一体化动态倒车轨迹视像生成方法及系统(二撰9-15)剖析
本发明公开了一种一体化动态倒车轨迹视像生成方法及系统,通过以下步骤实现倒车轨迹视像的生成:预存车辆倒车轨迹线图片;获取车辆的车身位置变化信息,其中,所述车身位置变化信息来自于固定设置于车身的惯性传感器,所述惯性传感器包括三轴加速度计、三轴陀螺仪和三轴磁强计;调取与所述车身位置变化信息对应的预存车辆倒车轨迹线图片,并将其叠加显示于显示器上,其中,所述显示器显示的图像为设置于车辆后方的摄像头采集的图像信息。该一体化动态倒车轨迹视像生成方法及系统安装方便,不依赖车身自带的软件,适用于所有车型。
S1
1、一种一体化动态倒车轨迹视像生成方法,包括如下步骤:
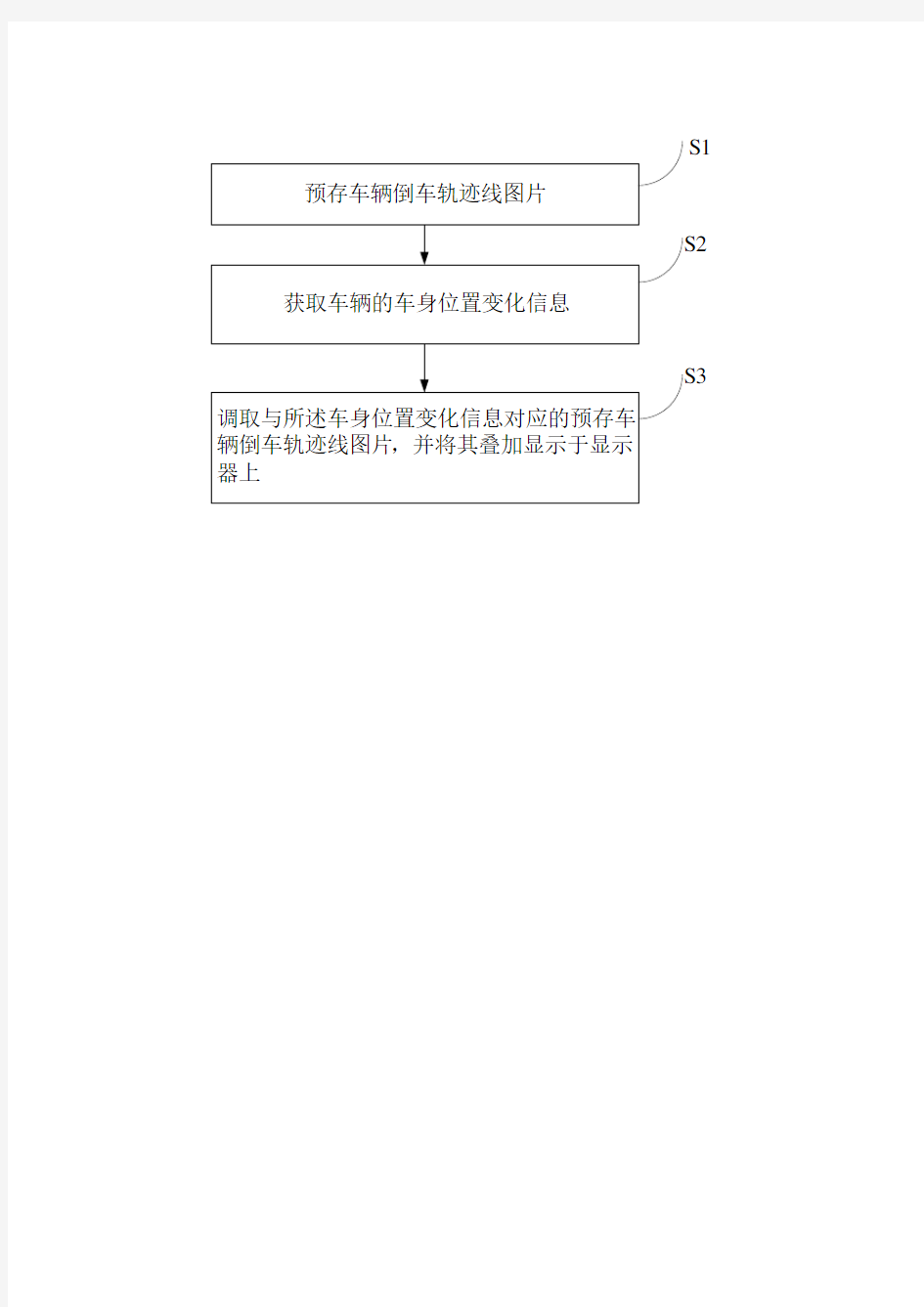
S1:预存车辆倒车轨迹线图片;
S2:获取车辆的车身位置变化信息,其中,所述车身位置变化信息来自于固定设置于车身的惯性传感器,所述惯性传感器包括三轴加速度计、三轴陀螺仪和三轴磁强计;
S3:调取与所述车身位置变化信息对应的预存车辆倒车轨迹线图片,并将其叠加显示于显示器上,其中,所述显示器显示的图像为设置于车辆后方的摄像头采集的图像信息。
2、按照权利要求1所述一体化动态倒车轨迹视像生成方法,其特征在于:所述步骤S2具体包括如下步骤:
S201:通过三轴加速度计、三轴陀螺仪和三轴磁强计获得车辆的三轴加速度信息、三轴角速度信息及三轴地磁信息;
S202:根据所述三轴加速度信息、三轴角速度信息及三轴地磁信息计算出车辆的位置变化信息。
3、按照权利要求2所述一体化动态倒车轨迹视像生成方法,其特征在于:所述步骤S3具体包括如下步骤:
S301:预设车身位置变化触发值;
S302:检测车身位置变化量是否等于预设的车身位置变化触发值,若是,将与车身位置变化量对应的预存车辆倒车轨迹线图片叠加显示于显示器上,并将此时的车身位置信息作为下一次车体运行轨迹变化的参考值,重复此步骤,直至结束生成视像。
4、按照权利要求3所述一体化动态倒车轨迹视像生成方法,其特征在
于:预存的车辆倒车轨迹线图片中,每两张轨迹线的曲率最接近的车辆倒车轨迹线图片对应的车身位置变化值为一定值,所述车身位置变化触发值可通过输入单元更新,且输入的值为其上的轨迹线的曲率最接近的任意两张预存的车辆倒车轨迹线图片对应的车身位置变化值的整数倍。
5、按照权利要求1至4中任一项所述一体化动态倒车轨迹视像生成方法,其特征在于:所述预存的车辆倒车轨迹线图片可通过串口更新。
6、一种一体化动态倒车轨迹视像生成系统,其特征在于,包括:摄
像头(1)、三轴加速度计(21)、三轴陀螺仪(22)、三轴磁强计(23)、第一存储单元(3)、显示器(4)和控制器(5),其中,所述控制器(5)分别与所述摄像头(1)、三轴加速度计(21)、三轴陀螺仪(22)、三轴磁强计(23)、第一存储单元(3)和显示器(4)相连,所述第一存储单元(3)用于存储车辆倒车轨迹线图片。
7、按照权利要求6所述一体化动态倒车轨迹视像生成系统,其特征在于:还包括数据处理单元(6),所述数据处理单元(6)与控制器(5)连接。
8、按照权利要求6所述一体化动态倒车轨迹视像生成系统,其特征在于:还包括存储车身位置变化触发值的第二存储单元(7)和用于存储当前车身位置信息的第三存储单元(8),当检测到车身位置变化值等于第二存储单元(7)中的预设值时,控制器(5)将与所述车身位置变化值对应的车辆倒车轨迹线图片叠加显示于显示器(4),同时,将当前的车身位置信息存储到第三存储单元中(8)。
9、按照权利要求8所述一体化动态倒车轨迹视像生成系统,其特征在
于:所述第一存储单元(3)中每两张轨迹线的曲率最接近的车辆倒车轨迹线图片对应的车身位置变化值为一定值,所述一体化动态倒车轨迹视像生成系统还包括与所述控制器(5)连接的输入单元(9),所述输入单元(5)用于更新所述第二存储单元(7)中存储的车身位置变化触发值,其中,所述输入的触发值为所述第一存储单元(3)中轨迹线的曲率最接近的任意两张车辆倒车轨迹线图片对应的车身位置变化值的整数倍。
10、按照权利要求6至9中任一项所述一体化动态倒车轨迹视像生成系统,其特征在于:还包括与所述控制器(4)连接的图片更新单元(10),用于更新所述第一存储单元(3)中存储的车辆倒车轨迹线图片。