汽车理论1-4MATLAB编程
汽车理论1-4MATLAB 编程
0102030405060708090100
5000
10000
15000
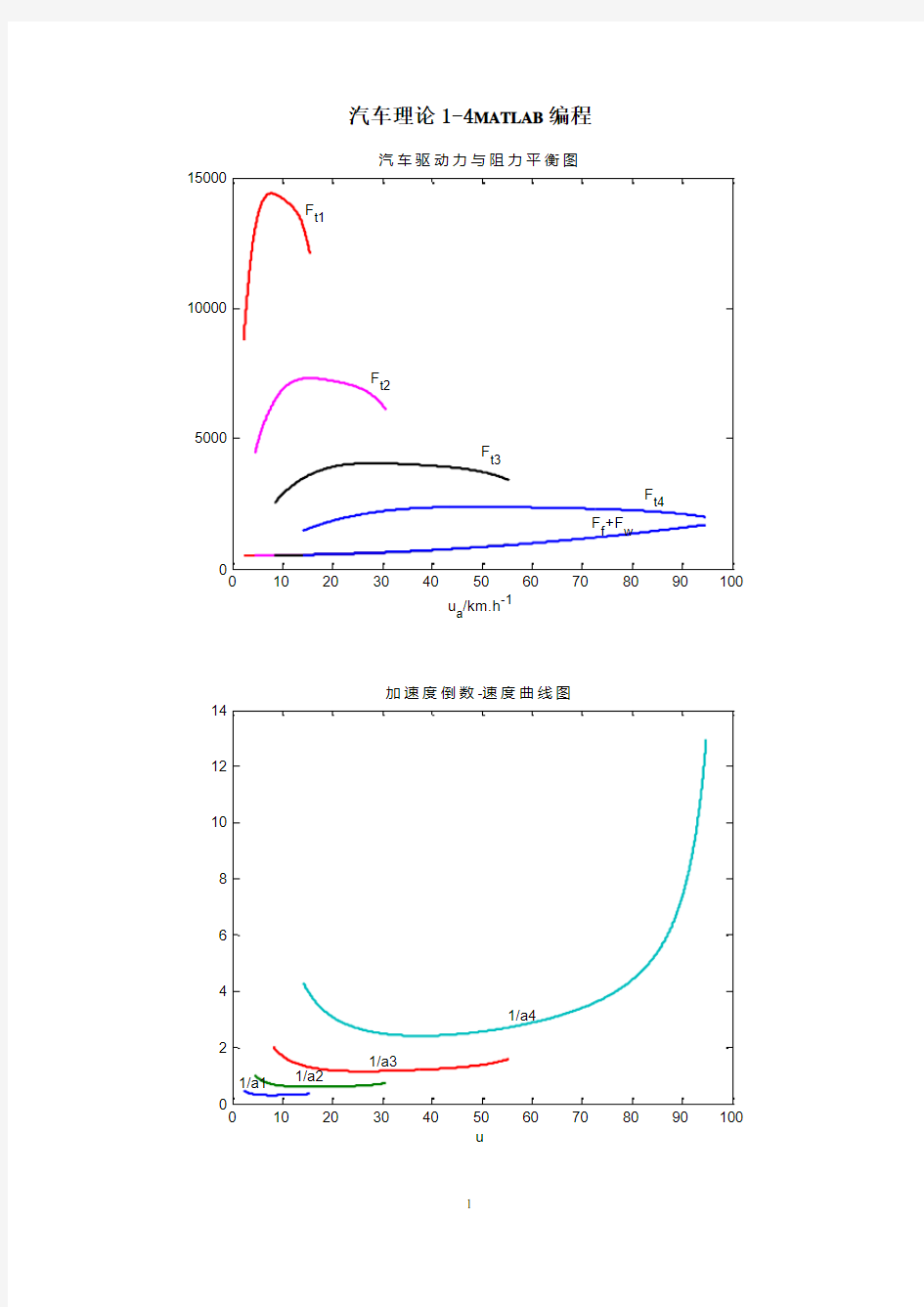
汽车驱动力与阻力平衡图
u a /km.h -1
F /N
1020
3040
5060708090100
024
68
10
12
14
加速度倒数-速度曲线图
u
1/a
010203040
5060708090100
10
20
30
40
50
60
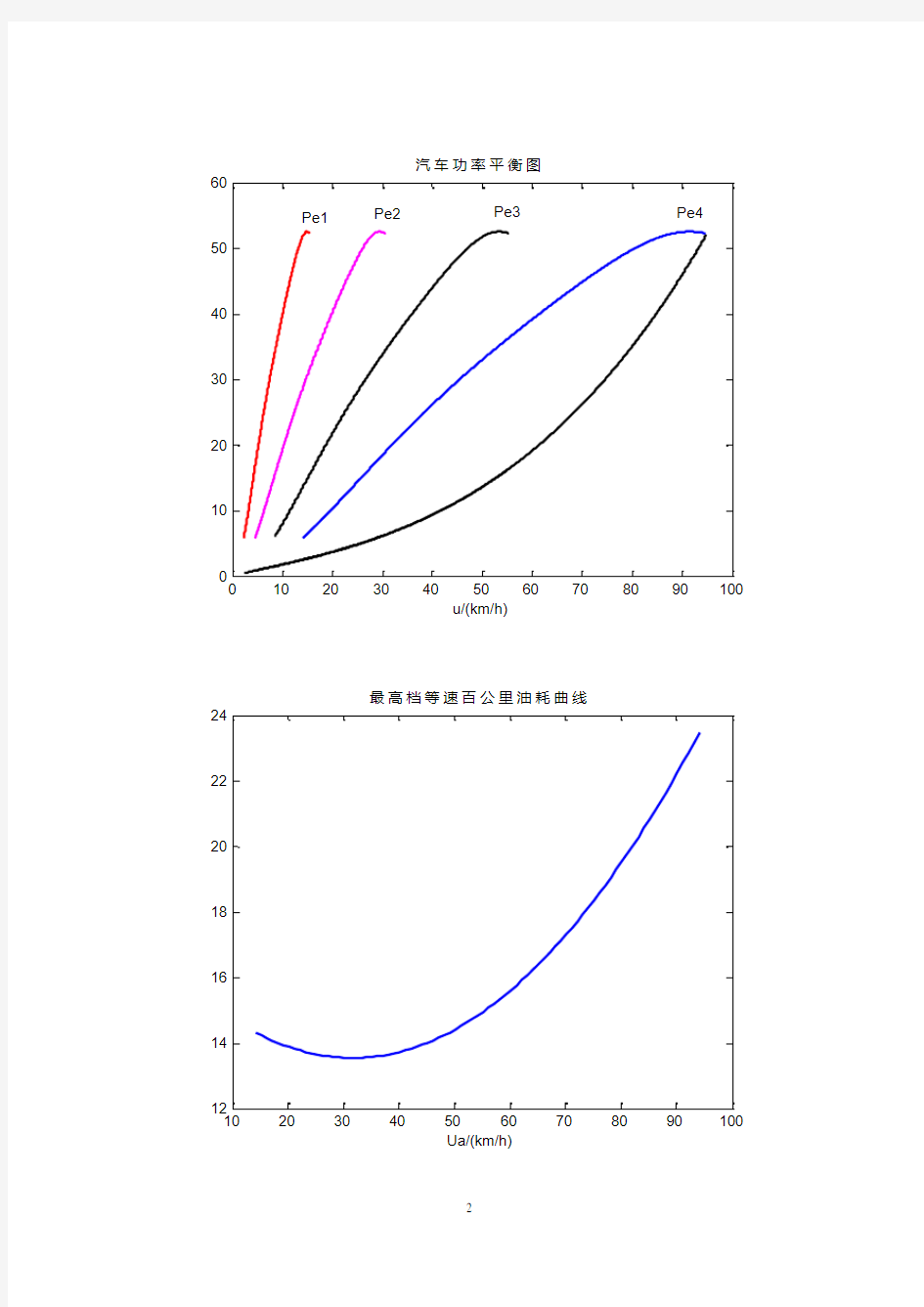
u/(km/h)
P /k W
汽车功率平衡图
10
203040
5060708090100
1214
16
18
20
22
24
最高档等速百公里油耗曲线
Ua/(km/h)
Q s /L
23
2425
2627
2829
1213
14
15
16
17
18
燃油积极性-加速时间曲线
燃油经济性(qs/L)
动力性--原地起步加速时间 (s t /s )
源程序:
《第一章》
m=3880; g=9.8; r=0.367; x=0.85; f=0.013; io=5.83; CdA=2.77; If=0.218; Iw1=1.798; Iw2=3.598; Iw=Iw1+Iw2;
ig=[6.09 3.09 1.71 1.00]; %变速器传动比 L=3.2; a=1.947; hg=0.9;
n=600:1:4000;
T=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; Ft1=T*ig(1)*io*x/r;%计算各档对应转速下的驱动力
Ft2=T*ig(2)*io*x/r;
Ft3=T*ig(3)*io*x/r;
Ft4=T*ig(4)*io*x/r;
u1=0.377*r*n/(io*ig(1));
u2=0.377*r*n/(io*ig(2));
u3=0.377*r*n/(io*ig(3));
u4=0.377*r*n/(io*ig(4));
u=0:130/3400:130;
F1=m*g*f+CdA*u1.^2/21.15;%计算各档对应转速下的驱动阻力
F2=m*g*f+CdA*u2.^2/21.15;
F3=m*g*f+CdA*u3.^2/21.15;
F4=m*g*f+CdA*u4.^2/21.15;
figure(1);
plot(u1,Ft1,'-r',u2,Ft2,'-m',u3,Ft3,'-k',u4,Ft4,'-b',u1,F1,'-r',u2,F2,'-m',u3,F3,'-k',u4,F4,'-b','LineWidth',2)
title('汽车驱动力与阻力平衡图');
xlabel('u_{a}/km.h^{-1}')
ylabel('F/N')
gtext('F_{t1}')
gtext('F_{t2}')
gtext('F_{t3}')
gtext('F_{t4}')
gtext('F_{f}+F_{w}')
%由汽车驱动力与阻力平衡图知,他们无交点,u4在最大转速时达到最大
umax=u4(3401)
Ft1max=max(Ft1);
imax=(Ft1max-m*g*f)/(m*g)
disp('假设是后轮驱动');
C=imax/(a/L+hg*imax/L) % 附着率
delta1=1+(Iw1+Iw2)/(m*r^2)+If*ig(1)*r^2*io^2*x/(m*r^2);
delta2=1+(Iw1+Iw2)/(m*r^2)+If*ig(2)*r^2*io^2*x/(m*r^2);
delta3=1+(Iw1+Iw2)/(m*r^2)+If*ig(3)*r^2*io^2*x/(m*r^2);
delta4=1+(Iw1+Iw2)/(m*r^2)+If*ig(4)*r^2*io^2*x/(m*r^2);
a1=(Ft1-F1)/(delta1*m); %加速度
a2=(Ft2-F2)/(delta2*m);
a3=(Ft3-F3)/(delta3*m);
a4=(Ft4-F4)/(delta4*m);
h1=1./a1; %加速度倒数
h2=1./a2;
h3=1./a3;
h4=1./a4;
figure(2);
plot(u1,h1,u2,h2,u3,h3,u4,h4,'LineWidth',2); title('加速度倒数-速度曲线图');
xlabel('u')
ylabel('1/a')
gtext('1/a1')
gtext('1/a2')
gtext('1/a3')
gtext('1/a4')
%由加速度倒数-速度曲线图可知
u1min=min(u1);
u1max=max(u1);
u2min=u1max;
u2min=min(u2);
u2max=max(u2);
u3min=u2max;
u3max=max(u3);
u4min=u3max;
u4max=70;
x1=[];
x2=[];
x3=[];
x4=[];
y=3401;
for i=1:3401;
if u3(i)<=u3min;
x1=[i];
end
end
q1=max(x1);
ua3=u3(q1:y);
a3=h3(q1:y);
for i=1:3401;
if u4(i)<=u4min;
x2=[i];
elseif u4(i)<=u4max;
x3=[i];
end
end
q2=max(x2);
q3=max(x3);
ua4=u4(q2:q3);
a4=h4(q2:q3);
s1=trapz(h2,u2 ); %二挡运行时间
s2=trapz(ua3,a3);
s3=trapz(ua4,a4);
s=[s1 s2 s3];
disp('积分得')
t=sum(s)*1000/3600 %总时间
《第二章》
Pe1=Ft1.*u1./3600;%计算各档对应转速下的功率
Pe2=Ft2.*u2./3600;
Pe3=Ft3.*u3./3600;
Pe4=Ft4.*u4./3600;
P1=F1.*u1./(3600*x);%计算各档对应的各个车速下的行驶功率
P2=F2.*u2./ (3600*x);
P3=F3.*u3./ (3600*x);
P4=F4.*u4./ (3600*x);
figure(3);
plot(u1,Pe1,'-r',u2,Pe2,'-m',u3,Pe3,'-k',u4,Pe4,'-b',u1,P1,'k',u2,P2,'k',u3,P3,'k', u4,P4,'k','linewidth',2);
gtext('Pe1')
gtext('Pe2')
gtext('Pe3')
gtext('Pe4')
xlabel('u/(km/h)');
ylabel('P/kW');
title('汽车功率平衡图');
n=[815 1207 1614 2012 2603 3006 3403 3804];
Ua=[];
Ua=0.377*r*n./(io*ig(4))
ft=[];
ft=m*g*f+(2.77/21.15)*Ua.^2;%计算各转速对应的各个车速下的行驶阻力
Pe(1)=ft(1).*Ua(1)./(3600*x);%计算各转速对应的各个车速下的行驶阻力功率
Pe(2)=ft(2).*Ua(2)./(3600*x);
Pe(3)=ft(3).*Ua(3)./(3600*x);
Pe(4)=ft(4).*Ua(4)./(3600*x);
Pe(5)=ft(5).*Ua(5)./(3600*x);
Pe(6)=ft(6).*Ua(6)./(3600*x);
Pe(7)=ft(7).*Ua(7)./(3600*x);
Pe(8)=ft(8).*Ua(8)./(3600*x)
B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];
B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];
B2=[72.739 36.657 14.525 7.0035 4.4763 2.8593 2.9788 0.7113];
B3=[-5.8629 -2.0533 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];
B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230
-0.000038568];
b1=(B0(1))+(B1(1)*Pe(1))+(B2(1)*Pe(1)^2)+(B3(1)*Pe(1)^3)+(B4(1)*Pe(1)^4);
b2=(B0(2))+(B1(2)*Pe(2))+(B2(2)*Pe(2)^2)+(B3(2)*Pe(2)^3)+(B4(2)*Pe(2)^4);
b3=(B0(3))+(B1(3)*Pe(3))+(B2(3)*Pe(3)^2)+(B3(3)*Pe(3)^3)+(B4(3)*Pe(3)^4);
b4=(B0(4))+(B1(4)*Pe(4))+(B2(4)*Pe(4)^2)+(B3(4)*Pe(4)^3)+(B4(4)*Pe(4)^4);
b5=(B0(5))+(B1(5)*Pe(5))+(B2(5)*Pe(5)^2)+(B3(5)*Pe(5)^3)+(B4(5)*Pe(5)^4);
b6=(B0(6))+(B1(6)*Pe(6))+(B2(6)*Pe(6)^2)+(B3(6)*Pe(6)^3)+(B4(6)*Pe(6)^4);
b7=(B0(7))+(B1(7)*Pe(7))+(B2(7)*Pe(7)^2)+(B3(7)*Pe(7)^3)+(B4(7)*Pe(7)^4);
b8=(B0(8))+(B1(8)*Pe(8))+(B2(8)*Pe(8)^2)+(B3(8)*Pe(8)^3)+(B4(8)*Pe(8)^4);
p=0.7;
Qs=[];
Qs(1)=(Pe(1)*b1)/(1.02*Ua(1).*p*g);
Qs(2)=(Pe(2)*b2)/(1.02*Ua(2).*p*g);
Qs(3)=(Pe(3)*b3)/(1.02*Ua(3).*p*g);
Qs(4)=(Pe(4)*b4)/(1.02*Ua(4).*p*g);
Qs(5)=(Pe(5)*b5)/(1.02*Ua(5).*p*g);
Qs(6)=(Pe(6)*b6)/(1.02*Ua(6).*p*g);
Qs(7)=(Pe(7)*b7)/(1.02*Ua(7).*p*g);
Qs(8)=(Pe(8)*b8)/(1.02*Ua(8).*p*g);
M=polyfit(Ua,Qs,2);
UA=0.377*r*600/(ig(4)*io):1:0.377*r*4000/(ig(4)*io);%UA表示车速
QS=polyval(M,UA);%QS表示油耗
figure(4);
plot(UA,QS,'linewidth',2);
title('最高档等速百公里油耗曲线');
xlabel('Ua/(km/h)');
ylabel('Qs/L');
《第三章》
io=[5.17 5.43 5.83 6.17 6.33];
Va=0.377*r*n(7)./(io.*ig(4));
Ps=46.9366;
disp('假设以最高档,较高转速(n取3401 ),最经济负荷(即90%负荷大约 46.9366Kw)行驶时油耗')
qs=[];
qs(1)=(Ps*b7)/(1.02*Va(1).*p*g);
qs(2)=(Ps*b7)/(1.02*Va(2).*p*g);
qs(3)=(Ps*b7)/(1.02*Va(3).*p*g);
qs(4)=(Ps*b7)/(1.02*Va(4).*p*g);
qs(5)=(Ps*b7)/(1.02*Va(5).*p*g);
st=[ 17.5813 16.2121 14.5126 13.3775 12.9185];%加速时间:(这里以最高档〈四档〉、速度由0加速到94.93Km/h 的时间)因与题1.3第三问求法相同,这里不在累述,可直接有计算机求得:
figure(5);
plot(qs,st,'+','linewidth',2) hold on
plot(qs,st,'linewidth',2); gtext('5.17') gtext('5.43') gtext('5.83') gtext('6.17') gtext('6.33')
title('燃油积极性-加速时间曲线'); xlabel('燃油经济性(qs/L)');
ylabel('动力性--原地起步加速时间 (st/s)');
《第四章》 4-3
1)
前轴利用附着系数为:g
f zh b z
L +=
β?
后轴利用附着系数为: ()g
r zh a z
L --=β?1
空载时:g
h b L -=
β?0=
413.0845
.085
.138.095.3-=-?
所以0??>空载时后轮总是先抱死。
满载时:g
h b L -=
β?0
=
4282.017
.11
38.095.3=-?
0??<时:前轮先抱死
0??>时:后轮先抱死
利用MATLAB 作图得到下图:
2)由MA TLAB 计算知当φ=0.8时,(空载)制动效率为0.6720
所以其最大制动减速度为g g a b 5376.06720.08.0max =?=
代入公式:
max
2
022
92.2526.31b a a a u u s +??? ??''+'=ττ g
56.092.253030202.002.06.312?+???? ??+==6.57m 计算可得:满载时 制动效率为0.87
因此其最大动减速度g g a b 696.087.08.0max '=?= 制动距离
max
2
022
92.2526.31b a a a u u s +??? ??''+'=ττ g
696.092.253030202.002.06.312
?+
???? ??+==5.34m 3)A.若制动系前部管路损坏 Gz dt
du
g G F xb ==2 )(2g z zh a L
G
F -=
?后轴利用附着系数 g r zh a Lz
-=
?
?后轴制动效率L
h L
a z
E g r r
r /1/??+=
=
代入数据得:空载时:r E =0.45
满载时:r E =0.60
a)空载时 其最大动减速度g g a b 36.045.08.0max =?= 代入公式:
max
2
022
92.2526.31b a a a u u s +??? ??''+'=ττ g
36.092.253030202.002.06.312?+???? ??+==10.09m
b)满载时 其最大动减速度g g a b 48.06.08.0max =?= 代入公式:
max
2
022
92.2526.31b a a a u u s +??? ??''+'=ττ g
48.092.253030202.002.06.312?+???? ??+==7.63m
B .若制动系后部管路损坏 Gz dt
du
g G F xb ==1 )(1g z zh b L
G
F +=
?前轴利用附着系数 g
f zh b Lz
+=
?
?前轴制动效率L
h L
b z
E g f f
f /1/??-=
=
代入数据 空载时:f E =0.57
满载时:f E =0.33
a)空载时 其最大动减速度g g a b 456.057.08.0max =?= 代入公式:
max
2
022
92.2526.31b a a a u u s +??? ??''+'=ττ g
456.092.253030202.002.06.312?+???? ??+==8.02m
b)满载时 其最大动减速度g g a b 264.033.08.0max =?= 代入公式:
max
2
022
92.2526.31b a a a u u s +??? ??''+'=ττ g
264.092.253030202.002.06.312?+???? ??+==13.67m
4-5
1)同步附着系数8.063
.025
.165.07.20=-?=-=
g h b L β? 2)因7.0=?0?< 所以前轮先抱死 L
h L
b z
E g f f
f //?β?-=
= 7.0=f ?
=
7
.2/63.07.065.07
.2/25.1?-=0.951
3)最大制动减速度:
max b a =2/53.67.0s m g E f =??
4)T
'
u
F G =
65.0=β
a) 1失效
''2
27.0)1(22
1)1(G G T F T F u
u =-=-=ββ
2失效
''1
13.122
1G G T F T F u
u ===ββ b)1失效
'2121G T F u =
2失效
'2121G T F u =
c) 1失效
'2121G T F u =
2失效
'2
121G T F u =
5)a)1失效Gz dt
du
g G F xb ==2 )(2g z zh a L
G
F -=
?后轴利用附着系数 g
r zh a Lz
-=
?
?后轴制动效率L h L a z
E g r r
r /1/??+=
=
=?+=7
.2/63.07.017
.2/45.10.46
最大动减速度g g a b 32.046.07.0max =?= 2失效Gz dt
du
g G F xb ==
1 )(1g z zh b L
G
F +=
?前轴利用附着系数 g
f zh b Lz
+=?
?前轴制动效率
L h L b z
E g f f
f /1/??-=
=
=?-=7
.2/63.07.017
.2/25.10.55
最大动减速度g g a b 39.055.07.0max
=?=
b)由第2)问 知:前轮先抱死 1失效与2失效情况相同。
Gz dt
du
g G F xb ββ
==1 )(1g z zh b L
G
F +=
?前轴利用附着系数 g
f
zh b Lz
+=
β?
?前轴制动效率
L h L b z
E g f f
f //?β?-=
=
=7
.2/63.07.065.07
.2/25.1?-=0.95
最大动减速度g g a b 33.02
1
95.07.0max =?
?= c) 与b )回路的情况相同。 6) 比较优缺点:
a ) 其中一个回路失效时,不易发生制动跑偏现象。但当1失效时,容易后轮先抱死,发生后轴测滑的不稳定的危险工况。
b )实现左右侧轮制动器制动力的完全相等比较困难。
c ) 实现左右侧轮制动器制动力的完全相等比较困难。其中一个管路失效时,极容易制动跑偏。