RLC电路matlab仿真

开关电源《基于MatlabSimulink的BOOST电路仿真》
基于Matlab/Simulink 的BOOST电路仿真 姓名: 学号: 班级: 时间:2010年12月7日
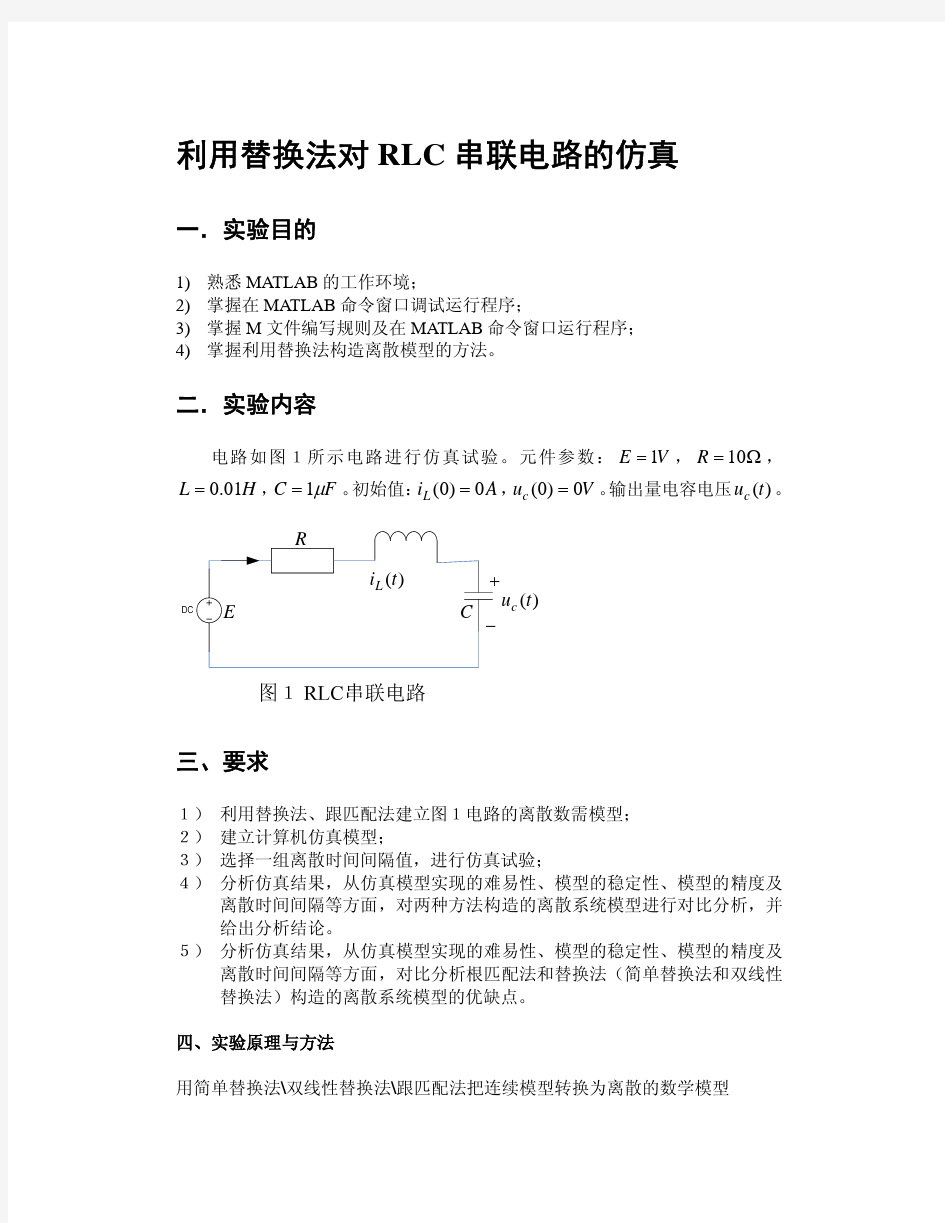
1引言 BOOST 电路又称为升压型电路, 是一种直流- 直流变换电路, 其电路结构如图1 所示。此电路在开关电源领域内占有非常重要的地位, 长期以来广泛的应用于各种电源设备的设计中。对它工作过程的理解掌握关系到对整个开关电源领域各种电路工作过程的理解, 然而现有的书本上仅仅给出电路在理想情况下稳态工作过程的分析, 而没有提及电路从启动到稳定之间暂态的工作过程, 不利于读者理解电路的整个工作过程和升压原理。采用matlab仿真分析方法, 可直观、详细的描述BOOST 电路由启动到达稳态的工作过程, 并对其中各种现象进行细致深入的分析, 便于我们真正掌握BOO ST 电路的工作特性。 图1BOO ST 电路的结构 2电路的工作状态 BOO ST 电路的工作模式分为电感电流连续工作模式和电感电流断续工作模式。其中电流连续模式的电路工作状态如图2 (a) 和图2 (b) 所示, 电流断续模式的电路工作状态如图2 (a)、(b)、(c) 所示, 两种工作模式的前两个工作状态相同, 电流断续型模式比电流连续型模式多出一个电感电流为零的工作状态。 (a) 开关状态1 (S 闭合) (b) 开关状态2 (S 关断) (c) 开关状态3 (电感电流为零) 图2BOO ST 电路的工作状态
3matlab仿真分析 matlab 是一种功能强大的仿真软件, 它可以进行各种各样的模拟电路和数字电路仿真,并给出波形输出和数据输出, 无论对哪种器件和哪种电路进行仿真, 均可以得到精确的仿真结果。本文应用基于matlab软件对BOO ST 电路仿真, 仿真图如图3 所示,其中IGBT作为开关, 以脉冲发生器脉冲周期T=0.2ms,脉冲宽度为50%的通断来仿真图2 中开关S的通断过程。 图3BOO ST 电路的PSp ice 模型 3.1电路工作原理 在电路中IGBT导通时,电流由E经升压电感L和V形成回路,电感L储能;当IGBT关断时,电感产生的反电动势和直流电源电压方向相同互相叠加,从而在负载侧得到高于电源的电压,二极管的作用是阻断IGBT导通是,电容的放电回路。调节开关器件V的通断周期,可以调整负载侧输出电流和电压的大小。负载侧输出电压的平均值为: (3-1) 式(3-1)中T为开关周期, 为导通时间,为关断时间。
时域有限差分法的Matlab仿真
时域有限差分法的Matlab仿真 关键词: Matlab 矩形波导时域有限差分法 摘要:介绍了时域有限差分法的基本原理,并利用Matlab仿真,对矩形波导谐振腔中的电磁场作了模拟和分析。 关键词:时域有限差分法;Matlab;矩形波导;谐振腔 目前,电磁场的时域计算方法越来越引人注目。时域有限差分(Finite Difference Time Domain,FDTD)法[1]作为一种主要的电磁场时域计算方法,最早是在1966年由K. S. Yee提出的。这种方法通过将Maxwell旋度方程转化为有限差分式而直接在时域求解,通过建立时间离散的递进序列,在相互交织的网格空间中交替计算电场和磁场。经过三十多年的发展,这种方法已经广泛应用到各种电磁问题的分析之中。 Matlab作为一种工程仿真工具得到了广泛应用[2]。用于时域有限差分法,可以简化编程,使研究者的研究重心放在FDTD法本身上,而不必在编程上花费过多的时间。 下面将采用FDTD法,利用Matlab仿真来分析矩形波导谐振腔的电磁场,说明了将二者结合起来的优越性。 1FDTD法基本原理 时域有限差分法的主要思想是把Maxwell方程在空间、时间上离散化,用差分方程代替一阶偏微分方程,求解差分方程组,从而得出各网格单元的场值。FDTD 空间网格单元上电场和磁场各分量的分布如图1所示。 电场和磁场被交叉放置,电场分量位于网格单元每条棱的中心,磁场分量位于网格单元每个面的中心,每个磁场(电场)分量都有4个电场(磁场)分量环绕。这样不仅保证了介质分界面上切向场分量的连续性条件得到自然满足,而且
还允许旋度方程在空间上进行中心差分运算,同时也满足了法拉第电磁感应定律和安培环路积分定律,也可以很恰当地模拟电磁波的实际传播过程。 1.1Maxwell方程的差分形式 旋度方程为: 将其标量化,并将问题空间沿3个轴向分成若干网格单元,用Δx,Δy和Δz 分别表示每个网格单元沿3个轴向的长度,用Δt表示时间步长。网格单元顶点的坐标(x,y,z)可记为: 其中:i,j,k和n为整数。 同时利用二阶精度的中心有限差分式来表示函数对空间和时间的偏导数,即可得到如下FDTD基本差分式: 由于方程式里出现了半个网格和半个时间步,为了便于编程,将上面的差分式改写成如下形式:
各种BP学习算法MATLAB仿真
3.3.2 各种BP学习算法MATLAB仿真 根据上面一节对BP神经网络的MATLAB设计,可以得出下面的通用的MATLAB程序段,由于各种BP学习算法采用了不同的学习函数,所以只需要更改学习函数即可。 MATLAB程序段如下: x=-4:0.01:4; y1=sin((1/2)*pi*x)+sin(pi*x); %trainlm函数可以选择替换 net=newff(minmax(x),[1,15,1],{'tansig','tansig','purelin'},'trainlm'); net.trainparam.epochs=2000; net.trainparam.goal=0.00001; net=train(net,x,y1); y2=sim(net,x); err=y2-y1; res=norm(err); %暂停,按任意键继续 Pause %绘图,原图(蓝色光滑线)和仿真效果图(红色+号点线) plot(x,y1); hold on plot(x,y2,'r+'); 注意:由于各种不确定因素,可能对网络训练有不同程度的影响,产生不同的效果。如图3-8。 标准BP算法(traingd)
图3-8 标准BP算法的训练过程以及结果(原图蓝色线,仿真图+号线)增加动量法(traingdm) 如图3-9。 图3-9 增加动量法的训练过程以及结果(原图蓝色线,仿真图+号线)弹性BP算法(trainrp)如图3-10 图3-10 弹性BP算法的训练过程以及结果(原图蓝色线,仿真图+号线)
动量及自适应学习速率法(traingdx)如图3-11。 图3-11 动量及自适应学习速率法的训练过程以及结果(原图蓝色线,仿真图+号线)共轭梯度法(traincgf)如图3-12。
基于matlab的电路仿真
基于matlab的电路仿真 杨泽辉51130215 %基于matlab的电路仿真 %关键词: RC电路仿真, matlab, GUI设计 % 基于matlab的电路仿真 %功能:产生根据输入波形与电路的选择产生输出波形 close all;clear;clc; %清空 figure('position',[189 89 714 485]); %创建图形窗口,坐标(189,89),宽714,高485;Na=['输入波形[请选择]|输入波形:正弦波|',... '输入波形:方形波|输入波形:脉冲波'];%波形选择名称数组; Ns={'sin','square','pulse'}; %波形选择名称数组; R=2; % default parameters: resistance 电阻值 C=2; % default parameters: capacitance电容值 f=10; % default parameters: frequency 波形频率 TAU=R*C; tff=10; % length of time ts=1/f; % sampling length sys1=tf([1],[1,1]); % systems for integral circuit %传递函数; sys2=tf([1,0],[1,1]); % systems for differential circuit a1=axes('position',[0.1,0.6,0.3,0.3]); %创建坐标轴并获得句柄; po1=uicontrol(gcf,'style','popupmenu',... %在第一个界面的上方创建一个下拉菜单'unit','normalized','position',[0.15,0.9,0.2,0.08],... %位置 'string',Na,'fontsize',12,'callback',[]); %弹出菜单上的字符为数组Na,字体大小为12, set(po1,'callback',['KK=get(po1,''Value'');if KK>1;',... 'st=char(Ns(KK-1));[U,T]=gensig(st,R*C,tff,1/f);',... 'axes(a1);plot(T,U);ylim([min(U)-0.5,max(U)+0.5]);',... 'end;']); %pol触发事件:KK获取激发位置,st为当前触发位置的字符串,即所选择的波形类型; %[U,T],gensing,产生信号,类型为st的值,周期为R*C,持续时间为tff, %采样周期为1/f,U为所产生的信号,T为时间; %创建坐标轴al;以T为x轴,U为y轴画波形,y轴范围。。。 Ma=['电路类型[请选择]|电路类型:积分型|电路类型:微分型']; %窗口2电路类型的选择数组; a2=axes('position',[0.5,0.6,0.3,0.3]);box on; %创建坐标轴2; set(gca,'xtick',[]);set(gca,'ytick',[]); %去掉坐标轴的刻度 po2=uicontrol(gcf,'style','popupmenu',... %在第二个窗口的位置创建一个下拉菜单,同1 'unit','normalized','position',[0.55,0.9,0.2,0.08],... 'string',Ma,'fontsize',12,'callback',[]); set(po2,'callback',['KQ=get(po2,''Value'');axes(a2);',... %po2属性设置,KQ为选择的电路类型,'if KQ==1;cla;elseif KQ==2;',... %1则清除坐标轴,2画积分电路,3画微分电路 'plot(0.14+0.8i+0.02*exp(i*[0:.02:8]),''k'');hold on;',... 'plot(0.14+0.2i+0.02*exp(i*[0:.02:8]),''k'');',... 'plot(0.84+0.2i+0.02*exp(i*[0:.02:8]),''k'');',... 'plot(0.84+0.8i+0.02*exp(i*[0:.02:8]),''k'');',... 'plot([0.16,0.82],[0.2,0.2],''k'');',... 'plot([0.16,0.3],[0.8,0.8],''k'');',... 'plot([3,4,4,3,3]/10,[76,76,84,84,76]/100,''k'');',... 'plot([0.4,0.82],[0.8,0.8],''k'');',... 'plot([0.6,0.6],[0.8,0.53],''k'');',... 'plot([0.6,0.6],[0.2,0.48],''k'');',... 'plot([0.55,0.65],[0.53,0.53],''k'');',... 'plot([0.55,0.65],[0.48,0.48],''k'');',... 'text(0.33,0.7,''R'');',...
内点法matlab仿真doc资料
编程方式实现: 1.惩罚函数 function f=fun(x,r) f=x(1,1)^2+x(2,1)^2-r*log(x(1,1)-1); 2.步长的函数 function f=fh(x0,h,s,r) %h为步长 %s为方向 %r为惩罚因子 x1=x0+h*s; f=fun(x1,r); 3. 步长寻优函数 function h=fsearchh(x0,r,s) %利用进退法确定高低高区间,利用黄金分割法进行求解h1=0;%步长的初始点 st=0.001; %步长的步长 h2=h1+st; f1=fh(x0,h1,s,r); f2=fh(x0,h2,s,r); if f1>f2 h3=h2+st; f3=fh(x0,h3,s,r); while f2>f3 h1=h2; h2=h3; h3=h3+st; f2=f3; f3=fh(x0,h3,s,r); end else st=-st; v=h1; h1=h2; h2=v; v=f1; f1=f2; f2=v; h3=h2+st; f3=fh(x0,h3,s,r); while f2>f3 h1=h2; h2=h3; h3=h3+st; f2=f3;
f3=fh(x0,h3,s,r); end end %得到高低高的区间 a=min(h1,h3); b=max(h1,h3); %利用黄金分割点法进行求解 h1=1+0.382*(b-a); h2=1+0.618*(b-a); f1=fh(x0,h1,s,r); f2=fh(x0,h2,s,r); while abs(a-b)>0.0001 if f1>f2 a=h1; h1=h2; f1=f2; h2=a+0.618*(b-a); f2=fh(x0,h2,s,r); else b=h2; h2=h1; f2=f1; h1=a+0.382*(b-a); f1=fh(x0,h1,s,r); end end h=0.5*(a+b); 4. 迭代点的寻优函数 function f=fsearchx(x0,r,epson) x00=x0; m=length(x0); s=zeros(m,1); for i=1:m s(i)=1; h=fsearchh(x0,r,s); x1=x0+h*s; s(i)=0; x0=x1; end while norm(x1-x00)>epson x00=x1; for i=1:m s(i)=1; h=fsearchh(x0,r,s);
PID控制算法的matlab仿真
PID 控制算法的matlab 仿真 PID 控制算法就是实际工业控制中应用最为广泛的控制算法,它具有控制器设计简单,控制效果好等优点。PID 控制器参数的设置就是否合适对其控制效果具有很大的影响,在本课程设计中一具有较大惯性时间常数与纯滞后的一阶惯性环节作为被控对象的模型对PID 控制算法进行研究。被控对象的传递函数如下: ()1d s f Ke G s T s τ-= + 其中各参数分别为30,630,60f d K T τ===。MATLAB 仿真框图如图1所示。 图1 2 具体内容及实现功能 2、1 PID 参数整定 PID 控制器的控制参数对其控制效果起着决定性的作用,合理设置控制参数就是取得较好的控制效果的先决条件。常用的PID 参数整定方法有理论整定法与实验整定法两类,其中常用的实验整定法由扩充临界比例度法、试凑法等。在此处选用扩充临界比例度法对PID 进行整定,其过程如下: 1) 选择采样周期 由于被控对象中含有纯滞后,且其滞后时间常数为 60d τ=,故可选择采样周期1s T =。 2) 令积分时间常数i T =∞,微分时间常数0d T =,从小到大调节比例系数K , 使得系统发生等幅震荡,记下此时的比例系数k K 与振荡周期k T 。 3) 选择控制度为 1.05Q =,按下面公式计算各参数:
0.630.490.140.014p k i k d k s k K K T T T T T T ==== 通过仿真可得在1s T =时,0.567,233k k K T ==,故可得: 0.357,114.17,32.62, 3.262p i d s K T T T ==== 0.0053.57 p s i i p d d s K T K T K T K T === = 按此组控制参数得到的系统阶跃响应曲线如图2所示。 01002003004005006007008009001000 0.20.40.60.811.21.41.6 1.8 图2 由响应曲线可知,此时系统虽然稳定,但就是暂态性能较差,超调量过大,且响应曲线不平滑。根据以下原则对控制器参数进行调整以改善系统的暂态过程: 1) 通过减小采样周期,使响应曲线平滑。 2) 减小采样周期后,通过增大积分时间常数来保证系统稳定。 3) 减小比例系数与微分时间常数,以减小系统的超调。 改变控制器参数后得到系统的阶跃响应曲线如图3所示,系统的暂态性能得到明显改善、
实验一 典型环节的MATLAB仿真汇总
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、SIMULINK 的使用 MATLAB 中SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。利用SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。 1.运行MATLAB 软件,在命令窗口栏“>>”提示符下键入simulink 命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK 仿真 环境下。 2.选择File 菜单下New 下的Model 命令,新建一个simulink 仿真环境常规模板。 3.在simulink 仿真环境下,创建所需要的系统 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G 实验处理:1)(1=s G SIMULINK 仿真模型
波形图为: 实验处理:2)(1=s G SIMULINK 仿真模型 波形图为: 实验结果分析:增加比例函数环节以后,系统的输出型号将输入信号成倍数放大. ② 惯性环节11)(1+= s s G 和15.01)(2+=s s G 实验处理:1 1 )(1+=s s G SIMULINK 仿真模型
波形图为: 实验处理:1 5.01 )(2+= s s G SIMULINK 仿真模型 波形图为: 实验结果分析:当1 1 )(1+= s s G 时,系统达到稳定需要时间接近5s,当
LMMSE算法信道均衡MATLAB仿真
一.信道均衡的概念 实际的基带传输系统不可能完全满足无码间串扰传输条件,因而码间串扰是不可避免的。当串扰严重时,必须对系统的传输函数 进行校正,使其达到或接近无码间串扰要求的特性。理论和实践表明,在基带系统中插入一种可调滤波器就可以补偿整个系统的幅频,和相频特性从而减小码间串扰的影响这个对系统校正的过程称为均衡,实现均衡的滤波器称为均衡器。 均衡分为频域均衡和时域均衡。频域均衡是从频率响应考虑,使包括均衡器在内的整个系统的总传输函数满足无失真传输条件。而时域均衡,则是直接从时间响应考虑,使包括均衡器在内的整个系统的冲激响应满足无码间串扰条件。 频域均衡在信道特性不变,且传输低速率数据时是适用的,而时域均衡可以根据信道特性的变化进行调整,能够有效地减小码间串扰,故在高速数据传输中得以广泛应用。 时域均衡的实现方法有多种,但从实现的原理上看,大致可分为预置式自动均衡和自适应式自动均衡。预置式均衡是在实际传数之前先传输预先规定的测试脉冲(如重复频率很低的周期性的单脉冲波形),然后按“迫零调整原理”自动或手动调整抽头增益;自适应式均衡是在传数过程中连续测出距最佳调整值的误差电压,并据此电压去调整各抽头增益。一般地,自适应均衡不仅可以使调整精度提高,而且当信道特性随时间变化时又能有一定的自适应性,因此很受重视。这种均衡器过去实现起来比较复杂,但随着大规模、超大规模集成电路和微处理机的应用,其发展十分迅速。 二.信道均衡的应用 1.考虑如图所示的基带等效数据传输系统,发送信号k x 经过ISI 失真信道传输,叠加高斯加性噪声。 图1基带等效数据传输模型 设发送信号采用QPSK 调制,即(1)k x j =±±ISI 信道的冲击响应以向量的形式表示为h 2211[,,,]T L L L h h h --+=???。典型的ISI 信道响应向量有三种: h [0.04,0.05,0.07,0.21,0.5,0.72,0.36,0,0.21,0.03,0.07]T A =--- h [0.407,0.815,0.407]T B = h [0.227,0.46,0.6888,0.46,0.227]T C = k ω为实部与虚部独立的复高斯白噪声,其均值为零,方差为2 ωσ。 2.实现目的
基于MATLAB的电力系统仿真
《电力系统设计》报告 题目: 基于MATLAB的电力系统仿学院:电子信息与电气工程学院 班级: 13级电气 1 班 姓名:田震 学号: 20131090124 日期:2015年12月6日
基于MATLAB的电力系统仿真 摘要:目前,随着科学技术的发展和电能需求量的日益增长,电力系统规模越来越庞大,超高压远距离输电、大容量发电机组、各种新型控制装置得到了广泛的应用,这对于合理利用能源,充分挖掘现有的输电潜力和保护环境都有重要意义。另一方面,随着国民经济的高速发展,以城市为中心的区域性用电增长越来越快,大电网负荷中心的用电容量越来越大,长距离重负荷输电的情况日益普遍,电力系统在人们的生活和工作中担任重要角色,电力系统的稳定运行直接影响着人们的日常生活。从技术和安全上考虑直接进行电力试验可能性很小,因此迫切要求运用电力仿真来解决这些问题。 电力系统仿真是将电力系统的模型化、数学化来模拟实际的电力系统的运行,可以帮助人们通过计算机手段分析实际电力系统的各种运行情况,从而有效的了解电力系统概况。本文根据电力系统的特点,利用MATLAB的动态仿真软件Simulink搭建了无穷大电源的系统仿真模型,得到了在该系统主供电线路电源端发生三相短路接地故障并由故障器自动跳闸隔离故障的仿真结果,并分析了这一暂态过程。通过仿真结果说明MATLAB电力系统工具箱是分析电力系统的有效工具。 关键词:电力系统;三相短路;故障分析;MATLAB仿真
目录 一.前言 (4) 二.无穷大功率电源供电系统仿真模型构建 (5) 1.总电路图的设计 (5) 2.各个元件的参数设定 (6) 2.1供电模块的参数设定 (6) 2.2变压器模块的参数设置 (6) 2.3输电线路模块的参数设置 (7) 2.4三相电压电流测量模块 (8) 2.5三相线路故障模块参数设置 (8) 2.6三相并联RLC负荷模块参数设置 (9) 3.仿真结果 (9)
神经网络学习算法matlab仿真
东南大学自动化学院 智能控制概论 神经网络学习算法研究 学院: 姓名: 学号: 日期:
目录 1 任务要求叙述 ..................................................... 错误!未定义书签。 2 系统分析及设计原理 ......................................... 错误!未定义书签。 3 设计实现.............................................................. 错误!未定义书签。4仿真验证.. (6) 5 讨论与分析.......................................................... 错误!未定义书签。
一.任务要求叙述 (1)任务 (a) 运行算法,观察和分析现有学习算法的性能; clear all;close all; nu=20;pi=3.1415926; for i=1:nu p(i)=2*pi*i/nu; t(i)=0.5*(1+cos(p(i))); end minmax=[min(p(:)) max(p(:))] net = newff([ 0 7],[6 1],{'logsig' 'purelin'},'traingd');% traingd traingdm trainlm net.trainParam.epochs = 10000; net.trainParam.goal = 0.0001; net.trainParam.show=200; net.trainParam.lr=0.1; net.trainParam.mc=0.6; %0.9 default value; available for momentum net = train(net,p,t); y1 = sim(net,p); figure(2); plot(p,t,'*-',p,y1,'r--') %************** test data ****************** nu2=nu*3/2; for i=1:(nu2) p2(i)=2*pi*i/(nu2); t2(i)=0.5*(1+cos(p2(i))); end y2 = sim(net,p2); figure(3); plot(t2,'*-');hold on; plot(y2,'r'); xlabel('times');ylabel('outputs'); figure(4); plot(t2-y2); xlabel('times');ylabel('error'); (b) 为了进一步提高学习逼近效果,可以采取那些措施,调节规律如何?根据所提的每种措施,修改算法程序,给出仿真效果验证、过程以及相应的曲线图,给出适当的评述;(c) 联系、结合前向神经网络的算法样本学习、测试等过程,谈谈本人对神经网络系统的一些认识和看法。 (2)要求 提交完整的报告,包括:封面(题目、个人学号姓名等信息)、目录、任务要求叙述、系
时域有限差分法对平面TE波的MATLAB仿真
时域有限差分法对平面TE波的 MATLAB仿真 摘要 时域有限差分法是由有限差分法发展出来的数值计算方法。自1966年Yee 在其论文中首次提出时域有限差分以来,时域有限差分法在电磁研究领域得到了广泛的应用。主要有分析辐射条线、微波器件和导行波结构的研究、散射和雷达截面计算、分析周期结构、电子封装和电磁兼容的分析、核电磁脉冲的传播和散射以及在地面的反射及对电缆传输线的干扰、微光学元器件中光的传播和衍射特性等等。 由于电磁场是以场的形态存在的物质,具有独特的研究方法,采取重叠的研究方法是其重要的特点,即只有理论分析、测量、计算机模拟的结果相互佐证,才可以认为是获得了正确可信的结论。时域有限差分法就是实现直接对电磁工程问题进行计算机模拟的基本方法。在近年的研究电磁问题中,许多学者对时域脉冲源的传播和响应进行了大量的研究,主要是描述物体在瞬态电磁源作用下的理论。另外,对于物体的电特性,理论上具有几乎所有的频率成分,但实际上,只有有限的频带内的频率成分在区主要作用。 文中主要谈到了关于高斯制下完全匹配层的差分公式的问题,通过MATLAB 程序对TE波进行了仿真,模拟了高斯制下完全匹配层中磁场分量瞬态分布。得到了相应的磁场幅值效果图。 关键词:时域有限差分完全匹配层MATLAB 磁场幅值效果图
目录 摘要 (1) 目录 (3) 第一章绪论 (4) 1.1 课题背景与意义 (4) 1.2 时域有限差分法的发展与应用 (4) 2.1 Maxwell方程和Yee氏算法 (7) 2.2 FDTD的基本差分方程 (9) 2.3 时域有限差分法相关技术 (11) 2.3.1 数值稳定性问题 (11) 2.3.2 数值色散 (12) 2.3.3 离散网格的确定 (13) 2.4 吸收边界条件 (13) 2.4.1 一阶和二阶近似吸收边界条件 (14) 2.4.2 二维棱边及角顶点的处理 (17) 2.4.3 完全匹配层 (19) 2.5 FDTD计算所需时间步的估计 (23) 第三章MATLAB的仿真的程序及模拟 (25) 3.1 MATLAB程序及相应说明 (25) 3.2 出图及结果 (28) 3.2.1程序部分 (28) 3.2.2 所出的效果图 (29) 第四章结论 (31) 参考文献 (32)
PID控制算法的matlab仿真.doc
PID 控制算法的 matlab 仿真 PID 控制算法是实际工业控制中应用最为广泛的控制算法,它具有控制器设 计简单,控制效果好等优点。 PID 控制器参数的设置是否合适对其控制效果具有很 大的影响,在本课程设计中一具有较大惯性时间常数和纯滞后的一阶惯性环节作为 被控对象的模型对 PID 控制算法进行研究。被控对象的传递函数如下: G(s) Ke d s 1 T f s 其中各参数分别为 K 30, T f 630, d 60 。MATLAB仿真框图如图1所示。 -K- Kp z 30 -K- (z-1) 630s+1 Step Ki Zero-Order Transport Transfer Fcn Hold Delay Add (z-1) -K- z Kd 图 1 2具体内容及实现功能 2.1 PID 参数整定 PID 控制器的控制参数对其控制效果起着决定性的作用,合理设置控制参 数是取得较好的控制效果的先决条件。常用的 PID 参数整定方法有理论整定法和实 验整定法两类,其中常用的实验整定法由扩充临界比例度法、试凑法等。在此处选用扩充临界比例度法对 PID 进行整定,其过程如下: 1)选择采样周期由于被控对象中含有纯滞后,且其滞后时间常数为 d60 ,故可选择采样周期 T s 1。 2)令积分时间常数T i,微分时间常数T d0 ,从小到大调节比例系数K , 使得系统发生等幅震荡,记下此时的比例系数K k和振荡周期 T k。 1 Out1 3)选择控制度为Q 1.05 ,按下面公式计算各参数:
K p 0.63K k T i 0.49T k T d 0.14T k T s 0.014T k 通过仿真可得在 T s 1时, K k 0.567, T k 233 ,故可得: K p 0.357, T i 114.17, T d 32.62,T s 3.262 K p T s 0.005 K i T i K p T d 3.57 K d T s 按此组控制参数得到的系统阶跃响应曲线如图 2 所示。 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 01002003004005006007008009001000 图 2 由响应曲线可知,此时系统虽然稳定,但是暂态性能较差,超调量过大,且响应曲线不平滑。根据以下原则对控制器参数进行调整以改善系统的暂态过程: 1)通过减小采样周期,使响应曲线平滑。 2)减小采样周期后,通过增大积分时间常数来保证系统稳定。 3)减小比例系数和微分时间常数,以减小系统的超调。 改变控制器参数后得到系统的阶跃响应曲线如图3 所示,系统的暂态性能得到明显改善 .
matlab电路仿真
Matlab电路仿真软件包-simpowersystems 1.入门 1.1.SymPowerSystem是什么 1.1.1.介绍 在Matlab提供的simulink仿真环境下,与其他建模产品结合在一起,用于对电子、机械系统进行建模。要学会使用SymPowerSystem,应首先学会使用Simulink仿真。1.1.2.设计中的仿真的作用(略) 1.1.3.SymPowerSystem仿真库 你可迅速将SymPowerSystem投入使用。该库包含了许多典型的功率设备模型,例如,变压器、导线、机械、能源电子等。这些仿真模型来源于产品手册,基于工程实际。 SymPowerSystem包含一个主要的库:powerlib。powerlib库显示了所有包含的模块和模块名称。 1.1.4.SymPowerSystem中的非线性模块(略) 1.1.5.仿真时需要的环境: Maltab 和Simulink
1.2.如何使用该指南 1.2.1.对于新用户 将学会如下知识和技能: (1)使用该库创建和仿真电子电路模型 (2)将一个电子电路于simulink模块连接在一起 (3)分析电子电路的稳定状态和频率响应 (4)离散化模型,以便加快仿真速度 (5)使用矢量图仿真方法 (6)构建自定义的非线性仿真模型 1.2.2.对于经验丰富的模块用户(略) 1.2.3.所有用户(略) 1.3.创建和仿真简单的电路 1.3.1.介绍 SymPowerSystem允许你对包含线性或非线性的电子电路进行建模和仿真。在本章节中,您将学习到: (1)浏览SymPowerSystems的powerlib库 (2)如何利用SymPowerSystem创建一个简单的电路 (3)如何将电路与simulink模块互联。 下述电路是即将创建的电路:
MATLAB电路仿真实例
题14.14 图(a)所示电路,已知 V )2cos(15S t u =二端口网络阻抗参数矩阵 Ω?? ????=46j 6j 10Z 求ab 端戴维南等效电路并计算电压o u 。 u -+o u 图题14.14 (一)手动求解: 将网络N 用T 型电路等效,如图(b)所示 S U +-o U 等效阻抗 Ω=-+-?+ -=4.6j615j6j6)15(6j 6j 4i Z 开路电压 V 2j302 15j6j6105j6OC =?∠?+-+=U V 1482 18.3j46.42j3j4j4Z j4OC o ?∠=+?=?+=U U i
所以 )1482cos(18.3o ?+=t u V (二)Matlab 仿真: ⒈分析:本次仿真需输入各阻抗Zl 、Z1、Z2、Z3、Z4以及激励源Us 的参数值,仿真结果需输出开路电压Uoc 、等效阻抗Zi 以及电感两端电压U0的幅值和相位信息,并绘制Uoc ,U0的值随时间变化的波形曲线。其中各元件与原图的对应关系如下图所示: ⒉编辑M 文件的源程序如下: clear %清空自定义变量 z1=4-6j;z2=6j;z3=10-6j;z4=5;us=15*exp(j*0);zl=4j;%输入各元件参数 zi=z1+(z2*(z3+z4)/(z2+z3+z4));%等效阻抗zi 的计算表达式uoc=us*z2/(z2+z3+z4);%开路电压uoc 的计算表达式u0=zl/(zi+zl)*uoc;%电感两端电压uo 的计算表达式disp('The magnitude of zi is'); %在屏幕上显示“The magnitude of zi is ”disp(abs(zi)) %显示等效阻抗zi 的模disp('The phase of zi is'); %在屏幕上显示“The phase of zi is ”disp(angle(zi)*180/pi)%显示等效阻抗zi 的辐角 disp('The magnitude of uoc is'); %在屏幕上显示“The magnitude of uoc is ” disp(abs(uoc))%显示开路电压uoc 的模
MATLAB定点仿真方法的学习笔记
定点仿真方法的学习笔记(一) 在用MATLAB工具对算法进行仿真时,数据的流动是以浮点形式进行的,浮点型又分单 单精度浮点型数据用32 bit 来存储数据,其中符号位1 bit,指数位8 bit,尾数位23 bit。双精度浮点型数据则用64 bit 来存储数据,其中符号位1 bit,指数位11 bit,尾数位52 bit。 这样的数据存储方式能够保证一个数的精度。但是在考虑硬件实现的时候(如FPGA,定点DSP),数据的流动是以固定长度的二进制序列进行,因此,为了进一步的反映硬件实现中算法性能,我们需要对数据的类型做重新的定义,使得所表示的数据更符合硬件平台上的处理方式。 做定点仿真实际就是对算法中的每一个数据进行量化,用规定字长的二进制序列表示一个数,使它接近实际值。为了方便对数据类型做定点转换,MATLAB提供了强大的Fixed-Point Toolbox 来帮助我们做这项工作。以下的所用内容只是个人对Fixed-Point Toolbox 学习的总结,如有任何疑问,请查找HELP 中的相关内容,理解上如有错误,恳请斧正。 先介绍几个对象给大家认识,也就是Object,个人认为定点的过程就是让数据在 fi 这个对象下进行工作。 ●fi 对象 当你用 fi 这个函数对一个数据进行定点处理时,你就构造了一个fi 对象(说白了也是一个数,你规定了这个数的数据类型)。你可以对这个对象进行运算。与一个数不同的是这个对象有很多的属性,在这里先把它们中常用的列出来,并对它们做一些简要说明,后面会用实例告诉大家怎么去理解这些属性。 ?Data 属性 该属性可以让你了解一个fi对象在不同的数据形式下的具体值,如二进制(bin),八进制(oct),十进制(dec),十六进制(hex),双精度(double)等等。 ?fimath 属性 该属性规定了fi 对象在进行数据运算时,处理数据的习惯(数学运算,截位方式,溢出方式)。它是一个比较抽象意义上的属性,你可以用另一个对象对它进行定义。当你要定义fi对象的fimath属性时,你需要先定义一个fimath的对象,再用fimath 对象定义fi对象的fimath属性。将在fimath对象中介绍。 ?numerictype 属性 该属性包含了fi对象的所有数据类型信息。它是一个比较抽象意义上的属性,你可以用另一个对象对它进行定义。当你要定义fi对象的numerictype属性时,你需要先定义一个numerictype对象,再用numerictype对象定义fi对象的fimath属性。将在numerictype对象中介绍。 ●fimath 对象 该对象的常用属性如下: ?CastBeforeSum 属性 在两个操作数进行加法之前,是否将操作数影射成“和”的数据类型。“0”表示“否”,“1”表示“是”。例如,若两个操作数(对象)是18 bit,定义“和”为12 bit,若该属性为“0”,则两个操作数先进行“加”操作,然后对“和”截位得到12 bit输出,若该属性为“1”,则两个操作数先截位成12 bit,然后再进行“加”操作。
matlab电路仿真
SHANDONG UNIVERSITY OF TECHNOLOGY 数学 软件结业 论文 题目: 电路仿真方法研究 学 院: 电气与电子工程学院 专 业: 电气工程及其自动化 学生姓名: 武奥 学 号: 14110302044 指导教师: 周世祥 2015年11 月
目录 摘要 (Ⅰ) 目录 (Ⅲ) 第一章引言 (1) 1.1课题的背景和意义 (1) 1.2深度学习的前世今生 (2) 第二章自编码器模型构建 (4) 2.1入门 (4) 1.1. 2.2 SymPowerSyste是什么5 2.引言 2.1.1.1 课题的背景和意义 随着计算机技术和互联网的发展,人类开始步入大数据时代,我们需要从海量的数据中找到自己感兴趣或者对自己有用的信息,这就要求计算机能在短时间内检索出满意的结果。伴随着搜索引擎的发展我们在文字检索方面已经取得了值得骄傲的成就,但是在更加直观,更加方便的图片检索方面仍然有待发展。试想一下,如果我们能通过图片检索到自己想要的信息我们的生活将会更加便利,我们只要对着自己感兴趣的东西扫一扫就能获得我们需要的信息。 要实现上述目标就要求计算机能像人的视觉系统一样能识别图片、对图片进行分类处理。然而,每幅图片的信息量就很大,要从海量的图片中进行识别处理数据量可想而知,而且并不是图片中的所有信息都是有用的。 -III-
这就需要我们对图片进行降维处理和特征提取。虽然已有的降维方法在理论支持上很成熟,但是基于线性的方法并不适合图像识别而且实际效果也不尽人意。深度学习算法是2006年提出的一种新的方法,虽然缺乏理论支持但在实际应用中取得良好效果。 深度学习算法在计算机视觉、图像识别方面已经开始普遍使用,相对于以前的方法准确率大大提高。除了在图像识别领域,深度学习在语音识别、自然语言处理等方面也有突破性进展:2012年11月,在中国天津举行的“21世纪的计算机大会”上微软公开演示了一个全自动同声传译系统,微软首席研究员的英文演讲被后台的计算机自动识别、翻译、合成并转换成和演讲者音色相近的中文发音,这背后的关键技术就是深度学习算法。深度学习研究的日益成熟和完美应用一定可以给我们的生活带来极大的便利和智能化。 -IV-
Matlab电气仿真
大连海事大学 题目:电气系统的计算机辅助设计 姓名: 学号: 学院:轮机工程学院 专业班级:电气工程及其自动化(4)班 指导老师:郑忠玖王宁 设计任务(一) 一、实验目的: 1、掌握Matlab/Simulink 电气仿真的基本步骤; 2、掌握Matlab/Simulink中SimPowerSystems 工具箱的基本建模方法; 3、利用Matlab/Simulink 在整流电路方面的仿真设计。 二、实验原理: 220V 50HZ交流电源经变压器降压,输出交流24V 50HZ就是交流电。经单相桥式整流电路加LC滤波电路后,由于电感与电容的作用,输出电压与电流无法突变,使输出电压波形在一定的电压附近形成正弦脉动。
三、实验内容: 1、单相桥式整流 (1)设计要求: a)单相桥式整流加LC滤波电路,电源为220V,50Hz; b)整流电路输入为24V; c)负载为10Ω阻性负载; d)滤波电感L=100mH,滤波电容C=200uF; (2)设计电路图: (3)仿真结果波形图:
time v o l t a g e /c u r r e n t 单项桥式整流加LC 滤波电路VT3输出波形 00.0050.010.0150.020.025 0.030.0350.040.0450.05-35-30 -25 -20 -15-10-5 5 time v o l t a g e /c u r r e n t 单项桥式整流加LC 滤波电路VT4输出 (4) 仿真结果分析: 1. 在变压器输出正弦波的正半周期,二极管VT1与二极管VT4导通, 二极管VT2与二极管VT3被施以反压而截止; 在变压器输出正弦波 time v o l t a g e 单相桥式整流加LC 滤波电路输出波形
实验一--典型环节的MATLAB仿真
实验一 典型环节的M A T L A B 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、SIMULINK 的使用 MATLAB 中SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。利用SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。 1.运行MATLAB 软件,在命令窗口栏“>>”提示符下键入simulink 命令,按Enter 键或 在工具栏单击按钮,即可进入如图1-1所示的SIMULINK 仿真环境下。 2.选择File 菜单下New 下的Model 命令,新建一个simulink 仿真环境常规模板。 3.在simulink 仿真环境下,创建所需要的系统 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G 实验处理:1)(1=s G SIMULINK 仿真模型 波形图为: 实验处理:2)(1=s G SIMULINK 仿真模型 波形图为: 实验结果分析:增加比例函数环节以后,系统的输出型号将输入信号成倍数放大. ② 惯性环节11)(1+= s s G 和1 5.01)(2+=s s G 实验处理:11)(1+=s s G
SIMULINK 仿真模型 波形图为: 实验处理:1 5.01)(2+=s s G SIMULINK 仿真模型 波形图为: 实验结果分析:当11)(1+=s s G 时,系统达到稳定需要时间接近5s,当1 5.01)(2+=s s G 时,行动达到稳定需要时间为2.5s,由此可得,惯性环节可以调节系统达到稳定所需时间,可以通过惯性环节,调节系统达到稳定输出的时间。 ③ 积分环节s s G 1)(1= 实验处理: SIMULINK 仿真模型 实物图为: 实验结果分析:由以上波形可以的出,当系统加入积分环节以后,系统的输出量随时间的变化成正比例增加。 ④ 微分环节s s G =)(1 实验处理: SIMULINK 仿真模型 波形图为: 实验结果分析:微分环节,是将系统的输入对时间的倒数作为输出,当输入为阶跃信号时,加入微分环节后,输入变为0。 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G 实验处理:2)(1+=s s G SIMULINK 仿真模型 波形图为: