现代控制理论习题解答(第三章)

第三章 线性控制系统的能控性和能观性
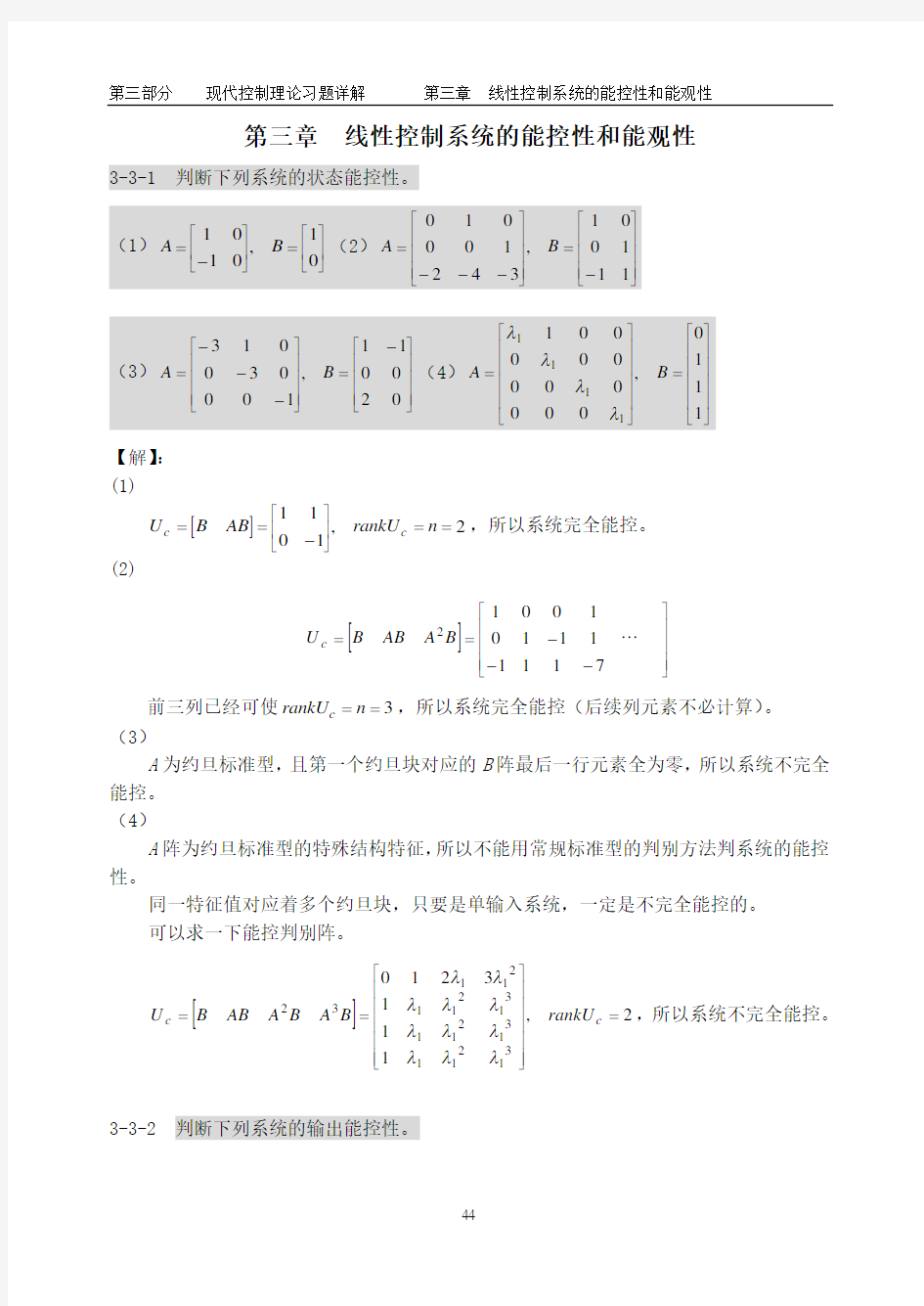
3-3-1 判断下列系统的状态能控性。
(1)??????=??
?
???-=01,0101B A (2)????
?
?????-=??????????---=111001,342100010B A (3)????
??????-=??????????---=020011,100030013B A (4)?????
???????=?????
?
???
???=1110,0
000
00
001
11
1
1
B A λλλλ
【解】: (1)
[]2,1011==??
????-==n rankU AB B
U c c ,所以系统完全能控。 (2)
[
]
????
?
?????---==7
111111010
012
B A AB
B
U c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。 (3)
A 为约旦标准型,且第一个约旦块对应的
B 阵最后一行元素全为零,所以系统不完全能控。 (4)
A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。 可以求一下能控判别阵。
[
]
2,1113210312
11
31211312
11211
3
2
=???
?
??
?
????
?
??==c c rankU B A B
A A
B B
U λλλλλλ
λλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ???
?
???????????-=??????????-+??????????---=x
y u x x 011101020011100030013 (2) []??
?
??
??=??????????+??????????---=x y u x x 0011006116100010
【解】: (1)
已知??
??
?
?????-=????
??????---=020011,10003001
3B A ,??????-=011101C ,??????=0000D []
??
?
?
??--=
111300002B CA CAB CB D
前两列已经使[]
22==m B CA CAB CB D rank ,所以系统输出能控。
(2)
系统为能控标准型,所以状态完全能控。又因输出矩阵C 满秩,且输出维数m 小于状态维数n ,所以状态能控则输出必然能控。
2-3-3 判断下列系统的能观性。
(1) ???
????????????-=??????????---=x
y x x 121110342100010 ;(2) []?????=??
????=x y x x 110111 ; (3) []??
?
??
??=???????
???-=x y x x 11030002001
2 ;(4)[]??
???
??=??????????--=x y x x 411100040004 【解】:
(1)
已知??????-=??
??
??????---=121110,342100010
C A
????
??
???
?
???
????
???-=??????????= 442121
11020CA CA C V 前三行已使30==n rankV ,
所以系统完全能观(后续元素不必计算)。
(2)
[]11,01
11=???
?
??=C A 2,12
1100==??
?
?
??=??????=n rankV CA C V 所以系统完全能观。
(3)
状态空间表达式为约旦标准型,且C 阵对应于第一个约旦块的第一列元素为零,所以系统状态不完全能观。 (4)
状态空间表达式为约旦标准型的特殊结构形式,所以不能用常规方法判系统的能观性。同一特征值对应着多个约旦块,只要是单输出系统,一定是不完全能观的。
也可求
2,0,
41616444411
0020==????
??????--=??????????=rankV V CA CA C V
所以系统不完全能观。
3-3-4 设系统状态方程为Bu Ax x
+= ,若1x 、2x 是系统的能控状态,试证状态21x x βα+也是能控的(其中α、β为任意常数)。
【解】: 设:
[]x Cx y βα
==
因为,状态1x 和2x 能控,所以至少有
[
]
21=-B A AB B
rank n 。
而由系统输出能控的判别阵得:
[][
]
1)(12==-B A AB B
C rank B CA CAB CB rank n ,(C 阵又满秩)。
所以[]x Cx y βα==一定是能控的。
3-3-5 设系统∑1和∑2的状态空间表达式为
[]??
?=+-=?????=??????+??????--=∑
∑
22
2222
11
11112:12104310:x y u x x
x
y u x x (1)试分析系统∑1和∑2的能控性和能观性,并写出传递函数;
(2)试分析由∑1和∑2组成的串联系统的能控性和能观性,并写出传递函数; (3)试分析由∑1和∑2组成的并联系统的能控性和能观性,并写出传递函数。 【解】: (1)
2,2312
;2,4110:1=??
????--==??????-=∑
o o c c rankV V rankU U
??
?=+-=∑
22
2222
2:x y u x x
两个子系统既能控又能观。
(2)以系统1在前系统2在后构成串联系统为例(串联顺序变化状态空间表达式不同,又都是SISO 系统,传递函数相同): 系统有下关系成立:
u u =1,12y u =,2y y =
??
????=21x x x [][]x
x C y u x u b x A C b A x
1000010212043010
002121
21==????
??????+??????????---=??
?
???+??????= [
]
;2,41013414102=??
??
?
?????---==c c rankU b A Ab b
U
3,4472121002=?
????
????
?---=??????????=o o rankV CA CA C V
串联后的系统不能控但能观。
传递函数为:
1111212212)()()()()(b A sI C b A sI C s G s G s G ----==
[])
34(1
)2)(34(21043112]1)2(1[22
1
1++=++++=???????
?
?
???+-??+?=--s s s s s s s s s (3)并联后的系统数学模型为: 系统有下关系成立:
u u u ==21,21y y y +=
并联后的状态空间表达式为:
[][]x
x C C y u x u b b x A A x
112110200043010
0021
2121==????
??????+??????????---=??
????+??????= [
]
;3,42113414102
=??
??
?
?????---==c c rankU b A Ab b
U 3,4562231122=?????
???
?
?---=??????????=o o rankV CA CA C V
并联后系统既能控又能观。
传递函数为:
2122111121)()()()()(b A sI C b A sI C s G s G s G ---+-=+=
[]611678221)34(2]1)2(1[104311223221
1
+++++=+++++=?+?+??
?????
?
?
???+-=--s s s s s s s s s s s s
【解】:
系统的传递函数可以写成:
)
6)(1)(3(18
2710)(23++++=
++++=
s s s a
s s s s a
s s G
(1)
当=a 1,3,6时,系统传递函数出现零极点对消现象,则系统可能不能控,或不能观或即不能控又不能观。 (2)
在上述a 的取值下,求使系统为能控的状态空间表达式; 能控标准型为:
[]??
?
????=??????????+??????????---=x a y u x x 01100102718100010 (3)
在上述a 的取值下,求使系统为能观的状态空间表达式。 能观标准型为:
[]??
?
??
??=????
?
?????+??????????---=x y u a x x 1000110102701180
3-3-7 已知系统的状态空间表达式为
[]??
?
??
??=??????????+??????????=x c b a y u c b a x x λλλ000001
试问能否选择常数a 、b 、c 使系统具有能控性和能观性。 【解】:
????
?
?????++=2222λλλλλλλc c c b b b b a b a a U c
在上述行列式中,无论a 、b 、c 如何取值,都有两行元素线性相关,则0=c U ,
2=c rankU 。
????
?
?????++=22
202λλλλ
λλλ
c b a a c b a a c b a V
在上述行列式中,无论a 、b 、c 如何取值,都有两列元素线性相关,则00=V ,20=rankV 。
所以,无论常数a 、b 、c 取何值,系统都不能控和不能观。
3-3-8 系统的结构如题3-3-8图所示,图中a 、b 、c 、d 均为实常数,试建立系统的状态空间表达式,并分别确定当系统状态能控和能观时a 、b 、c 、d 应满足的条件。
题3-3-8图
【解】:
系统状态空间表达式为:
[]??
???=??
?
???+??????---=??????=+--=++-=x
y u x b d c a x x y u bx dx x u cx ax x 01111212211
系统能控的条件为:
[]011≠-+--=?
?
????--+-==c a b d U b d c a Ab b
U c c 。
系统能观的条件为:
0,010≠=??
????-=??????=c V c a cA c V o 。
3-3-9 设系统
∑),(C A 的系数矩阵为
[]
00,01
001
1321
c C a a a A =????
?
?????---=
其中1321,,,c a a a 为实数。试问系统∑),(C A 能观的充要条件是什么?要求用A 、C 中的参
数具体表示。 【解】:
.
0,00001
00
3123310313
212
21321
311311
3121121
2113121
11
20≠≠?≠-=????
?
?????-----=????????
??-----=??????????=a c a c V a a a a a a a a a a c c a a c a c a a c
a c a c a c a c a c CA CA C V
3-3-10 已知系统的状态空间表达式为
[]??
???=??????+??????--=x
c c y u b b x x 21213210
欲使系统中有一个状态既能控又能观,另一个状态既不能控又不能观,试确定参数2121,,,c c b b 应满足的关系。 【解】:
2,1,023)(212-=-==++=-=λλλλλλA I f
A 为友矩阵,且特征值互异,所以
[]??
?
???--=??
?
?
??--=????
??==-1112,211111
121
21
P P P P λλ x P x =
[]?
????
--=??????--++??????--=x
c c c c y u b b b b x x 21212121222001 显然,当状态2x 既能控又能观,而状态1x 既不能控又不能观的条件是:
??
?≠--=+≠-=-0,0202,012212121b b b b c c c c ???≠-=≠=?020
12
21b b c c 当状态1x 既能控又能观,而状态2x 既不能控又不能观的条件是:
???≠+=--≠-=-02,00,022*******b b b b c c c c ??
?≠-=≠=?00
212
21b b c c
3-3-11 设n 阶系统的状态空间表达式为??
?=+=Cx
y bu Ax x
,试证:
(1)若Cb=0,CAb=0,CA 2
b=0,……CA n-1
b=0,则系统不能同时满足能控性和能观性条件。
(2)如果满足Cb=0,CAb=0,CA 2b=0,……CA n-2b=0,CA n-1
b ≠0则系统总是又能控又能观的。 【解】:
(1)以三阶系统为例:
[
]
?
????????
?=??????????=????
?
??????=?b CA b CA b CA b CA b CA b CA b CA b CA CAb b CA CAb Cb b A Ab b
CA CA C U V c 433432322220000000 0,000=?=?c c U V U V
所以该系统不能同时满足能控性和能观性条件。
(2)以三阶系统为例:
[
]
?
??????
??
?=??????????=????
?
??????=?b CA b CA k b CA k k b CA b CA b CA b CA b CA CAb b CA CAb Cb b A Ab b
CA CA C U V c 433432322220000 ,0,00)(03230≠≠?≠==?c c U V b CA k U V
所以该系统既能控又能观。
3-3-12 已知系统的微分方程为u y y y y 66116=+++ ,试写出对偶系统的状态空间表达式及其传递函数。
【解】:
因为)(])([)()(11s G b A sI C C A sI b s G T T T T T 原系统对偶=-=-=--
又因为单输入/单输出系统传递函数矩阵为一个元素,所以二者传递函数是相同的。
6
1166
)(23+++=
s s s s G
系统传递函数无零点,所以不会出现零极点对消现象,系统既能控又能观。
能控标准型为:
[]??
?
??
??=?????
?????+??????????---=x
y u x x 006100611610001
能观标准型为:
[]??
?
??
??=?????
?????+??????????---=x y u x x 100006610110160
3-3-13 已知系统的状态方程为u x x
??
?
???+??????--=112101 ,试求出它的能控标准型。 【解】:
[]21,1111=<=??
?
???--==n rankU Ab b
U c c 。 所以系统不能控,不存在能控标准型。
3-3-14 已知系统的状态空间表达式为 []??
???-=???
???-=x y x x
114201 试求出它的能观标准型。
【解】:
判系统的能观性:
2,431100=??
????--=??????=rankV CA C V
所以系统能观。 方法之一: ①求变换阵
[][]?
?
?
???--=??????==?
?
?
???=??????==--1112,21111110,1011
0101110T AT T T V T AT T T
②设x T x 0=对原状态空间表达式做线性变换得:
[]??
???=??????-=x y x x 105140 方法之二:
依据特征多项式45)(2+-=-=s s A sI s f 直接可以写出能观标准型的A ,C 阵。
??
????-=5140A ,[]10=C 。
【解】:
系统的传递函数可以写成:
13
4523
486)(222++++=
++++=
s s s s s s s s G
传递函数无零极点对消,系统既能控又能观。 能控标准型为:
[]??
???+=??????+??????--=u x y u x x 25104310 能观标准型为:
[]??
???+=??????+??????--=u x y u x x 10254130
3-3-16 已知完全能控系统的状态方程为u x x
??
?
???+?
?????-=100110 ,试问与它相应的离散化方程)(sin cos 1)(cos sin sin cos )1(k u T T k x T T T T
k x ???
???-+??????-=+是否一定能控。 【解】:
已知)(sin cos 1)(cos sin sin cos )1(k u T T k x T T
T T
k x ??
?
???-+????
??-=+, 离散系统完全能控的条件为c M 矩阵满秩。
而[]?
???
??
??+--+--==T T T T T T
T T T GH H
M c sin cos )cos 1(sin sin sin )cos 1(cos cos 12,所以系统是否能控,取决
于采样周期T 的取值使能控判别阵满秩。
[]???
?
??
??+-+--==T T T T
T T T T GH H
M c sin cos 2sin sin sin )cos 1(cos cos 12
)1(cos sin 2-=T T M c
当),2,1(n k k T =≠π时,2)(=c M rank 离散化方程也是能控的。
3-3-17 试将下列系统分别按能控性、能观性进行结构分解。
(1)[]111,100,340010121-=??
???
?????=??????????--=C b A (2)[]111,100,041020122-=????
?
?????=??????????----=C b A
【解】:
(1)
①按能控性进行结构分解
[
]
2,9310004102=????
?
?????--==c c rankU b A Ab b
U
所以系统不完全能控,需按能控性进行结构分解,构造非奇异变换阵c T 。
??????????-=031100010c T ,????
??????-=-010*******
c T
按能控性进行结构分解后的系统状态空间表达式为:
[]?
?
?
???-=??????????+????????????????--=??????c c c c
c c x x y u x x x x 121001100241230
②按能观性进行结构分解
2,591231111020=????
?
?????---=??????????=rankV CA CA C V
所以系统不完全能观,需按能观性进行结构分解,构造非奇异变换阵10-P 。
????
??????--=-0012311111
0P ,??????????----=21311210
00P
按能观性进行结构分解后的系统状态空间表达式为:
[]?
?
?
???=??????????+???????????????
?--=??????0000000102111
1043010
x x y u x x x x
(2)
①按能控性进行结构分解
[
]
2,1010002102=????
?
?????--==c c rankU b A Ab b
U
所以系统不完全能控,需按能控性进行结构分解,构造非奇异变换阵c T 。
????
??????-=??????????-=-010001100,0011000101
c c T T
按能控性进行结构分解后的系统状态空间表达式为:
[]?
?
?
???--=??????????+????????????????-----=??????c c c c
c c x x y u x x x x 111001*********
②按能观性进行结构分解
2,121101111020=????
?
?????---=??????????=rankV CA CA C V
所以系统不完全能观,需按能观性进行结构分解,构造非奇异变换阵10-P 。
????
?
?????----=??????????---=-110011100,00110111101
0P P
按能观性进行结构分解后的系统状态空间表达式为:
[]?
?
?
???=?
?????????-+????????????????-----=??????00000001011112032010x x y u x x x x
3-3-18 试将下列系统分别按能控性和能观性进行结构分解。
(1)[]0103,2100,42
14020100
32000
1=?????
?
??????=??
?????
??
???----=C b A ; (2)[]211,221,102322001=??
??
?
?????=??????????-=C b A 。 【解】:
(1)
系统的特征方程为:
0)1)(2)(3)(4()(=-++-=-=λλλλλλA I f
化为对角标准型,其变换阵为:
?????
?
?
??
???----=????????
?????
????
?-=-0001
010333.00015.01333.01429.0127.1,18173
17
1
1311002101010001
P P 化成对角标准型为:
[]x
y u x x 333.3100010667.110000200003000
04=??????
??????+???????
??
???--= 可以看出系统不能控也不能观,需按能控性和能观性进行结构分解。
其中3x 为能控能观的状态变量co x ;1x 为能控不能观的状态变量o c x ;4x 为不能控能观的状态变量o c x ;2x 为不能控不能观的状态变量o c x
将上述方程按co x ,o c x ,o c x ,o c x 的顺序排列,则有:
[]x
y u
x x x x x x
x x 0333.30100667.113000
010*******
022*******
=?
????
?
??????+????????????????????????--=??????????????
或写成
[]x y u
x x x x x x x x o c c c co o c c c co 0333
.30100667.1130000100004000
020000=?
???????????+????????????????????????--=????????????
(2)
[
]
3,2022612211
12=??
??
??????-==c c rankU b A Ab b
U 3,1147521211020=????
??????--=??????????=rankV CA CA C V 系统既能控又能观,无需分解。
3-3-19 已知系统的微分方程为u u u y y y 8634++=++ ,试分别求出满足下列要求的状态空间表达式:
(1)系统为能控能观的对角标准型; (2)系统为能控不能观的; (3)系统为能观不能控;
(4)系统为不能控也不能观的。 【解】:
13
5
.015.113
4523
486)(222++++=
++++=
++++=
s s s s s s s s s s G 。 传递函数无零极点对消,则原系统既能控又能观。
)()(3
5
.0)(15.1)(s U s U s s U s s Y ++++=
设:
u x x x x
u x x
u x x
s U s s X s U s s X ??????+???????????
?--=???????
??
?+-=+-=????
???
?
+=+=1130013)(31)()(1
1)(2121221121 []u x x u x x y +??
?
???=++=21215.05.15.05.1
人为增加一对偶极子,得:
134521)34()52()(2
3
22
++++=
++++=
s
s s s s s
s s s s s G
系统能控不能观的状态空间表达式为:
[]??
?
????+=??????????+??????????--=u x y u x x 250100430100010 系统能观不能控的状态空间表达式为:
[]??
?
??
??+=?????
?????+??????????--=u
x y u x x 10025041030100
系统既不能控又不能观的状态空间表达式为:
[]??
?
??
??+=?????
?????+??????????--=u
x y u x x 05.05.101100003000
1
其中????
?
?????-=110100101T ,对系统进行结构分解。试回答以下问题:
(1)不能控但能观的状态变量以1x ,2x ,3x 的线性组合表示;
(2)能控且能观的状态变量以1x ,2x ,3x 的线性组合表示; (3)试求这个系统的传递函数。 【解】:
111
,,,
010110011---===????
?
?????-=CT C TB B TAT A T
线性变换后系统的状态空间表达式为:
[]x
y u x x x x
x x 101022220032021321321=??????????-+????????????????????---=?????????? 系统的特征方程为:
0)2()1()(2=--=-=λλλλA I f
将线性变换后的系统变成约当标准型,变换阵为:
??????????-=2210105.010P ,????
?
?????--=-022*******
P
约当标准型为:
[]5.211~,024~,100110002~11==????
?
?????-==??????????==--P C C B P B P A P A
A ~
为约当标准型,可以看出系统完全能观,状态3~
x 不能控。 因为:
Tx x =,x P x = Tx P x 1~-=
x x ??
??
?
?????--=002100314~ 所以不能控但能观的状态变量321334~x x x x ++-=
能控且能观的状态变量??????-=????
???????????
?-=????????1332121
2002100~~x x x x x
x x 线性变换不改变系统的传递函数,用约当标准型的能控能观的部分即最小实现求传递函数:
[]x
y u x x ~1124~1002~=??????-+??????=
[]??
?
???-??
??
??--?=-=--24100211~)~
(~)(1
1s s b A sI C s G co co co )
2)(1(2---=
s s s
(1)求系统的能控标准型实现,画出系统的状态图;
(2)求系统的能观标准型实现,画出系统的状态图;
(3)用传递函数并联分解法,求系统对角标准型的实现,画出系统状态图。 【解】:
.3,2,1===n m r
)(34)
2)(1(3)()()()(21s U s s s s s s U s G s Y s Y ??
???
???????+++++==?????? )(10)(29361161161
223s U s U s s s s s ??
?
???+???????????? ??+???? ??+???? ??+++=
能控标准型为:
u x x ????
?
?????+??????????---=1006116100010 u x y y ??????+??????=??????1013216921 系统状态图如题3-3-21图1所示。
u
题3-3-21图1
能观标准型为:
u x u B B B x I a I I a I I a x m m
m m m ??
??
???
???
??????????+??????
??????????????------=????
?
?????+??????????---=113629601
000
0601001100010011000160000006
0000
000021022
12022
u x y y ???
???+?????
?=??????1010000001000021 系统状态图如图题3-3-21图2所示。
题3-3-21图2
对角标准型为:
)(10)(312112
)(34)2)(1(3)()(21s U s U s s s s U s s s s s s Y s Y ???
???+??????????++-+=?????
???????+++++=?????? )(21
)(12)(1s U s s U s s Y +-+=
)()(31
)(2s U s U s s Y ++=
设:
)(3
1
)(),(2
1
)(),(1
1
)(321s U s s X s U s s X s U s s X +=
+=
+=
u x x x x x x ????
??????+????????????????????---=??????????111300020001321321 )()(2)(2
1
)(12)(211s X s X s U s s U s s Y -=+-+=
)()()()(3
1
)(32s U s X s U s U s s Y +=++=
第三章习题解答
第三章 纯流体的热力学性质计算 思考题 3-1气体热容,热力学能和焓与哪些因素有关?由热力学能和温度两个状态参数能否确定气体的状态? 答:气体热容,热力学能和焓与温度压力有关,由热力学能和温度两个状态参数能够确定气体的状态。 3-2 理想气体的内能的基准点是以压力还是温度或是两者同时为基准规定的? 答:理想气体的内能的基准点是以温度为基准规定的。 3-3 理想气体热容差R p v c c -=是否也适用于理想气体混合物? 答:理想气体热容差R p v c c -=不适用于理想气体混合物,因为混合物的组成对此有关。 3-4 热力学基本关系式d d d H T S V p =+是否只适用于可逆过程? 答:否。热力学基本关系式d d d H T S V p =+不受过程是否可逆的限制 3-5 有人说:“由于剩余函数是两个等温状态的性质之差,故不能用剩余函数来计算性质 随着温度的变化”,这种说法是否正确? 答:不正确。剩余函数是针对于状态点而言的;性质变化是指一个过程的变化,对应有两个状态。 3-6 水蒸气定温过程中,热力学内能和焓的变化是否为零? 答:不是。只有理想气体在定温过程中的热力学内能和焓的变化为零。 3-7 用不同来源的某纯物质的蒸气表或图查得的焓值或熵值有时相差很多,为什么?能否 交叉使用这些图表求解蒸气的热力过程? 答:因为做表或图时选择的基准可能不一样,所以用不同来源的某纯物质的蒸气表或图查得的焓值或熵值有时相差很多。不能够交叉使用这些图表求解蒸气的热力过程。 3-8 氨蒸气在进入绝热透平机前,压力为 2.0 MPa ,温度为150℃,今要求绝热透平膨胀机出口液氨不得大于5%,某人提出只要控制出口压力就可以了。你认为这意见对吗?为什么?请画出T -S 图示意说明。 答:可以。因为出口状态是湿蒸汽,确定了出口的压力或温度,其状态点也就确定了。
现代控制理论习题解答..
《现代控制理论》第1章习题解答 1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为: x Ax Bu y Cx Du =+=+ 线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,而对线性时变系统,其系数矩阵A ,B ,C 和 D 中有时变的元素。线性定常系统在物理上代表结构和参数都不随时间变化的一类系统, 而线性时变系统的参数则随时间的变化而变化。 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下: 1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点? 答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。对于n 阶传递函数 121210 1110 ()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++, 分别有 ⑴ 能控标准型: []012 101 210100000100000101n n n x x u a a a a y b b b b x du ---????? ???????????? ???=+?? ???????? ? ?????----???? ? =+??
⑵ 能观标准型: []0011221100010 00 100010 1n n n b a b a x a x u b a b y x du ---?-?? ????? ??-????? ?????=-+???? ? ????? ??????-???? ?=+?? ⑶ 对角线标准型: []1212 001001001n n p p x x u p y c c c x du ????? ??????? ???=+?????? ????? ??????=+? 式中的12,, ,n p p p 和12,,,n c c c 可由下式给出, 12121012 1 11012 ()n n n n n n n n n b s b s b s b c c c G s d d s a s a s a s p s p s p ------++++=+=+++ +++++--- 能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。 能观标准型的特点:能控标准型的对偶形式。 对角线标准型的特点:状态矩阵是对角型矩阵。 1.4 对于同一个系统,状态变量的选择是否惟一? 答:对于同一个系统,状态变量的选择不是惟一的,状态变量的不同选择导致不同的状态空间模型。 1.5 单输入单输出系统的传递函数在什么情况下,其状态空间实现中的直接转移项D 不等 于零,其参数如何确定? 答: 当传递函数)(s G 的分母与分子的阶次相同时,其状态空间实现中的直接转移项D 不等于零。 转移项D 的确定:化简下述分母与分子阶次相同的传递函数 1110 111)(a s a s a s b s b s b s b s G n n n n n n n ++++++++=---- 可得: d a s a s a s c s c s c s G n n n n n ++++++++=----0 11 10 111)( 由此得到的d 就是状态空间实现中的直接转移项D 。 1.6 在例1. 2.2处理一般传递函数的状态空间实现过程中,采用了如图1.12的串联分解,试 问:若将图1.12中的两个环节前后调换,则对结果有何影响?
第3章习题及部分解答
3.5设有一个SPJ数据库,包括S,P,J,SPJ四个关系模式: S(SNO,SNAME,STATUS,CITY); P(PNO,PNAME,COLOR,WEIGHT); J(JNO,JNAME,CITY); SPJ(SNO,PNO,JNO,QTY); 1、供应商表S由供应商代码(SNO)、供应商姓名(SNAME)、供应商状态(STATUS)、供应商所在城市(CITY)组成; 2、零件表P由零件代码(PNO)、零件名(PNAME)、颜色(COLOR)、重量(WEIGHT)组成; 3、工程项目表J由工程项目代码(JNO)、工程项目名(JNAME)、工程项目所在城市(CITY)组成; 4、供应情况表SPJ由供应商代码(SNO)、零件代码(PNO)、工程项目代码(JNO)、供应数量(QTY)组成,表示某供应商供应某种零件给某工程项目的数量为QTY。试用关系代数语言完成如下查询: 1)找出所有供应商的姓名和所在城市; 2)找出所有零件的名称、颜色、重量; 3)找出使用供应商S1所供应零件的工程号码; 4)找出工程项目J2使用的各种零件的名称及其数量; 5)找出上海厂商供应的所有零件号码; 6)找出使用上海产的零件的工程号码; 7)找出没有使用天津产的零件的工程号码; 8)把全部红色零件的颜色改成蓝色; 9)由S5供给J4的零件P6改为由S3供应,请作必要的修改;
10)从供应商关系中删除S2的记录,并从供应情况关系中删除相应的记录; 11)求供应工程J1零件的供应商号码SNO; 12)求供应工程J1零件P1的供应商号码SNO; 13)求供应工程J1零件为红色的供应商号SNO; 14)求没有使用天津供应商生产的红色零件的工程号JNO; 15)求S1提供的零件名PNAME; 16)求给工程J1和J2提供零件的供应商号码SNO; 解: 1)找出所有供应商的姓名和所在城市; Select SNAME,CITY From S 2)找出所有零件的名称、颜色、重量; Select PNAME,COLOR,WEIGHT From P 3)找出使用供应商S1所供应零件的工程号码; Select JNO From SPJ Where SNO= ‘S1’ 4)找出工程项目J2使用的各种零件的名称及其数量; Select PNAME,QTY From SPJ,P Where SPJ.PNO=P.PNO And JNO=‘J2’ 5)找出上海厂商供应的所有零件号码; Select PNO From S,SPJ Where SPJ.SNO=S.SNO And CITY=‘上海’
(精选)现代控制理论作业题答案
第九章 线性系统的状态空间分析与综合 9-1 设系统的微分方程为 u x x x =++23&&& 其中u 为输入量,x 为输出量。 ⑴ 设状态变量x x =1,x x &=2,试列写动态方程; ⑵ 设状态变换211x x x +=,2122x x x --=,试确定变换矩阵T 及变换后的动态方程。 解:⑴ u x x x x ??????+????????????--=???? ??1032102121&&,[]??????=2101x x y ; ⑵ ??????=??????2121x x T x x ,??????--=2111T ;?? ????--=-11121 T ;AT T A 1-=,B T B 1-=,CT C =; 得,??????--=2111T ;u x x x x ??????-+??????????? ?-=??????1110012121&&,[]??????=2111x x y 。 9-2 设系统的微分方程为 u y y y y 66116=+++&&&&&& 其中u 、y 分别系统为输入、输出量。试列写可控标准型(即A 为友矩阵)及可观标准型(即A 为友矩 阵转置)状态空间表达式,并画出状态变量图。 解:可控标准型和可观标准型状态空间表达式依次为, []x y u x x 00610061161 00010=??????????+??????????---=&;[]x y u x x 100 006610 1101600=???? ? ?????+??????? ???---=&; 可控标准型和可观标准型的状态变量图依次为, 9-3 已知系统结构图如图所示,其状态变量为1x 、2x 、3x 。试求动态方程,并画出状态变量图。 解:由图中信号关系得,31x x =&,u x x x 232212+--=&,32332x x x -=&,1x y =。动态方程为 u x x ?? ?? ? ?????+??????????---=020*********&,[]x y 001;
《土力学》第三章习题集及详细解答
《土力学》第三章习题集及详细解答 第3章土的渗透性及渗流 一、填空题 1.土体具有被液体透过的性质称为土的。 2.影响渗透系数的主要因素有:、、、、、 。 3.一般来讲,室内渗透试验有两种,即和。 4.渗流破坏主要有和两种基本形式。 5.达西定律只适用于的情况,而反映土的透水性的比例系数,称之为土的。 二选择题 1.反应土透水性质的指标是()。 A.不均匀系数 B.相对密实度 C.压缩系数 D.渗透系数 2.下列有关流土与管涌的概念,正确的说法是()。 A.发生流土时,水流向上渗流;发生管涌时,水流向下渗流 B.流土多发生在黏性土中,而管涌多发生在无黏性土中 C.流土属突发性破坏,管涌属渐进式破坏 D.流土属渗流破坏,管涌不属渗流破坏 3.土透水性的强弱可用土的哪一项指标来反映?()
A.压缩系数 B.固结系数 C.压缩模量 D.渗透系数 4.发生在地基中的下列现象,哪一种不属于渗透变形?() A.坑底隆起 B.流土 C.砂沸 D.流砂 5.下属关于渗流力的描述不正确的是()。 A.其数值与水力梯度成正比,其方向与渗流方向一致 B.是一种体积力,其量纲与重度的量纲相同 C.流网中等势线越密集的区域,其渗流力也越大 D.渗流力的存在对土体稳定总是不利的 6.下列哪一种土样更容易发生流砂?() A.砂砾或粗砂 B.细砂或粉砂 C.粉质黏土 D.黏土 7.成层土水平方向的等效渗透系数与垂直方向的等效渗透系数的关系是()。 A.> B.= C.< 8. 在渗流场中某点的渗流力()。 A.随水力梯度增加而增加 B.随水利力梯度增加而减少 C.与水力梯度无关 9.评价下列说法的正误。() ①土的渗透系数越大,土的透水性也越大,土的水力梯度也越大; ②任何一种土,只要水力梯度足够大,就有可能发生流土和管涌; ③土中任一点渗流力的大小取决于该点孔隙水总水头的大小; ④渗流力的大小不仅取决于水力梯度,还与其方向有关。 A.①对 B.②对 C.③和④对 D.全不对 10.下列描述正确的是()。
习题解答_现控理论_第6章
6-1 对线性系统 A B C D =+?? =+? x x u y x u 作状态反馈v x u +-=K ,试推导出闭环系统的状态空间模型和传递函数。 解 将反馈律代入状态空间模型,则有 ()()()()A B K A BK B C D K C DK D =+-+=-+=+-+=-+x x x v x v y x x v x v 因此,闭环系统的状态空间模型和传递函数分别为 1()()()()()K A BK B C DK D G s C DK sI A BK B D -=-+?? =-+?=--++x x v y x v 6-2 对线性系统 A B C D =+?? =+? x x u y x u 作输出反馈u =-H y +v ,试推导出闭环系统的状态空间模型和传递函数。 解 将反馈律代入状态空间模型的输出方程,则有 () C D H C DH D =+-+=-+y x y v x y v 即 ()I DH C D +=+y x v 因此,当()I DH +可逆时,闭环系统输出方程为 11()()I DH C I DH D --=+++y x v 将反馈律和上述输出方程代入状态方程,则有 11() [()][()]A B A B H A BH I DH C BH I DH D B --=+=+-+=-++++x x u x y v x v 当闭环系统的状态空间模型和传递函数分别为 1111 11111[()][()]()()()()[()][()]()H A BH I DH C BH I DH D B I DH C I DH D G s I DH C sI A BH I DH C BH I DH D B I DH D ---------?=-++++?=+++?=+-++++++x x v y x v
现代控制理论第3章答案
第三章习题 3-1判断下列系统的状态能控性和能观测性。系统中a,b,c,d 的取值对能控性和能观性是否有关,若有关,其取值条件如何? (1)系统如图3.16所示: 图3.16 系统模拟结构图 解:由图可得: 3 43432112332 211x y dx x x cx x x x x cx x bx x u ax x =-=-+=++-=-=+-=???? 状态空间表达式为: []x y u x x x x d c b a x x x x 01 000001100 011000000 43214321=? ???????????+????????????????????????----=??????? ? ??????????? ? 由于? 2x 、?3x 、? 4x 与u 无关,因而状态不能完全能控,为不能控系统。由于y 只与3x 有关,因而系统为不完全能观的,为不能观系统。 (3)系统如下式:
x d c y u b a x x x x x x ?? ????=??????????+????????????????? ???---=?????? ?????????? ?00000012200010011321321 解:如状态方程与输出方程所示,A 为约旦标准形。要使系统能控,控制矩阵b 中相对于约旦块的最后一行元素不能为0,故有0,0≠≠b a 。 要使系统能观,则C 中对应于约旦块的第一列元素不全为0,故有0,0≠≠d c 。 3-2时不变系统 X y u X X ?? ????-=?? ? ???+??????--=? 111111113113 试用两种方法判别其能控性和能观性。 解:方法一: []?? ?? ??==?? ????-=????? ?=??????--=2-2-1 12-2-1 1AB B M 1111,1111,3113C B A 系统不能控。 ,21<=rankM ??? ? ? ???????----= ??????=44221111CA C N 系统能观。,2=rankN 方法二:将系统化为约旦标准形。 ()4 20133113 A I 212 -=-==-+=+--+= -λλλλλλ,
高分子物理第三章习题及解答.docx
第三章 3.1 高分子的溶解 3.1.1 溶解与溶胀 例3-1 简述聚合物的溶解过程,并解释为什么大多聚合物的溶解速度很慢? 解:因为聚合物分子与溶剂分子的大小相差悬殊,两者的分子运动速度差别很大,溶剂分子能比较快地渗透进入高聚物,而高分子向溶剂地扩散却非常慢。这样,高聚物地溶解过程要经过两个阶段,先是溶剂分子渗入高聚物内部,使高聚物体积膨胀,称为“溶胀”,然后才是高分子均匀分散在溶剂中,形成完全溶解地分子分散的均相体系。整个过程往往需要较长的时间。 高聚物的聚集态又有非晶态和晶态之分。非晶态高聚物的分子堆砌比较松散,分子间的相互作用较弱,因而溶剂分子比较容易渗入高聚物内部使之溶胀和溶解。晶态高聚物由于分子排列规整,堆砌紧密,分子间相互作用力很强,以致溶剂分子渗入高聚物内部非常困难,因此晶态高聚物的溶解要困难得多。非极性的晶态高聚物(如PE)在室温很难溶解,往往要升温至其熔点附近,待晶态转变为非晶态后才可溶;而极性的晶态高聚物在室温就能溶解在极性溶剂中。 例3-2.用热力学原理解释溶解和溶胀。 解:(1)溶解:若高聚物自发地溶于溶剂中,则必须符合: 上式表明溶解的可能性取决于两个因素:焓的因素()和熵的因素()。焓的因素取决于溶剂对高聚物溶剂化作用,熵的因素决定于高聚物与溶剂体系的无序度。对于极性高聚物前者说影响较大,对于非极性高聚物后者影响较大。但一般来说,高聚物的溶解过程都是增加的,即>0。显然,要使<0,则要求越小越好,最好为负值或较小的正值。极性高聚物溶于极性溶剂,常因溶剂化作用而放热。因此,总小于零,即<0,溶解过程自发进行。根据晶格理论得 =(3-1) 式中称为Huggins参数,它反映高分子与溶剂混合时相互作用能的变化。的物理意义表示当一个溶剂分子放到高聚物中去时所引起的能量变化(因为)。而非极性高聚物溶于非极性溶剂,假定溶解过程没有体积的变化(即),其的计算可用Hildebrand的溶度公式: =(3-2) 式中是体积分数,是溶度参数,下标1和2分别表示溶剂和溶质,是溶液的总体积。从式中可知总是正的,当 时,。一般要求与的差不超过1.7~2。综上所述,便知选择溶剂时要求越小或和 相差越小越好的道理。 注意: ①Hildebrand公式中仅适用于非晶态、非极性的聚合物,仅考虑结构单元之间的色散力,因此用相近原则选择溶剂时有例外。相近原则只是必要条件,充分条件还应有溶剂与溶质的极性和形成的氢键程度要大致相等,即当考虑结构单元间除有色散力外,还有偶极力和氢键作用时,则有
现代控制理论第三章
2.6 可控性与可观性 26 2.6.1 概述 经典控 制论中: 系统用传递函数描述。 只注重输入-输出间的直接关系! 低阶系统,输出可控制亦可测量。 可控性与可观性不是问题。
现代控制论中: 系统描述:状态方程+输出方程 由于状态?输入,输出?状态 所以要控制输出,首先要控制状态 并且使输出随状态发生变化输 (1)输入?状态间的问题: 输入是否使状态发生希望的变化? ? 可控性问题 要使状态发生某种变化,输入? 要使状态发生某种变化,输入=? ? 最优控制问题
(2)输出?状态间的问题: 状态可否从输出得到? ? 可观测性问题 如何从输出得到? ? 最优估计问题 &可控性、可观性为现代控制理论的基础,例如最优控制与最优估计的基础! &如何处理可控性?可观测性?
可控性:系统输入对系统状态的有效控制能力 可观性:系统输出对系统状态的确切反映能力 问题: 状态可控?系统可控? 状态不可控?系统不可控? 状态可观测系统可测观 状态可观测?系统可测观? 状态不可观测?系统不可观测?
个系统的可控性和可观测性 ?分析如下4个系统的可控性和可观测性:x x 111001/????+??????=u dt d []x 11=???y x x 101/????+???????=u dt d x x 001/??+???=u dt d []x 01110=? ??y x 11110=?????????x x 0111/? ???+???=u dt d []y []x 0110=???????y
?x x 111001/????+??????=u dt d []x 11=? ??y x ∫ ?1 u y 1 2 x ∫ 1?
第3章习题及解答
第3章习题及解答 3.1分析图P3.1所示电路的逻辑功能,写出输出逻辑表达式,列出真值表,说明电路完成 何种逻辑功能。 F 图P3.1 题3.1 解:根据题意可写出输出逻辑表达式,并列写真值表为: B A AB F += 该电路完成同或功能 3.2 分析图P3.3所示电路的逻辑功能,写出输出1F 和2F 的逻辑表达式,列出真值表,说明 电路完成什么逻辑功能。 A B C F F 1 2 图P3.3 题3.3 解:根据题意可写出输出逻辑表达式为:
= + AC ⊕ = F+ ⊕ AB BC F C B A 1 2 列写真值表为: 该电路构成了一个全加器。 3.5 写出图P3.5所示电路的逻辑函数表达式,其中以S3、S2、S1、S0作为控制信号,A,B 作为数据输入,列表说明输出Y在S3~S0作用下与A、B的关系。 图P3.5 题3.5 解:由逻辑图可写出Y的逻辑表达式为: A S + ⊕ = + AB Y+ S S B B S A B 3 2 1 图中的S3、S2、S1、S0作为控制信号,用以选通待传送数据A、B,两类信号作用不同,分析中应区别开来,否则得不出正确结果。由于S3、S2、S1、S0共有16种取值组合,因此输出Y和A、B之间应有16种函数关系。列表如下:
3.7 设计一个含三台设备工作的故障显示器。要求如下:三台设备都正常工作时,绿灯亮; 仅一台设备发生故障时,黄灯亮;两台或两台以上设备同时发生故障时,红灯亮。 题3.7 解:设三台设备为A 、B 、C ,正常工作时为1,出现故障时为0; F 1为绿灯、F 2为黄灯、F 3为红灯,灯亮为1,灯灭为0。 根据题意可列写真值表为: 求得F 1、F 2、F 3的逻辑表达式分别为: C A C B B A F C AB C B A BC A F ABC F ++=++==321;; 根据逻辑表达式可画出电路图(图略)。 3.9 设计一个组合逻辑电路,该电路有三个输入信号ABC ,三个输出信号XYZ,输入和输出 信号均代表一个三位的二进制数。电路完成如下功能:
第三章练习学习题及参考解答
第三章练习题及参考解答 3.1 第三章的“引子”中分析了,经济增长、公共服务、市场价格、交通状况、社会环境、政策因素,都会影响中国汽车拥有量。为了研究一些主要因素与家用汽车拥有量的数量关系,选择“百户拥有家用汽车量”、“人均地区生产总值”、“城镇人口比重”、“交通工具消费价格指数”等变量,2011年全国各省市区的有关数据如下: 表3.6 2011年各地区的百户拥有家用汽车量等数据 资料来源:中国统计年鉴2012.中国统计出版社
1)建立百户拥有家用汽车量计量经济模型,估计参数并对模型加以检验,检验结论 的依据是什么?。 2)分析模型参数估计结果的经济意义,你如何解读模型估计检验的结果? 3) 你认为模型还可以如何改进? 【练习题3.1参考解答】: 1)建立线性回归模型: 1223344t t t t t Y X X X u ββββ=++++ 回归结果如下: 由F 统计量为17.87881, P 值为0.000001,可判断模型整体上显著, “人均地区生产总值”、“城镇人口比重”、“交通工具消费价格指数”等变量联合起来对百户拥有家用汽车量有显著影响。解释变量参数的t 统计量的绝对值均大于临界值0.025(27) 2.052t =,或P 值均明显小于0.05α=,表明在其他变量不变的情况下,“人均地区生产总值”、“城镇人口比重”、“交通工具消费价格指数”分别对百户拥有家用汽车量都有显著影响。 2)X2的参数估计值为5.9911,表明随着经济的增长,人均地区生产总值每增加1万元,平均说来百户拥有家用汽车量将增加近6辆。由于城镇公共交通的大力发展,有减少家用汽车的必要性,X3的参数估计值为-0.5231,表明随着城镇化的推进,“城镇人口比重”每增加1%,平均说来百户拥有家用汽车量将减少0.5231辆。汽车价格和使用费用的提高将抑制家用汽车的使用, X4的参数估计值为-2.2677,表明随着家用汽车使用成本的提高, “交通工具消费价格指数”每增加1个百分点,平均说来百户拥有家用汽车量将减少2.2677辆。 3)模型的可决系数为0.6652,说明模型中解释变量变解释了百户拥有家用汽车量变动的66.52%,还有33.48%未被解释。影响百户拥有家用汽车量的因素可能还有交通状况、社会环境、政策因素等,还可以考虑纳入一些解释变量。但是使用更多解释变量或许会面临某些基本假定的违反,需要采取一些其他措施。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流与电容上的电压作为状态变量的状态方程,与以电阻2R 上的电压作为输出量的输出方程。 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为: 1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式与传递函数阵。 解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述 列写其相应的状态空间表达式,并画出相应的模拟结构图。 解:令.. 3. 21y x y x y x ===,,,则有 相应的模拟结构图如下: 1-6 (2)已知系统传递函数2 )3)(2() 1(6)(+++= s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图 解:s s s s s s s s s W 31 233310)3(4)3)(2()1(6)(22++++- ++-=+++= 1-7 给定下列状态空间表达式 []??? ? ? ?????=???? ??????+????????????????????----=??????????321321321100210311032010x x x y u x x x x x x ‘ (1) 画出其模拟结构图 (2) 求系统的传递函数
材基第三章习题及答案
第三章 作业与习题的解答 一、作业: 2、纯铁的空位形成能为105 kJ/mol 。将纯铁加热到850℃后激冷至室温(20℃),假设高温下的空位能全部保留,试求过饱和空位浓度与室温平衡空位浓度的比值。(e 31.8=6.8X1013) 6、如图2-56,某晶体的滑移面上有一柏氏矢量为b 的位错环,并受到一均匀切应力τ。 (1)分析该位错环各段位错的结构类型。 (2)求各段位错线所受的力的大小及方向。 (3)在τ的作用下,该位错环将如何运动? (4)在τ的作用下,若使此位错环在晶体中稳定 不动,其最小半径应为多大? 解: (2)位错线受力方向如图,位于位错线所在平面,且于位错垂 直。 (3)右手法则(P95):(注意:大拇指向下,P90图3.8中位错 环ABCD 的箭头应是向内,即是位错环压缩)向外扩展(环扩大)。 如果上下分切应力方向转动180度,则位错环压缩。 (4) P103-104: 2sin 2d ?τd T s b = θRd s =d ; 2/sin 2 θ?d d = ∴ τ ττkGb b kGb b T R ===2 注:k 取0.5时,为P104中式3.19得出的结果。 7、在面心立方晶体中,把两个平行且同号的单位螺型位错从相距100nm 推进到3nm 时需要用多少功(已知晶体点阵常数a=0.3nm,G=7﹡1010Pa )? (31002100 32ln 22ππGb dr w r Gb ==?; 1.8X10-9J ) 8、在简单立方晶体的(100)面上有一个b=a[001]的螺位错。如果
它(a)被(001)面上b=a[010]的刃位错交割。(b)被(001)面上b=a[100]的螺位错交割,试问在这两种情形下每个位错上会形成割阶还是弯折? ((a ):见P98图3.21, NN ′在(100)面内,为扭折,刃型位错;(b)图3.22,NN ′垂直(100)面,为割阶,刃型位错) 9、一个 ]101[2- =a b 的螺位错在(111)面上运动。若在运动过程中遇 到障碍物而发生交滑移,请指出交滑移系统。 对FCC 结构:(1 1 -1)或写为(-1 -1 1) 10、面心立方晶体中,在(111)面上的单位位错]101[2-=a b ,在(111) 面上分解为两个肖克莱不全位错,请写出该位错反应,并证明所形成的扩展位错的宽度由下式给出: γπ242 b G d s ≈ 应为 γπ242a G d s ≈ (G 为切变模量,γ为层错能) (P116式3.33,两个矢量相乘的积=|b1|˙|b2|˙cos(两矢量夹角) 11、在面心立方晶体中,(111)晶面和)(- 111晶面上分别形成一个扩展位错: (111)晶面:]211[6]112[6]110[2----+→a a a =A+B )111(- 晶面:]211[6]211[6]011[2a a a +→-=C+D 两个扩展位错在各自晶面上滑动时,其领先位错相遇发生位错反应,求出新位错的柏氏矢量;用图解说明上述位错反应过程;分析新位错的组
现代控制理论课后习题答案
前言 本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。 本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。 书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。 由于时间比较仓促,可能存在错误,请读者批评、指正。另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。 编者 2005年5月 第2章 “控制系统的状态空间描述”习题解答 2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。 图P2.1 解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。这里采样机理分析法。 设1C 两端电压为1c u ,2C 两端的电压为2c u ,则 2 12221c c c du u C R u u dt ++= (1) 1121 21c c c du u du C C dt R dt += (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:
1121121121212111 c c c du R R C u u u dt R R C R C R C +=--+ 2121222222 111c c c du u u u dt R C R C R C =--+ 状态空间表达式为: 1211 1211212121 212 1222222 21111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +?=--+?? ? =--+?? ?==-?? && 即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +???? -???? ????????=+????????????--??????? ? && []11210x y u x ?? =-+???? 2.2 建立图P22所示系统的状态空间表达式。 1 图P2.2 解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1 dy dt ,24dy x dt =。 根据牛顿定律对1M 有: 211311 () d x x M x Kx B dt -=--&
《现代控制理论基础》第3章
第一和第二讲小结 一、状态空间表达式的标准形式 能控标准形 能观测标准形 对角线标准形 Jordan标准形 二、矩阵的特征值及对角线化 矩阵是能控标准形时的变换矩阵求法(1)特征值互异 (2)重根 (3)一般情形 三、利用MATLAB进行系统模型之间的相互转换 [A, B, C, D] = tf2ss (num, den) [num,den] = ss2tf [A,B,C,D,iu] 四、时域分析的基本概念 状态转移矩阵及其性质,凯莱-哈密尔顿定理 最小多项式 五、矩阵指数计算 级数法,对角线标准形与Jordan标准形法 拉氏变换法凯莱-哈密尔顿定理
II、分析部分 第三章线性多变量系统的能控性与能观测性分析 能控性(controllability)和能观测性(observability)深刻地揭示了系统的内部结构关系,由R.E.Kalman于60年代初首先提出并研究的这两个重要概念,在现代控制理论的研究与实践中,具有极其重要的意义,事实上,能控性与能观测性通常决定了最优控制问题解的存在性。例如,在极点配置问题中,状态反馈的的存在性将由系统的能控性决定;在观测器设计和最优估计中,将涉及到系统的能观测性条件。 在本章中,我们的讨论将限于线性系统。将首先给出能控性与能观测性的定义,然后推导出判别系统能控和能观测性的若干判据。 3.1 线性连续系统的能控性 3.1.1 概述 能控性和能观测性就是研究系统这个“黑箱”的内部的状态是否可由输入影响和是否可由输出反映。 例1.给定系统的描述为
u x x x x ??????+????????????-=??????2150042121 []?? ? ???-=2160 x x y 将其表为标量方程组的形式,有: u x x +=114 u x x 2522+-= 26x y -= 例3-2:判断下列电路的能控和能观测性 ) (t u + y C R ) (t u L y 2
第三章 系统时间响应习题及解答
第三章 线性系统的时域分析与校正 习题及答案 3-3 一阶系统结构图如图所示。要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。 解 由结构图写出闭环系统传递函数 111)(212211211 +=+=+ =ΦK K s K K K s K s K K s K s 令闭环增益21 2 == ΦK K , 得:5.02=K 令调节时间4.03 32 1≤==K K T t s ,得:151≥K 。 3-2 单位反馈系统的开环传递函数) 5(4 )(+= s s s G ,求单位阶跃响应)(t h 和调节时间 t s 。 解:依题,系统闭环传递函数 )1)(1(4) 4)(1(4 454)(2 12 T s T s s s s s s ++ =++=++= Φ ?? ?==25 .01 21T T 4 1)4)(1(4 )()()(210++++=++= Φ=s C s C s C s s s s R s s C 1) 4)(1(4 lim )()(lim 00 0=++=Φ=→→s s s R s s C s s 3 4 )4(4lim )()()1(lim 0 1 1-=+=Φ+=→-→s s s R s s C s s
3 1 )1(4lim )()()4(lim 0 4 2=+=Φ+=→-→s s s R s s C s s t t e e t h 43 1 341)(--+-= 421 =T T , ∴3.33.3111==??? ? ??=T T T t t s s 。 159.075.40''<''==T t s 3-3 机器人控制系统结构图如图所示。试确定参数 21,K K 值,使系统阶跃响应的峰值时间5.0=p t s ,超调 量%2%=σ。 解 依题,系统传递函数为 2 22 12121211 2)1()1()1(1) 1()(n n n s s K K s K K s K s s s K K s s K s ωξωωΦΦ++=+++=+++ += 由 ?? ???=-=≤=--5 .0102.0212n p o o t e ωξπσξπξ 联立求解得 ?? ?==10 78 .0n ωξ 比较)(s Φ分母系数得 ?? ? ??=-===146.0121001221K K K n n ξωω 3-4 某典型二阶系统的单位阶跃响应如图所示。试确定系统的闭环传递函数。
第三章练习题及参考解答
第三章练习题及参考解答 第三章的“引子”中分析了,经济增长、公共服务、市场价格、交通状况、社会环境、政策因素,都会影响中国汽车拥有量。为了研究一些主要因素与家用汽车拥有量的数量关系,选择“百户拥有家用汽车量”、“人均地区生产总值”、“城镇人口比重”、“交通工具消费价格指数”等变量,2011年全国各省市区的有关数据如下: 表 2011年各地区的百户拥有家用汽车量等数据
贵 州 云 南 西 藏 陕 西 甘 肃 青 海 宁 夏 新 疆 资料来源:中国统计年鉴2012.中国统计出版社 1)建立百户拥有家用汽车量计量经济模型,估计参数并对模型加以检验,检验结论 的依据是什么。 2)分析模型参数估计结果的经济意义,你如何解读模型估计检验的结果 3) 你认为模型还可以如何改进 【练习题参考解答】: 1)建立线性回归模型: 1223344t t t t t Y X X X u ββββ=++++ 回归结果如下: 由F 统计量为, P 值为,可判断模型整体上显著, “人均地区生产总值”、“城镇人口比重”、“交通工具消费价格指数”等变量联合起来对百户拥有家用汽车量有显著影响。解释变量参数的t 统计量的绝对值均大于临界值0.025(27) 2.052t =,或P 值均明显小于0.05α=,表明在其他变量不变的情况下,“人均地区生产总值”、“城镇人口比重”、“交通工具消费价格指数”分别对百户拥有家用汽车量都有显著影响。
2)X2的参数估计值为,表明随着经济的增长,人均地区生产总值每增加1万元,平均说来百户拥有家用汽车量将增加近6辆。由于城镇公共交通的大力发展,有减少家用汽车的必要性,X3的参数估计值为,表明随着城镇化的推进,“城镇人口比重”每增加1%,平均说来百户拥有家用汽车量将减少辆。汽车价格和使用费用的提高将抑制家用汽车的使用, X4的参数估计值为,表明随着家用汽车使用成本的提高, “交通工具消费价格指数”每增加1个百分点,平均说来百户拥有家用汽车量将减少辆。 3)模型的可决系数为,说明模型中解释变量变解释了百户拥有家用汽车量变动的%,还有%未被解释。影响百户拥有家用汽车量的因素可能还有交通状况、社会环境、政策因素等,还可以考虑纳入一些解释变量。但是使用更多解释变量或许会面临某些基本假定的违反,需要采取一些其他措施。 表是1994年-2011年中国的出口货物总额(Y)、工业增加值(X2)、人民币汇率(X3)的数据: 表出口货物总额、工业增加值、人民币汇率数据
实变函数第三章复习题及解答
第三章 复习题 一、判断题 1、设()f x 是定义在可测集n E R ?上的实函数,如果对任意实数a ,都有[()]E x f x a >为可测集,则()f x 为E 上的可测函数。(√ ) 2、设()f x 是定义在可测集n E R ?上的实函数,如果对某个实数a ,有[()]E x f x a >不是可测集,则()f x 不是E 上的可测函数。(√ ) 3、设()f x 是定义在可测集n E R ?上的实函数,则()f x 为E 上的可测函数等价于对某个实数a , [()]E x f x a ≥为可测集。(× ) 4、设()f x 是定义在可测集n E R ?上的实函数,则()f x 为E 上的可测函数等价于对任意实数a , [()]E x f x a =为可测集。(× ) 5、设()f x 是定义在可测集n E R ?上的实函数,则()f x 为E 上的可测函数等价于对任意实数a , [()]E x f x a ≤为可测集。(√ ) 6、设()f x 是定义在可测集n E R ?上的实函数,则()f x 为E 上的可测函数等价于对任意实数a 和b (a b <), [()]E x a f x b ≤<为可测集。(× ) 7、设E 是零测集,()f x 是E 上的实函数,则()f x 为E 上的可测函数。(√ ) 8、若可测集E 上的可测函数列{()n f x }在E 上几乎处处收敛于可测函数()f x ,则{()n f x }在E 上“基本上”一致收敛于()f x 。(× ) 9、设()f x 为可测集E 上几乎处处有限的可测函数,则()f x 在E 上“基本上”连续。(√ ) 10、设E 为可测集,若E 上的可测函数列()()n f x f x ?(x E ∈),则{()n f x }的任何子列都在E 上几乎处处收敛于可测函数()f x 。(× ) 11、设E 为可测集,若E 上的可测函数列()()n f x f x →..a e 于E ,则()()n f x f x ?(x E ∈)。(× )
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 1 1K s K K p +s K s K p 1 +s J 11s K n 2 2s J K b - + + - +- ) (s θ)(s U 图1-27系统方块结构图 解:系统的模拟结构图如下: ) (s U ) (s θ-- - + ++图1-30双输入--双输出系统模拟结构图 1 K p K K 1p K K 1++ +p K n K ? ? ?1 1J ? 2 J K b ? ?- 1 x 2 x 3 x 4 x 5x 6x 系统的状态方程如下:
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 1611166 13153 46 1 51 41 31 33 222 11+ - - =+-==+ + - - == =? ? ? ? ? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????????? ???????????=??????? ? ?????????? ????+?? ???????? ?????????????????????? ? ??? ? ???????? ?---- -=??????????????????????????????6543211654321111111126543 2100 0001 000000 00 0000 0001 00100000 000 000 10 x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 R1 L1 R2 L2 C U ---------Uc --------- i1 i2图1-28 电路图