有限元分析题及大作业题答案
有限元分析及应用作业报告
有限元分析及应用作业报告
一、问题描述
图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较:
1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算;
2)分别采用不同数量的三节点常应变单元计算;
3)当选常应变三角单元时,分别采用不同划分方案计算。
二、几何建模与分析
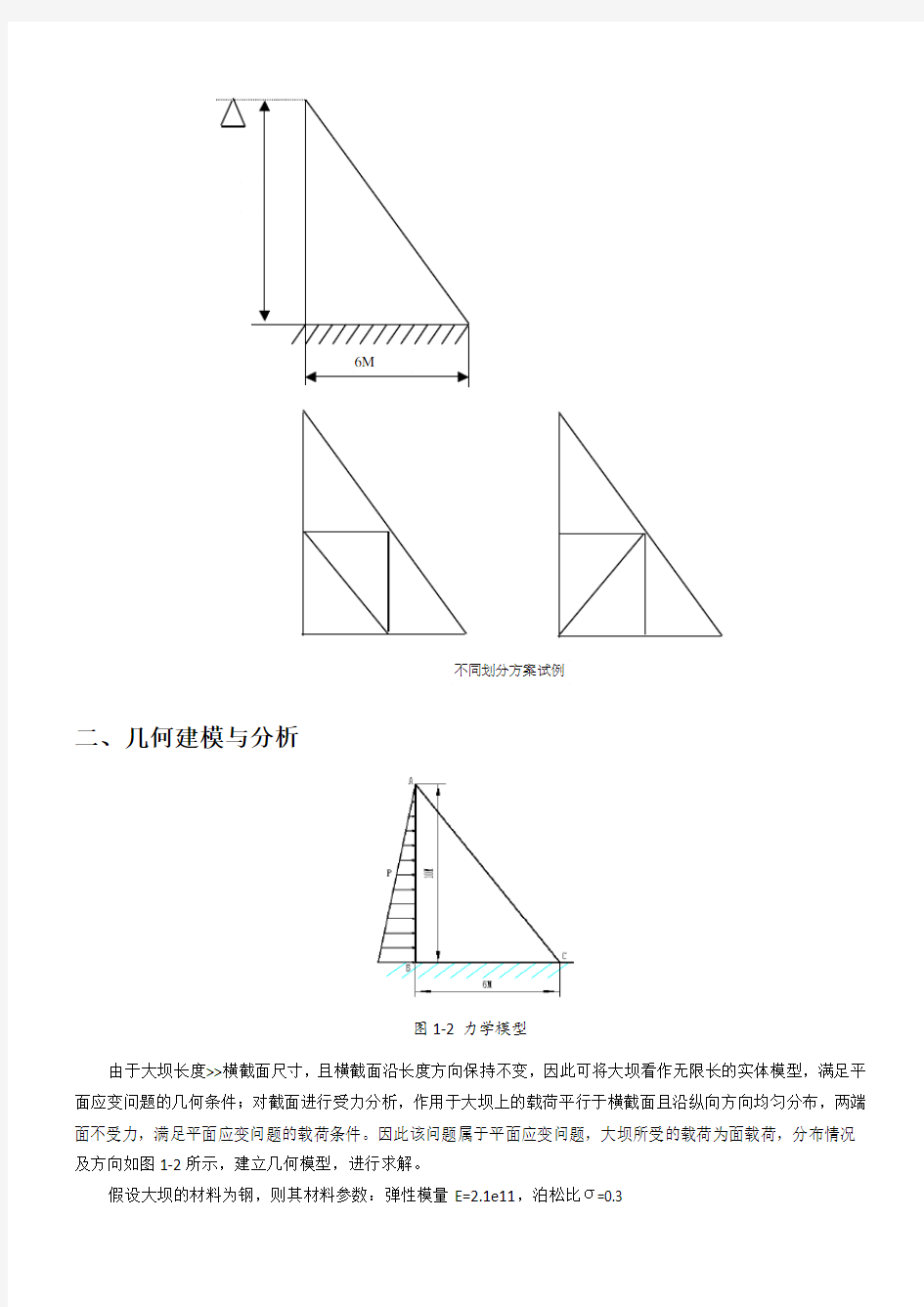
图1-2力学模型
由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图1-2所示,建立几何模型,进行求解。
假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3
三、第1问的有限元建模
本题将分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算。
1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural
2)选择单元类型:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元;六节点三角形单元选择的类型是PLANE183(Quad 8node183),该单元属于是八节点单元类型,在网格划分时可以对节点数目控制使其蜕化为六节点单元。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。
3)定义材料参数
4)生成几何模
a. 生成特征点
b.生成坝体截面
5)网格化分:划分网格时,拾取lineAB和lineBC进行Size Conrotls,设定input NDIV 为15;拾取lineAC,设定input NDIV 为20,选择网格划分方式为Tri+Mapped,最后得到600个单元。
6)模型施加约束:
约束采用的是对底面BC全约束。
大坝所受载荷形式为Pressure,作用在AB面上,分析时施加在L AB上,方向水平向右,载荷大小沿L AB由小到大均匀分布(见图1-2)。以B为坐标原点,BA方向为纵轴y,则沿着y方向的受力大小可表示为:
ρ(1)
P-
=
gh
=ρ
=
g
-
98000
{*
}
98000
)
(Y
10
y
其中ρ为水的密度,取g为9.8m/s2,可知P max为98000N,P min为0。施加载荷时只需对L AB插入预先设置的载荷函数(1)即可。
网格划分及约束受载情况如图1-3(a)和1-4(a)所示。
7)分析计算
8)结果显示
四、计算结果及结果分析
4.1计算结果
(1)三节点常应变单元
图1-3(a)常应变三节点单元的网格划分及约束受载图
图1-3(b)常应变三节点单元的位移分布图
(2)六节点三角形单元
图1-4(a)六节点三角形单元网格划分及约束受载图
图1-4(b) 六节点三角形单元的变形分布图
根据以上位移和应力图,可以得出常应变三节点单元和六节点三角形单元的最小最大位移应力如表1-1所示。
4.2 结果分析
由以上各图和数据表可知,采用三节点和六节点的三角形单元分析计算:
(1)最大位移都发生在A点,即大坝顶端,最大应力发生在B点附近,即坝底和水的交界处,且整体应力和位移变化分布趋势相似,符合实际情况;
(2)结果显示三节点和六节点单元分析出来的最大应力值相差较大,原因可能是B点产生了虚假应力,造成了最大应力值的不准确性。
(3)根据结果显示,最小三节点和六节点单元分析出来的最小应力值相差极为悬殊,结合理论分析,实际上A点不承受载荷,最小应力接近于零,显然六节点三角形单元分析在这一点上更准确。
(4)六节点的应力范围较大,所以可判断在单元数目相同的前提下,节点数目越多,分析精度就越大;但是节点数目的增多会不可避免地带来计算工作量增加和计算效率降低的问题。
五、第2问的有限元建模及计算结果
此次分析选择的单元类型为常应变三节点单元。选用三种不同单元数目情况进行比较分析。具体做法如下:有限元建模步骤与第1小题类似,只是在划分网格时,对L BC的AERA :Size Controls不同:依次设置单元边长度Element edge length为1.6、0.4、0.1,所获得的单元数目依次为96(图1-9(a))、1536(图1-10(a))、20880(图1-11(a));分别计算并得到位移变化图如图1-9(b)、1-10(b)、1-11(c)所示;分别计算并得到应力变化云图如图1-9(c)、1-10(c)、1-11(c)所示。
(1)单元数目为96的常应变三节点单元
图1-9(a)单元数目为96的网格划分及约束受载图
图1-9(b)单元数目为96的位移分布图
(2)单元数目为1536的常应变三节点单元
图1-10(a)单元数目为1536的网格划分及约束受载图
图1-10(b)单元数目为1536的位移分布图
图1-10(c)单元数目为1536的应力分布图
(3)单元数目为20880的常应变三节点单元
图1-11(a)单元数目为20880的网格划分及约束受载图
图1-11(b) 单元数目为20880的位移分布图
图1-11(c)单元数目为20880的应力分布图
由以上不同单元数目的位移应力分布图可以看出,大坝截面所受位移和应力的变化趋势是相同的,最大应力都发生在坝底和水的交界点附近,最小应力发生在大坝顶端;最大变形位移也是发生在坝顶。不同单元数目下计
算的数据如表1-2所示。
(4)结果分析
由以上分析结果可知:
(1)随着单元数目的增加,最大位移变化不大,应力变化范围逐步增大;
(2)随着单元数目的增加,即网格划分越密,分析的结果准确度将会提高;但是单元数目的增加和节点数
目的增加都会造成计算量的增加和计算速度的下降的问题。
(3)对于本次计算结果,仍可能存在虚假应力,应力的准确值无法准确得出,只是网格划分越密,计算结
果越精确。所以减少虚假应力影响的措施之一就是增加单元的数目,提高网格划分的密度。
五、第3问的有限元建模及计算结果
由图1-1所示的划分方案可知,需采用手动划分网格:首先创建6个节点,然后采用不同的方式连接节点创建单元,从而分别得到两种不同的网格划分方式,见下图1-12所示。
对底边的三个节点施加全约束;载荷建立方程式并创建table;其他的处理方式与第1小题相同。
图1-12方案一和二的划分方案图
有限元模型建立完成后进行求解,则可得到方案一和方案二的的位移图和应力图,如图1-13(a)、1-13(b)、
1-14(a)、1-14(b)所示。
图1-13(a)方案一网格划分方式下的位移图
图1-13(b)方案一网格划分方式下的应力图
图1-14(a)方案二网格划分方式下的位移图
由以上两种方案的位移和应力图可得出的最大位移和最小最大应力如表1-3所示:
由以上分析结果可知,由于方案一和二都只有四个单元,所以在计算应力和位移的时结果的准确度较低。分析应力图可知,方案二得出的最大应力不在坝底和水的交界处,不符合实际情况,而方案一的最大应力所在位置符合实际情况,所以总体来说,方案一的分析结果优于方案二。原因是方案一具有整体几何保形性的单元数目多于方案二的数目。
六、总结和建议
通过以上分析情况可以看出,如果要使分析结果较为精确,单元的类型选择要恰当。由第(1)小问计算结果可知,不同的单元类型会造成结果的不同,节点较多可以保证计算精度较高;由第(2)小问的计算结果可知,划分网格时,单元数目也不能太少,单元数目的增加也可以提高计算的精度;但是对于实际工程而言,采用较多节点的单元反而会增加计算的工作量,影响工作效率和经济性。因此在保证网格划分大小适当和均匀的前提下,
使应力集中处划的密集些,这样也能得到较为精确的结果。
华科大有限元分析题及大作业题答案——船海专业(DOC)
姓名:学号:班级:
有限元分析及应用作业报告 一、问题描述 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算; 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。
二、几何建模与分析 图1-2力学模型 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图1-2所示,建立几何模型,进行求解。 假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3 三、第1问的有限元建模 本题将分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算。 1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural 2)选择单元类型:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元;六节点三角形单元选择的类型是PLANE183(Quad 8node183),该单元属于是八节点单元类型,在网格划分时可以对节点数目控制使其蜕化为六节点单元。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 3)定义材料参数 4)生成几何模 a. 生成特征点 b.生成坝体截面 5)网格化分:划分网格时,拾取所有线段设定input NDIV 为10,选择网格划分方式为Tri+Mapped,最后得到200个单元。 6)模型施加约束: 约束采用的是对底面BC全约束。 大坝所受载荷形式为Pressure,作用在AB面上,分析时施加在L AB上,方向水平向右,载荷大小沿L AB由小到大均匀分布(见图1-2)。以B为坐标原点,BA方向为纵轴y,则沿着y方向的受力大小可表示为: ρ(1) = gh P- =ρ g = - 10 {* } 98000 98000 (Y ) y
有限元分析大作业报告
有限元分析大作业报告 试题1: 一、问题描述及数学建模 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: (1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算; (2)分别采用不同数量的三节点常应变单元计算; (3)当选常应变三角单元时,分别采用不同划分方案计算。 该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图所示。 二、采用相同单元数目的三节点常应变单元和六节点三角形单元计算 1、有限元建模 (1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences 为Structural (2)选择单元类型:三节点常应变单元选择的类型是Solid Quad 4 node182;六节点三角形单元选择的类型是Solid Quad 8 node183。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 (3)定义材料参数:弹性模量E=2.1e11,泊松比σ=0.3 (4)建几何模型:生成特征点;生成坝体截面 (5)网格化分:划分网格时,拾取lineAB和lineBC,设定input NDIV 为15;拾取lineAC,设定input NDIV 为20,选择网格划分方式为Tri+Mapped,最后得到600个单元。
(6)模型施加约束:约束采用的是对底面BC 全约束。大坝所受载荷形式为Pressure ,作用在AB 面上,分析时施加在L AB 上,方向水平向右,载荷大小沿L AB 由小到大均匀分布。以B 为坐标原点,BA 方向为纵轴y ,则沿着y 方向的受力大小可表示为: }{*980098000)10(Y y g gh P -=-==ρρ 2、 计算结果及结果分析 (1) 三节点常应变单元 三节点常应变单元的位移分布图 三节点常应变单元的应力分布图
有限元答案
1.1有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的? (1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。 (2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。 (3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。 1.3单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别? 单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。 整体刚度矩阵的性质:对称性、奇异性、稀疏性。 单元Kij物理意义Kij即单元节点位移向量中第j个自由度发生单位位移而其他位移分量为零时,在第j个自由度方向引起的节点力。 整体刚度矩阵K中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。 2.2什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件? (1)在外力作用下,物体内部将产生应力ζ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。 (2)外力势能就是外力功的负值。 (3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零 δΠp=δUε+δV=0 此即变分方程。对于线性弹性体,势能取最小值,即 δ2ΠP=δ2Uε+δ2V≧0 此时的势能变分原理就是著名的最小势能原理。 势能变分原理代表平衡方程、本构方程和应力边界条件,其中附加了几何方程和位移边界条件。 2.3什么是强形式?什么是弱形式?两者有何区别?建立弱形式的关键步骤是什么? 等效积分形式通过分部积分,称式 ∫ΩC T(v)D(u)dΩ+∫ΓE T(v)F(u)dΓ为微分方程的弱形式,相对而言,定解问题的微分方程称为强形式。 区别:弱形式得不到解析解。 建立弱形式的关键步骤:对场函数要求较低阶的连续性。 2.4为了使计算结果能够收敛于精确解,位移函数需要满足哪些条件?为什么? 只要位移函数满足两个基本要求,即完备性和协调性,计算结果便收敛于精确解。 2.6为什么采用变分法求解通常只能得到近似解?变分法的应用常遇到什么困难?Ritz法收敛的条件是什么? (1)在Ritz 法中,N决定了试探函数的基本形态,待定参数使得场函数具有一定的任意性。如果真实场函数包含在试探函数之内,则变分法得到的解答是精确的;如果试探函数取自完全的函数序列,则当项数不断增加时,近似解将趋近于精确解。然而,通常情况下试探函数不会将真实场函数完全包含在内,实际计算时也不可能取无穷多项。因此,试探函数只能是真实场函数的近似。可见,变分法就是在某个假定的范围内找出最佳解答,近似性就源于此。 (2)采用变分法近似求解,要求在整个求解区域内预先给出满足边界条件的场函数。通常情况下这是不可能的,因而变分法的应用受到了限制。 (3)Ritz 法的收敛条件是要求试探函数具有完备性和连续性,也就是说,如果试探函数满足完备性和连续性的要求,当试探函数的项数趋近于无穷时,则Ritz 法的近似解将趋近于数学微分方程的精确解。 3.1构造单元形函数有哪些基本原则?形函数是定义于单元内坐标的连续函数。单元位移函数通常采用多项式,其中的待定常数应该与单元节点自由度数相等。为满足完备性要求,位移函数中必须包括常函数和一次式,即完全一次多项式。多项式的选取应由低阶到高阶,尽量选择完全多项式以提高单元的精度。若由于项数限制而不能选取完全多项式时,也应使完全多项式具有坐标的对称性,并且一个坐标方向的次数不应超过完全多项式的次数。有时为了使位移函数保持一定阶次的完全多项式,可在单元内部配置节点。然而,这种节点的存在将增加有限元格式和计算上的复杂性,除非不得已才加以采用。形函数应保证用它定义的位移函数满足收敛要求,即满足完备性要求和协调性条件。 3.1构造单元形函数有哪些基本原则?试采用构造单元的几何方法,构造T10 单元的形函数,并对其收敛性进行讨论。 通常单元位移函数采用多项式,其中的待定常数由节点位移参数确定,因此其个数应与单元节点自由度数相等。根据实体结构的几何方程,单元的应变是位移的一次导数。为了反映单元刚体位移和常应变即满足完备性要求,位移函数中必须包含常数项和一次项,即完全一次多项式。 3.3何谓面积坐标?其特点是什么?为什么称其为自然坐标或局部坐标? (1)三角形单元中,任一点P(x,y)与其3个角点相连形成3个子三角形,其位置可以用下述称为面积坐标的三个比值来确定: L1=A1/A L2=A2/A L3=A3/A 其中A1,A2,A3分别为P23,P31,P12的面积。 (2)面积坐标的特点: a T3单元的形函数Ni就是面积坐标Li b面积坐标与三角形在整体坐标系中的位置无关。 c三个节点的面积坐标分别为节点1(1, 0, 0)、节点2(0, 1, 0)、节点3(0, 0, 1),形心的面积坐标为(1/3, 1/3, 1/3)。 d单元边界方程为Li=0(i=1,2,3) e在平行于23边的一条直线上,所有点都有相同的面积坐标L1(L1对应的三角形具有相同的高和底边),而且L1就等于此直线至23边的距离与节点1至23边的距离之比值。
西工大-有限元试题(附答案)
1.针对下图所示的3个三角形元,写出用完整多项式描述的位移模式表达式。 2.如下图所示,求下列情况的带宽: a)4结点四边形元; b)2结点线性杆元。 3.对上题图诸结点制定一种结点编号的方法,使所得带宽更小。图左下角的四边形在两种不同编号方式下,单元的带宽分别是多大 4.下图所示,若单元是2结点线性杆单元,勾画出组装总刚后总刚空间轮廓线。系统的带宽是多大按一右一左重新编号(即6变成3等)后,重复以上运算。
5.设杆件1-2受轴向力作用,截面积为A,长度为L,弹性模量为E,试写出 杆端力F 1,F 2 与杆端位移 2 1 ,u u之间的关系式,并求出杆件的单元刚度矩阵)(] [e k 6.设阶梯形杆件由两个等截面杆件○1与○2所组成,试写出三个结点1、2、3的 结点轴向力F 1,F 2 ,F 3 与结点轴向位移 3 2 1 , ,u u u之间的整体刚度矩阵[K]。 7.在上题的阶梯形杆件中,设结点3为固定端,结点1作用轴向载荷F 1 =P,求各结点的轴向位移和各杆的轴力。
8. 下图所示为平面桁架中的任一单元,y x ,为局部坐标系,x ,y 为总体坐标系,x 轴与x 轴的夹角为θ。 (1) 求在局部坐标系中的单元刚度矩阵 )(][e k (2) 求单元的坐标转换矩阵 [T]; (3) 求在总体坐标系中的单元刚度矩阵 )(][e k 9.如图所示一个直角三角形桁架,已知27/103cm N E ?=,两个直角边长度 cm l 100=,各杆截面面积210cm A =,求整体刚度矩阵[K]。
10.设上题中的桁架的支承情况和载荷情况如下图所示,按有限元素法求出各结点的位移与各杆的力。 11.进行结点编号时,如果把所有固定端处的结点编在最后,那么在引入边界条件时是否会更简便些 12.针对下图所示的3结点三角形单元,同一网格的两种不同的编号方式,单元的带宽分别是多大
有限单元法部分课后题答案
1.1 有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的? (1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。 (2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。 (3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。 1.3 单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别?单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。整体刚度矩阵的性质:对称性、奇异性、稀疏性。单元 Kij 物理意义 Kij 即单元节点位移向量中第 j 个自由度发生单位位移而其他位移分量为零时,在第 j 个自由度方向引起的节点力。整体刚度矩阵 K 中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。 2.2 什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件? (1)在外力作用下,物体内部将产生应力σ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。 (2)外力势能就是外力功的负值。 (3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零 δ∏p=δ Uε+δV=0 此即变分方程。对于线性弹性体,势能取最小值,即 δ2∏P=δ2Uε+δ2V≥0 此时的势能变分原理就是著名的最小势能原理。 势能变分原理代表平衡方程、本构方程和应力边界条件,其中附加了几何方程和位移边界条件。 2.3 什么是强形式?什么是弱形式?两者有何区别?建立弱形式的关键步骤是什么? 等效积分形式通过分部积分,称式 ∫ΩCT(v)D(u)dΩ+∫ΓET(v)F(u)dΓ 为微分方程的弱形式,相对而言,定解问题的微分方程称为强形式。 区别:弱形式得不到解析解。建立弱形式的关键步骤:对场函数要求较低阶的连续性。2.4 为了使计算结果能够收敛于精确解,位移函数需要满足哪些条件?为什么? 只要位移函数满足两个基本要求,即完备性和协调性,计算结果便收敛于精确解。 2.6 为什么采用变分法求解通常只能得到近似解?变分法的应用常遇到什么困难?Ritz 法收敛的条件是什么? (1)在 Ritz 法中,N 决定了试探函数的基本形态,待定参数使得场函数具有一定的任意性。如果真实场函数包含在试探函数之内,则变分法得到的解答是精确的;如果试探函数取自完全的函数序列,则当项数不断增加时,近似解将趋近于精确解。然而,通常情况下试探函数不会将真实场函数完全包含在内,实际计算时也不可能取无穷多项。因此,试探函数只能是真实场函数的近似。可见,变分法就是在某个假定的范围内找出最佳解答,近似性就源于此。 (2)采用变分法近似求解,要求在整个求解区域内预先给出满足边界条件的场函数。通常情况下这是不可能的,因而变分法的应用受到了限制。 (3)Ritz 法的收敛条件是要求试探函数具有完备性和连续性,也就是说,如果试探函数满足完备性和连续性的要求,当试探函数的项数趋近于无穷时,则 Ritz 法的近似解将趋近于数学微分方程的精确解。 3.1 构造单元形函数有哪些基本原则? 形函数是定义于单元内坐标的连续函数。单元位移函数通常采用多项式,其中的待定常数应该与单元节点自由度数相等。为满足完备性要求,位移函数中必须包括常函数和一次式,即完全一次多项式。多项式的选取应由低阶到高阶,尽量选择完全多项式以提高单元的精度。若由于项数限制而不能选取完全多项式时,也应使完全多项式具有坐标的对称性,并且一
有限元分析大作业试题
有限元分析习题及大作业试题 要求:1)个人按上机指南步骤至少选择习题中3个习题独立完成,并将计算结果上交; 2)以小组为单位完成有限元分析计算; 3)以小组为单位编写计算分析报告; 4)计算分析报告应包括以下部分: A、问题描述及数学建模; B、有限元建模(单元选择、结点布置及规模、网格划分方 案、载荷及边界条件处理、求解控制) C、计算结果及结果分析(位移分析、应力分析、正确性分 析评判) D、多方案计算比较(结点规模增减对精度的影响分析、单 元改变对精度的影响分析、不同网格划分方案对结果的 影响分析等) E、建议与体会 4)11月1日前必须完成,并递交计算分析报告(报告要求打印)。
习题及上机指南:(试题见上机指南) 例题1 坝体的有限元建模与受力分析 例题2 平板的有限元建模与变形分析 例题1:平板的有限元建模与变形分析 计算分析模型如图1-1 所示, 习题文件名: plane 0.5 m 0.5 m 0.5 m 0.5 m 板承受均布载荷:1.0e 5 P a 图1-1 受均布载荷作用的平板计算分析模型 1.1 进入ANSYS 程序 →ANSYSED 6.1 →Interactive →change the working directory into yours →input Initial jobname: plane →Run 1.2设置计算类型 ANSYS Main Menu : Preferences →select Structural → OK 1.3选择单元类型 ANSYS Main Menu : Preprocessor →Element T ype →Add/Edit/Delete →Add →select Solid Quad 4node 42 →OK (back to Element T ypes window) → Options… →select K3: Plane stress w/thk →OK →Close (the Element T ype window) 1.4定义材料参数 ANSYS Main Menu : Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY :0.3 → OK 1.5定义实常数 ANSYS Main Menu: Preprocessor →Real Constant s… →Add … →select T ype 1→ OK →input THK:1 →OK →Close (the Real Constants Window)
有限元试题及答案
有限元试题及答案
一判断题(20分) (×)1. 节点的位置依赖于形态,而并不依赖于载荷的位置 (√)2. 对于高压电线的铁塔那样的框架结构的模型化处理使用梁单元 (×)3. 不能把梁单元、壳单元和实体单元混合在一起作成模型 (√)4. 四边形的平面单元尽可能作成接近正方形形状的单元 (×)5. 平面应变单元也好,平面应力单元也好,如果以单位厚来作模型化 处理的话会得到一样的答案 (×)6. 用有限元法不可以对运动的物体的结构进行静力分析 (√)7. 一般应力变化大的地方单元尺寸要划的小才好 (×)8. 所谓全约束只要将位移自由度约束住,而不必约束转动自由度 (√)9. 同一载荷作用下的结构,所给材料的弹性模量越大则变形值越小(√)10一维变带宽存储通常比二维等带宽存储更节省存储量。 二、填空(20分) 1.平面应力问题与薄板弯曲问题的弹性体几何形状都是薄板,但前者受力特点是:平行于板面且沿厚度均布载荷作用,变形发生在板面内; 后者受力特点是:垂直于板面的力的作用,板将变成有弯有扭的曲面。 2.平面应力问题与平面应变问题都具有三个独立的应力分量:σx,σy,τxy ,三个独立的应变分量:εx,εy,γxy,但对应的弹性体几何形状前者为薄板,后者为长柱体。3.位移模式需反映刚体位移,反映常变形,满足单元边界上位移连续。 4.单元刚度矩阵的特点有:对称性,奇异性,还可按节点分块。
5.轴对称问题单元形状为:三角形或四边形截面的空间环形单元,由于轴对称的特性,任意一点变形只发生在子午面上,因此可以作为二维问题处理。6.等参数单元指的是:描述位移和描述坐标采用相同的形函数形式。等参数单元优点是:可以采用高阶次位移模式,能够模拟复杂几何边界,方便单元刚度矩阵和等效节点载荷的积分运算。 7.有限单元法首先求出的解是节点位移,单元应力可由它求得,其计算公式为。(用符号表示即可) 8.一个空间块体单元的节点有 3 个节点位移: u,v,w 9.变形体基本变量有位移应变应力基本方程平衡方程物理方程几何方程 10.实现有限元分析标准化和规范化的载体就是单元
有限元分析报告大作业
有限元分析》大作业基本要求: 1.以小组为单位完成有限元分析计算,并将计算结果上交; 2.以小组为单位撰写计算分析报告; 3.按下列模板格式完成分析报告; 4.计算结果要求提交电子版,一个算例对应一个文件夹,报告要求提交电子版和纸质版。 有限元分析》大作业 小组成 员: 储成峰李凡张晓东朱臻极高彬月 Job name :banshou 完成日 期: 2016-11-22 一、问题描述 (要求:应结合图对问题进行详细描述,同时应清楚阐述所研究问题的受力状况 和约束情况。图应清楚、明晰,且有必要的尺寸数据。)如图所示,为一内六角螺栓扳手,其轴线形状和尺寸如图,横截面为一外 接圆半径为0.01m的正六边形,拧紧力F为600N,计算扳手拧紧时的应力分布 图1 扳手的几何结构 数学模型
要求:针对问题描述给出相应的数学模型,应包含示意图,示意图中应有必要的尺寸数据;
图 2 数学模型 如图二所示,扳手结构简单,直接按其结构进行有限元分析。 三、有限元建模 3.1 单元选择 要求:给出单元类型, 并结合图对单元类型进行必要阐述, 包括节点、自由度、 实常数等。) 图 3 单元类型 如进行了简化等处理,此处还应给出文字说
扳手截面为六边形,采用4 节点182单元,182 单元可用来对固体结构进行
二维建模。182单元可以当作一个平面单元,或者一个轴对称单元。它由4 个结点组成,每个结点有2 个自由度,分别在x,y 方向。 扳手为规则三维实体,选择8 节点185单元,它由8 个节点组成,每个节点有3 个自由度,分别在x,y,z 方向。 3.2 实常数 (要求:给出实常数的具体数值,如无需定义实常数,需明确指出对于本问题选择的单元类型,无需定义实常数。) 因为该单元类型无实常数,所以无需定义实常数 3.3材料模型 (要求:指出选择的材料模型,包括必要的参数数据。) 对于三维结构静力学,应力主要满足广义虎克定律,因此对应ANSYS中的线性,弹性,各项同性,弹性模量EX:2e11 Pa, 泊松比PRXY=0.3 3.4几何建模由于扳手结构比较简单,所以可以直接在ANSYS软件上直接建模,在ANSYS建 立正六 边形,再创立直线,面沿线挤出体,得到扳手几何模型 图4 几何建模
ansys有限元分析大作业
ansys有限元分析大作业
有限元大作业 设计题目: 单车的设计及ansys有限元分析 专业班级: 姓名: 学号: 指导老师: 完成日期: 2016.11.23
单车的设计及ansys模拟分析 一、单车实体设计与建模 1、总体设计 单车的总体设计三维图如下,采用pro-e进行实体建模。 在建模时修改proe默认单位为国际主单位(米千克秒 mks) Proe》文件》属性》修改
2、车架 车架是构成单车的基体,联接着单车的其余各个部件并承受骑者的体重及单车在行驶时经受各种震动和冲击力量,因此除了强度以外还应有足够的刚度,这是为了在各种行驶条件下,使固定在车架上的各机构的相对位置应保持不变,充分发挥各部位的功能。车架分为前部和后部,前部为转向部分,后部为驱动部分,由于受力较大,所有要对后半部分进行加固。
二、单车有限元模型 1、材料的选择 单车的车身选用铝合金(6061-T6)T6标志表示经过热处理、时效。 其属性如下: 弹性模量:) .6+ 90E (2 N/m 10 泊松比:0.33 质量密度:) 3 2.70E+ N/m (2 抗剪模量:) 60E .2+ N/m (2 10 屈服强度:) .2+ (2 75E 8 N/m 2、单车模型的简化 为了方便单车的模拟分析,提高电脑的运算
效率,可对单车进行初步的简化;单车受到的力的主要由车架承受,因此必须保证车架能够有足够的强度、刚度,抗振的能力,故分析的时候主要对车架进行分析。简化后的车架如下图所示。 3、单元体的选择 单车车架为实体故定义车架的单元类型为实体单元(solid)。查资料可以知道3D实体常用结构实体单元有下表。 单元名称说明 Solid45 三维结构实体单元,单元由8个节点定义,具有塑性、蠕变、应力刚化、 大变形、大应变功能,其高阶单元是 solid95
完整word版有限元分析大作业报告要点
船海1004 黄山 U201012278 有限元分析大作业报告 试题1: 一、问题描述及数学建模 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: (1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算;(2)分别采用不同数量的三节点常应变单元计算; (3)当选常应变三角单元时,分别采用不同划分方案计算。 该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图所示。
二、采用相同单元数目的三节点常应变单元和六节点三角形单元计算 1、有限元建模 (1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural (2)选择单元类型:三节点常应变单元选择的类型是Solid Quad 4 node182;六节点三角形单元选择的类型是Solid Quad 8 node183。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 (3)定义材料参数:弹性模量E=2.1e11,泊松比σ=0.3 (4)建几何模型:生成特征点;生成坝体截面 (5)网格化分:划分网格时,拾取lineAB和lineBC,设定input NDIV 为15;拾取lineAC,设定input NDIV 为20,选择网格划分方式为Tri+Mapped,最后 得到600个单元。
1 船海1004 黄山 U201012278 (6)模型施加约束:约束采用的是对底面BC全约束。大坝所受载荷形式为Pressure,作用在AB面上,分析时施加在L上,方向水平向右,载荷大小沿L 由小到大均匀分布。以ABAB B为坐标原点,BA方向为纵轴y,则沿着y方向的受力大小可表示为: P?gh?gyY}*{?)??98000?9800(10? 2、计算结果及结果分析 (1)三节点常应变单元 三节点常应变单元的位移分布图
有限元复习题答案
1、何为有限元法?其基本思想是什么? 有限元法是一种基于变分法而发展起来的求解微分方程的数值计算方法,该方法以计算机为手段,采用分片近似,进而逼近整体的研究思想求解物理问题。 基本思想是化整为零集零为整。 2、为什么说有限元法是近似的方法,体现在哪里? 有两点:用离散单元的组合体来逼近原始结构,体现了几何上的近似;而用近似函数逼近未知变量在单元内的真实解,体现了数学上的近似。 3、单元、节点的概念? 节点:表达实际结构几何对象之间相互连接方式的概念 单元:网格划分中的每一个小部分称为单元,网格间相互联结点称为节点 4、有限元法分析过程可归纳为几个步骤? 结构离散化、单元分析、整体分析 5、有限元方法分几种?本课程讲授的是哪一种? 位移法、力法、混合法本课程讲授位移法 6、弹性力学的基本变量是什么?何为几何方程、物理方程及虚功方程?弹性矩阵的特点? 弹性力学变量:外力、应力、应变和位移。 描述弹性体应变分量与位移分量之间的方程称为几何方程;物理方程描述应力分量与应变分量之间的关系;弹性体上外力在虚位移发生过程中所做的虚功与储存在弹性体内的需应变能相等。 弹性矩阵由材料的弹性模量和泊松比确定,与坐标位置无关。 7、何为平面应力问题和平面应变问题? 平面应力问题:在结构上满足a几何条件:研究对象是等厚度薄板。b载荷条件:作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面无外力作用。 平面应变问题:满足a几何条件:长柱体,即长度方向的尺寸远远大于横截面的尺寸,且横截面沿长度方向不变。b载荷条件:作用于长柱体结构上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力两条件的弹性力学问题。 1、何为结构的离散化?离散化的目的?何为有限元模型? ①离散化:把连续的结构看成由有限个单元组成的集合体。②目的:建立有限元计算模型③通常把由节点,单元及相应的节点载荷和节点约束构成的模型称为有限元模型2、结构离散化时,划分单元数目的多少以及疏密分布,将直接影响到什么?确定单元数量的原则?通常如何设置节点?
重庆大学研究生有限元大作业教学内容
重庆大学研究生有限 元大作业
课程研究报告 科目:有限元分析技术教师:阎春平姓名:色学号: 2 专业:机械工程类别:学术 上课时间: 2015 年 11 月至 2016 年 1 月 考生成绩: 阅卷评语: 阅卷教师 (签名)
有限元分析技术作业 姓名: 色序号: 是学号: 2 一、题目描述及要求 钢结构的主梁为高160宽100厚14的方钢管,次梁为直径60厚10的圆钢管(单位为毫米),材料均为碳素结构钢Q235;该结构固定支撑点位于左右两端主梁和最中间。主梁和次梁之间是固接。试对在垂直于玻璃平面方向的2kPa 的面载荷(包括玻璃自重、钢结构自重、活载荷(人员与演出器械载荷)、风载荷等)作用下的舞台进行有限元分析。 二、题目分析 根据序号为069,换算得钢结构框架为11列13行。由于每个格子的大小为1×1(单位米),因此框架的外边框应为11000×13000(单位毫米)。 三、具体操作及分析求解 1、准备工作 执行Utility Menu:File → Clear&start new 清除当前数据库并开始新的分析,更改文件名和文件标题,如图1.1。选择GUI filter,执行 Main Menu: Preferences → Structural → OK,如图1.2所示
图1.1清除当前数据库并开始新的分析 图1.2 设置GUI filter 2、选择单元类型。 执行Main Menu: Preprocessor →Element Type →Add/Edit/Delete →Add→ select→ BEAM188,如图2.1。之后点击OK(回到Element Types window) →Close
有限元分析及其应用思考题附答案2012
有限元分析及其应用-2010 思考题: 1、有限元法的基本思想是什么?有限元法的基本步骤有那些?其中“离散”的含义是什 么?是如何将无限自由度问题转化为有限自由度问题的? 答:基本思想:几何离散和分片插值。 基本步骤:结构离散、单元分析和整体分析。 离散的含义:用假想的线或面将连续物体分割成由有限个单元组成的集合,且单元之间仅在节点处连接,单元之间的作用仅由节点传递。当单元趋近无限小,节点无限多,则这种离散结构将趋近于实际的连续结构。 2、有限元法与经典的差分法、里兹法有何区别? 区别:差分法:均匀离散求解域,差分代替微分,要求规则边界,几何形状复杂精度较低; 里兹法:根据描述问题的微分方程和相应的定解构造等价的泛函表达式,求得近似解; 有限元:基于变分法,采用分片近似进而逼近总体的求解微分方程的数值计算方法。 3、一根单位长度重量为q的悬挂直杆,上端固定,下端受垂直向下的外力P,试 1)建立其受拉伸的微分方程及边界条件; 2)构造其泛函形式; 3)基于有限元基本思想和泛函求极值构造其有限元的计算格式(即最小势能原理)。4、以简单实例为对象,分别按虚功原理和变分原理导出有限元法的基本格式(单元刚度矩 阵)。 5、什么是节点力和节点载荷?两者有何区别? 答:节点力:单元与单元之间通过节点相互作用 节点载荷:作用于节点上的外载 6、单元刚度矩阵和整体刚度矩阵各有何特点?其中每个矩阵元素的物理意义是什么(按自 由度和节点解释)? 答:单元刚度矩阵:对称性、奇异性、主对角线恒为正 整体刚度矩阵:对称性、奇异性、主对角线恒为正、稀疏性、带状性。 Kij,表示j节点产生单位位移、其他节点位移为零时作用i节点的力,节点力等于节点位移与单元刚度元素乘积之和。 7、单元的形函数具有什么特点?有哪些性质? 答:形函数的特点:Ni为x,y的坐标函数,与位移函数有相同的阶次。 形函数Ni在i节点的值为1,而在其他节点上的值为0; 单元内任一点的形函数之和恒等于1; 形函数的值在0~1间变化。 8、描述弹性体的基本变量是什么?基本方程有哪些组成? 答:基本变量:外力、应力、应变、位移 基本方程:平衡方程、几何方程、物理方程、几何条件 9、何谓应力、应变、位移的概念?应力与强度是什么关系? 答:应力:lim△Q/△A=S △A→0 应变:物体形状的改变 位移:弹性体内质点位置的变化 10、问题的微分方程提法、等效积分提法和泛函变分提法之间有何关系?何谓“强形 式”?何谓“弱形式”,两者有何区别?建立弱形式的关键步骤是什么?
有限元分析及应用大作业
有限元分析及应用大作业 作业要求: 1)个人按上机指南步骤至少选择习题中3个习题独立完成,并将计算结果上交; 也可根据自己科研工作给出计算实例。 2)以小组为单位完成有限元分析计算; 3)以小组为单位编写计算分析报告; 4)计算分析报告应包括以下部分: A、问题描述及数学建模; B、有限元建模(单元选择、结点布置及规模、网格划分方案、载荷及边界 条件处理、求解控制) C、计算结果及结果分析(位移分析、应力分析、正确性分析评判) D、多方案计算比较(结点规模增减对精度的影响分析、单元改变对精度的 影响分析、不同网格划分方案对结果的影响分析等) 题一:图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算;(注意ANSYS中用四边形单元退化为三节点三角形单元) 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。 解:1.建模: 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作
用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况P=98000-9800*Y;建立几何模型,进行求解;假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3; 2:有限元建模过程: 2.1 进入ANSYS : 程序→ANSYS APDL 15.0 2.2设置计算类型: ANSYS Main Menu: Preferences →select Structural →OK 2.3选择单元类型: ANSYS Main Menu: Preprocessor →Element Type→Add/Edit/Delete →Add →select Solid Quad 4node 182(三节点常应变单元选择Solid Quad 4node 182,六节点三角形单元选择Solid Quad 8node 183)→OK (back to Element Types window) →Option →select K3: Plane Strain →OK→Close (the Element Type window) 2.4定义材料参数: ANSYS Main Menu: Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY:0.3 →OK 2.5生成几何模型: 生成特征点: ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints→In Active CS →依次输入四个点的坐标:input:1(0,0),2(10,0),3(1,5),4(0.45,5) →OK 生成坝体截面: ANSYS Main Menu: Preprocessor →Modeling →Create →Areas →Arbitrary →Through KPS →依次连接四个特征点,1(0,0),2(6,0),3(0,10) →OK 2.6 网格划分: ANSYS Main Menu: Preprocessor →Meshing →Mesh Tool→(Size Controls) lines: Set →依次拾取两条直角边:OK→input NDIV: 15 →Apply→依次拾取斜边:OK →input NDIV: 20 →OK →(back to the mesh tool window)Mesh:Areas, Shape: tri, Mapped →Mesh →Pick All (in Picking Menu) →Close( the Mesh Tool window) 2.7 模型施加约束: 给底边施加x和y方向的约束: ANSYS Main Menu: Solution →Define Loads →Apply →Structural →Displacement →On lines →pick the lines →OK →select Lab2:UX, UY →OK 给竖直边施加y方向的分布载荷: ANSYS 命令菜单栏: Parameters →Functions →Define/Edit →1) 在下方的下拉列表框内选择x ,作为设置的变量;2) 在Result窗口中出现{X},写入所施加的载荷函数: 98000-9800*{Y};3) File>Save(文件扩展名:func) →返回:Parameters →Functions →Read from file:将需要的.func文件打开,参数名取meng,它表示随之将施加的载荷→OK →ANSYS Main Menu: Solution →Define Loads →Apply →Structural →Pressure →On Lines →拾取竖直边;OK →在下拉列表框中,选择:Existing table →OK →选择需要的载荷为meng参数名→OK 2.8 分析计算: ANSYS Main Menu: Solution →Solve →Current LS →OK(to close the solve Current Load
最新有限元法基础试题
有限元法基础试题(A ) 一、填空题(5×2分) 1.1单元刚度矩阵e T k B DBd Ω = Ω? 中,矩阵B 为__________,矩阵D 为___________。 1.2边界条件通常有两类。通常发生在位置完全固定不能转动的情况为_______边界,具体指定有限的非零值位移的情况,如支撑的下沉,称为_______边界。 1.3内部微元体上外力总虚功: ()(),,,,e x x xy y bx xy x y y by d W F u F v dxdy δστδτσδ??=+++++??+(),,,,x x y y xy y x u v u u dxdy σδσδτδδ??+++??的表达式中,第一项为____________________的虚功,第二项为____________________的虚功。 1.4弹簧单元的位移函数1N +2N =_________。 1.5 ij k 数学表达式:令j d =_____,k d =_____,k j ≠,则力i ij F k =。 二、判断题(5×2分) 2.1位移函数的假设合理与否将直接影响到有限元分析的计算精度、效率和可靠性。( ) 2.2变形体虚功原理适用于一切结构(一维杆系、二维板、三位块体)、适用于任何力学行为的材料(线性和非线性),是变形体力学的普遍原理。 ( ) 2.3变形体虚功原理要求力系平衡,要求虚位移协调,是在“平衡、协调”前提下功的恒等关系。 ( ) 2.4常应变三角单元中变形矩阵是x 或y 的函数。 ( ) 2.5 对称单元中变形矩阵是x 或y 的函数。 ( ) 三、简答题(26分) 3.1列举有限元法的优点。(8分) 3.2写出有限单元法的分析过程。(8分) 3.3列出3种普通的有限元单元类型。(6分) 3.4简要阐述变形体虚位移原理。(4分) 四、计算题(54分) 4.1对于下图所示的弹簧组合,单元①的弹簧常数为10000N/m ,单元②的弹簧常数为20000N/m ,单元③的弹簧常数为10000N/m ,确定各节点位移、反力以及单元②的单元力。(10分) 4.2对于如图所示的杆组装,弹性模量E 为10GPa ,杆单元长L 均为2m ,横截面面积A 均为2×10-4m 2,弹簧常数为2000kN/m ,所受荷载如图。采用直接刚度法确定节点位移、作用力和单元②的应力。(10分)
有限元分析报告大作业
基于ANSYS软件的有限元分析报告 机制1205班杜星宇U201210671 一、概述 本次大作业主要利用ANSYS软件对桌子的应力和应变进行分析,计算出桌子的最大应力和应变。然后与实际情况进行比较,证明分析的正确性,从而为桌子的优化分析提供了充分的理论依据,并且通过对ANSYS软件的实际操作深刻体会有限元分析方法的基本思想,对有限元分析方法的实际应用有一个大致的认识。 二、问题分析 已知:桌子几何尺寸如图所示,单位为mm。假设桌子的四只脚同地面完全固定,桌子上存放物品,物品产生的均匀分布压力作用在桌面,压力大小等于300Pa,其中弹性模量E=9.3GPa,泊松比μ=0.35,密度ρ=560kg/m3,分析桌子的变形和应力。
将桌脚固定在地面,然后在桌面施加均匀分布的压力,可以看作对进行平面应力分析,桌脚类似于梁单元。由于所分析的结构比较规整且为实体,所以可以将单元类型设为八节点六面体单元。 操作步骤如下: 1、定义工作文件名和工作标题 (1)定义工作文件名:执行Utility Menu/ File/Change Jobname,在弹出Change Jobname 对话框修改文件名为Table。选择New log and error files复选框。 (2)定义工作标题:Utility Menu/File/ Change Title,将弹出Change Title对话框修改工作标题名为The analysis of table。 (3)点击:Plot/Replot。 2、设置计算类型 (1)点击:Main Menu/Preferences,选择Structural,点击OK。