FANUC系统PMC的功能指令
FANUC 系统PMC 的功能指令
1.1.1 顺序程序结束指令
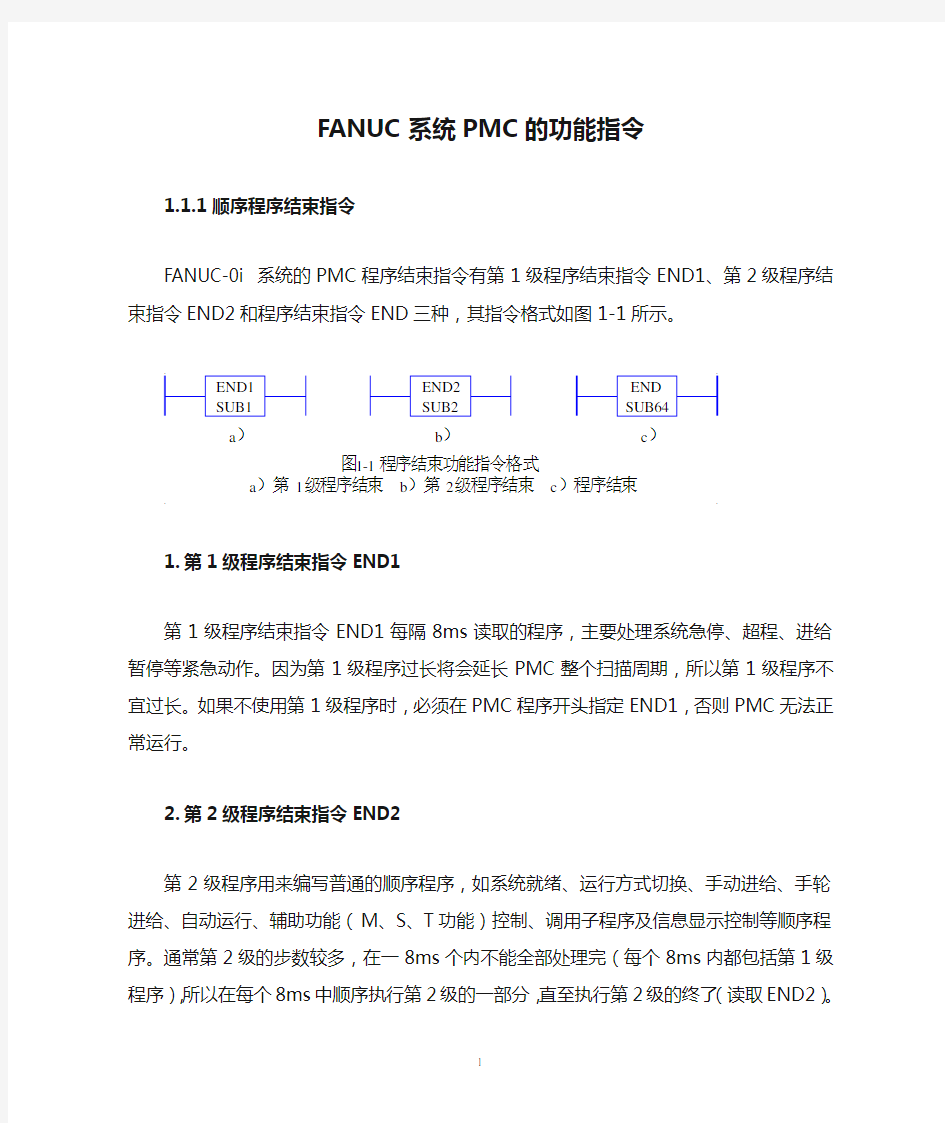
FANUC-0i 系统的PMC 程序结束指令有第1级程序结束指令END1、第2级程序结束指令END2和程序结束指令END 三种,其指令格式如图1-1所示。
SUB64END SUB1END1SUB2END2图1-1 程序结束功能指令格式
a )第 1 级程序结束
b )第 2 级程序结束
c )程序结束
.
.
.
.
a )
b )
c )
1. 第1级程序结束指令END1
第1级程序结束指令END1每隔8ms 读取的程序,主要处理系统急停、超程、进给暂停等紧急动作。因为第1级程序过长将会延长PMC 整个扫描周期,所以第1级程序不宜过长。如果不使用第1级程序时,必须在PMC 程序开头指定END1,否则PMC 无法正常运行。
2. 第2级程序结束指令END2
第2级程序用来编写普通的顺序程序,如系统就绪、运行方式切换、手动进给、手轮进给、自动运行、辅助功能(M 、S 、T 功能)控制、调用子程序及信息显示控制等顺序程序。通常第2级的步数较多,在一8ms 个内不能全部处理完(每个8ms 内都包括第1级程序),所以在每个8ms 中顺序执行第2级的一部分,直至执行第2级的终了(读取END2)。在第2级程序中,因为有同步输入信号存储器,所以输入脉冲信号的信号宽度应大于PMC 的扫描周期,否则顺序程序会出现误动作。
3. 程序结束指令END
将重复执行的处理和模式化的程序作为子程序登录,然后用CALL 或CALLU 命令由第2级程序调用。包含子程序PMC 的梯形图的最后必须用END 指令结束。
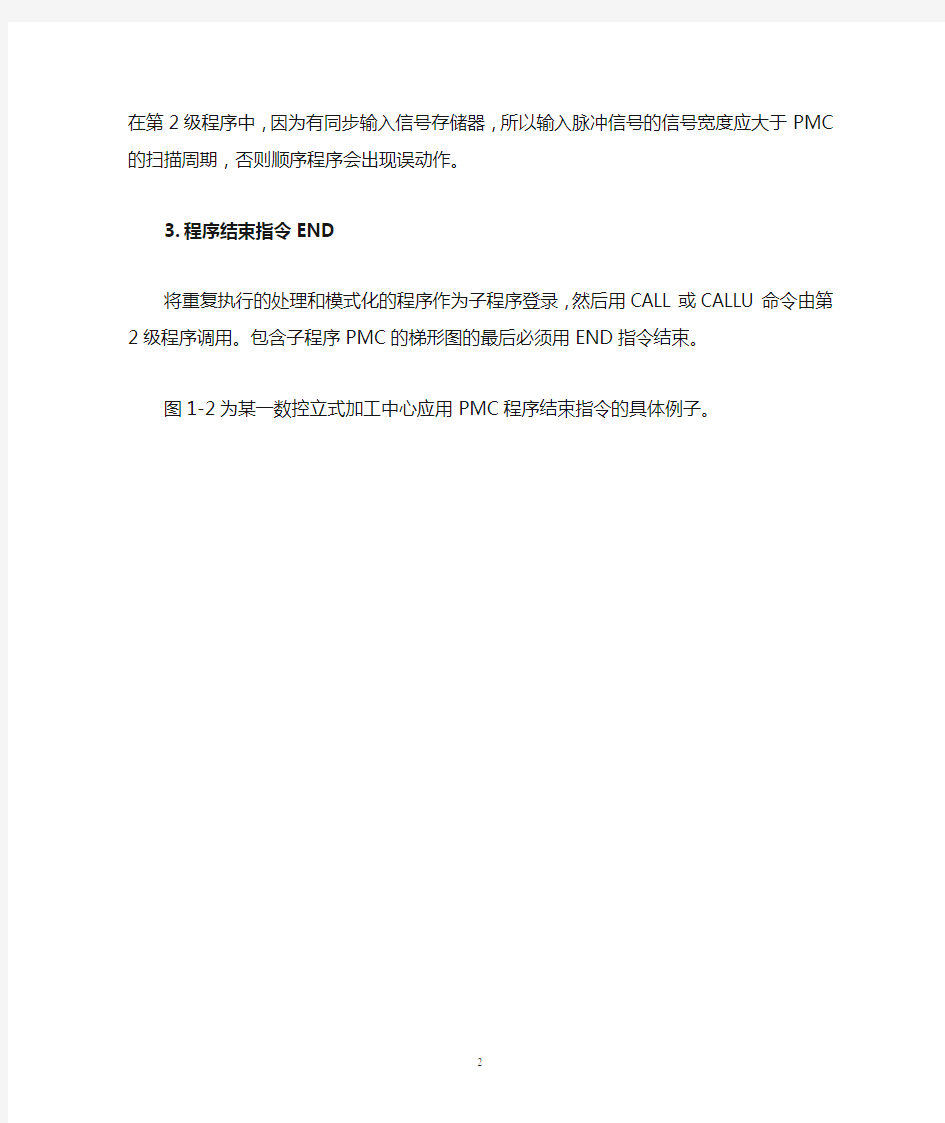
图1-2为某一数控立式加工中心应用PMC 程序结束指令的具体例子。
..)(X1008.4R800.0*ESP.M F1.7MA X56.0
CALL K9.1
.
X60.1 X1003.0
系统急停
.
.
.
.
G8.4SUB64
END SUB2END2图1-2 PMC 程序结束指令的应用
.F0.6F45.0*ESP ALM.A .
)(G71.1
SA
*ESPA *LOT
垂直轴(Z 轴).
)
(Y1002.0*SPPB )
(G8.5
*SP
)
(R800.0
*LOT
. X1003.2. X1003.4. X1003.1. X1003.3.
X1003.5*+XOT *+YOT *+ZOT *-XOT *-YOT *-ZOT SUB1
END1MLK.M X1006.6)(G44.1
MLK
SUB65CALL ATCPCA
P100R800.0
)
(A0.0
…
…
SUB71SP ATCPCA
P100SUB72SPE …
制动线圈
.
主轴急停
.进给保持
.
机床超程
.
机床锁住
.
1000
.
机床超程报警
.
换刀子程序.
(PMC 轴控制)
.
.
.
..
1.1.2 定时器指令
1. 可变定时器(TMR )
TMR 指令的定时时间可通过PMC 参数进行更改,指令格式和工作原理如图1-3所示。指令格式包括三部分,分别是控制条件、定时器号、定时继电器。
ACT
TM01
000.0
000.0
控制条件指令定时器号定时继电器
a )
b )
→
→
ACT
TM01
设定时间
图1-3 可变定时器的指令格式和工作原理
a )指令格式
b )定时器工作
.
.
.
)
(TMR SUB3
00
控制条件:当ATC = 0 时,输出定时继电器TM01 = 0;当ATC = 1 时,经过设定延时时间后,输出定时继电器TM01 = 1。
定时器号:PMC-SA3为1 ~ 40个,其中1 ~ 8号最小单位为48ms (最大为1572.8秒);9号以后最小单位为8ms (最大为262.1秒)。定时器的时间在PMC 参数中设定(每个定时器占两个字节,以十进制数直接设定)。
定时继电器:作为可变定时器的输出控制,定时继电器的地址由机床厂家设计者决定,一般采用中间继电器。
定时器工作原理如图1-1b 所示。当ACT=1时,定时器开始计时,到达预定的时间后,定时继电器TM01接通;当ACT=0时,定时继电器TM01断开。
图1-4为某数控机床利用定时器实现机床报警灯闪烁的例子 图1-4中X1008.4为机床急停报警,R600.3为主轴报警,R600.4为机床超程报警,R600.5为润滑系统油画过低(润滑油不足)报警,R600.6为自动换刀装置故障报警,R600.7为自动加工中机床防护门打开报警,当上面任何一个报警信号输入时,机床报警灯(Y1000.0)都闪亮(间隔时间为5s )。通过参数PMC 的定时器设定画面分别输入定时器01、02的时间设定值(5000ms )。
.
.)
(X1008.4R600.1*EXP R600.3SPER R600.4
TM01
LITER
.
R600.5 OLOW R600.6TERDR R600.7DOI R600.2TM02R600.1TM01
TMR SUB301
TMR SUB3
02
)
()
(机床报警灯
R600.2
TM02
R600.1
TM01定时器1(5s )
定时器2(5s )
.
.
.
.
Y1000.0
MALM
图1-4 实现机床报警灯闪烁的梯形图
2. 固定定时器(TMRB )
在梯形图中设定TMRB 的时间,在指令和定时器号的后面加上一项预设定时间参数,与顺序程序一起被写入FROM 中,因此定时器的时间不能用PMC 参数改写。固定定时器一般用于机床固定时间的延时,不需要用户修改时间。如机床换刀的动作时间、机床自动润滑时间等的控制。图1-5为固定定时器的指令格式和应用实例。
图1-5 固定定时器的指令格式和应用实例设定时间
ACT 控制条件
X000.0
a )
TMRB SUB24定时器号TMRB SUB24
0001)
()(T03定时器R000.0
b )
b )固定定时器的应用
5000a )指令格式继电器
.
..
.
.
固定定时器的指令格式如图1-5a 所示,包括以下几部分:
控制条件:当ACT=0时,输出定时继电器TM03=0。当ACT=1时,设定延时时间后,输出定时继电器TM03=1。
定时器号:PMC-SA3共有100个,编号为001~100。
设定时间:设定时间的最小单位为8ms ,设定范围为8~262136ms 。
定时继电器:作为可变定时器的输出控制,定时继电器的地址由机床厂家决定,一般采用中间继电器。
图1-5b 为应用实例,表示当X000.0为1时,经过5000ms 的延时,定时继电器R000.0为“1”。
1.1.3 计数器指令
计数器主要功能是进行计数,可以是加计数,也可以是减计数。计数器的预置值形式是BCD 代码还是二进制代码形式由PMC 的参数设定(一般为二进制代码)。
图1-6 为计数器的指令格式和计数器加工工件数的应用:
CNO UPDOWN
..RST
.
.ACT .
.)
(W1
计数器输出
CTR
SUB5
计数器号
图1-6 计数器的指令格式和应用举例
a )
b )
b )计数器用于计数加工工件应用
a )指令格式R9091.1R9091.0
.
.X56.0
.
.Y6.0 .
.)
(Y6.0
CTR
SUB5
0001
R0.3
M30X
1. 计数器的指令格式
计数器的指令格式如图1-6a 所示,包括如下各项: 指定初始值(CNO ):CNO = 0,计数器的计数从0开始;CNO = 1,计数器的计数从1开始。
指定加或减计数(UPDOWN ):UPDOWN = 0,指定为加1计数器;UPDOWN = 1,指定为减1计数器。
复位(RST ):RST = 0,解除复位;RST = 1,计数器复位到初始值。 控制条件(ACT ):ACT = 0,计数器不执行;ACT = 1,从0变成1的上升沿计数。
计数器号:FANUC 系统PMC-SA3的计数器有20个(00 ~ 19),PMC-SB7的计数器有100个(000 ~ 099)。每个计数器占用系统内部断电保持寄存器4个字节(计数器的预置值占两个字节,当前计数值占两个字节)。
计数器输出(W1):当计数器为加计数器时,计数器计数到预置值,输出W1 = 1;当计数器为减计数器时,计数器计数到初始值,输出W1 = 1。计数器的输出地址由厂家来决定。
2.计数器在数控机床PMC 控制上的应用
计数器可以实现自动计数加工工件的件数;作为分度工作台的自动分度控
制及加工中心自动换刀装置中的换刀位置自动检测控制等。
图1-6b 为自动计数加工件数的PMC 控制。其中R9091.0为逻辑0,X56.0为机床面板加工件数的复位开关,Y6.0为机床加工结束灯,R0.3为加工程序结束信号(M30)。计数器的初始值CNO 为0(逻辑0指定),加工件数从0开始计数;加减计数形式UPDOWN 为0(逻辑0指定),即指定计数器为加计数。通过PMC 参数画面设定计数器1的预置值为100(如果加工100件)。每加工一个工件,通过加工程序结束指令M30(R0.3)进行计数器加1累计,当加工100件时,计数器的计数值累计到100,计数器输出Y6.0为1,通知操作者加工结束,并通过Y6.0的常闭点切断计数器的计数控制。如果重新进行计数,可通过机床面板的复位开关X56.0进行复位,当X56.0为1时,计数器输出Y6.0变成0,计数器重新计数。
1.1.4 译码指令
数控机床在执行加工程序中规定的M 、S 、T 功能时,CNC 装置以BCD 或二进制代码形式输出M 、S 、T 代码信号。这些信号需要经过译码才能从BCD 或二进制状态转换成具有特定功能含义的一位逻辑状态。根据译码形式不同,PMC 译码指令分为BCD 译码指令DEC 和二进制译码指令DECB 两种。
1. D EC 指令
DEC 指令的功能是,当两位BCD 代码与给定值一致时,输出为“1”;不一致时,输出为“0”。DEC 指令主要用于数控机床的M 码、T 码的译码。一条DEC 译码指令只能译一个代码。
图1-7 为DEC 译码指令格式和应用举例。
图1-7 DEC 译码指令格式和应用举例
译码方式
ACT
控制
F7.0a )
DEC SUB4译码信号地址DEC SUB4F10)
()(W1
定时器R300.3
b )
b )译码指令DEC 的应用
0311a )指令格式继电器
.
.
F7.0DEC SUB4F10)
(R300.4
0411F7.0DEC SUB4
F10)
(R300.5
0511
控制F1.3M03X M04X M05X
MF MF MF DEN
M03
M04
M05
DEC 指令格式如图1-7a 所示,包括以下几部分:
控制条件:ACT = 0,不执行译码指令;ACT = 1,执行译码指令。 译码信号地址:指定包含两位BCD 代码信号的地址。
译码方式:译码方式包括译码数值和译码位数两部分。译码数值为要译码的两位BCD 代码;译码位数01为只译低4位数、10为只译高4位数、11为高低位均译。
译码输出:当指定地址的译码数与要求的译码值相等时为1,否则为0。 图1-7b 中,当执行加工程序的M03、M04、M05时,R300.3、R300.4、R300.5
分别为1,从而实现主轴正转、反转及主轴停止自动控制。其中F7.0为M码选通信号,F1.3为移动指令分配结束信号,F10为FANUC-16/18/0i系统的M码输出信号地址。
2.D ECB
fanucpmc的操作
FANUC PMC的操作一:PMC的软键布局 PMC画面的进入 [SYSTEM]→[PMC] [PMCLAD]:梯形图的监控与编辑画面 ↓ 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC信号的诊断 ↓
[TITLE]:标题画面 [STATUS]:信号状态画面 [ALARM]: PMC报警画面 [TARCE]: PMC信号追踪画面 [I/OCHK]: IO LINK诊断画面 [PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DATA] :数据表画面 [SETING]:参数设定画面 [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC)↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑
[MODULE]: IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]: PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码 [MONIT]:在线监控画面 ↓
FANUCPMC立加FG信大全
F A N U C P M C立加F G 信大全 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
加工中心PMC用到的GF指令大全 完成信号辅助功能锁住信号倍率取消信号自动运行启动信号存储行程极限1切换信号 *IT---所有轴互锁信号 *ESP---紧急停止信号 *SP---自动运行停止信号 复位信号外部复位信号 G10,G11---*JV 0~*JV15手动进给速度倍率信号 G12---*FV0~*FV7---进给速度倍率信号 ,,ROV2---快速移动倍率信号 ,,,HA1B,HS1C---手轮轴选信号 ,,MP2---手轮增量进给信号手动快速移动选择信号 速度到达信号 *SSTP---主轴停止信号 G30---SOV0~SOV7---主轴速度倍率信号 ,,,MD2,MD4---方式选择信号 运行选择信号手动参考点返回选择信号 跳段信号所有轴机床锁住信号 G45---BDT2~BDT9---跳段信号单段信号 ,,,,KEY2,KEY3,KEY4---存储器保护信号 空运行信号 刚性攻丝信号反向旋转指令信号(串行主轴) 正向旋转指令信号(串行主轴)主轴定向(串行主轴) 机械准备就绪信号(串行主轴)报警复位信号(串行主轴) *ESPA---主轴急停(串行主轴) ,,,+J1,+J2,+J3,+J4---XYZA轴正向信号 ,,,,--J2,-J3,--J4---XYZA轴负向信号 ,,MI2---镜像信号轴锁住信号 轴伺服关断信号 ,,,*IT1,*IT2,*IT3,*IT4---XYZA互锁信号 —自动运行休止中信号自动运行启动中信号 伺服准备就绪信号报警中信号复位中信号 电池报警信号分配结束信号主轴使能信号 准备就绪信号空运行确认 手轮确认确认确认 确认自动确认编辑确认 跳段确认所有轴锁住确认单段确认 辅助功能锁住确认返回参考点确认 复位辅助功能选通主轴功能选通 刀具功能选通 F10---辅助功能代码 F26---刀具功能代码 ~~R12O---主轴12位速度代码信号 报警信号(串行主轴)速度0信号(串行主轴)速度检测信号(串行主轴)速度到达信号(串行主轴)定向完成信号(串行主轴) 软式操作面板开关信号刚性攻丝方式中信号 ,,,,ZP2,ZP3,ZP4----XYZA参考点返回完成信号
FANUC系统部分操作面板简介
;k;lm/n 部分面板按键功能说 明(FANUC) 一、FANUC0系统MDI面板: FANUC0系统MDI面板各键功能说明表 键名称功能说明 RESET 复位键按下此键,复位CNC系统,包括取消报警、主轴故障复位、中 途退出自动操作循环和输入、输出过程等。 OUTPT START 输出启动键按下此键,CNC开始输出存中的参数或程序到外部设备。 地址和数字键按下这些键,输入字母、数字和其它字符。 INPUT 输入键除程序编辑方式以外的情况,当面板上按下一个字母或数字键 以后,必须按下此键才能输入到CNC。另外,与外部设备通信时, 按下此键,才能启动输入设备,开始输入数据到CNC。CURSOR 光标移动键用于在CRT页面上,移动当前光标。 PAGE 页面变换键用于CRT屏幕选择不同的页面。 POS 页 面 切 位置显示键在CRT上显示机床当前的坐标位置。 PRGRM 程序键在编辑方式,编辑和显示在存中的程序。 在MDI方式,输入和显示MDI数据。
MENU OF SET 换 键 参数设置键刀具偏置数值和宏程序变量的显示的设定。 DGNOS PRGRM 自诊断的参数键设定和显示参数表及自诊表的容 * OPRALARM 报警号显示键按此键显示报警号 * AUXGRAPH 辅助图形图形显示功能,用于显示加工轨迹。 ALTER 编 辑 键 替代键用输入域的数据替代光标所在的数据。 DELET 删除键删除光标所在的数据。 INSRT 插入键将输入域之中的数据插入到当前光标之后的位置上。CAN 取消键取消输入域的数据。 EOB 回车换行键结束一行程序的输入并且换行。 *表示尚未开发的功能键 二、FANUC0系统车床标准面板 FANUC0系统车床标准面板功能说明表 按钮名称功能说明MODE(模式选择旋 钮) EDIT 编辑模式用于直接通过操作面板输入数控 程序和编辑程序。 AUTO 自动模式进入自动加工模式。 REF 回零模式机床回零;机床必须首先执行回 零操作,然后才可以运行。 MDI MDI模式单程序段执行模式。 STEP/HANDLE 单步/手轮方式手动方式,STEP是点动;HANDLE 是手轮移动。 JOG 手动方式手动方式,连续移动。 DRY RUN 空运行模式按照机床默认的参数执行程序 DNC DNC模式从计算机读取一个数控程序。
FANUC PMC的操作要点
FANUC PMC的操作 ?一:PMC的软键布局 PMC画面的进入 [SYSTEM]→[PMC] [PMCLAD]:梯形图的监控与编辑画面 ↓ 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC信号的诊断 ↓ [TITLE]:标题画面 [STA TUS]:信号状态画面 [ALARM]:PMC报警画面 [TARCE]:PMC信号追踪画面 [I/OCHK]:IO LINK诊断画面
[PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DA TA] :数据表画面 [SETING]:参数设定画面 [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) ↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]:IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]:PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码 [MONIT]:在线监控画面
FANUCPMC培训课件
培训第一节 , , 发布:数控与未来 第一节:基础知识 .顺序程序的概念 所谓的顺序程序是指对机床及相关设备进行逻辑控制的程序。 在将程序转换成某种格式(机器语言)后,即对其进行译码和运算处理,并将结果存储在和中。高速读出存储在存储器中的每条指令,通过算数运算来执行程序。如下图所示: .顺序程序和继电器电路的区别:
上图所示: 继电器回路()和()的动作相同。接通(按钮开关)后线圈和中有电流通过,接通后断开。 程序中,和继电器回路一样,通后、接通,经过一个扫描周期后关断。但在中,(按钮开关)接通后接通,但并不接通。所以通过以上图例我们可以明白顺序扫描顺序执行的原理。 .的程序结构 对于的来说,其程序结构如下: 第一级程序—第二级程序—第三级程序(视的种类不同而定)—子程序—结束 如图:
在执行扫描过程中第一级程序每执行一次,而第二级程序在向的调试中传送时,第二级程序根据程序的长短被自动分割成等分,每中扫描完第一级程序后,再依 次扫描第二级程序,所以整个的执行周期是*。因此如果第一级程序过长导致每 扫描的第二级程序过少的话,则相对于第二级所分隔的数量就多,整个扫描周期相应延长。而子程序是位于第二级程序之后,其是否执行扫描受一二级程序的控制,所以对一些控制较复杂的程序,建议用子程序来编写,以减少的扫描周期。 输入输出信号的处理:
一级程序对于信号的处理: 如上图可以看出在内部的输入和输出信号经过其内部的输入输出存储器每由第一级程序所直接读取和输出。而对于外部的输入输出经过内部的机床侧输入输出存储器每由第一级程序直接读取和输出。 二级程序对于信号的处理: 而第二级程序所读取的内部和机床侧的信号还需要经过第二级程序同步输入信号存储器锁存,在第二级程序执行过程中其内部的输入信号是不变化的。而输出信号的输出周期决定于二级程序的执行周期。 所以由上图可以看出第一级程序对于输入信号的读取和相应的输入信号存储器中信号的状态是同步的,而输出是以为周期进行输出。第二级程序对于输入信号
FANUCPMC立加FG信号大全
加工中心PMC用到的GF指令大全 G4.3---FIN---完成信号 G5.6---AFL---辅助功能锁住信号 G6.4---OVC---倍率取消信号 G7.2---ST---自动运行启动信号 G7.6---EXLM---存储行程极限1切换信号 G8.0---*IT---所有轴互锁信号 G8.4---*ESP---紧急停止信号 G8.5---*SP---自动运行停止信号 G8.6---RRW---复位信号 G8.7---ERS---外部复位信号 G10,G11---*JV 0~*JV15手动进给速度倍率信号 G12---*FV0~*FV7---进给速度倍率信号 G14.0,G14.1---ROV1,ROV2---快速移动倍率信号 G18.0,G18.1,G18.2---HS1A,HA1B,HS1C---手轮轴选信号 G19.4,G19.5---MP1,MP2---手轮增量进给信号 G19.7---RT---手动快速移动选择信号G29.4---SAR---速度到达信号 G29.6---*SSTP---主轴停止信号 G30---SOV0~SOV7---主轴速度倍率信号 G43.0,G43.1,G43.2---MD1,MD2,MD4---方式选择信号 G43.5---DNC1---DNC运行选择信号 G43.7---ZRN---手动参考点返回选择信号 G44.0---BDT1---跳段信号 G44.1---MLK---所有轴机床锁住信号 G45---BDT2~BDT9---跳段信号 G46.1---SBK---单段信号 G46.3,G46.4,G46.5,G46.6---KEY1,KEY2,KEY3,KEY4---存储器保护信号
FANUCPMC的操作
FANUC PMC 的操作 ? 一:PMC 的软键布局 PMC 画面的进入 [SYSTEM]→ [PMC] ? [PMCLAD ]:梯形图的监控与编辑画面 ↓ [ZOOM]:梯形图监控和编辑画面 ? [PMCDGN]:PMC 信号的诊断 ↓ [TITLE]: 标题画面 [STATUS]: 信号状态画面 [ALARM]: PMC 报警画面 [TARCE]: PMC 信号追踪画面 [I/OCHK]: IO LINK 诊断画面 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序
?[PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DATA] :数据表画面 [SETING]:参数设定画面 ?[STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) ?[EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) ↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]: IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]: PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 ?[SYSPRM]:系统参数画面 ?[MONIT]:在线监控画面 计数器数据类型=二进制/BCD码
FANUC_PMC的操作
FANUC PMC的操作 一:PMC的软键布局 PMC画面的进入 [SYSTEM]→[PMC] [PMCLAD]:梯形图的监控与编辑画面 ↓ 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC信号的诊断 ↓ [TITLE]:标题画面 [STATUS]:信号状态画面 [ALARM]:PMC报警画面 [TARCE]:PMC信号追踪画面 [I/OCHK]:IO LINK诊断画面
[PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DATA] :数据表画面 [SETING]: 参数设定画面 [STOP]/[RUN] [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) ↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]:IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]:PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码 [MONIT]:在线监控画面
FANUC系统部分操作面板简介
;k;lm/n 部分面板按键功能说 明(FANUC ) 、FANUC0系统MDI 面板: FANUC0系统MDI 面板各键功能说明表 键 名 称 功能说明 RESET 复位键 按下此键,复位CNC 系统,包括取消报警、主轴故障复位、中 途退出自动操作循环和输入、输出过程等。 OUTPT 输出启动键 按下此键,CNC 开始输出内存中的参数或程序到外部设备。 START 地址和数字键 按下这些键,输入字母、数字和其它字符。 -J CURSOR RESET B Ac
表示尚未开发的功能键
、FANUCO 系统车床标准面板 FANUC0系统车床标准面板功能说明表 按 钮 名称 功能说明 MODE (模式选择 旋钮) EDIT 编辑模式 用于直接通过操作面板输入数控 程序和编辑程序。 MODE ilEF/hAIUE 1 mi |AA AUTO 自动模式 进入自动加工模式。 nil s JO" ^F V\X CFVFUrj 邮户c REF 回零模式 机床回零;机床必须首先执行回 零操作,然后才可以运行。 MDI MDI 模式 单程序段执行模式。 STEP/HANDLE 单步/手轮方式 手动方式,STEP 是点动; HANDLE 是手轮移动。 JOG 手动方式 手动方式,连续移动。 DRY RUN 空运行模式 按照机床默认的参数执行程序 DNC DNC 模式 从计算机读取一个数控程序。 MODE Start Hold DRY RUN STFZHAMDLE hCI t JOG REF AUTO EDIT M01 Slop m ttff Single ?ock on off EMERGENCY STOP L SPIMDLE Start FEEDRATE OVERRIDE 10D tuou 1100 eo? 1200 70Q 130(1 bUO ? ★X. \ HM 500 * /T|| \ ' 1510 400 { ( ) \ I EDO 200 \ / ISflO HOO * * HOD t 2000
FANUC系统PMC编程
FANUC系统PMC编程重点, 2017-04-14 18:03程序设计/操作系统 FANUC系统的PMC在哪里呢?我们似乎无法看见完全的PMC。其实,FANUC PMC 是典型的与CNC集成在一起的内装式PLC,其CPU和存储器就在CNC控制单元的主板上。 因此,FANUC PMC控制系统的硬件如图1所示。 I/O单元与PMC CPU通过接口JD1A/JD51A传输信号,而机床侧输入输出元件与I/O单元则通过接口CB104、CB105、CB106、CB107传输信号。 图1、FANUC PMC硬件组成
1、外部标准输入/输出信号 FANUC机床侧标准输入/输出信号接入电路如图2所示。输出信号电路中中间继电器线圈上要并联二极管,以便当线圈断电时,为感应电流提供放电回路,否则极易损坏驱动电路。这个二极管称为续流二极管。 图2 FANUC外部标准输入/输出信号
2、PMC地址及信号种类 (1)地址表示 每个PMC输入/输出接口(interface)信号用地址(address)来区别。所谓地址是指与机床侧的输入/输出信号、与CNC之间的输入/输出信号、内部继电器、计数器、保持型继电器、数据表等各信号的存在场所的号码。 PMC地址由字节组成,即一个地址可以表示8个信号。地址由地址号和位号组成,地址号的前面必须要有一个字母,它表示信号的种类。如图3所示。 图3、PMC地址表示 某一个信号可以采用助记符(symbol)来方便记忆,如X9.3这个地址表示第4轴回参考点时的减速信号,*DEC4(通常是英文简写)就是其助记符;G8.4是紧停信号,*ESP就是其助记符。 (2)地址种类 FANUC PMC地址种类(address type)主要有X、Y、G、F等,如图4所示。CNC 与PMC之间的G、F 信号及地址是由FANUC公司确定的,PMC编程者只可使用不能改变。而CNC与MT之间的X、Y信号及地址是由PMC 编程者自行定义。
FANUCPMC的操作
系统维修实习教材 FANUC PMC 的操作 一: PMC 的软键布局 PMC 画面的进入 [SYSTEM] T [PMC] [PMCLAD ]:梯形图的监控与编辑画面 J PHC PROGRAM LIST UIEUER PMC RUH PROGlRAlKJUSr FOR BEMO 5 PROGRAK GOUMI = 5 L/S P ROG ND, SYMBOL COMMENT SIZEtBYTE 〉 HET COUNT P COLLECT COLLECTlUE MONITOR R L LEVELl LADDER PROGRAM tLEUELl 〕 16 2 / 1 L LEVEL2 LADDER PROGRAM [PMCPRM] : PMC 参数 J [TIMER]: 定时器画面 [COUNTR]:计数器画面 [KEEPRL]: 保持型k 地址画面 [DATA]: [SETING ]: 参数设定画面 [STOP]/[RUN] : PMC 亭止 / 启动 (正常运行时请不要进行此项操作) [EDIT] : PMC 编辑画面(进入编辑画面时需停止 PMC ) 标题的编辑 信号注释的编辑 外部信息的编辑 10模块的设定 交叉点的设定 PMC 的删除 CLRTT L |CLRLA D |CLRSYM I CLRMSG | CLRALL I CLRMDL I CDNDNS CLRPRM I I 删除标题 删除梯形图 删除系统参数 删除外部信息 删除全部 删除10模块设定 压缩PMC 区域 删除PMC 参数 [MONIT]:在线监控画面 COUNT IRlKEEPRLi DATA I SET ING 数据表画面 [TITLE]: [SYMBOL]: [MESAGE]: [MODULE]: [CROSS]: [CLEAR]: [CLRTTL]: [CLRLAD]: [CLRSYM]: [CLRMSG]: [CLRALL]: [CLRMDL]: [CONDNS]: [CLRPRM]: [SYS PRM] :系统参数画面 COUNTER DATA TYPE = LADDER EXEC ri50- Cl-150} TIMER FANUC PMC 的操作 一:PMC 的软键布局 PMC 画面的进入 [SYSTEM]→ [PMC] [PMCLAD ]:梯形图的监控与编辑画面 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC 信号的诊断 [TITLE]: 标题画面 [STA TUS]: 信号状态画面 [ALARM]: PMC 报警画面 [TARCE]: PMC 信号追踪画面 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序 [I/OCHK]:IO LINK诊断画面 [PMCPRM]:PMC参数 [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DA TA] :数据表画面 [SETING]:参数设定画面 [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]:IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]:PMC的删除 [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码 [MONIT]:在线监控画面 可以通过RS-232C以及HIGH SPEED I/F(快速以太网口)和F-LADDER III软件进行在线监控和编辑,在线的同时在系统画面上对梯形图的监控变成无效。 二:对PMC画面进行相关的参数设定 以上所显示的PMC的全部画面可能因为参数的设定原因而显示不全,在维修过程中可能需要我们对相关参数进行设定,以保证可以对PMC进行相关的维修操作。 操作: [PMC]→[PMCPRM]→[SETING] FANUC PMC的操作 一:PMC的软键布局 PMC画面的进入 [SYSTEM]→[PMC] [PMCLAD]:梯形图的监控与编辑画面 ↓ 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC信号的诊断 ↓ [TITLE]:标题画面 [STATUS]:信号状态画面 [ALARM]:PMC报警画面 [TARCE]:PMC信号追踪画面 [I/OCHK]:IO LINK诊断画面 [PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DA TA] :数据表画面 [SETING]:参数设定画面 [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) ↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]:IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]:PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码[MONIT]:在线监控画面FANUC_PMC的操作---参数
FANUCPMC的操作.