一类非完整移动机器人编队控制方法_张瑞雷
第28卷第11期V ol.28No.11
控制与决策
Control and Decision
2013年11月
Nov.2013一类非完整移动机器人编队控制方法
文章编号:1001-0920(2013)11-1751-05
张瑞雷,李胜,陈庆伟
(南京理工大学自动化学院,南京210094)
摘要:针对大部分两轮非完整移动机器人轮轴中心与几何中心不重合的特点,提出一种多机器人协调编队控制算法.构造队形参数矩阵确定编队形状,根据领航机器人和相关队形参数生成虚拟机器人,把编队控制分解为跟随机器人对虚拟机器人的轨迹跟踪.建立虚拟机器人与跟随机器人之间误差系统模型,利用Lyapunov理论设计相应控制器,从而实现队形保持和变换.应用microsoft robotics developer studio4(MRDS4)搭建3D仿真平台,设计3组实验,结果进一步验证了所提出方法的有效性.
关键词:非完整移动机器人;轨迹跟踪;编队控制;队形变换
中图分类号:TP273文献标志码:A
Formation control for a kind of nonholonomic mobile robots
ZHANG Rui-lei,LI Sheng,CHEN Qing-wei
(School of Automation,Nanjing University of Science and Technology,Nanjing210094,China.Correspondent: ZHANG Rui-lei,E-mail:zhangrelay@https://www.360docs.net/doc/c717858276.html,)
Abstract:For the problem that the wheel-axle center and the geometric center of the most nonholonmic mobile robot are noncoincidence,the formation coordination control algorithm is proposed in this paper.The shape of formation is determined by the parameter matrix and the virtual robot is generated according to the lead robot and related formation parameters, translating the formation control problem into the trajectory tracking problem between the follow robot and virtual robot. The error system model between two robots is built,and the control algorithm is designed by using the Lyapunov theory for the formation keeping and transforming.Three groups of experiment are designed by the microsoft robotics developer studio 4,and the simulation results show the effectiveness of the presented method.
Key words:nonholonomic mobile robot;trajectory tracking;formation control;formation transform
0引言
近年来,机器人的协调控制成为多机器人系统研究的热点.多机器人通过协调能完成某些单个机器人不能完成的任务,通常有更高的效率.编队控制是一个典型的多机器人协调问题,在地理勘测、侦查、救援、扫雷和运输等领域具有广阔的应用前景.目前,多机器人的编队控制算法主要包括基于行为的方法[1-2]、虚拟结构法[3-4]和领航-跟随法[9-12].
文献[2]研究了一组仅有局部感知和少量通讯的分布式机器人,通过全局行为的队形控制方法,实现了多机器人编队的建立和保持.文献[3]针对通信范围和带宽限制,基于虚拟结构法,提出了一种统一的分布式编队控制结构,结合一致性理论和轨迹跟踪,实现了多机器人编队拓扑的切换和控制.文献[4]提出了一种基于模型预测控制方法的编队控制器,并将其用于跟踪虚拟领航机器人.文献[5]将领航-跟随方法应用于潜水器领域.文献[6-8]研究了一类控制输入受约束非完整移动机器人的编队控制问题.文献[9]将编队控制问题分解为轨迹跟踪、机器人控制和队形控制3个子问题,通过l-?和l-l控制,采用输入输出反馈线性化方法实现了多机器人的编队控制.文献[10]通过在跟随机器人上安装观测器来估计领航机器人速度,仅依靠通信位置信息实现编队控制,但编队精度较差,领航机器人做复杂运动时,编队保持不理想.
非完整约束机器人在纯滚动、无滑动的情况下,使用反馈线性化的队形控制方法需要选定离轴点,该点位于机器人的前进方向,与质心有一定的偏移量,
收稿日期:2012-09-17;修回日期:2012-12-25.
基金项目:国家自然科学基金项目(60975075,61074023).
作者简介:张瑞雷(1985?),男,博士生,从事机器人智能控制、多机器人协调控制的研究;陈庆伟(1963?),男,教授,博士生导师,从事智能控制与智能系统等研究.
1752
控制与决策
第28卷
当此偏移量较大时,引起较大的队形误差;较小时,产生不合适的运动.文献[11]提出的队形控制方法解决了上述问题,但该算法的实现要保证内三角形的关系.文献[12]在此基础上提出了改进的编队控制算法,实现了包括线性队形在内的队形控制.
上述文献研究机器人的运动学模型多为轮轴中心与几何中心重合的两轮差动机器人,并且对队形的控制精度分析较少,没有讨论不同速度条件对跟踪误差影响,跟随机器人与领航者之间也是单向通信的关系.本文在此基础上针对轮轴中心与几何中心不重合的非完整移动机器人设计编队控制策略,实现了编队形状的保持和变换.最后,利用MRDS4仿真平台设计实验进行了算法验证.
1编队控制结构
1.1队形描述
多机器人编队的队形通常有线形、柱形、菱形和梯形等,如图1所示.
(a)
(b)
( )
c 1234
R 1
R 2
R 3R 4
(d)
图14个机器人典型队形结构
编队系统一般设定一个主领航机器人,负责提供编队的导航,决定编队的主轨迹.如果系统中的两个机器人存在局部的领航与跟随关系,则分别称这两个机器人为领航机器人和跟随机器人.例如图1(c)中,
R 1为主领航机器人;R 1-R 2,R 1-R 3和R 2-R 4为3个
局部领航-跟随对.为了指定队形参数、跟踪的领航机器人的编号,定义队形参数矩阵
F =[F 1F 2???F n ]
3×n
.(1)
其中:F n =[i r n ρr n ?r n ]T
表示机器人R n 的队形参数,
它包含3部分,分别为R n 跟踪机器人的编号i r n ,与对
应领航机器人保持的期望距离ρr n 和期望角度?r
n ,一
般选定R 1为主领航机器人,定义主领航机器人R 1队形参数F 1=[000]T
.1.2控制结构
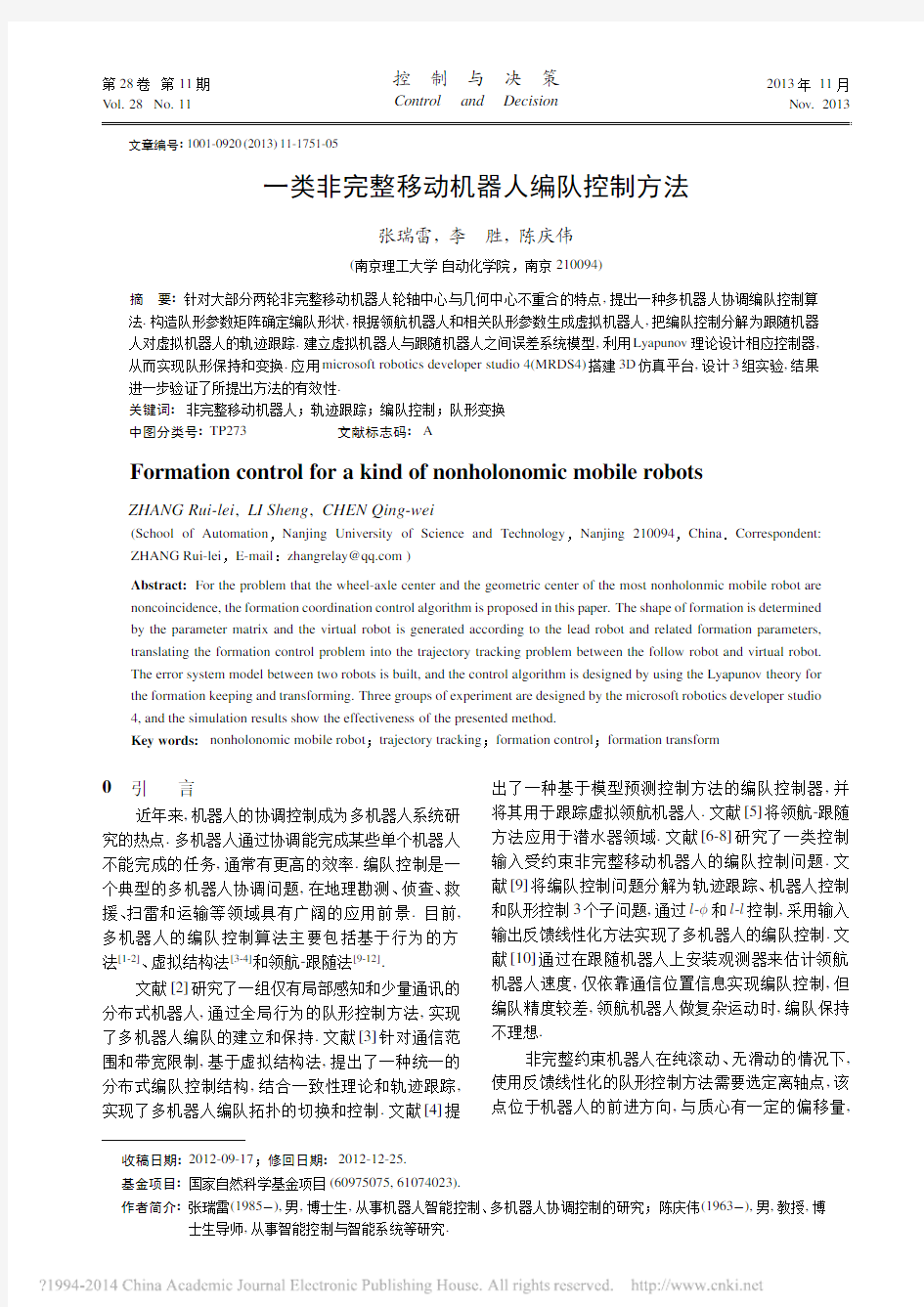
在控制器设计前,简要描述一下系统的控制结构.系统主要分为两层,上层为通信协调层,主要提供多机器人之间通信和协调信息,下层为领航-跟随控制层,如图2所示.
()x y l l l ,,θθ图2领航-跟随控制结构
2控制器设计
2.1
问题描述
大部分两轮驱动移动机器人的轮轴中心和几何中心不完全重合,其结构如图3所示.
X
x
O
y
Y C
p
v d
ω
θ图3非完整移动机器人结构
图3中,C 为机器人的轮轴中心,P 为机器人主体的几何中心,d 为两者之间的距离,(x,y )T 为P 点
在X -Y 系中的坐标,θ为机器人运动方向和X 轴间夹角,v 和ω分别为机器人的线速度和角速度.由于此类机器人的轮轴中心C 和主体几何中心P 不重合,在驱动轮纯滚动、无滑动的情况下,该机器人模型受非完整约束,即
?
??˙x sin θ?˙y cos θ=dω,˙x cos θ+˙y sin θ=v.
(2)
此类机器人运动学模型为???˙x ˙y
˙θ???=???cos θd sin θ
sin θ?d cos θ01?
??[v
ω
].(3)
2.2
跟踪控制
为了描述本文队形控制算法,给出如下假设.假设1
虚拟机器人由领航机器人根据队形配
置矩阵生成,其几何中心与领航机器人几何中心的
距离为ρr ,角度为?r ,其运动方向与领航机器人方向一致,线速度和角速度与领航机器人相同,即v v =v l ,
ωv =ωl .
一组领航-跟随机器人的结构模型如图4所示.图中:R l 为领航机器人,R v 为虚拟机器人,R f 为跟随机器人,所有机器人的运动学模型相同;(x l ,y l ,θl )T 为领航机器人位姿,(x f ,y f ,θf )T 为跟随机器人位姿,机器人R f 的队形参数F f =[l ρr ?r ]T
.由图4可得虚
拟机器人的位姿R v 为
?
? ?
x v =x l ?ρr cos(θl +?r
),
y v =y l ?ρr sin(θl +?r ),
θv =θl .
(4)
第11期
张瑞雷等:一类非完整移动机器人编队控制方法
1753
R 1
R 2
R 3
R 4
R f R l
1
20
Y y l
y v
y f
O x f
x l
x v
X
R f
y e θf x e
R v θv
L ??ρ
r
R l
φ
r L ?θl
(a)
(b) -
图4一组机器人编队和领航-跟随对结构
定义如下坐标变换:
???x e y e θe
???=??
?cos θf sin θf 0
?sin θf cos θf 00
1
????
??x v ?x f y v ?y f θv ?θf
???.
(5)
其中:(x v ?x f ,y v ?y f ,θv ?θf )T 为图4中X -Y 坐标系下的跟随机器人R f 与虚拟机器人R v 的位姿误差,
(x e ,y e ,θe )T
为坐标变换后的机器人R f 的位姿误差.
对误差方程(5)求微分,并结合式(3)和(4),整理后可得如下误差系统:
? ? ?˙x e
=ωf y e ?v f +v v cos θe +ωv d sin θe ,˙y e =?ωf x e +v v sin θe +ωf d ?ωv d cos θe ,˙
θe =ωv ?ωf .
(6)
其中v f 和ωf 分别为跟随机器人的线速度和角速度.由此可见,本文将编队控制问题转化为跟随机器人对虚拟机器人的轨迹跟踪问题,通过构造误差系统,寻求合适的控制律v f 和ωf ,使误差一致渐近收敛到0(lim t →∞∣x e ∣=0,lim t →∞∣y e ∣=0,lim t →∞∣θe ∣=0),即?
? ?
v f
=v v cos θe +K x [x e ?d (1?cos θe )]?K θθe ωf ,ωf =ωv +v v [K y α(y e +d sin θe +K θθe )+(β/K θ)sin θe ].
(7)
其中:K x ,K y ,K θ,α,β为正常数.
定理1
假设领航机器人R l 的线速度v l >
0且v l ,ωl ,˙v l ,˙ωl 有界,跟随机器人R f 遵循控制率(7),
则式(6)描述的误差系统全局一致渐近稳定.
证明考虑如下Lyapunov 函数(V (x e ,y e ,θe ,t ),简写为V ):
V =(1+e ?t
){12[x e ?d (1?cos θe )]2
+12
[y e +
d sin θ
e +K θθe ]2
+1K y (1?cos θe )}.(8)显然,函数V 满足V ∞?V ?2V ∞,其中
V ∞=12[x e ?d (1?cos θe )]2+12[y e +d sin θe +K θθe ]2
+
1
K y
(1?cos θe ).因此,该Lyapunov 函数V 是正定的,渐小的.对式(8)求导,并将控制率(7)代入,整理可得
˙V =(1+e ?t ){
?K x [x e ?d (1?cos θe )]2?
v v K y K θα(y e +d sin θe +K θθe )2
?
βv v
K y K θ
sin 2θe +v v sin θe (y e +d sin θe +K θθe )?v v (α+β)sin θe (y e +d sin θe +K θθe )}
?e ?t {
12
[x e ?d (1?cos θe )]2+
12[y e +d sin θe +K θθe ]2
+1K y
(1?cos θe )},(9)若α+β=1,则有
˙V
=(1+e ?t ){?K x [x e ?d (1?cos θe )]2?v v K y K θα(y e +d sin θe +K θθe )2
?
βv v K y K θsin 2θe }?e ?t {12
[x e ?d (1?cos θe )]2+
12[y e +d sin θe +K θθe ]2
+1K y
(1?cos θe )}.(10)其中:K x ,K y ,K θ,α,β为正常数.由此可知,˙V
负定,因此当t →∞时,V 有界;进一步可知x e ,y e ,θe 有界,
并由v l ,ωl ,˙v l ,˙ωl 有界即v v ,ωv ,˙v v ,˙ωv 有界可得
¨V
=¨V ∞(1+e ?t )?2˙V e ?t +V e ?t 有界,其中
¨V ∞=?2K x [x e ?d (1?cos θe )](˙x e ?d sin θe ?˙θ
e )?sin θe
K y K θ
(2βv v cos θe ˙θe +β˙v v sin θe )?K y K θ(y e +
d sin θ
e +K θθe ){2αv v [˙y e +(K θ+d cos θe )˙θe ]+α˙v v (y e +d sin θe +K θθe )}.
因此˙V
是一致连续的.由Barbalat 引理可知,当t →∞时,˙V
→0,可推出x e →0,y e →0,θe →0. 3仿真与实验结果
Microsoft robotics developer studio 4可提供逼真的物理引擎和完备的接口,能够精确模拟现实环境中重力摩擦力等多种环境条件,也可将仿真数据导入Matlab 中进行分析,因此本文利用该软件设计仿真实验.选用两种机器人模型进行实验,分别为Pioneer3DX 和iRobot,测试算法的有效性和编队控制
精度性能,仿真场景如图5所示.iRobot Pioneer 3DX
图5仿真实验场景Pioneer 3DX 的d 参数为0.17m,iRobot 的d 参数
为0.01m,控制周期T 为50ms,其他相关控制器为:
1754
控制与决策
第28卷
K x =1.1,K y =1.2,K θ=0.7,α=0.4,β=0.6.
实验13个iRobot 机器人保持三角队形如图
6所示.
2
46
8
10
x /m
R 1R 2R 3
-4
-202
y /m
(a)
40
80
120
t /s
(b)
R R 21-R R 31
-1.01.5
0.559
60
61
0.01
0.030.05
/m
R 1R 2R 3
40
80
120
t /s
( )
c 0
0.20.40.60.81.0
/(m /s )
R 1R 2R 3
40
80120
t /s
(d)
-1012
/(r a d /s )
图6三角形编队实验
编队轨迹如图6(a)所示,主领航机器人为R 1,跟随机器人R 2和R 3快速完成编队,并跟随R 1保持编
队.各跟随机器人的编队误差为√
x e 2+y e 2,如图6(b)所示,可以看出多机器人系统在较短时间内(<
5.0s )成功地形成编队,并以较小的误差(<0.05m )保
持队形,较大的初始误差是由于各跟随机器人的初始位置远离队形配置位置导致的.各机器人的控制输入线速度和角速度如图6(c)和图6(d)所示.领航机器人的线速度和角速度控制量是时变的,当跟随机器人在外侧时线速度较大,在内侧时线速度较小,各跟随机器人的角速度与领航机器人基本相同.
实验25个Pioneer3DX 机器人保持T 形队形,
如图7所示.
y /m
( )
c (d)
/(r a d /s )
R 1R 2R 3R 4R 5
510
x /m (a)
-6
-226
1.50.5
1.0 /m
50
100
t /s
(b)
00.5
1.01.5
10-3
100
100.05
99.95R R 21
-R R 31-R R 41-R R 53
-50
100
t /s
50
100
t /s
0.20.40.60.81.0
/(m /s )
-2-1012
R 1R 2R 3R 4R 5
R 1R 2R 3R 4R 5
图7T 形编队实验
编队轨迹如图7(a)所示,跟随机器人在主领航机器人R 1带领下做圆周运动.由图7(b)可以看出多机器人系统在较短时间内(<5.0s )成功地完成编队,并非常准确地保持队形,误差在完成编队后很小(<0.01m ).各机器人的控制输入线速度和角速度如图7(c)和图7(d)所示.由于领航机器人R 1的线速度和角速度控制量是常量,各跟随机器人的跟踪精度比实验1要高.稳态时,机器人R 1,R 3和R 5的线速度相同,R 4走外圈线速度较大,R 2走内圈线速度较小,5个机器人角速度相同.
实验3
两种机器人Pioneer3DX 和iRobot 组
成混合编队,并实现队形的动态切换.
第11期
张瑞雷等:一类非完整移动机器人编队控制方法
1755
x /m
y /m
(a)
t /s
(b)
/m
20
4060
80
0100200
300400
R 1R 2R 3R 4R 5
R R 21-R R 31-R R 41-R R 51
-0
510
151
23图8混合编队实验
编队轨迹如图8(a)所示,5个机器人由初始位置先完成柱形编队行驶一段时间后切换为三角形编队,最后切换为线性编队.由图8(b)可知,机器人能在较短时间内(<10.0s )平滑地完成队形切换,说明该算法具有良好的动态性能,并可适用于不同参数两轮差动机器人完成混合编队控制,并具有较高的编队精度.
4结论
本文提出了一种针对轮轴中心与几何中心不重合的非完整移动机器人动态编队方法.将非完整移动机器人的编队控制问题分解为控制领航机器人和控制编队中的跟随机器人两个子问题,运用队形参数矩阵确立多机器人之间的相对位置关系,并通过配置不同的参数矩阵改变编队队形,实现了多机器人队形变换.利用MRDS4软件搭建仿真平台,由仿真实验结果可以看出,本文提出的控制算法可靠性好,保持编队时具有较高的精度,能在较短时间内顺利完成队形变换.
参考文献(References )
[1]
Tucker Balch,Ronald C Arkin.Behavior-based formation control for multirobot teams[J].IEEE Trans on Robotics
and Automation,1998,14(6):926-939.[2]
Jakob Fredslund,Maja J Mataric.A general algorithm for robot formations using local sensing and minimal communication[J].IEEE
Trans
on
Robotics
and
Automation,2002,18(5):837-846.
[3]
Wei Ren,Nathan Sorensen.Distributed coordination architecture for multi-robot formation control[J].Robotics and Autonomous Systems,2008,56(4):324-333.
[4]Dongbing Gu,Huosheng Hu.A model predictive controller for robots to follow a virtual leader[J].Robotica,2009,27(6):905-913.
[5]Rongxin Cui,Shuzhi Sam Ge,Bernard V oon En How.Leader-follower formation control of underactuated autonomous underwater vehicles[J].Ocean Engineering,
2010,37(17/18):1491-1512.[6]
Jawhar Ghomman,Hasan Mehrjerdi,Maarouf Saad.Formation path following control of unicycle-type mobile robots[J].Robotics and Autonomous Systems,2010,58(5):727-736.[7]
Hasan Mehrjerdi,Jawhar Ghomman,Maarouf Saad.Nonlinear coordination control for a group of mobile robots using a virtual structure[J].Mechatronics,2011,21(7):1147-1155.[8]
Luca C,Fabio M,Domenico P.Leader-follower formation control of nonholonomic mobile robots with input constraints[J].Automatica,2008,44(5):1343-1349.[9]
Jaydev P Desai,James P Ostrowski,Vijay Kumar.Modeling and control of formations of nonholonomic mobile robots[J].IEEE Trans on Robotics and Automation,2001,17(6):905-908.
[10]Tove Gustavi,Xiaoming Hu.Observer-based leader-following formation control using onboard sensor information[J].IEEE Trans on Robotics,2008,24(6):1457-1462.
[11]Shao J,Xie G,Wang L.Leader-following formation
control of multiple mobile vehicles[J].Control Theory &Applications,2007,1(2):545-552.
[12]Yang Li,Cao Zhiqiang,Tan Min.Dynamic formation
control for multiple robots in uncertain environments[J].Robot,2010,32(2):283-288.
多移动机器人编队控制
基于Multi-Agent的多机器人编队控制 摘要:多移动机器人协调是当前机器人技术的一个重要发展方向。多移动机器人之间的协调与 合作将大大提高机器人行为的智能化程度,完成由单个机器人难以完成的更加复杂的作业。多 移动机器人协调技术的研究对提高机器人的智能化水平及加快机器人的实用化进程具有重要的 理论研究意义和实用价值。本文结合多智能体技术对多机器人编队控制进行了研究,同时根据 具体的多机器人系统,进行了仿真实验。验证了多智能体技术在机器人编队控制系统中的应用,完成了小规模的编队控制。 关键词:多智能体;多机器人;编队控制;协调控制;模糊控制 Multi-robot Formation Control Based on Multi - Agent Abstract :The problem of multi-robot cooperation and coordination is central to mobile robotics. Cooperation and coordination will improve the intelligent performance of robots and can complete lots of impossible missions for single robot.The research on multi-robot cooperation and coordination is of great academic and applied significance. The multi-robot formation is developed combined with the multi-agent technology in this dissertation, and the simulation is done with the multi-robot system. The application of multi-agent is verified in the multi-robot formation control through a small system adopt the fomation control. Key words: Multi-agent ;Multi-robot ;Formation control;Coordination control;Fuzzy control 1. 国内外机器人系统发展现状 自80年代末以来,基于多智能体系统理论研究多机器人协作受到了普遍的关注,从军事领域到工业与民用领域,从星际探险到海底考察,从比赛到教学,都取得了不同程度的进步。近年来,在IEEE R&A,IROS等著名的国际机器人学术会议上,几乎每次会议都有多智能体协作机器人系统的专题。一些机器人学术刊物出版了有关多智能体机器人的研究专辑。一些研究项目,如ACTRESS,CEBOT,GOFER,SWARM等,已进行了多年[1]。 目前,国内关于群体机器人系统的研究刚刚起步,基本上还处于基础技术的研究阶段,这方面的研究成果报道比较少。中科院沈阳自动化所机器人开放研究实验室是国内研究多机器人技术较早也较全面的科研单位。 (1)CEBOT(Cellular Robotic System) CEBOT是一种自重构机器人系统(Self-Reconfigurable Robotic System),它的研究是受生物细胞结构的启发,将系统中众多的具有相同和不同功能的机器人视为细胞元,这些细胞元可以移动,寻找和组合。 根据任务或环境的变化,细胞元机器人可以自组织成器官化机器人,多个器官化机器人可以进一步自组织,形成更加复杂的机器人系统。细胞结构机器人系统强调是单元体的组合如何根据任务和环境的要求动态重构。因此,系统具有多变的构型,可以具有学习和适应的系统智能(Group Intelligence),并具有分布式的体系结构[3]。 (2)ALLANCE/L-ALLANCE系统
复杂环境下多移动机器人协同路径规划
复杂环境下多移动机器人协同路径规划 多移动机器人协同路径规划是机器人导航研究领域中极具挑战性的问题。复杂环境下多移动机器人协同路径规划,需要为各机器人寻求一条从起始点到目标点的最优路径,同时保证机器人间以及机器人与动、静态障碍物之间无碰撞。因此,如何实现机器人间的避碰和机器人与动态障碍物的避障是该问题的研究难点。当前大部分研究仍聚集于静态环境下单机器人路径规划,复杂环境下多移动机器人协同路径规划问题仍是亟待解决的难题。本文主要工作如下:1)针对单机器人全局路径规划问题,采用约束满足法构建优化数学模型,并结合问题属性提出一种改进蚁群算法。利用当前节点的局部路径方向与起始点至终点的欧式路径方向夹角设计新启发式函数,引导机器人沿最短路径行走;根据可选节点数量设计避障规则,提高避障能力;依据路径长度对信息素进行比较更新,提高算法收敛速度。实验表明,改进算法性能优于原始蚁群算法。2)针对静态环境下多移动机器人协同路径问题,构建以路径长度短和暂停时间少为目标的多目标数学模型。考虑到机器人之间存在碰撞冲突,研究启发式规则对冲突进行消除。以单机器人全局路径规划为基础,研制出一种基于全局路径规划和融入启发式规则的局部路径调整的两阶段规划算法求解该问题,仿真实验表明了该算法的有效性。3)针对动态环境下多移动机器人协同路径规划问题,基于静态环境下多移动机器人路径规划的研究成果,根据动态障碍物的运动性质研究避障方法,消除机器人与动态障碍物的碰撞冲突。设计了相应的仿真实验,结果表明了该方法的有效性。4)考虑
到企业的实际需要,设计了多移动机器人协同路径规划系统。该系统具有较好的集成性和开放性,提供了用户登录、用户管理、单机器人调度方案和多机器人调度方案等交互界面,满足用户在不同运行环境下的需要。
基于改进人工势场的多机器人编队控制
基于改进人工势场的多机器人编队控制 人工势场法应用到多自主体编队路径规划中,会出现局部最优,无法继续向目标前进,目标不可达的情况;针对这一问题文章提出了“基于队形变换的沿墙导航法”。当机器人遇到障碍陷入局部最优时,通过将机器人队形变形,并使用沿墙法让机器人绕过障碍物,之后通过人工势场法使机器人到达目标位置,从而解决了局部最优的问题。仿真结果表明提出方法的可行性和有效性。 标签:多移动机器人;队形控制;人工势场法;淘汰算法 1 概述 近年来,多自主体编队已经成为多机器人系统研究领域中最重要的问题之一[1]。人工势场法应用到多自主体编队路径规划存在明显的缺陷,例如算法容易陷入局部最优,无法继续向目标前进,目标不可达;已经有一些方法来解决势场法的这个缺陷。对于形状不规则的障碍物形,我们可以把它看成凸多边形。但是,该方法在实际使用的过程中需要对障碍物的形状进行有效的估计和矫正,存在较大难度,并且多自主体编队在遇到障碍物时,特别是容易陷入局部最优障碍物的时候,继续保持编队的队形已经不是当前最主要的问题。所以我们提出“基于队形变换的沿墙导航法”来解决局部存在最优的问题。当机器人和障碍物之间的距离比较小的时候,队形将变回一字型。实验结果表明,该方法用来解决多机器人队形形成问题的有效性。 2 系统实现 2.1 淘汰法 2.2 人工势场的设计 人工势场算法中,多自主体的运动是在虚拟势场产生的力的作用下被从起点牵引到终点,产生这种力的势场称为的引力场。在自主体运动环境中,会存在着一些障碍物,这些所存在的障碍物被叠加一种可以使得多自主体朝着背离障碍物方向运动相反的势场力,这样就可以实现避障。 在多自主体的运动中,不仅需要考虑机器人的避障,而且还需要考虑机器人的避碰问题。将机器人之间的作用力表示为Uij。 Uij应当满足以下几个条件:(1)当dij→0时,Uij(‖dij‖→∞);(2)当个体i和j之间的距离达到所期望值时,Uij最小,则系统势能最小;(3)Uij在接近rij=R附近递增。由Uij应当满足的几点条件,可以选择一个在rij=d处的分段函数。当个体间的最小距离超过d时侯,就不存在相互作用,Uij的表达式如下所示。
多机器人编队控制技术
多机器人编队控制技术综述 摘要:机器人作为人类20世纪最伟大的发明之一,在短短的40年内发生了日新月异的变化。而随着人类生产规模的不断扩大,人类活动范围的不断扩大,仅仅靠人力进行生产活动已经不能满足先进生产力的要求。因此,代替人类进行生产、探索活动的多机器人系统应运而生。当今,多机器人系统的应用范围大致有如下几项:远地作业、协助军事行动、震后搜索与营救、自动仓库管理、自动化工厂、农业机器人等。本文通过对多机器人编队控制技术的综述,来展现多机器人系统的发展现状以及广阔的应用空间。 关键字:多机器人系统、编队控制、算法、仿真技术 1.绪论 1.1问题的提出与研究的意义 由生物体进行,外部可以觉察到并且有适应意义的活动,称之为生物的行为。 通过模仿生物行为来发展的技术学科我们称之为仿生学[1]。所谓群体机器人技术,就是利用仿生学原理,模仿群体活动的动物或昆虫运动的特点,来制造可以运用于工程、医学以及军事领域的机器人[2]。随着生物学研究的不断深入,研究人员发现它们能够通过简单的局部交互产生复杂的群体智能行为。。研究人员意识到理解这些社会性昆虫系统级特征一一个体失效的鲁棒性、环境变化的适应性、群体规模的可扩充性,将为多机器人系统实现类似期望能力提供思路。生物学
家、计算机学家及机器人专家共同合作,希望能够利用社会性昆虫的群体行为理论设计和控制多个机器人。于是产生了基于多学科交叉的新研究领域一一群体机器人[3]。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。然而就目前的机器人技术水平而言,单机器人在信息的获取、处理及控制能力等方面都是有限的,对于复杂的工作任务及多变的工作环境,单机器人的能力更显不足。于是人们考虑由多个机器人组成的群体系统通过协调、协作来完成单机器人无法或难以完成的工作,通常称之为群体机器人。群体机器人系统比单机器人系统具有更强的优越性。主要表现在以下几个方面: (1)相互协调的n个机器人系统的能力可以远大于一个单机器人系统的n 倍,群体机器人系统还可以实现单机器人系统无法实现的复杂任务。 (2)设计和制造多个简单机器人比单个复杂机器人更容易、成本更低。 (3)使用群体机器人系统可以大大节约时间,提高效率。 (4)群体机器人系统的平行性和冗余性可以提高系统的柔性和鲁棒性[4]。 2.多机器人系统编队控制 2.1多机器人系统的分析 对于多机器人系统,编队控制是必须解决的难题,它直接影响着
移动机器人路径规划技术综述
第25卷第7期V ol.25No.7 控制与决策 Control and Decision 2010年7月 Jul.2010移动机器人路径规划技术综述 文章编号:1001-0920(2010)07-0961-07 朱大奇,颜明重 (上海海事大学水下机器人与智能系统实验室,上海201306) 摘要:智能移动机器人路径规划问题一直是机器人研究的核心内容之一.将移动机器人路径规划方法概括为:基于模版匹配路径规划技术、基于人工势场路径规划技术、基于地图构建路径规划技术和基于人工智能的路径规划技术.分别对这几种方法进行总结与评价,最后展望了移动机器人路径规划的未来研究方向. 关键词:移动机器人;路径规划;人工势场;模板匹配;地图构建;神经网络;智能计算 中图分类号:TP18;TP273文献标识码:A Survey on technology of mobile robot path planning ZHU Da-qi,YAN Ming-zhong (Laboratory of Underwater Vehicles and Intelligent Systems,Shanghai Maritime University,Shanghai201306, China.Correspondent:ZHU Da-qi,E-mail:zdq367@https://www.360docs.net/doc/c717858276.html,) Abstract:The technology of intelligent mobile robot path planning is one of the most important robot research areas.In this paper the methods of path planning are classi?ed into four classes:Template based,arti?cial potential?eld based,map building based and arti?cial intelligent based approaches.First,the basic theories of the path planning methods are introduced brie?y.Then,the advantages and limitations of the methods are pointed out.Finally,the technology development trends of intelligent mobile robot path planning are given. Key words:Mobile robot;Path planning;Arti?cial potential?eld;Template approach;Map building;Neural network; Intelligent computation 1引言 所谓移动机器人路径规划技术,就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务.移动机器人路径规划主要解决3个问题:1)使机器人能从初始点运动到目标点;2)用一定的算法使机器人能绕开障碍物,并且经过某些必须经过的点完成相应的作业任务;3)在完成以上任务的前提下,尽量优化机器人运行轨迹.机器人路径规划技术是智能移动机器人研究的核心内容之一,它起始于20世纪70年代,迄今为止,己有大量的研究成果报道.部分学者从机器人对环境感知的角度,将移动机器人路径规划方法分为3种类型[1]:基于环境模型的规划方法、基于事例学习的规划方法和基于行为的路径规划方法;从机器人路径规划的目标范围看,又可分为全局路径规划和局部路径规划;从规划环境是否随时间变化方面看,还可分为静态路径规划和动态路径规划. 本文从移动机器人路径规划的具体算法与策略上,将移动机器人路径规划技术概括为以下4类:模版匹配路径规划技术、人工势场路径规划技术、地图构建路径规划技术和人工智能路径规划技术.分别对这几种方法进行总结与评价,展望了移动机器人路径规划的未来发展方向. 2模版匹配路径规划技术 模版匹配方法是将机器人当前状态与过去经历相比较,找到最接近的状态,修改这一状态下的路径,便可得到一条新的路径[2,3].即首先利用路径规划所用到的或已产生的信息建立一个模版库,库中的任一模版包含每一次规划的环境信息和路径信息,这些模版可通过特定的索引取得;随后将当前规划任务和环境信息与模版库中的模版进行匹配,以寻找出一 收稿日期:2009-08-30;修回日期:2009-11-18. 基金项目:国家自然科学基金项目(50775136);高校博士点基金项目(20093121110001);上海市教委科研创新项目(10ZZ97). 作者简介:朱大奇(1964?),男,安徽安庆人,教授,博士生导师,从事水下机器人可靠性与路径规划等研究;颜明重(1977?),男,福建泉州人,博士生,从事水下机器人路径规划的研究.
一类非完整移动机器人编队控制方法_张瑞雷
第28卷第11期V ol.28No.11 控制与决策 Control and Decision 2013年11月 Nov.2013一类非完整移动机器人编队控制方法 文章编号:1001-0920(2013)11-1751-05 张瑞雷,李胜,陈庆伟 (南京理工大学自动化学院,南京210094) 摘要:针对大部分两轮非完整移动机器人轮轴中心与几何中心不重合的特点,提出一种多机器人协调编队控制算法.构造队形参数矩阵确定编队形状,根据领航机器人和相关队形参数生成虚拟机器人,把编队控制分解为跟随机器人对虚拟机器人的轨迹跟踪.建立虚拟机器人与跟随机器人之间误差系统模型,利用Lyapunov理论设计相应控制器,从而实现队形保持和变换.应用microsoft robotics developer studio4(MRDS4)搭建3D仿真平台,设计3组实验,结果进一步验证了所提出方法的有效性. 关键词:非完整移动机器人;轨迹跟踪;编队控制;队形变换 中图分类号:TP273文献标志码:A Formation control for a kind of nonholonomic mobile robots ZHANG Rui-lei,LI Sheng,CHEN Qing-wei (School of Automation,Nanjing University of Science and Technology,Nanjing210094,China.Correspondent: ZHANG Rui-lei,E-mail:zhangrelay@https://www.360docs.net/doc/c717858276.html,) Abstract:For the problem that the wheel-axle center and the geometric center of the most nonholonmic mobile robot are noncoincidence,the formation coordination control algorithm is proposed in this paper.The shape of formation is determined by the parameter matrix and the virtual robot is generated according to the lead robot and related formation parameters, translating the formation control problem into the trajectory tracking problem between the follow robot and virtual robot. The error system model between two robots is built,and the control algorithm is designed by using the Lyapunov theory for the formation keeping and transforming.Three groups of experiment are designed by the microsoft robotics developer studio 4,and the simulation results show the effectiveness of the presented method. Key words:nonholonomic mobile robot;trajectory tracking;formation control;formation transform 0引言 近年来,机器人的协调控制成为多机器人系统研究的热点.多机器人通过协调能完成某些单个机器人不能完成的任务,通常有更高的效率.编队控制是一个典型的多机器人协调问题,在地理勘测、侦查、救援、扫雷和运输等领域具有广阔的应用前景.目前,多机器人的编队控制算法主要包括基于行为的方法[1-2]、虚拟结构法[3-4]和领航-跟随法[9-12]. 文献[2]研究了一组仅有局部感知和少量通讯的分布式机器人,通过全局行为的队形控制方法,实现了多机器人编队的建立和保持.文献[3]针对通信范围和带宽限制,基于虚拟结构法,提出了一种统一的分布式编队控制结构,结合一致性理论和轨迹跟踪,实现了多机器人编队拓扑的切换和控制.文献[4]提出了一种基于模型预测控制方法的编队控制器,并将其用于跟踪虚拟领航机器人.文献[5]将领航-跟随方法应用于潜水器领域.文献[6-8]研究了一类控制输入受约束非完整移动机器人的编队控制问题.文献[9]将编队控制问题分解为轨迹跟踪、机器人控制和队形控制3个子问题,通过l-?和l-l控制,采用输入输出反馈线性化方法实现了多机器人的编队控制.文献[10]通过在跟随机器人上安装观测器来估计领航机器人速度,仅依靠通信位置信息实现编队控制,但编队精度较差,领航机器人做复杂运动时,编队保持不理想. 非完整约束机器人在纯滚动、无滑动的情况下,使用反馈线性化的队形控制方法需要选定离轴点,该点位于机器人的前进方向,与质心有一定的偏移量, 收稿日期:2012-09-17;修回日期:2012-12-25. 基金项目:国家自然科学基金项目(60975075,61074023). 作者简介:张瑞雷(1985?),男,博士生,从事机器人智能控制、多机器人协调控制的研究;陈庆伟(1963?),男,教授,博士生导师,从事智能控制与智能系统等研究.
移动机器人路径规划技术的现状与发展
移动机器人路径规划技术的现状与发展 现阶段,移动机器人技术是科学领域研究的一个重点内容,而在该技术的研究中,移动机器人的路径规划技术是非常重要的。其中,路径规划可以被划分成两种,其一是基于模型环境进行的已知的全局路径进行规划,其二是基于传感器环境对未知局部路径进行规划。文章对移动机器人的路径规划方法进行了详细的分析,并分别列举了全局路径规划以及局部路径规划的具体规划方法,并对该技术未来的发展进行展望。 标签:移动机器人;路径规划;神经网络;栅格法 1 移动机器人路径规划技术的分类 按照机器人对周围环境信息的识别与对信息的掌握程度以及对不同种类障碍物的识别进行分类,可将机器人路径规划分成四类:第一类,在已知的比较熟悉的环境中,根据静态障碍物的位置对移动机器人的路径进行规划;第二类,在未知的比较陌生的环境中根据静态障碍物的位置对移动机器人的路径进行规划;第三类,在已知的比较熟悉的环境中,根据动态障碍物的运行状态对移动机器人的路径进行规划;第四类,在未知的比较陌生的环境中,根据动态障碍物的运行状态对移动机器人的路径进行规划。根据机器人对周围环境的掌握能力不同,可以对路径规划技术进行划分,第一类是在对周围环境信息已经验证的基础上对移动机器人的的路径进行规划,所规划的路径为全局路径;第二类是基于傳感器信息的基础上对机器人的路径进行规划,规划的路径为局部路径[1]。移动机器人的路径规划方法一般可以划分成两大类型,即传统方法与智能方法。 2 全局路径规划方法 2.1 拓扑法 该路径规划的方法主要就是把所规划的空间进行分割,并形成具有拓扑特点的子空间,同时构建拓扑网络,并在其中探索出起点至终点的详细拓扑路径,然后根据拓扑路径的路径规划得到最终需要的几何路径。拓扑路径的规划方法是以降维法为主要依据,也就是,将高维的比较复杂的空间几何路径求法转化为低维的比较简单的拓扑空间的辨别连通方法。这种方法的最明显优势就是对拓扑特点进行充分利用,进而有效地减小实际搜索的空间范围[2]。而其算法的复杂程度则只是同障碍物数目有较大关系,所以,最主要的问题就是在障碍物数量增加的情况下,采取合理措施对已有拓扑网络进行修正,并实现图形速度提升的目的。 2.2 可视图法 这种路径规划的方法就是将机器人看做是一个点,然后进行合理组合,并将机器人与目标点、多边形障碍物的各顶点相连。在连接点的过程中,需要保证直线可视,也就是目标点与多边形障碍物的各顶点以及各个障碍物顶点间的连线不
基于PlayerGazebo的移动机器人路径规划仿真实现
龙源期刊网 https://www.360docs.net/doc/c717858276.html, 基于Player/Gazebo的移动机器人路径规划仿真实现 作者:郝萍萍姚立峰 来源:《教育界》2010年第10期 [摘要]利用Player/Gazebo可以在3D环境中对单个或多个移动机器人的定位、路径规划、建图等导航算法进行高效的仿真。本文在简介Player/Gazebo仿真环境的基础上,对移动机器人路径规划进行了讨论,利用Player/Gazebo的服务器/客户端模式,实现了对移动机器人路径规划的仿真,提高了机器人路径规划研究的效率。 [关键词]Player/Gazebo移动机器人仿真 1.引言 移动机器人技术是当今信息技术中最热门的领域,涉及感知、建模、导航、控制等各个方面。其中,路径规划是移动机器人自主导航的基本要求之一,它使机器人在已知或未知环境中由一个初始配置自主移动到一个终点配置。随着计算机技术的发展,移动机器人仿真成为现今机器人导航技术研究的重要手段。研究人员可以在虚拟环境中对机器人进行建模和控制,模拟仿真各种现实环境和突发状况,避免在复杂环境下现场试验的困难并降低实际运行的成本。Player/Stage/Gazebo是应用最广泛的机器人控制仿真平台之一,利用Gazebo的三维仿真环境,人们可以清楚地看到机器人在环境中的运行状况,极大的方便了机器人导航算法的研究。本文在介绍Player/Stage/Gazebo仿真平台的基础上,以移动机器人路径规划为例,详细论述了如何建立移动机器人的运行环境和三维模型,并对机器人的路径规划控制进行了仿真。结果表明该仿真环境可以真实有效的模拟移动机器人的运动和动力学特性、各种传感器以及机器人运动规划控制,必将进一步促进移动机器人的自主导航研究。 2.Player/Stage/Gazebo简介 Player/Stage/Gazebo是目前全世界应用最广泛的机器人仿真开发平台之一。 Player/Stage/Gazebo仿真平台包括机器人设备接口Player、2D多机器人仿真环境Stage以及3D 多机器人仿真环境Gazebo三部分。其中,Player采用基于TCP的客户端,服务器模式,为各
多机器人路径规划研究方法(一)
多机器人路径规划研究方法(一) 张亚鸣雷小宇杨胜跃樊晓平瞿志华贾占朝摘要:在查阅大量文献的基础上对多机器人路径规划的主要研究内容和研究现状进行了分析和总结,讨论了多机器人路径规划方法的评判标准,并阐述了研究遇到的瓶颈问题,展望了多机器人路径规划方法的发展趋势。 关键词:多机器人;路径规划;强化学习;评判准则 e,itexpoundedthebottleneckofthepathplanningresearchfor , ; 近年来,分布式人工智能(DAI)成为人工智能研究的一个重要分支。DAI 研究大致可以分为DPS (distributedproblemsolving )和MAS ()两个方面。一些从事机器人学的研究人员受多智能体系统研究的启发,将智能体概念应用于多机器人系统的研究中,将单个机器人视做一个能独立执行特定任务的智能体,并把这种多机器人系统称为多智能体机器人系统(MARS)。因此,本文中多机器人系统等同于多智能体机器人系统。目前,多机器人系统已经成为学术界研究的热点,而路径规划研究又是其核心部分。
机器人路径规划问题可以建模为一个带约束的优化问题,其包括地理环境信息建模、路径规划、定位和避障等任务,它是移动机器人导航与控制的基础。单个移动机器人路径规划研究一直是机器人研究的重点,且已经有许多成果 1~3],例如在静态环境中常见的有连接图法、可视图法、切线图法、Voronoi 图法、自由空间法、栅格法、拓扑法、链接图法、证据理论建图等;动态环境中常见的有粒子群算法、免疫算法、遗传算法、神经网络、蚁群算法、模拟退火算法、人工势场法等。然而,多机器人路径规划研究比单个机器人路径规划要复杂得多,必须考虑多机器人系统中机器人之间的避碰机制、机器人之间的相互协作机制、通信机制等问题。 1 多机器人路径规划方法单个机器人的路径规划是找出从起始点至终点的一条最短无碰路径。多个机器人的路径规划侧重考虑整个系统的最优路径,如系统的总耗时间最少路径或是系统总路径最短等。从目前国内外的研究来看,在规划多机器人路径时,更多考虑的是多机器人之间的协调和合作式的路径规划。 目前国内外多机器人路径规划研究方法分为传统方法、智能优化方法和其他方法三大类。其中传统方法主要有基于图论的方法(如可视图法、自由空间法、栅格法、Voronoi 图法以及人工势场方法等);智能优化方法主要有遗传算法、蚁群算法、免疫算法、神经网络、强化学 习等;其他方法主要有动态规划、最优控制算法、模糊控制等。它们中的大部分都是从单个机器人路径规划方法扩展而来的。 1)传统方法多机器人路径规划传统方法的特点主要体现在基于图论的基础
多机器人路径规划研究方法(一)
多机器人路径规划研究方法(一) 张亚鸣雷小宇杨胜跃樊晓平瞿志华贾占朝 摘要:在查阅大量文献的基础上对多机器人路径规划的主要研究内容和研究现状进行了分析和总结,讨论了多机器人路径规划方法的评判标准,并阐述了研究遇到的瓶颈问题,展望了多机器人路径规划方法的发展趋势。 关键词:多机器人;路径规划;强化学习;评判准则 e,itexpoundedthebottleneckofthepathplanningresearchfor, ; 近年来,分布式人工智能(DAI)成为人工智能研究的一个重要分支。DAI 研究大致可以分为DPS(distributedproblemsolving)和MAS ()两个方面。一些从事机器人学的研究人员受多智能体系统研究的启发,将智能体概念应用于多机器人系统的研究中,将单个机器人视做一个能独立执行特定任务的智能体,并把这种多机器人系统称为多智能体机器人系统(MARS)。因此,本文中多机器人系统等同于多智能体机器人系统。目前,多机器人系统已经成为学术
界研究的热点,而路径规划研究又是其核心部分。 机器人路径规划问题可以建模为一个带约束的优化问题,其包括地理环境信息建模、路径规划、定位和避障等任务,它是移动机器人导航与控制的基础。单个移动机器人路径规划研究一直是机器人研究的重点,且已经有许多成果1~3],例如在静态环境中常见的有连接图法、可视图法、切线图法、Voronoi图法、自由空间法、栅格法、拓扑法、链接图法、证据理论建图等;动态环境中常见的有粒子群算法、免疫算法、遗传算法、神经网络、蚁群算法、模拟退火算法、人工势场法等。然而,多机器人路径规划研究比单个机器人路径规划要复杂得多,必须考虑多机器人系统中机器人之间的避碰机制、机器人之间的相互协作机制、通信机制等问题。 1多机器人路径规划方法 单个机器人的路径规划是找出从起始点至终点的一条最短无碰路径。多个机器人的路径规划侧重考虑整个系统的最优路径,如系统的总耗时间最少路径或是系统总路径最短等。从目前国内外的研究来看,在规划多机器人路径时,更多考虑的是多机器人之间的协调和合作式的路径规划。 目前国内外多机器人路径规划研究方法分为传统方法、智能优化方法和其他方法三大类。其中传统方法主要有基于图论的方法(如可视图法、自由空间法、栅格法、Voronoi图法以及人工势场方法等);智能优化方法主要有遗传算法、蚁群算法、免疫算法、神经网络、强化学