大连理工大学自动控制原理06真题

大连理工大学2006年硕士生入学考试
《自动控制原理(含20%线代)》试题
一.(15分)设无源网络如图所示,已知初始条件试求网络传递函数。
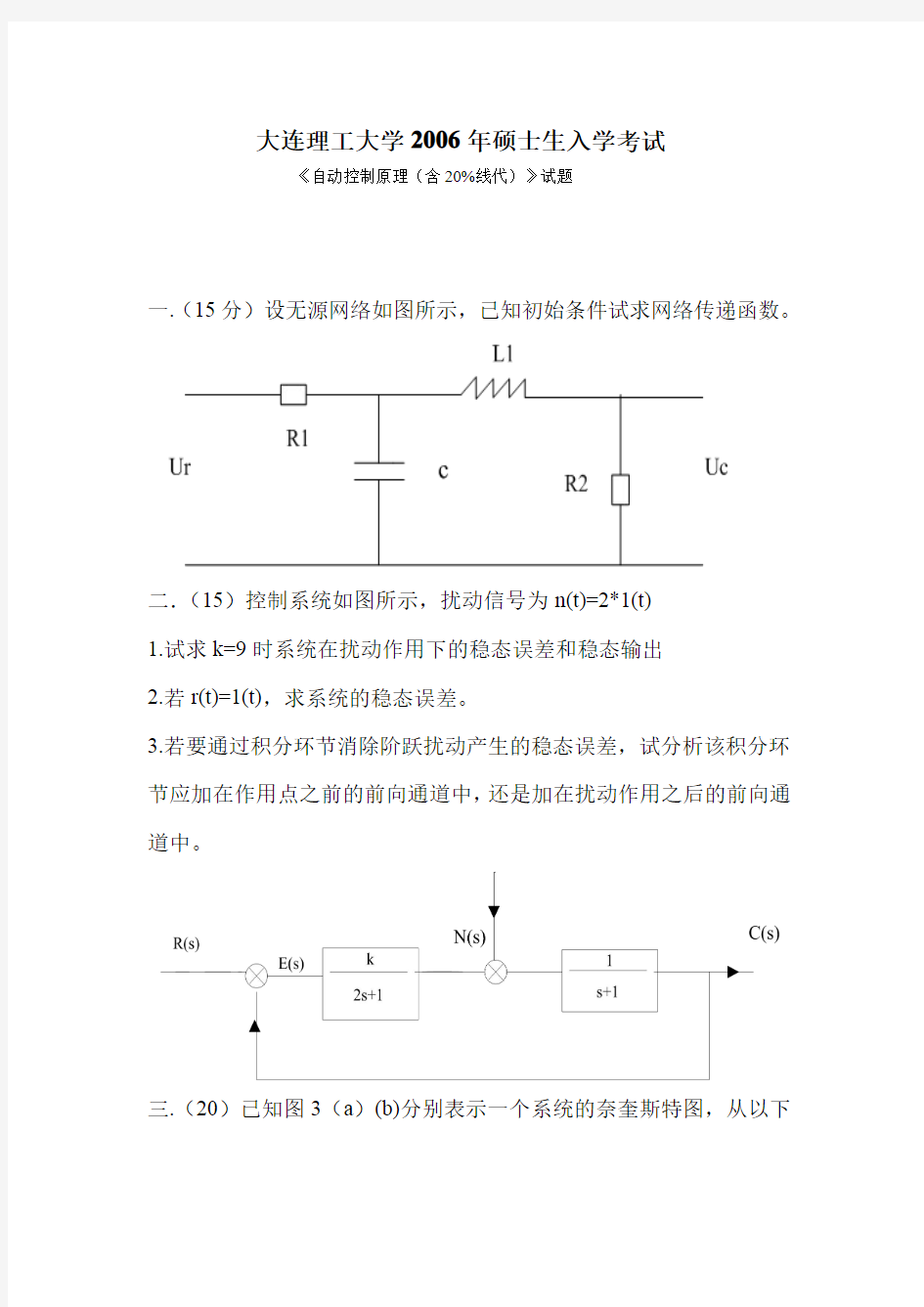
二.(15)控制系统如图所示,扰动信号为n(t)=2*1(t)
1.试求k=9时系统在扰动作用下的稳态误差和稳态输出
2.若r(t)=1(t),求系统的稳态误差。
3.若要通过积分环节消除阶跃扰动产生的稳态误差,试分析该积分环节应加在作用点之前的前向通道中,还是加在扰动作用之后的前向通道中。
三.(20)已知图3(a)(b)分别表示一个系统的奈奎斯特图,从以下
四个传递函数中找出他们各自对应的图,并画出补线,应用奈奎斯特图判据判断系统的稳定性。1.)
15.0()
1()(3++=s s s k s G 2.)105.0)(11.0()15.0)(1()(3++++=s s s s s k s G 3.)1()(Ts s k
s G -= 4.)1()(+=
Ts s k s G
四.设单位反馈系统的开环传递函数为2
)1()(++=
s s k s s G 1.绘制k 从0到无穷闭环根轨迹图2.当系统输入为r(t)=2t 时确定使系统稳态误差e<0.5的K 的范围。
五.已知负反馈系统开环传递函数为G(s)H(s)=
100++s s s 1.求系统的剪切频率w
2.绘制系统开环频率特性曲线对数坐标曲线
3.利用相位裕量判断系统的稳定性。
六.非线性系统如图所示
1.求非线性部分传递函数。
2.描述函数法分析系统存在自震时参数k 和h 应满足的条件。
七.采样系统的结构如图所示。
1.若采样系统T=1s 求系统的临界放大系数k
2.若采样系统T=1s 输入r(t)=t
求系统的稳态误差值。
八.线性定常系统的齐次状态方程为X(t)=A(t);
当X (0)=??????-41,其解为???
?????-=--t t e e t X 334)(当X(0)=??????-12,其解为X (t )=???????
?---t t e e 22
求此系统矩阵A.
九.线性定常系统状态空间表达式为
X=,101210u x ??????+??????-y=[]x
011.设计状态反馈矩阵使系统闭环极点为-1+j2,-1-j2。
2.若系统状态是可观测的,设计一个全维状态观测器并使观测器的极点为-4,-5
3.画出具有状态反馈和状态观测器的系统状态框图。
更多免费资料加微信Dovellr1314或直接扫描上方二维码