机器人开发工具简介
2. 仿真系统的实现:
为了降低系统设计复杂度,提高可操纵性,本系统采用模块化结构设计,具体可划分为核心引擎模块,显示模块,用户处理模块和总控模块。这种设计的好处还表现在可以明确清晰的划分系统各部分功能,并有利于使用者学习与掌握本智能机器人的原理,本节将详细介绍各模块的内部结构和功能。
2.1核心引擎模块(Core Engine layer):
核心引擎模块是整个仿真系统的基础,它不仅仅承担着支撑整个系统的运算处理的任务,还承担着使系统运行在高质量高速度环境下的重要任务,这个模块主要包括物理引擎和渲染引擎两大部分。物理引擎能够对基本物理关系、运动学以及动力学进行参数化仿真,实现物理运动过程仿真的流畅处理。渲染引擎根据3D顶点模型构建渲染实体,并进行实时渲染,使仿真环境呈现完全真实的视觉效果。
2.1.1 物理引擎
在仿真环境中,由于物体之间的设定是完全遵照于刚体的运动、旋转、碰撞的物理模型,所有的运动都是一种理想化的过程。但是在现实世界中,完全的刚性运动是不可能发生的,这其中包括地球的万有引力以及真实环境的影响,所以我们在底层开发中,引入了NVIDIA 公司的PhysX 。它可以模拟真实世界的物理运动规律,从而给用户提供更为真实的仿真环境。
PhysX 是一套物理运算引擎,具有粒子、流体、软体、关节、布料等五大应用。它可以计算三维场景中,物体与场景之间、物体与角色之间、物体与物体之间的运动交互与力学特性,使用户看到更加逼真的物理效果,易于算法的开发和实现。在PhysX的开发中,首先定义各种不同的角色(actor),然后指定每个角色的形状(shape)属性和刚体(body)属性,这样导入的物体就将具有坐标系,位置,速度,加速度,动量,力、旋转运动、能量、摩擦、冲击力等物理属性。同时它还具有碰撞检测功能,突破了按预定义脚本执行的局限性,保证了物理实体的物理仿真度。
2.1.2 渲染引擎
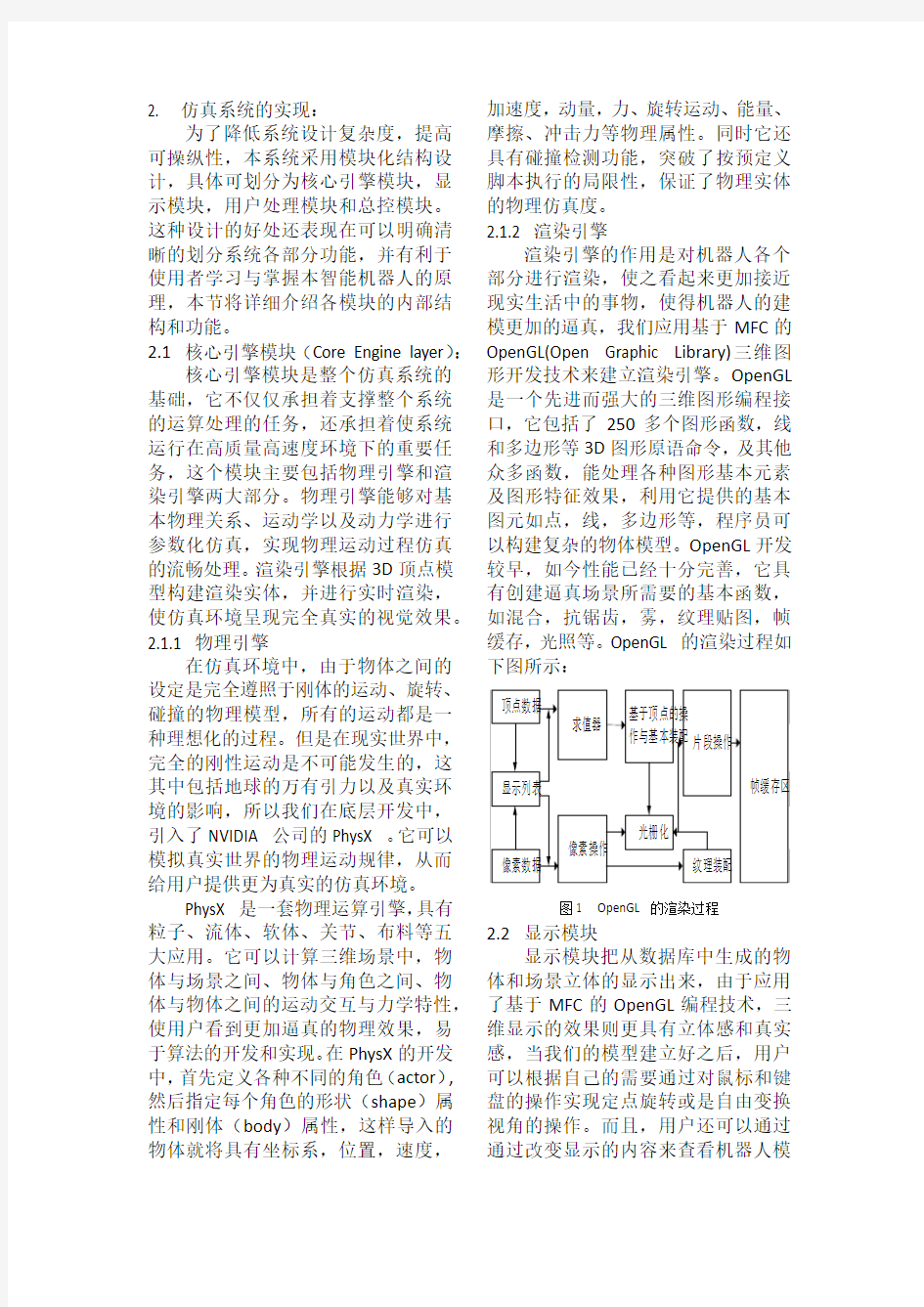
渲染引擎的作用是对机器人各个部分进行渲染,使之看起来更加接近现实生活中的事物,使得机器人的建模更加的逼真,我们应用基于MFC的OpenGL(Open Graphic Library)三维图形开发技术来建立渲染引擎。OpenGL 是一个先进而强大的三维图形编程接口,它包括了250多个图形函数,线和多边形等3D图形原语命令,及其他众多函数,能处理各种图形基本元素及图形特征效果,利用它提供的基本图元如点,线,多边形等,程序员可以构建复杂的物体模型。OpenGL开发较早,如今性能已经十分完善,它具有创建逼真场景所需要的基本函数,如混合,抗锯齿,雾,纹理贴图,帧缓存,光照等。OpenGL 的渲染过程如下图所示:
图1 OpenGL 的渲染过程
2.2显示模块
显示模块把从数据库中生成的物体和场景立体的显示出来,由于应用了基于MFC的OpenGL编程技术,三维显示的效果则更具有立体感和真实感,当我们的模型建立好之后,用户可以根据自己的需要通过对鼠标和键盘的操作实现定点旋转或是自由变换视角的操作。而且,用户还可以通过通过改变显示的内容来查看机器人模
型的物理结构和矢量图等,从而更加方便的分析机器人的运动状态。
2.3用户控制模块:
用户可以通过开放的系统接口对导入的实物模型进行控制,以有效的方式实现人与计算机的对话。在本教育机器人中可以体现为:用户无需理解系统的内部构造,通过简单的了解窗口页面各个部分的功能就可以使用公开的接口按照自己的需求编写控制程序,而后生成DLL文件,并通过在系统中动态加载DLL文件的方式控制机器人的位置,姿态,运动以及关节等属性。从而达到可以简单控制机器人,并使机器人教学简化的目的。
2.4 总控模块:
总控模块是系统的核心,它通过创建3D模型,维护和管理环境变量,对物理引擎和渲染引擎进行时钟控制,开放用户控制接口与用户达到人机交互;总控模块包括时序控制,用户接口,环境变量的维护和管理,模型创建与更新等几个部分。下面分别对时序控制和创建更新模型部分进行简单介绍:
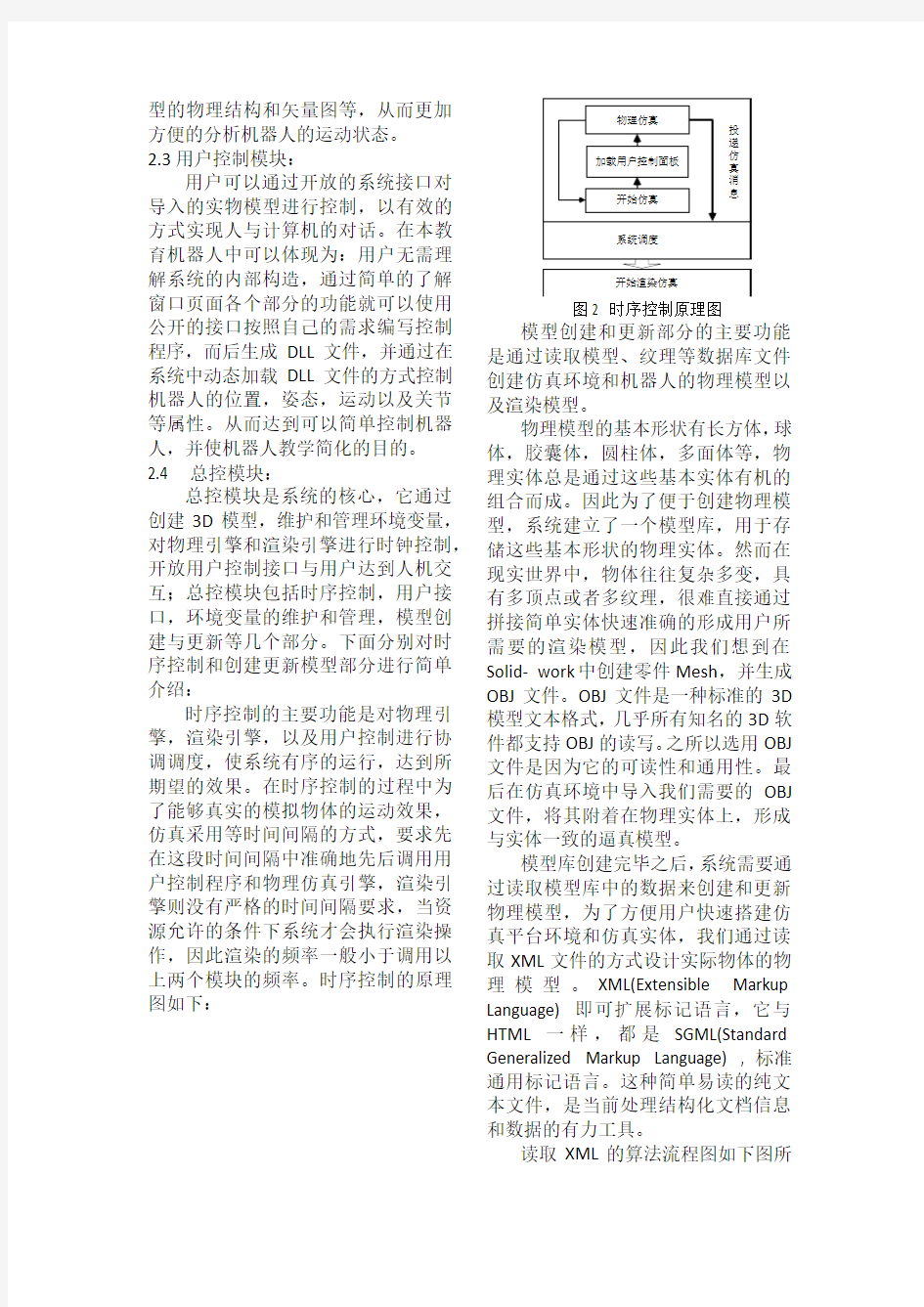
时序控制的主要功能是对物理引擎,渲染引擎,以及用户控制进行协调调度,使系统有序的运行,达到所期望的效果。在时序控制的过程中为了能够真实的模拟物体的运动效果,仿真采用等时间间隔的方式,要求先在这段时间间隔中准确地先后调用用户控制程序和物理仿真引擎,渲染引擎则没有严格的时间间隔要求,当资源允许的条件下系统才会执行渲染操作,因此渲染的频率一般小于调用以上两个模块的频率。时序控制的原理图如下:
图2 时序控制原理图
模型创建和更新部分的主要功能是通过读取模型、纹理等数据库文件创建仿真环境和机器人的物理模型以及渲染模型。
物理模型的基本形状有长方体,球体,胶囊体,圆柱体,多面体等,物理实体总是通过这些基本实体有机的组合而成。因此为了便于创建物理模型,系统建立了一个模型库,用于存储这些基本形状的物理实体。然而在现实世界中,物体往往复杂多变,具有多顶点或者多纹理,很难直接通过拼接简单实体快速准确的形成用户所需要的渲染模型,因此我们想到在Solid- work中创建零件Mesh,并生成OBJ文件。OBJ文件是一种标准的3D 模型文本格式,几乎所有知名的3D软件都支持OBJ的读写。之所以选用OBJ 文件是因为它的可读性和通用性。最后在仿真环境中导入我们需要的OBJ 文件,将其附着在物理实体上,形成与实体一致的逼真模型。
模型库创建完毕之后,系统需要通过读取模型库中的数据来创建和更新物理模型,为了方便用户快速搭建仿真平台环境和仿真实体,我们通过读取XML文件的方式设计实际物体的物理模型。XML(Extensible Markup Language) 即可扩展标记语言,它与HTML一样,都是SGML(Standard Generalized Markup Language) , 标准通用标记语言。这种简单易读的纯文本文件,是当前处理结构化文档信息和数据的有力工具。
读取XML的算法流程图如下图所
示:
图3 读取XML的算法流程图
工业机器人设计(大四机器人课设作业)(DOC)
“工业机器人”设计大作业 作品题目:货物装卸机器人 专业:机械设计制造及其自动化 姓名:班级:学号: 姓名:班级:学号: 姓名:班级:学号: 指导教师:陈明
1 前言 货物装卸作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。货物装卸机器人可安装不同的末端执行器以完成各种不同形状和状态的工件货物装卸工作,大大减轻了人类繁重的体力劳动。目前世界上使用的货物装卸机器人愈10 万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛货物装卸、集装箱等的自动货物装卸。部分发达国家已制定出人工货物装卸的最大限度,超过限度的必须由货物装卸机器人来完成。装卸货物装卸是物流的功能要素之一,在物流系统中发生的频率很高 2 设计方案论证 本课题通过对货物装卸机器人工作对象及工作场所的分析研究,深入了解其工作是 如何进行,各部分零部件应该如何运行以及如何紧密配合,先确定其总体结构再对主要 零部件进行设计计算确定其尺寸大小以及确定电机型号。 2.1 基本思想 (1)设计要考虑要求和工作环境的限制。 (2)考虑到货物装卸货物时所需要精确度不是很高,为了简化结构,境地成本,采用 角铁焊接结构。 (3)为了满足设计要求,须设计三个独立的电机驱动系统,各部分之间通过计算 机控制、协调工作。 (4)本次设计只是该题目的机械部分,而对应控制部件的考虑较少。 3 仓库货物装卸机器人的设计计算 3.1 货物装载伸缩装置的设计 3.1.1 确定传动方案 我们所学的传动方式有以下几种:带传动、链传动、齿轮传动、蜗轮蜗杆传动和钢 丝绳传动等,一般地说,啮合传动传递功率的能力高于摩擦传动;蜗轮传动工作的发热 情况较为严重,因而传动的功率不宜过大;摩擦轮传动由于必须有足够的压紧力,故而 在传递同一圆周力时,其压轴力比齿轮传动的大几倍,因而不宜用于大功率传动。带传
工业机器人课程设计说明书
工业机器人课程设计基于Matlab的工业机器人运动学和雅克比运动分析 班级: 学号 姓名:
目录 摘要 ..................................................................................................................................................... - 2 - PUMA560机器人简介 ...................................................................................................................... - 3 - 一、PUMA560机器人的正解 .......................................................................................................... - 4 - 1.1、确定D-H 坐标系 .................................................................................................................... - 4 - 1.2、确定各连杆D-H 参数和关节变量 ........................................................................................ - 4 - 1.3、求出两杆间的位姿矩阵 ......................................................................................................... - 4 - 1.4、求末杆的位姿矩阵 ................................................................................................................. - 5 - 1.5、M A TLAB 编程求解 .................................................................................................................. - 6 - 1.6、验证 ......................................................................................................................................... - 6 - 二、PUMA560机器人的逆解 .......................................................................................................... - 7 - 2.1、求1θ ........................................................................................................................................ - 7 - 2.2、求3θ ........................................................................................................................................ - 7 - 2.3、求2θ ........................................................................................................................................ - 8 - 2.4、求4θ ........................................................................................................................................ - 9 - 2.5、求5θ ........................................................................................................................................ - 9 - 2.6、求 6 θ ...................................................................................................................................... - 10 - 2.7、解的多重性 ........................................................................................................................... - 10 - 2.8、M A TLAB 编程求解 ................................................................................................................ - 10 - 2.9、对于机器人解的分析 ........................................................................................................... - 10 - 三、机器人的雅克比矩阵 ............................................................................................................... - 11 - 3.1、定义 ....................................................................................................................................... - 11 - 3.2、雅可比矩阵的求法 ............................................................................................................... - 11 - 3.3、微分变换法求机器人的雅可比矩阵 ................................................................................... - 12 - 3.4、矢量积法求机器人的雅克比矩阵 ....................................................................................... - 13 - 3.5、M A TLAB 编程求解 ................................................................................................................ - 14 - 附录 ................................................................................................................................................... - 15 - 1、M ATLAB 程序 ........................................................................................................................... - 15 - 2、三维图 ...................................................................................................................................... - 24 -
工业机器人课程设计
河南机电高等专科学校《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号: 姓名:流星 2014 年 10 月 1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15) 一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一
步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,利用限位开关来保护电机和控制机械手位置的准停。 这个课题可以充分的体现机电一体化的由程序自动控制机械结构的运动,对自己以前的所学的课程也是一种巩固。另一方面这个机械手可以实现一定的搬运功能具有很强的实用性能。 2、发展现状和趋势
工业机器人课程设计--多功能机械手-精品
《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,
工业机器人简介及发展前景
工业机器人简介及发展前景 工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。 工业机器人最显著的特点有以下几个: (1)可编程。生产自动化的进一步发展是柔性启动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。 (2)拟人化。工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。 (3)通用性。除了专门设计的专用的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性。比如,更换工业机器人手部末端操作器(手爪、工具等)便可执行不同的作业任务。 (4)工业机器技术涉及的学科相当广泛,归纳起来是机械学和微电子学的结合-机电一体化技术。第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是计算机技术的应用密切相关。因此,机器人技术的发展必将带动其他技术的发展,机器人技术的发展和应用水平也可以验证一个国家科学技术和工业技术的发展水平。 当今工业机器人技术正逐渐向着具有行走能力、具有多种感知能力、具有较强的对作业环境的自适应能力的方向发展。当前,对全球机器人技术的发展最有影响的国家是美国和日本。美国在工业机器人技术的综合研究水平上仍处于领先地位,而日本生产的工业机器人在数量、种类方面则居世界首位。 构造分类 工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。 工业机器人按臂部的运动形式分为四种。直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。 工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。 工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。 示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直
《工业机器人技术基础》教学大纲
《工业机器人技术基础》教学大纲 一、课程基本信息 课程名称:工业机器人技术基础 学时:48 适用对象: 工业机器人技术专业、电气自动化技术专业、机电一体化技术专 业 考核方式:考查 二、课程简介 机器人学是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。通过该课程的学习, 使得学生基本熟悉这门技术以及其发展状况,为今后从事工业机器人的操作管 理、维护维修、系统安装调试和集成设计的工作打下基础。 三、课程性质与教学目的 本课程是专业基础课,通过本课程的学习,使学生了解机器人及其应用,掌 握机器人系统组成、机构、运动分析、控制和使用的技术要点和基础理论。机器 人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、 控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有 一个全面、深入的认识。培养学生综合运用所学基础理论和专业知识分析问题解 决问题的能力。 第1章概述 机器人的基本概念,机器人的组成原理、机器人应用与外部的关系、机器人应用技术的现状 第2章机器人的基础知识 机器人的分类、机器人的基本术语与图形符号、机器人的技术参数、机器人的运动学基础、机器人的动力学基础 第3章机器人的机械结构系统 机器人的机械结构系统、机器人的腕部机构、机器人的手部机构、机器人的行走机构
第4章机器人的驱动系统 机器人的驱动系统概述、电动机及其特性、液压驱动系统及其特性 第5章机器人的控制系统 机器人的控制系统、伺服控制系统及其参数、交流伺服电动机的调速、机器人控制系统结构、机器人控制的示教再现、机器人控制系统举例 第6章机器人的感觉系统 机器人的传感技术、机器人的内部传感器、机器人的外部传感器、机器人的视觉系统、机器人传感器的选择 第7章机器人的语言系统 机器人的语言系统概述、常用的机器人语言简介、机器人的离线编程、机器人的编程示例 第8章工业机器人及其应用 工业机器人概述、焊接机器人、搬运机器人、喷涂机器人、装配机器人 四、各教学环节学时分配 教学环节 教学时数课程内容讲课实验 其他教学 环节 第一章概述 4 第二章机器人的基础知识 4 第三章机器人的机械结构系统 6 1 第四章机器人的驱动系统8 第五章机器人的控制系统8 第六章机器人的感觉系统8 1 第七章机器人的语言系统 6 第八章工业机器人及其应用12
工业机器人课程设计
河南机电高等专科学校 《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号:1534542251 姓名:流星 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,
机器人课程设计
沈阳工程学院 课程设计 设计题目:三自由度微型直角坐标工业机器人模型设计 系别自控系班级测本081 学生姓名步勇捷学号 2008310110 指导教师祝尚臻职称讲师 起止日期:2012年 1 月 2 日起——至 2012 年 1 月13 日止 - I -
沈阳工程学院 课程设计任务书 课程设计题目:三自由度直角坐标工业机器人设计 系别自动控制工程系班级 学生姓名学号 指导教师职称讲师 课程设计进行地点: F430 任务下达时间: 2011年 12月31日 起止日期:2012 年 1 月2日起——至 2012 年 1 月13日止教研室主任年月日批准 - II -
三自由度直角坐标工业机器人设计 1 设计主要内容及要求 1.1 设计目的: 1了解工业机器人技术的基本知识以及单片机、机械设计、传感器等相关技术。 2初步掌握工业机器人的运动学原理、传动机构、驱动系统及控制系统并应用于工业机器人的设计中。3通过学习,掌握工业机器人的驱动机构、控制技术,并使机器人能独立执行一定的任务。 1.2 基本要求 1要求设计一个微型的三自由度的直角坐标工业机器人; 2要求设计机器人的机械机构(示意图),传动机构、控制系统、及必需的内外部传感器的种类和数量布局。 3要有控制系统硬件设计电路。 1.3 发挥部分 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选; (2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 顺序阶段日期计划完成内容备注 1 2012.1. 2 讲解主要设计内容,布置任务打分 2 2012.1. 3 检查框图及初步原理图完成情况,讲解及纠正错误打分 3 2012.1. 4 检查机械结构设计并指出错误及纠正;打分 4 2012.1. 5 继续机械机构和传动机构设计打分 5 2012.1. 6 进行控制系统设计打分 6 2012.1.9 检查控制系统原理图设计草图打分 7 2012.1.10 完善并确定控制系统打分 8 2012.1.11 指导学生进行驱动机构的选择打分 9 2012.1.12 进行传感器的选择和软件流程设计打分 10 2012.1.13 检查任务完成情况并答辩打分 - III -
工业机器人背景介绍
郑州领航机器人有限公司 工业机器人的背景介绍 机器人是近代自动控制领域中出现的一项新技术,并成为现代机械制造中的一个重要组成部分。机器人显著地提高了劳动生产率,改善产品质量,对改善劳动条件和产品的快速更新换代起着十分重要的作用,加快实现工业生产机械化和自动化的步伐。尤其在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。因而受到各先进国家的重视,投入大量人力物力加以研究和应用。 工业机器人是机器人学的一个分支,它代表了机电一体化的最高成就。工业机器人,一般指的是在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。国际标准化组织(ISO)对工业机器人所下的定义是“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能借助于可编程序操作来处理各种材料、零件、工具和专用设备,以执行种种任务”。它综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表。随着科学技术的不断发展,人们对机器人的工作能力提出了更高的要求,不仅要求机器人的外形美观、操作简单,而且具有一定的稳定性、灵活性和开放性。
随着科学和技术的不断发展,在过去的几个世纪里,人类在许多方面都取得了重大的进展。机器人技术作为人类最伟大的发明之一,自2世纪60 年代初问世以来,经历了短短的50 年,已取得巨大的进步。工业机器人在经历了诞生、成长、成熟期后,已成为制造业中必不可少的核心装备,而且工业机器人不仅在工厂里成了工人必不可少的伙伴,而且正在以惊人的速度向航空航天、军事、服务、娱乐等人类生活的各个领域渗透。据世界机器人联合会统计,仅2014 年全球工业机器人销量就达到22.5万部,较上年增长27%,触及纪录最高点。预计2015 年增长率会更大。根据2012 年的统计,世界使用机器人最多的国家是日本,约31 万台;其次为美国、德国的16 万台和韩国的14 万台。 我国的工业机器人发展的历史已经有20 多年,从“七五”科技攻关开始,正式列入国家计划,在国家的组织和支持下,通过“七五”、“八五”科技攻关,不仅在机器人的基础理论和关键技术方面取得重大突破,而且在工业机器人整机方面,己经陆续掌握了喷漆、弧焊、点焊、装配和搬运等不同用途、典型的工业机器人整机技术,并成功的应用于生产,掌握了相关的应用工程知识。但总的看来,我国的工业机器人技术及其工程应用的水平和国外的相比还有一定的距离。我国目前拥有工业机器人为13 万台,位居世界第五。同发达国家相比,我国机器人密度仍然较低,因此机器人需求量很大,以目前25%的年增长率,我国工业机器人保有量有望在2018 年超越日本达到世界
工业机器人种类介绍
工业机器人种类介绍 关键词:机器人,种类介绍移动机器人 (AGV) 移动机器人(AGV)是工业机器人的一种类型,它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,它可广泛应用于机械、电子、纺织、卷烟、医疗、食品、造纸等行业的柔性搬运、传输等功能,也用于自动化立体仓库、柔性加工系统、柔性装配系统(以AGV作为活动装配平台);同时可在车站、机场、邮局的物品分捡中作为运输工具。 国际物流技术发展的新趋势之一,而移动机器人是其中的核心技术和设备,是用现代物流技术配合、支撑、改造、提升传统生产线,实现点对点自动存取的高架箱储、作业和搬运相结合,实现精细化、柔性化、信息化,缩短物流流程,降低物料损耗,减少占地面积,降低建设投资等的高新技术和装备。 点焊机器人 焊接机器人具有性能稳定、工作空间大、运动速度快和负荷能力强等 焊接机器人 特点,焊接质量明显优于人工焊接,大大提高了点焊作业的生产率。 点焊机器人主要用于汽车整车的焊接工作,生产过程由各大汽车主机厂负责完成。国际工业机器人企业凭借与各大汽车企业的长期合作关系,向各大型汽车生产企业提供各类点焊机器人单元产品并以焊接机器人与整车生产线配套形式进入中国,在该领域占据市场主导地位。 随着汽车工业的发展,焊接生产线要求焊钳一体化,重量越来越大,165公斤点焊机器人是当前汽车焊接中最常用的一种机器人。2008年9月,机器人研究所研制完成国内首台165公斤级点焊机器人,并成功应用于奇瑞汽车焊接车间。2009年9月,经过优化和性能提升的第二台机器人完成并顺利通过验收,该机器人整体技术指标已经达到国外同类机器人水平。 弧焊机器人 弧焊机器人主要应用于各类汽车零部件的焊接生产。在该领域,国际大 弧焊机器人 型工业机器人生产企业主要以向成套装备供应商提供单元产品为主。
管道机器人设计—课程设计
前言 (ⅰ) 目录 (ⅱ) 中文摘要 (ⅲ) 第一章概述 (1) 1.1机器人概述 (1) 1.2管道机器人概述 (3) 1.3国内外管道机器人的发展 (4) 1.3.1国内管道机器人的发展 (4) 1.3.2国外管道机器人的发展 (6) 1.4 机器人的发展景 (8) 第二章总体方案的制定与比较 (10) 2.1 管道机器人设计参数和技术指标 (10) 2.2总体结构的设计和较 (10) 第三章部件的设计和算 (15) 3.1 管道机器人工作量算 (15) 3.3 撑开机构和放大杆组的计 (24) 第四章其他 (32) 5.1 大小锥齿轮的设计和核 (32) 5.2 轴Ⅰ的设计和核 (35) 5.3 键的校核 (44)
在工农业生产及日常生活中,管道应用范围极为广泛。在管道的使用过程中,会产生管道堵塞与管道故障和损伤,需要定期维护、检修等。但管道所处的环境往往是人们不易达到或者不允许人们直接进入,所以开发管道机器人就显得尤为重要。 以金属冶炼厂管道清洁机器人为研究目标,根据其工作环境和技术要求设计了一种可适应φ700mm-φ1000mm管道的管道清洁机器人。该管道机器人采用三履带式的可伸缩行走装置,操作装置为2个自由的的操作臂,末端操作器上安装有吸尘头,吸尘头吸起的灰尘通过吸尘软管收集在装灰箱体内。当灰尘装满后,机器人行走到倒灰口,打开卸料门,将灰尘倒掉。本次设计主要对管道清洁机器人进行结构设计,利用三维参数化特征建模软件Pro/Engineer建立了管道清洁机器人的三维模型,生成了机器人主要零部件的工程图。对管道机器人中的主要机构进行动态仿真,验证了所设计机构的正确性。最后对主要零部件进行了设计校核计算,并简单叙述了该机器人控制方案。 第一章概述 1. 1 机器人概述 机器人----这一词最早使用始于1920年至1930年期间在捷克作家凯勒尔* 凯佩克(Karel capek)的名为"罗莎姆的万能机器人"的幻想剧中,
机器人介绍概要
机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。” 组成 机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。[1] 执行机构即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为 机器人高科技产物(19张) 关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。 驱动装置是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。 检测装置的作用是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。作为检测装置的传感器大致可以分为两类:一类是内部信息传感器,用于检测机器人各部分的内部状况,如各关节的位置、速度、加速度等,并将所测得的信息作为反馈信号送至控制器,形成闭环控制。另一类是外部信息传感器,用于获取有关机器人的作业对象及外界环境等方面的信息,以使机器人的动作能适应外界情况的变化,使之达到更高层次的自动化,甚至使机器人具有某种“感觉”,向智能化发展,例如视觉、声觉等外部传感器给出工作对象、工作环境的有关信息,利用这些信息构成一个大的反馈回路,从而将大大提高机器人的工作精度。 控制系统有两种方式。一种是集中式控制,即机器人的全部控制
机器人技术概要
机器人技术课程论文 题目日本机器人技术发展与我国 之现状
日本机器人技术发展与我国之现状 摘要:机器人技术是世界各国竞相争夺领先地位的高技术领域。本文介绍了享有机器人王国美誉的日本机器人技术发展状况以及日本政府支持机器人技术的战略举措。日本在产业机器人、仿人型机器人以及个人/家用机器人等领域具有显著的竞争优势。另外也简要介绍了我国机器人技术发展的现状及其趋势。 关键词:日本;机器人技术;战略;我国现状;趋势 机器人技术是具有前瞻性、战略性的高技术领域。国际电气电子工程师协会(IEEE)的科学家曾对未来科技发展方向进行预测,提出了四个重点发展方向,其中之一就是机器人技术。自从20世纪60年代机器人在美国诞生以来,世界主要发达国家竞相争夺这一领域的领先地位。日本发展机器人技术至少比美国晚五六年,但日本机器人技术发展极为迅速,后来甚至超过了美国,在这个重要性日益增强的领域夺得了全球领先地位,赢得了“机器人王国”的美誉。 近年来,日本的机器人市场规模不断攀升,目前已经超过5000亿日元。日本生产的机器人以产业用的机器人为主,其次是娱乐机器人,后者的市场规模达到70亿日元左右。根据日本经济产业省的预测,到2010年,日本机器人的市场将达到约1·8万亿日元,2025年达到约6·2万亿日元。[1]日本机器人技术一直保持而且将来预计会继续保持强劲的发展势头。 随着我国门户的逐渐开放,国内的工业机器人产业将面对越来越大的竞争与冲击,因此,掌握国内工业机器人市场的实际情况,把握我国工业机器人研究的相关进展,显得十分重要。 1日本机器人技术发展的历史和现状 日本在1967年由川崎重工业公司从美国Unimation公司引进了机器人和机器人技术,建立起生产车间,并于1968年试制出第一台川崎的“尤尼曼特”机器人。从那时起,日本有了自己的机器人技术,并开始向这个高技术领域的制高点进攻。 20世纪60年代可以说是日本机器人发展的摇篮期,那时日本的机器人技术刚刚起步,机器人价格昂贵,在工业上广泛应用还不现实。70年代,机器人技术进入实用期。从汽车制造业开始,机器人逐渐向传统产业渗透。到了80年代,日本机器
机器人学简介
简介: 课程介绍 涉及内容:机器人运动学、动力学、控制、运动规划、编程及涉及等。 Topics: robotics foundations in kinematics, dynamics, control, motion planning, trajectory generation, programming and design. 主讲人 (美)Oussama Khatib 斯坦福大学计算机系教授其研究工作主要集中在自行机器人、以人为中心的机器人系统、友善机器人设计、动态模拟和触觉交互。研究的重点在于标定上述系统复杂动态特性的理论和技术,提供系统动作和与环境交互的能力并满足实时的要求。研究领域覆盖得课题包括机器人的自行能力,具有触觉交互的与人的协同动作以对虚拟原形,动画特性或者手术器械的操作。 指导翻译导师介绍 李永刚博士后,副教授,2007年毕业于天津大学获博士学位,2009年从天津大学博士后流动站出站。现任天津职业技术师范大学现代机械设计研究所副所长、机械设计教研室主任。长期从事机器人机构学设计理论与方法的研究,先后参与或主持省部级及以上科研项目7项,在国内外学术期刊或会议发表论文20余篇。 视频截图 引用 冰冰字幕组特邀天津职业技术师范大学李永刚博士指导翻译.李老师与我们已尽了全力,但仍会有百密一疏请大家谅解,特此请广大网友,同学们一起讨论。 冰冰字幕组希望喜欢机械类的同学们加入翻译课程的行列,在翻译过程中一起学习进步,李永刚老师也会帮每位参与的翻译者答疑解惑。 冰冰字幕组翻译考核QQ群95763258 进群后请在明星片上标记开放课程 目录: Lecture 1 58 min* Topics: Course Overview, History of Robotics Video, Robotics Applications, Related Stanford Robotics Courses, Lecture and Reading Schedule, Manipulator Kinematics, Manipulator Dynamics, Manipulator Control, Manipulator Force Control, Advanced Topics 第一讲 58分钟 主题:课程概要,机器人历史的视频,机器人应用,相关的斯坦福机器人课程,讲座和阅读计划,机械臂运动学,机械臂动力学,机械臂控制,机械力臂控,前沿论题 Lecture 2 1 hr 8 min Topics: Spatial Descriptions, Generalized Coordinates, Operational Coordinates, Rotation Matrix, Example - Rotation Matrix, Translations, Example - Homogeneous Transform, Operators, General Operators
工业机器人课程设计
烟台南山学院 工业机器人课程设计 题目洁净机器人 指导教师魏春莉 院系机电工程学院 专业机械设计制造及其自动化 班级机电本科一班 学号200501020305 姓名程林志 2008年8月25日至2008年9月12日共3周
目录 一、摘要............................................................... 3错误!未定义书签。 二、机器人概述 .................................................. 4错误!未定义书签。 三、机器人发展史 (4) 四、机器人技术的新进展 (6) (一)、国外机器人的最新进展 (6) 1.工业机器人 (6) 2.先进机器人: (7) (二)、目前研究热点及发展趋势 (7) 五、洁净机器人设计概述(特别指出三维造型) (9) (一)、加湿器工作原理 (9) (二)、吸尘器工作原理 (10) (三)、机器人设计 (10) 1、整体设计 (10) 2、控制部分硬件设计 (16) 3、控制部分软件设计 (18) 4、概要设计 (20) 5、详细设计 (25) 6、电机PWM驱动 (29) 六、主要参考书目 (33)
一、摘要: 功业机器人在许多生产领域的使用实践证明,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。基于上述背景,在了解工业机器人(HP3)系统构成和在TVT-4000E柔性制造系统中应用的基础上,设计了工业机器人搬运货物的操作程序。利用示教编程器NX100对HP3型工业机器人进行控制。 Industrial robot production in many areas of the use of Practice has proved that not only can improve the quality of products and production, and the safety of persons, to improve the labor environment, reduce labor intensity, increasing labor productivity, saving raw material consumption and lower production costs, and it has a very important significance. Against the above background, in the understanding of the industrial robot (ABAS) and the system constitutes TVT - 4000E flexible manufacturing system based on the application , the design of industrial robots cargo handling procedures. Use for teaching programming NX100 right ABAS industrial robot control.