始磁化曲线,如图1所示. 起始磁化曲线大致分为三个阶段,第一阶段曲线平缓,第二阶段曲线很陡,第三阶段曲线又变得平缓.最后B 趋于不变,这种现象称为饱和.饱和时的磁感强度称为饱和磁感强度,记做B s . 2.磁化过程中材料内部发生的过程是不可逆的,当磁场由饱和时的H m 减小至0,B 并非沿原来的磁化曲线返回,而是滞后于H 的变化.当H =0时,B =B r ,称为剩余磁感应强度.要想使B 为0,就必须施加一反向磁场-H c .H c 称为矫顽力. 继续加大反向磁场至-H m ,曲线到达a ',磁感应强度变为-B s .磁场再由-H m 变至H m ,曲线又回到a ,形成一条闭合曲线,叫磁滞回线. 3.如果初始磁化磁场由0开始增加至一小于H m 的值H 1,然后磁场在- H 1与H 1之间变化,也可以得到一条磁滞回线.但这条曲线不是饱和 的.逐渐增加磁场至H 2,H 3,H 4,…(H 2 铁磁材料的滞回线和基本磁化曲线实验报告记录 ————————————————————————————————作者:————————————————————————————————日期: 南昌大学物理实验报告课程名称:普通物理实验(2) 实验名称:铁磁材料的磁滞回线和基本磁化曲线学院:专业班级: 学生姓名:学号: 实验地点:座位号: 实验时间: 一、实验目的: 1、掌握用磁滞回线测试仪测绘磁滞回线的方法。 2、了解铁磁材料的磁化规律,用示波器法观察磁滞回线比较两种典型铁磁物质的动态磁化特性。 3、测定样品的磁化特性曲线(B-H曲线),并作μ-H曲线。 4、测绘样品在给定条件下的磁滞回线,估算其磁滞损耗以及相关H C、B R、 B M、H、B的等参量。 二、实验仪器: TH—MHC型智能磁滞回线测试仪、示波器。 三、实验原理: 1.铁磁材料的磁滞特性 铁磁物质是一种性能特异,用途广泛的材料。铁、钴、镍及其众多合金以及含铁的氧化物(铁氧体)均属铁磁物质。其特性是在外磁场作用下能被强烈磁化,即磁导率μ很高。另一特征是磁滞,铁磁材料的磁滞现象是反复磁化过程中磁场强度H与磁感应强度B之间关系的特性。即磁场作用停止后,铁磁物质仍保留磁化状态,图1为铁磁物质的磁感应强度B与磁场强度H之间的关系曲线。 图中的原点O表示磁化之前铁磁物质处于磁中性状态,即B=H=O,当磁场强度H从零开始增加时,磁感应强度B随之从零缓慢上升,如曲线Oa,继之B随H迅速增长,如曲线ab所示,其后B的增长又趋缓慢,并当H增至H S时,B达到饱和值B S这个过程的OabS曲线称为起始磁化曲线。如果在达到饱和状态之后使磁场强度H减小,这时磁感应强度B的值也要减小。图1表明,当磁场从H S逐渐减小至零,磁感应强度B并不沿起始磁化曲线恢复到“O”点,而是沿另一条新的曲线SR下降,对应的B值比原先的值大,说明铁磁材料的磁化过程是不可逆的过程。比较线段OS和SR可知,H减小B相应也减小,但B的变化滞后于H的变化,这种现象称为磁滞。磁滞的明显特征是当H=O时,磁感应强度B值并不等于0,而是保留一定大小的剩磁Br。 当磁场反向从0逐渐变至-H D,磁感应强度B消失,说明要消除剩磁,可以施加反向磁场。H D称为矫顽力,它的大小反映铁磁材料保持剩磁状态的能力,曲线RD称为退磁曲线。 图1还表明,当磁场按H S→O→H C→?H S→O→H D′→H S次序变化,相应的磁感应强度B则沿闭合曲线SRDS′R′D′S变化,可以看出磁感应强度B值的变化总是滞后于磁场强度H的变化,这条闭合曲线称为磁滞回线。当铁磁材料 MATLAB机械工程 最小二乘法曲线拟合的应用实例 班级: 姓名: 学号: 指导教师: 一,实验目的 通过Matlab上机编程,掌握利用Matlab软件进行数据拟合分析及数据可视化方法 二,实验内容 1.有一组风机叶片的耐磨实验数据,如下表所示,其中X为使用时间,单位为小时h,Y为磨失质量,单位为克g。要求: 对该数据进行合理的最小二乘法数据拟合得下列数据。 x=[10000 11000 12000 13000 14000 15000 16000 17000 18000 19000 2 0000 21000 22000 23000]; y=[24.0 26.5 29.8 32.4 34.7 37.7 41.1 42.8 44.6 47.3 65.8 87.5 137.8 174. 2] 三,程序如下 X=10000:1000:23000; Y=[24.0,26.5,29.8,32.4,34.7,37.7,41.1,42.8,44.6,47.3,65.8,87.5,137.8,17 4.2] dy=1.5; %拟合数据y的步长for n=1:6 [a,S]=polyfit(x,y,n); A{n}=a; da=dy*sqrt(diag(inv(S.R′*S.R))); Da{n}=da′; freedom(n)=S.df; [ye,delta]=polyval(a,x,S); YE{n}=ye; D{n}=delta; chi2(n)=sum((y-ye).^2)/dy/dy; end Q=1-chi2cdf(chi2,freedom); %判断拟合良好度 clf,shg subplot(1,2,1),plot(1:6,abs(chi2-freedom),‘b’) xlabel(‘阶次’),title(‘chi2与自由度’) subplot(1,2,2),plot(1:6,Q,‘r’,1:6,ones(1,6)*0.5) xlabel(‘阶次’),title(‘Q与0.5线’) nod=input(‘根据图形选择适当的阶次(请输入数值)’); elf,shg, plot(x,y,‘kx’);xlabel(‘x’),ylabel(‘y’); axis([8000,23000,20.0,174.2]);hold on errorbar(x,YE{nod},D{nod},‘r’);hold off title(‘较适当阶次的拟合’) text(10000,150.0,[‘chi2=’num2str(chi2(nod))‘~’int2str(freedom(nod))]) 铁磁材料的磁滞回线和基本磁化曲线 【实验目的】 1.认识铁磁物质的磁化规律,比较两种典型的铁磁物质的动态磁化特性。 2. 测定样品的基本磁化曲线,作μ -H曲线。 3.测定样品的H D、B r、B S和(H m·B m)等参数。 4.测绘样品的磁滞回线,估算其磁滞损耗。 【实验仪器】 DH4516型磁滞回线实验仪,数字万用表,示波器。 【实验原理】 铁磁物质是一种性能特异,用途广泛的材料。铁、钴、镍及其众多合金以及含铁的氧化物(铁氧体)均 属铁磁物质。其特征是在外磁场作用下能被强烈磁化,故磁导率μ很高。另一特征是磁滞,即磁化场作用停止后,铁磁质仍保留磁化状态,图1为铁磁物质的磁感应强度B与磁化场强度H之间的关系曲线。 图中的原点O表示磁化之前铁磁物质处于磁中性状态,即B=H=O,当磁场H从零开始增加时,磁感应强度B随之缓慢上升,如线段oa所示,继之B随H迅速增长,如ab所示,其后B的增长又趋缓慢,并当H 增至H S时,B到达饱和值B S,oabs称为起始磁化曲线。图1表明,当磁场从H S逐渐减小至零,磁感应强度B 并不沿起始磁化曲线恢复到“O”点,而是沿另一条新的曲线SR下降,比较线段OS和SR可知,H减小B 相应也减小,但B的变化滞后于H的变化,这现象称为磁滞,磁滞的明显特征是当H=O时,B不为零,而保 留剩磁Br。 当磁场反向从O逐渐变至-H D时,磁感应强度B消失,说明要消除剩磁,必须施加反向磁场,H D称 为矫顽力,它的大小反映铁磁材料保持剩磁状态的能力,线段RD称为退磁曲线。 图1还表明,当磁场按H S→O→H D→-H S→O→H D′→H S次序变化,相应的磁感应强度B则沿闭合曲线SRDS' R'D'S 变化,这闭合曲线称为磁滞回线。所以,当铁磁材料处于交变磁场中时(如变压器中的铁心),将沿磁滞回线反复被磁化→去磁→反向磁化→反向去磁。在此过程中要消耗额外的能量,并以热的形式从铁磁 材料中释放,这种损耗称为磁滞损耗,可以证明,磁滞损耗与磁滞回线所围面积成正比。 《数学建模期末实验作业》 院系:数学学院 专业:信息与计算科学 年级:2014级 试题编号:37 胡克定律的综合评价分析 背景摘要: 利用一个打蛋器和一个物理学公式,毁掉一面六英寸厚的承重墙,这么天 方夜谭的事你能相信吗?但它却真的发生了! 《越狱》这一电视剧相信很多人都耳熟,即使没看过里面的内容,但应该 都曾经听过它的大名。在《越狱》第一季第六集中,Michael要通过地下管道 爬到医务室的下面,但是一条重要通道是被封死的,因此必须要把这个封死的 墙破坏掉,由于是混凝土结构,因此破坏起来很难,Michael从纹身上拓下魔 鬼的画像,投影在掩住管道入口的墙上,用“胡克定律”计算出最佳位置,再 用小巧的打蛋器在承重墙上钻出了几个小洞,最后借助这几个小洞毁掉了这堵 承重墙。 相信大多数人都觉的很梦幻很不科学,但事实就是这样的令人惊讶。搜狐 娱乐曾经报道过,有《越狱》粉丝不相信这一情节,在现实生活中进行实验, 结果真的重现了“胡克定律”凿墙这一情节。 胡克定律的表达式为F=k·x或△F=k·Δx,其中k是常数,是物体的劲度(倔强)系数。在国际单位制中,F的单位是牛,x的单位是米,它是形变量(弹性形变),k的单位是牛/米。倔强系数在数值上等于弹簧伸长(或缩短) 单位长度时的弹力。 弹性定律是胡克最重要的发现之一,也是力学最重要基本定律之一。在现代,仍然是物理学的重要基本理论。胡克的弹性定律指出:弹簧在发生弹性形 变时,弹簧的弹力Ff和弹簧的伸长量(或压缩量)x成正比,即F= -k·x。k 是物质的弹性系数,它由材料的性质所决定,负号表示弹簧所产生的弹力与其 伸长(或压缩)的方向相反。 但当我们进行多次实验,便会发现随着F的逐步增大,便不再服从胡克定律。为此我们应当运用插值与拟合的内容,探索更加准确的公式。 一、建模问题 1.问题提出 1.1 问题背景 弹簧在压力F 的作用下伸长x,一定范围内服从胡克定理:F与x成正比,即F=kx。现在得到下面一组F,x数据,并在(x,F)坐标下作图,可以看到 当F大到一定数据值后,就不服从这个定律了。 表1-1 姓名:易常瑞 学号: 5502211043 班级: 应用物理学11班 班级编号:s008 实验时间:第十周星期三13:00座位号:8 教师编号:T042 五、数据处理 基本磁化曲线与μ—H 曲线(R 1=3Ω) μ—H 曲线 |?/(H /m ) H/(A/m) 姓名:易常瑞学号: 5502211043 班级:应用物理学11班班级编号:s008 实验时间:第十周星期三13:00座位号:8 教师编号:T042 基本磁化曲线 磁滞回线(U=1.0v, R1=2.5Ω) 姓名:易常瑞学号: 5502211043 班级:应用物理学11班班级编号:s008 实验时间:第十周星期三13:00座位号:8 教师编号:T042 磁滞回 线 由磁滞回线所谓的面积可知,磁滞损耗为[HB]=2.7(T?A/m) 饱和磁感应强度B s=1.273333333(T) 矫顽力H D=115.3333333(A/m) 剩磁R r=0.366666667(T) 相关已知量:N=50,L=60mm n=150,s=80mm2,c1=c2=20μF,R2=10kΩ 相关公式:H=NR1 L U1,B=c2R2 ns U2 六、误差分析 本实验的最大误差可能就来源于我的读数,因为本来是以大格为标准读的,而我以小格为标准读,因为所要读的点本来就比较大,如果再读的那么精确的话,反而会使误差增大,看一下我所画出来的磁滞回线就知道了,并不是那么圆滑。 还有一个误差就是第一个表格,因为很多的电压和电阻情况下都无法将所有的一组数据记录完整,因此为了达到这个目的,必须将初始值的图像调得非常小,这就带来了读数误差,再一个就是后面几个数据由于图像并不是很好而带来误差。因此,在测量时,应适当改变横向或纵向电压,已达到获得较好读数的目的。 物理实验报告铁磁材料的磁滞回线和基本磁化 曲线 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】 实验20铁磁材料的磁滞回线及基本 磁化曲线 铁磁物质是一种性能特异、用途广泛的材料。如航天、通信、自动化仪表及控制等都无不用到铁磁材料(铁、钴、镍、钢以及含铁氧化物均属铁磁物质)。因此,研究铁磁材料的磁化性质,不论在理论上,还是在实际应用上都有重大的意义。本实验使用单片机采集数据,测量在交变磁场的作用下,两个不同磁性能的铁磁材料的磁化曲线和磁滞回线。 【预习重点】 (1)看懂实验原理图及接线图。 (2)复习示波器的使用方法。 参考书:《电磁学》下册,赵凯华、陈熙谋着,第五、六章;《大学物理学》电磁学部分,杨仲耆等编,第六章。 【仪器】 磁滞回线实验组合仪、双踪示波器。 【原理】 1)铁磁材料的磁化及磁导率 铁磁物质的磁化过程很复杂,这主要是由于它具有磁滞的特性。一般都是通过测量磁化场的磁场强度H和磁感应强度B之间的关系来研究其磁性规律的。 图20—1起始磁化曲线和磁滞回线 图20—2基本磁化曲线 当铁磁物质中不存在磁化场时,H和B均为零,即图20—1中B~H曲线的坐标原点0。随着磁化场H的增加,B也随之增加,但两者之间不是线性关系。当H增加到一定值时,B不再增加(或增加十分缓慢),这说明该物质的磁化已达到饱和状态。Hm 和Bm 分别为饱和时的磁场强度和磁感应强度(对应于图中a点)。如果再使H逐渐退到零,则与此同时B也逐渐减少。然而H和B对应的曲线轨迹并不沿原曲线轨迹a0返回,而是沿另一曲线ab下降到Br ,这说明当H下降为零时,铁磁物质中仍保留一定的磁性,这种现象称为磁滞,Br 称为剩磁。将磁化场反向,再逐渐增加其强度,直到H=-Hc ,磁感应强度消失,这说明要消除剩磁,必须施加反向磁场Hc 。Hc 称为矫顽力。它的大小反映铁磁材料保持剩磁状态的能力。图20—1表明,当磁场按Hm →0→-H c →-Hm →0→Hc →Hm 次序变化时,B所经历的相应变化为Bm →Br →0 →-Bm →-Br →0→Bm 。于是得到一条闭合的B~H曲线,称为磁滞回线。所以,当铁磁材料处于交变磁场中时(如变压器中的铁心),它将沿磁滞回线反复被磁化→去磁→反向磁化→反向去磁。在此过程中要消耗额外的能量,并以热的形式从铁磁材料中释放,这种损耗称为磁滞损耗。可以证明,磁滞损耗与磁滞回线所围面积成正比。 应该说明,对于初始态为H=0,B=0的铁磁材料,在交变磁场强度由弱到强依次进行磁化的过程中,可以得到面积由小到大向外扩张的一簇磁滞回线,如图20—2所示。这些磁滞回线顶点的连线称 曲线拟合及其应用综述 摘要:本文首先分析了曲线拟合方法的背景及在各个领域中的应用,然后详细介绍了曲线拟合方法的基本原理及实现方法,并结合一个具体实例,分析了曲线拟合方法在柴油机故障诊断中的应用,最后对全文内容进行了总结,并对曲线拟合方法的发展进行了思考和展望。 关键词:曲线拟合最小二乘法故障模式识别柴油机故障诊断 1背景及应用 在科学技术的许多领域中,常常需要根据实际测试所得到的一系列数据,求出它们的函数关系。理论上讲,可以根据插值原则构造n 次多项式Pn(x),使得Pn(x)在各测试点的数据正好通过实测点。可是, 在一般情况下,我们为了尽量反映实际情况而采集了很多样点,造成了插值多项式Pn(x)的次数很高,这不仅增大了计算量,而且影响了函数的逼近程度;再就是由于插值多项式经过每一实测样点,这样就会保留测量误差,从而影响逼近函数的精度,不易反映实际的函数关系。因此,我们一般根据已知实际测试样点,找出被测试量之间的函数关系,使得找出的近似函数曲线能够充分反映实际测试量之间的关系,这就是曲线拟合。 曲线拟合技术在图像处理、逆向工程、计算机辅助设计以及测试数据的处理显示及故障模式诊断等领域中都得到了广泛的应用。 2 基本原理 2.1 曲线拟合的定义 解决曲线拟合问题常用的方法有很多,总体上可以分为两大类:一类是有理论模型的曲线拟合,也就是由与数据的背景资料规律相适应的解析表达式约束的曲线拟合;另一类是无理论模型的曲线拟合,也就是由几何方法或神经网络的拓扑结构确定数据关系的曲线拟合。 2.2 曲线拟合的方法 解决曲线拟合问题常用的方法有很多,总体上可以分为两大类:一类是有理论模型的曲线拟合,也就是由与数据的背景资料规律相适应的解析表达式约束的曲线拟合;另一类是无理论模型的曲线拟合,也就是由几何方法或神经网络的拓扑结构确定数据关系的曲线拟合。 2.2.1 有理论模型的曲线拟合 有理论模型的曲线拟合适用于处理有一定背景资料、规律性较强的拟合问题。通过实验或者观测得到的数据对(x i,y i)(i=1,2, …,n),可以用与背景资料规律相适应的解析表达式y=f(x,c)来反映x、y之间的依赖关系,y=f(x,c)称为拟合的理论模型,式中c=c0,c1,…c n是待定参数。当c在f中线性出现时,称为线性模型,否则称为非线性模型。有许多衡量拟合优度的标准,最常用的方法是最小二乘法。 2.2.1.1 线性模型的曲线拟合 线性模型中与背景资料相适应的解析表达式为: ε β β+ + =x y 1 (1) 式中,β0,β1未知参数,ε服从N(0,σ2)。 将n个实验点分别带入表达式(1)得到: i i i x yε β β+ + = 1 (2) 式中i=1,2,…n,ε1, ε2,…, εn相互独立并且服从N(0,σ2)。 根据最小二乘原理,拟合得到的参数应使曲线与试验点之间的误差的平方和达到最小,也就是使如下的目标函数达到最小: 2 1 1 ) ( i i n i i x y Jε β β- - - =∑ = (3) 将试验点数据点入之后,求目标函数的最大值问题就变成了求取使目标函数对待求参数的偏导数为零时的参数值问题,即: ) ( 2 1 1 = - - - - = ? ?∑ = i i n i i x y J ε β β β (4) 数学实验报告 学生姓名 学科专业 任课教师 所在学院 报告提交日期 实验一斐波那契数列 (一)练习题1 一.实验目的: 学会用MATLAB研究调和级数的变化规律及其性质。 学会用MATLAB进行数据的拟合以及图像的绘制。 1.研究调和级数 观察调和级数的部分数列的折线图。 实验方法: 根据调和级数部分和数列公式:生成以n为自变量和以其 部分数列为因变量的曲线。 代码如下: function fib1(n) fn=1; for i=2:n; fn=[fn,fn(i-1)+1./i]; end plot(fn) 实验过程: 选择n=1000,调用上述函数画图,图形如下。 选择n=10000,调用上述函数画图,图形如下。 得出结论: 由其图可知在n=1000和n=10000时有明显上升,是递增数列,不收敛 问题二: 数列:的变化规律,猜测其是否有极限。 实验方法: 由公式,生成以n为自变量和以其部分数列为因变量的曲线。 代码如下: function fib2(n) fn=1; hn=0.5; for i=2:2*n; fn=[fn,fn(i-1)+1./i]; end for j=2:n; hn=[hn,fn(2*j)-fn(j)]; end plot(hn) 实验过程:选择n=10000,调用上述函数画图,图形如下 得出结论:的增长在n较小时增长速度很快,但当n时,大致收敛 于。 问题三: 数列:的变化规律,寻找恰当的函数拟合。 实验方法: 由公式,生成以n为自变量和以其部分数列为因变量 的曲线。 代码如下: function fib3(n) fn=1; gn=1.5; for i=2:2*n; fn=[fn,fn(i-1)+1./i]; end for j=2:n; gn=[gn,fn(2*j)]; end plot(gn) 实验过程:选择n=10000,调用上述函数画图,图形如下 实验题目:铁磁材料的磁滞回线和基本磁化曲线 实验目的:认识铁磁物质的磁化规律;测定样品的基本磁化规律,作μ-H 曲线;计算样品的H c 、B r 、B m 和(H m ,B m )等参数;测绘样品的磁滞回线,估算其磁带损耗。 实验原理:铁磁物质在外磁场作用下被强烈磁化,故磁导率μ很 大;在磁化场作用停止后,铁磁质可以保留磁化状态。 以B 为纵轴,H 为横轴作图,原点表示磁化之前物质 处于磁中性状态,B=H=0,当H 开始增加时,B 随之增加。如右上图中a ,称为起始磁化曲线。当H 从H m 减小时,B 沿滞后于H 的曲线SR 减小,这就是磁滞现象。当H=0时,B=B r 称为保留剩磁。当B=0时,H=-H c ,H c 称为矫顽力。 当磁场沿H m →0→-H c →-H m →0→H c →H m 次序变化时, 相应的B 沿一条闭合曲线变化(右上图),这个曲线就 是磁滞回线。若铁磁材料在交变电场中不断反复被磁 图一:磁滞回线 化、去磁化,那么材料在这个过程中要消耗额外的能 量,称为磁滞损耗,其值与磁滞回线面积成正比。 磁滞回线的顶点的连线称为基本磁化曲线(右下图)。 图二:基本磁化曲线 实验内容: 1、将仪器的连线连接好,开启仪器; 2、退磁后,将额定电压调至3.0V ,测量铁磁质的磁滞回线; 3、将电压从0.5V 逐渐调至3.0V ,依次得到B m 、H m ,从而得到铁磁质的基本磁化曲线。 实验数据: 表一:磁滞回线数据 基本磁化曲线: 表二:基本磁化曲线数据 数据处理: 磁滞回线 根据数据作图得: 从图中大致得到:B m=0.604T;H m=194.0A/m;B r=0.183T;H c=37.3A/m。基本磁化曲线 根据数据作图得: 实验26 铁磁材料磁滞回线和基本磁化曲线的测量 铁磁性材料分为硬磁材料和软磁材料。软磁材料的矫顽力小于100A/m ,常用于电机、电力变压器的铁芯和电子仪器中各种频率小型变压器的铁芯。铁磁材料的磁化过程和退磁过程中磁感应强度和磁场强度是非线性变化的,磁滞回线和基本磁化曲线是反映软磁材料磁性的重要特性曲线。矫顽力、饱和磁感应强度、剩余磁感应强度、初始磁导率、最大磁导率、磁滞损耗等参数均可以从磁滞回线和基本磁化曲线上获得,这些参数是磁性材料研制、生产和应用的总要依据。采用直流励磁电流产生磁化场对材料样品反复磁化测出的磁滞回线称为静态磁滞回线;采用交变励磁电流产生磁化场对材料样品反复磁化测出的磁滞回线称为动态磁滞回线。本实验利用交变励磁电流产生磁场对不同性能的铁磁材料进行磁化,测绘基本磁化曲线和动态磁滞回线。 【实验目的】 ①了解用示波器显示和观察动态磁滞回线的原理和方法。 ②掌握测绘铁磁材料动态磁滞回线和基本磁化曲线的原理和方法,加深对铁磁材料磁化规律的理解。 ③学会根据磁滞回线确定矫顽力 、剩余磁感应强度 、饱和磁感应强度 、磁滞损耗等磁化参数。 【实验仪器与用具】 FB310型动态磁滞回线实验仪,双踪示波器,导线。 【实验原理】 1.磁性材料的磁化特性及磁滞回线 研究磁性材料的磁化规律时,一般是通过测量磁化场的磁场强度H 与磁感应强度B 之间的关系来进行的。铁磁性材料磁化时,它的磁感应强度B 要随磁场强度H 变化而变化。但是B 与H 之间的函数关系是非常复杂的。主要特点如下: (1)当磁性材料从未磁化状态(H =0且B =0)开始磁化时,B 随H 的增加而非线性增加由此画出的H B 曲线称为起始磁化曲线,如图3.26.1(O-a )段曲线。起始磁化曲线大致分为三个阶段,第一阶段曲线平缓,第二阶段曲线较陡,第三阶段曲线又趋于平缓。最后当H 增大到一定值m H 后,B 增加十分缓慢或基本不再增加,这时磁化达到饱和状态,称为磁饱和。达到磁饱和时的m H 和s B 分别称为饱和磁场强度和饱和磁感应强度,对应图3.26.1中的a 点。铁磁材料的滞回线和基本磁化曲线实验报告记录
Matlab最小二乘法曲线拟合的应用实例
铁磁材料的磁滞回线和基本磁化曲线
数学建模:最小二乘拟合实验
磁滞回线与基本磁化曲线
物理实验报告铁磁材料的磁滞回线和基本磁化曲线
1、曲线拟合及其应用综述
数学实验1数据拟合 (2)
铁磁材料的磁滞回线和基本磁化曲线实验报告
铁磁材料磁滞回线和基本磁化曲线的测量