计算机图形学复习题

第1章绪论
1、计算机图形学的概念?(或什么是计算机图形学?)
计算机图形学是研究怎样利用计算机表示、生成、处理和显示图形的(原理、算法、方法和技
术)一门学科。
2、图形与图像的区别?
图像:指计算机内以位图(Bitmap)形式存在的灰度信息;
图形:含有几何属性,更强调物体(或场景)的几何表示,是由物体(或场景)的几何模型(几何参数)和物理属性(属性参数)共同组成的。
3、计算机图形学的研究内容?
计算机图形学的研究内容非常广泛,有图形硬件、图形标准、图形交互技术、光栅图形生成算法、曲线曲面造型、实体造型、真实感图形计算与显示算法,以及科学计算可视化、计算机动画、自然景物仿真和虚拟现实等。
4、计算机图形学的最高奖是以Coons 的名字命名的,而分别获得第一届(1983年)和第二届(1985年)
Steven A. Coons奖的,恰好是Ivan E. Sutherland和Pierre Bézier 。
5、1971年,Gourand提出“漫反射模型+插值”的思想,被称为Gourand 明暗处理。
6、1975年,Phong提出了著名的简单光照模型——Phong模型。
7、1980年,Whitted提出了一个光透明模型——Whitted模型,并第一次给出光线跟踪算法的范例,实现了Whitted模型。
8、SIGGRAPH 会议:计算机图形学最权威国际会议
9、三维形体重建:从二维信息中提取三维信息,通过对这些信息进行分类、综合等一系列处理,在三维空间
中重新构造出二维信息所对应的三维形体,恢复形体的点、线、面及其拓扑关系,从而实现形体的重建。
10、一个图形系统通常由图形处理器、图形输入设备和输出设备构成。
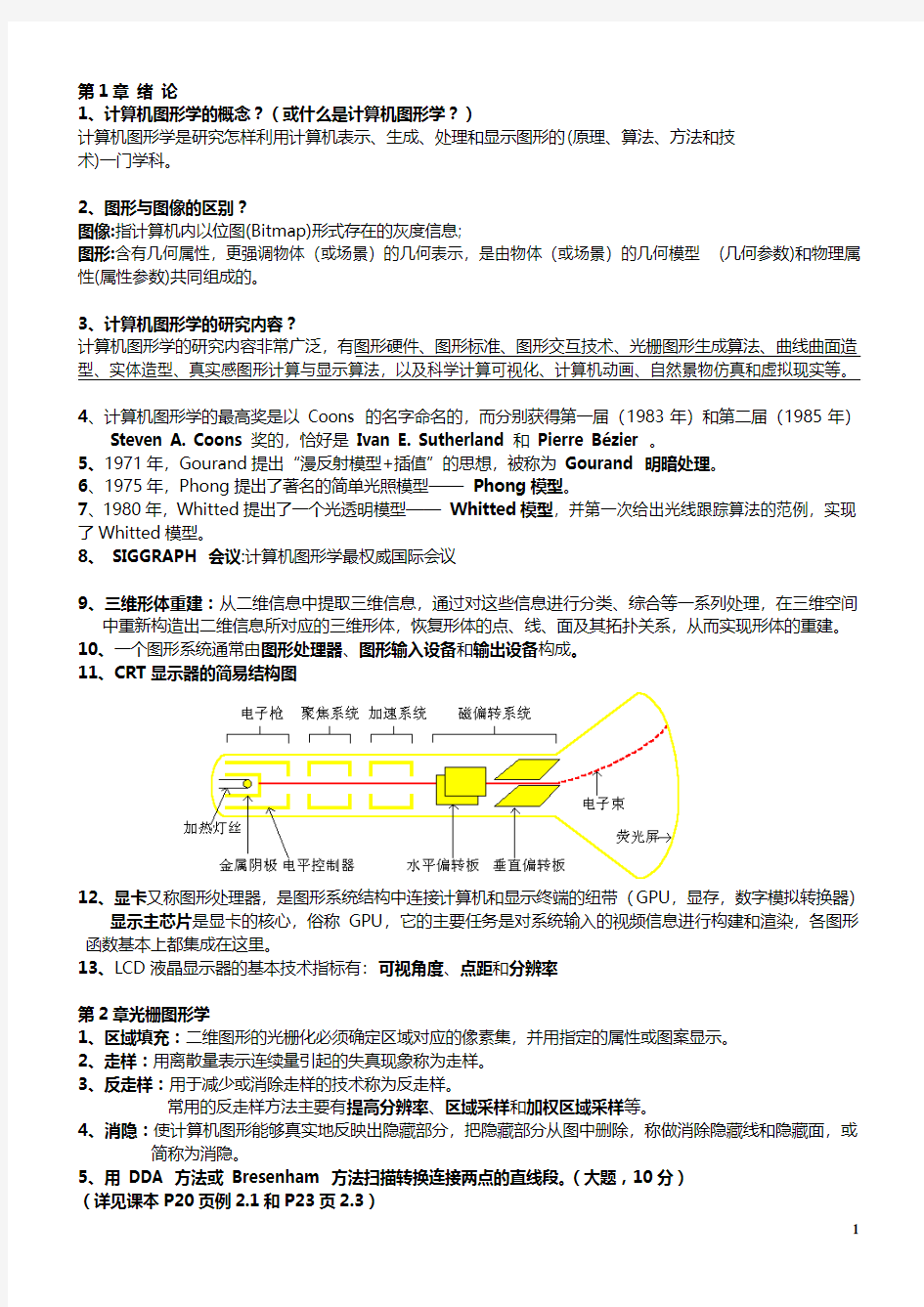
11、CRT显示器的简易结构图
12、显卡又称图形处理器,是图形系统结构中连接计算机和显示终端的纽带(GPU,显存,数字模拟转换器)
显示主芯片是显卡的核心,俗称GPU,它的主要任务是对系统输入的视频信息进行构建和渲染,各图形函数基本上都集成在这里。
13、LCD液晶显示器的基本技术指标有:可视角度、点距和分辨率
第2章光栅图形学
1、区域填充:二维图形的光栅化必须确定区域对应的像素集,并用指定的属性或图案显示。
2、走样:用离散量表示连续量引起的失真现象称为走样。
3、反走样:用于减少或消除走样的技术称为反走样。
常用的反走样方法主要有提高分辨率、区域采样和加权区域采样等。
4、消隐:使计算机图形能够真实地反映出隐藏部分,把隐藏部分从图中删除,称做消除隐藏线和隐藏面,或
简称为消隐。
5、用DDA 方法或Bresenham 方法扫描转换连接两点的直线段。(大题,10分)
(详见课本P20页例2.1和P23页2.3)
6、计算机图形学中,多边形有两种重要的表示方法:顶点表示和点阵表示。
顶点表示是用多边形的顶点序列来表示多边形。这种表示直观、几何意义强、占内存少,易于进行几何变换。但由于它没有明确指出哪些图像在多边形内,故不能直接用于面着色。
点阵表示是用位于多边形内的像素集合来刻画多边形,这种表示丢失了许多几何信息,但便于帧缓冲器表示图形,是面着色所需要的图形表示形式。
7、把多边形的顶点表示转换为点阵表示,这种转换称为多边形的扫描转换。
●扫描线算法步骤:①求交②排序③配对④填色
交点取舍:
①若扫描线与多边形相交的边分处扫描线的两侧,则计1个交点
②若扫描线与多边形相交的边分处扫描线同侧,且y i
则计0个交点
③若扫描线与多边形边界重合,则计1个交点
●边界标志算法基本思想:在帧缓冲器中对多边形的每条边进行直线扫描转换,即对多边形边界所经过
的像素打上标志;然后再采用和扫描线算法类似的方法将位于多边形内的各个区段着上所需颜色。对每条与多边形相交的扫描线依从左到右的顺序,逐个访问该扫描线上的像素。使用一个布尔量inside 来表示当前点是否在多边形内。inside初值为假,每当当前访问的像素是被打上边标志的点时,就把inside取反。对未标志的像素,inside不变。若访问当前像素时,inside为真,说明该像素在多边形内,则把该像素置为填充颜色。
8、采用扫描线多边形区域填充算法,设计出扫描线的活性边表和各条扫描线的新边表。(大题,15分)
9、区域填充算法(递归算法,扫描线算法)
四连通区域:从区域上一点出发,可通过4个方向(即上、下、左、右)移动的组合,在不越出区域的前提下,到达区域内的任意像素。
八连通区域:从区域内每一像素出发,均可通过8个方向(即上、下、左、右、左上、右上、左下、右下)移动的组合来到达指定区域内的像素。
扫描线算法步骤:①初始化②出栈③填充并确定种子点所在区段④确定新的种子点
10、字库中存储了每个字符的形状信息,分为点阵型和矢量型两种。
11、裁剪:使用计算机处理图形信息时,计算机内部存储的图形往往比较大,而屏幕显示的只是图的一部分,
因此需要确定图形中哪些部分落在显示区之内,哪些落在显示区之外,这样便于只显示落在显示区
内的那部分图形,以提高显示效率。这个选择过程称为裁剪。
12、线段裁剪方法:①Cohen-Sutherland法②中点分割法③梁友栋-Barskey裁剪算法
●Cohen-Sutherland法
思想:①若P1P2完全在窗口内,则显示该线段P1P2,简称“取”之
②若P1P2完全在窗口外,则丢弃该线段,简称“弃”之
③若线段既不满足“取”的条件,也不满足“弃”的条件,则在交点处把线段分为两段,
其中一段完全在窗口外,可弃之,然后对另一段重复上述处理
具体步骤:裁剪一条线段时,先求出P1P2所在的区号code1,code2.若code1=0,且code2=0,
则线段P1P2在窗口内,应取之。若按位与运算code1&code2≠0,则说明两个端点同在窗口的
上方、下方、左方或右方,可判断线段完全在窗口外,可弃之;否则,按第三种情况处理,求出
线段与窗口某边的交点,在交点处把线段一分为二,其中必有一段在窗口外,可弃之,再对另一
段重复上述处理。在实现本算法时,不必把线段与每条窗口边界依次求交,只有按顺序检测到端
点的编码不为0时,才对线段与对应的窗口边界求交
●中点分割法
思想:全在窗口内、完全不在窗口内同Cohen-Sutherland法;线段与窗口有交,用中点分割的
方法求出线段与窗口的交点,即从P0点出发找到距P0最近的可见点A,并从P1点出发找到距
P1最近的可见点B,两个可见点之间的连线即为线段P0P1的可见部分。
13、多边形裁剪思想:一次用窗口的一条边裁剪多边形。仅考虑窗口的一条边以及延长线构成的裁剪线,该线把平面分成两个部分:一部分包含窗口,成为可见一侧;另一部分称为不可见一侧。依序考虑多边形各条边的两端点S、P,①S,P均在可见一侧,输出顶点P ②S,P均在不可见一侧,输出0个顶点③S可见,P不可见,输出线段SP与裁剪线的交点I ④S不可见,P可见,输出线段SP与裁剪线的交点I和终点P
第3章几何造型技术
1、曲线和曲面的表示方程有参数表示和非参数表示之分,非参数表示又分为显示表示和隐式表示。
2、光顺:曲线的拐点不能太多,曲线拐来拐去就会不顺眼。对平面曲线而言,相对光顺的条件:
①具有二阶几何连续性(G2)②不存在多余拐点和奇异点③曲率变化较小
3、在曲线、曲面拼接时,为了保证在连接点处平滑过渡,需要满足连续性条件。连续性条件有两种:
参数连续性:曲线间连接n阶连续可微,这类光滑度称为C n
几何连续性:组合曲线在连接处满足不同于C n的某一组约束条件称为具有n阶几何连续性,简记G n
C0/G0连续:P(1)=Q(0)
G1连续: 满足G0连续的条件下,Q′(0)=αP′(1)(α>0)
C1连续:满足C0连续的条件下,Q′(0)=P′(1)
G2连续: 满足G1连续的条件下,Q"(0)=α2P"(1)+βP′(1)
C2连续: 满足C1连续的条件下,Q"(0)=P"(1)
4、Bézier曲线的递推计算公式
Bézier曲线的性质:①端点性质②对称性③凸包性④几何不变性⑤变差缩减性⑥仿射不变性
5、设有两条Bezier曲线P(t)和Q(t),其相应控制顶点分别为P i(i=0,1……,n)和P i(i=0,1……,n)且令
a i=P i-P i-1,
b j=Q j-Q j-1
G0连续的充要条件:P n=Q0
G1连续的充要条件:P n-1,P n=Q0,Q1三点共线,即b1=αa n(α>0)
G2连续的充要条件:满足G1连续的条件下,Q"(0)=α2P"(1)+βP′(1)
6、B样条曲线类型:①均匀B样条曲线②准均匀B样条曲线③分段Bezier曲线④非均匀B样条曲线
7、正则形体:对于任一形体,如果它是三维欧氏空间R3中非空、有界的封闭子集,且其边界是二维流形,则
该形体为正则形体
8、在实体模型的表示中,出现了许多方法,基本上可以分为分解表示、构造表示和边界表示三大类。
扫描表示是基于一个基体(一般是一个封闭的平面轮廓)沿某一路径运动而产生形体。
构造实体几何表示是通过对体素定义运算而得到新的形体的一种表示方法。构造实体几何表示可以看成是一棵有序的二叉树,其终端节点或是体素或是形体变换参数;非终端节点或是正则的集合运算,或是几何变换(平移和/或旋转)操作,这种运算或变换只对其紧接着的子节点(子形体)起作用。
边界表示是几何造型中最成熟、无二义的表示法。实体的边界通常是由面的并集来表示,而每个面又由它所在曲面的定义加上其边界来表示,面的边界是边的并集,而边又是由点来表示的。
9、构造表示通常有扫描表示、构造实体几何表示和特征表示三种。
10、在实体造型中边界表示的数据结构:半边数据结构、翼边数据结构和辐射边数据结构等。
11、设有控制顶点为P0(0,0),P1(48,96),P2(120,120),P3(216,72)的三次Bézier曲线P(t),试计算P(0.4)的(x,y)坐标,并写出(x(t),y(t))的多项式表示。
12、计算以(30,0),(60,10),(80,30),(90,60),(90,90)为控制顶点的4次Bézier曲线在t=.处的值,并画出de Casteljau 三角形。
13、以下是3次Bézier曲线的MATLAB程序实例,请完善程序中的缺漏部分。
P0 = [100,100]; P1 = [200, 450];
P2 = [400,600]; P3 = [500,150];
count = 100; deltat = 1/count;
t=0.0;
PX(1) = P0(1); PY(1) = P0(2);
for i = 1:count
t = ;
B0 = 1-3*t+3*t*t-t*t*t;
B1 = ;
B2 = ;
B3 = ;
PX(i+1) = B0*P0(1) + B1*P1(1) + B2*P2(1) + B3*P3(1);
PY(i+1) = ;
end
第4章真实感图形学
1、颜色特性心理学和视觉:①色调②饱和度③亮度
光学物理学:①主波长②纯度③明度
色调,是一种颜色区别于其他颜色的因素,也就是平常所说的红、绿、蓝、紫等颜色;
饱和度是指颜色的纯度,鲜红色的饱和度高,而粉红色的饱和度低;
亮度就是光的强度,是光给人刺激的强度。
主波长是产生颜色的光的波长,对应于视觉感知的色调;
光的纯度对应于饱和度;
明度就是光的亮度。
2、异谱同色:两种光的光谱分布不同而颜色相同的现象
3、常用的颜色模型:RGB颜色模型、CMY颜色模型。
RGB颜色模型:常用于彩色阴极射线管等彩色光栅图形显示设备中,它采用三维直角坐标系,是使用最多,也是最熟悉的颜色模型。
CMY颜色模型:常用于从白光中滤去某种颜色,又被称为减型原色系统。
4、Phong光照明模型:I=I a K a+I p K d(L·N)+I p K s(R·V)n由物体表面上一点P反射到视点的光强
①环境光I e= I a K a:环境光的反射光强③镜面反射光I s= I p K s(R·V)n:镜面反射光强
I a:环境光的光强I p:入射光强
K a:物体对环境光的反射系数K s:与物体有关的镜面反射系数
②理想漫反射I d= I p K d(L·N):理想漫反射光强R:反射方向
I p:入射光强V:视线方向
K d:与物体有关的漫反射系数n:反射指数
L:从P指向光源的向量
N:物体表面上点P的法向量
5、增量式光照明模型
①双线性光强插值(Gourand明暗处理):先计算物体表面多边形各顶点的光强,然后用双线性插值
求出多边形内部区域中各点的光强
算法描述:⑴计算多边形顶点的平均法向
⑵用Phong光照明模型计算顶点的平均光强
⑶插值计算离散边上的各点光强
⑷插值计算多边形内域中各点的光强
②双线性法向插值(Phong明暗处理):双线性法向插值将反射引进到明暗处理中,解决了高光问题
特点:⑴保留双线性插值,对多边形边上的点和内域各点采用增量法
⑵对顶点的法向量进行插值,而顶点的法向量用相邻的多边形的法向量的平均值得到
⑶由插值得到的法向量,计算每个像素的光亮度
⑷假定光源与视点均在无穷远处,光强只是法向量的函数
6、双线性光强插值:优点:计算量小;
缺点:高光有时会异常(扩散),会造成表面上出现过亮或过暗的条纹。
双线性法向插值:优点:Phong着色方法绘制的图形比Gouraud方法更真实,体现在两个方面:
①产生正确的高光区域;②马赫带效应比Gouraud方法要弱;
缺点:计算量远大于Gouraud着色方法。
7、光线跟踪的基本原理
从视点出发,过像平面上每一像素中心向场景作一条“光线”,若光线与场景中的景物无交,跟踪结束。否则,求出最近的交点(隐含完成了消隐)。此时,光线在交点处的走向有3种可能:
(1)交点处的物体表面为理想漫射面,跟踪结束;
(2)交点处的物体表面为镜面,沿其镜面反射方向继续跟踪;
(3)交点处的物体表面为透射面,沿其规则透射方向继续跟踪。
终止条件:①该光线为碰到任何物体
②该光线碰到了背景
③光线在经过多次反射和折射以后会产生衰减,光线对于视点的光强贡献很小
④光线反射或折射次数即跟踪深度大于给定值
8、简单光照模型:只考虑物体对直接光照的反射作用,物体间的光反射作用只用环境光统一表示
局部光照模型:仅处理光源直接照射物体表面的光照明模型
整体光照模型:处理物体间光照的相互作用的模型
1、绕三角形某个顶点,顺时针或逆时针旋转45°,写出每一步几何变换的矩阵和齐次坐标。
2、绕三角形某个顶点,顺时针或逆时针旋转45°,放大两倍,写出每一步几何变换的矩阵和齐次坐标。(详见
课本P207-208页)
3、投影分类P212
计算机图形学试题1
计算机图形学测试题 (一) 1.能在人的视觉系统中产生视觉印象的客观对象,包括自然景物、拍摄到的图片、用数学方法描述的图形等等,都是计算机(A)学的研究对象。 A.图形B.语言C.技术D.地理 2.刻画对象的轮廓、形状等,构成了图形的(B)要素。 A.化学B.几何C.技术D.语言 3.刻画对象的颜色、材质等,构成了图形的非(C)要素。 A.化学B.技术C.几何D.语言 4.点阵表示法枚举出图形中所有的点,简称为数字(D)。 A.图形B.图元C.像素D.图像 5.参数表示法包括了形状参数和属性参数等,简称为(A)。 A.图形B.图元C.像素D.图像 6.计算机辅助设计、科学计算可视化、计算机艺术、地理信息系统、计算机动画及广告影视创作、电脑游戏、多媒体系统、虚拟现实系统等,都是计算机(B)学的实际应用。 A.图像B.图形C.地理D.技术 7.科学计算可视化(Scientific Visualization)在直接分析大量的测量数据或统计数据有困难时可以实现用(C)表现抽象的数据。 A.技术B.几何C.图形D.像素 8.计算机艺术软件工具PhotoShop、CorelDraw、PaintBrush等具有创作轻松、调色方便等(D),但也有难以容入人的灵感等缺点。 A.历史B.现实C.缺点D.优点 9.3D MAX, MAYA等等都是很好的计算机(A)创作工具。 A.动画B.图形C.图像D.像素 10.电子游戏的实时性、逼真性,蕴含了大量先进的计算机(B)处理技术。 A.金融B.图形C.商业D.交易 11.在计算机控制下,对多种媒体信息进行生成、操作、表现、存储、通信、或集成的处理,总要包括文本、(C)、图像、语音、音频、视频、动画等。 A.文本B.语音C.图形D.动画 12.虚拟现实(Virtual Reality)或称虚拟环境(Virtual Environment)是用(D)技术来生成一个逼真的三维视觉、听觉、触觉或嗅觉等感觉世界。 A.控制B.机械C.物理D.计算机 13.媒体包括“连续媒体”和“离散媒体”,计算机总是要把连续的媒体(A)为离散的信息。 A.转换B.计算C.控制D.组合 14.虚拟现实可以让用户从自己的视点出发,利用自然的技能和某些设备对这一生成的(B)世界客体进行浏览和交互考察。 A.现实B.虚拟C.物理D.历史 (二) 15.电子束轰击荧光屏产生的亮点只能持续极短的时间,为了产生静态的不闪烁的图像,电子束必须周期性地反复扫描所要绘制的图形,这个过程称为(C)。 A.启动B.驱动C.刷新D.更新 16.阴极射线管(CRT)的电子枪发射电子束,经过聚焦系统、加速电极、偏转系统,轰击到荧光屏的不同部位,被其内表面的荧光物质吸收,发光产生可见的(D)。 A.电子B.物质C.光线D.图形 17.像素(Pixel:Picture Cell)是构成屏幕(A)的最小元素。 A.图像B.图框C.线D.点 18.分辨率(Resolution)是指在水平或竖直方向单位长度上能识别的最大(B)个数,单位通常为dpi(dots per inch)。 A.图像B.像素C.线D.圆 19.假定屏幕尺寸一定,常用整个屏幕所能容纳的像素个数描述屏幕的(C),如640*480,800*600,1024*768,1280*1024等等。 A.大小B.容量C.分辨率D.亮度 (三) 20.容器坐标系包括坐标原点、坐标度量单位和坐标轴的长度与(D)。
《计算机图形学》 试卷A及参考答案
()4.EGA/VGA为增强图形显示效果的一种图形处理软件的名称。 ()5.对山、水等不规则对象进行造型时,大多采用过程式模拟方法。 ()6.实体的边界由平面多边形或空间曲面片组成。 ()7.平面多面体表面的平面多边形的边最多属于两个多边形,即它的表面具有二维流形的性质。 ()8.观察空间位于前后裁剪面之间的部分称为裁剪空间或视见体。 ()9.找出并消除物体中的不可见部分,称为消隐。 ()10.使用齐次坐标可以将n维空间的一个点向量唯一的映射到n+1维空间中。 三、填空题(将正确答案填入横线上,每空2分,共20分) 1.直线的属性包括线型、和颜色。 2.颜色通常用红、绿和蓝三原色的含量来表示。对于不具有彩色功能的显示系统,颜色显示为。 3.平面图形在内存中有两种表示方法,即和矢量表示法。 4.将三维物体变为二维图形的变换称为,其有两种基本方式:平行投影、。 5.边界点组成的集合称为集合的。 6.对于一个占据有限空间的正则(点)集,如果其表面是,则该正则集为一个实体有效物体。 7.通过实体的边界来表示一个实体的方法称为。 8.表面由平面多边形构成的空间三维体称为。 9.标量:一个标量表示。 四、简答题(每小题5分,共20分) 1.什么是图像的分辨率?
2.局部光照模型和全局光照模型的不同之处是什么? 3.实体采用八叉树表示法有哪些缺点? 4.消隐算法有哪些类型,它们各有什么特点?
五、计算题(每小题11分,共22分) 1.写出直线方程b mx y +=''对应的xy 坐标方程,假设''y x 坐标系是由xy 坐标系旋转90°得到。 2.写出从),(111y x P 到),(222y x P 的段与(a )垂直线x =a , (b )水平线y =b 的交点。
《计算机图形学》练习试题及参考答案(七)
《计算机图形学》模拟试卷一 一、【单项选择题】(本大题共10小题,每小题2分,共20分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在答题卷相应题号处。 1、计算机图形学与计算机图像学(图像处理)的关系是()。 [A] 计算机图形学是基础,计算机图像学是其发展 [B] 不同的学科,研究对象和数学基础都不同,但它们之间也有可相互转换部分 [C] 同一学科在不同场合的不同称呼而已 [D] 完全不同的学科,两者毫不相干 2、多边形填充算法中,错误的描述是()。 [A] 扫描线算法对每个象素只访问一次,主要缺点是对各种表的维持和排序的耗费较大 [B] 边填充算法基本思想是对于每一条扫描线与多边形的交点,将其右方象素取补 [C] 边填充算法较适合于帧缓冲存储器的图形系统 [D] 边标志算法也不能解决象素被重复访问的缺点 3、在多边形的逐边裁剪法中,对于某条多边形的边(方向为从端点S到端点P)与某条裁剪线(窗口的某一边)的比较结果共有以下四种情况,分别需输出一些顶点。哪种情况下输出的顶点是错误的?() [A] S和P均在可见的一侧,则输出点P [B] S和P均在不可见的一侧,,则输出0个顶点 [C] S在可见一侧,,P在不可见一侧,则输出线段SP与裁剪线的交点和S [D] S在不可见的一侧,P在可见的一侧,则输出线段SP与裁剪线的交点和P 4、下列关于反走样的叙述中,错误的论述为()。 [A] 把像素当作平面区域来采样[B] 提高分辨率 [C] 增强图像的显示亮度[D] 采用锥形滤波器进行加权区域采样 5、下列关于平面几何投影的叙述中,错误的论述为()。 [A] 透视投影的投影中心到投影面的距离是有限的 [B] 在平行投影中不可能产生灭点 [C] 在透视投影中,一组平行线的投影仍保持平行 [D] 透视投影与平行投影相比,视觉效果更真实,但不一定能真实反映物体的精确尺寸和形状 6、下列关于Bezier曲线的论述中,错误的论述为()。 [A] 曲线及其控制多边形在起点和终点具有同样的几何性质 [B] 在起点和终点处的切线方向和控制多边形第一条边和最后一条边的方向相同 [C] n个控制点控制一条n次Bezier曲线 [D] 某直线与平面Bezier曲线的交点个数不多于该直线与控制多边形的交点个数 7、下面给出的四个选项中,()不是Bezier曲线具有的性质。 [A] 局部性[B] 几何不变性[C] 变差缩减性[D] 凸包性
《计算机图形学》复习试题
计算机图形学模拟试卷 计算机图形学课程试卷(卷) 注意:1、本课程为必修(表明必修或选修),学时为 51 ,学分为 3 2、本试卷共 3 页;考试时间 120 分钟;出卷时间:年 12 月 3、姓名、学号等必须写在指定地方;考试时间:年 1 月 11 日 4、本考卷适用专业年级:任课教师: (以上内容为教师填写) 专业年级班级 学号姓名 一、名词解释(15分) 1.国际标准化组织(ISO)对计算机图形学的定义
2. 象素图 3. 正投影 4. 纹理 5. 位图 二.单项选择题(1.5×10=15分) ( )1、在TC 环境下编译绘图程序进行图形初始化时,要寻找文件的格式是?______。 A ).DOC B ).CPP C ).C D ).BGI ( )2、图形系统是由四部分组成,分别为 A).应用系统结构;图形应用软件;图形支撑软件;图形设备。 B).计算机;显示器;打印机;图形应用软件。 C).计算机;图形设备;图形支撑软件;图形应用软件。 D).计算机;图形软件;图形设备;应用数据结构。 ( )3、使用下列二维图形变换矩阵: T=???? ??????111020002 将产生变换的结果为______ 。 A )图形放大2倍; B )图形放大2倍,同时沿X 、Y 坐标轴方向各移动1个绘图单位; C )沿X 坐标轴方向各移动2个绘图单位; D )上述答案都不对。 ( )4、图形显示器的工作方式为 A ).文本方式 B ).图形方式 C ).点阵方式 D ).文本与图形方式 ( )5、透视投影中主灭点最多可以有几个? A) 3 B)2 C)1 D)0 ( )6、在用射线法进行点与多边形之间的包含性检测时,下述哪一个操作不正确? A) 当射线与多边形交于某顶点时且该点的两个邻边在射线的一侧时,计数0次 B) 当射线与多边形交于某顶点时且该点的两个邻边在射线的一侧时,计数2次 C) 当射线与多边形交于某顶点时且该点的两个邻边在射线的两侧时,计数1次 D) 当射线与多边形的某边重合时,计数1次 ( )7、下列有关平面几何投影的叙述语句中,正确的论述为
计算机图形学考试整理
第一章:1.什么是计算机图形学,它主要研究内容? 答:是一门研究用计算机将数据转换成图形,并在专用设备上显示和处理的学科,它着重研究图形生成和处理的原理、方法和技术,是一门多学科综合应用的新技术。 研究内容分为九个方向:1)基于设备的基本图形生成算法,如直线、圆弧等;2)图形元素的裁剪和几何变换技术;3)曲线和曲面的处理技术:插值、拟合、拼接和分解4)三维几何造型技术;5)三维形体的实时显示和图形的并行处理技术6)真实感图形生成技术和仿真模拟系统;7)随机形体或模糊景物的模拟生成技术;8)虚拟现实环境的生成和控制技术9)三维或高维数据场的可视化技术。 2.图形的构成要素和表示方法? 答:图形的构成要素:几何要素:刻画对象的轮廓、形状等;非几何要素:刻画对象的颜色、材质等。图形的表示方法:点阵表示:是用具有颜色信息的点阵来表示图形的一种方法,它强调图形由哪些点组成,并具有什么灰度或色彩把点阵法描述的图形叫做图象;参数表示:是以计算机中所记录图形的形状参数与属性参数来表示图形的一种方法。通常把参数法描述的图形叫做图形 第二章 1.计算机图形系统由哪几部分组成,各自实现什么功能? 答:作为一个图形系统,至少应具有计算、存储、输入、输出、对话等五个方面的基本功能。计算机硬件+图形输入输出设备+计算机系统软件+图形软件。图像硬件设备通常由图形处理器、图形输入设备和输出设备构成 图形硬件包括高性能的图形计算机系统和图形设备。图形设备由图形输入设备、图形显示设备和图形硬拷贝输出设备组成。图形软件由图形应用数据结构、图形应用软件和图形支撑软件组成。图形输入设备是指可以完成定位、描画、定值、选择、拾取、字符逻辑输入功能的一类物理设备。键盘、鼠标、数字化仪、触摸屏、图像扫描仪、光笔图形显示设备:光栅扫描显示器(CRT)、液晶显示器(LCD)、等离子显示器 2.常用的图形输入、输出设备有哪些?各有何特点? 图形输入设备 1 键盘和鼠标2 跟踪球和空间球3 光笔4 数字化仪5 触摸板6 扫描仪图形输出设备显示器 1 阴极射线管显示器2 液晶显示器(LCD)3 发光二极管显示器4 等离子显示器5 等离子显示器6发光聚合物技术 3.图形软件分为几层?各个层有什么特点? 计算机图形软件的分类:通用编程软件包和专业应用图形软件包几何造型平台:ACIS和Parasolid ; 4.熟悉光栅扫描显示系统的结构。 光栅扫描的图形显示器图形显示子系统主要由三个部件组成:帧缓冲存储器(帧缓存);显示控制器; ROM BIOS。 5.了解分辨率、帧缓存、像素、像距等常用词语的含义。 像素是用来计算数码影像的一种单位,一个像素通常被视为图像的最小的完整采样。 帧缓冲存储器(Frame Buffer):简称帧缓存或显存,它是屏幕所显示画面的一个直接映象,又称为位映射图(Bit Map)或光栅。帧缓存的每一存储单元对应屏幕上的一个像素,整个帧缓存对应一帧图像。 分辨率:在水平和垂直方向上每单位长度(如英寸)所包含的像素点的数目 第三章:1.直线的常用生成算法有几种? 2.写出DDA画线算法的原理。 最基本思想:从x的左端点x0开始,向x右端点步进,步长=1(个像素)。X步进后,用y=kx+b计算相应的y坐标。最后取像素点(x, 取整round(y))作为当前点的坐标。即当x每递增1,y递增k。PS:实际代码时用Y+0.5替代取整。PS2:当|k|>1时,必须把x,y
计算机图形学实验二
实验报告 课程名称:计算机图形学 实验项目:区域填充算法 实验仪器:计算机 系别:计算机学院 专业:计算机科学与技术 班级姓名:计科1602/ 学号:2016011 日期:2018-12-8 成绩: 指导教师:
一.实验目的(Objects) 1.实现多边形的扫描线填充算法。 二.实验内容 (Contents) 实现多边形的扫描线填充算法,通过鼠标,交互的画出一个多边形,然后利用种子填充算法,填充指定的区域。不能使用任何自带的填充区域函数,只能使用画点、画线函数或是直接对图像的某个像素进行赋值操作;
三.实验内容 (Your steps or codes, Results) //widget.cpp //2016CYY Cprogramming #include"widget.h" #include
计算机图形学5套模拟题
组卷规则:每套模拟题5个问答或者计算或者证明题,每题20分。 《计算机图形学基础》模拟试题(1) 1、简述Cohen-Sutherland 裁剪方法的思想,并指出与之相比,中点裁剪方法的改进之处,及这种改进的理由。 答:Cohen-Sutherland 裁剪算法的思想是:对于每条线段分为三种情况处理。(1)若完全在窗口内,则显示该线段简称“取”之。(2)若明显在窗口外,则丢弃该 线段,简称“弃”之。(3)若线段既不满足“取”的条件,也不满足“弃”的条件,则求线段与窗口交点,在交点处把线段分为两段。其中一段完全在窗口外,可弃之。然后对另一段重复上述处理。中点分割算法的大意是,与Cohen-Sutherland 算法一样首先对线段端点进行编码,并把线段与窗口的关系分为三种情况: 全在、完全不在和线段和窗口有交。对前两种情况, 进行同样的处理。对于第三种情况,用中点分割的方法求出线段与窗口的交点。即从点出发找出距最近的可见点A和从点出发找出距最近的可见点B,两个可见点之间的连线即为线段的可见部分。从出发找最近可见点采用中点分割方法:先求出的中点,若不是显然不可见的,并且在窗口中有可见部分,则距最近的可见点一定落在上,所以用代替;否则取代替。再对新的求中点。重复上述过程,直到长度小于给定的控制常数为止,此时收敛于交点。 改进之处在于,对第三种情况,不直接解方程组求交,而是采用二分法收搜索交点。这种改进的理由是:计算机屏幕的象素通常为1024×1024,最多十次二分搜索即可倒象素级,必然找到交点。而且中点法的主要计算过程只用到加法和除2运算,效率高,也适合硬件实现。 2、在Phong 模型 中,三项分别表示何含义?公式中的各个符号的含义指什么? 答:三项分别代表环境光、漫反射光和镜面反射光。为环境光的反射光强,为理想漫反射光强,为物体对环境光的反射系数,为漫反射系数,为镜面反射系数,为高光指数,L 为光线方向,N 为法线方向,V 为视线方向,R 为光线的反射方向。
计算机图形学期末考试试卷(d卷)
计算机图形学期末考试试卷(D 卷) 一、 填空题(每空1分,共10分) 1. 图形的表示方法有两种: 点阵法 和 参数法 。 2. 目前常用的两个事实图形软件标准是OpenGL 和 DirectX 。 3. 多边形有两种表示方法: 顶点表示法 和点阵表示法。 4. 二维图形基本几何变换包括平移、 比例 、 旋转 等变换。 5. 投影可以分为 平移 投影和 透视 投影。 6. 描述一个物体需要描述其几何信息和 拓扑信息 。 7. 在Z 缓冲器消隐算法中Z 缓冲器每个单元存储的信息是每一个像素点的 深度值 。 二、 判断题(每小题1分,共10分,对的画√,错的画×) 1. 由三个顶点可以决定一段二次B 样条曲线,若三顶点共线时则所得到的曲线褪化为一条直线段。 (v ) 2. DDA (微分方程法)是Bresenham 算法的改进。( x ) 3. 插值得到的函数严格经过所给定的数据点,逼近是在某种意义上的最佳近似。( v ) 4. 齐次坐标提供了坐标系变换的有效方法,但仍然无法表示无穷远的点。( x ) 5. 若相对于某点进行比例、旋转变换,首先需要将坐标原点平移至该点,在新的坐标系下做比例或 者旋转变换,然后将原点平移回去。( v ) 6. Phong 算法的计算量要比Gouraud 算法小得多。 ( x ) 7. 将某二维图形整体放大2倍,其变换矩阵可写为???? ??????200010001。( x ) 8. 在种子填充算法中所提到的八连通区域算法同时可填充四连通区域。( v ) 9. 边缘填充算法中是将扫描线与多边形交点左方的所有像素取补。( x ) 10. 计算机图形技术是随着图形硬件设备的发展而发展起来的。( v ) 三、 选择题(每小题1分,共10分) 1.在图形变换中引入齐次坐标的目的是 B 。 A )便于实现缩放变换 B) 统一表示几种基本变换,便于计算 C )便于实现错切变换 D )无特殊目的,一直沿用而已 2. 透视投影中主灭点最多可以有几个? D A ) 0 B )1 C )2 D )3 3. 在简单光照模型中,由物体表面上的点反射到视点的光强是下述哪几项之和? C
计算机图形学课程参考文献
《计算机图形学》课程参考文献 [1 Kenneth R. Castleman, “Digital Image Processing”, Prentice-Hall International,Inc, 1996 [2] James Sharman. The Marching Cubes Algorithm[EB]. https://www.360docs.net/doc/c89784259.html,/. [3] William E. Lorensen, Harvey E. Cline. Marching Cubes: A High Resolution 3D Surface Construction Algrorithm[J].Computer Graphics, 1987, 21(4). [4] Jan Horn. Metaballs程序[CP]. http://www.sulaco.co.za. [5] 唐泽圣,等.三维数据场可视化[M].北京:清华大学出版社,1999.177-179. [6] 白燕斌,史惠康,等.OpenGL三维图形库编程指南[M].北京:机械工业出版社,1998. [7] 费广正,芦丽丹,陈立新.可视化OpenGL程序设计[M].北京:清华大学出版社,2001. [8] 田捷,包尚联,周明全.医学影像处理与分析[M].北京:电子工业出版社,2003. [9] 三维表面模型的重构、化简、压缩及其在计算机骨科手术模拟中的应用[R]. https://www.360docs.net/doc/c89784259.html,/~yike/uthesis.pdf ; [10] 首套中国数字化可视人体二维图像[DB]. http://www.chinesevisiblehuman. com/ pic/pictype.asp [11] 季雪岗,王晓辉,张宏林,等.Delphi编程疑难详解[M].北京:人民邮电出版社,2000. [12] 郑启华.PASCAL程序设计(第二版)[M].北京:清华大学出版社,1996. [13] 涂晓斌,谢平,陈海雷,蒋先刚.实用微机工程绘图实验教程[M].西南交通大学出版社,2004,4. [14] David F.Rogers.计算机图形学算法基础[M].北京:电子工业出版社,2002. [15] 李信真,车刚明,欧阳洁,封建湖.计算方法[M].西安:西北工业大学出版社,2000. [16] Paul Bourke Polygonising a scalar field [CP]. http://astronomy. https://www.360docs.net/doc/c89784259.html,.au/ ~pbourke/ modelling/polygonise/ [17] 刘骏.Delphi数字图像处理及高级应用[M].北京:科学出版社,2003. [18] 李弼程,彭天强,彭波,等.智能图像处理技术[M].北京:电子工业出版社,2004. [19] Kenneth R.Castleman著,朱志刚,石定机,等译.数字图像处理[M].北京:电子工业出版社,2002. [20] Milan Sonka, Vaclav Hlavac, Roger Boyle.Image Processing, Analysis, and Machine Vision [M].北京:人民邮电出版社,2003. [21] 阮秋奇.数字图像处理学[M]. 北京:电子工业出版社, 2001. [22] 刘宏昆,等.Delphi应用技巧与常见问题[M]. 北京:机械工业出版社, 2003. [23] 张增强,李鲲程,等.专家门诊—Delphi开发答疑300问[M].北京:人民邮电出版社,2003.6.
计算机图形学模拟题
计算机图形学试题B 2011/2012学年第一学期期末试题 一、选择题(每小题5分,共30分) 1. 分辨率为1024×1024的显示器各需要多少字节位平面数为24的帧缓存?( ) A)512KB B) 1MB C) 2MB D)3MB 2. 在直线的 Bresenham 算法中,若直线的斜率 |m|>1 ,且 y1 计算机图形学考试简答题复习 、简述计算机动画地概念,它经历了哪几个阶段地发展?(分) 计算机动画是指采用图形与图像地处理技术,借助于编程或动画制作软件生成一系列地景物画面,其中当前帧是前一帧地部分修改. 计算机动画是采用连续播放静止图像地方法产生物体运 动地效果.资料个人收集整理,勿做商业用途 年代: 二维计算机辅助动画系统 年代: 三维图形与动画地基本技术地开发; 年代: 优化年代出现地模型和阴影技术; 年代: 动力学仿真技术、三维仿真演员系统 、计算机图形学、图象处理、计算机视觉这三者之间有什么联系和区别?(分) . 数字图像处理主要研究地内容 数字图像处理()是用计算机对图像信息进行处理地一门技术,使利用计算机对图像进行各 种处理地技术和方法.资料个人收集整理,勿做商业用途 数字图像处理主要研究地内容有以下几个方面:) 图像变换由于图像阵列很大,直接在空间 域中进行处理,涉及计算量很大.因此,往往采用各种图像变换地方法,如傅立叶变换、沃尔什变换、离散余弦变换等间接处理技术,将空间域地处理转换为变换域处理,不仅可减少计算 量,而且可获得更有效地处理(如傅立叶变换可在频域中进行数字滤波处理).目前新兴研究地小波变换在时域和频域中都具有良好地局部化特性,它在图像处理中也有着广泛而有效地应用. ) 图像编码压缩图像编码压缩技术可减少描述图像地数据量(即比特数),以便节省图像传输、 处理时间和减少所占用地存储器容量.压缩可以在不失真地前提下获得,也可以在允许地失真条件下进行.编码是压缩技术中最重要地方法,它在图像处理技术中是发展最早且比较成熟地技术. ) 图像增强和复原图像增强和复原地目地是为了提高图像地质量,如去除噪声,提高图像地清晰度等.图像增强不考虑图像降质地原因,突出图像中所感兴趣地部分.如强化图像高频分量,可使图像中物体轮廓清晰,细节明显;如强化低频分量可减少图像中噪声影响.图像复原要求对图像降质地原因有一定地了解,一般讲应根据降质过程建立"降质模型",再采用某种滤波方 法,恢复或重建原来地图像. ) 图像分割图像分割是数字图像处理中地关键技术之一.图像分割 是将图像中有意义地特征部分提取出来,其有意义地特征有图像中地边缘、区域等,这是进一 步进行图像识别、分析和理解地基础.虽然目前已研究出不少边缘提取、区域分割地方法,但还没有一种普遍适用于各种图像地有效方法.因此,对图像分割地研究还在不断深入之中,是目前图像处理中研究地热点之一. ) 图像描述图像描述是图像识别和理解地必要前提.作为最简单地 二值图像可采用其几何特性描述物体地特性,一般图像地描述方法采用二维形状描述,它有边 界描述和区域描述两类方法.对于特殊地纹理图像可采用二维纹理特征描述.随着图像处理研究地深入发展,已经开始进行三维物体描述地研究,提出了体积描述、表面描述、广义圆柱体描述 等方法. ) 图像分类(识别)图像分类(识别)属于模式识别地范畴,其主要内容是图像经过某些预处理(增强、复原、压缩)后,进行图像分割和特征提取,从而进行判决分类.图像分类常采用经典地模式识别方法,有统计模式分类和句法(结构)模式分类,近年来新发展起来地模 糊模式识别和人工神经网络模式分类在图像识别中也越来越受到重视.资料个人收集整理,勿做商业用途 . 计算机图形学( ,简称)是一种使用数学算法将二维或三维图形转化为计算机显示器地栅格形 式地科学.资料个人收集整理,勿做商业用途 计算机图形学地研究内容非常广泛,如图形硬件、图形标准、图形交互技术、光栅图形生成算法、曲线曲面造型、实体造型、真实感图形计算与显示算法、非真实感绘制,以及科学计算可 视化、计算机动画、自然景物仿真、虚拟现实等. 资料个人收集整理,勿做商业用途 . 计算机视觉既是工程领域,也是科学领域中地一个富有挑战性重要研究领域.计算机视觉是一 门综合性地学科,它已经吸引了来自各个学科地研究者参加到对它地研究之中.其中包括计算机科学和工程、信号处理、物理学、应用数学和统计学,神经生理学和认知科学等. 资料个人收 集整理,勿做商业用途 计算机视觉地挑战是要为计算机和机器人开发具有与人类水平相当地视觉能力.机器视觉需要 图象信号,纹理和颜色建模,几何处理和推理,以及物体建模.一个有能力地视觉系统应该把所有这些处理都紧密地集成在一起.[]作为一门学科,计算机视觉开始于年代初,但在计算机视觉 地基本研究中地许多重要进展是在年代取得地.现在计算机视觉已成为一门不同于人工智能、图象处理、模式识别等相关领域地成熟学科.计算机视觉与人类视觉密切相关,对人类视觉有一个 2007年 工 程 图 学 学 报2007 第3期 JOURNAL OF ENGINEERING GRAPHICS No.3一种基于计算几何方法的最小包容圆求解算法 张 勇, 陈 强 (清华大学机械工程系先进成形制造重点实验室,北京 100084) 摘要:为实现点集最小包容圆(最小外接圆)的求解,将计算几何中的α-壳的概 念应用到最小包容圆的计算过程,提出了一种精确有效的最小包容圆求解算法。根据α-壳定 义及最小包容圆性质,证明当1/α等于最小包容圆半径时点集的α-壳顶点共圆,1/α小于最小 包容圆半径时α-壳不存在,1/α大于最小包容圆半径时随着1/α减小α-壳顶点数逐渐减小的规 律。将α-壳顶点数目作为搜索最小包容圆半径的依据,实现了最小包容圆半径的搜索和最小包容圆的求解。 关键词:计算机应用;优化算法;计算几何;最小包容圆;α-壳 中图分类号:TP 391 文献标识码:A 文章编号:1003-0158(2007)03-0097-05 Algorithm for Minimum Circumscribed Circle Detection Based on Computational Geometry Technique ZHANG Yong, CHEN Qiang ( Key Laboratory for Advanced Manufacturing by Materials Processing Technology, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China ) Abstract: α-hulls are applied to calculate the minimum circumscribed circle (MCC) of point set and an accurate and effective method for MCC detection is established through finding the least squares circle of the point set and iteratively approaching the MCC with recursive subdivision. Several theorems concerning the properties of α-hulls are presented. If 1/α is equal to the radius of points’ MCC, all vertices of the α-hull will be on the same circle. When 1/α is larger than the MCC’s radius, the number of vertices of α-hulls will decrease with decreasing of 1/α, and the number of vertices’ number will reach zero when 1/α is smaller than MCC’s radius. From the above rules, an algorithm for detecting MCC is developed, and experimental results show this algorithm is reliable. Key words: computer application; optimized algorithm; computational geometry; minimum circumscribed circle; α-hull 收稿日期:2005-12-20 基金项目:国家自然科学基金资助项目(50275083);高校博士点基金资助项目(20020003053) 三(8分) 1、在真实感绘制技术中,简单光照模型的反射光由哪几部分组成? 2、对于用多边形表示的物体,在光照计算时需要进行明暗处理,为什么? 3、采用Gouraud明暗处理模型计算如图所示点P的颜色值。 四(10分)如图所示,采用Cohen-Sutherland算法对线段进行裁剪时, 1、线段端点P点和Q点的编码各是多少 2、此时是否需要与窗口的边界进行求交运算,为什么(利用编码解释)? 3、如需要,可以与窗口的哪些边界求交,为什么(利用编码解释)? 五(15分)采用Bresenham算法转换直线段,起点x0(2,1)、终点x1(12,5)。 1、给出判别式d的表达式(初始条件及递推关系式): 2 x y d 2 1 -2 3 4 5 6 7 8 六(12分)如图所示三角形ABC,将其绕点(1,1)缩小1倍,采用矩阵的形式计算缩小后三角形各点的规范化齐次坐标,并用OpenGL函数编程实现。 七 计算(18分) 已知三次B 样条曲线方程为 [ ] [0,1] t 0141 030 303631331611)(3212 3 ∈?? ??? ? ? ????????????? ??? ??----? ?=+++i i i i i P P P P t t t t c , 控制顶点{}{})0,6(),1,5(),0,4(),1,3(),0,2(),1,1(),0,0(...10-==n P P P P 可生成四段B 样条曲线3210,,,c c c c 。 1)B 样条曲线和Bezier 曲线相比,最明显的特点是什么? 2)求)0(),1(),5.0(),0(),1(' '01101 c c c c c 3)如果调整控制点2P ,将对哪些曲线段产生影响 图形学作业 05计算机2班 2 郑中旭 Subject : 已知三次B 样条曲线方程为 [ ] [0,1] t 0141 030 3036313 31611)(3212 3 ∈?? ??? ? ? ????????????? ??? ??----? ?=+++i i i i i P P P P t t t t c , 控制顶点{}{})0,6(),1,5(),0,4(),1,3(),0,2(),1,1(),0,0(...10-==n P P P P 可生成四段B 样条曲线3210,,,c c c c 。 4)B 样条曲线和Bezier 曲线相比,最明显的特点是什么? 5)求)0(),1(),0(),1(),5.0(),0(),1("" 0''01101 1 c c c c c c c 。 北京语言大学网络教育学院 《计算机图形学》模拟试卷一 注意: 1.试卷保密,考生不得将试卷带出考场或撕页,否则成绩作废。请监考老师负责监督。 2.请各位考生注意考试纪律,考试作弊全部成绩以零分计算。 3.本试卷满分100分,答题时间为90分钟。 4.本试卷分为试题卷和答题卷,所有答案必须答在答题卷上,答在试题卷上不给分。 一、【单项选择题】(本大题共10小题,每小题2分,共20分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在答题卷相应题号处。 1、计算机图形学与计算机图像学(图像处理)的关系是( B )。 [A] 计算机图形学是基础,计算机图像学是其发展 [B] 不同的学科,研究对象和数学基础都不同,但它们之间也有可相互转换部分 [C] 同一学科在不同场合的不同称呼而已 [D] 完全不同的学科,两者毫不相干 2、多边形填充算法中,错误的描述是( D )。 [A] 扫描线算法对每个象素只访问一次,主要缺点是对各种表的维持和排序的耗费较大 [B] 边填充算法基本思想是对于每一条扫描线与多边形的交点,将其右方象素取补 [C] 边填充算法较适合于帧缓冲存储器的图形系统 [D] 边标志算法也不能解决象素被重复访问的缺点 3、在多边形的逐边裁剪法中,对于某条多边形的边(方向为从端点S到端点P)与某条裁剪线(窗口的某一边)的比较结果共有以下四种情况,分别需输出一些顶点.哪种情况下输出的顶点是错误的?( C ) [A] S和P均在可见的一侧,则输出点P [B] S和P均在不可见的一侧,,则输出0个顶点 [C] S在可见一侧,,P在不可见一侧,则输出线段SP与裁剪线的交点和S [D] S在不可见的一侧,P在可见的一侧,则输出线段SP与裁剪线的交点和P 4、由k个控制顶点Pi(i=1,… k)所决定的n次B样条曲线,由( C )段n次B 样条曲线段光滑连接而成。 [A] k-n-2[B] k-n-1 [C] k-n[D] k-n+1 5、凸多边形窗口的二维线裁剪Cyrus-Beck算法中,若( C ),说明P1P2与第i 条边平行。 [A] N i·(P2-P1)<0[B] N i·(P2-P1)> 0 [C] N i·(P2-P1)=0[D] N i·(P2-P1) ≠0 计算机图形学期末真题+答案(两套) 一选择题: 1、以计算机中所记录的形状参数与属性参数来表示图形的一种方法叫做( ),一般把它描述的图形叫做( );而 用具有灰度或颜色信息的点阵来表示图形的一种方法是( ),它强调图形由哪些点组成,并具有什么灰度或色彩,一般把它描述的图形叫做( )。A A 参数法、图形、点阵法、图像 B 点阵法、图像、参数法、图形 C 参数法、图像、点阵法、图形 D 点阵法、图形、参数法、图像 2、下列设备中属于图形输出设备的是( B ) ○ 1鼠标○2LCD ○3键盘○4 LED ○ 5打印机○6扫描仪○7绘图仪○8触摸屏 A ○ 1○3○6○8 B ○2○4○5○7 C ○2○5○6○7 D ○4○6○7○8 3. 下面给出的四个选项中( D )是绕Z 轴负向旋转θ的三维旋转变换矩阵。 A ????????? ???-10 00 0cos sin 00sin cos 00001θθθθ B ????? ???? ???-10000cos 0sin 00100sin 0cos θθθθ C ????? ???? ???-10 010000cos sin 00sin cos θθθθ D ????? ???????-10 010000cos sin 00sin cos θθθθ 4. 下面给出的四个选项中,( A )不是Bezier 曲线具有的性质。 A 局部性 B 几何不变性 C 变差缩减性 D 凸包性 5、B 样条曲线中,按照节点矢量T 的不同可以将B 样条分为均匀B 样条,开放均匀B 样条和非均匀B 样条,以下 选项中属于开放均匀B 样条节点矢量的是(C )。 A 、T =(0,1,2,3,4,5,6) B 、T =(0,0,1,1,2,2,3,3) C 、T =(0,0,0,1,2,3,4,5,5,5) D 、T =(0,0.1,0.2,0.2,0.5,1) 二、填空题(共8小题,每空1分,总计25分,请直接在原题上作答) 1、一个交互式计算机图形系统应具有( 计算 )、( 存储 )、( 对话 )、( 输入 )、 ( 输出 )等五个方面的功能。 2. 将三维物体变为二维图形的变换称为(投影变换),其有两种基本方式:(平行投影)、(透视投影)。 3、形体的定义和图形的输入输出都是在一定的坐标系下进行的,通常这些坐标系分为:建模坐标系, (用户坐标系),(观察坐标系),规格化设备坐标系和 (设备坐标系)。 4、X 扫描线算法中,每次用一条扫描线进行填充,对一条扫描线填充的过程可分为4个步骤:(求交)、(排序)、(交点配对)、(区间填色)。 5、平面几何投影可分为两大类,分别是:(透视投影),(平行投影)。计算机图形学考试简答题复习
一种基于计算几何方法的最小包容圆求解算法.kdh
计算机图形学试卷
计算机图形学模拟试卷一资料
计算机图形学试题、真题(完整版详细解析)