逐点比较法直线插补圆弧插补实例Word版

逐点比较法直线插补
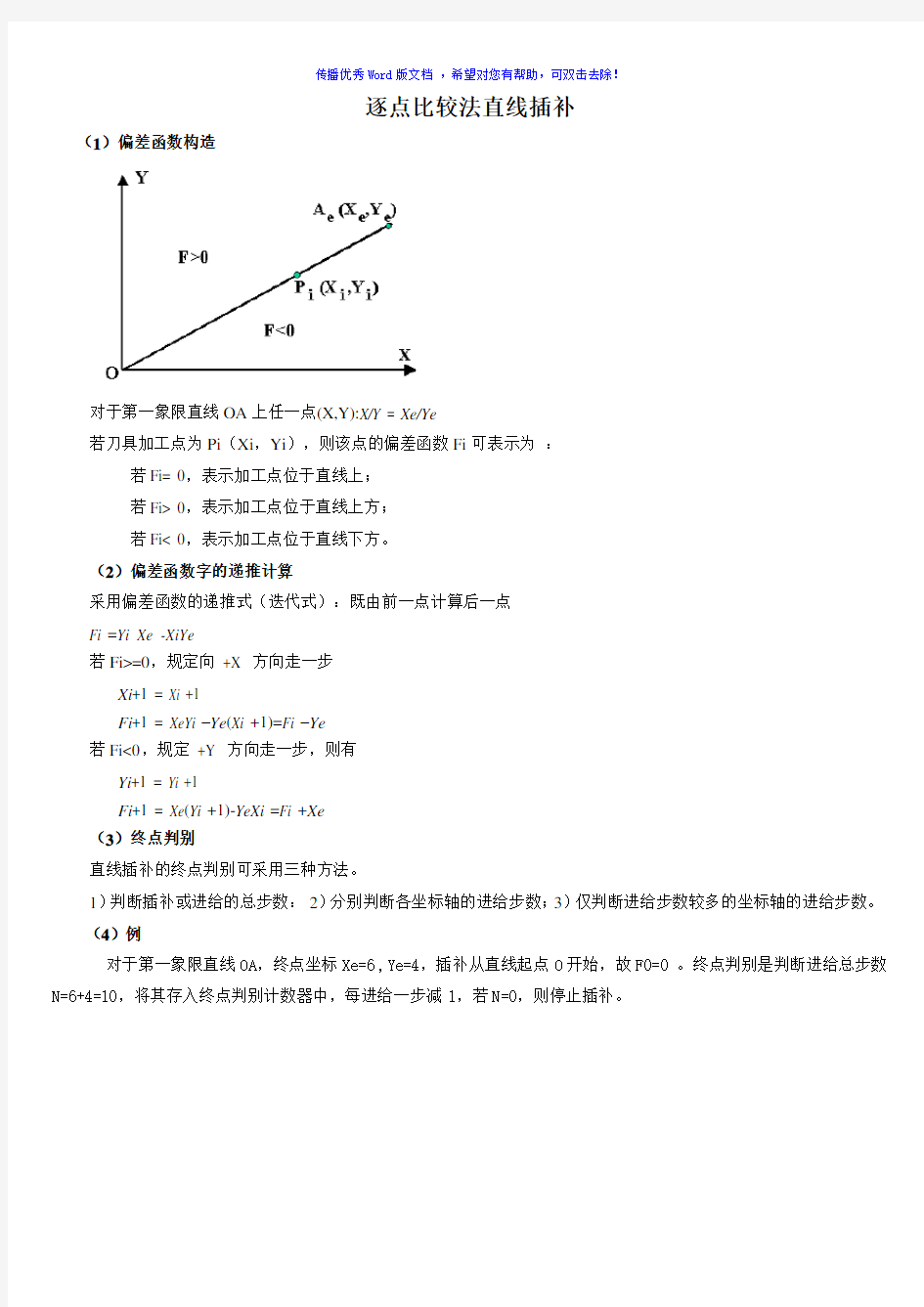
(1)偏差函数构造
对于第一象限直线OA上任一点(X,Y):X/Y = Xe/Ye
若刀具加工点为Pi(Xi,Yi),则该点的偏差函数Fi可表示为:
若Fi= 0,表示加工点位于直线上;
若Fi> 0,表示加工点位于直线上方;
若Fi< 0,表示加工点位于直线下方。
(2)偏差函数字的递推计算
采用偏差函数的递推式(迭代式):既由前一点计算后一点
Fi =Yi Xe -XiYe
若Fi>=0,规定向+X 方向走一步
Xi+1 = Xi +1
Fi+1 = XeYi –Ye(Xi +1)=Fi –Ye
若Fi<0,规定+Y 方向走一步,则有
Yi+1 = Yi +1
Fi+1 = Xe(Yi +1)-YeXi =Fi +Xe
(3)终点判别
直线插补的终点判别可采用三种方法。
1)判断插补或进给的总步数:2)分别判断各坐标轴的进给步数;3)仅判断进给步数较多的坐标轴的进给步数。
(4)例
对于第一象限直线OA,终点坐标Xe=6 ,Ye=4,插补从直线起点O开始,故F0=0 。终点判别是判断进给总步数N=6+4=10,将其存入终点判别计数器中,每进给一步减1,若N=0,则停止插补。
逐点比较法圆弧插补(1)偏差函数构造
任意加工点Pi(Xi,Yi),偏差函数Fi可表示为
若Fi=0,表示加工点位于圆上;
若Fi>0,表示加工点位于圆外;
若Fi <0,表示加工点位于圆内
(2)偏差函数的递推计算
1) 逆圆插补
若F ≥0,规定向-X 方向走一步
若Fi<0,规定向+Y 方向走一步
2) 顺圆插补
若Fi ≥0,规定向-Y 方向走一步
若Fi<0,规定向+y 方向走一步
(3)终点判别
1)判断插补或进给的总步数: 2)分别判断各坐标轴的进给步数: (4)例
对于第一象限圆弧AB ,起点A (4,0),终点B (0,4)
???+-=-+-=-=++12)1(122211i i i i i i
i X F R Y X F X X ???++=-++=+=++12)1(122211i i i i i i i Y F R Y X F Y Y ???+-=--+=-=++12)1(1
22211i i i i i i i Y F R Y X F Y Y ???++=-++=+=++12)1(122211i i i i i i i X F R Y X F X X b
a b a Y Y X X N -+-=b
a x X X N -=
b a y Y Y N -=
插补运动(逐点比较法)
1、概述 在机床的实际加工中,被加工工件的轮廓形状千差万别,各式各样。严格说来,为了满足几何尺寸精度的要求,刀具中心轨迹应该准确地依照工件的轮廓形状来生成。然而,对于简单的曲线,数控装置易于实现,但对于较复杂的形状,若直接生成,势必会使算法变得很复杂,计算机的工作量也相应地大大增加。因此,在实际应用中,常常采用一小段直线或圆弧去进行逼近,有些场合也可以用抛物线、椭圆、双曲线和其他高次曲线去逼近(或称为拟合)。所谓插补是指数据密化的过程。在对数控系统输入有限坐标点(例如起点、终点)的情况下,计算机根据线段的特征(直线、圆弧、椭圆等),运用一定的算法,自动地在有限坐标点之间生成一系列的坐标数据,即所谓数据密化,从而自动地对各坐标轴进行脉冲分配,完成整个线段的轨迹运行,以满足加工精度的要求。 机床数控系统的轮廓控制主要问题就是怎样控制刀具或工件的运动轨迹。无论是硬件数控(NC)系统,还是计算机数控(CNC)系统或微机数控(MNC)系统,都必须有完成插补功能的部分,只是采取的方式不同而已。在CNC或MNC中,以软件(程序)完成插补或软、硬件结合实现插补,而在NC中有一个专门完成脉冲分配计算(即插补计算)的计算装置——插补器。无论是软件数控还是硬件数控,其插补的运算原理基本相同,其作用都是根据给定的信息进行数字计算,在计算过程中不断向各个坐标发出相互协调的进给脉冲,使被控机械部件按指定的路线移动。 有关插补算法问题,除了要保证插补计算的精度之外,还要求算法简单。这对于硬件数控来说,可以简化控制电路,采用较简单的运算器。而对于计算机数控系统来说,则能提高运算速度,使控制系统较快且均匀地输出进给脉冲。 经过多年的发展,插补原理不断成熟,类型众多。从产生的数学模型来分,有直线插补、二次曲线插补等;从插补计算输出的数值形式来分,有基准脉冲插补(又称脉冲增量插补)和数据采样插补。在基准脉冲插补中,按基本原理又分为以区域判别为特征的逐点比较法插补,以比例乘法为特征的数字脉冲乘法器插补,以数字积分法进行运算的数字积分插补,以矢量运算为基础的矢量判别法插补,兼备逐点比较和数字积分特征的比较积分法插补,等等。在CNC系统中,除了可采用上述基准脉冲插补法中的各种插补原理外,还可采用各种数据采样插补方法。 本文将介绍在数控系统中常用的逐点比较法、数字积分法、时间分割法等多种插补方法以及刀具半径补偿计算原理。 2、逐点比较法 逐点比较法是我国数控机床中广泛采用的一种插补方法,它能实现直线、圆弧和非圆二次曲线的插补,插补精度较高。
逐点比较法插补原理实验报告
南昌航空大学实验报告 年月日 课程名称:数控技术实验名称:逐点比较法插补原理 班级:姓名:同组人: 指导老师评定:签名: 一、实验的目的与要求 1.目的 ①掌握逐点比较法插补的原理及过程; ②掌握利用计算机高级语言,设计及调试“插补运算轨迹”模拟画图的程序设计方法; ③进一步加深对插补运算过程的理解; 二、实验仪器 计算机一台 三、实验原理 ①逐点比较法插补运算的原理 首先粗略的简单介绍一下机床是如何按照规定的图形加工出所需的工件的。例如,现在要加工一段圆弧(图2-1),起点为A,终点为B,坐标原点就是圆心,Y轴、X轴代表纵、横拖板的方向,圆弧半径为R。 如从A点出发进行加工,设某一时刻加工点在M1,一般来说M1和圆弧 有所偏离。因此,可根据偏离的情 况确定下一步加工进给的方向,使下 一个加工点尽可能向规定图形(即圆 弧)靠拢。 若用R M1表示加工点M1到圆心O 的距离,显然,当R M1 可以看出,加工的结果是用折线来代替圆弧,为了清楚起见,在图2-1中,每步的步长画的很大,因此加工出来的折线与所需圆弧的误差较大。 若步长缩小,则误差也跟着缩小,实际加工时,进给步长一般为1微米,故实际误差时很小的。 ②计算步骤 由上述可以看出,拖板每进给一步都要完成四个工作节拍。 偏差判别:判别偏差符号,确定加工点是在要求图形外还是在图形内。 工作台进给:根据偏差情况,确定控制X坐标(或Y坐标)进给一步,使加工点向规定的图形靠拢,以缩小偏差。 偏差计算:计算进给一步后加工点与要求图形的新偏差,作为下一步偏差判别的依据。 终点判断:判定是否到达终点,如果未达到终点,继续插补,如果以到达终点,停止插补。 计算步骤的框图如下所示: 图2-2 逐点比较法插补计算步骤 ③插补运算公式 插补运算公式表 四、实验内容及步骤 应用VB设计逐点比较法的插补运算程序,在计算机屏幕上画出轨迹图。 1 程序界面 采用图形显示方式,动态的显示出直线和圆弧的插补过程。 逐点比较法直线插补 (1)偏差函数构造 对于第一象限直线OA上任一点(X,Y):X/Y = Xe/Ye 若刀具加工点为Pi(Xi,Yi),则该点的偏差函数Fi可表示为: 若Fi= 0,表示加工点位于直线上; 若Fi> 0,表示加工点位于直线上方; 若Fi< 0,表示加工点位于直线下方。 (2)偏差函数字的递推计算 采用偏差函数的递推式(迭代式):既由前一点计算后一点 Fi =Yi Xe -XiYe 若Fi>=0,规定向+X 方向走一步 Xi+1 = Xi +1 Fi+1 = XeYi –Ye(Xi +1)=Fi –Ye 若Fi<0,规定+Y 方向走一步,则有 Yi+1 = Yi +1 Fi+1 = Xe(Yi +1)-YeXi =Fi +Xe (3)终点判别 直线插补的终点判别可采用三种方法。 1)判断插补或进给的总步数:2)分别判断各坐标轴的进给步数;3)仅判断进给步数较多的坐标轴的进给步数。 (4)例 对于第一象限直线OA,终点坐标Xe=6 ,Ye=4,插补从直线起点O开始,故F0=0 。终点判别是判断进给总步数N=6+4=10,将其存入终点判别计数器中,每进给一步减1,若N=0,则停止插补。 逐点比较法圆弧插补(1)偏差函数构造 任意加工点Pi(Xi,Yi),偏差函数Fi可表示为 若Fi=0,表示加工点位于圆上; 若Fi >0,表示加工点位于圆外; 若Fi <0,表示加工点位于圆内 (2)偏差函数的递推计算 1) 逆圆插补 若F ≥0,规定向-X 方向走一步 若Fi<0,规定向+Y 方向走一步 2) 顺圆插补 若Fi ≥0,规定向-Y 方向走一步 若Fi<0,规定向+y 方向走一步 (3)终点判别 1)判断插补或进给的总步数: 2)分别判断各坐标轴的进给步数: (4)例 对于第一象限圆弧AB ,起点A (4,0),终点B (0,4) ???+-=-+-=-=++12)1(122211i i i i i i i X F R Y X F X X ???++=-++=+=++12)1(122211i i i i i i i Y F R Y X F Y Y ???+-=--+=-=++12)1(122211i i i i i i i Y F R Y X F Y Y ???++=-++=+=++12)1(122211i i i i i i i X F R Y X F X X b a b a Y Y X X N -+-=b a x X X N -= b a y Y Y N -= 二○一三届毕业设计 基于FPGA逐点比较圆弧插补算法设计 学院:电子与控制工程学院 专业:电子科学与技术 姓名:…….. 学号:……… 指导教师:…….. 完成时间:2013年5月 二〇一三年五月 摘 要 ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ 装 ┊ ┊ ┊ ┊ ┊ 订 ┊ ┊ ┊ ┊ ┊ 线 ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ 摘 要 本课题主要是研究基于VHDL 实现数控系统中的逐点比较圆弧插补,要求圆弧运动过程平滑,在各象限能顺利过渡,并有较小的设计误差,能与运动控制部分很好的集成,实现较高的切割频率。 本课题采用QuartusII 软件来调试程序,并进行波形仿真。主要的工作如下: 1) 理解数控系统中逐点比较圆弧插补算法的原理及其实现方法; 2) 通过硬件描述语言VHDL 在FPGA 上实现上述算法; 3) 完成圆弧插补的仿真与测试。 关键词:VHDL ,FPGA ,逐点比较法,QuartusII ABSTRACT ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ 装 ┊ ┊ ┊ ┊ ┊ 订 ┊ ┊ ┊ ┊ ┊ 线 ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ABSTRACT This topic mainly studies based on VHDL realization of point by point comparison circular arc interpolation in nc system, the movement for arc process smooth, in each quadrant can smooth transition, and a relatively small design error, can very good integration with motion control part, realize the high frequency of cutting. This subject adopts software QuartusII to debug program and waveform simulation. The main work is as follows: 1. Understand CNC system the principle of point by point comparison in circular arc interpolation algorithm and its realization method 2. Through the hardware description language VHDL FPGA to realize the above algorithms. 3. Finish arc interpolation of simulation and test KEY WORDS : VHDL, FPGA, point-by-point comparison, QUARTUS II 直线插补与圆弧插补程序设计 一.直线插补 1. 直线插补程序流程图 #i nclude int x, y; dx = abs(x2-x1); dy = abs(y2-y1); n = dx + dy; if (x2 >= x1) { k y2 >= y1 ? 1: 4; x x1; y y1; } else { k y2 >= y1 ? 2: 3; x x2; y y2; } putpixel(x, y, 1); for (i = 0, f = 0; i < n; i++) if (f >= 0) switch (k) { case 1: else switch (k) { case 1: putpixel(x++, y, f -= dy; break; case 2: putpixel(x, y++, f -= dx; break; case 3: putpixel(x--, y, f -= dy; break; case 4: 1); 1); 1); putpixel(x, y--, 1); } f -= dx; break; putpixel(x, f += dx; break; y++, 1); case 2 : putpixel(x--, f += dy; break; y, 1); case 3 : putpixel(x, f += dx; break; y--, 1); case 4 : putpixel(x++, f += dy; break; y, 1); } } 二. 圆弧插补 2.1. 四象限圆弧插补程序流程图int main() { cb_line(0,0,15,20); /* <--- you forgot return 0; } here */ 逐点比较法直线插补(1)偏差函数构造 对于第一象限直线OA上任一点(X,Y):X/Y=Xe/Ye 若刀具加工点为Pi(Xi,Yi),则该点的偏差函数F i 可表示 为 : 若Fi=0,表示加工点位于直线上; 若Fi>0,表示加工点位于直线上方; 若Fi<0,表示加工点位于直线下方。 (2)偏差函数字的递推计算 采用偏差函数的递推式(迭代式):既由前一点计算后一点 Fi=YiXe-XiYe 若Fi>=0,规定向+X 方向走一步 Xi+1=Xi+1 Fi+1=XeYi–Ye(Xi+1)=Fi–Ye 若Fi<0,规定+Y方向走一步,则有 Yi+1=Yi+1 Fi+1=Xe(Yi+1)-YeXi=Fi+Xe (3)终点判别 直线插补的终点判别可采用三种方法。 1)判断插补或进给的总步数:2)分别判断各坐标轴的进给步数;3)仅判断进给步数较多的坐标轴的进给步数。(4)例 对于第一象限直线OA,终点坐标Xe=6,Ye=4,插补从直线起点O开始,故F0=0。终点判别是判断进给总步数 N=6+4=10,将其存入终点判别计数器中,每进给一步减1,若N=0,则停止插补。 逐点比较法圆弧插补 (1)偏差函数构造 任意加工点Pi(Xi,Yi),偏差函数Fi可表示为若Fi=0,表示加工点位于圆上; 若Fi>0,表示加工点位于圆外; 若Fi<0,表示加工点位于圆内 (2)偏差函数的递推计算 1)逆圆插补 若F≥0,规定向-X方向走一步 X i1X i1 F i1(X i1)2Y i 2R2F i2X i1 若Fi<0,规定向+Y方向走一步 Y i1Y i1 F i1X i2(Y i1)2R2F i2Y i1 实验报告 实验内容:逐点比较法直线和圆弧插补2011年9月25日 院系:物科院班级:085 学号:07080518 姓名:陈实 实验目的: 利用逐点比较法的插补原理,编写直角坐标系下的直线、圆弧插补程序,观察屏幕上仿真的运动轨迹,掌握逐点比较法的插补原理。 实验原理: 逐点比较发是基于动点与理想曲线院函数的比较来实现插补的。逐点比较法的插补过程,每走一步要进行一下四个步骤: 偏差判别:根据偏差值确定刀具相对加工曲线的位置 坐标进给:根据偏差判别的结果,决定控制线沿哪个坐标进给一步以接近曲线 偏差计算:计算新加工店相对曲线的偏差,作为下一步偏差判别的依据 终点判别:判别是否到达终点,未到达终点则返回第一步继续插补,到终点则停止 1、逐点比较法直线插补原理: 逐点比较法在第一象限的直线插补原理如下图所示,其他象限情况可依次类推。 现加工OE直线,如果刀具动点在OE直线上方或在线上,则令刀具沿X正方向进给一步;若刀具动点在OE直线下方,则令刀具沿Y轴正方向进给一步,如此循环直到加工到E点。判别刀具动点的位置根据偏差函数判别公式: 根据这个公式可以推到出两种不同情况下的地推公式: 对于插补终点的判别,可以采用单向的计数长度法,即:取计数长度M等于Xe、Ye中的大者,并设该坐标方向为计数方向。插补时,仅在该方向上产生进给时,计数长度减一。图1的逐点比较法中,工作循环的结束条件就是M减为0. 2、逐点比较法圆弧插补原理: 逐点比较法在第一象限的圆弧插补原理如图所示,其他象限可一次类推: 对于第一象限的逆圆弧,如果动点在圆弧的外侧则令刀具动点沿X轴负方向进给一步。如果动点在圆弧的内侧则令刀具沿Y轴正方向进给一步。 圆弧的偏差计算公式为: 根据这个公式同样可推导出圆弧插补的两种不同情况下的递推公式: 对于插补终点的判别,同样可以采用单向的计数长度法,不过对于圆弧,计数的方向并不取决于终点坐标中的大者,而是取决于圆弧终点处。 逐点比较法插补中需要编写插入部分流程图: 此程序是根据《微型计算机控制技术》(第二版)清华大学出版社 第三章数字控制技术——3.2插补原理中的3.2.1逐点比较法的直线插补,3.2.2逐点比较法圆弧插补编写的。其中的变量定义,原理依据均来源于此,如有疑问,请参考书中的讲解。尤其是例子,以下两个程序的第一个运行图均与例题中的一致。 一、四象限直线插补程序 分别加工第一、二、三、四象限直线,起点均为(0,0),终点坐标为(NX,NY),进行插补计算。 程序中(NX,NY)为终点坐标;NXY为总步数;XOY=1,2,3,4,分别为第一、二、三、四象限; ZF=1,2,3,4,分别代表+x,-x,+y,-y走步方向;FM为加工点偏差,初值为0。 源程序: # include "stdio.h" # include "string.h" # include "math.h" void main() { int NX,NY,NXY,BS,XOY,ZF; int FM=0; char a[10]="+X",b[10]="-X",c[10]="+Y",d[10]="-Y",e[10]; printf("\n\n请输入NX,NY\n"); scanf("%d %d",&NX,&NY); {if(NX>0) if(NY>0) XOY=1; else XOY=4; else if(NY>0) XOY=2; else XOY=3;} printf("终点在第%d象限\n",XOY); printf("\n 步数坐标进给偏差计算终点判断\n\n"); BS=fabs(NX) + fabs(NY); for(NXY= fabs(NX) + fabs(NY)-1;NXY>=0;NXY--) { if(FM>=0) {if(XOY==1||XOY==4) { ZF=1; strcpy(e,a);} else { ZF=2; strcpy(e,b); } FM=FM-fabs(NY); printf(" %d %s FM=%d NXY=%d\n\n",BS-NXY,e, NJ网络实验4 实验目的:a.实现空间一组4个工位的合成直线运动。 工位1(0,0),工位2(2000,2000),工位3(2000, 0),工位4(0,0) b.使用圆弧插补功能,实现下图运动轨迹。(图中数值仅供参考,可自行修改) C.学习齿轮比(变速)MC_gearin,MC_gearout指令。速度比要求3比1 实验器材:NJ、G5伺服及伺服电机两套;E3ZM-V81两个、网线若干(AT部门NJ样机箱)。 参考资料:NJ教材、NJ操作手册、运动控制指令手册 指导人员: 实验内容: 1.样机搭建、网络组建、轴设置在前报告中已经说明,此处省略。其中轴设置中原点返回设置选择如下图 两轴原点返回均为此设置 2.建立轴组: 轴设置完毕后,在“配置和设置”中右键点击轴组设置,在下拉菜单中左键点击添加轴组设置,如下图 添加后,左键双击MC_Group000;在轴组基本设置中“轴组使用”选择“使用轴组”如下图: 构成选择“2轴” 分别将“轴A0”分配MC_Axis000(0);“轴A1”分配MC_Axis001(1)如下图 点击左侧“轴组操作设置”在下图中设置最大插补速度及加速度等, 轴设置完毕 3.编写程序 A、准备程序程序 本次程序依然需要MC_POWER及MC_HOME指令由于与上次程序相同这里不多介绍,程序如下图: 原点返回指令 “MC_GroupEnable”轴组使能指令,以下为手册截图 由于直线插补指令属于轴组指令,如想进行直线插补首先要进行轴组使能指令,否则无法使用对应指令。 将上一步设置好的MC_Group000使能,程序如下 指令“MC_GroupDisable”使能解除指令 与MC_GroupEnable对应指令,被轴组使能后被使能轴只能使用轴组指令,而不能使用轴指令,例如MC_Move等指令,所以程序中需要编写MC_GroupEnable程序 §2—1 逐点比较法 逐点比较法是我国数控机床中广泛采用的一种插补方法,它能实现直线、圆弧和非圆二次曲线的插补,插补精度较高。 逐点比较法,顾名思义,就是每走一步都要将加工点的瞬时坐标同规定的图形轨迹相比较,判断其偏差,然后决定下一步的走向,如果加工点走到图形外面去了,那么下一步就要向图形里面走;如果加工点在图形里面,那么下一步就要向图形外面走,以缩小偏差。这样就能得出一个非常接近规定图形的轨迹,最大偏差不超过一个脉冲当量。 在逐点比较法中,每进给一步都须要进行偏差判别、坐标进给、新偏差计算和终点比较四个节拍。下面分别介绍逐点比较法直线插补和圆弧插补的原理。 一、 逐点比较法直线插补 如上所述,偏差计算是逐点比较法关键的一步。下面以第Ⅰ象限直线为例导出其偏差计算公式。 图 2-1 直 线 差 补 过 程 e ) O Y 图2-1 直线插补过程 点击进入动画观看逐点比较法直线插补 如图2—1所示,假定直线 OA 的起点为坐标原点,终点 A 的坐标为 e e i j A(x ,y ),P(x ,y )为加工点,若P 点正好处在直线 OA 上,那么下式成立: e j i e x y - x y 0= 若任意点 i j P(x ,y )在直线 OA 的上方(严格地说,在直线 OA 与y 轴 所成夹角区域内),那么有下述关系成立: j e i e y y x x > 亦即: e j i e x y - x y 0> 由此可以取偏差判别函数 ij F 为: ij e j i e F x y - x y = 由 ij F 的数值(称为“偏差” )就可以判别出P 点与直线的相对位置。即: 当 ij F =0时,点 i j P(x ,y )正好落在直线上; 当 ij F >0时,点 i j P(x ,y )落在直线的上方; 当 ij F <0时,点 i j P(x ,y )落在直线的下方。 从图2—1看出,对于起点在原点,终点为A ( e e x ,y )的第Ⅰ象限直线OA 来说,当点P 在直线上方(即 ij F >0)时,应该向+x 方向发一个脉冲,使机床 刀具向+x 方向前进一步,以接近该直线;当点P 在直线下方(即 ij F <0)时, 应该向+y 方向发一个脉冲,使机床刀具向+y 方向前进一步,趋向该直线;当点P 正好在直线上(即 ij F =0)时,既可向+x 方向发一脉冲,也可向+y 方向发一 脉冲。因此通常将 ij F >0和 ij F =0归于一类,即 ij F ≥0。这样从坐标原点开始, N=6+4=10,将其存入终点判别计数器中,每进给一步减 1,若N=0,则停止插补。 (1)偏差函数构造 对于第一象限直线 0A 上任一点(X,Y): X/Y = Xe/Ye Pi (Xi , Yi ),则该点的偏差函数 Fi 可表示为: (2 )偏差函数字的递推计算 采用偏差函数的递推式(迭代式):既由前一点计算后一点 Fi =Yi Xe -XiYe 若Fi>=0,规定向 +X 方向走 Xi+1 = Xi +1 Fi+1 = XeYi 讦e(Xi +1)=Fi 讦e 若Fi<0,规定+Y 方向走一步,则有 Yi+1 = Yi +1 Fi+1 = Xe(Yi +1)-YeXi =Fi +Xe (3 )终点判别 直线插补的终点判别可采用三种方法。 逐点比较法直线插补 若刀具加工点为 若 Fi= 0, 表示加工点位于直线上; 若 Fi> 0, 表示加工点位于直线上方; 若 Fi< 0, 表示加工点位于直线下方。 1)判断插补或进给的总步数:2)分别判断各坐标轴的进给步数;3)仅判断进给步数较多的坐标轴的进给步数。 (4)例 对于第一象限直线0A终点坐标Xe=6 ,Ye=4,插补从直线起点0开始,故F0=0。终点判别是判断进给总步数 10 4 逐点比较法圆弧插补(1)偏差函数构造 任意加工点Pi (Xi , Yi),偏差函数Fi可表示为 若Fi=0,表示加工点位于圆上; 若Fi >0,表示加工点位于圆外; 2 若Fi<0,表示加工点位于圆内 (2)偏差函数的递推计 算 1)逆圆插补 若F> 0,规定向-X方向走一步X i 1 X i 若Fi<0,规定向+Y方向走一步 2)顺圆插补 若Fi > 0,规定向-Y方向走一步若Fi<0,规定向+y方向走一步 (3 )终点判 别 1 )判断插补或进给的总步数: 2)分别判断各坐标轴的进给步数: (4)例F i Y i F i Y i F i X i 1 F i 1 N x 对于第一象限圆弧AB,起点A(4,0), (X i Y i X i2 Y i X i2 X i (X i X a X a 终点 1 1)2 (Y i (Y i 1 1)2 X b X b B (0, Y i2 1)2 1)2 Y i2 Y a R2 R2 R2 R2 Y b N y F i F i F i F i Y a 2X i 2Y i 2Y i 2X i Y b 宿迁学院 课程设计说明书 设计题目: 基于VB数字积分法一、二象限逆圆插补计算与仿真 系(部):机电工程系 专业:自动化(数控技术) 班级: 09数控本(2) 姓名:李伟 学号: 200907052 指导老师(签名):刘萍 起止时间:20 12年12月3日至2012年12月7 日共1周 20 12年12 月6 日 正文: 数控原理与系统课程设计说明书 一、课程设计的目的 1)了解连续轨迹控制数控系统的组成原理。 2) 掌握逐点比较法插补的基本原理。 3)握逐点比较法插补的软件实现方法。 二.课程设计的任务 逐点比较法插补是最简单的脉冲增量式插补算法之一,其过程清晰,速度平稳,但一般只用于一个平面内两个坐标轴的插补运算。其基本原理是在刀具按要求轨迹运动加工零件轮廓的过程中,不断比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进 给方向,使刀具向减小偏差的方向进给, 且只有一个方向的进给。也就是说,逐点 比较法每一步均要比较加工点瞬时坐标 与规定零件轮廓之间的距离,依此决定 下一步的走向。如果加工点走到轮廓外 面去了,则下一步要朝着轮廓内部走;如 果加工点处在轮廓的内部,则下一步要 向轮廓外面走,以缩小偏差,这样周而复 始,直至全部结束,从而获得一个非常接 近于数控加工程序规定轮廓的轨迹。逐 点比较法插补过程中的每进给一步都要 经过偏差判别、坐标进给、偏差计算和终点判别四个节拍的处理,其工作流程图如图所示。 三.逐点比较法基本原理 逐点比较法I象限逆圆插补 在加工圆弧过程中,人们很容易联想到使用动点到圆心的距离与该圆弧的名义半径进行比较来反映加工偏差。 假设被加工零件的轮廓为第Ⅰ象限逆走向圆弧SE,,圆心在O(0,0),半径为R,起点为S(XS,YS ),终点为E(Xe,Ye),圆弧上任意加工动点为N (X i,Yi)。当比较该加工动点到圆心的距离ON 与圆弧半径R的大小时,可获得刀具与圆弧轮廓之间的相对位置关系。 当动点N(Xi,Yi )正好落在圆弧上时,则有下式成立 22222R Y X Y X e e i i =+=+ 当动点N(Xi ,Y i)落在圆弧外侧时,则有下式成立 22222R Y X Y X e e i i =+>+ 当动点N (X i,Y i)落在圆弧内侧时,则有下式成立 22222R Y X Y X e e i i =+<+ 由此可见,取逐点比较法圆弧插补的偏差函数表达式为 222R Y X F i i -+= 当动点落在圆外时,为了减小加工误差,应向圆内进给,即向(-X )轴方向走一步;当动点落在圆内时,应向圆外进给,即向(+Y )轴方向走一步。当动点正好落在圆弧上且尚未到达终点时,为了使加工继续下去,理论上向(+Y)轴或(-X)轴方向进给均可以,但一般情况下约定向(-X )轴方向进给。 综上所述,现将逐点比较法第Ⅰ象限逆圆插补规则概括如下: 当F>0时,即2 22 R Y X F i i -+=>0,动点落在圆外,则向(-X )轴方向进给一 步; 当F=0时,即2 22 R Y X F i i -+==0,动点正好落在圆上,约定向(-X)轴方向 电 子 教 案 § 逐点比较法——直线插补 一、概述 二 、直线插补 偏差判别: (1)动点m 在直线上: (2)动点m 在直线上方: (3)动点m 在直线下方: 偏差判别函数 坐标进给 动点m 在直线上: ,可沿+⊿x 轴方向,也可沿+⊿y 方向; 动点m 在直线上方: ,沿+⊿x 方向; 动点m 在直线下方: ,沿+⊿y 方向。 m e m e 0 y x x y -=m e m e 0 y x x y ->m e m e 0 y x x y - 新偏差计算 +⊿x 轴方向进给 +⊿y 轴方向进给 终点比较:用Xe +Ye 作为计数器,每走一步对计数器进行减 1计算,直到计数器为零为止。 m 1m 1e m 1e m e F y x x y F y +++=-=-m 1m e F F x +=+ 教学程序教学内容及教学双边活动与 教学方法 导入 新课讲授 探究总结 在刀具按要求轨迹运动加工零件轮廓的过程中,不断比较刀具 与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的 进给方向,使刀具向减小误差的方向进给。其算法最大偏差不会超 过一个脉冲当量δ。 §逐点比较法——直线插补 一、概述 初称区域判别法,又称代数运算法或醉步式近似法。这种方法 应用广泛,能实现平面直线、圆弧、二次曲线插补,精度高。 每进给一步需要四个节拍: (1)偏差判别:判别加工点对规定图形的偏离位置,决定拖 板进给的走向。 (2)坐标进给:控制某个坐标工作台进给一步,向规定的图 形靠拢,缩小偏差。 (3)偏差计算:计算新的加工点对规定图形的偏差,作为下 一步判别的依据。 (4)终点判断:判断是否到达终点。若到达则停止插补,若 介绍 讲授 图示 分析 讲授法 理解 记忆 数控技术课程设计 说明书 设计题目直线插补与圆弧插补程序设计 机械设计以及自动化专业机械工程学院 机械102班 设计者青岛理工大学 2013年6月20 日 目录 1.设计题目 (1) 2.目录 (2) 3.直线插补流程图 (3) 4.直线插补程序 (4) 5.程序结果 (8) 6.圆弧插补流程图 (9) 7.圆弧插补程序 (10) 8.程序结果 (21) 一.直线插补 1.直线插补程序流程图 2.直线插补程序设计 #include "stdio.h" int i,X,Y,X0,Y0,Xe,Ye,F,N; int a[30][2]; void main() { int m; int menu(); void yi(); void er(); void san(); void si(); void te(); void shuchu(); m=menu(); a[0][0]=X0; a[0][1]=Y0; switch(m) { case 1:yi();shuchu();break; case 2:er();shuchu();break; case 3:san();shuchu();break; case 4:si();shuchu();break; case 5:te();shuchu();break; default:printf("无法插补\n"); } } int menu() { int t; printf("输入起点坐标\n"); scanf("%d,%d",&X0,&Y0); printf("输入终点坐标\n"); scanf("%d,%d",&Xe,&Ye); if (Xe>=X0&&Ye>=Y0) t=1; else if (Xe<=X0&&Ye>=Y0) t=2; else if (Xe<=X0&&Ye<=Y0) t=3; else if (Xe>=X0&&Ye<=Y0) t=4; 实验一工作台直线插补运动 1 实验目的 1.了解工作台直线插补原理和算法; 2.在掌握直线插补原理的基础上实现平面绘图。 2 实验设备 1.直线/旋转工作台; 2.工作台控制箱一台; 3.笔架夹持器、画笔及画板。 3 实验原理 本实验利用逐点比较法插补直线,逐点比较法在第一象限的直线插补原理如下图: 现加工OE直线。如果刀具动点在OE直线上方或在该直线上,则令刀具沿X正方向进给一步;若刀具动点在OE直线下方,则令刀具沿Y轴正方向进给一步,如此循环直到加工到E点。判别刀具动点的位置根据偏差判别公式,第一象限直线插补的偏差判别公式如下: Fi = Xe Y i -Y e X i Fi≥0时,偏差判别公式为 F i+1=F i -Ye 向X正方向进给 Fi<0时,偏差判别公式为 F i+1= F i+Xe,向Y正方向进给 逐点比较法插补节拍:逐点比较法插补需要四个节拍,即偏差判别、进给、偏差计算和终点判别。 4.4 实验步骤 1.按使用说明书上将工作台组合成二自由度直线工作台,安装好笔架夹持器,放置好画板,并正确连接电缆。 2.安装上笔架夹持器及画笔,在桌面相应位置放好画板,使笔尖接触到画板; 3.接通控制箱电源; 4.启动计算机,运行工作台控制软件; 5.在“工作台组合方式”界面中选择X直线工作台和Y直线工作台; 6.单击主界面“工作台复位”按钮,工作台进行回零运动,运动完成后工作台处于零点位置; 7.把画笔安装到笔架夹持器上,使笔尖接触到画板; 8.单击“直线插补”按钮; 9.加速方式选择“梯形”,插补目标X轴填写0,Y轴填写-30,点击“运动”按钮,画出一条直线, 10.插补目标X轴填写30,Y轴填写30,点击“运动”, 11.插补目标X轴填写30,Y轴填写0,点击“运动”, 目录 一、课程设计介绍 1.1 任务说明 (3) 1.2要求 (3) 二、程序操作及算法流程图 2.1 DDA法插补直线流程 (3) 2.2逐点比较法插补逆时针圆弧流程 (4) 三、用户使用说明 3.1 程序开始运行时显示介面 (5) 3.2 执行计算 (5) 3.3 DDA法直线插补实例 (6) 3.4 逐点比较法插补第二三象限逆时针圆弧 (7) 四、主要算法及源程序 4.1 程序设计概述 (8) 4.2 主要算法的实现 (8) 4.2.1 参数声明 (8) 4.2.2复位操作 (9) 4.2.3单步操作 (11) 4.2.4 连续插补 (11) 4.2.5 辅助操作 (13) 五、本设计的特点 (13) 六、课程设计的感想 (13) 七、主要参考文献 (14) 一、课程设计介绍 1.1、任务说明:(1)直线插补:DL1, DDA 法第一象限直线插补。 (2)圆弧插补:PA23,逐点比较法二三象限顺圆弧插补。 1.2、要求:(1)具有数据输入界面,如:起点,终点,圆心,半径及插补步长。 (2)具有插补过程的动态显示功能,如:但单步插补,连续插补,插补步长可调。 本课程设计的题目要求是DDA数字积分法插补第一象限直线,逐点比较法插补二三象限顺圆弧。由于本课设要求只为二三象限,故默认为劣弧插补。此外,对于两种插补对象均可根据需要改变插补步长,以表现不同的插补效果。在插补显示过程中,有两种插补显示方式,即手动单步插补和自动连续插补动态显示。 二、程序操作及算法流程图 2.1 DDA 法插补直线流程 初始化sx sy ex ey 步长bc 寄存器vx1 vy1 累加器 rx1 ry1 rx1=rx1+vx1 ry1=ry1+vy1 ry1是否溢出 rx1是否溢出 是否到达终点 结束 +x 走一个步长 +y 走一个步长 N Y N Y N Y 开始 学院 毕业论文(设计) 2015 届机械设计制造及其自动化专业 13 班级 题目逐点比较插补算法设计 姓名学号 1 指导教师职称教授 二О一五年五月二十一日 摘要 逐点比较法是数控加工中常用的插补方法,通过控制刀具每次移动的位置与理想位置的误差函数进而实现零件加工,鉴于VB编程简单、直观,采用VB可以实现逐点比较插补原理的相关程序设计及加工过程虚拟化。插补技术是机床数控系统的核心技术,逐点比较法可以实现直线和圆弧插补算法,其算法的优劣直接影响零件直线和圆弧轮廓的加工精度和加工速度。文章在传统的逐点比较直线插补与圆弧插补算法的基础上,提出以八方向进给取代传统的四方向进给,研究了偏差最小的走步方向的实现方法,同时研究了保证数控机床坐标进给连续的偏差递推计算过程。结果表明,新算法可以提高零件轮廓的逼近精度且减少了插补计算次数,从而提高了零件直线和圆弧轮廓的加工精度和加工速度。 关键词 数控;插补;逐点比较;逼近;偏差函数 The algorithm design of point-to-point comparison Author: LI Zhiyuan Tutor: Chen Liangji Abstract Abstract: The algorithm of point-to-point comparison is a typical plugging method in processing of numerical control,manufacturing parts by controlling error function between the position the cutting tool moves to and the perfect program is simple and visual,which can visualize the programming and processing of The algorithm of point-to-point comparison. Interpolation technology is the core technology of machine tool’s CNC system. The algorithm of point-to-point comparison can achieve the algorithms of linear and circular algorithm of point-to-point comparison 武汉理工大学华夏学院 课程设计报告书 题目: 系名: 专业班级: 姓名: 学号: 指导教师: 2011 年 6 月14 日 摘要 本文主要讨论利用逐点比较法实现第一象限的直线插补。所谓逐点比较插补,就是刀具或绘图笔每走一步都要和给点轨迹上的坐标值进行比较,看这点在给点轨迹的上方还是下方,从而决定下一步的进给方向。对于本设计所要求的直线轨迹,如果该点在直线的上方,则控制步进电机向+X方向进给一步,如果该点在直线的下方,那么控制步进电机向+Y轴方向进给一步。如此,走一步、看一看,比较一次,决定下一步的走向,以便逼近给定轨迹,即形成逐点比较插补。 插补计算时,每走一步,都要进行以下四个步骤的计算过程,即偏差判别、坐标进给、偏差计算、终点判断。设计具体算法时,首先根据直线轨迹参数,计算出偏差计算公式及递推公式。由程序判断出偏差的正负号,从而决定坐标的进给方向,再根据递推公式计算出坐标进给后的偏差,若未到达终点,则返回偏差判别,如此循环。可以根据起点和终点的坐标位置,计算出总的进给步数Nxy,X或Y的坐标每进给一步,这个值就减一,若Nxy=0,就到达了终点,这就是终点判别的方法。 设计任务及要求 设计一个计算机控制步进电机系统,该系统利用PC 机的并口输出控制信号,其信号驱动后控制X 、Y 两个方向的三相步进电机转动,利用逐点比较法插补绘制出各种曲线。 1)设计硬件系统,画出电路原理框图; 2)定义步进电机转动的控制字; 3)推导出用逐点比较法插补绘制出下面曲线的算法; 4)编写算法控制程序线; 5)撰写设计说明书。 每人选一个曲线,曲线均为第一象限,屏幕左下角为坐标原点,箭头表示曲线绘制的方向,直线参数为:起点、终点坐标。圆弧参数为:起点、终点坐标和半径。 直线一: 直线二: 直线三 直线四 圆弧一 圆弧二 X Y O X Y O X Y O X Y O X Y O X Y O VB界面: 直线插补和圆弧插补的程序代码: Dim x1%, y1%, x2%, y2%, p! Dim Di As Integer Const PI = 3.14159 Private Sub cmdShow_Click() x1 = Val(Text1(0)): y1 = Val(Text1(1)) x2 = Val(Text1(2)): y2 = Val(Text1(3)) pic.Cls axis pic p = Val(Combo1.Text) cmdShow.Enabled = False If Option1.Value Then pic.Circle (x1, y1), 0.1, vbBlack pic.Circle (x2, y2), 0.1, vbBlack zhixian pic, x1, y1, x2, y2 ElseIf Option2.Value Then pic.Circle (x1, y1), 0.1, vbBlack pic.Circle (x2, y2), 0.1, vbBlack If x1 ^ 2 + y1 ^ 2 = x2 ^ 2 + y2 ^ 2 Then yuanhu pic, x1, y1, x2, y2 Else MsgBox "ERROR!请重新输入!", vbCritical End If End If cmdShow.Enabled = True End Sub Private Sub zhixian(obj As Object, xi%, yi%, xj%, yj%) Dim x!, y! f = 0 x = xi: y = yi obj.Line (xi, yi)-(xj, yj), vbBlack obj.CurrentX = x obj.CurrentY = y n = (Abs(xj - xi) + Abs(yj - yi)) / p While n <> 0 If f >= 0 Then If xj <> xi Then x = x + (xj - xi) / Abs(xj - xi) * p Else y = y + (yj - yi) / Abs(yj - yi) * p End If f = f - Abs(yj - yi) Else If yj <> yi Then y = y + (yj - yi) / Abs(yj - yi) * p End If f = f + Abs(xj - xi) End If obj.Line -(x, y), vbRed n = n - 1 DoEvents For i = 1 To 2000000 * p Next i Wend End Sub Private Sub Form_Load() If App.PrevInstance Then End Combo1.Text = Combo1.List(6) pic.Height = 460 pic.Width = 460逐点比较法直线插补圆弧插补实例
基于FPGA的逐点比较圆弧插补算法设计
直线插补与圆弧插补程序设计
逐点比较法直线插补圆弧插补实例
逐点比较法插补实验报告
直线及圆弧插补程序--逐点比较法
欧姆龙NJ直线插补及圆弧插补
逐点比较法直线插补
逐点比较法直线插补圆弧插补实例
VB软件_模拟逐点比较法逆圆弧插补的程序设计
逐点比较法——直线插补
C语言模拟直线插补与圆弧插补程序设计
直线与圆弧插补实验
数控机床DDA数字积分法插补第一象限直线,逐点比较法插补二三象限顺圆弧
逐点比较插补算法设计
逐点比较法直线插补原理的实现
逐点比较法直线插补代码VB