△ 解析空中三角测量
解析空中三角测量
Arshad Edited&Sheared 前言
此为开源Word版的摄影测量解析空中三角测量的学习笔记,希望亲爱的同学们,能再接再厉把这份文件做的更好,以方便更多的同学学习,从而为推动摄影测量学的发展贡献力所能及的力量。请将编辑后的文件及时发到百度文库共享。也欢迎把编辑后的版本我: hurricanblue@https://www.360docs.net/doc/c818177129.html,。
一.综述
1.前言
解析空中三角测量就是以像片上量测的像点坐标为依据,采用较严密的数学模型,按最小二乘法原理,用少量地面控制点为平差条件,用计算机解算测图所需地面控制点的空间坐标。要将空中摄站及影像放到整个的加密网中,起到点的传递和构网作用,故被称为空中三角测量。
应用
?提供定向控制点;
?部分取代大地测量野外控制点;
?用于地籍测量,建立坐标地籍;
?获得大量点地面坐标;
?解析法地面摄影测量。
目的
?地形测图的摄影测量加密;
?高精度摄影测量加密。
根据平差计算采用的数学模型:
航带法、独立模型法、光束法。
根据平差计算的范围:
单模型、单航带和区域网解析法。
摄影测量信息:
主要指在影像上量测的控制点、连接点的影像坐标。
非摄影测量信息:
主要指将空中三角测量网纳入到规定物方坐标系统所必须的基准信息。
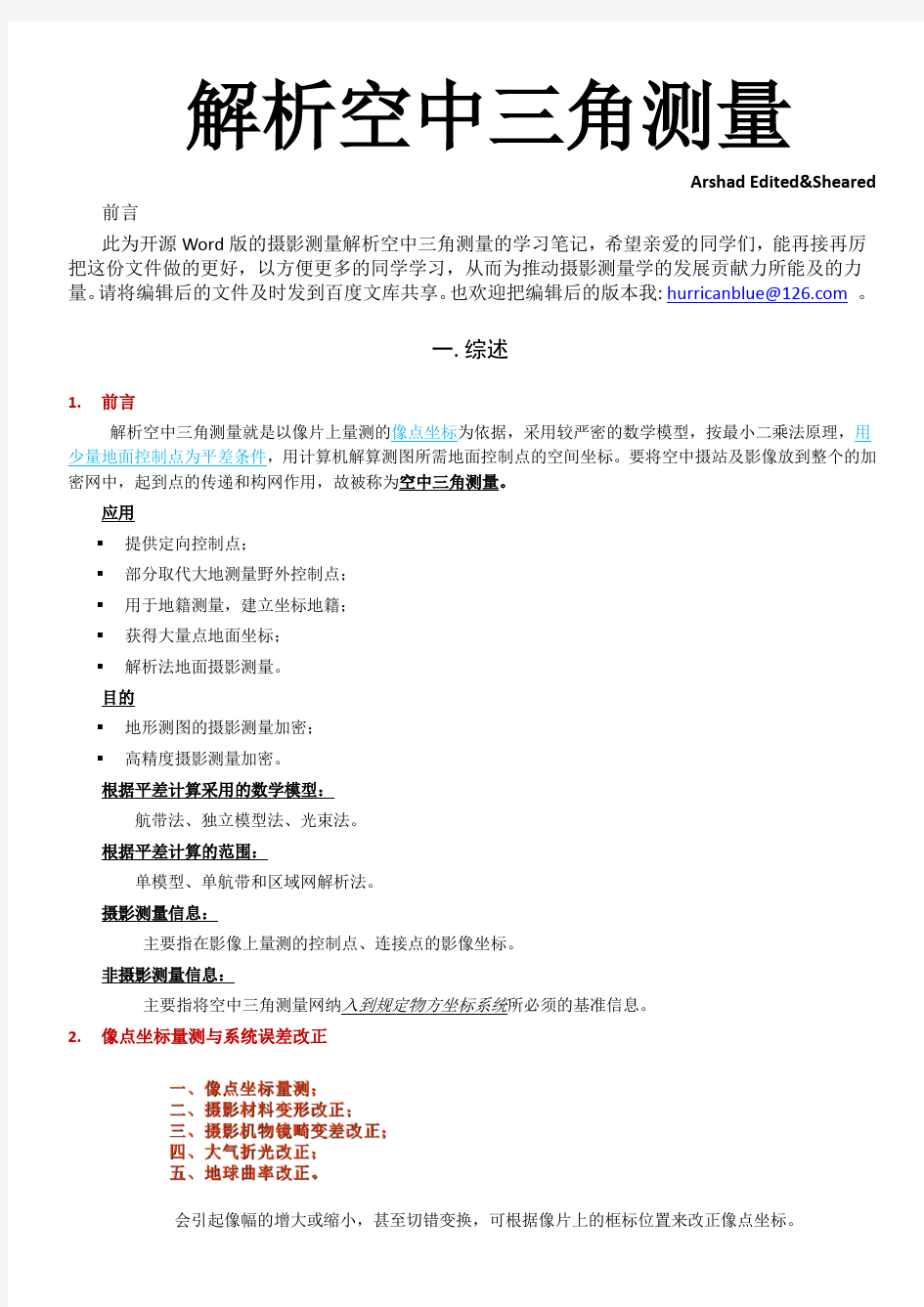
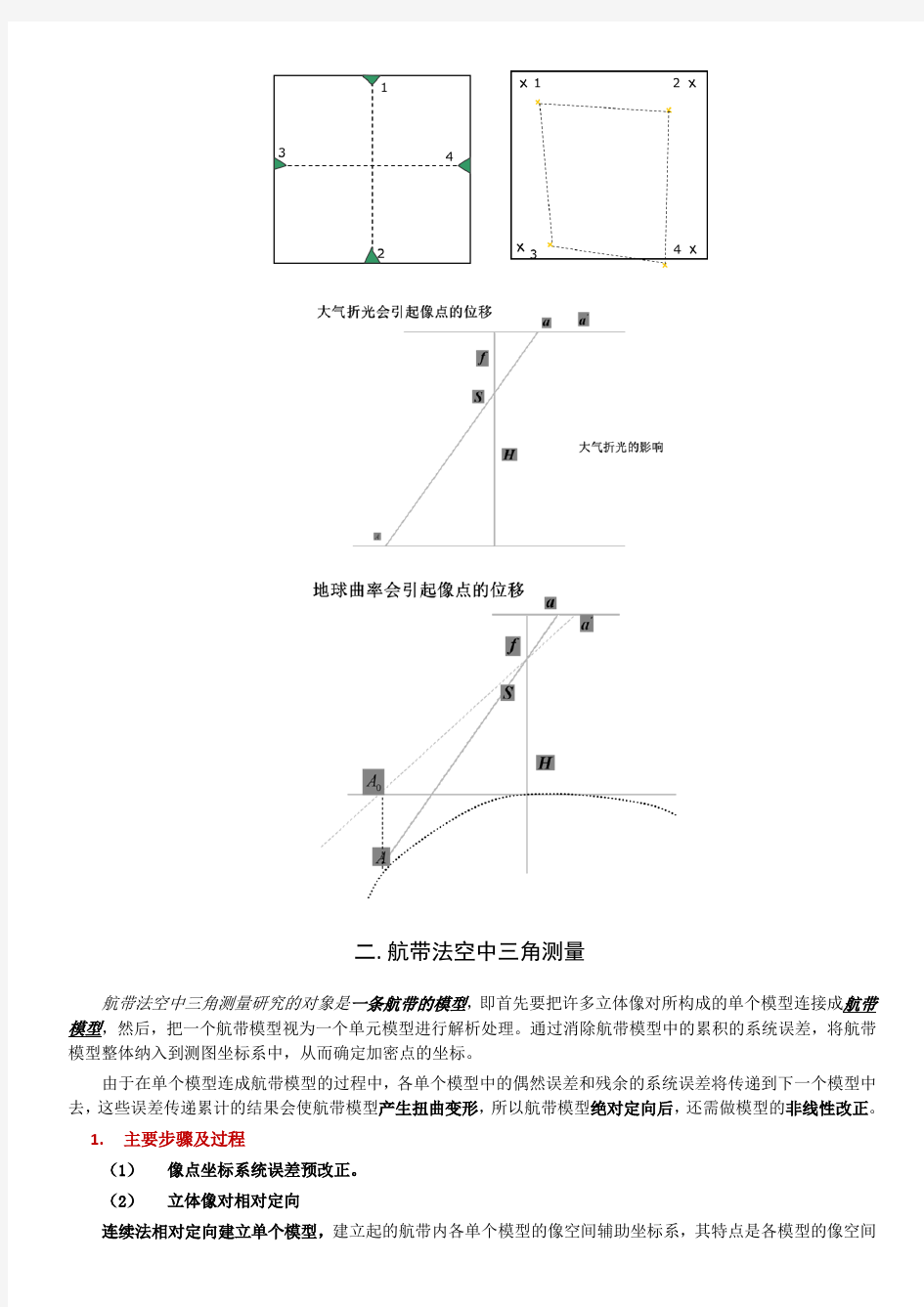
2.像点坐标量测与系统误差改正
会引起像幅的增大或缩小,甚至切错变换,可根据像片上的框标位置来改正像点坐标。
二.航带法空中三角测量
航带法空中三角测量研究的对象是一条航带的模型,即首先要把许多立体像对所构成的单个模型连接成航带模型,然后,把一个航带模型视为一个单元模型进行解析处理。通过消除航带模型中的累积的系统误差,将航带模型整体纳入到测图坐标系中,从而确定加密点的坐标。
由于在单个模型连成航带模型的过程中,各单个模型中的偶然误差和残余的系统误差将传递到下一个模型中去,这些误差传递累计的结果会使航带模型产生扭曲变形,所以航带模型绝对定向后,还需做模型的非线性改正。
1.主要步骤及过程
(1)像点坐标系统误差预改正。
(2)立体像对相对定向
连续法相对定向建立单个模型,建立起的航带内各单个模型的像空间辅助坐标系,其特点是各模型的像空间
辅助坐标系统,坐标轴向都保持彼此平行,但模型比例尺各不相同,坐标原点也不一致。
(3)模型连接构建自由航带网
航带内各立体模型利用公共点进行连接,建立起来统一的航带网模型。航带内各单个模型建立之后,以相邻两模型重叠范围内三个连接点高度应相等为条件,从航带的左端至右端的方向,逐个模型的归化比例尺,统一坐标原点,使全航带内个模型连接成一个统一的自由航带网模型。统一后的模型点坐标为摄影测量坐标系坐标。
(4)航带网的概略绝对定向。
建立的航带网模型是摄影测量坐标系,还需要根据地面控制点,把摄影测量坐标变换为地面摄影测量坐标。即将整个航带网按控制点的摄影测量坐标和地面摄影测量坐标,进行空间相似变换,完成航带网模型的绝对定向。使整个航带网的摄影测量坐标纳入到地面摄影测量坐标系中。
(5)航带网模型的非线性改正。
在模型连接的过程中,单个模型的偶然误差和系统误差会传递到下一个模型中去,会使航带模型产生扭曲变形,所以航带网模型还要进行非线性改正。
(6)加密点坐标计算
2.相对定向
自由航带网的构成包括两部分:像对的相对定向和模型的连接
航带中第一像对定向
选定的像空间辅助坐标系与左片的像空间坐标系相重合,既左片的角元素全为零。完成相对定向后,得出右片相对与左片的三个角元素,既是右片的像空间坐标系相对于像空间辅助坐标系的角元素。
第二像对及以后像对相对定向
第二像对以后各像对中左片的三个角元素,均取前一个像对中右片的角元素作为固定值,在完成相对定向过程中保持不变,只改变像对中的右片。
完成相对定向后的特点:
各模型的像空间辅助坐标系、坐标轴向都保持平行,模型比例尺各不相同,坐标原点也不一致。
3.模型连接
统一比例尺
通过比例尺统一后,就可以求得各单个模型比例尺一致的坐标,还需要将各单个模型连接成一个整体的航带模型,即将航带中所有的摄站点、模型点的坐标都纳入到全航带统一的摄影测量坐标系中,构成自由航带网。
4.像对定向
带模型连接条件的连续相对定向
自由航带模型的计算
特别注意:
?模型中的定向点只建立Q V 方程 ? 模型间的连接点需建立,Q P V V 方程
?对于模型间的连接点建立误差方程时,常数项中的N1 X1,N1 Y1 ,N1 Z1必须用前一模型中的N2 X2,N2 Y2 ,N2 Z2。
模型坐标计算 摄站点的坐标:
任意的非连接点M 的模型坐标
111
1111222111
1
[(]
2
P S P S S P S X X mN X Y Y mN Y Y mN Y Z Z mN Z =+???=+++??=+??
连接点的模型坐标
22222222
22
222
P S a a z
P S P S X X mN X N Z B Y Y mN Y N Z Z Z mN Z =+-=+==+
连续法相对定向
()12b a a
a Z
Z
Z Z B B ==为模型a 的相对定向元素
规化系数
212121S S x S S y S S z X X mB Y Y mB Z Z mB =+?
?
=+??=+?
()212461
3
a a
z Z
b
Z B k Z k k k k -=
=
+
+
摄站点的坐标:
任意的非连接点M 的模型坐标
111
11112221111[(]2P S P S S P S X X kmN X Y Y kmN Y Y kmN Y Z Z kmN Z ?=+?
?=+++??=+??
单独法相对定向
212121S S x S S y S S z
X X kmB Y Y kmB Z Z kmB ?=+?=+??=+?
5. 航带模型的概略绝对定向
建立的自由航带模型其绝对位置及模型比例尺是不确定的,需要根据地面控制点确定航带模型在地面坐标系统中的正确位置和比例尺。但是,自由航带网的绝对定向是在摄影测量坐标系和地面摄影测量坐标系中进行的。主要过程包括:
1、获取控制点的地面摄影测量坐标,,tp tp tp X Y Z
2、计算重心化坐标
3、求相似变换的参数(绝对定向误差方程式的建立和法方程式的求解)
4、计算各模型点的地面摄影测量坐标
6. 非线性改正
由于误差的影响,绝对定向后的坐标只是一个概略值,要得到精确位置,还必须进行非线性变形的改正。一般采用曲面多项式拟合。用一个多项式曲面拟合航带网复杂的变形曲面,使该曲面经过航带网已知点时,所求得坐标变形值与它们实际的变形值相等或使其残差的平方和为最小。
tp tp tp X X X Y Y Y Z Z Z
=+?=+?=+? 用一个二次正形变换多项式曲面拟合航带网的变形曲面,使该曲面经过航带网已知点时,所求得坐标变形值
与它们实际的变形值相等或使其残差的平方和为最小,并且由多项式曲面上一点变换到航带网无变形曲面上相应点时应保持该点处在极小范围内相应线段的夹角不变(保角变换)。
二次正形变换多项式
22322301234567892
2
3
2
2
3
0123456789X a a X a Y a X a XY a Y a X a X Y a XY a Y Y b b X b X b X b XY b Y b X b X Y b XY b Y
'=+++++++++'=+++++++++
误差方程式的建立(以X 坐标为例)
V Ax l =-
注:1021111111212411x tp x tpn
n n n n n n xn v A X x X Y X X Y v A V x A l X x X Y X X Y v A ??
??
??-??
??
??????
??
??
====????
????????
-??????????
??
7. 航带网的系统误差传播
● 系统误差 ● 偶然误差
1)独立累积性误差:不随模型个数的增加而增大其影响[]12n n δδδδ=++
2)非独立累积性误差:随模型个数的增加而增大其影响[]()121n n n n δδδδ=+-+
三. 航带法区域网平差
单航带法解析空中三角测量是把一条航带作为独立的解算单元,求出待定点的地面坐标。而航带法区域网平
差则是以单航带作为基础,把几条航带或一个测区作为一个解算的整体,同时求得整个测区内全部待定点的坐标。
1、建立自由比例尺的航带网
各航带分别进行模型的相对定向和模型连接,然后求出各航带模型中摄站点、控制点和待定点的摄影测量坐标。但是此时求得的摄影测量坐标在坐标原点和模型比例尺方面还是独立的。
2、建立松散的区域网
将自由比例尺的航带网逐条依次进行空间相似变换,即各航带网进行概略绝对定向。 过程:
(1)计算整个区域及各航带重心的地面摄测坐标和摄测坐标; (2)计算第一条航带中各点在区域摄测坐标中的摄测坐标;
(3)依次进行第二条航带及以后各航带的概略绝对定向。 3、区域网整体平差
各航带网同时进行非线性改正,整体平差后求解加密点地面坐标。
对航带间的公共连接点,列出线性改正方程式,此时连接点的坐标是待定的未知数。
航带间公共点的非线性改正误差方程式:
1. 基本思想
如就下面的图说明
1)按照单航带法构建自由航带网
2)利用本航带的控制点以及与上一航带的公共点进行三维空间相似变换,将整个区域各航线
纳入统一的坐标系中。
3)同时解算各航带非线性变形改正参数。 4)计算各加密点坐标。
2. 重心化坐标计算
区域重心坐标()()()()1201201
1
1201201
1
2
2
1
1
2
2
pg p p tpg p p pg p tpg
p pg p p tpg p p X X X X X X Y Y Y Y Z Z Z Z Z Z =+=+===
+=
+ 相片主点位置
平高控制点 待定点
高程控制点
,11,1
220123401234,1,(()i i i i i i X X X X i i V V V A A X A Y A X A XY A A X A Y A X A XY l ++++-=-+=-+++++++++-下上L
BX V -=0
=-PL B PBX B T T
航线重心坐标()
()20
20
212122pg i pg
tpg i tpg
pi p pi p pg i pi tpg i pi pg i pg
tpg pg
X X X X Y Y Y Y Y Y i Y Y i N
N
Z Z Z Z ==--=--=--==
重心化坐标
tp i pt i tpg i tp pt tpg
tp pt tpg tp i pti tpg i tp pt tpg
tp i pti tpg i
X X X X X X Y Y Y Y Y Y Z Z Z Z Z Z =-=-=-=-=-=-
3. 误差方程式的建立(以X 坐标为例)
控制点
公共点
误差方程矩阵形式
1,1,1,11,1,
2
i i i i i i i i i i i i i i V A a l P E
a V A A l p E
a ++++-=-=????-=-=??????
控控控控下
下
四.独立模型法区域网空中三角测量
为了避免误差的累积,可以以单模型(或双模型)为平差计算单元,由一个个相互连接的单模型既可以构成一条航带网,也可以组成一个区域网,但是,构网过程中的误差却被限制在单个模型内,而不会发生误差累积,这样,就可以克服航带法空中三角测量的不足,有利于加密精度的提高。
独立模型法空中三角测量是把单元模型视为刚体,利用各单元模型间的公共点彼此连接成一个区域。在连接过程中,每个单元模型只做旋转、缩放和平移。在变换中要使模型间公共点的坐标尽可能一致,控制点的摄测坐标与其地面坐标尽可能一致,同时观测值的改正数的平方和最小,然后按照最小二乘法原理求得待定点的地面摄测坐标。
独立模型法空中三角测量的主要内容
1、建立单元模型,获得各单元模型的模型点坐标,包括摄站点坐标。
2、利用相邻模型间的公共点和所在模型中的控制点,各单元模型分别作三维线性变换,按各自的条件列出误差方程式,并逐点进行法化,组成总体法方程式。
3、建立全区域的改化法方程式,并按循环分块法求解的每个单元模型的7个参数。
4、按平差后求得的各单元模型的7个变换参数计算每个单元模型中待定点的坐标。各公共点坐标取其均值作为最后坐标。
数学模型
无论是哪种空中三角测量平差方法,在进行整体平差之前,必须为整体平差提供模型点的概略坐标,而且坐标要在统一的坐标系中,比例尺要一致。独立模型法空中三角测量这一工作,也要先求出各模型点坐标的概略值,但模型连接时,是用公共点以模型绝对定向公式进行,各模型坐标在公共点上不取平均,保持独立。
单个模型的空间相似变换
线性化列出误差方程式
tp g tp g tp g X X X Y R Y Y Z Z Z λ????
??????
??=+??????
????
??????
????,,,,100001000010,:g g X X g Y Y Z Z i j i j i j j
X tp Y tp Z tp i j i dX dY X
Z Y v dX l dZ v Y Z X dY l d v dZ l d Z
X
Y
d d X l X l Y R Y l Z Z λφωκλ??
??????-??????????????????-=---????????????????????-????????????
???????????
????=-????
?????????当模型点为控制点时常数项为,000,,,:g g g j i j X g Y g Z g i j i j i j X Y Z X l X X l Y R Y Y l Z Z Z λ???????-?????????????????????
????????=--????????
??????????????????当为待定点时常数项为
五. 光束法区域网空中三角测量
1. 基本思想与内容
? 以一个摄影光束(即一张像片)作为平差计算基本单元,以共线方程作为平差的基础方程,通过各个光束
在空间的旋转和平移,使模型之间公共点的光线实现最佳的交会,并使整个区域纳入到已知的控制点坐标系统中去,在影像公共点坐标应相等,控制`点加密坐标应与地面摄测坐标一致的条件下,保持误差平方和最小的情况下,解求得各像片的外方位元素和加密点的地面坐标。
4条航线,124张影像
? 主要内容及步骤
1、像片外方位元素和地面点坐标近似值的确定。
2、逐步建立误差方程和改化法方程。
3、解求改化法方程式。
4、求出每一张像片的外方位元素。
5、利用空间前方交会求待定点的地面坐标,各片公共连接点取均值作为最后结果。
2. 光束法平差的数学模型
11121122221111222121::
,,,:
()T T T T T T T T V At BX L N N L t t A A A B A L N N L X X B A B B B L X t X t N N N N t L N --=+-????????
?????=?=????????????????????????
-=-用矩阵形式表示为相应的法方程式为通常待定点坐标未知数的个数要远远大于定向未知数的个数所以在法方程求解时先消去其中含未知数较多的得到仅含未知数的改化法方程式1
1222211111122212112222()()
T N L t N N N N L N N L ----=--
3. 像片外方位元素和地面点坐标近似值的获取
? 光束法平差是以共线方程式作为数学模型,像点的像平面坐标观测值是未知数的非线性函数,线性化后,
11
121314151611
121321
22232425262122
23,:
S S x x S y y dX dY dX v l a a a a a a a a a dZ dY v l a a a a a a a a a d dX d d φωκ??????
??
??---????
??????=+-????????????---??????????????
??????
在内方位元素视为已知的情况下误差方程式表示为11103332220333()()()
()()()()()()()()()
S S S S S S S S S S S S a X X b Y Y c Z Z x x f a X X b Y Y c Z Z a X X b Y Y c Z Z y y f a X X b Y Y c Z Z -+-+-?
-=-?-+-+-????
-+-+-?-=--+-+-??
()()()
()()()()()()()()()
111333222333()()S S S x S S S S S S y S S S a X X b Y Y c Z Z l x x x f a X X b Y Y c Z Z a X X b Y Y c Z Z l y y y f
a X X
b Y Y
c Z Z -+-+-=-=+-+-+--+-+-=-=+-+-+-[][]
[]
11
12112222111::
():
[()][()]
T
S S S T
T T T T T T T T T T T T T T T t V A B L
X t dX dY dZ d d d X dX
dY
dZ N N L t t A A A B A L N N L X X B A B B B L t A A A B B B B A A L A B B B B L φ
ωκ---??
=-????==????????
?????=??=????????????????????
????
=-?-写成矩阵形式法方程式为定向未知数外方位元素的解为111211222211
111222121
12222,.6,3,66,33.63.
T T N N L t N N L X N N N N t L N N L t --????
???=????
????????????-?=-???????未知数为像片外方位元素的改正数为点的坐标改正数对于一张像片的外方位元素的未知数是个一个点的坐标未知数是个所以一张像片的法方程式系数矩阵所需占个单元一个点的法方程系数矩阵占个单元而相关系数矩阵占个单元
按最小二乘原理进行计算。而计算中要在提供一个近似解的基础上逐次迭代趋近的求解出最佳解。提供的初始值愈接近最佳值,解的收敛速度愈快。因此,平差计算之前选择好初始值是非常重要的。
? 像片外方位元素和地面点坐标近似值可以利用航带法的加密成果。航带法解析空中三角测量,虽然理论上不十分严密,精度偏低,但其加密的成果,作为光束的初始值却是最佳的。其具体做法是首先按航带法加密计算一次,得到全测区每个像对所需的测图控制点地面摄影测量坐标。然后直接用航带法求出各地面点坐标进行空间后方交会,求出所需像片的外方位元素。把这些值作为光束法平差计算的初始值。
4. 利用双像前方交会求地面点的坐标
5. 两类未知数交替趋近法
认为它们都已知,首先利用地面点坐标近似值作为已知,求得外方位元素,利用外方位元素新值求得新坐标,
反复运算,只到趋于一组值,作为结果。
6. 三种区域网平差的比较
111222122111222122111222122112211221122A S S S X A S S S Y A S S S Z X Y Z X X N X X N X X B N X Y Y N Y Y N Y Y B N Y Z Z N Z Z N Z Z B N Z B N X N X B N Y N Y B N Z N Z ???????????????? ? ? ? ? ? ? ? ?=+=+=++ ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?????????????????=-??=-=-2222111221
12211111
2212211221x y X Z X Z x y b Y b X B Z B X N N X Z X Z X Y X Y B Z B X b Y b X N N X Z X Z X Y X Y -?-?
==??--????????--???==???--??
12
112211121212111222
1212
1111121222
:(1):,;A S A S A S A S A S A S S S X x X x Y R y Y R y Z f Z f X X Y Y Z Z X X Y Y Z Z S A S A N N S a X Y Z S a X Y Z ???????? ? ? ? ?== ? ? ? ? ? ? ? ?--????????------========地面物点的空间坐标计算和像空间辅助坐标的计算
六.解析空中三角测量的精度分析
理论精度
是从理论上进行分析,把待定点的坐标改正数视为随机变量,在最小二乘计算中,求出坐标改正数的方差—协方差矩阵。
理论精度能了解和掌握区域网平差后误差的分布规律,据此可以对控制点进行合理布设。
七.摄影测量与非摄影测量观测值的联合平差
联合平差的概念
用摄影测量方法加密点的坐标时,常需要某些非摄影测量信息。为了进行摄影测量网的空间定位,至少需要7个独立的大地测观测值或条件方程来解决空间网的平移、旋转与缩放。通常的摄影测量平差总是利用若干地面控制点将摄影测量坐标转换到规定的大地坐标系去。(不认为是联合平差)
联合平差指的是在摄影测量平差中使用了更一般的原始的非摄影测量观测值或条件。主要有以下几类:(1)物方空间的大地测量观测值(坐标,方位角,水平角等)
(2)影像外方位元素观测值或条件。(GPS或INS提供的摄站坐标、坐标差或影像姿态角的元素)。
(3)一组摄影测量点应满足的条件(如平静湖面上的点应具有相同的高程)。
联合平差中非摄影测量条件方程的建立
光束法平差基础的共线方程
各类观测值的误差方程
未知数之间的条件方程
GPS辅助空中三角测量
GPS测定摄站点坐标
GPS测定飞机姿态参数
解析空中三角测量程序代码
using System; using System.Collections.Generic; using https://www.360docs.net/doc/c818177129.html,ponentModel; using System.Data; using System.Drawing; using System.Text; using System.Windows.Forms; using System.IO; using System.Data.OleDb; namespace 解析空中三角测量 { public partial class Form1 : Form { public Form1() { InitializeComponent(); } #region/////////////////////////////////////////////////////////////定义静态变量 ///////////////////////////////////////////////////////////////
const int N = 150; int[] C = new int[3] { 15, 8, 11 };//各像对像点个数int[][] LDot = new int[3][];//像点点号 int[] Control_Points = new int[4];//控制点点号 int[] CheckPoint = new int[5];//检查点点号. double f = 153.033 / 1000.0;//主距 double m;//比例尺 //像对像点坐标 double[][] x1 = new double[3][]; double[][] y1 = new double[3][]; double[][] x2 = new double[3][]; double[][] y2 = new double[3][]; //像点的像空间辅助坐标 double[][] X1 = new double[3][]; double[][] Y1 = new double[3][]; double[][] Z1 = new double[3][]; double[][] X2 = new double[3][]; double[][] Y2 = new double[3][]; double[][] Z2 = new double[3][]; //相对定向元素 double[] φ1 = new do uble[3]; double[] ω1 = new double[3]; double[] κ1 = new double[3]; double[] φ2 = new double[3]; double[] ω2 = new double[3]; double[] κ2 = new double[3]; double[] u = new double[3]; double[] v = new double[3]; //摄影基线分量 double[] bx = new double[3]; double[] by = new double[3]; double[] bz = new double[3]; //左、右像片投影系数N1,N2 double[][] N1 = new double[3][]; double[][] N2 = new double[3][]; //上下视差Q double[][] Q = new double[3][]; //模型点像空间辅助坐标 double[][] Xm = new double[3][]; double[][] Ym = new double[3][]; double[][] Zm = new double[3][]; //三个直线元素 double[] Xs = new double[4]; double[] Ys = new double[4];
04解析空中三角测量7-12介绍
摄影测量学 Photogrammetry 解析空中三角测量 Analytical Aerotriangulation 山东农业大学信息学院测绘系厉彦玲 山东农业大学 Tel:8249032 Email: liyanling@https://www.360docs.net/doc/c818177129.html,
本章内容 摄影测量学4.1 概述 4.2 影像连接点的类型与设置 4.3 像点坐标量测与系统误差预改正 4.4 航带网法空中三角测量 4.5 独立模型法区域网空中三角测量 4.6 光束法区域网空中三角测量 4.7 系统误差补偿与自检校光束法区域网平差 4.8 摄影测量与非摄影测量观测值的联合平差 4.9 GPS辅助空中三角测量 4.10 自动空中三角测量 4.11 机载POS系统对地定位 4.12 解析摄影测量中粗差检测原理概述
4.7 系统误差补偿与自检校光束法区域网平差 摄影测量学4.7.1 影像坐标系统误差的特性 4.7.2 补偿系统误差的方法 4.7.3 利用附加参数的自检校法
4.7.1 影像坐标系统误差的特性 摄影测量学 1、摄影机的系统误差 2、航摄飞机飞行 3、底片变形 4、大气折光 5、地球曲率 6、观测设备与观测员 许多系统误差是在实验室测定的 只有在同一天用同一软片暗匣和相同的滤光片摄得的像片才有相同的系统误差
4.7.2 补偿系统误差的方法 摄影测量学尽量剔除粗差、减小偶然误差,才能补偿系统误差 试验场检校法 德国Kupfer 验后补偿法 法国Masson 自检校法(利用附加参数的整体平差法) 自抵消法 对同一测区进行相互垂直的两次航摄飞行 组合使用:自检校法+验后补偿法 试验场检校法+自检校法
△ 解析空中三角测量
解析空中三角测量 Arshad Edited&Sheared 前言 此为开源Word版的摄影测量解析空中三角测量的学习笔记,希望亲爱的同学们,能再接再厉把这份文件做的更好,以方便更多的同学学习,从而为推动摄影测量学的发展贡献力所能及的力量。请将编辑后的文件及时发到百度文库共享。也欢迎把编辑后的版本我: hurricanblue@https://www.360docs.net/doc/c818177129.html,。 一.综述 1.前言 解析空中三角测量就是以像片上量测的像点坐标为依据,采用较严密的数学模型,按最小二乘法原理,用少量地面控制点为平差条件,用计算机解算测图所需地面控制点的空间坐标。要将空中摄站及影像放到整个的加密网中,起到点的传递和构网作用,故被称为空中三角测量。 应用 ?提供定向控制点; ?部分取代大地测量野外控制点; ?用于地籍测量,建立坐标地籍; ?获得大量点地面坐标; ?解析法地面摄影测量。 目的 ?地形测图的摄影测量加密; ?高精度摄影测量加密。 根据平差计算采用的数学模型: 航带法、独立模型法、光束法。 根据平差计算的范围: 单模型、单航带和区域网解析法。 摄影测量信息: 主要指在影像上量测的控制点、连接点的影像坐标。 非摄影测量信息: 主要指将空中三角测量网纳入到规定物方坐标系统所必须的基准信息。 2.像点坐标量测与系统误差改正 会引起像幅的增大或缩小,甚至切错变换,可根据像片上的框标位置来改正像点坐标。
二.航带法空中三角测量 航带法空中三角测量研究的对象是一条航带的模型,即首先要把许多立体像对所构成的单个模型连接成航带模型,然后,把一个航带模型视为一个单元模型进行解析处理。通过消除航带模型中的累积的系统误差,将航带模型整体纳入到测图坐标系中,从而确定加密点的坐标。 由于在单个模型连成航带模型的过程中,各单个模型中的偶然误差和残余的系统误差将传递到下一个模型中去,这些误差传递累计的结果会使航带模型产生扭曲变形,所以航带模型绝对定向后,还需做模型的非线性改正。 1.主要步骤及过程 (1)像点坐标系统误差预改正。 (2)立体像对相对定向 连续法相对定向建立单个模型,建立起的航带内各单个模型的像空间辅助坐标系,其特点是各模型的像空间
解析空中三角测量实验报告
实验二、解析空中三角测量 一、实验目的: 了解VirtuoZo运行环境及软件模块的操作特点,了解软件使用大致流程,从而能对数字摄影测量有个整体概念。完成航测影像的内定向,相对定向,绝对定向等工作。 二、实验工具: VirtuoZo软件 三、实验原理: 内定向:建立影像扫描坐标与像点坐标的转换关系,求取转换参数; 相对定向:通过量取模型的同名像点,解算两相邻影像的相对位置关系; 绝对定向:通过量取地面控制点对应的像点坐标,解算模型的外方位元素,将模型纳入到大地坐标系中。 四、实验步骤: 1.安装Virtuozo软件,安装好软件后再在“网上邻居”中的“本地连接”中将网 络地址改为:。 2.建立测区:输入测区的相应参数(给出测区路径及测区名称、控制点文件路径 及文件名、加密点文件路径及文件名、相机参数文件路径及文件名等)
3.输入影像文件,将像素大小改为-1 4.新建模型:新建一个模型,并将左右影像导入(164为左影像,165为右影像) 5.内定向:选择“处理--模型定向--内定向。对各个框标进行调整,使他们 的位置与模型的框标准确的重合.
6.自动相对定向:在此步中,需要加入适当数量的控制点(即在实验一中选出的 控制点,至少选择4个)。然后点击鼠标右键进行自动相对定向。根据右边的定 向结果,删除不符合要求的点,然后再进行相对定向。 7.绝对定向:以普通方式进行绝对定向。缩短步距改正DX,DY,DZ使得每个控制点 的DX=DY=DZ=0。 五、实验结果: 六、实验心得: 通过本次实验让我对VirtuoZo这个软件有了一个大致的了解,了解了它运行环境和模块特点。对内定向,相对定向,绝对定向也有了更清晰的认识,实验中印象很深刻的是软件的高度自动化和简单操作性。在内定向,相对定向,绝对定向这几个在