加速度传感器

ADXL203型双轴加速计及其在倾斜度测量中的应用
一、概述
美国模拟器件公司(简称ADI )凭借其独特的iMEMS(集成MEMS)工艺能使传感器单元和信号调理电路集成在一颗芯片上,不仅减小器件尺寸、降低功耗和节省成本,同时提高性能和定制生产能力。ADI 推出的ADXL203 是一种高精度、低功耗及单一的iMEMS 型IC 芯片双轴加速计,具有信号可调的电压输出。输出量为一个与加速度成比例的模拟电压信号,比例系数达到1000mV/g 。该加速计既可测量动态加速度,又可以用来实现诸如重力加速度的静态测量,此时可以替代倾斜角传感器进行倾斜测量。
本文在详细介绍了加速计ADXL203 的结构及原理,给出它与ADuC847组成的倾斜度测量实现电路,并对其进行了分析。该电路具有实现简单、精度高的特点。
二、 性能特点
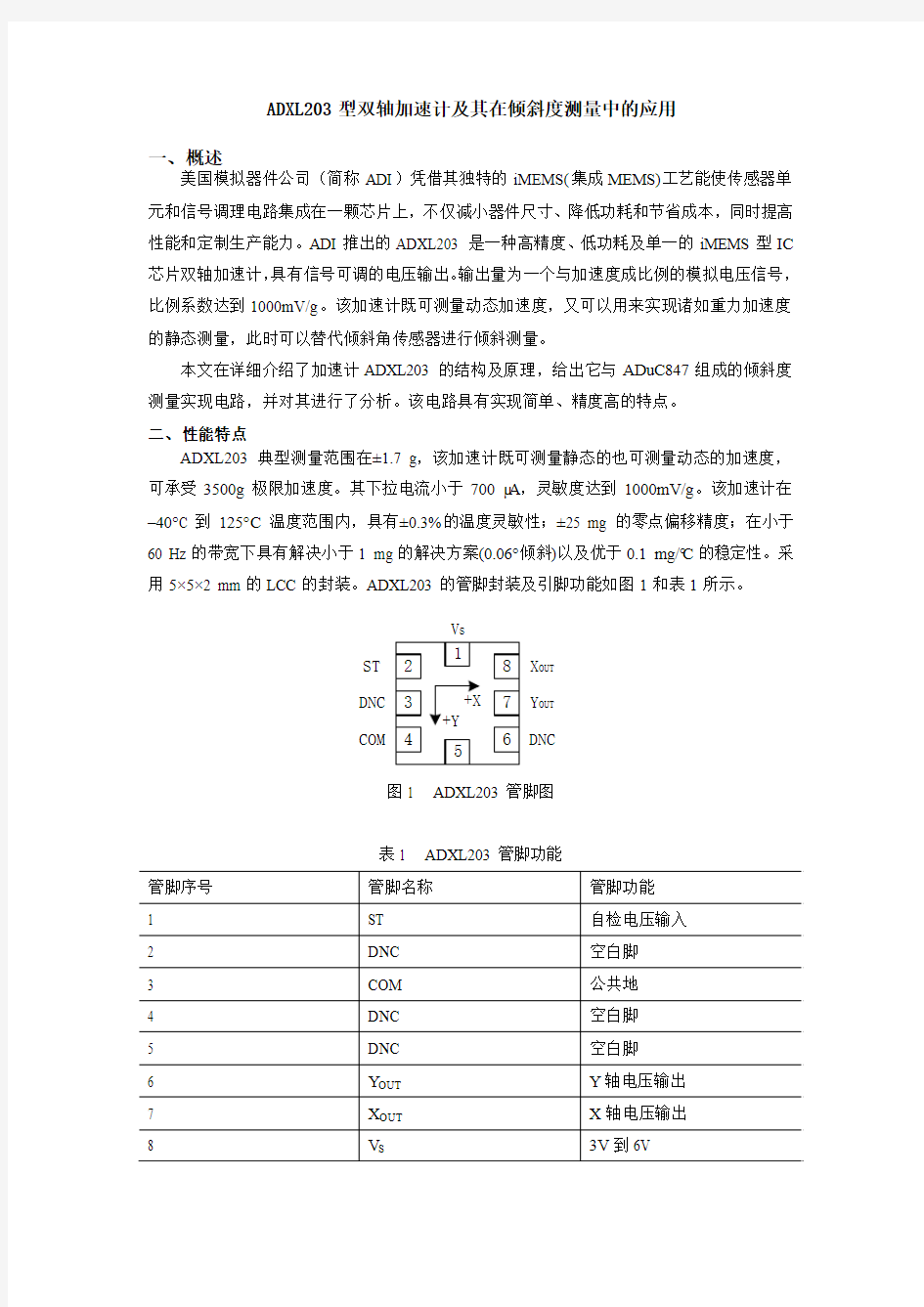
ADXL203典型测量范围在±1.7 g ,该加速计既可测量静态的也可测量动态的加速度,可承受3500g 极限加速度。其下拉电流小于700 μA ,灵敏度达到1000mV/g 。该加速计在–40°C 到125°C 温度范围内,具有±0.3%的温度灵敏性;±25 mg 的零点偏移精度;在小于60 Hz 的带宽下具有解决小于1 mg 的解决方案(0.06°倾斜)以及优于0.1 mg/°C 的稳定性。采用5×5×2 mm 的LCC 的封装。ADXL203的管脚封装及引脚功能如图1和表1所示。
V S
ST DNC COM
X OUT Y OUT DNC
图1 ADXL203管脚图
表1 ADXL203管脚功能
三、 工作原理
ADXL203内部电路框图如图2所示。传感器输出幅值与所测加速度成正比的方波信号,经过信号交流放大,相敏检波、低通滤波,得到与加速度成比例的电压信号。
图2 ADXL203内部电路框图
传感器主要是由一个利用表面微机械加工的多晶硅机构和一个差动电容器组成。多晶硅结构由多晶硅弹簧支撑,处于晶片的顶部,并与差动电容的运动的中心极板相连。分别在差动电容的固定的上下极板上加两路幅度相等、相位差为180?的方波。在加速度的作用下,多晶硅结构会产生偏移,拉动差动电容的中心极板滑动,使两个电容容值不同,便在中心极板产生电压,传感器输出方波。输出方波的幅值与测量的加速度成正比。
三、使用说明 1、电源退藕
一般情况下,为了滤出供电电源产生的噪声,只需在加速计的V S 和COM 脚间接一个0.1μF 的电容,即图2中的CCD 。但是,在有些情况下,特别是当内部时钟频率为140KHZ 时,供电电源产生的噪声就会对加速计的输出信号产生不可忽视的干扰。当需要格外加退藕装置的时候,可以在加速计的供电电路中串入一个100Ω(或更小)的电阻。另外,还可以在CCD 上并联一个大阻值的旁路电容,容值在1μF~22μF 之间选择。
2、带宽设置
ADXL203的带宽是通过X OUT 和Y OUT 脚连接的电容C X 、C Y 来设置的。X OUT 和Y OUT 脚必须连接电容以实现低通滤波,从而实现对信号的去锯齿和噪声削弱。-3dB 带宽的计算公式为:
()()()Y ,X 3dB C 32k 21F ?Ω=-π
或者,简化成,
()
Y ,X 3dB C F 5F μ=-
加速计ADXL203的内部电阻R FIL T 的标称值为32KΩ,而其实际阻值可在14KΩ~40KΩ间选择,加速计的带宽计算也就要相应的产生变化。表2给出R FILT 为32KΩ时滤波电容C X 、C Y 的容值选择与带宽的对应关系。应注意的是,任何情况下C X 、C Y 的容值都不能小于2000pF 。
表2 滤波电容C 、C 的容值选择
X Y 4ms
C 160t on +?=,
其中C 表示C X 或者C Y ,单位为μF 。选C X 、C Y 为0.1μF 时,开启时间为20ms 。 3、自检模式
ADXL203的ST 脚为自检电平输入端。当ST 脚接VS 时,加速计进入自检模式,此时会在传感器中心极板产生静电力,使其偏移。由加速计输出电压的值就可以判断出加速计功能是否正常。自检时,输出端的典型电压变化量为700mV (对应700mg 的加速度)。在非自检模式时,ST 脚可以开路或接COM 端。
ST 脚所接的电压大小不可超过V S +0.3V 。如果在电路设计时不能保证这一点(例多电压供电时),最好能在ST 和V S 脚间接入一个低正向电压VF 的箝位二极管。
4、噪声与带宽的权衡选择
ADXL203输出信号带宽决定了测量精度。可通过滤波减小噪声底密度,提高测量精度。其输出信号带宽的典型值为2.5KHZ 。对信号进行滤波,可以有效防止频率混叠。ADXL203允许根据实际需要改变X OUT 、Y OUT 脚处的滤波电容大小来设置输出信号的带宽。但要保证其输出信号带宽不能超过AD 转换采样频率大小的一半。当进一步减小信号带宽时,可以减小噪声,提高测量精度。
ADXL203的噪声属于高斯白噪声,即其功率谱密度在所有频率下为常数。噪声(rms )的计算公式为:
(
)(
)
6.1BW HZ /
g 110rmsNiose
??
=μ
例如,带宽为100HZ 时的噪声大小为:
(
)(
)
4mg .16.1100HZ g
110rmsNoise
=??
=μ
噪声与信号带宽的平方根成正比,使用时应根据需要尽量地减小带宽,以提高加速计测量精度,增大测量动态范围。
噪声峰-峰值的估算可参照表2。而表3给出的是C X、C Y的选择与噪声峰-峰值的对应关系。
表3 噪声峰-峰值估计参照表
表4 C、C值与噪声峰-峰值对照表
5、供电电压
ADXL203的性能都是在5V典型电压供电时测试和标定的。实际上,供电电压V S可以在3V~6V之间选择。选择不同的供电电压,加速计的一些性能指标自然就会随之改变。
ADXL203的输出电压与加速度是成比例的,当供电电压改变时,灵敏度就会发生相应改变,影响测量精度。例如,当V S=3V时,输出电压比例系数变为560mV/g。
0g对应输出电压也是与V S成比例的,其值为V S/2。
输出噪声虽然不与V S成比例,但其大小也受到很大影响。因为当增大供电电压时,输出电压比例系数就会增大,而噪声电压保持不变。所以,噪声密度随着供电电压的增大而减小。当V S=3V时,噪声密度为HZ
190μ。
g
自检模式的g值输出可以粗略地认为是与供电电压的平方成正比。而灵敏度系数又是与供电电压成比例的,所以自检模式时的电压输出就与供电电压的立方成正比。在V S=3V时,自检输出典型值约为150mV,对应的g值为270mg。
当供电电压减小时,供电电流随之减小。3V电压供电时的供电电流为450μA。
四、ADXL203在倾斜度测量中的应用
1、测量原理
ADXL203最常见的应用是进行倾斜度测量。加速计以重力矢量作为基准来测定物体的空间方位。当加速计的感应轴与重力方向垂直(即感应轴水平)时,它对倾斜度的变化是最敏感的,倾斜度每变化1?,输出g值变化17.5mg;当感应轴与水平成45?角时,倾斜度每变化1?,输出g值变化只有12.2mg;而当感应轴与重力方向接近平行时(所感应到的加速度接
近+g 或-g),倾斜度每变化1?,加速计输出几乎没有什么变化。随着测量倾斜角度的增大,测量精度下降。
图3 重力矢量关系图
将加速计的X 和Y 轴都水平放置,就可以作为双轴倾斜计测量倾斜度了。如图3所示。将输出模拟电压信号V X ,V Y 换算成对应的g 值变化量A X ,A Y ,
V/g)5V)/(1000m .2V (A X X -= V/g)5V)/(1000m .2V (A Y Y -=
代入下面公式计算得到X 、Y 轴的倾斜角度俯仰角(pitch )和倾斜角(roll )。
1g)/arcsin(A
pitch X
=
)1g /A (arcsin roll Y =
2、测量电路
ADXL203输出的是模拟电压信号,可直接进行AD 采样。这里选用ADI(Analog Devices Inc.)公司的单片机ADuC847,其内部集成了速度可达420kSPS 的24位Δ-ΣADC 。硬件连接图如图4所示。
图4 硬件连接图
ADXL203输出的X 、Y 轴的测量信号分别经低通滤波,然后通过差动输入方式输入到ADC ,其中VIN (-)端接2.5V 电压。而为了得到更高的精度,我们给ADC 外接2.5V 参考电压。另外,为了滤出供电电源产生的噪声,图中采用0.1u 和10u 电容并联接入供电电路进行电源退藕。 3、参数设置及分析
我们设计的系统要求倾斜测量分辨率达到0.06°,测量范围0°~±10°。那么加速计及ADC 的参数应该如何设置才能达到测量要求呢?下面对此进行分析。
对于加速计ADXL203,测量得到的g 与所测角度α的函数曲线是一段正弦曲线,如图5所示。
图5 g 值与α关系曲线
由于测量得到的g 与所测角度α为非线性关系,所以测量范围内,α变化0.06°对应的g 值变化量会随所测量角度大小的变化而变化。 当α在0°~10°范围内时,
()2
06.0sin
2
06
.022cos
0.06sin sin g -=?--=?ααα
当?=0α时, 1.05mg g =?,当?=10α时, 1.03mg g =?。 当α在0°~-10°范围内时,
()2
06.0sin
2
06
.022cos
sin 0.06sin g +=-?+=?ααα
当?-=10α时, 1.03mg g =?。可见,加速计在0g 位置时具有最高灵敏度,随着倾斜角度的增大,灵敏度降低。所以系统至少要分辨出1.03mg 的g 值变化,对应电压输出变化量为1.03mV 。
ADXL203的可选带宽为0.5HZ~2500HZ 。我们这里是为了对某时刻的倾斜角的进行测量,设置加速计1HZ 带宽即可以满足测量要求。此时加速计噪声均方值:
0.14mg 6.11HZ HZ /
g 110rmsNiose
=??
=μ
此时,滤波电容大小选为F 4.7μ。
相应的建立时间为:
756ms 4ms 4.7160t on =+?=μ
ADuC847内部集成的Δ-ΣADC 数据刷新率越低,越有利于提高分辨率。我们通过ADuC847内部SF 寄存器设置ADC 的数据刷新率为16.06HZ ,既得到相同条件下更好的分辨率,又保证不丢失任何测量信号信息。加速计的0g 输出电压为2.5V ,输出电压范围为2.3V~2.7V ,则相应选择ADC 输入电压范围320mV ±即可。这时ADC 达到17位无噪声码分辨率。于是:
005mV .02
/640mV LSB 17
==
量化噪声0025mV .0±。
传感器输出信号中的噪声,将对ADC 转换结果造成误差,影响精度。另一方面,AD 本身的有效输入噪声、量化噪声等都会影响ADC 转换精度。Δ-ΣADC 利用过采样原理,通过数字滤波和抽取,移去带外量化噪声并改善ADC 的分辨率,提高转换精度。 五、结论
ADXL203是晶体硅固体结构的加速计,它受温度的影响极小,保证了系统的稳定性。利用ADXL203进行倾斜测量精度高,功耗低。而它体积小,双轴输入,又能减化了电路的设计和安装。文中给出的电路实现简单,低功耗,达到很高的精度要求。 参考文献
[1]沙占友.集成传感器应用[M].北京:中国电力出版社,2005
[2]张海涛,阎贵平.MEMS 加速度传感器的原理及分析[J].电子工艺技术,2003.24(6) [3]汤琳宝,毛洋林,潘志浩.数字水平仪的设计与应用[J].微机算机信息,2004.8 [4]Precision ±1.7 g Single-/Dual-Axis iMEMS? Accelerometer [Z]. Analog Devices, Inc..
加速度传感器的选择
加速度传感器选型 压电加速度传感器因其频响宽、动态范围大、可靠性高、使用方便,受到广泛应用。在一般通用振动测量时,用户主要关心的技术指标为:灵敏度、频率范围,内部结构、内置电路型与纯压电型的区别,现场环境与后续仪器配置等。 一、灵敏度的选择 制造商在产品介绍或说明书中一般都给出传感器的灵敏度和参考量程范围,目的是让用户在选择不同灵敏度的加速度传感器时能方便地选出合适的产品,最小加速度测量值也称最小分辨率,考虑到后级放大电路噪声问题,应尽量远离最小可用值,以确保最佳信噪比。最大测量极限要考虑加速度传感器自身的非线性影响和后续仪器的最大输出电压。 估算方法:最大被测加速度×传感器电荷(电压)灵敏度,其数值是否超过配套仪器的最大输入电荷(电压)值。建议如已知被测加速度范围可在传感器指标中的“参考量程范围”中选择(兼顾频响、重量),同时,在频响、质量允许的情况下,尽量选择高灵敏度的传感器,以提高后续仪器输入信号,提高信噪比。在兼顾频响、质量的同时,可参照以下范围选择传感器灵敏度:以电荷输出型压电加速度传感器为例: 1、土木工程和超大型机械结构的振动在0.1g-10g (1g=9.81m/s2)左右,可选电荷灵敏度在300pC/ms-2~ 30pC/ms-2的压电加速度传感器,属于电荷输出型压电加速度传感器 2、特殊的土木结构(如桩基)和机械设备的振动在100ms-2~1000ms-2,可选择20pC/ms-2~2pC/ms-2的加速度传感器。 3、冲击,碰撞测量量程一般10000ms-2~1000000ms-2,可选则传感器灵敏度是0.2pC/ms-2~ 0.002pC/ms-2的加速度传感器。 二、频率选择 制造商给出的加速度传感器的频响曲线是用螺钉刚性连接安装的。 一般将曲线分成二段:谐振频率和使用频率。使用频率是按灵敏度偏差给出的,有±10%、±5%、±3dB。谐振频率一般是避开不用的,但也有特例,如轴承故障检测。选择加速度传感器的频率范围应高于被测试件的振动频率。有倍频分析要求的加速度传感器频率响应应更高。土木工程一般是低频振动,加速度传感器频率响应范围可选择0.2Hz~1kHz,机械设备一般是中频段,可根据设备转速、设备刚度等因素综合估算振动频率,选择0.5Hz~ 5kHz 的加速度传感器。如发电机转速在3000rms 时,除以60s 此时它的主频率为50Hz。碰撞、冲击测量高频居多。 加速度传感器的安装方式不同也会改变使用频响(对振动值影响不大)。 安装面要平整、光洁,安装选择应根据方便、安全的原则。我们给出同一只AD500S 加速度传感器不同安装方式的使用频率:螺钉刚性连接(±10%误差)10kHz;环氧胶或“502”粘接安装6kHz;磁力吸座安装 2kHz;双面胶安装1kHz。由此可见,安装方式的不同对测试频率的响应影响很大,应注意选择。加速度传感器的质量、灵敏度与使用频率成反比,灵敏度高,质量大,使用频率低,这也是选择的技巧。 三、内部结构 内部结构是指敏感材料晶体片感受振动的方式及安装形式。有压缩和剪切两大类,常见的有中心压缩、平面剪切、三角剪切、环型剪切。 中心压缩型频响高于剪切型,剪切型对环境适应性好于中心压缩型。如配用积分型电荷放大器测量速度、位移时,最好选用剪切型产品,这样所获得的信号波动小,稳定性好。 四、内置电路 内置的概念是将放大电路置于加速度传感器内,成为具有电压输出功能的传感元件。它可分双电源(四线)和单电源(二线、带偏置,又称ICP) 两种,下面所指内装电路专指ICP
加速度传感器主要参数
FEA-加速度传感器系列 FEA-XX-YZZ-M1和M2系列 测量范围:±0.5g,±1g,±2g,±3g,±6g,±18g,±50g。 测量轴数:单轴、双轴和三轴 供电电压:5V,12V,24V,9-32V(可选) 输出信号:0-5V,4-20mA,CANBUS,RS232,RS485,RS422,LED,LCD,开关量 分辨率:10-5-10-7g(根据测量范围和精度等级而定) 非线性:0.05%FS-1%FS(根据测量范围和精度等级而定) 温度漂移:0.1mg-0.5mg/ oC(根据测量范围和精度等级而定) 工作温度范围:-40oC -+80oC 防护等级:IP65-IP68(可选) 频率响应:0.5-20Hz(可选) 外壳:可选,见产品外壳与连接器,铝合金材料。 FEA-XX-YZZ-I1和I2系列 测量范围:±0.5g,±1g,±2g,±3g,±6g,±18g,±50g。 测量轴数:单轴、双轴和三轴 供电电压:5V,12V,24V,9-32V(可选) 输出信号:0-5V,4-20mA,CANBUS,RS232,RS485,RS422,LED,LCD,开关量 分辨率:10-3g-10-5g(根据测量范围和精度等级而定) 非线性:0.5%FS-2%FS(根据测量范围和精度等级而定) 温度漂移:0.5mg-3mg/ oC(根据测量范围和精度等级而定) 工作温度范围:-25oC -+80oC 防护等级:IP65-IP68(可选) 频率响应:0.5-20Hz(可选) 外壳:可选,见产品外壳与连接器,铝合金材料。 FEA-XX-YZZ-C1和C2系列 测量范围:±0.5g,±1g,±2g,±3g,±6g,±18g,±50g。 测量轴数:单轴、双轴和三轴 供电电压:5V,12V,24V,9-32V(可选) 输出信号:0-5V,4-20mA,CANBUS,RS232,RS485,RS422,LED,LCD,开关量 分辨率:10-2-10-4g(根据测量范围和精度等级而定) 非线性:1%FS-3%FS(根据测量范围和精度等级而定) 温度漂移:2 mg-5mg/ oC(根据测量范围和精度等级而定) 工作温度范围:-10oC -+60oC 防护等级:IP65-IP68(可选) 频率响应:0.5-20Hz(可选) 外壳:可选,见产品外壳与连接器,铝合金材料。 特别说明 产品性能、外壳以及连接器都可以根据客户的要求定制。 外壳及尺寸和连接器 加速度传感器所需要的外壳与连接器可参考《产品外壳与连接器》栏目进行选择,或者根据你的要求来定制。
加速度传感器测振动位移
加速度传感器测振动速度与位移方案 1. 测量方法(基本原理) 设加速度传感器测量振动所得的加速度为:()a t (单位:m/s 2) 对加速度积分一次可得速率: 1 1()()[ ]2N i i i a a v t a t dt t -=+==?∑? (单位:m/s) 对速率信号积分一次可得位移:1 1 ()()[ ]2 N i i i v v s t v t dt t -=+==?∑? (单位:m) 其中: ()a t 为连续时域加速度波形 ()v t 为连续时域速率波形 ()s t 为连续位移波形 i a 为i 时刻的加速度采样值 i v 为i 时刻的速率值 0a =0;0v =0 t ?为两次采样之间的时间差 2. 主要误差分析 误差主要存在以下几个方面: 1)零点漂移所带来的积分误差 由于加速度传感器的输出存在固定的零点漂移。即当加速度为0g 时传感器输出并不一定为0,而是一个非零输出error A 。传感器的输出值为:()a t +error A 。对error A 二次积分会产生积分累计效应。 2)积分的初始值所带来的积分误差 0a 和0v 的值并不为零,同样会产生积分累计效应。 3)高频噪声信号所带来的误差 高频噪声信号会对瞬时位移值测量精度带来影响,但积分值能相互抵销而不会带来累计。 3. 解决办法 1)零点漂移和积分初始值不为零可以加高通滤波器的方法滤除。
2)高频噪声信号的影响并不大,为了达到更高的精度,可以加一个低通滤波器。 选择高通滤波器和低通滤波器合理的截至频率,可以得到较理想的结果。 (注:高通滤波即去除直流分量;低通滤波即平滑滤波算法)。 4. 仿真研究 4.1 问题的前提背景 1.本课题研究的对象是桥梁振动的加速度()a t ,速度()v t 和位移()s t ,可以认为桥梁的加速度,速度,位移的总和为0。 即:0()0a t dt ∞ =? 0()0v t dt ∞ =? ()0s t dt ∞ =? 其离散表达式为:00()N i i a N ===∞∑ 0()N i i v N ===∞∑ 0()N i i s N ===∞∑ 2.加速度传感器测量值存在误差,它主要是在零点漂移和测量噪声两个方面。 即测量值()()()measure error a t a t a t =+ 其中:()measure a t 为加速度传感器测量加速度值 ()a t 为桥梁振动的实际加速度值 ()error a t 为传感器测量误差 3.振动速度与振动位移取决于振动加速度与振动频率,可以证明,振动速度与振动加速度成正比,与振动频率成反比;振动位移与振动速度成正比,与振动频率成反比。 4.2 仿真 1.取一组仿真用振动加速度信号:()9.8sin(240)3measure a t t π=??+,如图1所示。 其中:()measure a t 代表加速度传感器测量值
加速度传感器参数讲解(AD)
加速度传感器参数讲解(AD)Accelerometer Specifications - Quick Definitions Measurement range is the level of acceleration supported by the sensor’s output signal specifications, typically specified in ±g. This is the greatest amount of acceleration the part can measure and accurately represent as an output. For example, the output of a ±3g accelerometer is linear with acceleration up to ±3g. If it is accelerated at 4g, the output may rail. Note that the breaking point is specified by the Absolute Maximum Acceleration, NOT by the measurement range. A 4g acceleration will not break a ±3g accelerometer. Sensitivity is the ratio of change in acceleration (input) to change in the output signal. This defines the ideal, straight-line relationship between acceleration and output (Figure 1, gray line). Sensitivity is specified at a particular supply voltage and is typically expressed in units of mV/g for analog-output accelerometers, LSB/g, or mg/LSB for digital-output accelerometers. It is usually specified in a range (min, typ, max) or as a typical figure and % deviation. For analog-output sensors, sensitivity is ratiometric to supply voltage; doubling the supply, for example, doubles the sensitivity. Sensitivity change due to Temperature is generally specified as a % change per °C. Temperature effects are caused by a combination of mechanical stresses and circuit temperature coefficients.
基于加速度传感器的电机振动测量解读
基于加速度传感器的电机振动测量 摘要 电机是现代生产中的重要电气设备,从大型的工业电机到小型的家用电器,电机都是随处可见的,电机的故障会对生产造成重大影响,因此需要监测电机的运行状态。 为监测电机的运行状态,本文通过加速度传感器来测量电机振动的大小,并通过微控制器对电机加速度信号进行采集,并将它传输给电脑;利用电脑软件对采集的加速度信号进行频域积分得到速度信号,再与电机振动判断标准进行对比分析,从而判断电机运行状态, 确定修复时机,为电机提供检修依据。 关键词:加速度;振动测量;信号处理;故障分析
Measure the vibration of motor based on the acceleration sensor Abstract The electric motor is one sort of the most important electric equipments in modem manufacturing.From large industrial motors to small appliances, electric motors are everywhere. Its failure would produce a significant impact on the motor,therefore, we need to monitor the operating status of the motor. In this paper, in order to monitor the motor running, size of the motor vibration is measured by the acceleration sensor, and uses the microcontroller to collect the motor acceleration signal and transfer it to the computer. The acceleration frequency-domain signal is integrated into the speed signal in the computer, and then the speed signal is compared with the motor vibration criteria, to provide the basis for the maintenance of motor. We can determine the timing of repair. Keywords:Acceleration sensor, Vibration Measurement, Signal Processing, Failure Analysis
加速度传感器原理与应用简介
加速度传感器原理与应用简介 1、什么是加速度传感器 加速度传感器是一种能够测量加速力的电子设备。加速力就是当物体在加速过程中作用在物体上的力,就好比地球引力,也就是重力。加速力可以是个常量,比如g,也可以是变量。 加速度计有两种:一种是角加速度计,是由陀螺仪(角速度传感器)的改进的。另一种就是线加速度计。 2、加速度传感器一般用在哪里 通过测量由于重力引起的加速度,你可以计算出设备相对于水平面的倾斜角度。通过分析动态加速度,你可以分析出设备移动的方式。但是刚开始的时候,你会发现光测量倾角和加速度好像不是很有用。但是,现在工程师们已经想出了很多方法获得更多的有用的信息。 加速度传感器可以帮助你的机器人了解它现在身处的环境。是在爬山?还是在走下坡,摔倒了没有?或者对于飞行类的机器人来说,对于控制姿态也是至关重要的。更要确保的是,你的机器人没有带着炸弹自己前往人群密集处。一个好的程序员能够使用加速度传感器来回答所有上述问题。加速度传感器甚至可以用来分析发动机的振动。 目前最新IBM Thinkpad手提电脑里就内置了加速度传感器,能够动态的监测出笔记本在使用中的振动,并根据这些振动数据,系统会智能的选择关闭硬盘还是让其继续运行,这样可以最大程度的保护由于振动,比如颠簸的工作环境,或者不小心摔了电脑做造成的硬盘损害,最大程度的保护里面的数据。另外一个用处就是目前用的数码相机和摄像机里,也有加速度传感器,用来检测拍摄时候的手部的振动,并根据这些振动,自动调节相机的聚焦。 概括起来,加速度传感器可应用在控制,手柄振动和摇晃,仪器仪表,汽车制动启动检测,地震检测,报警系统,玩具,结构物、环境监视,工程测振、地质勘探、铁路、桥梁、大坝的振动测试与分析;鼠标,高层建筑结构动态特性和安全保卫振动侦察上。 3、加速度传感器是如何工作的 线加速度计的原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量)我们只需要测量F就可以了。怎么测量F?用电磁力去平衡这个力就可以了。就可以得到F 对应于电流的关系。只需要用实验去标定这个比例系数就行了。当然中间的信号传输、放大、滤波就是电路的事了。 现代科技要求加速度传感器廉价、性能优越、易于大批量生产。在诸如军工、空间系统、科学测量等领域,需要使用体积小、重量轻、性能稳定的加速度传感器。以传统加工方法制造的加速度传感器难以全面满足这些要求。于是应用新兴的微机械加工技术制作的微加速度传感器应运而生。这种传感器体积小、重量轻、功耗小、启动快、成本低、可靠性高、易于实现数字化和智能化。而且,由于微机械结构制作精确、重复性好、易于集成化、适于大批量生产,它的性能价格比很高。可以预见在不久的将来,它将在加速度传感器市场中占主导地位。 微加速度传感器有压阻式、压电式、电容式等形式。 ·压电式 压电式传感器是利用弹簧质量系统原理。敏感芯体质量受振动加速度作用后产生一个与加速度成正比的力,压电材料受此力作用后沿其表面形成与这一力成正比的电荷信号。压电式加速度传感器具有动态范围大、频率范围宽、坚固耐用、受外界干扰小以及压电材料受力自产生电荷信号不需要任何外界电源等特点,是被最为广泛使用的振动测量传感器。虽然压
MEMS加速度传感器的原理与构造
微系统设计与应用 加速度传感器的原理与构造 班级:2012机自实验班 指导教师:xxx 小组成员:xxx xx大学机械工程学院 二OO五年十一月
摘要 随着硅微机械加工技术(MEMS)的迅猛发展,各种基于MEMS技术的器件也应运而生,目前已经得到广泛应用的就有压力传感器、加速度传感器、光开关等等,它们有着体积小、质量轻、成本低、功耗低、可靠性高等特点,而且因为其加工工艺一定程度上与传统的集成电路工艺兼容,易于实现数字化、智能化以及批量生产,因而从问世起就引起了广泛关注,并且在汽车、医药、导航和控制、生化分析、工业检测等方面得到了较为迅速的应用。其中加速度传感器就是广泛应用的例子之一。加速度传感器的原理随其应用而不同,有压阻式,电容式,压电式,谐振式等。本文着手于不同加速度传感器的原理、制作工艺及应用展开,能够使之更加全面了解加速度传感器。 关键词:加速度传感器,压阻式,电容式,原理,构造
目录 1 压阻式加速度传感器 (2) 1.1 压阻式加速度传感器的组成 (2) 1.2 压阻式加速度传感器的原理 (2) 1.2.1 敏感原理 (3) 1.2.2 压阻系数 (4) 1.2.3 悬臂梁分析 (5) 1.3 MEMS压阻式加速度传感器制造工艺 (6) 1.3.1结构部分 (6) 1.3.2 硅帽部分 (8) 1.3.3键合、划片 (9) 2电容式加速度传感器 (9) 2.1电容式加速度传感器原理 (9) 2.1.1 电容器加速度传感器力学模型 (9) 2.1.2电容式加速度传感器数学模型 (11) 2.2电容式加速度传感器的构造 (12) 2.2.1机械结构布局的选择与设计 (12) 2.3.2材料的选择 (14) 2.3.3工艺的选择 (15) 2.3.4具体构造及加工工艺 (16) 3 其他加速度传感器 (18) 3.1 光波导加速度计 (18) 3.2微谐振式加速度计 (18) 3.3热对流加速度计 (19) 3.4压电式加速度计 (19) 4 加速度传感器的应用 (20) 4.1原理 (20) 4.2 功能 (20) 参考文献 (22)
压电式传感器测量加速度
压 电 式 加 速 度 测 试 系 统 姓名:张书峰 学号:201003140125 学院:机电学院 班级:机自101 指导教师:王玮
一设计概论 压电传感器是一种可逆性传感器,既可以将机械能转换为电能,又可以将机械能转换为电能。它是利用某些物质(如石英、钛酸钡或压电陶瓷、高分子材料等)的压电效应来工作的。在外力作用下,在电介质表面产生电荷,从而实现非电量测量的目的。因此是一种典型的自发电式传感器。压电传感器是力敏感元件,它可以测量最终能变换为力的那些非电物理量,例如,动态力、动态压力、振动加速度等 现有测试系统的各个组成部分常常以信息流的过程来划分。一般可以分为:信息的获得,信息的转换,信息的显示、信息的处理。作为一个完整的非电量电测系统,也包括了信息的获得、转换、显示和处理等几个部分。因为它首先要获得被测量的信息,把它变换成电量,然后通过信息的转换,把获得的信息变换、放大,再用指示仪或记录仪将信息显示出来,有的还需要把信息加以处理。因此非电量电测系统,具体来说,一般包括传感器(信息的获得)、测量电路(信息的转换)、放大器、指示器、记录仪(信息的显示)等几部分有时还有数据处理仪器(信息的处理)。它们间的 关系可 用右框 图来表 示。 其中传感器是一个把被测的非电物理变换成电量的装置,因此是一种获得信息的手段,它在非电量电测系统中占有重要的位 置。它获得信息 的正确与否,直 接影响到整个 测量系统的测 量效果。测量电 路的作用是把 传感器的输出
变量变成易于处理的电压或电流信号,使信号能在指示仪上显示或在记录仪中记录。测量电路的种类由传感器的类型而定。压电加速度传感器常用的测量电路是电荷放大器。常用的压电加速度传感器的动态测量系统如图1.2 二整体设计方案 1、测量的示意图 2、设计的原理 压电式加速度传感器属于惯性式传感器,工作原理是以某些物质的压电效应为基础,在加速度计受振时,加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比,可以把被测的非电物理量加速度转化为电量。由于压电式传感器的输出电信号是微弱的电荷,而且传感器本身有很大内阻,故输出能量甚微,这给后接电路带来一定困难。为此,通常器信号选用电荷放大器作为电信号的测量电路。 3、方框图
加速度传感器测量信号失真的原因及处理方法
如果加速度传感器大测量信号失真我们从两个大的方面分析:信号输出变小和偏置电压不稳定。其实想偏置电压不稳定这种情况,我们可以直接能判断的是输出信号与高频谐次波叠加,遇到这种情况一般是由加速度传感器的谐振频率造成,我们可以选择谐振频率较高的传感器。 而信号输出变小这种情况我们需要从四个方面去考虑:首先是由于供电电压降低而造成测量量程范围减小,这种表示需要更换电池或更正供电电压。其次是因环境温度与室温不同而导致的偏置电压超出规定的范围,当然这种我们需要采用偏置电压稳定的传感器。再者还有由加速度传感器的非线性造成,我们就需要采用量程大的传感器。最后一种情况就是在长距离信号输送时,恒流电压源的恒电流不够大,这种情况我们需要根据信号频率幅值选择正确的电压源恒电流。以上就是加速度传感器大测量信号失真的几种大的故障分析以及解决办法。 而加速度传感器小测量信号失真,我们需要从三个方面去考虑:信号忽大忽小不稳定,外界环境噪声对测量信号的影响以及测量系统噪声对测量信号的影响。关于信号忽大忽小不稳定一般是由瞬态温度变化以至偏置电压忽大忽小而造成输出信号不稳定,当然这种情况我们还是采用偏置电压稳定的传感器来解决。 接下来我们分析的是测量系统噪声对测量信号的影响:这种我们按照四种情况分析,一是加速度传感器自身的电噪声,我们需要检定传感器噪声,选择信噪比合适的传感器。二是电缆引起的电噪声,往往发生在与电荷输出型传感器配用的低噪声电缆,我们是换用好的低噪声屏蔽电缆。三是传感器供电电源噪声,这种我们肯定是要选用低噪声供电电源或采用电池供电。四是数采系统的量程设置,当然我们需要选择合适的量程才行。 最后我们分析的是外界环境噪声对测量信号的影响:这个又分为接地回路造成的噪声,避免多点接地,传感器采用对地绝缘。电磁波的影响,采用双层屏蔽壳的传感器。强声场的影响,采用双层屏蔽壳的传感器将有助于降低强声场对加速度传感器的影响。瞬态环境温度变化,对用于超低频测量的高灵敏度传感器必须采用隔热护套。和被测点的基座应变影响,我们需要选用基座应变小的剪切型加速度传感器,尽量减小传感器与被测物体间的接触面积。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城https://www.360docs.net/doc/c46883198.html,/
加速度传感器i4迷你型iBeacon加速度传感器
产品规格书 PRODUCT SPECIFICATION 深圳云里物里科技股份有限公司 Version 2.2发布时间 2017-08-04 MODEL NO/DESCRIPTION 产品名称:迷你型加速度传感器iBeacon 产品型号:i4
目录 1.产品简介 (3) 2.产品特点 (4) 3.运用范围 (4) 4.产品物理特性 (4) 5.技术参数 (5) 6.电气特性 (5) 7.LIS2DHTR传感器性能参数 (5) 8.默认参数 (6) 9.支持设备 (6) 10.操作说明 (7) 11.认证信息 (7) 12.包装信息 (7) 13.质量保障 (8)
i4迷你型加速度传感器iBeacon为信号白,能够配合各种装修风格;本产品的极限距离可达80米,能够降低部署成本;采用CR2477电池(1000mAH),支持微信摇一摇接入。中间可丝印或滴胶logo。 立面侧面 内部结构
外形小巧 采用CR2477电池(1000mAH) 支持微信摇一摇接入 增加超低功耗、高性能、3轴线性加速度传感器(LIS2DHTR) 内置温度传感器 传感器可选择的G值范围:±2g、±4g、±8g、±16g 加速度传感器的输出数据频率:1Hz-5.3kHz 传感器具有“睡眠唤醒”与“重返睡眠”功能 并有两个独立的可编程中断入口可用于监测自由跌落以及姿态检测 3.运用范围 传感器ibeacon可配合手机APP显示方向、运动激活、运动记步、移动监测、摇摆控制等;线下顾客广告、优惠券推送,精准营销;商场、机场等大型公众场合室内定位;旅游景点、博物馆等线上讲解;展会、论坛、办公室签到;网址:https://www.360docs.net/doc/c46883198.html,基于位置的实时消息推送,如现场资料、会议流程分享等;演唱会、大型赛事等观众互动。 4.产品物理特性 型号I4 外壳材质PC 外壳颜色信号白 外型尺寸?37x16.5mm 产品重量21g(含电池) 使用电源CR2477 供电电压 3.0VDC 安装方式双面胶粘贴
TR系列振动加速度传感器的说明
加速度传感器,通常需要在标准振动台上进行标定,给使用带来很多不便。TR系列固态加速度传感器采用先进的微电子加工技术和电容式测量原理,可获得优良的低频响应,用重力加速度g、通过改变传感器的放量方向就可对传感器进行校准。 振动和冲击 TR系列振动加速度传感器可以测量从直流到其截止频率范围内的振动量,以后的信号处理包括快速傅立叶变换,一次积分成速度,以及再积分成位移输出。例如测量壳体振动,输出量经过精确的滤波器及相应的积分器,再经有效值检波后可输出机壳的振动加速度、速度及位移,从而监测机组的运行状态。 倾斜角测量 当传感器倾斜放置时,传感器的输出为重力加速度在传感器测量轴上的分量,即输出与倾斜角存在反正弦的函数关系。当倾斜角较小时,近似为线性关系。 惯性测量 六自由度的惯性测量系统需要三个加速度传感器分别测量三个轴的加速度,三个陀螺仪测量三个轴的旋转。加速度经积分可获得速度,再次积分可获得位移或距离,此时加速度传感器的可重复性误差和温漂需要精确补偿,否则可能带来较大误差。
性能指标: 量程:±1g~±50g 分辨率:(5mg)0.1% 可承受最大冲击:1000g(6105) 非线性:0.2% 噪声:5000μg(Hz)2/1 (6105) 频响:6105最大到4kHz,6150最大到10kHz 工作温度:0℃~70℃ 重量:100g 形体尺寸:Φ32×6 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城。https://www.360docs.net/doc/c46883198.html,/
常用加速度传感器有哪几种分类
1、常用加速度传感器有哪几种分类各有什么特点 答:加速度传感器按工作原理可分为压电式、压阻式和电容式。 压电式传感器是通过利用某些特殊的敏感芯体受振动加速度作用后会产生与之成正比的电荷信号的特性,来实现振动加速度的测量的,这种传感器一般都具有测量频率范围宽、量程大、体积小、重量轻、结构简单坚固、受外界干扰小以及产生电荷信号不需要任何外界电源等优点,它最大的缺点是不能测量零频率信号。 压阻式传感器的敏感芯体为半导体材料制成电阻测量电桥来实现测量加速度信号,这种传感器的频率测量范围和量程也很大,体积小重量轻,但是缺点也很明显,就是受温度影响较大,一般都需要进行温度补偿。 电容式传感器中一般有个可运动质量块与一个固定电极组成一个电容,当受加速度作用时,质量块与固定电极之间的间隙会发生变化,从而使电容值发生变化。它的优点很突出,灵敏度高、零频响应、受环境(尤其是温度)影响小等,缺点也同样突出,主要是输入输出非线形对应、量程很有限以及本身是高阻抗信号源,需后继电路给予改善。 相比之下,压电式传感器应用更为广泛一些,压阻式也有一定程度的应用,而电容式主要专用于低频测量。 2、压电式传感器又分哪几种 答:压电式传感器有多种分类方式。 按敏感芯体材料分为压电晶体(一般为石英)和压电陶瓷两类。压电陶瓷比压电晶体的压电系数要高,而且各项机电系数随温度时间等外界条件的变化相对较小,因此一般更常用的是压电陶瓷。 按敏感芯体结构形式分为压缩式、剪切式和弯曲变形梁式。压缩式结构最简单,价格便宜,但是不能有效排除各种干扰;剪切式受干扰影响最小,目前最为常用,但是制造工艺要求较高,所以价格偏高;弯曲变形梁式比较少见,其结构能够产生较大的电荷输出信号,但是测量频率范围较低,受温度影响易产生漂移,因此不推荐使用。 按信号输出的方式分为电荷输出式和低阻抗电压输出式(ICP)。电荷输出式直接输出高阻抗电荷信号,必须通过二次仪表转换成低阻抗电压读取,而高阻抗电荷信号较容易受干扰,所以对测试环境、连接线缆等的要求较高; 而ICP型传感器内部安装了前置放大器,直接转换成电压信号输出,所以相对有信号质量好、噪声小、抗干扰能力强、能实现远距离测量等优点,目前正逐步取代电荷输出式传感器。 3、选择压电式加速度传感器时有哪些基本原则 答:选择一般应用场合的压电式加速度传感器时,要从三个方面全面考虑: ①振动量值的大小②信号频率范围③测试现场环境。 作为一般的原则,灵敏度高的传感器量程范围小,反之灵敏度低的量程范围大,而且一般情况下,灵敏度越高,敏感芯体的质量块越大,其谐振频率也越低,如果谐振波叠加在被测信号上,会造成失真输出,因此选择时除
工程压电式加速度传感器的功能特点
工程振动量值的物理参数常用位移、速度和加速度来表示。由于一般情况下频率范围内振动位移幅值量很小,且位移、速度和加速度之间都可互相转换,所以在实际使用中振动量的大小一般用加速度的值来度量。要想得到加速度的值需要用到测量的仪器是加速度传感器,使用过加速度传感器的人们知道,一般加速度传感器都是用恒流源供电,传感器输出的信号通常也就是电压信号,除了部分传感器有过处理,输出信号有常规的标准电流电压信号。加速度传感器正弦波输出的形式早已是最常见的。 对某一振动信号的测量,实际上是对组成该振动信号的正弦频率分量的测量。对加速度传感器主要性能指标的考核也是根据传感器在其规定的频率范围内测量幅值精度的高低来评定。压电式加速度传感器因为具有测量频率范围宽、量程大、体积小、重量轻、对被测件的影响小以及安装使用方便,所以成为最常用的振动测量传感器。 最常见的压电式加速度传感器是利用弹簧质量系统原理。敏感芯体质量受振动加速度作用后产生一个与加速度成正比的力,压电材料受此力作用后沿其表面形成与这一力成正比的电荷信号。压电式加速度传感器具有动态范围大、频率范围宽、坚固耐用、受外界干扰小以及压电材料受力自产生电荷信号不需要任何外界电源等特点,是被最为广泛使用的振动测量传感器。 IEPE型压电加速度计即通常所称的ICP型压电加速度传感器。压电传感器换能器输出的电荷通过装在传感器内部的前置放大器转换成低阻抗的电压输出。IEPE型传感器通常为二线输出形式,即采用恒电流电压源供电。直流供电和信号使用同一根线,通常直流电部分在恒电流电源的输出端通过高通滤波器滤去。IEPE型加速度传感器的最大优点是测量信号质量好、噪声小、抗外界干扰能力强和远距离测量,特别是新型的数采系统很多已配备恒流电压源,因此,IEPE 传感器能与数采系统直接相连而不需要任何其它二次仪表。加速度传感器的性能逐渐变得便捷使用,而且将会越来越受工程振动测量的最佳帮手。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城https://www.360docs.net/doc/c46883198.html,/
利用加速度传感器测量物体的倾斜角度
利用加速度传感器测量物体的倾斜角度 1 说明测量物体的倾斜角度是加速器传感器的一种常见的应用。虽然其基本原理十分简单,但是在具体实现中仍然会遇到很多困难,比如倾斜角度的精度问题,数学计算过于复杂等等。本文将对精度问题进行详细讨论,并给出一种简化的计算方法。 2 基本原理由于加速度传感器在静止放置时受到重力作用,因此会有1g 的重力加速度。利用这个性质,通过测量重力加速度在加速度传感器的X 轴和Y 轴上的分量,可以计算出其在垂直平面上的倾斜角度。这样,根据以上原理一个2 轴加速度传感器可以测量在X-Y 平面上的倾斜角度。需要注意的是,2 轴加速度传感器只能测量X 轴和Y 轴上的重力分量,因而只能测量因而只能测量X-Y平面上的倾斜角度。可是由于物体在空间倾斜的时候,很难保证倾斜完全在X-Y 平面上,这样只使用2 轴加速度传感器进行测量会存在局限性,因此,我们考虑使用 3 轴加速度传感器。如下图所示,3 轴加速度传感器可以测量X 轴、Y 轴和Z 轴的重力分量,计算空间倾斜角度的公式可以推广为 。这个公式就是本文中用来测量物体倾斜角度的基本原理。
需要说明的是,这里利用的是物体在静止时受到重力的性质,如果物体同时也有运动加速度的话,那么这个公式将不再准确。所以必须为公式增加一个限制条件,即3 硬件实现目前,在消费类产品中使用的加速度传感器分为数字输出(例如ADXL345)和模拟输出(例如ADXL335)两种。数字输出的加速度传感器可以直接通过I2C 或SPI 总线与MCU 进行连接;模拟输出的加速度传感器则需要使用ADC 进行采样。现在,普遍使用的MCU 中基本都有内置的ADC 通道,所以无论是数字输出还是模拟输出的加速度传感器都可以非常容易地和MCU 进行连接,进而实现测量功能。
加速度传感器
加速度传感器 一、简介 加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。 二、分类 压电式 压电式加速度传感器又称压电加速度计。它也属于惯性式传感器。压电式加速度传感器的原理是利用压电陶瓷或石英晶体的压电效应,在加速度计受振时,质量块加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比。 压阻式 基于世界领先的MEMS硅微加工技术,压阻式加速度传感器具有体积小、低功耗等特点,易于集成在各种模拟和数字电路中,广泛应用于汽车碰撞实验、测试仪器、设备振动监测等领域。 电容式 电容式加速度传感器是基于电容原理的极距变化型的电容传感器。电容式加速度传感器/电容式加速度计是对比较通用的加速度传感器。在某些领域无可替代,如安全气囊,手机移动设备等。电容式加速度传感器/电容式加速度计采用了微机电系统(MEMS)工艺,在大量生产时变得经济,从而保证了较低的成本。 伺服式 伺服式加速度传感器是一种闭环测试系统,具有动态性能好、动态范围大和线性度好等特点。其工作原理,传感器的振动系统由"m-k”系统组成,与一般加速度计相同,但质量m上还接着一个电磁线圈,当基座上有加速度输入时,质量块偏离平衡位置,该位移大小
由位移传感器检测出来,经伺服放大器放大后转换为电流输出,该电流流过电磁线圈,在永久磁铁的磁场中产生电磁恢复力,力图使质量块保持在仪表壳体中原来的平衡位置上,所以伺服加速度传感器在闭环状态下工作。由于有反馈作用,增强了抗干扰的能力,提高测量精度,扩大了测量范围,伺服加速度测量技术广泛地应用于惯性导航和惯性制导系统中,在高精度的振动测量和标定中也有应用。 三、应用 1、汽车安全 加速度传感器主要用于汽车安全气囊、防抱死系统、牵引控制系统等安全性能方面。 在安全应用中,加速度计的快速反应非常重要。安全气囊应在什么时候弹出要迅速确定,所以加速度计必须在瞬间做出反应。通过采用可迅速达到稳定状态而不是振动不止的传感器设计可以缩短器件的反应时间。其中,压阻式加速度传感器由于在汽车工业中的广泛应用而发展最快。 2、游戏控制 加速度传感器可以检测上下左右的倾角的变化,因此通过前后倾斜手持设备来实现对游戏中物体的前后左右的方向控制,就变得很简单。 3、图像自动翻转 用加速度传感器检测手持设备的旋转动作及方向,实现所要显示图像的转正。 4、电子指南针倾斜校正 磁传感器是通过测量磁通量的大小来确定方向的。当磁传感器发生倾斜时,通过磁传感器的地磁通量将发生变化,从而使方向指向产生误差。因此,如果不带倾斜校正的电子指南针,需要用户水平放置。而利用加速度传感器可以测量倾角的这一原理,可以对电子指南针的倾斜进行补偿。 5、GPS导航系统死角的补偿 GPS系统是通过接收三颗呈120度分布的卫星信号来最终确定物体的方位的。在一些特殊的场合和地貌,如遂道、高楼林立、丛林地带,GPS信号会变弱甚至完全失去,这也就是所谓的死角。而通过加装加速度传感器及以前我们所通用的惯性导航,便可以进行系统
加速度传感器原理以及选用
加速度传感器原理以及选用 什么是加速度传感器? 加速度传感器是一种能够测量加速力的电子设备。加速力就是当物体在加速过程中作用在物体上的力,就好比地球引力,也就是重力。加速力可以是个常量,比如g,也可以是变量。 加速度传感器一般用在哪里? 通过测量由于重力引起的加速度,你可以计算出设备相对于水平面的倾斜角度。通过分析动态加速度,你可以分析出设备移动的方式。但是刚开始的时候,你会发现光测量倾角和加速度好像不是很有用。但是,现在工程师们已经想出了很多方法获得更多的有用的信息。 加速度传感器可以帮助你的机器人了解它现在身处的环境。是在爬山?还是在走下坡,摔倒了没有?或者对于飞行类的机器人来说,对于控制姿态也是至关重要的。更要确保的是,你的机器人没有带着炸弹自己前往人群密集处。一个好的程序员能够使用加速度传感器来回答所有上述问题。加速度传感器甚至可以用来分析发动机的振动。 目前最新IBM Thinkpad手提电脑里就内置了加速度传感器,能够动态的监测出笔记本在使用中的振动,并根据这些振动数据,系统会智能的选择关闭硬盘还是让其继续运行,这样可以最大程度的保护由于振动,比如颠簸的工作环境,或者不小心摔了电脑做造成的硬盘损害,最大程度的保护里面的数据。另外一个用处就是目前用的数码相机和摄像机里,也有加速度传感器,用来检测拍摄时候的手部的振动,并根据这些振动,自动调节相机的聚焦。 加速度传感器是如何工作的? 多数加速度传感器是根据压电效应的原理来工作的。 所谓的压电效应就是 "对于不存在对称中心的异极晶体加在晶体上的外力除了使晶体发生形变以外,还将改变晶体的极化状态,在晶体内部建立电场,这种由于机械力作用使介质发生极化的现象称为正压电效应 "。 一般加速度传感器就是利用了其内部的由于加速度造成的晶体变形这个特性。由于这个变形会产生电压,只要计算出产生电压和所施加的加速度之间的关系,就可以将加速度转化成电压输出。当然,还有很多其它方法来制作加速度传感器,比如电容效应,热气泡效应,光效应,但是其最基本的原理都是由于加速度产生某个介质产生变形,通过测量其变形量并用相关电路转化成电压输出。 在选购加速度传感器的时候,需要考虑什么? 模拟输出 vs 数字输出:这个是最先需要考虑的。这个取决于你系统中和加速度传感器之间的接口。一般模拟输出的电压和加速度是成比例的,比如2.5V对应0g的加速度,2.6V对应于0.5g的加速度。数字输出一般使用脉宽调制(PWM)信号。 如果你使用的微控制器只有数字输入,比如BASIC Stamp,那你就只能选择数字输出的加速度传感器了,但是问题是你必须占用额外的一个时钟单元用来处理PWM信号,同时对处理器也是一个不小的负担。 如果你使用的微控制器有模拟输入口,比如PIC/AVR/OOPIC,你可以非常简单的使用模拟接口的加速度传感器,所需要的就是在程序里加入一句类似"acceleration=read_adc()"的指令,而且处理此指令的速度只要几微秒。 测量轴数量: 对于多数项目来说,两轴的加速度传感器已经能满足多数应用了。对于某些特殊的应用,比如UAV,ROV控制,三轴的加速度传感器可能会适合一点。 最大测量值: 如果你只要测量机器人相对于地面的倾角,那一个±1.5g加速度传感器就足够了。