腰椎力学分析的数值模拟与实验研究

腰椎力学分析的数值模拟与实验研究
王丰1,鲁成林1,胡瑜辉1,?张东升1,2
(1上海市应用数学与力学研究所,2上海大学力学系)
摘要:目的 研究腰椎骨体系的力学数值模拟与实验测试技术。 方法 采用了先进的三维图像处理技术重建腰椎骨的三维模型,再利用ANSYS求解结构在承力时的应力状态;在实验中采用了一种薄膜压力测试传感器结合图像处理的方法,提高测试椎间盘压力分布的精度;同时采用数字图像相关技术对腰椎骨上下关节突在承载情况下的空间位移进行了测量。结果
在数值计算中,给出了终板在几种承力状态下的应力云图,在实验结果中,对所采用的薄膜压力传感器进行了标定,获得了腰椎间盘(L3-L4)在承受轴压、前屈后伸和侧弯情况下的压力分布,以及对应的关节突的位移迹线。结论 本研究采用的数值分析技术和实验开发的测试技术可操作性强,精度满足要求,有望在类似的生物力学分析中得到应用。
关键词:腰椎骨;三维有限元分析;实验研究
Numerical and Experimental study on Lumbar Mechanics
Feng Wang1, Chenglin Lu1, Yuhui Hu1, Dongsheng Zhang1,2
(1 Shanghai Institute of Applied Mathematics and Mechanics, 2 Department of Mechanics)
ABSTRACT: Objectives To investigate the numerical modeling and experimental techniques in characterizing the stress distribution and physiological movement of vertebrae segment. Methods An advanced software Simpleware has been adopted to reconstruct the 3D model of vertebrae segment L4-S1. The stress distribution at the intervertebral disc was resulted when the lumber was under flexion/extension, lateral bend, and axial twist rotations with the use of ANSYS. In the experiment, a thin pressure film was used to measure the bearing stress at the intervertebral disc. Digital image processing techniques was applied to improve the sensitivity of the measurement. Moreover, the digital image correlation technique was also applied to identify the movement of the facet joints. Results The compressive stress distribution at the intervertebral disc were presented both numerically and experimentally under various load conditions. The spatial movement of pairs of facet joints between L3 and L4 were also illustrated. Conclusion The numerical and experimental methods proposed in this paper are rational and easy to apply to biomedical studies of lumbar mechanics.
Keywords: Lumbar; numerical modeling; experimental techniques
腰椎骨是人体重要的承力器官,由于其生理解剖结构复杂,腰椎病在临床上有多种表现,它主要与腰椎的先天性生理结构和腰椎在脊柱中承受的负载有关,力学负荷在促进腰痛, 椎间盘突出症发生主因的椎间盘退变过程中扮演着重要的作用[1,2,3]。为此,临床上使用了多类融合和非融合固定方式以达到解剖复位和固定,增加脊柱的三维稳定性[4,5]。采用三维数
收稿日期:2008-1-4
基金项目:国家自然科学基金(30672348 ,10772111), 上海市浦江计划(2006)
作者简介:王丰:(1982-) 男,硕士研究生,研究方向:生物力学
?通讯作者: 张东升(1967-) 男,教授,博导,Tel:(021)66135258; Email: donzhang@https://www.360docs.net/doc/ca10651788.html,
值分析和生物力学测试技术,对实际脊柱在承力状态下的受力情况和变形进行计算和实际测
试,是获得各种固定方法第一手资料的有效途径。
本文根据目前进行的关于腰椎骨力学分析的几个实例,详细阐述了数值计算技术和实验
技术在腰椎骨应力分析中的应用。首先利用simpleware三维建模软件对医学CT断层扫描
图像进行重构,获得真实的腰椎骨三维图象,再应用ANSYS进行应力分析,并给出了上下
终板的应力云图;在实验分析中,采用了prescale薄膜传感器,结合数字图像处理的方法,
对腰椎间盘在各种承载情况的压力分布进行了精确测量,同时,利用数字图像相关技术,对
腰椎关节突关节在承载情况下的相对运动进行了测量。
1 腰椎骨数值分析技术
以一名17岁男性,先天性峡部裂患者为研究对象,由于患者是L5先天性峡部裂,拟
采用L4-L5-S为研究对象,采用东芝AQUILION16 CT扫描(0.44219×0.44219×
0.624998mm)腰椎,以Dicom格式文件保存,输入Simpleware软件进行图像处理。Simpleware
是一种先进的三维建模软件,它包括图像处理模块ScanIP, 网格生成模块ScanFE和可准确
植入CAD的ScanCAD模块,为从断层扫描图像(如MRI、CT、Micro-CT等)转换至有限元
分析所需要的三维模型提供了解决方案。
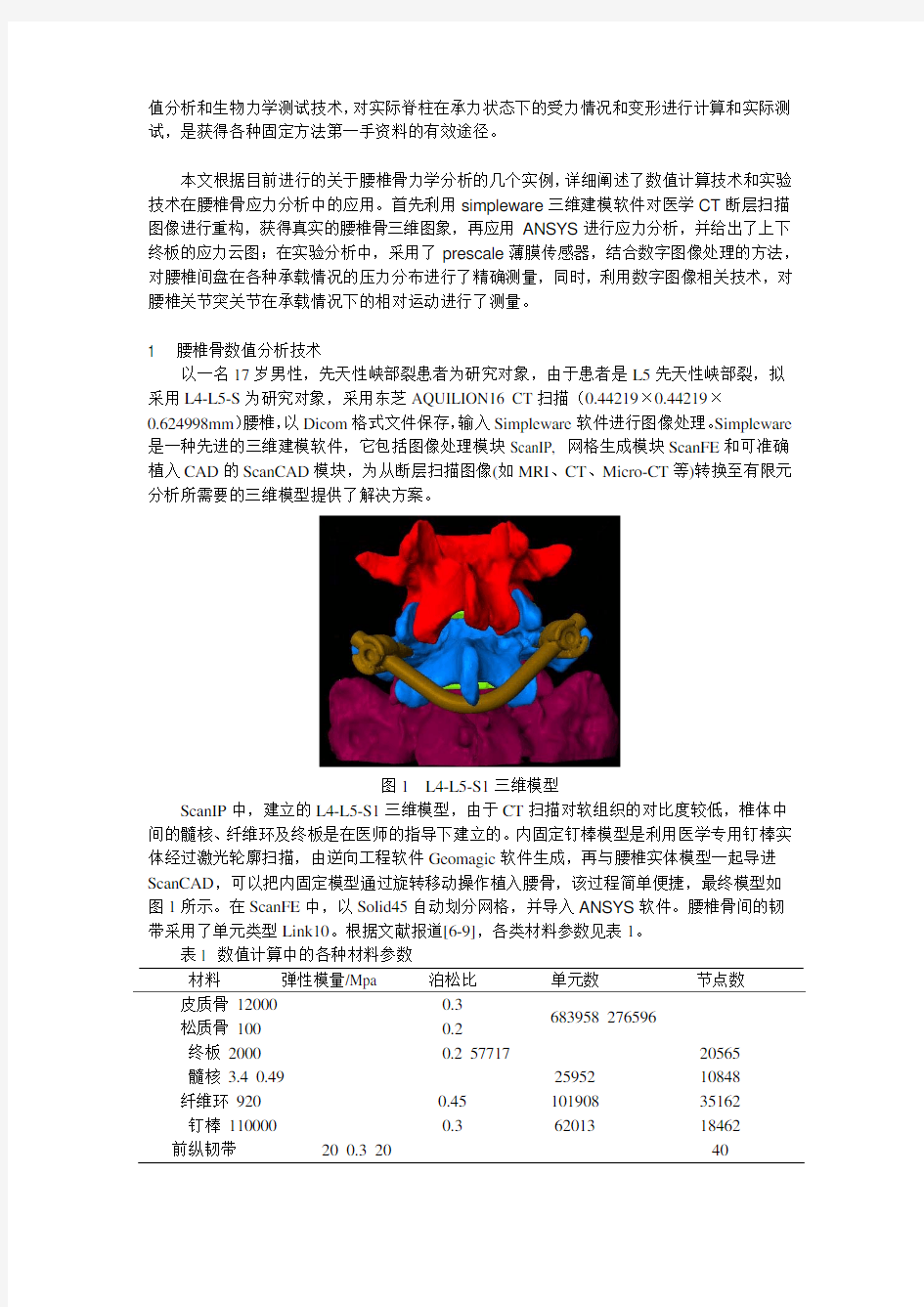
图1 L4-L5-S1三维模型
ScanIP中,建立的L4-L5-S1三维模型,由于CT扫描对软组织的对比度较低,椎体中
间的髓核、纤维环及终板是在医师的指导下建立的。内固定钉棒模型是利用医学专用钉棒实
体经过激光轮廓扫描,由逆向工程软件Geomagic软件生成,再与腰椎实体模型一起导进ScanCAD,可以把内固定模型通过旋转移动操作植入腰骨,该过程简单便捷,最终模型如
图1所示。在ScanFE中,以Solid45自动划分网格,并导入ANSYS软件。腰椎骨间的韧
带采用了单元类型Link10。根据文献报道[6-9],各类材料参数见表1。
表1 数值计算中的各种材料参数
材料弹性模量/Mpa 泊松比单元数节点数
皮质骨 12000 0.3
683958 276596 松质骨 100 0.2
终板 2000 0.2 57717 20565 髓核 3.4 0.49 25952 10848 纤维环 920 0.45 101908 35162 钉棒 110000 0.3 62013 18462 前纵韧带20 0.3 20 40
后纵韧带 20 0.3 20 40 黄韧带 19.5 0.3 20
40 棘上韧带 11.6 0.3 2
4 棘间韧带 1
5 0.3 8
16 关节囊韧带 32.9 0.3 20 40
2 腰椎间盘压力分布测试技术
腰椎间盘实际上像一个充满黏性液体的弹性容器。脊柱的承力状态使椎间盘内的液体发生流动,使间盘变形,腰椎间盘在平均分配椎体之间的压力方面起了很大作用。由于椎间盘是纤维环包裹着的封闭体,测量椎间盘的压力分布是一个棘手的问题。在本实验中,我们采用了富士公司生产的prescale 薄膜型压力传感器。该薄膜在受压时会变成红色,颜色的深浅与压力有关。为了定量测量椎间盘的压力分布,我们对薄膜型压力传感器进行了标定。
制作了标定的加载装置(如图1),把压力薄膜放在表面光滑、半径为15mm 的圆盘下,确保薄膜在加载时承受均匀的接触压力。标定实验共做六组,每一组由计算机控制实验机以14个压强等级加载,如图2。
图3 Zwick 加载系统对压敏片均匀加载
用扫描仪把薄膜传感器的颜色转化为数字图像,利用自编C ++程序分析其灰度的平均值。从而获得压强与灰度的关系,见图所示。通过多项式拟合,获得压强与实际灰度的函数关系式:
3724102152.8108618.1017089.016367.0g g g P ??×+×?+=
图4 压强与实际灰度的函数关系
人体脊椎受压的主要方式有正压、侧曲、前曲、后伸和扭转等,本次实验主要针对平时
人体承重最大,最容易发生病变的腰椎3、4、5节在受到上述载荷状态时椎间盘的压力分布进行测量。齐平的切开椎间盘,将事先裁剪好的薄膜压敏片放置其中,采用偏心加载的方式实现后伸、前曲、侧曲的载荷方式。加载后取出压敏片(图5)用扫描仪将灰度信息读入电脑,根据标定曲线,计算出椎间盘切面上的压力分布(图6)。
图5 不同载荷方式下压敏片上的灰度分布
可以从压强分布曲面上很直观的看到右曲时椎间盘右侧的压强有一个很明显的集中区域,最大值在1.45Mpa附近,大部分椎间盘切面上保持在0.8Mpa左右;而后伸时在椎间盘的后侧有明显的应力集中区域,最大值在1.2Mpa附近,大部分椎间盘面压强在0.7Mpa左右。
图6 椎间盘压力分布的三维显示
3小关节突的受力变形测量
由于腰椎间上下关节突的形状复杂,很难直接测量关节突的应力和变形,为此,我们采用了数字图像相关法[10]直接测量关节突对在承力时的空间运动变化,并假设关节突在矢状切面水平方向的位移较小,于是可以采用一个摄像机测量放置在脊柱正后方测量腰椎在承受轴向压缩和侧弯等载荷下关节突在冠状面内的位移,见图7所示。
图7 某种非融合固定右侧弯条件下的关节突测量现场图
为了获得较好的图像利用率,摄像机旋转了90度,这样在计算机屏幕上水平方向上的位移即是实际腰椎骨竖直方向上的的位移量。通过图像标定,获得图像与实际物体的放大倍数为,利用图像相关分析法,可获得L3-L4腰椎小关节突对在侧弯时的绝对位移,见图8所示。
图8 侧弯时L3-L4腰椎小关节突对的竖直位移
4 讨论
传统的生物力学实验都是在尸骨上进行的,并且每种内固定方式就要使用一具尸骨,给实验带来不便。众多学者从有限元数值模上进行研究,但是由于人体结构复杂,建模过程中丢失掉不少骨结构信息。
本研究从Dicom数字图像医学标准出发,用薄层CT扫描技术获得更为准确的CT断层影像,直接利用Simpleware三维建模软件读取图像数据,减少了人为因素的影响,大大地减少工作量和避免了原始数据的丢失,提高了建模速度,真实地构建出L4-L5-S及其终板,髓核与纤维环的三维有限元模型。但是,应该注意到,由于其它软组织在CT扫描中不显影,因此需要一些手工的操作来构建软组织结构,例如,在ANSYS中添加了各种韧带等。
由于生物材料多属于各向异性的黏弹性材料,真是模拟生物体结构的力学特性需要大量的计算,再以台式机为计算平台的系统基本上是不可能完成的任务。我们在实际分析中,把腰骨模型所有材料均假设为各向同性、均匀连续的线弹性材料。从计算结果上分析,模型在承受轴向压缩、前屈和侧弯三种工况下终板的应力云图分布合理,基本与临床表现一致。
椎间盘压力分布和大小是衡量各种融合和非融合固定方式优劣的重要指标,在文献中有采用针式压力传感器或在椎间盘内部放置环形压力传感器的报道[11,12],其缺点在于难以获得整个界面的压力分布。本文选用的prescale压敏薄膜可以直观地测量脊椎在各种承力状况下椎间盘的压力值与分布,利用数字图像处理技术,可以提高测量的自动化程度和精确度。虽然这种薄膜压敏片有以上优点,在实际测量中也存在不足之处,这就是在暗房压敏片的时候,需要将纤维环完全切开,容易导致腰椎承力时产生不稳定滑移。
OPTOTRAK三维运动捕捉与分析系统是理想的脊柱运动分析和小关节突运动测量的工具[12-15],然而,其昂贵的价格使它的应用受到限制。本文利用数字图像相关技术,采用单摄像机系统可以在一定程度上近似测量生物体的二维空间运动,结果表明,当摄像机布置在脊柱的正后方时,它可以有效地测量关节突在侧弯和扭转时的空间位移;当摄像机布置在脊柱的侧面时,它可以有效地测量关节突在前屈和后伸时的空间位移。
5 结论
本文介绍了采用数值模拟和实验测试的方法研究腰椎骨在各种成立工况下的分析方法。首先介绍了采用simpleware软件把层状CT扫描图像转化为三维数字模型,逼真地重建了复杂三维生物体结构,结合有限元分析,获得了腰椎骨生物力学性能。其次,我们开发了利用prescale压敏薄膜传感器测量腰椎间盘压力分布的图像处理软件,通过实现对压敏元件的精确标定,实现了腰椎间盘压力分布和大小的测量;同时,采用了自制的二维图像分析系统,对腰椎骨关节突的空间运动进行了测量。
参考文献
[1]Frymoyer JW, Pope MH, Clements JH, et al. Risk factors in low-back pain. An epidemiological survey[ J ]. J Bone Joint Surg (Am) , 1983, 65 (2) : 213-218.
[2]Kelsey JL, Githens PB,White AA 3 rd, et al. An epidemiologic study of lifting and twisting on the job and risk for acute prolapsed lumbar intervertebral disc[ J ]. J Orthop Res, 1984, 2 (1) : 61-66.
[3]Videman T, Nurminen M, Troup JDG, et al. Lumbar spinal pathology in cadaveric material inrelation to history of back pain, occupation and physical loading[ J ]. Spine, 1990, 15: 728-740.
[4] 张烽, 陈兵乾, 居建文等,三种单纯腰椎椎间融合术加用双侧椎弓根螺钉内固定后生物力学比较的实验研究, 医用生物力学,v22,n3,2007,p302-305
[5] 郑应,谭明生,腰椎后路非融合固定系统的临床应用, 中国骨伤,v20,n4,2007,p283-285
[6] 曾小丽彭亮白净,基于CT数据的人体L3一L4腰椎节段的三维有限元建模和分析,北京生物医学工程[J],V01.No.32,2007
[7] 王哲,汪正宇,王冬梅等,基于CT图像的侧凸脊柱胸腰段及骶骨整体三维有限元模型的建立,机械[J],V4,No.23,2007,p24-26
[8] Renner SM, Natarajan RN, Patwardhan AG,et al, Novel model to analyze the effect of a large compressive follower preload on range of motions in a lumbar spine, Journal of Biomechanics, v 40,n 6,2007,p 1326-1332
[9] Schmidt H, Kettler A, Rohlmann A, et al, The risk of disc prolapses with complex loading in different degrees of disc degeneration - A finite element analysis, Clinical Biomechanics, v 22,n 9,9.2007,p 988-998
[10] Zhang D, Zhang X, Data Analysis for Film, Optical Engineering, V ol. 37, No. 11, 1998, 2914-2917.
[11] Swanson KE, Lindsey DP, Hsu KY, et al, The Effects of an Interspinous Implant on
Intervertebral Disc Pressures, SPINE V olume 28, Number 1, pp 26–32, 2003
[12] Wilke Hans-Joachim, Schmidt Hendrik, Werner Karin, et al., Biomechanical Evaluation of a New Total Posterior-Element Replacement System, SPINE, V olume 31, Number 24, pp 2790–2796, 2006
[13] Masharawi Y M, Alperovitch-Najenson D, PhD, Steinberg N, et al, Lumbar Facet Orientation in Spondylolysis: A Skeletal Study, SPINE V olume 32, Number 6, pp E176–E180, 2007
[14] Zhu Q, Larson CR, Sjovold SG, et al, Biomechanical Evaluation of the Total Facet Arthroplasty System? 3-Dimensional Kinematics, SPINE V olume 32, Number 1, pp 55–62, 2007 [15] Lindsey DP, Swanson KE, Fuchs P, et al, The Effects of an Interspinous Implant on the Kinematics of the Instrumented and Adjacent Levels in the Lumbar Spine, SPINE V olume 28, Number 19, pp 2192–2197, 2003
运动生物力学
运动生物力学 运动生物力学:是生物力学的一个重要分支,是研究体育运动中人体机械规律的科学。 运动生物力学的主要任务:提高运动能力,预防运动损伤 运动生物力学的研究方法分为测量方法和分析方法,其中测量方法可以分为运动学测量、动力学测量、人体测量、肌电图测量 运动学测量的参数:(角)位移、(角)速度、(角)加速度 动力学测量的参数:主要界定在力的测量方面。 人体测量是用来测量人体环节的长度、围度及,(质量、转动惯量等) 肌电图测量是用来测量肌肉收缩时的神经支配特性。 动作结构:运动时所组成的各动作间相互联系、相互作用的方法或顺序 动作结构的特征主要表现在运动学和动力学,运动学特征指完成动作时的时间、空间和时空方面表现出来的形式或外貌上的特征;动力学的特征指决定动作形式的各种力(力矩)相互作用的形式和特点,包括力、惯性和能量特征。 运动学特征:时间特征、空间特征和时空特征 时间特征反映的是人体运动动作和时间的关系:半蹲起立和深蹲起立 空间特征是指人体完成运动动作时人体各环节随时间变化所产生的空间位置 改变状况:下肢和躯干等空间移动轨迹 时空特征指人体完成运动动作时人体位置变化的快慢情况。 动力学特征包括,力的特征、能量特征和惯性特征 能量特征:人体运动时完成的功、能和功率方面的表现形式。 惯性特征:人体运动中人的整体、环节以及运动器械的质量、转动惯量对运动 动作所具有的影响。 动作系统:大量单一动作按一定规律组成为成套的动作技术,这些成套的动作技术叫做动作系统。 人体基本运动动作形式可主要归纳为推与拉动作、鞭打动作、缓冲和蹬伸动作及扭转、摆动和相向运动等动作形式 上肢基本运动动作形式——推(铅球)、拉(单双杠)、鞭打(标枪)★人体基本运动下肢基本运动动作形式——缓冲、蹬伸、鞭打 动作形式全身基本运动动作形式——摆动、躯干扭转、相向运动 人体的运动是由运动器系的机能特征所决定的,即以关节为支点,以骨为杠杆,在肌肉力的牵拉下绕支点转动,各肢体环节运动的不同组合使人完成千变万化的动作。 生物运动链根据其结构特点可以分为开放链和闭合链。见书P28-图2-15 生物运动链中的杠杆同机械杠杆一样也分为平衡杠杆、省力杠杆和速度杠杆 人体中的三类骨杠杆:见书P30-图2-16 ★人体惯性参数是指人体整体及环节质量、质心位置、转动惯量和转动半径 人体简化模型:质点模型、刚体和多刚体模型
运动生物力学的概念
一.运动生物力学的概念:运动生物力学的概念是研究体育运动中人体及器械机械运动规律的科学。 二.动能与势能的正确利用(高水平运动员动作的特征):1.高水平运动员在完成投掷动作时有效地利用了助跑速度。2.高水平运动员超越器械动作时间短,身体背弓大器械被充分引向身体后方。3.高水平运动员较好的利用了身体的动能及肌肉的弹性势能。 三.人体运动的形式:如果将人体简化为质点,人体运动可分为:直线运动和曲线运动。如果将人体简化为刚体,人体运动可分为:平动,转动和复合运动。2.斜抛物体的运动:1.定义:运动轨迹为抛物线 2.斜抛运动的构成:水平方向:匀速直线运动竖直方向:竖直上抛运动 四.牛顿第一定律(惯性定律):1.定义:任何物体,在不受力作用时,都保持静止或匀速直线运动状态。2.应用(保持跑速,动作连贯)牛顿第二定律及其应用1.定义F=ma 2:几点注意1.a是运动学量F是动力学量,他们都是矢量力是产生运动的原因,并且加速度方向与力的方向一致。 2.牛顿第二定律中的物体是被当做质点的 3.加速度与力同时出现同时消失,反应的是瞬时关系。应用:加速跑,超重,失重,弯道跑 五.牛顿第三定律及其应用:1.定义Fab=-Fba 2.应用:加速跑,起跳,投掷链球 六.动量与冲量 1.动量:K=mv 2.冲量:I=Ft 动量定理在体育中的应用1:落地缓冲动作:要减少对人体的冲力,就得延长力的作用时间。 七.人体平衡的力学条件人体平衡的力学条件是人体所受的合外力为零和合外力矩为零。表达式为:∑F=0,∑M=0 如:燕式平衡,单杠支臂悬垂 八.人体重心的概念:1.概念:人体全部环节所重力的合力的作用点,就叫人体重心 2.研究人体重心的意义:评定一个体育动作的质量,分析其技术特征和纠正错误动作等。都需要从人体重心的变化规律去分析,无论是动力性的动作还是静力性的姿势,探索其运动规律时,都离不开人体重心。 3.特点:人体中心不想物体那样恒定在一个点上,不仅在一段时间内,要受肌肉和脂肪的增长或消退等因素的影响,即使在每一瞬间,也要受呼吸,消化,血液循环等因素的影响,特别是在体育运动中,要受人体姿势变化的制约,随姿势的改变,有时甚至移出体外。例如:体操中的“桥”,背越式跳高的过杆动作等。 九.人体平衡的分类:1:根据支点相对中心位置分类:1:上支撑平衡:当人体处于平衡,切支撑点在人体重心上方,如:体操中的各类悬垂动作。2:下支撑平衡:当人体处于平衡,切支撑点在人体重心的下方,下支撑平衡在体育动作中最为常见如:站立,自由体操和平衡木的平衡动作以及田径,武术等。3:混合支撑平衡:是一种多支撑点的平衡状态,这时有的支撑点在人体重心上方,有的支撑点在人体重心下方。如:肋木侧身平衡根据平衡的稳定度分类:稳定平衡,不稳定平衡,随遇平衡,有限度的稳定平衡。 1:稳定平衡:人体在外力作用下,偏离平衡位置后,当外力撤除时,人体自然恢复平衡位置,而不需要通过肌肉收缩恢复平衡。如果物体偏离平衡位置的结果是物体重心升高,则该平衡是稳定平衡,多数上支撑平衡属于稳定平衡。如:单杠支臂悬垂 2:人体在外力的作用下,偏离平衡位置后,当外力撤除时,人体不仅不能回到原来的平衡位置,而是更加偏离平衡位置。如果物体偏离平衡位置的结果是物体的重心降低,则该平衡是稳定平衡,多数下支撑平衡属不稳定平衡。如:单臂手倒立 3:随遇平衡:人体在外力的作用下,偏离平衡位置后,当外力撤除时,人体既回不到原来的平衡位置,也不继续偏离原位置,而是在新位置上保持平衡。在体育中很少见。如:连续完成两个前滚翻。 4:有限度的稳定平衡:人体在外力作用下,一定限度内偏离平衡位置,当外力撤除时,人体回到平衡状态,但如果偏离平衡位置超过某一限度时,人体失去平衡。如:太极拳中的推手。
运动生物力学
一、名词解释 1、力学:是研究物体机械运动规律的学科。 2、生物力学:是生物物理学的一个分支,是力学与生物学的交叉、渗透、融合而形成的一门学科。 3、运动生物力学:是研究人体运动力学规律的学科,它是体育科学学科体系的重要组成部分。 4、转动惯量:是衡量物体(人体)转动惯性大小的物理量。用ω表示。 5、角速度:是指人体在单位时间内转过的角度。用α表示。 6、加速度:指单位时间内人体运动速度的变化量,是描述人体运动速度变化快慢的物理量。 7、角加速度:表示人体转动时角速度变化的快慢,指转动中角速度的时间变化率。 8、三维坐标系:又称空间坐标,判断人体运动要从三个方向上看,由原点引出三条互相垂直的坐标轴,分别用Ox、Oy、Oz表示。 9、力:是物体间的相互作用。 10、力矩:使物体(人体)转动状态发生改变的原因,用M表示。 11、动量:用以描述物体在一定运动状态下具有的“运动量”。 12、动量矩:是转动惯量J和角速度ω的乘积。用L表示。 13、冲量:物体(人体)运动状态的改变时力作用的结果,力在时间上的积累可用冲量I表示 14、冲量矩:在研究转动问题时,把力矩在时间上的积累称为冲量矩,是力矩和时间的乘积。 15、均匀强度分布:在特定的加载条件下,材料的每一部分受到的最大应力相同。 16、适宜应力原则:骨骼对体育运动的生物力学适应性本质上是骨骼系统对机械力信号的应变。有利于运动负荷及强度导致的骨应变会诱导骨量增加和骨的结构改善;应变过大则造成骨组织微损伤和出现疲劳性骨折,应变过小或出现废用则导致骨质流失过快。 17、骨折:骨的完整性或连续性中断者称为骨折。是运动损伤中最常见的损伤之一 18、关节软骨:是一种多孔的粘弹性材料,其组织间隙中充满着关节液。 19、渗透性:在恒定的外力下,软骨变形,关节液和水分子溶液从软骨的小孔流出,由形变引起的压力梯度就是引起关节液渗出的驱动力。 20、界面润滑:是依靠吸附于关节面表面的关节液分子形成的界面层作为润滑。 21、压渗润滑:液体又接触面从运动方向的前缘挤出,在接触面的后缘由渗透压把压渗出的滑液再吸收回软骨内,这种机制能够有效地保存关节液及其位置,对抗外力。 22、收缩元:代表可以相对滑动的肌浆球蛋白和肌动蛋白纤维丝,其张力与它们之间的横桥数目有关。 23、串联弹性元:表示肌浆球蛋白纤维、肌动蛋白纤维、横桥、Z线以及结缔组织的固有弹性。 24、并联弹性元:表示静息状态下肌肉的力学性质。 25、肌力变化梯度:在很多体育运动中往往要求运动员在极短时间内发挥出最大力,一般称爆发力。 26、力的时间梯度:达到1/2最大力所需要的时间称为力的时间梯度。 27、力的速度梯度:力的最大值与所需时间的比值这个指标称为力的速度梯度。 28、摆动动作:指人体肢体为增加全身活动的协调性及增加动作效果而绕某一轴进行的一定幅度的转动。 29、鞭打动作:人们把这种在克服阻力或自体位移过程中,肢体依次加速与制动,使末端环节产生极大速度的动作形式称为鞭打动作。 30、相向动作:人体在腾空状态下,由于肌群的收缩使身体两部分同时向相反方向转动称为相向动作。 31、冲击动作:在体育动作中,通过扣、踢等击打方式使人体四肢动量向运动器械实现转移的动作形式。 32、缓冲动作:肢体末端环节与外界发生相互作用,肢体由伸展到屈曲以延长力的作用时减小冲击力作用或控制外界物体的动作,在运动技术中叫缓冲动作。 33、蹬伸动作:人体在有支撑的状态下,下肢各环节积极伸展,配合以正确的摆臂技术,给支撑面施加压力,已获得较大支撑反作用力的动作过程。
脊柱生物力学
脊柱生物力学标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
脊柱生物力学 1.运动节段由于脊柱的结构和功能较为复杂,在研究脊柱的生物力学时,通常观察脊 柱的某一部分,该部分由相邻两椎体及其间的软组织构成,能显示整个脊柱相似的生物力学特性的最小功能单位,其运动的叠加可构成脊柱的三维运动,称为运动节段,又称脊柱功能单位。 分部:通常将其分为前后两部分:前部分由两个椎体、椎间盘和后纵韧带组成;后部分由相应的椎弓、椎间关节、横突、棘突和韧带组成。 前后部承载:前部的椎间盘和后部的小关节在负重及应力分布方面存在着一种独立的、动态的关系。在侧方、前方剪应力作用、轴向压缩及屈曲运动时,前部的椎间盘是主要的负重部位。如伴有较大的位移时,后部的小关节也承受部分载荷,在后方剪应力(背伸运动)和轴向旋转时,小关节则是主要的负重部位。 功能:①运动功能,提供椎体三维空间的运动范围;②承载功能,将载荷从颈部传到骨盆;③保护功能,保护椎管内容纳的脊髓及神经根。椎体,椎间盘及前纵韧带、后纵韧带提供脊柱的支持功能和吸收对脊柱的冲击能量。运动范围主要依靠椎间关节复合体完成。躯干及韧带保证脊柱的稳定性和维持身体姿势。 2.脊柱运动学神经和肌肉的协同作用产生脊柱的运动。脊柱作为柔软性载负体,其运动 形式是多样的。脊柱的运动范围较大,但组成脊柱的各个节段的运动范围却较小,节段间的运动是三维的,表现为两椎骨的角度改变和位移。脊柱的活动通常是多个运动节段的联合运动,包括沿横轴、矢状轴和纵轴的旋转和平移。限制任何部位的活动都可增加其他部位的活动。 (1)运动特性:在脊柱运动中,椎体与椎间盘韧带、关节囊等组织相比,变形量
材料力学性能静拉伸试验报告
静拉伸试验 一、实验目的 1、测45#钢的屈服强度s σ、抗拉强度m R 、断后伸长率δ和断面收缩率ψ。 2、测定铝合金的屈服强度s σ、抗拉强度m R 、断后伸长率δ和断面收缩率ψ。 3、观察并分析两种材料在拉伸过程中的各种现象。 二、使用设备 微机控制电子万能试验机、0.02mm 游标卡尺、试验分化器 三、试样 本试样采用经过机加工直径为10mm 左右的圆形截面比例试样,试样成分分别为铝合金和45#,各有数支。 四、实验原理 按照我国目前执行的国家 GB/T 228—2002标准—《金属材料 室温拉伸试验方法》的规定,在室温1035℃℃的范围内进行试验。将试样安装在试验机的夹头当中,然后开动试验机,使试样受到缓慢增加的拉力(一般应变速率应≤0.1m/s ),直到拉断为止,并且利用试验机的自动绘图装置绘出材料的拉伸图。 试验机自动绘图装置绘出的拉伸变形L ?主要是整个试样,而不仅仅是标距部分的伸长,还包括机器的弹性变形和试样在夹头中的滑动等因素,由于试样开始受力时,头部在头内的滑动较大,故绘出的拉伸图最初一段是曲线。 塑性材料与脆性材料的区别: (1)塑性材料: 脆性材料是指断后伸长率5%δ≥的材料,其从开始承受拉力直至试样被拉断,变形都比较大。塑性材料在发生断裂时,会发生明显的塑性变形,也会出现屈服和颈缩等现象; (2)脆性材料: 脆性材料是指断后伸长率5%δ<的材料,其从开始承受拉力直至试样被拉断,变形都很小。并且,大多数脆性材料在拉伸时的应力—应变曲线上都没有明显的直线段,几乎没有塑性变形,在断裂前不会出现明显的征兆,不会出现屈服和颈缩等现象,只有断裂时的应力值—强度极限。 脆性材料在承受拉力、变形记小时,就可以达到m F 而突然发生断裂,其抗拉强度也远远 小于45钢的抗拉强度。同样,由公式0m m R F S =即可得到其抗拉强度,而根据公式,10 l l l δ-=。 五、实验步骤 1、试样准备 用笔在试样间距0L (10cm )处标记一下。用游标尺测量出中间横截面的平均直径,并且测出试样在拉伸前的一个总长度L 。 2、试验机准备:
立定跳远的运动生物力学分析
立定跳远的运动生物力学分析立定跳远成绩通常被作为评定学生身体素质好坏的一个重要指标,同时它也 经常作为运动员选材的一个重要依据。运动生物力学是一门理论与实践密切结合 的应用科学,?它直接为增强人民体质和提高运动技术水平服务。以运动力学原理来分析立定跳远各个阶段的动作技术,找出提高立定跳远技术的途径,寻求最佳立定跳远技术,以帮助提高立定跳远的成绩。换句话说,就是从这个角度来分析立定跳远应该怎么跳,为什么要这么做,如何提高立定跳成绩。立定跳远属于抛射点与落地点在同一水平面上的抛射运动,?根据远度公式得知,影响抛射远度的主要因素是腾起初速度,又根据动量定理,?要求练习者在预蹲后应立即摆臂,蹬地跳起,蹬地应快猛干脆利落。因此,在进行完整连贯地练习立定跳远时应注意以下一些动作技术方面的问题。 动作各阶段分析 1、预蹲预摆阶段。双腿预蹲与双臂预摆是同时进行且运动方向完全相反。当双腿下蹲时,双臂由前下方经体侧向后上方摆动,上体稍前倾。这个阶段应注意四个问题。 (1)下蹲的程度,是微蹲、半蹲或是全蹲应明确。立定跳远时下蹲程度要求是微蹲,这时,人体的肌肉初长度被拉长达到了最适宜的程度。若是半蹲或全蹲就不符合人体肌肉的工作特点,变成了有意识地放慢下蹲的速度而延长力的作用时间,这样会降低肌肉的收缩力量,不利于形成强大的肌肉收缩力即爆发力。 (2)预蹲摆后能不能停顿。立定跳远动作要求是不能停顿的,当预蹲预摆后应接着迅速完成蹲地动作的,其主要原因是:停顿是把连贯的动作变成静力性动作,而静力性动作较连贯性动作易使肌体产生疲劳。。 (3)摆臂的程度。预蹲时双臂后摆应做到自然,不能强扭使摆幅加大,蹬地时双臂前摆应尽力前上方摆起,以最大程度地提高身体重心。 (4)明确预蹲摆的次数是不是越多越有利于起跳。立定跳远要求只预蹲摆一至二次,并不需要进行多次的重复。多次的重复预蹲预摆不利于充分利用肌肉的弹性,同时由于肌肉松驰现象的存在,不利于肌肉产生最大收缩强力。 2蹬地结束后人体腾空到最高点阶段。预蹲结束应立即摆臂与蹬地跳起,蹬直双腿,上体尽量前送,人体在达到最高点时成一斜线,这时候整个人体也应该是遵循角动量守恒定律的。 3人体从最高点到安全落地阶段。人体蹬离地面后,由于上体尽量前倾,在最高点时,是成一条斜线根据角动量守恒定律,当人体在腾空后,在不改变外力矩作用时,身体某一环节若以一定大小的动力矩绕转轴向某一方向产生转动,必然导致身体其他环节以等量大小的动力矩绕转轴向相反方向发生转动。这时,若不急剧挥臂,向前屈体并做收腹举腿,必然导致人体按原来斜线状态落地。为保证安全落地,必定要使下肢向反方向发生转动,并且小腿前伸着地,保证了上肢上体与下肢转动的动量矩矢量和为零,才能顺利地落地。 为了提高立定跳远的成绩,在进行动作练习时还应注意以下一些训练方法的问题: 1从抛射原理的射程公式中我们可得知:初速度与远度是成正比的,初速度是影响远度的主要因素。因此,在训练中必须着重提高初速度以提高远度。由于
材料力学性能拉伸试验报告
材料力学性能拉伸试验报告 材化08 李文迪 40860044
[试验目的] 1. 测定低碳钢在退火、正火和淬火三种不同热处理状态下的强度与塑性性能。 2. 测定低碳钢的应变硬化指数和应变硬化系数。 [试验材料] 通过室温拉伸试验完成上述性能测试工作,测试过程执行GB/T228-2002:金属材料室温拉伸试验方法: 1.1试验材料:退火低碳钢,正火低碳钢,淬火低碳钢的R4标准试样各一个。 1.2热处理状态及组织性能特点简述: 1.2.1退火低碳钢:将钢加热到Ac3或Ac1以上30-50℃,保温一段时间后,缓慢而均匀 的冷却称为退火。 特点:退火可以降低硬度,使材料便于切削加工,并使钢的晶粒细化,消除应力。1.2.2正火低碳钢:将钢加热到Ac3或Accm以上30-50℃,保温后在空气中冷却称为正 火。 特点:许多碳素钢和合金钢正火后,各项机械性能均较好,可以细化晶粒。 1.2.3淬火低碳钢:对于亚共析钢,即低碳钢和中碳钢加热到Ac3以上30-50℃,在此 温度下保持一段时间,使钢的组织全部变成奥氏体,然后快速冷却(水冷或油冷),使奥氏体来不及分解而形成马氏体组织,称为淬火。 特点:硬度大,适合对硬度有特殊要求的部件。 1.3试样规格尺寸:采用R4试样。 参数如下:
1.4公差要求 [试验原理] 1.原理简介:材料的机械性能指标是由拉伸破坏试验来确定的,由试验可知弹性阶段 卸荷后,试样变形立即消失,这种变形是弹性变形。当负荷增加到一定值时,测力度盘的指针停止转动或来回摆动,拉伸图上出现了锯齿平台,即荷载不增加的情况下,试样继续伸长,材料处在屈服阶段。此时可记录下屈服强度R 。当屈服到一定 eL 程度后,材料又重新具有了抵抗变形的能力,材料处在强化阶段。此阶段:强化后的材料就产生了残余应变,卸载后再重新加载,具有和原材料不同的性质,材料的强度提高了。但是断裂后的残余变形比原来降低了。这种常温下经塑性变形后,材料强度提高,塑性降低的现象称为冷作硬化。当荷载达到最大值Rm后,试样的某一部位截面开始急剧缩小致使载荷下降,至到断裂。 [试验设备与仪器] 1.1试验中需要测得: (1)连续测量加载过程中的载荷R和试样上某段的伸长量(Lu-Lo)数据。(有万能材料试验机给出应力-应变曲线) (2)两个个直接测量量:试样标距的长度 L o;直径 d。 1.2试样标距长度与直径精度:由于两者为直接测量量,工具为游标卡尺,最高精度为 0.02mm。 1.3检测工具:万能材料试验机 WDW-200D。载荷传感器,0.5级。引伸计,0.5级。 注1:应力值并非试验机直接给出,由载荷传感器直接测量施加的载荷值,进而转化成工程应力,0.5级,即精确至载荷传感器满量程的1/500。 注2:连续测试试样上某段的伸长量由引伸计完成,0.5级,即至引伸计满量程的1/50。
从运动生物力学原理谈运动损伤的发生原因及防治
·运动医学· 从运动生物力学原理谈运动损伤 的发生原因及防治 戈定(同济医科大学式汉‘30030) 摘要:运动损伤的发生原因多种多样,但从根本_卜讲.上要是由于运动训练及技术动作违背r 运 动解剖学、生理学及生物力学的科学原理所致。本文欲探讨此力一面生物力学的原因及防治方法。 关键词:运动生物力学,运动损伤,原因,防治 On the Causes of Exercises Injury and Prevention,Treatment from the Perspective of Sports E3iomechanics (*e Dcn} (Tuug.lt Me
肌肉骨骼系统基础生物力学.doc
肌肉骨骼系统基础生物力学(第3版翻译版)【(美)Margareta Nordin 等著邝适存郭霞译 本书分3篇18章,深入讨论了肌肉骨骼系统的组织结构、关节力学及 临床应用,包括对肌肉骨骼的发育、组成结构、功能及功能评定、创伤 的力学机制、临床力学结构重建等相关的最新研究信息。同时也涉及肌 肉骨骼系统的分子和细胞生物学的研究进展 郭霞 博土早年毕业于北京医科大学,曾做过骨科临床医生,后在德国从事骨科临床及基础研究工作多年。现任职于香港理工大学康复医疗科学系,从事骨科康复研究及教学工作。她文通中英语,学贯骨科临床与基础,具备了编写这部词书的优越条件。本书编校人员本着治学严谨的原则,用六年时间参阅了中英文有关名词的权威性著作8部,相关的临床及科研期刊7种,专业网址4个编辑成此书。初稿完成后又广泛征求意见,反复推敲内容,最后定稿。序言 生物力学是了解人类肌肉骨骼系统的根基,用以协助医科和康复专业人士进行有效的评估,设计实证治疗方案,为肌肉骨骼疾病患者提供有效的治疗服务。 本书的英文原著深受学生、老师、研究员和临床医师的欢迎,是学习生物力学的热门教科书。课本内容按组织类型、结构和关节三大篇章依序编辑,大大方便了读者掌握不同课题的概念和原理;课本也收进了几篇有关生物力学应用的文章,以解决常见的临床问题。这样的内容编排迎合了医科和康复科学生及临床医师们的学习需求。本书内容丰富,附有详细图解,适合专业学习及深造研究之用,并且透过实例解析,加深读者对生物力学的概念。 这本教科书的中文译本由香港理工大学康复治疗科学系的副教授邝适存博士和郭霞博士领导编译。邝博士专攻生物工程,郭博士则专长研究骨骼成长与修复。出版中文译本的原意与本系的学术理念非常相符,同样着重可转化和以实证为本的临床研究。作为亚洲区内康复治疗科学领域的学术先锋,中文译本的出版,让以中文为母语的学生和临床医师们,能够学习和应用生物力不于医科和康复治疗领域,获益良多。
脊柱生物力学基本知识
青少年脊柱侧凸 概述 脊柱侧弯的经典定义为“脊柱在额状面上发生的侧方弯曲”,实际上应为一种复杂的三维畸形。额状面上畸形大于10 度的传统标准仍然适用于现行的脊柱侧弯定义。然而由于近来对力偶合认识的加深,目前我们知道侧弯的脊柱不仅在矢状面和额状面上存在有差异,在横断面上亦存在有畸形。因此在脊柱侧弯的诊断和治疗过程中一定要对人体的三维平面进行评估。 脊柱侧弯的患病率 患病率是指在某一时点检查时可能发生某病的一定人群中患有某病的频率。由于侧弯严重程度的不同,脊柱侧弯的患病率而有所差别,角度大的侧弯发生率较低,世界范围内各种类型脊柱侧弯的患病率约为1%,且在各种群中相对恒定。勿将患病率与发病率相混淆。发病率是指在观察期内(通常为一年),可能发生某种疾病的一定人群中新发生该病的频率。绝大多数研究所涉及的是脊柱侧弯的患病率。
脊柱侧凸的病因学 脊柱侧弯的病因多种多样。Moe 在其经典的教科书中列举的病因多达50 余种。我们将其粗略地将脊柱侧弯分为以下四类: ?神经肌肉性侧弯 ?先天性侧弯 ?某些疾患(疾病,肿瘤和创伤)导致的侧弯 神经肌肉性侧弯 神经肌肉性侧弯通常在儿童期发病。 神经病性和肌病性。然而, 为脊柱侧弯。 多数神经肌肉性侧弯患者需接受脊柱融合手术。 上并能够拥有较好的生活质量。坐立有助于改善患儿的肺通气, 减少肺部并发症。 神经病性疾患使神经系统受累。神经病性侧弯包括脑瘫, 碍及脊髓灰质炎。 肌性侧弯的病因在于肌肉组织疾患。Duchenne 肌萎缩和关节弯曲是肌 性疾患的典型病例,并有可能导致脊柱侧弯。 先天性侧弯
先天性侧弯是由于发育过程中胚胎受到损伤而造成的椎体或椎节 这种先天性脊柱缺陷可分为以下三个基本类型: ? 形成不良 ? 分节不全 ? 混合型 形成不良可累及单一椎体或多个椎体,指脊柱在宫内发育过程中,一个椎 体的部分或全部不能完整发育成型。形成不良最常见的情况是半椎体。该种畸形在侧弯中较为常见,并可使侧弯畸形加重。若脊柱后部结构发生形成不良,可导致脊柱裂或脊髓脊膜突出。右方插图显示的形成不良为半椎体。 混合型是指形成不良和分节不全同时发生。这一类型较难判别和评估,需加以定期随访。混合型最重的情况通常为脊柱的一侧存在有多个未分节的骨桥,而另一侧则为半椎体。单纯的形成不良或分节不全较为少见,相反大多数患者表现为形成不良和分节不全两者并存。 某些疾患造成的侧弯 某些全身性疾患也可导致脊柱侧弯的发生,如:感染、肿瘤或创伤。诸如间质病变的 Marfan 综合征和遗传性结缔组织病变的 神经纤维瘤病往往同时伴随有脊柱侧弯的发生。但并非这类疾病都有脊柱侧弯的发生。 急性和慢性感染(例如:结核)有可能造成明显的脊柱侧弯。脊柱肿瘤及楔变的骨折,最终也会导致脊柱侧弯,但这些情况在儿童中罕见。多节段椎板切除术往往造成医源性侧弯,此在成年中亦较为常见。
运动鞋的生物力学分析
运动鞋的生物力学分析 班级:本硕121 姓名:孟宪章学号:5702112111 摘要:运动鞋科技的每一项进步都离不开生物力学研究。无论国际品牌Nike和Adidas, 还是以李宁为代表的国内一线品牌,其核心技术的创新都必须遵循人体运动的生物力学原理。足的结构与力学功能问题、“足—鞋—地”相互作用的力学问题、鞋体材料与结构的运动功效问题以及足的骨结构生物力学模型问题,一直以来都是运动鞋生物力学研究的主题。国内外的品牌运动鞋的核心技术也都大同小异,主要是:模拟裸足、足跟控制、缓震减震。能量回归。 1 足的生物力学研究 足作为下肢的末端环节,通过直接或间接与外界接触,并发生力的相互作用,从而改变人体的运动状态。因此,足的结构与运动功能的生物力学问题是运动鞋生物力学研究的基础。足的生物力学研究主要涉及足的结构与形态分析、足的运动学测量分析、足的动力学测量分析和足的生物力学建模分析。 1.1足的形态与结构分析 足的形态与结构测量,借助了现代影像技术及电子技术,如三维足部扫描系统、X光、CT和MRI动态扫描系统等都早已运用于不同功能运动鞋的设计与制作。基于CAD计算机辅助设计并结合数字化技术的脚型测量系统,则使脚型测量更加简单快捷,个性化运动鞋的设计已变得十分方便。 1.2足的运动学测量分析 Siegler等研究了人体踝关节和距下关节的三维运动学特征,提出的重要结论对认识踝关节、距下关节以及在旋转、内翻等足运动过程中的作用具有指导意义。Sammarco利用瞬时旋转中心的方法考察了踝关节在背屈和内翻动作中的运动学特征。EIlgsbe利用有限螺旋轴法研究了跟距关节的三维运动学特征。Root等不仅提出了足部形态结构影响足部运动功能的观点,而且,采用三维影像技术研究了足的运动学特征,为足的运动学测量分析提供了理论与方法基础。 1.3足的动力学测量分析 Vlorton是最早利用复印技术记录足部压力分布的学者,他所设计的运动图像技术,其原理是利用橡胶的弹性把压力转换为相应比例的变形。随后,出现了用铝箔取代墨水和纸张作为复印介质的改进技术。之后通过记录即时压力曲线,并获得足底压力分布的运动图像技术随后开始出现。Elfamu的自动压力计便是这一技术的应用成果,第二代自动压力计使用了显示器和图像处理技术,可以通过黑白或彩色图像进行局部压力分析。此后,研究人员又利用光弹性作为压力转换方式,研制出新的压力显示系统。Cavanagh和Miehiyoshi采用类似的技术,并通过计算机处理得到了足底准三维压力曲线,曲线上各点的纵向坐标值与足底该点处的压力成比例,可以更直观地反映足底压力及其分布状况。近年来,随着计算机和图像处理技术的不断发展,其应用领域不断扩大,足底动态压力分布的测量与分析技术已经广泛应用于足与鞋底的动力学测量。压力板技术多采用力-电转换技术,足底压力被转换为可以方便测量的电信号。从而得到相当精确的结果,但其电延迟性不利于动态研究。而具有较好的精确性、良好的动态响应和较高的灵敏度的压电晶体技术就成为很好的替代,而且,电工学的发展解决了长期困扰该技术的充电泄漏问题,使其成为足底压力测量的有力工具。1.4足的生物力学建模研究 足的生物力学建模研究,起初关注的重点是建立足结构的数学模型,通过对足部骨骼解
材 料 力 学 性 能 实 验 报 告.
材料 学性能实院系:材料学院姓名:王丽朦学号:200767027 验报力告 实验目的: 通过拉伸试验掌握测量屈服强度,断裂强度,试样伸长率,界面收缩率的方法;通过缺口拉伸试验来测试缺口对工件性能的相关影响; 通过冲击试验来测量材料的冲击韧性; 综合各项试验结果,来分析工件的各项性能; 通过本实验来验证材料力学性能课程中的相关结论,同时巩固知识点,进一步深刻理解相关知识; 实验原理: 1)屈服强度 金属材料拉伸试验时产生的屈服现象是其开始产生宏观的塑性变形的一种标志。弹性变形阶段向塑性变形阶段的过渡,表现在试验过程中的现象为,外力不增加即保持恒定试样仍能继续伸长,或外力增加到某一数值是突然下降,随后,在外力不增加或上下波动情况下,试样继续伸长变形,这便是屈服现象。呈现屈服现象的金属材料拉伸时,试样在外力不增加仍能继续伸长时的应力称为屈服点,记作σs; 屈服现象与三个因素有关:(1)材料变形前可动位错密度很小或虽有大量位错但被钉扎住,如钢中的位错为杂质原子或第二相质点所钉扎;(2)随塑性变形发生,位错快速增殖;(3)位错运动速率与外加应力有强烈的依存关系。影响屈服强度的因素有很多,大致可分为内因和外因。 内因包括:金属本性及晶格类型的影响;晶界大小和亚结构的影响;还有溶质元素和第二相的影响等等。通过对内因的分析可表征,金属微量塑性变形抗力的屈服强度是一个对成分、组织极为敏感的力学性能指标,受许多内在因素的影响,改变合金成分或热处理工艺都可使屈服强度产生明显变化。 外因包括:温度、应变速率和应力状态等等。总之,金属材料的屈服强度即受各种内在因素的影响,又因外在条件不同而变化,因而可以根据人们的要求予以改变,这在机件设计、选材、拟订加工工艺和使用时都必须考虑到。 2)缺口效应 由于缺口的存在,在静载荷作用下,缺口截面上的应力状态将发生变化,产生所谓的“缺口效应”,从而影响金属材料的力学性能。 缺口的第一个效应是引起应力集中,并改变了缺口前方的应力状态,使缺口试样或机件所受的应力由原来的单向应力状态改变为两向或三向应力状态,也就是出现了σx(平面应力状态)或σy与σz(平面应变状态),这要视板厚或直径而定。
运动生物力学
知识点: 1、惯性参照系就是指相对地球静止或匀速直线运动的物体被选为参照物。 2、非惯性参照系就是指相对地球做变速运动的物体被选为参照物。 3、研究人体运动中常用的两种简化模型就是质点与刚体。 4、把人体简化为刚体时,人体运动分为平动、转动、复合运动。平动可分为直线平动与曲线平动。 5、物体加速度的方向与外力矢量与的方向相同。百米短跑过程中,起跑时加速度最大,速度最小;途中跑时速度最大,加速度最小,近似为零。 6、动点相对于静参考系的运动称为_绝对运动__;动点相对于动参考系的运动称为___相对运动__;动参考系相对于静参考系的运动称为__牵连运动__。 7、海拔越高,重力加速度g的越小;纬度越大,重力加速度越大,越靠近赤道,重力加速度越小。 8、运动员受不等于零的恒力作用时,该运动员不可能处于匀速直线运动状态。 9、链球从开始旋转一直到出手的这个阶段___既有向心加速度,又有切向加速度__。 10、力的作用可以使物体产生加速度与产生形变,这就就是力的作用效应。前者称为____外效应___后者称为__内效应___。力的合成与分解遵循__平行四边形_____法则。 人体内力只能改变身体的形状,不能引起人体整体的运动,人体外力可以引起人体整体的运动。 11、弯道跑时人体向内倾斜的目的就是为了产生足够的向心力,而不就是为了克服离心力。 12、跳高运动员飞跃横杆过程中,人体只受重力,重心的加速度为始终向下。 13、刚体平衡的力学条件就是合外力为零与合外力矩为零。 14、从轴的正面瞧去,力使物体按_逆__时针方向转动时,力矩规定为_正__;力使物体按_顺__时针方向转动时,力矩规定为_负__。 15、当物体处于不稳定平衡时,如果受到外力偏离其平衡位置时,重心将会降低。 16、当物体处于稳定平衡时,如果受到外力偏离其平衡位置时,重心将会升高。 17、按照支撑点与重心的位置关系,人体平衡可以分为上支撑平衡、下支撑平衡与混合支撑平衡。各举例一项。 18、按照平衡的稳定程度,人体平衡可分为稳定平衡、不稳定平衡、有限度的稳定平衡、随遇平衡。各举例一项。 19、稳定系数就定义为倾倒力开始作用时稳定力矩与倾倒力矩的比值。稳定系数大于1,物体保持稳定;稳定系数小于1,物体失去稳定。 20、描述物体惯性的物理量有两个,一个就是质量 ,它就是度量物体平动的惯性;另一个就是转动惯量 ,它度量物体转动的惯性。 22、力矩就是度量力对物体作用时产生转动效果的物理量。 23、力的方向与位移方向相同时,力作正功;力的方向与位移方向相反时,力作负功。 机械能有两种,动能与势能。 动能分为平动动能与转动动能。 势能有两种形式,分别就是重力势能、弹性势能。 24、改变滑动摩擦力的大小可以通过改变滑动摩擦系数与正压力来实现。 25、改变最大静摩擦力的大小可以通过改变静摩擦系数与正压力来实现。 26、摩擦系数的大小与接触面的粗糙程度、材料的属性与接触面积的大小有关。 27、转动轴可分为实体轴与非实体轴。非实体轴可分为关节轴与基本轴。人体三根基本轴为矢状轴、额状轴与垂直轴。 28、人体绕单杠转动属于有支点有实体轴的转动,人体在投掷链球或花样滑冰时在冰面上的旋转属于有支点无实体轴的转动,人体跳水或体操中的空中转体动作属于无支点无实体轴的转动。 29、乒乓球比赛中运动员以相同的速度与角度击打出上旋球与不旋转的球,上旋球的落点将会更近,速度将会更快。 30、当人体在空中转动时,转动惯量的大小与质量的大小、质量的分布、轴的位置有关;与重心位置无
短跑运动控制的生物力学分析
文章编号:1000 677X(2010)09 0037 07体育科学 2010年(第30卷)第9期 CH INA S PORT SCIENCE Vol.30,No.9,37 43,2010.短跑运动控制的生物力学分析 Biomechanical Analysis on Movement Control during Sprint Running 魏书涛1,刘 宇1,傅维杰1,李 庆2,钟运健1 WEI Shu tao1,LIU Yu1,FU Wei jie1,LI Qing2,ZH ONG Yun jian1 摘 要:目的:通过建立短跑最高速阶段下肢的生物力学模型,探讨短跑运动下肢肌肉在多 关节运动中协调、控制功能的生物力学机制,为短跑技术分析、技术最佳化提供依据。方法: 使用三维红外高速摄像系统(300H z)、三维测力台(1200Hz)采集8名高水平短跑运动员 在塑胶跑道上全力跑动时的数据。使用环节互动动力学分析短跑最高速时一个步态周期的 运动学、动力学数据。研究结果:1)触地初期,地面反作用力通过膝关节和髋关节前方,在 膝、髋关节处产生伸膝、屈髋力矩的外力矩(EXF),此时肌肉力矩(M US)的主要作用是对抗 地面反作用力产生的外力矩(EXF)。此时,膝、髋关节处最大MU S分别为203.40 93.60 Nm和455.24 198.72Nm;蹬伸末期,在髋关节处出现较大的由大腿加速度和髋线加速度 产生的惯性力矩(INT),在离地后小腿后摆运动中起到积极作用;2)摆动初期,小腿的后摆 主要是惯性力矩引起的;摆动末期肌肉力矩(M US)与惯性力据(IN T)出现最大值,膝关节处 为249.32 38.81Nm、194.01 30.90Nm,髋关节处为650.81 101.06Nm、410.80 78.67N m。结论:支撑期,肌肉力矩(M U S)和地面反作用力产生的外力矩(EXF)是主要控 制下肢运动的主要力矩。支撑末期,大腿加速度及髋线加速度在髋关节处产生较大的惯性 力矩(INT),为离地后小腿的积极后摆提供帮助;腾空期,摆动腿的运动主要受肌肉力矩 (MU S)和惯性力矩(INT)控制,其中,惯性力矩(IN T)主要由小腿的角加速度产生的,两力 矩相互作用,以控制与完成下肢的目标动作。 关键词:环节互动动力学;运动控制;关节力矩;短跑 Abstract:T he pur po se of this study was to analyze the movement contr ol of the low er extr emi ty by using bio mechanical model dur ing spr int r unning and prov ide the basis for technical anal ysis and o pt imization of spr int running.M etho ds:T hr ee dimensional v ideo g raphic and g ro und reactio n fo rce(GRF)data wer e co llect ed fr om8outstanding male sprint runners perfo rming spr int running at their max imum effor t.T he inter seg mental dy namics w as quant ified and the kinemat ics,the g ro und r eact ion f orce were analyzed dur ing a r unning gait cycle of the max imal speed phase in sprinting.R esult s:Dur ing the initial stag e o f stance phase,t he g round r eaction for ce passes t hr ough in fr ont of knee and hip joint,pro duces a knee ex tension tor que and hip flex io n to rque.T o co unteract the to rque of GRF,the hamstring muscle co nt racted and pr oduced a f lex ion tor que at knee(203.40 93.60N m)and an extension t orque at hip(455.24 198.72N m).At the hip joint,T he IN T due to thig h ang ular accelerat ion and hip velocity has contributio ns to back swing of leg dur ing later stance phase.Dur ing initial sw ing phase,T he IN T due to leg and thig h angular acceler at ion and hip acceleration has contributio ns to back swing o f leg.T he M U S and the IN T are the dominating tor ques and their maximal v alues wer e 249.32 38.81N m,194.01 30.90Nm at knee joint and650.81 101.06N m,410.80 78.67N m at hip joint respectiv ely dur ing later sw ing.Conclusio ns:D ur ing st ance phase,the muscle to rques and the gr ound reactio n t orques ar e the ma in t orques that tends to counter act each o ther for contro lling t he mo vement.T he IN T due to thig h ang ular acceleration and hip ve locity has contr ibutio ns t o back sw ing of leg during later stance phase.D ur ing sw ing phase, segment mo vement is co nt rolled mainly by active muscle t orques and motion dependent to rques (due to leg angular acceleratio n),and their functions w ere o pposite and canceled out. Key words:seg ment inter action;movement contr ol;j oint tor que;s p r int r unning 中图分类号:G804.6 文献标识码:A