塔式起重机动态结构分析和研究
塔式起重机动态结构分析和研究
发表时间:2018-03-23T11:31:21.503Z 来源:《基层建设》2017年第34期作者:朱政委谭静
[导读] 摘要:塔式起重机作为一种间歇式工作机械,研究其动态特性方法,可以更好的对其进行动态设计,提高塔机的耐用程度,改善其工作性能。
中国建筑第七工程局有限公司 450004
摘要:塔式起重机作为一种间歇式工作机械,研究其动态特性方法,可以更好的对其进行动态设计,提高塔机的耐用程度,改善其工作性能。文章阐述了动载系数法、有限元法、模态分析法、动态子结构的模态综合法、建立少自由度模型法和子空间迭代法6种塔机动态特性分析的主要方法,概述了其国内外应用研究进展,分析了各种研究方法的优势及存在的问题,展望了塔式起重机动态特性的研究方向。
关键词:动态特性;模态分析法;动态子结构的模态分析法;有限元法;动载系数法
塔式起重机(以下简称塔机)是一种经常启动、制动和具有复杂的耦合运动的机械。在启动、制动和进行耦合运动时,机构和结构将承受强烈的冲击振动。准确描述和精确计算塔机结构体系在外激励下的动态过程,从而为塔机的设计、生产提供理论上和实践上的指导,对于塔机的经济性和安全性都具有非常重要的意义。然而,长期以来,在塔机设计中,一般仅用动载系数来考虑这种动态效应。实践证明,应用动载系数虽然简单,但在某些较复杂的情况下,用它计算的构件应力与实际应力相差较大。为了精确计算塔式起重机的动载荷,近年来很多研究人员在这方面做了许多工作,本文在总结这些研究成果的同时,指出存在的问题与不足,并探讨进一步的研究方向。
1.塔机动态特性的研究方法
1.1动载系数法
在塔机结构设计时常采用动载荷系数法来计算塔机结构在工作时所受到的动载荷,即用动载荷系数与静载荷的乘积作为等效动载荷。可见动载系数法是建立在静力计算的基础上研究动载荷的方法,因而其实质上仍是静态设计方法。
1.2有限元法
有限单元方法是在变分原理的基础上发展起来的一种数值近似解法,也是借助计算机技术迅速发展起来的求解大型结构的有效方法。其研究思想是将研究对象原本连续的求解区域离散为一组数量有限且按一定方式相互联结在一起的单元。由于单元能按照不同的联结方式组合,且单元本身又有不同形状,因而可以模拟成不同几何形状的求解小区域;然后借助于力的平衡条件,通过比较简单的数学函数来呈现单元两端节点与单元位移参数之间的关系,解出函数便可得到各个单元及节点的位移及应力,同时也可以对单元的弹性和惯性等进行分析,进而逼近整体的求解问题。这种先化整为零,进而集零为整的过程就是有限单元法的基本思路。
1.3动态子结构的模态分析法
动态子结构法是按工程观点或结构的几何轮廓,并遵循某些原则要求,把完整结构人为地划分为若干部件。在此基础上先对自由度少得多的个别子结构进行动态特性分析,后经由各种方案(如固定界面法),将从这些子结构中得到的重要模态信息(主要是低阶的模态信息)保存下来,以综合成里兹基,最后求出完整结构的主要模态特性。动态子结构的模态分析法通过计算小尺寸特征值问题来替代直接解大型特征值问题,并能保证完整系统主要模态的精度。
2.塔机动态特性研究现状
(1)从研究对象来讲,对动臂变幅塔机研究较多,而对小车变幅塔机研究较少。动臂变幅塔机与小车变幅塔机两者的结构型式不同,操作规程不同,计算工况不同,动载荷表现自然也不同,不能用动臂变幅塔机的研究结果来描述小车变幅塔机的动载特点;(2)从研究方法来讲,有三方面不足:第一,在建立模型、确定计算工况和施加激振载荷方面,多简化在二维平面进行,没有按实际情况建立三维计算模型,没有考虑变幅和回转动载荷的影响;第二,多应用单一方法进行动态分析,正如前面所分析的,每种方法都存在一定的缺陷,若多种方法结合使用,则能相互弥补不足,提高计算的可靠性;第三,多应用传统方法进行分析,柔性多体系统动力学等前沿学科应用较少;(3)从研究过程来讲,多为单向研究,缺少从认识到实践的反复过程。某些研究虽取材于工程实际,但没有返回去为工程实际服务,失去了研究的真正价值。
3.起升工况的动态响应分析
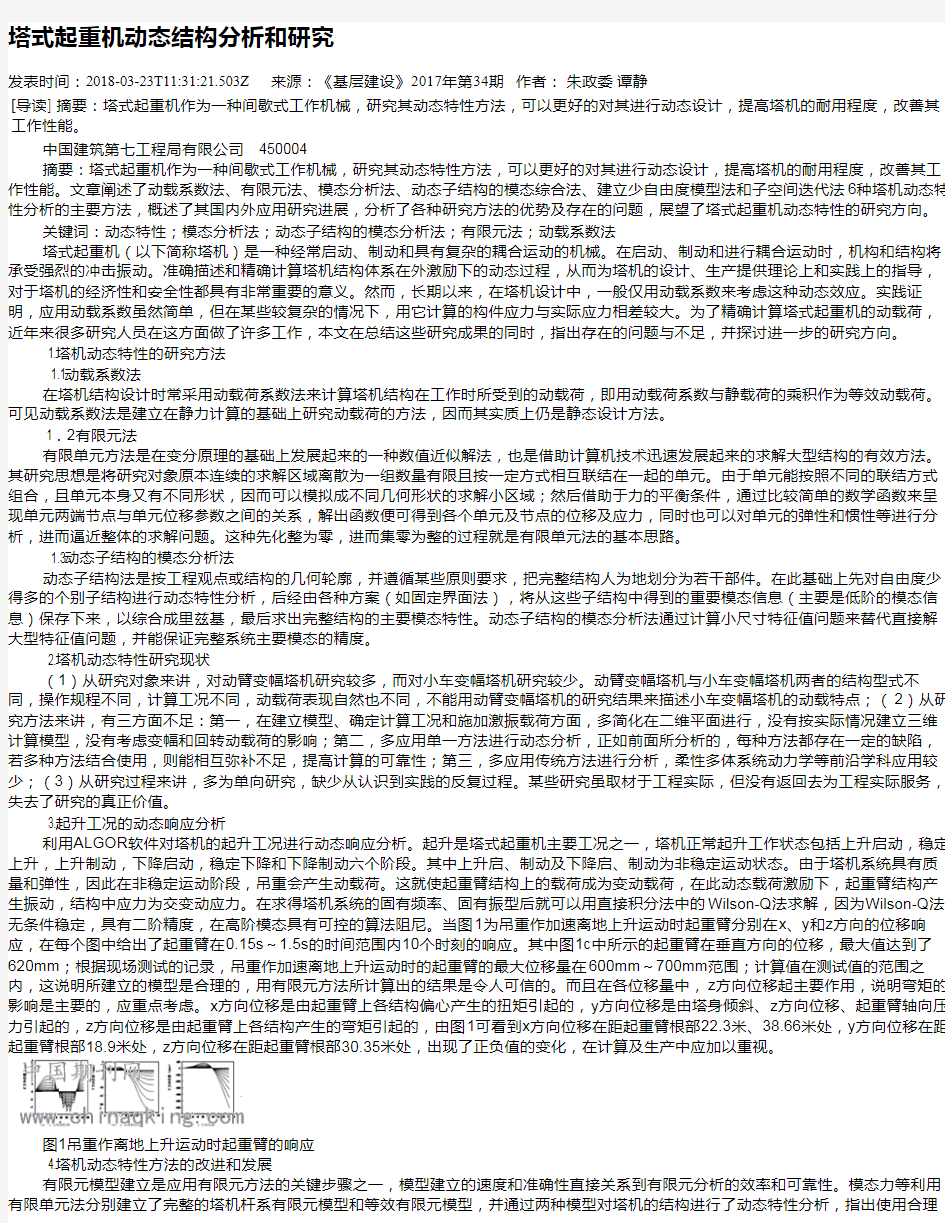
利用ALGOR软件对塔机的起升工况进行动态响应分析。起升是塔式起重机主要工况之一,塔机正常起升工作状态包括上升启动,稳定上升,上升制动,下降启动,稳定下降和下降制动六个阶段。其中上升启、制动及下降启、制动为非稳定运动状态。由于塔机系统具有质量和弹性,因此在非稳定运动阶段,吊重会产生动载荷。这就使起重臂结构上的载荷成为变动载荷,在此动态载荷激励下,起重臂结构产生振动,结构中应力为交变动应力。在求得塔机系统的固有频率、固有振型后就可以用直接积分法中的Wilson-Q法求解,因为Wilson-Q法无条件稳定,具有二阶精度,在高阶模态具有可控的算法阻尼。当图1为吊重作加速离地上升运动时起重臂分别在x、y和z方向的位移响应,在每个图中给出了起重臂在0.15s~1.5s的时间范围内10个时刻的响应。其中图1c中所示的起重臂在垂直方向的位移,最大值达到了620mm;根据现场测试的记录,吊重作加速离地上升运动时的起重臂的最大位移量在600mm~700mm范围;计算值在测试值的范围之内,这说明所建立的模型是合理的,用有限元方法所计算出的结果是令人可信的。而且在各位移量中,z方向位移起主要作用,说明弯矩的影响是主要的,应重点考虑。x方向位移是由起重臂上各结构偏心产生的扭矩引起的,y方向位移是由塔身倾斜、z方向位移、起重臂轴向压力引起的,z方向位移是由起重臂上各结构产生的弯矩引起的,由图1可看到x方向位移在距起重臂根部22.3米、38.66米处,y方向位移在距起重臂根部18.9米处,z方向位移在距起重臂根部30.35米处,出现了正负值的变化,在计算及生产中应加以重视。
图1吊重作离地上升运动时起重臂的响应
4.塔机动态特性方法的改进和发展
有限元模型建立是应用有限元方法的关键步骤之一,模型建立的速度和准确性直接关系到有限元分析的效率和可靠性。模态力等利用有限单元法分别建立了完整的塔机杆系有限元模型和等效有限元模型,并通过两种模型对塔机的结构进行了动态特性分析,指出使用合理