工业相机在高速抓拍图像中的应用

工业相机在高速抓拍图像中的应用
在工业机器视觉检测中,经常会有项目需要抓拍高速运动物体,而普通工业相机拍摄的图像会出现拉毛、模糊、变形等影响图像质量的问题,达不到客户项目需求,这时就需要高性能的工业相机来解决类似问题。维视图像经过十几年的工业相机研发经验,不断提高相机性能,努力完善实际应用中的各类问题,接下来就以MV-EM系列工业相机的高速抓拍功能为例大家说明。
先来看下面两图:
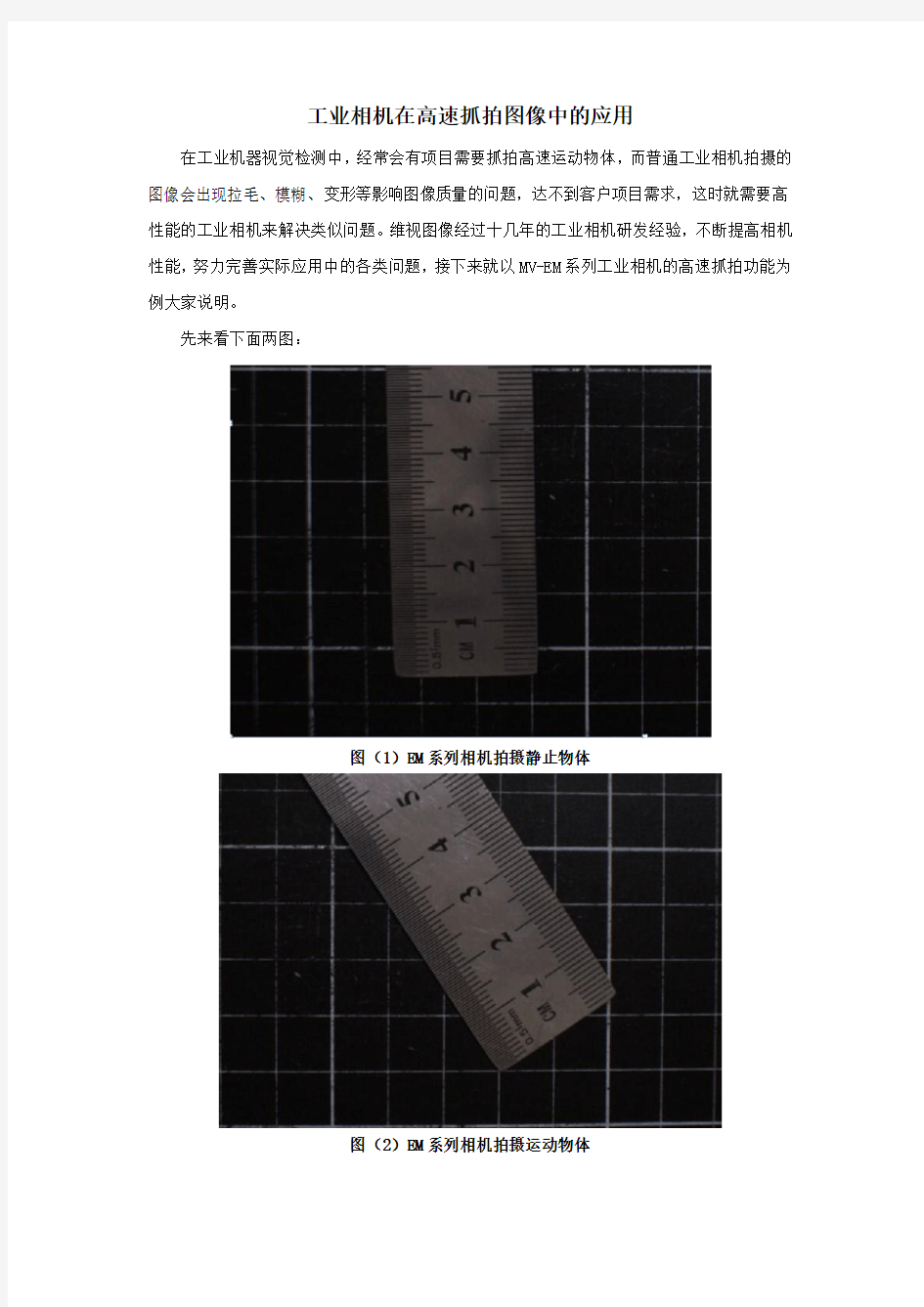
图(1)EM系列相机拍摄静止物体
图(2)EM系列相机拍摄运动物体
从以上两张图片中可以看出,即使在物体高速运动的情况下工业相机所呈现出来的图片也不会倾斜,图像不会因为物体的高速运动而受到影响。但是有一点需要大家注意的是,在拍摄图像时,图像模糊现象的出现取决于曝光时间的长短与物体的运动速度。如果曝光时间过长,物体运动速度过快则会出现图像模糊;如果曝光时间很短,类似于运动物体在瞬间被冻结了,则很少出现图像模糊的现象。那么如何选择高速抓拍的工业相机呢,接下来为大家简单说明一下:
1、色彩要求
要拍摄物体的颜色特征,就必须用颜色还原性比较好的相机;与颜色无关的一般情况下采用黑白相机。但有些要检测的特征可能在彩色图片里能够更好地显现,此时也可考虑使用彩色相机。
2、曝光时间
要满足物体运动速度Vp曝光时间Ts<允许最长拖影S。运动速度比较快的物体拍照,为了防止长的拖影就需要极短的曝光时间,选用感光比较好的工业相机,可以实现。
3、帧率指标
帧率即相机每秒钟可以捕捉的图像数量,一般决定于图像大小、曝光时间等,是相机的一个重要指标。相机帧率必须保证能够拍摄到系统要求时间间隔最短的两张图片,否则就有可能造成丢帧等现象,进而漏检某些产品。
影响工业相机高速抓拍的主要是以上几种因素,其它的比如镜头接口,芯片大小等几乎是没什么参考价值的,可以跟选用普通相机一样来进行选择。如果您目前对工业相机有需求,又不知道如何进行选择的话,请联系维视图像工程师为您详细解答。
Snap方式的图像采集程序
Snap方式的图像采集程序 第1步:调用IMAQ Init.vi完成图像采集板卡的初始化工作。 第2步:调用IMAQ Create.vi为图像数据创建一个数据缓冲区。 第3步:调用IMAQ Snap.vi从图像采集板卡中读入一帧图像数据,并把它放入先前创建的数据缓冲区中,并放入Image中显示。 第4步:当图像数据缓冲区被释放后,我们在前面板上将看不到采集的图像了,所以特地添加一个人为的延时程序,等待用户停止。 第5步:调用IMAQ Close.vi,释放占有的图像采集板卡。 第6步:调用IMAQ Dispose.vi,释放占有的图像数据缓冲区。 Grab方式的图像采集程序 IMAQ Snap.vi运行速度之所以会慢,是因为IMAQ Snap.vi除了实现图像数据采集的操作外,还实现了许多初始化和资源释放的操作。 既然是连续采集,在每次连续采集开始时,仅做一次初始化就可以。为实现快速的连续图像采集,NI Vision Module提供了两个VI,一个是IMAQ Grab Setup.vi,另一个是IMAQ Grab Acquire.vi。 IMAQ Grab Setup.vi负责每次连续采集前的初始化,IMAQ Grab Acquire.vi专注于图像采集。 第1步:调用IMAQ Init.vi完成图像采集板卡的初始化工作。 第2步:调用IMAQ Grab Setup.vi初始化Grab过程。 第3步:调用IMAQ Create.vi创建图像数据缓冲区。 第4步:调用IMAQ Grab Acquire.vi快速采集图像数据。 第5步:调用IMAQ Close.vi,释放占有的图像采集板卡。 第6步:调用IMAQ Dispose.vi,释放占有的图像数据缓冲区。 使用IMAQ Grab Acquire.vi,采集每帧图像的时间从120ms降到了40ms. 相机配置: 设置选中哪一种配置,包括出厂配置和三个用户配置。 1 User Set Save 保存上面选项选中的配置, 也就是将相机当前的所有参数保存到上面选中的配置中。 2 User Set Load 读取上面选项选中的配置,将选中的配置中的所有参数读取出来并配置到当前的相机中。 3 Default Startup Set 该项选择该相机加电之后的配置应用。
用Labview实现图像采集
用Labview实现图像采集 一、程序功能: 1.通过选择相机实现电脑摄像头或CCD连续图像采集。 2.控制图像采集时间。 3.显示图像采集速率和程序运行时间。 4.给采集到的图像命名并保存到特定的文件夹。 二、程序介绍: 1.前面板(控制面板) 要求:实现连续图像采集所需要的软件条件: 1.安装VAS(Vision Acquisition Software) 2.如果要实现CCD图像采集,需安装CCD的驱动程序 操作说明: 1.选择相机名称 2.设置采集时间 3.运行VI 相机名字:通过下拉菜单选择相机,包括电脑摄像头和USB接口的CCD设备采集速率。采集速率:实时显示采集图像的速率。 缓冲数:实时显示从程序运行开始采集图像的数目。 设置采集时间:根据需求设置采集时间。默认值为0,只采一幅图像。 采集进行时间:程序已经运行的时间。 设置保存路径:指定图片的保存位置。如果不设置,只进行实时采集不保存图像。Stop:采集停止。 图像:显示图像信息。左侧为兴趣区域选择工具,作用是使研究区域更加醒目,便于观察。从上到下依次是: 实现图形的放大 显示鼠标位置,不进行其他操作 拖动图片 选择兴趣区为一点 选择兴趣区为矩形包围的区域,两边为水平和竖直
选择兴趣区为矩形包围的区域,矩形方向任意 选择兴趣区为折线 选择兴趣区为折线区域(所画折线自动闭合) 选择兴趣区为曲线 选择兴趣区为曲线保卫的区域 选择兴趣区为椭圆 选择兴趣区为圆环 以折线兴趣区域为例,如图 2.后面板(程序框图) 1. 循环,将采集、保存、计时等功能循环进行。 在循环中,获取最新的图像并输出。 2.循环的初始条件设置,选择相机,并将相机作为循环的输入。 和前面版里的相机名字相对应,作用是选择相机。 打开一个照相机,查询摄像机功能,装载的照相机的配置文件,并创建一个唯一的参考到摄像机。 Camera Control Mode照相机控制模式,在控制器模式打开相机,配置和获取图像数据。Session In指定要打开摄像机的名称,默认值是CAM0。 Session Out是相机的一个参考,输出图像数据。 配置并开始抓取图像,抓取循环连续进行,并将抓取到的图像放到缓冲区,可以实现高速图像采集。 Session In/out作用与打开相机里的类似。 3.循环结束时,关闭相机,若循环出错,则关闭相机并报错。 终止采集程序并关闭相机。 当有错误输入时,破坏图像,并释放它在存储器占据的空间。 4.将从相机采集到的数据,以图像的形式输出,并计算图像采集速率和采集数,在前面板输出。 5.在循环中计算采集速率和程序运行速率,控制采集时间。 本部分与stop按钮以及错误三者共同控制条件的运行,当三个条件中的任意一个为真时,循环都会终止。 显示从指定起始时间起,已经用去的时间,达到目标时间后会重置。“已用时间(s)”可以输出程序运行的时间。将已用时间与设置时间进行比较,当已用时间大于设置时间是条件为真,控制循环停止。 6.在特定的路径保存图像,并通过循环为其命名。
基于Labview的图像采集与处理
目前工作成果: 一、USB图像获取 USB设备在正常工作以前,第一件要做的事就是枚举,所以在USB摄像头进行初始化之前,需要先枚举系统中的USB设备。 (1)基于USB的Snap采集图像 程序运行结果: 此程序只能采集一帧图像,不能连续采集。将采集图像函数放入循环中就可连续采集。
循环中的可以计算循环一次所用的时间,运行发现用Snap采集图像时它的采集速率比较低。运行程序时移动摄像头可以清楚的看到所采集的图像有时比较模糊。 (2)基于USB的Grab采集图像 运行程序之后发现摄像头采集图像的速率明显提高。
二、图像处理 1、图像灰度处理 (1)基本原理 将彩色图像转化成为灰度图像的过程成为图像的灰度化处理。彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的灰度化处理可用两种方法来实现。 第一种方法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。 第二种方法是根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。 (2)labview中图像灰度处理程序框图 处理结果:
K60图像采集程序
#include "MK60N512VMD100.h " /* include peripheral declarations */ #include "includes.h" #include "hw_uart.h" #define GPIO_PIN_MASK 0x1Fu //0x1f=31,限制位数为0--31有效 #define GPIO_PIN(x) (((1)<<(x & GPIO_PIN_MASK))) //把当前位置1 uint8 Date_Buffer[50][50]={0xff,0xff,0xff,0xff}; uint8 comond[4]={0x00,0xff,0x01,0x00}; volatile uint32 count=0; volatile uint32 flag=0; //give some delay~~ void delay() { int i =0; int j=0; for(i=0;i<1000;i++) for(j=0;j<1000;j++) asm("nop"); } //GPIO中断服务函数,每次中断P1P2 LED 常亮 void b_irq (void) { DisableInterrupts; //禁止总中断 PORTB_ISFR=1<<9; // Clear the PTB9 interrupt flags enable_irq(89); EnableInterrupts; } void c_irq(void) { uint8 *p=&Date_Buffer[count][0]; DisableInterrupts; //禁止总中断 PORTC_ISFR=1<<8; // Clear the PTC8 interrupt flags //GPIOA_PDOR &= ~GPIO_PDOR_PDO(GPIO_PIN(14)); //IO口输出低电平,亮 //delay();//暂停 // GPIOA_PDOR |= GPIO_PDOR_PDO(GPIO_PIN(14)); //IO口输出高电平,灭// delay();//暂停 *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff; *p++=GPIOB_PDIR&0xff;
图像采集系统设计
DSP实习报告 题目:图像采集系统的设计 班级:xxx 姓名:xxx 学号:xxx 指导老师:xxxx
目录 一.实习题目 (3) 二.实习背景知识 (3) 三.实习内容 (5) 四.实习程序功能与结构说明 (8) 六.实习心得 (19)
一、实习题目 图像采集系统的设计 二、实习目的: 1、熟练掌握数字信号处理的典型设计方法与技术手段; 2、熟悉D6437视频输入,输出端的操作及编程。; 3、掌握常用电子仪器设备的使用方法; 4、熟悉锐化变换算法。 三、实习背景知识 1、计算机 2、CCS3.3.软件 3、DSP仿真器 4、EL_DM6437平台 EL-DM6437EVM是低成本,高度集成的高性能视频信号处理开发平台,可以开发仿真达芬奇系列DSP应用程序,同时也可以将该产品集成到用户的具体应用系统中。方便灵活的接口为用户提供良好的开放平台。采用该系列板卡进行产品开发或系统集成可以大大减少用户的产品开发时间。板卡结构框图如图所示:
板卡硬件资源: TMS320DM6437 DSP ,可工作在400/600 MHz; 2 路视频输入,包括一个复合视频输入及一个S端子视频输入; 保留了视频输入接口,可以方便与CMOS影像传感器连接; 3 路视频输出,包括2路复合视频,一路S端子输出; 128MByte 的DDR2 SDRAM存储器,256MBit的Nor Flash存储器;用户可选的NAND Flash接口; 可选的256K字节的I2C E2PROM; 1个10M/100Mbps自适应以太网接口; 1 路立体声音频输入、1路麦克风输入,1路立体声音频输出; USB2.0高速接口,方便与PC连接; 1个CAN总线、1个UART接口、实时时钟(带256Byte的电池保持RAM);4个DIP开关,4个状态指示LED; 可配置的BOOT模式; 10层板制作工艺,稳定可靠; 标准外部信号扩展接口; JTAG仿真器接口; 单电源+5V供电; 板卡软件资源:
摄像头图像采集及处理范文
摄像头采集赛道黑线信息是本系统赛道信息获取的主要途径,本章将从摄像头工作原理、图像采样电路设计、和采样程序流程图三个方面进行介绍。 8.1 摄像头工作原理摄像头常分为彩色和黑白两种摄像头,主要工作原理是:按一定的分辨率,以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后将此电压值通过视频信号端输出。 在示波器上观察可知摄像头信号如图8.1所示。摄像头连续地扫描图像上的一行,就输出一段连续的电压视频信号,该电压信号的高低起伏正反映了该行图像的灰度变化情况。当扫描完一行,视频信号端就输出一低于最低视频信号电压的电平(如0.3V),并保持一段时间。这样相当于,紧接着每行图像对应的电压信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。然后,跳过一行后(因为摄像头是隔行扫描的方式),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着就会出现一段场消隐区。此区中有若干个复合消隐脉冲(简称消隐脉冲),在这些消隐脉冲中,有个脉冲,它远宽于(即持续时间长于)其他的消隐脉冲,该消隐脉冲又称为场同步脉冲,它是扫描换场的标志。场同步脉冲标志着新的一场的到来,不过,场消隐区恰好跨在上一场的结尾部分和下一场的开始部分,得等场消隐区过去,下一场的视频信号才真正到来。摄像头每秒扫描25 幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50 场图像。奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。 8.2 图像采样电路设计在本次比赛中赛道仅由黑白两色组成,为了获得赛道特征,只需提取探测画面的灰度信息,而不必提取其色彩信息,所以本设计中采用黑白摄像头。型号为: XB-2001B,分辨率为320*240。为了有效地获取摄像头的视频信号,我们采用LM1881提取行同步脉冲,消隐脉冲和场同步脉冲,电路原理图8.2所示。将视频信号通过一个电容接至LM1881的2脚,即可得到控制单片机进行A/D采样的控制信号行同步HS与奇偶场同步号 ODD/EVEN。
图像采集处理基础实验
图像采集处理基础实验 班级:14060242 学号:1406024248 姓名:张新雨
一、实验目的 1、了解摄像头OV9655的功能及其接口的设计方法; 2、用硬件描述语言编程实现OV9655接口电路,能够实时采集图像数据; 3、能够识别特定的黑白图像块,并通过LED的亮、灭进行表示。 二、实验器材 1、台式计算机 1台; 2、可编程逻辑器件实验软件1套; 3、可编程逻辑器件开发套件1套; 4、OV9655转接板1套。 三、实验说明 1、台式计算机用于向可编程逻辑逻辑器件实验软件提供编程、仿真及下载 平台; 2、可编程逻辑器件实验软件硬件描述语言的编程、仿真及下载提供平台; 3、可编程逻辑器件开发套件为本实验提供硬件平台; 4、OV9655转接板用于OV9655与开发套件的连接。 四、实验原理 1、OV9655作为一种高分辨率摄像头,具有如下特性: 1)工作电压低,灵敏度高,轻便易携; 2)支持标准的SCCB接口; 3)支持输出RGB、YUV、YCbCr格式数据; 4)支持多种分辨率,包括SXGA(1280×1024)、VGA(640×480)等; 5)支持多种自动图像控制功能,包括自动曝光控制、自动增益控制,自动白平衡等; 6)支持视频缩放等。 2、 OV9655主要引脚说明: 1)PWDN:掉电模式选择引脚; 2)RESETB:复位引脚; 3)PCLK:像素时钟输出引脚; 4)XVCLK1:系统时钟引脚; 5)HREF:行同步信号;
6)VSYNC:场同步信号; 7)SIO_C:SCCB接口时钟信号; 8)SIO_D:SCCB接口数据信号; 9)D[7:0]:像素点数据信号。 3、OV9655操作说明: 在摄像头正常工作之前,必须配置好相应的寄存器才能使摄像头完成指定的功能,如配置摄像头的像素输出时钟、自动控制功能等。通过标准的SCCB时序就能配置,SCCB时序图如图1所示。 图1 此次实验中,将摄像头的输出信号配置成RGB565格式信号,其数据输出时序图如图2所示,图中为一行像素数据的时序,再配合场同步信号就能读取摄像头的输出信号,场同步信号在数据有效时地变低,在一帧数据结束后变高。 图2 由于RGB565格式数据有十六位,而当OV9655的输出信号配置成RGB565格式时的数据位为8为,所以每个像素点的数据需要两个时钟信号才能读取完成,
摄像头图像采集程序与分析
打开摄像头: case IDM_OPENCAMERA: if(capDriverConnect(hwndCap, 0)==TRUE) { capDriverGetCaps(hwndCap , &CapDriver ,sizeof (CAPDRIVERCAPS) ); if (CapDriver.fHasOverlay) capOverlay(hwndCap ,TRUE); else { capPreviewRate(hwndCap ,66) ; capPreview(hwndCap, TRUE) ; } } else { MessageBox(hwndCap,"打开摄像头错误!\n 确定摄像头是否已连接","错误 ",MB_OK); }break; //采集,捕捉摄像头单帧图像 case IDM_CAPTUREIMG: capGrabFrame( hwndCap); break; //保存摄像头采集的图片 case IDM_CAPIMGSA VE: MenuOpenDlg(hwnd,"视频采集保存对话框","save"); capFileSaveDIB(hwndCap,TempName); break;
//VideoCapture.cpp #include
智能车模拟摄像头图像采集方法详解
智能车模拟摄像头 图像采集方法详解 --By LastRitter superyongzhe@https://www.360docs.net/doc/c64955103.html, https://www.360docs.net/doc/c64955103.html, 2009年11月16日
目录 目录 (2) 一、智能车程序的组成部分 (3) 二、采集方案选择 (4) 三、PAL信号格式 (5) 四、采集流程详解 (7) 五、部分源代码讲解 (11)
一、智能车程序的组成部分 基于CCD或者CMOS模拟摄像头的智能车程序主要包含以下部分: --图像,速度,加速度等数据采集; --数字图象处理,从图像中获取赛道信息; --以赛道信息,速度,加速度等传感器数据为输入参数进行自动控制,有PID,棒棒,模糊控制等算法。 --调试模块,要能将车的行驶状态等数据显示出来,主要有串口,液晶。最好还要有设置参数的按键,设计良好的调试模块能大大的加速我们的调试过程,不要觉得是浪费时间。
二、采集方案选择 对于摄像头图像采集,也可以用OV6620数字摄像头模块,或者使用高速外部AD进行采集。而在这篇文章中我主要要讲的是使用PAL制式黑白摄像头和单片机片内部AD来进行图像采集。另外根据摄像头的安装方式不同,也有旋转90度进行采集的。对于整个程序的流程也有很多不同,有采完一幅图像后进行处理的,也有采集一行就进行处理的。 这都是大同小异的地方,我在这里只讲旋转了90度,同时是采集完整一副图像后再处理的方案。之所以旋转90度是因为单片机速度的限制,纵向采集的点数比较多,横向的点数少的原因。旋转后可以解决这个问题,但是付出的代价是只能一整幅图像采集完后才能进行图像处理,增加了时间延迟。这是我当初选用的方案,但我现在并不建议使用这种方案,当车的速度很快时,这个时间延迟会很难以忍受的。
CCD图像采集 程序---详细注释,适合新手
近几天看到论坛里有很多网友遇到CCD图像采集的麻烦,我在最开始的时候也为这个烦恼过,由于本人比较菜,在度过大概半个月的绝望日夜后,在刚准备放弃时突然发现我已经采集到正确的图像了。特再次分享,希望能解决大家当前遇到的麻烦。 在采集图像之前,我们首先要知道摄像头输出信号的特性。目前的模拟摄像头一般都是P AL制式的,输出的信号由复合同步信号,复合消隐信号和视频信号。其中的视频信号才是真正的图像信号,对于黑白摄像头,图像越黑,电压越低,图像越白,电压越高。而复合同步信号是控制电视机的电子枪对电子的偏转的,复合消隐信号是在图像换行和换场时电子枪回扫时不发射电子。由于人眼看到的图像大于等于24Hz时人才不会觉得图像闪烁,所以P AL制式输出的图像是25Hz,即每秒钟有25幅画面,说的专业点就是每秒25帧,其中每一帧有625行。但由于在早期电子技术还不发达时,电源不稳定,容易对电视信号进行干扰,而交流电源是50Hz所以,为了和电网兼容,同时由于25Hz时图像不稳定,所以后来工程师们把一副图像分成两场显示,对于一幅画面,一共有625行,但是电子枪先扫描奇数场1,3,5.....,然后再扫描2,4,6.....,所以这样的话,一副图像就变成了隔行扫描,每秒钟就有50场了。其中具体的细节请参考这个网站 电视原理与系统 https://www.360docs.net/doc/c64955103.html,/zsb/zjx/zjx09/zjx090000.htm 只用看前面的黑白全电视信号和P AL制式就可以了(当然如果感兴趣可以全部看完)。 通过上面的内容如果你对P AL制式信号了然于心,那么就可以开始图像的采集了,P AL输出的信号有复合同步信号,复合消隐信号和视频信号。那么我们首先就是要从这三种信号中分理出复合同步信号,复合消隐信号和视频信号,以便我们对AD采样到的值进行存储,从而形成一幅画面。具体如何分离,我们使用的是LM1881视频同步分离器件,具体的硬件连接请参看论坛内相关文章(论坛里有介绍LM1881的文章,自己搜吧,我不重复了)。 分离出行场同步,奇偶场信号后,就把他们接到单片机的外部中断口,产生中断,在中断服务程序中对AD采集到的数据进行图像存储,从而形成一个二维数组的数字图像。 下面就说说图像采集方案,方法有多种,但我使用的方案是在行终端中读取A D采样的灰度值,在场同步中交换图像采集和处理缓存指针,并对图像进行处理,然后控制小车,在主函数中只有初始化和键盘扫描和串口输出函数。这样做效率比较高,而且可以把调试和图像采集处理分开,变成起来比较方便。 大家遇到的还有一个很棘手的问题可能是AD采样频率该设置多大呢?建议大家先通过PLLL超频,然后把AD时钟频率设置的高点才行。 下面就把我的代码贴给大家看看吧。
用Labview实现图像采集
用L a b v i e w实现图像采 集 Last revision on 21 December 2020
用L a b v i e w实现图像采集 一、程序功能: 1.通过选择相机实现电脑摄像头或CCD连续图像采集。 2.控制图像采集时间。 3.显示图像采集速率和程序运行时间。 4.给采集到的图像命名并保存到特定的文件夹。 二、程序介绍: 1.前面板(控制面板) 要求:实现连续图像采集所需要的软件条件: 1.安装VAS(Vision Acquisition Software) 2.如果要实现CCD图像采集,需安装CCD的驱动程序 操作说明: 1.选择相机名称 2.设置采集时间 3.运行VI 相机名字:通过下拉菜单选择相机,包括电脑摄像头和USB接口的CCD设备采集速率。采集速率:实时显示采集图像的速率。 缓冲数:实时显示从程序运行开始采集图像的数目。 设置采集时间:根据需求设置采集时间。默认值为0,只采一幅图像。 采集进行时间:程序已经运行的时间。 设置保存路径:指定图片的保存位置。如果不设置,只进行实时采集不保存图像。Stop:采集停止。 图像:显示图像信息。左侧为兴趣区域选择工具,作用是使研究区域更加醒目,便于观察。从上到下依次是: 实现图形的放大 显示鼠标位置,不进行其他操作 拖动图片 选择兴趣区为一点 选择兴趣区为矩形包围的区域,两边为水平和竖直 选择兴趣区为矩形包围的区域,矩形方向任意
选择兴趣区为折线 选择兴趣区为折线区域(所画折线自动闭合) 选择兴趣区为曲线 选择兴趣区为曲线保卫的区域 选择兴趣区为椭圆 选择兴趣区为圆环 以折线兴趣区域为例,如图 2.后面板(程序框图) 1.循环,将采集、保存、计时等功能循环进行。 在循环中,获取最新的图像并输出。 2.循环的初始条件设置,选择相机,并将相机作为循环的输入。 和前面版里的相机名字相对应,作用是选择相机。 打开一个照相机,查询摄像机功能,装载的照相机的配置文件,并创建一个唯一的参考到摄像机。 Camera Control Mode照相机控制模式,在控制器模式打开相机,配置和获取图像数据。 Session In指定要打开摄像机的名称,默认值是CAM0。 Session Out是相机的一个参考,输出图像数据。 配置并开始抓取图像,抓取循环连续进行,并将抓取到的图像放到缓冲区,可以实现高速图像采集。 Session In/out作用与打开相机里的类似。 3.循环结束时,关闭相机,若循环出错,则关闭相机并报错。 终止采集程序并关闭相机。 当有错误输入时,破坏图像,并释放它在存储器占据的空间。 4.将从相机采集到的数据,以图像的形式输出,并计算图像采集速率和采集数,在前面板输出。 5.在循环中计算采集速率和程序运行速率,控制采集时间。 本部分与stop按钮以及错误三者共同控制条件的运行,当三个条件中的任意一个为真时,循环都会终止。 显示从指定起始时间起,已经用去的时间,达到目标时间后会重置。“已用时间(s)”可以输出程序运行的时间。将已用时间与设置时间进行比较,当已用时间大于设置时间是条件为真,控制循环停止。 6.在特定的路径保存图像,并通过循环为其命名。 以BMP格式将图像下写入文件,通过下拉菜单也可以使文件的格式为JPEG、JPEG2000、PNG、PNG、TIFF等格式。 创建文件的保存路径。
毕业设计图像采集
题目基于LabVIEW平台下的图像采集 院系名称:信息工程学院 专业班级:计算机应用技术 学生姓名:朱慧 学号:110401121 指导教师:周老师 2014年4月25日
目录 摘要 (1) 第一章引言 (2) 1.1LabVIEW简介 (2) 1.2LabVIEW软件的基本组成 (2) 1.3程序前面板 (2) 1.4框图程序 (2) 2.6LabVIEW特点 (3) 2.7LabVIEW的优势 (3) 第三章毕业设计任务书 (4) 3.1基于labview的信号系统摄像头设计 (4) 3.2实验要求 (4) 3.3设计目的 (4) 第四章基于LABVIEW图像采集内容 (5) 4.1基于LabVIEW环境下图像采集介绍 (5) 4.2图像采集原理分析 (6) 4.3图像采集流程图设计 (8) 4.3图像采集前面板设计 (9) 4.4图像采集程序框图设计 (9) 4.4.1前面面板视频窗口的设置程序 (10) 4.4.2图像采集并显示的程序设计 (11) 4.4.3图像采集定时循环程序 (12) 4.4.4图像采集程序调试 (13) 第5章总结和展望 (14) 致谢 (16) 参考文献 (17)
摘要 图像与人们的生产生活息息相关,它不仅能够辨别大千世界的各种色彩,而且向人们直观形象的展现和记录生活的片段。图像成为人们获取信息的主要来源,据统计人类有80%以上的信息来自于图像。随着计算机软件、硬件技术的日新月异的发展和普及,人类已经进入一个高速发展的信息化时代,这必然使得图像采集技术的全面更新和进步,以适应现代信息技术发展的需求,同时图像采集技术也是卫星军事技术等方面的重要科研领域。图像显示系统包括图像采集、图像传输、图像存储、图像处理和图像分析等。其中图像显示是图像采集技术的基础和前提,图像显示是指把将采集到得图像数据以完整的模式显示出来。 随着计算机技术的发展和计算机应用的拓展,越来越迫切的需要将外面的信息传输到计算机当中进行显示和监控,而图像采集技术作为图像信息处理的基础,是图像处理技术的关键。传统的显示方法是应用VC++进行开发,在这种开发环境下的开发有很高的编程要求,这要求编程人员具有很高的编程能力并且对VC具有很高的认识。 本文是基于LabVIEW2010版本下开发的图像采集的应用程序,开发简单,操作方便。论文简要分析了图像采集的原理,功能和简单应用。 关键字:Labview图像采集图像处理
基于单片机的图像采集系统设计
目录 0 前言 (1) 1总体方案设计 (1) 2 系统硬件设计 (3) 3 软件设计 (9) 3.1软件设计概述 (9) 3.2程序流程图 (9) 3.3子程序模块设计 (10) 4系统调试及结果分析 (11) 5结论及进一步设想 (14) 参考文献 (14) 课程设计体会 (15) 附录1 元件清单 (16) 附录2 系统电路图 (17) 附录3 源程序 (18)
基于单片机的图像采集系统 刘杰薇沈阳航空航天大学自动化学院 摘要:传统的工业级图像处理采集系统大多是由CCD摄像头、图像采集卡和PC机组成,虽已得到了广泛的应用,但是它具有结构复杂,成本高,体积大,功耗大等缺点。随着单片机的迅速发展,开发一种智能控制及智能处理功能的微型图像处理采集系统成为可能,并且也克服了传统图像处理采集系统的诸多缺点。 本设计的图像采集系统采用AT89C51单片机为中心器件,利用74LS373寄存器、62256存储器。将软、硬件有机地结合起来,使得系统能够实现对摄像头传输的图像信号的采集,并保存在外置存储芯片中。其中软件系统采用C语言编写程序,包括延时程序、地址顺延程序等,硬件系统利用PROTEUS强大的功能来实现,简单切易于观察,在仿真中就可以观察到实际的工作状态。 关键字:单片机;图像采集;数字摄像头 0前言 近年来随着科技的飞速发展,单片机的应用正在不断的走向深入,同时带动着传统控制检测日新月异更新。在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,仅单片机方面的知识是不够的,还要根据具体的硬件结构,以及针对具体的应用对象的软件结合,加以完善。数字图像采集由于其大数据量通常采用DSP等高速处理器来实现。在某些领域方面图像实时性的要求并没有那么高,因此,本文采用STC89C51单片机作为控制器进行图像采集。 1总体方案设计 方案一: 由于C51单片机的RAM存储容量有限,而且受到C51单片机的IO工作频率的限制,直接通过C51单片机采集完整一帧的数字信号很难实现。因此,在C51单片机和数字摄像头之间加入一个先进先出存储器,由PC端通过串口控制C51单片机启动采集信号,采集一帧数据先放入存储器,然后单片机从存储器读出数据并通过串口发送至PC显示。整体设计框图如下:
ov7620图像采集程序
#include 当选定好机器视觉的软硬件平台后,下一步就是图像采集。本章将详细讨论基于USB 摄像头的图像采集和工业相机的图像采集,大家可以根据手中硬件的不同而选读不同的部分。从软件的视角来看,尽管硬件不同,但编程的思路和模式是基本一致的。 本文使用的工业相机是Panasonic的BP330,它是一款遵循CCIR标准的黑白相机,图像采集卡是NI公司的PCI-1407(任何标准制式的黑白模拟相机都可以接到PCI-1407)。把相机连接到PCI-1407后,即可在MAX下找到PCI-1407,点击Grab 按钮,还可以采集到图像,如图3.1所示。 图3.1 在MAX里面采集图像 如果你使用的是USB 摄像头,那么请参考Error! Reference source not found.Error! Reference source not found.,运行imaqUSB examples.llb中的Grab.vi。在软硬件正常工作的情况下,可以看到从USB 摄像头中传出的图像,如Error! Reference source not found.所示。 在进行机器视觉系统开发前,我们通常都会如上所示先验证软硬件是否能正常工作,以便后续开发。 3.1 采集单幅图像 3.1.1基于图像采集卡的Snap操作 采集单幅图像是基本的图像采集操作之一,对应的动作叫Snap。每次Snap时,图像数据先从相机传到图像采集卡,然后再传到计算机的内存(图像处理缓冲区)中去,如图3.2所示。 图3.2 Snap方式采集图像过程 Snap方式的图像采集程序如图3.3所示: 第1步:调用IMAQ Init.vi完成图像采集板卡的初始化工作。 第2步:调用IMAQ Create.vi为图像数据创建一个数据缓冲区。 第3步:调用IMAQ Snap.vi从图像采集板卡中读入一帧图像数据,并把它放入先前创建的数据缓冲区中,并放入Image中显示。 第4步:当图像数据缓冲区被释放后,我们在前面板上将看不到采集的图像了,所以特地添加一个人为的延时程序,等待用户停止。 第5步:调用IMAQ Close.vi,释放占有的图像采集板卡。 第6步:调用IMAQ Dispose.vi,释放占有的图像数据缓冲区。 图3.3 Snap范例程序 单幅图像采集的运行结果,如图3.4所示。 图3.4 单幅图像采集 图像处理过程 图像处理作为小车走迷宫过程中获得信息的第一过程,对于小车的计算路径和确认位置起到了根本的作用,经过了对于OPENCV和LABVIEW两种软件的了解,我们发现虽然OPENCV 在图像处理方面确实十分强大,但是其扩展性与易用性均不如LABVIEW来的好,我们权衡利弊,决定使用LABVIEW进行对于图像的处理。 LABVIEW以其强大的虚拟仪器库著称,我们在本次小车图像处理中用到了以下的组件: 1. https://www.360docs.net/doc/c64955103.html,bview 8.2 2. NI.Vision.v8.5.Acquisition.Software 3. NI.Vision.v8.5.Development.Module 4. NI-IMAQ FOR USB* *对于XP SP2系统还需要加载ImaqDirectShowDll.dll、ImaqDirectShowExportDll.dll 图像处理部分分为主要由以下几个部分组成的: 1.图像采集 2.图像阈值分析和转化 3.迷宫出入口检测与小车检测 4.迷宫转化成数组(提供给迷宫算法的接口) 在Labview中我们可以很容易的利用其本身就拥有的扩展库来完成以上的操作,下面对于我们的图像处理程序进行介绍: 1.图像采集 我们组在图像采集部分采用的是动静结合的方法,即先采集一张静态的迷宫图像,通过这个图像,标定出迷宫出入口和小车初始位置,事先计算出小车应该走的路径,之后在小车开始行动之后进行动态采集,分析小车的位置,再对比算出的位置与之前的最短路径来确定小车如何行动。相对于其他组利用OPENCV进行的动态采集,需要不断的计算路径和修正小车方向,我们的方法大大减少了运算量,也减少了小车卡在角落的可能。 静态采集较为简单,可以通过外部软件获取图像,也可以直接调用Labview中NI-IMAQ组件的相关函数来进行单次的采集,在这里我们利用的是Labview中NI-IMAQ相关函数机器视觉_图像采集
图像处理过程