移动互联网嵌入式物联网人工智能创新实验室:体脂体重秤系统
1.1体脂体重秤系统套件
1.1.1图文介绍
●基本介绍:
体脂体重秤(ZI-SteelyardS)搭载高精度重量测量系统,测量精度0.1g,量程1000g;体脂体重还搭载双触点式体脂测量系统。体脂体重数据可通过板载OLED直接显示,也可通过蓝牙传输至手机APP显示,支持历史数据查询和身体BMI指数计算等。
体脂体重秤系统主要涉及到如下技术内容:
1)智能产品硬件基础:电路原理图基础、嵌入式、传感器技术;
2)嵌入式操作系统基础:包括Contiki操作系统;
3)无线传感网络基础:BLE低功耗蓝牙;
4)云平台交互技术:智云API、ZXBee通信协议;
5)应用层开发技术:Android应用开发、HTML5 web 开发;
6)体脂体重称量技术:体脂测量方案、高精度ADC调教技术;
7)实训课程案例包:体脂体重秤系统设计。
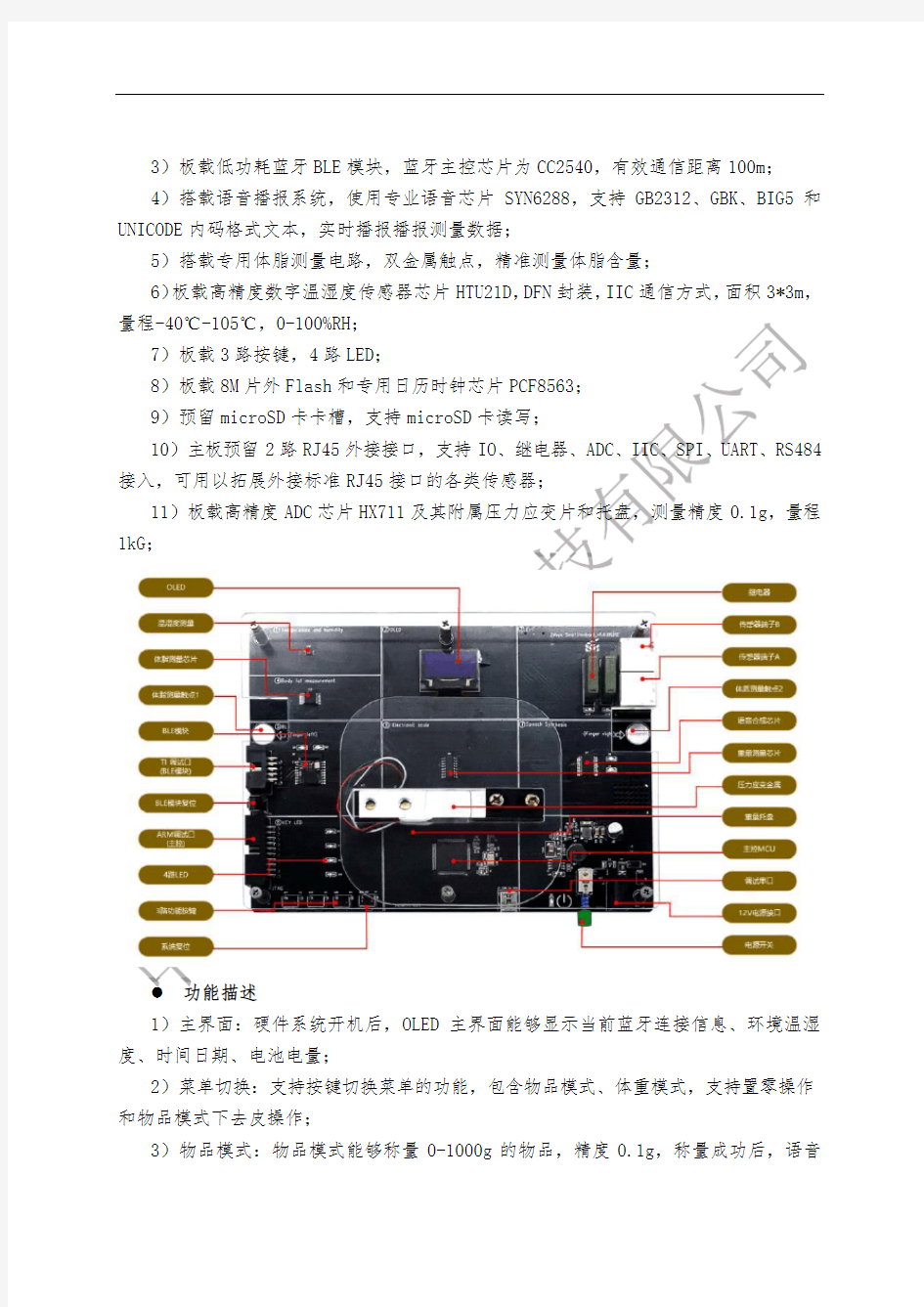
●硬件描述
1)设备主系统:ARM Cortex-M4 STM32F407,集成USB串口和20PIN ARM JTAG调试接口,Contiki-3.0 OS;
2)搭载0.96英寸OLED显示屏,分辨率128*64,用以显示当前测量数据信息,支持多屏切换;
- 1 -
3)板载低功耗蓝牙BLE模块,蓝牙主控芯片为CC2540,有效通信距离100m;
4)搭载语音播报系统,使用专业语音芯片SYN6288,支持GB2312、GBK、BIG5和UNICODE内码格式文本,实时播报播报测量数据;
5)搭载专用体脂测量电路,双金属触点,精准测量体脂含量;
6)板载高精度数字温湿度传感器芯片HTU21D,DFN封装,IIC通信方式,面积3*3m,量程-40℃-105℃,0-100%RH;
7)板载3路按键,4路LED;
8)板载8M片外Flash和专用日历时钟芯片PCF8563;
9)预留microSD卡卡槽,支持microSD卡读写;
10)主板预留2路RJ45外接接口,支持IO、继电器、ADC、IIC、SPI、UART、RS484接入,可用以拓展外接标准RJ45接口的各类传感器;
11)板载高精度ADC芯片HX711及其附属压力应变片和托盘,测量精度0.1g,量程1kG;
功能描述
1)主界面:硬件系统开机后,OLED主界面能够显示当前蓝牙连接信息、环境温湿度、时间日期、电池电量;
2)菜单切换:支持按键切换菜单的功能,包含物品模式、体重模式,支持置零操作和物品模式下去皮操作;
3)物品模式:物品模式能够称量0-1000g的物品,精度0.1g,称量成功后,语音
播报提示;
4)体重模式:体重模式能够模拟对体重的称量,称量完毕后,语音播报提示,支持同上一次体重进行对比和胖瘦提示;
5)出厂校准:支持出厂校准功能,校准成功后,自动进入主界面,程序烧写后只需要校准一次;
1
11)闹钟设置:支持闹钟设置,点击保存后,自动将闹钟信息同步到系统板卡;
14)数据交互:硬件板卡通过BLE同控制软件进行交互,数据可存储于本地,也可存储于云端;
15)AI功能:支持语音唤醒控制软件,支持语音数据查询和回应。
1.1.2产品参数
《智能产品开发与设
计》
八数码问题求解--实验报告讲解
实验报告 一、实验问题 八数码问题求解 二、实验软件 VC6.0 编程语言或其它编程语言 三、实验目的 1. 熟悉人工智能系统中的问题求解过程; 2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用; 3. 熟悉对八数码问题的建模、求解及编程语言的应用。 四、实验数据及步骤 (一、)实验内容 八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。 2 8 3 1 2 3 1 4 8 4 7 6 5 7 6 5 (a) 初始状态(b) 目标状态 图1 八数码问题示意图 (二、)基本数据结构分析和实现 1.结点状态 我采用了struct Node数据类型 typedef struct _Node{
int digit[ROW][COL]; int dist; // distance between one state and the destination一 个表和目的表的距离 int dep; // the depth of node深度 // So the comment function = dist + dep.估价函数值 int index; // point to the location of parent父节点的位置 } Node; 2.发生器函数 定义的发生器函数由以下的四种操作组成: (1)将当前状态的空格上移 Node node_up; Assign(node_up, index);//向上扩展的节点 int dist_up = MAXDISTANCE; (2)将当前状态的空格下移 Node node_down; Assign(node_down, index);//向下扩展的节点 int dist_down = MAXDISTANCE; (3)将当前状态的空格左移 Node node_left; Assign(node_left, index);//向左扩展的节点 int dist_left = MAXDISTANCE; (4)将当前状态的空格右移 Node node_right; Assign(node_right, index);//向右扩展的节点 int dist_right = MAXDISTANCE; 通过定义结点状态和发生器函数,就解决了8数码问题的隐式图的生成问题。接下来就是搜索了。 3.图的搜索策略 经过分析,8数码问题中可采用的搜速策略共有:1.广度优先搜索、2.深度优先搜索、2.有界深度优先搜索、4.最好优先搜索、5.局部择优搜索,一共五种。其中,广度优先搜索法是可采纳的,有界深度优先搜索法是不完备的,最好优先和局部择优搜索法是启发式搜索法。 实验时,采用了广度(宽度)优先搜索来实现。 (三、)广度(宽度)优先搜索原理 1. 状态空间盲目搜索——宽度优先搜索 其基本思想是,从初始节点开始,向下逐层对节点进形依次扩展,并考察它是否为目标节点,再对下层节点进行扩展(或搜索)之前,必须完成对当层的所有节点的扩展。再搜索过程中,未扩展节点表OPEN中的节点排序准则是:先进入的节点排在前面,后进入的节点排在后面。其搜索过程如图(1)所示。
浙江大学人工智能研究所(以下简称AI)创建于1981年,是专概要
浙江大学人工智能研究所(以下简称AI)创建于1981年,是专门从事科学研究与培养高层次计算机专业人才的科研机构。全所现有各类研究人员46名,其中教授15名(含中国工程院院士1名,长江计划特聘教授1名,博士生导师10名),副教授22名,讲师10名。同时设有计算机应用技术博士点、硕士点和计算机科学与技术博士后流动站。现任研究所所长为浙江大学校长、中国工程院院士潘云鹤教授,副所长为董金祥教授、朱淼良教授和周昌乐教授,学术委员会主任为何志均教授。 研究所下设: 知识工程研究室、智能CAD研究室、CAD&CG研究室、计算机视觉与智能机器人研究室、智能信息管理与决策研究室等5个研究室、实验室,以及资料室、办公室等机构。 主要研究方向: 人工智能理论,形象思维,计算机图形学(CG)与计算机辅助设计(CAD),计算机集成制造(CIMS)及其它先进制造技术,智能CAD,信息智能和决策支持,计算机视觉与智能机器人,多媒体技术,工程数据库,智能控制,计算机网络和信息通讯,科学可视化,分布式知识库,操作系统,数据库,管理信息系统,计算机辅助工业设计等。 学术带头人: Founded in 1981, the Artificial Intelligence Research Institute (AIRI) is an institution specializing in scientific research and high-level computer talent cultivating. Presently it has a staff of 46. Among them, there are 15 professors ( including one member of Chinese Engineering Academy, one member of China Education Ministry’s Cheung Kong (Chiang Jiang) Scholar,ten doctoral supervisors), 22 associate professors and 10 lecturers. In addition to the Ph.D and Master degree programs, it also offers post doctoral program in computer science and technology. Chief of Institution is Prof. Pan Y unhe, who is also president of Zhejiang University and a member of Chinese Engineering Academy. Prof. Dong Jinxiang and Prof. Zhu Miaoliang and Prof. Zhou Changle are vice chiefs of the Institution. Prof. He Zhijun is chairman of academia committee of AIRI. The AIRI consists of one reference room, one administrative office and five research labs, including Knowledge Engineering Lab, Intelligence CAD Lab, CAD&CG Lab, Computer vision & Robotics Labs, Intelligence Information Management and Decision Lab. The main research scope is as follows: Artificial Intelligence theory Imagery thinking Computer Graphics and Computer Aided Design Computer Integrated Manufacture system (CIMS) and other Advanced Manufacturing Technologies Intelligence CAD Information Intelligence and policy support Computer Vision and Robotics Multimedia Technology Engineering Database Intelligent Control Computer Network and Communication Scientific Visualization Distributed Knowledge Database
八数码问题人工智能实验报告
基于人工智能的状态空间搜索策略研究 ——八数码问题求解 (一)实验软件 TC2.0 或VC6.0编程语言或其它编程语言 (二)实验目的 1. 熟悉人工智能系统中的问题求解过程; 2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用; 3. 熟悉对八数码问题的建模、求解及编程语言的应用。 (三)需要的预备知识 1. 熟悉TC 2.0或VC6.0 编程语言或者其它编程语言; 2. 熟悉状态空间的宽度优先搜索、深度优先搜索和启发式搜索算法; 3. 熟悉计算机语言对常用数据结构如链表、队列等的描述应用; 4. 熟悉计算机常用人机接口设计。 (四)实验数据及步骤 1. 实验内容 八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。 图1 八数码问题示意图 请任选一种盲目搜索算法(深度优先搜索或宽度优先搜索)或任选一种启发式搜索方法(A 算法或A* 算法)编程求解八数码问题(初始状态任选),并对实验结果进行分析,得出合理的结论。 2. 实验步骤 (1)分析算法基本原理和基本流程; 程序采用宽度优先搜索算法,基本流程如下:
(2)确定对问题描述的基本数据结构,如Open表和Closed表等;
(3)编写算符运算、目标比较等函数; (4)编写输入、输出接口; (5)全部模块联调; (6)撰写实验报告。 (五)实验报告要求 所撰写的实验报告必须包含以下内容: 1. 算法基本原理和流程框图; 2. 基本数据结构分析和实现; 3. 编写程序的各个子模块,按模块编写文档,含每个模块的建立时间、功能、输入输出参数意义和与其它模块联系等; 4. 程序运行结果,含使用的搜索算法及搜索路径等; 5. 实验结果分析; 6. 结论; 7. 提供全部源程序及软件的可执行程序。 附:实验报告格式 一、实验问题 二、实验目的 三、实验原理 四、程序框图 五、实验结果及分析 六、结论
stem课程实验室建设方案(20200515164750)
stem课程实验室建设方案 一、政策背景 国务院颁布的《新一代人工智能发展规划》中指出:“人工智能成为国际竞争的新焦点,应逐步开展全民智能教育项目,在中小学阶段设置人工智能相关课程、逐步推广编程教育、建设人工智能学科,培养复合型人才,形成我国人工智能人才高地。” 战略目标: 第一步 ----- 2020年 ----- 人工智能产业成为新的重要经济增长点。技术应用成为改善民生的新途径。 第二步 ----- 2025年 ----- 人工智能成为带动我国产业升级和经济转型的主要动力。 第三步 ----- 2030年 ----- 我国将成为世界主要人工智能创新中心,为跻身创新型国家前列和经济强国奠定重要基础。 二、如何建设stem课程实验室
如何搭stem课程实验室,STEAM实验室正在全国各地的学校涌现。Stem课程创客实验室为教育实践提供新的创新方法,鼓励 学生设计、实验、建设和发明。 创客实验室不仅仅是科学实验室,木工作坊,计算机实验室或艺术室,而是可能包含所有这些空间中的元素。因此,它的设计必 须适应各种活动需求以及活动的多样性和趣味性,这个在制作和探索过程非常重要,这就是STEM实验室与一次性空间的区别。 三、中小学stem课程包含有哪些内容,以智库教育为例: 四、备注 由于每个学校的stem课程实验室及其适应的活动可能会有所不同,也要看学校的具体的需求和要求。建设创客实验室功能和使用最为关键的步骤之一,学校可以与创客企业合作,阐明满足这些需求。或者,访问其他创客空间或实验室可以得到一些宝贵的 意见。作为创客教育设备提供商,会有很多合作的创客空间与
steam实验室可供参观。
八数码实验报告人工智能课设报告
学生实验报告 实验课名称:人工智能 实验名称: 八数码 专业名称:计算机科学与技术 班级: 学号: 学生姓名: 教师姓名: 2010 年10 月20日 一.实验内容 用OPEN表和CLOSED表解决搜索问题。 二.实验题目 采用启发式算法(如A*算法)求解八数码问题。 三.实验要求 1.必须使用OPEN表和CLOSED表。 2.明确给出问题描述。系统初始状态。目标状态和启发式函数。 3.除了初始状态以外,至少搜索四层。 4.给出解路径(解图)。 四.实验过程 ①问题:初始状态到目标状态是否可解如何判断? 答:实验过程自己给出的初始状态使用A*算法求解,并不是所有的初始状态都可解到达目标状态。因为八数码问题其实是0~9的一个排列,而排列有奇排列和偶排列,从奇排列不能转化为偶排列或者相反。例如:函数f(s)表示s前比s 小的数字的数目(s 则当f(a8)+f(a7)+……+f(a1)为偶数时才能重排成,所以嘛,上面那个有解的. ②问题描述: 在3X3的九宫格棋盘上,摆有8个将牌,每一个将牌都刻有1~8数码中的某一个数码。棋盘中留有一个空格,允许周围的某一个将牌向空格移动,这样通过移动将牌就可以不断地改变将牌的布局。这种游戏的求解的问题是:给定一种处
世的将牌布局或结构和一个目标的布局,问如何移动将牌,实现从从初始状态到目标状态的转变。 下面给出初始状态和目标状态: 初始状态:Array 目标状态: 评价函数f(n)形式为:f(n)=g(n)+h(n),其中g(n)是节点所处的深度, h(n)是启发式函数,这里启发式函数h(n)表示“不在位”的将牌个数,这时f(n) 注意:移动规则为左-→上→右→下。 ③搜索过程: 因此可得解路径:S(4)→B(4)→D(5)→E(5)→I(5)→K(5)→L(5). ④得到OPEN表和CLOSED表 OPEN表
人工智能-图像识别与人工智能研究所XXXX年研究生招生简章考研专业目录 精品
图像识别与人工智能研究所 图像识别与人工智能研究所(以下简称图像所)于1978年由教育部和航天部共同批准建立、直属于华中科技大学的一所融研究、教学为一体,以图像识别和人工智能为研究方向的研究机构。建所30余年来,图像所始终瞄准航天、航空和信息技术领域的国家目标,进行应用基础和应用技术的研究,在国内的模式识别与智能系统学科具有明显的研究特色和学科优势,在航天航空的智能信息处理领域具有较高的知名度。图像所分别于1984年、1990年获得硕士和博士学位授予权,20XX年被批准为湖北省重点学科,20XX年被批准为国家重点二级学科“模式识别与智能控制”,是该二级学科全国5个重点学科单位之一。1993年获批“图像信息处理与智能控制”国家教委开发实验室,1999年升格为教育部重点实验室。1998年3月由中国航天工业总公司和国家教委共同批准命名为“中国航天图像识别技术研究所”,与航天工业总公司共建。20XX年12月获批成立“多谱信息处理技术”国家级重点实验室。 图像所经过多年的建设已形成先进、配套的科研、教学、开发环境和雄厚的技术储备,有一支层次高,年龄、专业结构合理的科研教学梯队。该所现有科研、教学人员40余人,其中双聘院士1人,“长江学者”讲座教授1名,教授10名、副教授13名,入选“新世纪优秀人才支持计划”1人。87%的教师拥有博士学位,76%为45岁以下青年教师。20XX年被命名为国家级科技创新团队。除了本所的教师队伍外,图像所还聘请了航天科技集团的科学院院士沈绪榜教授、美国西北大学终生教授、计算机视觉领域的世界知名学者吴郢教授等作为图像所兼职博导培养博士生。目前本专业在读硕士生、博士生350余人。 图像所在“模式识别与智能系统”学科点上现有的研究方向是:计算机视觉与应用、模式识别与图像分析、图像处理系统及应用、医学成像与处理、人工智能与认知科学、集成电路及系统芯片的研究与设计以及微纳光电技术。在“导航制导与控制”学科点上现有的研究方向是:多谱寻的制导、多谱匹配制导、多谱目标探测以及制导信息处理芯片设计。在“信息安全”学科点上现有的研究方向是:混沌密码理论与技术(包括密码算法的IC设计),无线移动网络的安全技术,网络主动防御技术以及城市交通智能管理与安全信息服务技术。2001年以来,图像所培养博士135名、硕士540名,6人获得湖北省优秀博士论文,5人获得湖北省优秀硕士论文。图像所现有在读硕士研究生235人,博士研究生118人。 图像所在培养研究生的同时,承担了大量的国家级科研项目,取得了一大批科研成果。20XX年至今,图像所已经承担了包含国家自然科学基金、973、863、国家级预研计划等在
人工智能 八数码实验
人工智能作业八数码问题
一、题目 八数码问题: 初始状态图:目标状态图: 二、算符与状态空间 算符:左、上、右、下 状态空间: 状态:A=(X0,X1,X2,X3,X4,X5,X6,X7,X8) 初始状态:S0=(0,4,1,5,2,8,3,6,7); 目标状态:Sg=(0,1,7,5,2,8,3,6,4)。
三、搜索树 22 求解: 四、Open 表,Closed 表 Open 表: Closed 表:
五、程序代码 /* 3_13.pro eight puzzle */ trace DOMAINS state=st(in,in,in,in,in,in,in,in,in) in=integer DATABASE-mydatabase open(state,integer) closed(integer,state,integer) res(state) mark(state) fail_ PREDICATES solve search(state,state) result searching step4(integer,state) step56(integer,state) equal(state,state) repeat resulting(integer) rule(state,state) GOAL solve. CLAUSES solve:-search(st(0,4,1,5,2,8,3,6,7),st(0,1,7,5,2,8,3,6,4)),result. search(Begin,End):-retractall(_,mydatabase), assert(closed(0,Begin,0)),assert(open(Begin,0)),
盘点:从斯坦福人工智能实验室走出的人物及创举
盘点:从斯坦福人工智能实验室走出的人物及创举 来源:宇辰网 成立至今,斯坦福人工智能实验室的历史已逾50年,在人工智能漫长的发展岁月里,从这座实验室走出了许多杰出人物和作品。 1.图像识别 李飞飞/图来源网络 斯坦福大学人工智能实验室和视觉实验室(Stanford Artificial Intelligence Laboratory,SAIL)华裔教授李飞飞,多年来致力于解决图像识别、机器学习和语言处理等人工智能领域的棘手难题。 2007-2009年,李飞飞及其团队通过网络众包技术,建立起了含有1500万张照片、涵盖22000种物品的全球最大图像识别数据库Imagenet。
“这些物品是根据日常英语单词进行分类组织的。无论是在质量上还是数量上,这都是一个规模空前的数据库。在"猫"这个对象中,我们有超过62000只猫,长相各异,姿势五花八门,而且涵盖了各种品种的家猫和野猫。我们对ImageNet收集到的图片感到异常兴奋,而且我们希望整个研究界能从中受益,所以以一种和TED一样的方式,我们公开了整个数据库,免费提供给全世界的研究团体。”Li Feifei在TED演讲上说:“事后我们再来看,这个利用大数据来训练计算机算法的思路,也许现在看起来很普通,但回到2007年时,它就不那么寻常了。我们在这段旅程上孤独地前行了很久。” 图像识别之后,李飞飞又开启了Visual Genome(视觉基因组)计划,要把语义和图像结合起来,推动人工智能的进一步发展。 2.人工神经网络 吴恩达/图来源网络
机器学习领域专家,斯坦福人工智能实验室教授,在线教育平台Coursera 的联合创始人吴恩达,曾于2011年创建并领导了谷歌的深度学习团队,打造出大规模人工神经网络。该神经网路总共由16000 个处理器连接而成,内部共有10 亿个节点,能够在没有任何先验知识的情况下自主学习。这个项目的技术已经被应用到了安卓操作系统的语音识别系统上。 人工神经网络是20世纪80年代以来人工智能领域兴起的研究热点。它从信息处理角度对人脑神经元网络进行抽象,建立某种简单模型,按不同的连接方式组成不同的网络。近十多年来,随着研究工作的不断深入,人工神经网络取得了显著进展,现已应用于模式识别、智能机器人、生物、医学、经济等领域,成功地解决了很多现代计算机难以解决的实际问题。 3.开源机器人技术软件平台 ROS/图来源网络
中小学无人机创客实验室建设方案
中小学无人机创客实验室 建设方案 Prepared on 24 November 2020
空中机器人中小学创客实验室建设方案 (初稿) 河北恒拓电子科技有限公司 2017年8月17日 一、背景 空中机器人又叫无人机,近年来在军用机器人家族中,无人机是科研活动最活跃、技术进步最大、研究及采购经费投入最多、实战经验最丰富的领域。 近些年来,空中机器人从军用走向了民用,同时也衍生出了多种多样的形态和用途。目前使用最为广泛的是多旋翼飞行器,多旋翼飞行器以其简单的结构、超强的机动性、独特的飞行方式以及军事和民事领域展现出的巨大应用价值,引起了国内外学者以及科研机构的广泛关注,并迅速成为目前国际上研究的热点之一,越来越多的人员对其研究以及学习。 从教育部获悉,2017年本科院校新增7个无人机相关专业,从侧面印证了无人机行业的前瞻性,无论是现在还是未来无人机智控科技在社会上将掀起一阵新的科技浪潮。 国务院印发《新一代人工智能发展规划》,《规划》提出要在中小学阶段设置人工智能相关课程,推动人工智能领域一级学科建设,把高端人才队伍建设作为人工智能发展的重中之重,完善人工智能教育体系等内容。 2017年《义务教育小学科学课程标准》提出,为进一步加强小学科学教育,从今年秋季开始,小学科学课程起始年级调整为一年级。并且今年国务院印发《新一代人工智能发展规划》,其中明确指出应逐步开展全民智能教育项目,在中小学阶段设置人工智能相关课程、逐步推广编程教育、建设人工智能学科,培养复合型人才,形成我国人工智能人才高地。
中国STEM教育协作联盟倡导的“以人文引领的学科融合性教育”是STEAM教育理念的延伸,将给国内的中小学人工智能学科教育带来新的探索和尝试。 二、理念和必要性 随着无人机尤其是多旋翼飞行器技术的不断发展,无人机的用途已经深入各行各业,尤其我国无人机行业发展速度很快,对于人才的需求急剧增加,据估算,我国2018年需要的无人机操作维护人员至少达到20万人未来甚至更多,为面对未来人才的急剧需求和面对日新月异的科技变化时代,我国对人工智能基础教育项目的重视越来越大,而国务院印发的《新一代人工智能发展规划》更是提出了对中小学人工智能相关教育的战略规划,为培养未来的人工智能人才,人工智能基础教育显得尤为重要,而具体的体现便是空中机器人创客实验室。 本方案根据中小学自身的特点,结合本公司产品情况进行中小学科普课程设计,实验室设施不仅可以满足中小学生对空中机器人有一定系统的认识,掌握一定的基础理论知识,还能在平时的课程练习中习得飞行技能和一定专业的编程知识。从认识到组装,从组装到趣味飞行,从趣味飞行到功能性任务完成,再到能力的升华,整个过程一气呵成可谓一举多得。 三、空中机器人创客教育实验室建设目标 建设具有自身特色的空中机器人创客教育实验室,以此为依托促进学校的人工智能基础教育发展和锻炼学生的思维能力以及对人工智能有一定的认识和学习。 教师可以依托实验室的硬件以及技术环境进行课程设计和科学理论的普及,进一步促进学校科技智能教育的发展和相关学科课程的升华,促进学校教学能力的提升,为学校的教学发展增添一抹科技亮色。
图像识别与人工智能研究所发展规划报告
图像所学科建设与发展规划 根据学校建设世界知名高水平大学的发展目标,特制定图像所相应的学科建设与发展规划,以推动本学科的跨越式发展。 一、学科建设总体目标 (一)学科基础 图像识别与人工智能研究所(简称图像所)将继续以跻身于我国的国防科技的发展为切入点,从事发展巡航导弹中制导、末制导关键技术,承担相关预先研究和攻关科研任务为学科建设的主攻方向。 (1)目前本学科点共有五个研究方向: “计算机视觉与应用”、 “成像自动目标识别与精确制导技术”、 “多谱成像与遥感图像处理”、 “人工智能与思维科学” “面向模式识别的专用处理机与IC芯片设计”。 (2)本学科点现有科研人员26人,其中教授(含博士生导师)7人,副教授7人。科研教学梯队层次高,年龄、专业结构合理。现有教学科研用房4000 平方米。实验设备固定资产5000余万元,已初步形成先进、配套的教学、科研、开发环境和雄厚的技术储备。 (3)学科特点 模式识别与智能系统是信息科学技术领域中发展最迅速的前沿领域之一。
来自不同成像传感器的不同谱段的图像信号能全面揭示客观世界的各种特性,智能控制是人工智能与自动控制相结合的现代控制理论和技术,图像模式处理、识别与智能控制的结合构成了智能信息系统和智能自动化系统发展的基础,不仅科学意义深远而且有十分广阔的应用前景。本学科点的主要特色是紧密结合航天、航空和信息技术领域的国家目标,进行应用基础和应用技术的研究和开发,重点研究多谱段图像模式信息的获取、表示、处理、分析与智能系统领域的基础理论与关键技术,同时培养和造就本领域高层次、高质量的科技人才。本学科点具有特色和优势的研究方向是: ·计算机视觉与应用 在基于信息融合的信号处理、基于视觉、力觉和超声波接近觉的多传感器机器人系统和飞行器三维航迹规划技术方面具有特色,承担了国家重大型号XY-20末制导航迹规划攻关项目并进入型号研制。 ·成像自动目标识别与精确制导技术 开展面向复杂背景和随机环境下成像自动目标检测、识别、跟踪的新理论、新方法、新算法和新系统的研究,其特色是瞄准有关国家安全的国家目标,紧密结合航天航空高技术发展,在基于图象和图象序列的自动目标识别,景象匹配定位等精确制导领域开展应用基础和高技术的研究,并将一系列高水平成果应用于国防高技术武器系统中。 ·多谱成像与遥感图像处理 研究微波辐射特性及成像技术、激光雷达成像信号处理和遥感图像处理与
人工智能实训室建设方案
人工智能实验室 2021年1月 武汉唯众智创科技有限公司
人工智能实验室建设方案 一、专业背景 人工智能(Artificial Intelligence),它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等。 人工智能的实际应用有:机器视觉,指纹识别,人脸识别,视网膜识别,虹膜识别,掌纹识别,专家系统,自动规划,智能搜索,定理证明,博弈,自动程序设计,智能控制,机器人学,语言和图像理解,遗传编程等。 如今处于风口上的人工智能产业界,受到了众多企业的追捧。截至2019年6月,中国人工智能企业超过1200家,位居全球第二。但我国人工智能行业并未摆脱人才稀缺的发展短板,专业人才稀缺严重。根据猎聘发布的《猎聘2019年中国AI&大数据人才就业趋势报告》,中国人工智能人才缺口超过500万。为了满足人工智能产业界对人才的迫切需求,国家相继出台了多项政策方针,引导高校尽快设置人工智能相关专业,加大人工智能人才培养力度。2019年3月,35所高校获批建设人工智能本科专业。2019年10月18日在教育部发布的《普通高等学校高等职业教育(专科)专业目录》2019年增补专业中,增补了人工智能技术服务专科专业。 根据教育部《普通高等学校高等职业教育(专科)专业设置管理办法》,在相关学校和行业提交增补专业建议的基础上,教育部组织研究确定了2019年度增补专业共9个,自2020年起执行。在高等职业教育行业目录中,正式宣布人工智能技术服务专业诞生,专业代码610217。 该专业建设以人工智能技术与应用素质培养为基础,以人工智能技术与应用能力为培养主线,将人工智能技术服务专业技能知识和职业资格认证相结合,构建专业的理论教学体系和实践能力培养体系。采取多种形式,通过实施“双证书”和“多证书”制,培养社会所需的实用型人才。2018年4月2日,教育部印发了《高等学校人工智能创新行动计划》,行动计划中要求各大高校加快人工智能科技创新基地。因此,在高职院校设立人工智能专业迫在眉睫。
人工智能试验-八数码难题
昆明理工大学信息工程与自动化学院学生实验报告 (2012 —2013 学年第 1 学期) 课程名称:人工智能开课实验室:信自楼442 2012 年10月 24日 一、上机目的及内容 1.上机内容 用确定性推理算法求解教材65-66页介绍的八数码难题。 2.上机目的 (1)复习程序设计和数据结构课程的相关知识,实现课程间的平滑过渡; (2)掌握并实现在小规模状态空间中进行图搜索的方法; (3)理解并掌握图搜索的技术要点。 二、实验原理及基本技术路线图(方框原理图或程序流程图) (1)设计并实现程序,求解出正确的解答路径; (2)对所设计的算法采用大O符号进行时间复杂性和空间复杂性分析; (3)对一般图搜索的技术要点和技术难点进行评述性分析。 问题描述: 在3×3组成的九宫格棋盘上,摆有八个将牌,每一个将牌都刻有1-8八个数码中的某一个数码。棋盘中留有一个空格,允许其周围的某一个将牌向空格移动,这样通过移动将牌就可以 不断改变将牌的布局。这种游戏求解的问题是:给定一种初始的将牌布局或结构(称初始状 态)和一个目标的布局(称目标状态),问如何移动将牌,实现从初始状态到目标状态的转变。 初始状态:8个数字将牌和空格在九宫格棋盘上的所有格局组成了问题的状态空间。其中,状态空间中的任一种状态都可以作为初始状态。 后继函数: 通过移动空格(上、下、左、右)和周围的任一棋子一次,到达新的合法状态。 目标测试: 比较当前状态和目标状态的格局是否一致。 路径消耗: 每一步的耗散值为1,因此整个路径的耗散值是从起始状态到目标状态的棋子移动的总步数。
三、所用仪器、材料(设备名称、型号、规格等或使用软件) 1台PC及VISUAL C++6.0软件 四、实验方法、步骤(或:程序代码或操作过程) 数据结构 static int target[9]={1,2,3,8,0,4,7,6,5}; 全局静态变量,表示目标状态class eight_num { private: int num[9]; 定义八数码的初始状态 int not_in_position_num; 定义不在正确位置八数码的个数 int deapth; 定义了搜索的深度 int eva_function; 评价函数的值,每次选取最小的进行扩展public:
人工智能实验八数码问题的求解策略
人工智能上机实验二八数码问题的求解策略1、广度优先算法程序截图: 2、最佳优先算法程序截图:
(接上图) 3、程序代码: ①广度优先算法: (defun init-search (start goal) (declare (special *open*)) (declare (special *closed*)) (declare (special *moves*)) (declare (special *start*)) (declare (special *goal*)) (let (tuple) (setq tuple (cons start '(nil)) ) (setq *open* (list tuple) ) (setq *closed* nil ) (setq *start* start) (setq *goal* goal) (setq *moves* '(blank-left blank-up blank-right blank-down)) (breadth-first-search))) (defun breadth-first-search () (declare (special *open*)) (declare (special *closed*)) (declare (special *goal*)) (declare (special *moves*)) (let (state tuple children path) (cond ((null *open*) 'FAIL!) (t (setq tuple (car *open*) ) (setq state (car tuple) ) (setq *open* (cdr *open*) ) (setq *closed* (cons tuple *closed*)) (cond ((equal state *goal*) (setq path (get-path-from *goal*)) (setq path (reverse path)) (print-path path)
人工智能八数码游戏
实验一:八数码游戏问题 一、八数码游戏问题简介 九宫排字问题(又称八数码问题)是人工智能当中有名的难题之一。问题是在3×3方格盘上,放有八个数码,剩下第九个为空,每一空格其上下左右的数码可移至空格。 问题给定初始位置和目标位置,要求通过一系列的数码移动,将初始位置转化为目标位置。 (a)初始状态(b)目标状态 图八数码游戏 二、实验目的 1.熟悉人工智能系统中的问题求解过程; 2.熟悉状态空间的盲目搜索和启发式搜索算法的应用; 3.熟悉对八数码问题的建模、求解及编程语言的应用。 三、实验的思路 八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。 例如:
图1 八数码问题示意图 1.启发函数设定 由八数码问题的部分状态图可以看出,从初始节点开始,在通向目标节点的路径上,各节点的数码格局同目标节点相比较,其数码不同的位置个数在逐渐减少,最后为零,因此可以把数码不同的位置个数作为标志一个节点到目标节点距离远近的一个启发性信息,利用这个信息来扩展节点的选择,减少搜索范围,提高搜索速度。 2.搜索过程:(搜索采用广度搜索方式,利用待处理队列辅助,逐层搜索(跳过劣质节点)) a、把初始数码组压入队列; b、从队列中取出一个数码组节点; c、扩展子节点,即从上下左右四个方向移动空格,生成相应子节点: d、对子节点数码组作评估,是否为优越节点,即其评估值是否小于等于其父节点加一,是则将其压入队,否则抛弃。 e、判断压入队的子节点数码组(优越点)的评估值,为零则表示搜索完成,
来自MIT人工智能实验室
8447 麻省理工学院 人工智能实验室 AI Working Paper 316 1988年10月来自MIT人工智能实验室:如何做研究? 作者:人工智能实验室全体研究生 编辑:David Chapman 版本:1.3 时间:1988年9月 译者:柳泉波北京师范大学信息学院2000级博士生 摘要本文的主旨是解释如何做研究。我们提供的这些建议,对做研究本身(阅读、写作和程序设计),理解研究过程以及开始热爱研究(方法论、选题、选导师和情感因素),都是极具价值的。 备注:人工智能实验室的Working Papers用于内部交流,包含的信息由于过于初步或者过于详细而无法发表。不像正式论文那样,会列出所有的参考文献。 1. 简介 这是什么? 并没有什么神丹妙药可以保证在研究中取得成功,本文只是列举了一些可能会有所帮助的非正式意见。 目标读者是谁? 本文档主要是为MIT人工智能实验室新入学的研究生而写,但对于其他机构的人工智能研究者也很有价值。即使不是人工智能领域的研究者,也可以从中发现对自己有价值的部分。 如何使用? 要精读完本文,太长了一些,最好是采用浏览的方式。很多人觉得下面的方法很有效:先快速通读一遍,然后选取其中与自己当前研究项目有关的部分仔细研究。 本文档被粗略地分为两部分。第一部分涉及研究者所需具备的各种技能:阅读,写作和程序设计,等等。第二部分讨论研究过程本身:研究究竟是怎么回事,
如何做研究,如何选题和选导师,如何考虑研究中的情感因素。很多读者反映,从长远看,第二部分比第一部分更有价值,也更让人感兴趣。 .. 小节2 如何通过阅读打好AI研究的基础。列举了重要的AI期刊,并给出了一些阅读的诀窍。 .. 小节3 如何成为AI研究领域的一员:与相关人员保持联系,他们可以使你保持对研究前沿的跟踪,知道应该读什么材料。 .. 小节4 学习AI相关领域的知识。对几个领域都有基本的理解,对于一个或者两个领域要精通。 .. 小节5 如何做研究笔记。 .. 小节6 如何写期刊论文和毕业论文。如何为草稿写评审意见,如何利用别人的评审意见。如何发表论文。 .. 小节7 如何做研究报告。 .. 小节8 是有关程序设计的。AI程序设计与平常大家习惯的程序设计有所不同。 .. 小节9 有关研究生涯最重要的问题,如何选导师。不同的导师具有不同的风格,本节的意见有助于你找到合适的导师。导师是你必须了解如何利用的资源。 .. 小节10 关于毕业论文。毕业论文将占据研究生生涯的大部分时间,本部分涉及如何选题,以及如何避免浪费时间。 .. 小节11 有关研究方法论,尚未完成。 .. 小节12 或许是最重要的一节:涉及研究过程中的情感因素,包括如何面对失败,如何设定目标,如何避免不安全感,保持自信,享受快乐。 2. 阅读 很多研究人员花一半的时间阅读文献。从别人的工作中可以很快地学到很多东西。本节讨论的是AI中的阅读,在第四小节将论述其他主题相关的阅读。 阅读文献,始于今日。一旦你开始写作论文,就没有多少时间了,那时的阅读主要集中于论文主题相关的文献。在研究生的头两年,大部分的时间要用于做课程作业和打基础。此时,阅读课本和出版的期刊文章就可以了。(以后,你将主要阅读文章的草稿,参看小节三)。 在本领域打下坚实的基础所需要的阅读量,是令人望而却步的。但既然AI只是一个很小的研究领域,因此你仍然可以花几年的时间阅读本领域已出版的数量众多论文中最本质的那部分。一个有用的小技巧是首先找出那些最本质的论文。此时可以参考一些有用的书目:例如研究生课程表,其他学校(主要是斯坦福大学)研究生录取程序的建议阅读列表,这些可以让你有一些初步的印象。如果你对AI的某个子领域感兴趣,向该领域的高年级研究生请教本领域最重要的十篇论文是什么,如果可以,借过来复印。最近,出现了很多精心编辑的有关某个子领域的论文集,尤其是Morgan-Kauffman出版的。 AI实验室有三种内部出版物系列:Working Papers,Memos和Technical Reports,正式的程度依次增加,在八层的架子上可以找到。回顾最近几年的出版物,将那些非常感兴趣的复制下来。这不仅是由于其中很多都是意义重大的论文,对于了解实验室成员的工作进展也是很重要的。
机器人创客实验室建设方案教学内容
机器人创客实验室建 设方案
智慧教室建设_机器人创客实验室建设方案 教育创客教室/少儿编程+机器人+创客教育 一、功能概述 机器人编程教育的核心是培养创新意识。机器人编程教育,是培育学生提出问题、研究问题、解决问题、以及动手制作的综合能力,初步融合了科学研究、技术制作、艺术创作的全过程,能够培养学生的主动探索精神、批判性思维能力、自主创新能力、合作研究能力、语言表达能力、艺术创作能力及团队协作能力。 在国务院下发的《新一代人工智能发展规划》中明确指出:逐步开展全民智能教育项目,在中小学阶段设置人工智能相关课程、推广编程教育、建设人工智能学科,培养复合型人才,形成我国人工智能人才高地。在这样的政策背景下,机器人编程教育的普及、创客教师的培养等需求被摆到了十分重要且迫切的位置。越来越多的人开始认识创客、了解创客、参与创客。 机器人创客教室本着以课程为核心,以培养孩子能力为宗旨,以促进孩子的持续发展为终极目标,构建出了一整套的编程教材体系和机器人编程教育体系,并以任务驱动的教学模式,分阶段全方位地锻炼孩子们的动手能力、语言表达能力、逻辑思维能力、分析解决问题能力和协同合作能力,让孩子真正成为机器人编程教育的受益者。 二、规划要求 基于机器人编程教育的特点,在教室中创设安全、实用、富有科技和文化内涵的教学环境,激发学生对机器人、人工智能编程的好奇心和探究兴趣,满足学生观察体验、实验探究、合作学习等多样化学习需求。
(一).选址要求 需临近机器人以及教学器材储藏室。 (二)面积标准 机器人创客教室的使用面积应不小于80平方米。 (三)布局规划 1. 功能区域 机器人创客教育实验室项目为学校机器人普及教育的一个重要组成部分,实验室分为以下三大区域:机器人编程区,展示演示区,创意制作区。区域内包括机器人教具套装和3D打印套装,智能硬件等机器人生产制作相关设备。 2. 布局要求 室内设备布置应满足现行国家标准《中小学校设计规范》GB 50099 中 5.1 和 5.2 的相关规定: (1).黑板或书写白板宽度不宜小于 3.60m,高度不应小于1. 00m,边缘与讲台面的垂直距离宜为0. 80m~0. 90m;表面应采用耐磨且光泽度低的材料; (2).讲台长度应大于黑板长度,宽度不应小于0.80m,高度宜为0.20m;其两端边缘与黑板两端边缘的水平距离分别不应小于0.40m ; (3).课桌椅的排距不宜小于0.90m,最前排课桌的前沿与前方黑板的水平距离不宜小于2.20m,最后排课桌的后沿与前方黑板的水平距离不宜大于8.00m;教室最后排座椅之后应设横向疏散走道,自最后排课桌后沿至后墙面或固定家具的净距不应小于1.10m; (4).沿墙布置的课桌端部与墙面或壁柱、管道等墙面突出物的净距不宜小于 0.15m;前排边座座椅与黑板远端的水平视角不应小于30°; (5).教室内应为每个学生设置一个专用的小型储物柜。 (四)环境 1.安全、通行及疏通:学校安全、通行及疏通应满足现行国家标准《中小学校设计规范》GB50099-2011中8.1和8.8的有关规定。 2.空气质量:室内空气质量应满足现行国家标准《中小学校设计规范》 GB50099-2011中9.1和《室内空气质量标准》 GB/T 18883-2002中4.1与4.2的相关规定。 3.采光要求:室内采光应满足现行国家标准《中小学校设计规范》 GB50099-2011中9.2和《建筑采光设计标准》GB 50033-2013 的有关规定,课桌面采光系数不小于 2.0%,窗地面积比为1:5.0,窗户宜安装窗帘。 4.照明要求:室内照明应满足现行国家标准《中小学校设计规范》 GB50099-2011中9.3和《建筑照明设计标准》GB 50034-2013的有关规定,课桌面维持平均照度不小300lx,课桌面照度均匀度不小于 0.7,且不应产生眩光。书写板面维持平均照度不小于 500lx,书写板面照度均匀度不小于 0.8。照明功率密度不大于 9W/㎡,眩光值不大于19,显色指数不小于 80。 5.噪声控制:室内噪声控制值应满足现行国家标准《中小学校设计规范》 GB50099-2011中9.4和《民用建筑隔声设计规范》GB 50118 的有关规定。 6.通风与空气调节:应满足现行国家标准《中小学校设计规范》 GB50099-2011中10.1的有关规定。室内应有良好的自然通风。安装吊扇时,风扇叶片距地面高度不应低2.80m。吊扇的安装高度应确保风扇叶片在灯具出光口平面上方,安装位置应避免影响灯具的布置。 7.热环境:室内热环境应满足现行国家标准《室内热环境条件》 GB/T 5701-2008中5.1和5.2的相关规定。 (五)基础设施 1.墙地面:地面应采用防滑、防尘、耐磨、易清洁的材料,做好防潮处理;墙面应采用环保、防潮的材料,并预留空调管洞。 2.强电:室内电源插座与照明用电应分设不同支路。电源插座应采用安全型,电源插座数量和位置满足教学设备配置需求。 3.弱电:室内应覆盖无线网络,预留网络、广播、有线电视端口,端口数量和位置按设计要求配置。