齿轮系

第八章 齿 轮 系
§8—1 齿轮系的分类
在复杂的现代机械中,为了满足各种不同的需要,常常采用一系列齿轮组成的传动系统。这种由一系列相互啮合的齿轮(蜗杆、蜗轮)组成的传动系统即齿轮系。本章主要讨论齿轮系的常见类型、不同类型齿轮系传动比的计算方法。
齿轮系可以分为两种基本类型:定轴齿轮系和行星齿轮系。 一、定轴齿轮系
在传动时所有齿轮的回转轴线固定不变齿轮系,称为定轴齿轮系。定轴齿轮系是最基本的齿轮系,应用很广。如下图所示。
二、行星齿轮系
若有一个或一个以上的齿轮除绕自身轴线自转外,其轴线又绕另一个轴线转动的轮系称为行星齿轮系,如下图所示。
1. 行星轮——轴线活动的齿轮.
2. 系杆 (行星架、转臂) H .
3. 中心轮 —与系杆同轴线、 与行星轮相啮合、轴线固定的齿轮
4. 主轴线 —系杆和中心轮所在轴线.
5. 基本构件—主轴线上直接承受
载荷的构件.
行星齿轮系中,既绕自身轴线自转又绕另一固定轴线(轴线O1)公转的齿轮2形象的称为行星轮。支承行星轮作自转并带动行星轮作公转的构件H 称为行星架。轴线固定的齿轮1、3则称为中心轮或太阳轮。因此行星齿轮系是由中心轮、行星架和行星轮三种基本构件组成。显然,行星齿轮系中行星架与两中心轮的几何轴线(O1-O3-OH )必须重合。否则无法运动。
根据结构复杂程度不同,行星齿轮系可分为以下三类:
(1)单级行星齿轮系: 它是由一级行星齿轮传动机构构成的轮系。一个行星架及和其上的行星轮及与之啮合的中心轮组成。
(2)多级行星齿轮系:它是由两级或两级以上同类单级行星齿轮传动机构构成的轮系。 (3)组合行星齿轮系:它是由一级或多级以上行星齿轮系与定轴齿轮系组成的轮系。 行星齿轮系 根据自由度的不同。可分为两类:
1450rpm 53.7rpm
(1) 自由度为2 的称差动齿轮系。
(2) 自由度为1 的称单级行星齿轮系。按中心轮的个数不同又分为:
2K —H 型行星齿轮系;3K 型行星齿轮系;K —H —V 型行星齿轮系。
§8—2 定轴齿轮系传动比的计算
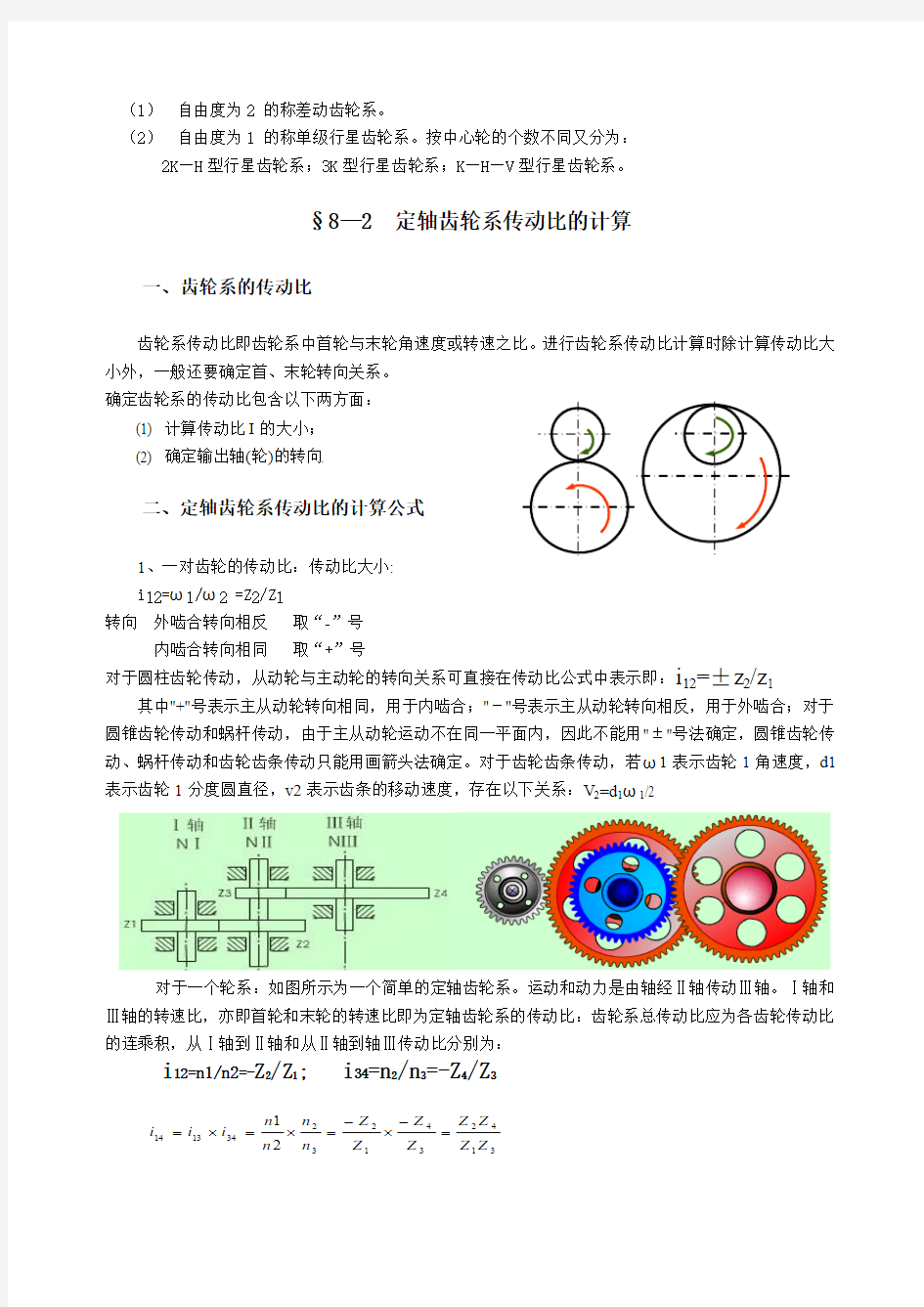
一、齿轮系的传动比
齿轮系传动比即齿轮系中首轮与末轮角速度或转速之比。进行齿轮系传动比计算时除计算传动比大小外,一般还要确定首、末轮转向关系。 确定齿轮系的传动比包含以下两方面:
(1) 计算传动比I 的大小; (2) 确定输出轴(轮)的转向.
二、定轴齿轮系传动比的计算公式
1、一对齿轮的传动比:传动比大小: i 12=ω1/ω2 =Z 2/Z 1
转向 外啮合转向相反 取“-”号
内啮合转向相同 取“+”号
对于圆柱齿轮传动,从动轮与主动轮的转向关系可直接在传动比公式中表示即:i 12=±z 2/z 1
其中"+"号表示主从动轮转向相同,用于内啮合;"-"号表示主从动轮转向相反,用于外啮合;对于圆锥齿轮传动和蜗杆传动,由于主从动轮运动不在同一平面内,因此不能用"±"号法确定,圆锥齿轮传动、蜗杆传动和齿轮齿条传动只能用画箭头法确定。对于齿轮齿条传动,若ω1表示齿轮1角速度,d1表示齿轮1分度圆直径,v2表示齿条的移动速度,存在以下关系:V 2=d 1ω1/2
对于一个轮系:如图所示为一个简单的定轴齿轮系。运动和动力是由轴经Ⅱ轴传动Ⅲ轴。Ⅰ轴和
Ⅲ轴的转速比,亦即首轮和末轮的转速比即为定轴齿轮系的传动比:齿轮系总传动比应为各齿轮传动比的连乘积,从Ⅰ轴到Ⅱ轴和从Ⅱ轴到轴Ⅲ传动比分别为:
i 12=n1/n2=-Z 2/Z 1; i 34=n 2/n 3=-Z 4/Z 3
3
1423
41
23
23413142
1Z Z Z Z Z Z Z Z n n n n i i i =-?-=?=?=
定轴齿轮系传动比,在数值上等于组成该定轴齿轮系的各对啮合齿轮传动的连乘积,也等于首末轮之间各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比。 设定轴齿轮系首轮为1轮、末轮为K 轮,定轴齿轮系传动比公式为:
i =n1/nk=各对齿轮传动比的连乘积
i 1k=(-1)M 所有从动轮齿数的连乘积/所有主动轮齿数的连乘积
式中:"1"表示首轮,"K"表示末轮,m 表示轮系中外啮合齿轮的对数。当m 为奇数时传动比为负,表示首末轮转向相反;当m 为偶数时传动比为负,表示首末轮转向相同。
注意:中介轮(惰轮)不影响传动比的大小,但改变了从动轮的转向。
例题8-1 如图所示齿轮系,蜗杆的头数z1=1,右旋;蜗轮的齿 数z2=26。一对圆锥齿轮z3=20,z4=21。一对圆柱齿 轮z5=21,z6=28。若蜗杆为主动轮,其转速n1=1500 r/min ,试求齿轮6的转速n6的大小和转向。 解 :根据定轴齿轮系传动比公式:
4.3621
2012821265
316426
116=????=
=
=
z z z z z z n n i
转向如图中箭头所示。
例题8-2 如图所示定轴齿轮系,已知z1=20,z2=30,z'2=20,z3=60,z'3=20,z4=20,z5=30,n1=100r/min 。逆时针方向转动。求末轮的转速和转向。
解:根据定轴齿轮系传动比公式,并考虑1到5间有3对外啮合,故
末轮
5的转速
8.1475
.610015
15-=-=
=i n n (r/min)
负号表示末轮5的转向与1首轮相反,顺时针转动。
§8—3 行星齿轮系传动比的计算
一、 单级行星齿轮系传动比的计算
对于行星轮系,其传动比的计算,肯定不能直接用定轴齿轮系传动比的计算公式来计算,这是因为行星轮的轴线在转动。
为了利用定轴齿轮系传动比的计算公式,间接计算行星齿轮系的传动比,必须采用转化机构法。即假设给整个齿轮系加上一个与行星架H 的转速大小相等,转向相反的附加转速“—n H ”。根据相对性原理,此时整个行星轮系中各构件间的相对运动关系不变。但这时行星轮架转速为零。即原来运动的行星轮架转化为静止。这样原来的行星齿轮系就转化为一个假象的定轴轮系。这个假象的定轴轮系称原行星轮系的转化机构。对于这个转化机构的传动比,则可以按定轴齿轮系传动比的计算公式进行计算。从而也可以间接求出行星齿轮系传动比。
转化轮系:给整个机构加上-n H 使行星架静止不动n H =0,各构件之间相对运动关系不变,这个转换轮系是个假想的定轴轮系。
行星轮系的组成 太阳轮:齿轮1、3 行星轮:齿轮2
行星架:构件H
行星轮系的传动比计算
构件 原转速 相对转速 中心轮1 n 1 n 1=n 1-n H 行星轮2 n 2 n 2=n 2-n H 中心轮3 n 3 n 3=n 3-n H 行星架H n H n H =n H -n H =0
转化轮系为定轴轮系
1
3313
1
13
z z n n n n n n i H
H H
H H
-
=--=
=
“-”在转化轮系中齿轮1、3转向相反。 一般公式:
/
3
/
215323
5
1)
1(Z Z Z Z Z Z n n i -==
所有主动轮齿数乘积
至从所有从动轮齿数乘积至从K G K G n n n n n
n i m
H
K H G H K
H
G H
GK
)
1(-=--=
=
式中:m 为齿轮G 至K 转之间外啮合的次数。 (1)主动轮G ,从动轮K ,按顺序排队主从关系。
(2)公式只用于齿轮G 、K 和行星架H 的轴线在一条直线上的场合。
(3)n G 、n K 、n H 三个量中需给定两个;并且需假定某一转向为正相反方向用负值代入计算。
例8—3:如图所示的行星轮系中已知电机转速n 1=300r/min (顺时针转动) 当z 1=17,z 3 =85,求当n 3=0和n 3=120r/min (顺时针转动)时的n H 。 解:
例8—4.行星齿轮系如图所示, 已知各齿轮的齿数分别为: Z 1 = 15,Z 2 = 25, Z 2’ = 20 Z 3 = 60, n 1=200 rpm , n 3=50 rpm , 且转向图示。求:系杆的转速n H 的大小和转向?
解:根据相对转动原理可知:
例题8-5行星齿轮系如图所示, 已知各齿轮的齿数分别为: 且齿数Z a = Z b ;转速n a 、n H 也知道。求:B 轮的转速n b=? 解: 根据相对转动原理可列出方程:
min
/505
17
85120300min /505
17
853001331r n n n r n n n z z n n n n H H
H H H
H
H
H -=-=-
=---=-=-
=---
=-
-'
21323113
z z z z n n n n i
H
H H ??-
=--=
20
156********??-
=---H
H n n rpm
n H 33.8-
= a
c a
b
c 1
-=-
=--=
a
b H
b H a H
ab z z n n n n i H b a n n n 2=+a
H b n n n -=2H
c H a H
ac n n n n i --=
二、多级行星齿轮系传动比的计算
多级行星齿轮系传动比是建立在各单级行星齿轮传动比基础上的。其具体方法是:把整个齿轮系分解为几个单级行星齿轮系,然后分别列出各单级行星齿轮系转化机构的传动比计算式,最后再根据相应的关系联立求解。
划分单级行星齿轮系的方法是:
(1) 找出行星轮和相应的系杆(行星轮的支架); (2) 找出和行星齿轮相啮合的太阳轮
(3) 由行星轮、太阳轮、系杆和机架组成的就是单级行星齿轮系。 (4) 列出各自独立的转化机构的传动比方程,进行求解。
在多级行星齿轮系中,划分出一个单级行星齿轮系后,其余部分可按上述方法继续划分,直至划分完毕为之。
三、组合行星齿轮系传动比的计算
在实际应用中,有的轮系既包含定轴轮系又包含行星齿轮系。则形成组合轮系。
计算混合轮系传动比一般步骤如下:
1、 区别轮系中的定轴轮系部分和行星齿轮系部分。
2、 分别列出定轴轮系部分和行星齿轮系部分的传动比公式,并代入已知数据。
3、 找出定轴轮系部分与行星齿轮系部分之间的运动关系,并联立求解即可求出组合轮系中两轮之间的传动比。 如图所示的组合行星齿轮系
分解为由由齿轮Z1、Z2组成的定轴轮系1-2 由齿轮 Z2/、Z3、Z4组成的行星轮系2′-3-4-H 组成例题8—7如图所示的扬机机构中已知各齿轮的齿数为:
Z1=24, Z2=48, Z2/=30, Z3=90, Z3/=20, Z4=40, Z5=100。求传动比i 1H 。若电动机的转速n1=1450r/min ,其卷筒的转速n H 为多少。 解:首先把齿轮系进行分解; (1) 定轴轮系3’-4-5 (2) 行星轮系1-2-2’-3-H 由定轴轮系可得:
由行星轮系可得:补充方程
'
355
'3z z -
=ωω3'3ωω=5
ωω=H
其余联立方程求解即可。
§8—4齿轮系的功用
齿轮系的应用十分广泛,主要有以下几个方面: 1 实现相距较远的传动
当两轴中心距较大时,若仅用一对齿轮传动,两齿轮的尺寸较大,结构很不紧凑。若改用定轴轮系传动,则缩小传动装置所占空间。
2 获得大传动比
K-H-V 型行星齿轮传动,用很少的齿轮可以达到很大的传动比; 3 实现变速换向和分路传动
所谓变速和换向,是指主动轴转速不变时,利用轮系使从动轴获得多种工作速度,并能方便地在传动过程中改变速度的方向,以适应工件条件的变化。
所谓分路传动,是指主动轴转速一定时,利用轮系将主动轴的一种转速同时传到几根从动轴上,获得所需的各种转速。
(1) 变速
(2) 换向:在主动轴转向不变的情况下,利用惰轮可以改变从动轮的转向。
如左图所示为车床上走刀丝杠的三星轮换向机构,扳动手柄可实现两种传动方案。
4 运动的合成与分解
具有两个自由度的行星齿轮系可以用作实现运动的合成和分解。即将两个输入运动合成为一个输出运动,或将一个输入运动分解两个输出运动。
差动轮系能将两个独立的运动合成为一个运动。在一定的条件下,还可以将一主动件的运动按所需比例分解为另外两个从动件的运动。图示汽车后桥差速器是利用差动轮系分解运动的实例。发动机通过传动轴驱动齿轮5,齿轮4上固联着转臂H ,转臂上的装有行星轮2。在该轮系中,齿轮1、2、3和转臂H (亦即齿轮4)组成一个差动轮系。当汽车在平坦道路直线行驶时,两后车轮所滚过的路程相同,故两车轮的转速也相同,即n1= n3。这时的运动由齿轮5传给齿轮4,而齿轮1、2、3和4如同一个固联的整体随齿轮4一起转动,行星轮2
不绕自身轴线回转。当汽车转弯时,例如左转弯,左轮走的是小圆弧,右轮走的是大圆弧,为使车轮和路面间不发生滑动,以减轻轮胎的磨损,要
求右轮比左轮转的快些,即转弯时两轮应具有不同的半径。这时齿轮1和齿轮3之间便发生相对转动,
'
213231z z z z H
H -
=--ωωω
ω
齿轮2除随齿轮4绕后车轮轴线公转外,还绕自身轴线自转,即差动轮系开始发挥作用,故有当车身绕瞬时转心C转动时,左右两车轮
走过的弧长与它们至C点的距离成正比,
即
汽车后桥差速器(牙包)汽车直行:n b = 2n H - n a Array即: n a + n b = 2n H
∵ n a = n b ,
∴ n a = n b= n H
汽车右拐弯f=弧长/半径
d左n a d右n b
=
R+l R–l
na/nb=(r+l)/(r-l)
差动轮系广泛应用于飞机、汽车、船舶、农机和起重机以及其他机械的动力传动中。
*§8—5几种特殊的行星传动简介
(略)
本章小结
(1)本章介绍了轮系的分类和应用,通过学习要掌握定轴轮系、周转轮系以及混合轮系的传动比的计算方法和转向的确定方法。
(2)学习的重点是轮系的传动比计算和转向的判定。在运用反转法计算周转轮系的传动比时,应十分注意转化轮系传动比计算式中的转向正负号的确定,并区分行星轮系和差动轮系的传动比计算的特点。
(3)混合轮系传动比计算的要点是如何正确划分出各个基本轮系,划分的关键是先找出轮系中的周转轮系部分。
返回目录
第4章齿轮习题答案
习 题(答案) 1.选择题 1)一般开式齿轮传动的主要失效形式是 3 。 (1)齿面胶合 (2)齿面疲劳点蚀 (3)齿面磨损或轮齿疲劳折断 (4)轮齿塑性变形 2)高速重载齿轮传动,当润滑不良时,最可能出现的失效形式是 1 。 (1)齿面胶合 (2)齿面疲劳点蚀 (3)齿面磨损 (4)轮齿疲劳折断 3)材料为45钢齿轮,经调质处理后其硬度值约为 2 。 (1)(45~50)HRC (2)(220~270)HBW (3)(160~180 )HBW (4)(320~350)HBW 4)齿面硬度为(56~62)HRC 的合金钢齿轮的加工工艺过程为 3 。 (1)齿坯加工、淬火、磨齿、滚齿 (2)齿坯加工、淬火、滚齿、磨齿 (3)齿坯加工、滚齿、渗碳淬火、磨齿 (4)齿坯加工、滚齿、磨齿、淬火 5)齿轮传动中齿面的非扩展性点蚀一般出现在 2 。 (1)跑合阶段 (2)稳定性磨损阶段 (3)剧烈磨损阶段 (4)齿面磨料磨损阶段 6)对于开式齿轮传动,在工程设计中,一般 4 。 (1)按接触强度设计齿轮尺寸,再校核弯曲强度 (2)按弯曲强度设计齿轮尺寸,再校核接触强度 (3)只需按接触强度设计 (4)只需按弯曲强度设计 7)一对标准直齿圆柱齿轮,已知1z =18,2z =72,则这对齿轮的接触应力 3 。 (1)H2H1σσ> (2)H2H1σσ< (3)H2H1σσ= (4)H2H1σσ≤ 8)一对标准渐开线圆柱齿轮要正确啮合时,它们的 2 必须相等。 (1)直径 (2)模数 (3)齿宽 (4)齿数 9)设计闭式硬齿面齿轮传动时,若直径一定,则应取较少齿数,使模数增大以 2 。 (1)提高齿面接触强度 (2)提高齿根弯曲疲劳强度 (3)减少加工切削量,提高生产率 (4)提高抗塑性变形能力 10)在直齿圆柱齿轮设计中,若中心距保持不变,而把模数增大,则可以 2 。 (1)提高齿面接触强度 (2)提高轮齿的弯曲强度 (3)弯曲与接触强度均可提高 (4)弯曲与接触强度均不变 11)当 4 ,则齿根弯曲强度增大。 (1)模数不变,增多齿数 (2)模数不变,减小中心距 (3)模数不变,增大直径 (4)齿数不变,增大模数 12)轮齿弯曲强度计算中齿形系数与 3 无关。 (1)齿数 (2)变位系数 (3)模数 (4)斜齿轮的螺旋角 13)齿轮传动在以下几种工况中 3 的齿宽系数可取大些。 (1)悬臂布置 (2)不对称布置 (3)对称布置 (4)同轴式减速器布置
机械原理答案第十一章齿轮系及其设计
第十一章 齿轮系及其设计 题11-1如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比i 15,并指出当提升重物时手柄的转向(在图中 用箭头标出)。 解: 此轮系为空间定轴轮系 78 .57718115205240305043215 43215=??????= =' ''z z z z z z z z i 题11-2如图所示为一滚齿机工作台传动机构,工作台与涡轮5固联。若已知z 1=z 1′=15,z 2=35,z 4′=1(右旋),z 5=40,滚刀z 6=1(左旋),z 7=28。今要切制一个齿数z 5′=64的齿轮,应如何选配挂轮组的齿数z 2′、z 3和z 4。 解:由范成原理,滚刀6与轮坯5’的角速度比应为646 55656===' ''z z i ωω 转向如图。 这一角速度比由滚齿机工作台的传动系统来保证。 5624 2442175421155011528403515'' ''''=?=?????==i z z z z z z z z z z z z i 转向如图 可求得 25 3252=z z 至于Z 3为惰轮,其齿数可根据中心距A 24的需要确定。
2 3 4 5 6 7 1′ 4′5′ 1 题11-2 题11-3 如图所示为一千分表的示意图。己知各轮齿数如图,模数mm m 11.0=(为非标准模数)。若要测量杆1每移动mm 001.0时,指针尖端刚好移动一个刻度()mm s 5.1=。问指针的长度?=R (图中齿轮5和游丝的作用是使各工作齿轮始终保持单侧接触,以消除齿轮间隙对测量精度的影响) 解:()4332-'-组成定轴轮系 100 1160120121632431224=??===''z z z z i ?? 24100??=∴ 再由轮2与测量杆组成齿轮与齿条传动知 测杆1每移动mm 001.0时,齿轮2的转角为: 42221027.611 .029001 .022-?=??=== m Z h r h ? 此时要求指针刚好移动一刻度()mm s 5.1=,由4?R s =可得指针的长度为 mm s s R 241027.61005 .11004 24 =??== = -?? 题11-4 如图所示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端装被绕制线圈。2、3为两个窄蜗轮, z 2=99,z 3=100。在计数器中有两个刻度盘,在固定刻度盘的一周上有100个刻度,在与蜗轮2固联
齿轮机构及其设计(全部习题参考答案)
第5章 齿轮机构及其设计 5.1 已知一对外啮合正常齿标准直齿圆柱齿轮123, 1941m mm z ===,z ,试计算这对齿轮的分度圆直径、齿顶高、齿根高、顶隙、中心距、齿顶圆直径、齿根圆直径,基圆直径、齿距、齿厚和齿槽宽。 解: ()1212121219357,413123133,1.253 3.753.7530.75,0.55712390572363, 12323129572 3.7549.5,1232 3.75115.557cos2053.563,123cos20a f a a f f b b d mm d mm h mm h mm c mm a mm d mm d mm d mm d mm d mm d =?==?==?==?====?+==+?==+?==?==?==??==??=---115.58339.425mm p ==mm π 5.2 已知一正常齿标准直齿圆柱齿轮20,540m mm z α=?==,,试分别求出分度圆、基圆、齿顶圆上渐开线齿廓的曲率半径和压力角。 解:分度圆上:0.554010020sin 100sin 2034.20r mm r mm αρα=??====?=o 基圆上: 100cos2093.9700 b b b r r cos mm ααρ=?=??==? = 齿顶圆上:1 1005105cos (/ )26.5 sin 105sin26.546.85a a b a a a a r mm r r r mm αρα-=+=====?=o 5.4 在某项技术革新中,需要采用一对齿轮传动,其中心距144a mm =,传动比2i =。现在库房中存有四种现成的齿轮,已知它们都是国产的正常齿渐开线标准齿轮,压力角都是20°,这四种齿轮的齿数z 和齿顶圆直径a d 分别为: 1a12a23a34a424,=104mm;47,196mm; 48,250mm; 48,200mm. z d z d z d z d ======= 试分析能否从这四种齿轮中选出符合要求的一对齿轮来。 解:根据传动比要求,显然齿轮2不合适。又
机械设计基础第10章 轮系(课后答案)
第10章 轮系(习题答案) 10.1 解: 1、2-2’、3-3’、4-4’和5组成定轴轮系 200 ' 4'3'2154325 115== = z z z z z z z z n n i mm mz r r n n 402 min /5.2'5'5'55== == s mm v v n r r v /5.1060 26'5' 5'5'5'5=== =π? 10.2 解: 定轴轮系:1、2、3 1313311376 121276n n z z n n i = ?= + ==, 121 22 112521212 52n n z z n n i - =?- =-== 周转轮系:4、5、6和H 49734 66446 - =- =--= z z n n n n i H H H 497376 12 5212 49 731164- =--- ? -=--H H H H n n n n n n n n 因为6342,n n n n ==
所以 558 11+== H H n n i 10.3 解: 3 1 33113 -=- =--= z z n n n n i H H H 因为0 3 =n 所以 4 11+== H H n n i 结论:当手柄转过90°(即 901=?)时, 5 .224 11==??H ,且同向。 10.4 解: 3 2' 21323113 + =+ =--= z z z z n n n n i H H H 把120,12031-==n n 代入上式, 3 212012031= ---= --H H H H n n n n n n 得:min /600r n H +=,方向与1n 相同。
第十章 齿轮机构及其设计要点
第十章齿轮机构及其设计 1 一个齿轮不同圆上的压力角和模数是否相同?是否都是标准值? 2 为什么模数值要标准化? 3 标准为什么规定压力角为20°? 4 如果齿轮的五个基本参数中,除模数以外其余四个基本参数都相同,齿轮的几何尺寸有何不同? 5 确定蜗杆头数和蜗轮的齿数要考虑哪些问题? 6 何谓蜗杆蜗轮机构的中间平面?在中间平面内,蜗杆蜗轮传动相当于什么传动? 7 确定蜗杆直径系数的目的是什么?的大小对蜗杆蜗轮机构有什么影响?它与蜗杆分度圆直径是什么关系? 8 何谓圆锥齿轮的背锥和当量齿轮?引入背锥和当量齿轮的目的是什么?当量齿数如何计算? 9 在直齿圆锥齿轮中何处为标准值? 10 渐开线标准齿轮是指m、α、*a h、*c均为标准值,且分度圆齿厚齿槽宽的齿轮。 11 渐开线直齿圆柱齿轮与齿条啮合时,其啮合角恒等于齿轮上的压力角。 12 用标准齿条型刀具加工标准齿轮时,刀具的线与轮坯的圆之间作纯滚动。 13 一对渐开线圆柱齿轮传动,其圆总是相切并作纯滚动,而两轮的中心距不一定等于两轮的圆半径之和。 14 一对渐开线标准直齿圆柱齿轮按标准中心距安装时,两轮的节圆分别与其圆重合。 15 用同一把刀具加工m、z、α均相同的标准齿轮和变位齿轮,它们的分度圆、基因和齿距均。 16 正变位齿轮与标准齿轮比较其齿顶高,齿根高。 17 要求一对外啮合渐开线直齿圆柱齿轮传动的中心距略小于标准中心距,并保持无侧隙啮合,此时应采用传动。 18 斜齿圆柱齿轮的齿顶高和齿根高,无论从法面或端面来看都是的。 19一对外啮合斜齿圆柱齿轮的正确啮合条件为。 20 蜗杆的标准模数和标准压力角在面,蜗轮的标准模数和标准压力角在面。 21 直齿锥齿轮的几何尺寸通常都以作为基准。 22 渐开线直齿圆柱齿轮正确啮合的条件是: 。 23 一对直齿圆锥齿轮传动的正确啮合条件是。 24蜗杆蜗轮传动的正确啮合条件是。 25标准渐开线直齿圆锥齿轮的标准模数和压力角定义在端。 26一对渐开线直齿圆柱齿轮啮合传动时,两轮的圆总是相切并相互作纯滚动的,而两轮的中心距不一定总等于两轮的圆半径之和。 27 共轭齿廓是指一对的齿廓。 28 用齿条刀具加工标准齿轮时,齿轮分度圆与齿条中线,加工变位齿轮时,中线与分度圆。被加工的齿轮与吃条刀具相"啮合"时,齿轮节圆与分度圆。 29 有两个模数、压力角、齿顶高系数及齿数相等的直齿圆柱齿轮,一个为标准齿轮1,另一个为正变位齿轮2,试比较这两个齿轮的下列尺寸,哪一个较大、较小或相等:d b1d b2; d a1d a2;d1d2;d f1d f2;s a1s a2;s1s2。 30标准齿轮除模数和压力角为标准值外,还应当满足的条件是。 31斜齿轮在上具有标准模数和标准压力角。
第六章-轮系计算题专项训练(附答案)
第六章轮系计算题专项训练(答案) 1、如图所示,已知:z 1=16,z=32,z 2 ,=20,z 3 =40,蜗杆z 3 ,=2,蜗轮z 4 =40,n 1 =8 00r/min。试求蜗轮的转速n 4 并确定各轮的回转方向。 2、在图示轮系中,已知z1、z2、z2'、z3、z4、z4'、z5、z5'、z6。求传动比i16 。 i16=z2z4z5z6/z1z2'z4'z5' 3、图示轮系中蜗杆1为双头左旋蜗杆Z 1 =2,转向如图所示。蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1, 蜗轮3的齿数为Z3=40,其余各轮齿数为Z3’=30, Z4=20, Z4’=26, Z5=18, Z5’=46, Z6=16, Z7=22。求i17。
i17=Z2Z3Z4Z5Z6Z7/Z1Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26*46= 220.7 4、在习题图8所示的轮系中,已知z 1=15 , z 2 =25 , z 2’ =15 , z 3 =30 , z 3’ =15 , z 4=30, z 4’ =2,z 5 =60, 若n 1 =500 r/min,求齿轮5转速的大小和方向。 (n 5 =2.5 r/min , 顺时针)
2002151515603030254534231251=??????=='''z z z z z z z z n n ,)/(5.2200 50020015m r n n ===;齿轮5的方向可以画箭头确定。 5、在图示轮系中,已知z1、z 2、z2'、z3、z 4、 z 4'、 z 5、 z5'、z6。 求传动比 i 16。 ? 6、如图所示轮系,已知122344524,46,23,48,35,20,48z z z z z z z ''=======,1O 为主动轴。试计算轮系的传动比15i 并确定齿轮5的转动方向。
齿轮系及其设计试题
第11章 齿轮系及其设计 I.填空题 1 平面定轴轮系传动比的大小等于 ;从动轮的回转方向可用 方法来确定。 2 所谓定轴轮系是指______,而周转轮系是指_______ 3 在周转轮系中,轴线固定的齿轮称为_____;兼有自转和公转的齿轮称为_____;而这种齿轮的动轴线所在的构件称为_____。 II.判断题 1 定轴轮系的传动比等于各对齿轮传动比的连乘积。( ) 2 周转轮系的传动比等于各对齿轮传动比的连乘积。( ) 3 行星轮系中若系杆为原动件可驱动中心轮,则反之不论什么情况,以中心轮为原动件时也一定可驱动系杆。( ) III.选择题 1 下面给出图示轮系的三个传动比计算式,为正确的。 (A )H H H i ωωωω--= 2112 (B )H H H i ωωωω--= 3113 (C )H H H i ωωωω--= 3223 IV.计算题 1 在图示轮系中,已知:蜗杆为单头且右旋,转速n 11440= r /min ,转动方向如图示,
其余各轮齿数为:z 240?=,z 220'=,z 330=,z 318'=,z 454?=,试: (1)说明轮系属于何种类型;(2)计算齿轮4的转速n 4;(3)在图中标出齿轮4的转动方向。 2 在图示轮系中,所有齿轮均为标准齿轮,又知齿数z 130=,z 468?=。试问: (1)z 2? ?=,z 3=? (2)该轮系属于何种轮系? V.问答题 1 在图示轮系中,根据齿轮1的转动方向,在图上标出蜗轮4的转动方向。
VI.计算题 1 在图示的轮系中,已知各轮齿数为zz z z z 1235620=====,已知齿轮1、4、5、7为 同轴线,试求该轮系的传动比i 17。 2 在图示万能刀具磨床工作台横向微动进给装置中,运动经手柄输入,由丝杆传给工 作台。已知丝杆螺距P=50mm ,且单头。z z 1219==,z 318=,z 420=,试计算手柄 转一周时工作台的进给量s 。
第17章-轮系习题答案
第17章轮系(作业) 1. 由一系列齿轮所组成的传动系统,称为轮系,它一般分为定轴轮系和周转轮系两类。 2. 轮系主要应用在以下几方面:(1) 中心距较大,(2) 大传动比,(3) 变速运动,(4) 改变从动轮转向。 3. 轮系中主动轴与最后一根从动轴的转速之比,称为该轮系的传动比。若用i kl表示,则下标k表示主动轮,l表示从动轮。 4. 计算轮系传动比时,除计算其数值大小,还要判断其转向。首末两轮转向相同为+号,转向相反为-号。 5. 在定轴轮系中,只改变传动比符号而不改变传动比大小的齿轮,称为惰轮。 6. 惰轮的作用有两个:(1)改变转向;(2)增大传动中心距。 7. 在周转轮系中,轴线固定的齿轮称为中心轮,轴线转动的齿轮称为行星轮,而支持行星轮的构件称为系杆。 8. 周转轮系按所需主动件数(或机构自由度数)又可分为行星轮系和差动轮系两类。有两个主动件的周转轮系,称为差动轮系。 9. 周转轮系的传动比可通过转化后的转化轮系求解获得。 10. 少齿差行星齿轮传动的优点是(1) 结构紧凑、(2) 传动比大、(3) 重量轻、(4) 效率高。 11. 一对外啮合圆柱齿轮传动,其转向相反,故传动比为B;而一对内啮合圆柱齿轮传动,其转向相同,故传动比为A。 A.正;B.负。
12. 定轴轮系总传动比等于组成该轮系的各对齿轮传动比的连乘积,其数值等于所有B 轮齿数的连乘积与所有A轮齿数的连乘积之比。 A.主动;B.从动。 13. 对于平行轴定轴轮系,其总传动比的正负号决定于该轮系中外啮合的齿轮对数m,m 是偶数为正,首末两轮转向B。 A.相反;B.相同。 14. 惰轮在计算总传动比数值时A计入,在决定总传动比正负号时B计入。 A. 不需;B.需要。 15. 用箭头表示图中各轮的转向,并指出哪一个是惰轮。 其中z2是惰轮其中z2,z3是惰轮其中z2是惰轮16. 试确定下列定轴轮系的传动比,并确定其末端转动或移动方向。 (1) 卷扬机传动系统,求蜗轮转速及重物G的移动速度及方向。 已知:z1=18,z2=36,z3=20,z4=40,z5=2,z6=50,D=200mm.
第六章 齿轮系及其设计习题解答
6.1 如图6.1所示的轮系中,已知双头右旋蜗杆的转速 9001=n r/min ,转向如图所示,602=z ,252='z ,203=z ,253='z ,204=z 。求4n 的大小与方向。 图6.1 【分析】本题轮系是定轴轮系,而且是轴线不平行的空间定轴轮系。 解: 2.1925 25260202032123414=????==''z z z z z z i 875.462.199004== n r/min 方向如图6.1所示 【评注】参见6.1.3中第(2)部分“空间定轴轮系传动比的计算”。 6.2 如图6.2所示,已知轮系中601=z ,152=z ,202='z ,各轮模数均相同,求3z 及H i 1。
图6.2 【分析】本题是由1、2、2′、3、H 组成一个行星轮系。 解:由同心条件得 )(2 )(22321'-=-z z m z z m 则 651520602213=-+=-+='z z z z 16 316131206065151112132131=-=??-=??-=-='z z z z i i H H 齿轮1与行星架H 的转向相同。 【评注】在求3z 时,应用到行星轮系各齿轮齿数确定的四个条件。比如对于各轮均为标准齿轮的2K —H 型轮系,(1)保证实现给定的传动比113)1(z i z H -=;(2)满足同心条件(即保证两太阳轮和系杆的轴线重合)2132z z z +=;(3)满足k 个行星轮均布安装(即满足装配条件)k z z n 13+=(n 为整数);(4)满足邻接条件(即保证相邻行星轮不致相互碰撞)。 6.3 在图6.3所示轮系中,已知各轮齿数为:1001=z , 304322===='z z z z ,805=z 。求传动比41i 。 【分析】该轮系是一个周转轮系。该轮系有一个行星架H ,三个行星轮(2、2′、3),以及分别和三个行星轮相啮合的三个中心轮(1、4、5)。
轮系习题答案
一、填空题: 1.轮系可以分为:定轴轮系和 周转轮系 。 2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系; 周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。 3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。 4.行星轮系具有 1个自由度,差动轮系有 2自由度。 5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。 6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。 7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。 动力传动中多采用 负号 机构。 二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。双移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为z 1=42,582=z ,38' 3=z ,42' 4=z ,48' 5=z , 48' 6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大 小和方向。 解:3858 48 3842484258'5'31' 6'426116-=????= -==z z z z z z n n i min /9466r n -=(与电动机转动方向相反) 2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。 (1)z z z z z 41231225 520100=++==?= z z z z 75612332060=+==?=
(2)i z z z z z z z z z z 17 323467 12356 1 =-()=- ? ? =- 10060 2020 15 3、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440 = r/min,转动方向如图示, 其余各轮齿数为:40 2 = z,20 '2 = z,30 3 = z,18 '3 = z,54 4 = z,试:(1)说明轮系属于何种类型; (2)计算齿轮4得转速n4; (3)在图中标出齿轮4的转动方向。 (1)定轴轮系 (2)n z z z n z z z 4 1231 234 12018 403054 14408 = ??? ?? = ?? ?? ?= ''r/min (3)n4方向←。 4、如图所示为一手摇提升装置,其中各轮齿数 均已知,试求传动比 15 i,并指出当提升重物时手 柄的转向(从左往右看时的转向) 解:方向判断用画箭头的方法完成,从左往 右看时的转向为逆时针方向。 2345 1 15'' 51234 20304052 '2015118 577.7 z z z z n i n z z z z ??? === ??? =
齿轮机构作业及答案
第5章 思考题 5-1 齿轮传动要匀速、连续、平稳地进行必须满足哪些条件 答 齿轮传动要均匀、平稳地进行,必须满足齿廓啮合基本定律.即i 12=ω1/ω2=O 2P /O 1P ,其中P 为连心线O 1P 2与公法线的交点。 齿轮传动要连续、平稳地进行,必须满足重合度ε≥l ,同时满足一对齿轮的正确啮合条件。 5-2渐开线具有哪些重要的性质渐开线齿轮传动具有哪些优点 答:参考教材。 5-3具有标准中心距的标准齿轮传动具有哪些特点 答 若两齿轮传动的中心距刚好等于两齿轮节圆半径之和,则称此中心距为标准中心距.按此中心距安装齿轮传动称为标准安装。 (1)两齿轮的分度圆将分别与各自的节圆重合。 (2)轮齿的齿侧间隙为零。 (3)顶隙刚好为标准顶隙,即c=c*m=。 5-4何谓重合度重合度的大小与齿数z 、模数m 、压力角α、齿顶高系数h a *、顶隙系数c*及中心距a 之间有何关系 答 通常把一对齿轮的实际啮合线长度与齿轮的法向齿距p b 的比值εα。称为齿轮传动的重合度。重合度的表达式为: εα=[z 1(tan αal —tan α’)±z 2(tan αa2-tan α’)/2π 由重合度的计算公式可见,重合度εα与模数m 无关.随着齿数z 的增多而加大,对于按标准中心距安装的标准齿轮传动,当两轮的齿数趋于无穷大时的极限重合度εα= 此外重合度还随啮合角α’的减小和齿顶高系数h a *的增大而增大。重合度与中心距a 有关(涉及啮合角α’),与压力角α、顶隙系数c*无关。 5-5 齿轮齿条啮合传动有何特点为什么说无论齿条是否为标准安装,啮合线的位置都不会改变 答 由于不论齿条在任何位置,其齿廓总与原始位置的齿廓平行.而啮合线垂直于齿廓,因此,不论齿轮与齿条是否按标准安装,其啮合线的位置总是不变的,节点位置确定,齿轮的节圆确定;当齿轮与齿条按标准安装时,齿轮的分度圆应与齿条的分度线相切。这时齿轮的节圆与其分度圆重合,齿条的常节线也与其分度线重合。因此,传动啮合角α’等于分度圆压力角α,也等于齿条的齿形角α。 5-6节圆与分度圆、啮合角与压力角有什么区别 答 节圆是两轮啮合传动时在节点处相切的一对圆。只有当一对齿轮啮合传动时有了节点才有节圆,对于一个单一的齿轮来说是不存在节圆的,而且两齿轮节圆的大小是随两齿轮中心距的变化而变化的。而齿轮的分度圆是一个大小完全确定的圆,不论这个齿轮是否与另一齿轮啮合,也不论两轮的中心距如何变化,每个齿轮都有一个唯一的、大小完全确定的分度圆。 啮合角是指两轮传动时其节点处的速度矢量与啮合线之间所夹的锐角,压力角是指单个齿轮渐开线上某一点的速度方向与该点法线方向所夹的角。根据定义可知,啮合角就是节圆的压力角。对于标准齿轮.当其按标准中心距安装时.由于节圆与分度圆重合,故其啮合角等于分度圆压力角。 5-7.试问当渐开线标准齿轮的齿根圆与基圆重合时,其齿数应为多少又当齿数大于以上求得的齿数时,试问基圆与齿根圆哪个大 答:cos b d mz α=,
第11章 轮系习题答案(答案类别)
一、填空题: 1.轮系可以分为:定轴轮系和 周转轮系 。 2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系; 周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。 3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。 4.行星轮系具有 1个自由度,差动轮系有 2自由度。 5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。 6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。 7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。 动力传动中多采用 负号 机构。 二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。 双移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为 z 1=42,582=z ,38'3=z ,42'4=z ,48' 5=z , 48' 6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大 小和方向。 解:385848 3842484258'5'31'6'4 26116-=????=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反) 2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。 (1)z z z z z 41231225 520100=++==?= z z z z 75612332060=+==?=
(2)i z z z z z z z z z z 17323467123561=-() =-??=-10060202015 3、在图示轮系中,已知:蜗杆为单头且右旋,转速n 11440= r/min ,转动方向如图示,其余各轮齿数为:40 2=z ,20 '2=z ,303=z ,18 '3=z ,54 4=z ,试: (1)说明轮系属于何种类型; (2)计算齿轮4得转速n 4; (3) 在图中标出齿轮4的转动方向。 (1) 定轴轮系 (2) n z z z n z z z 4123123412018403054 14408=?????=?????='' r/min (3)n 4 方 向←。 4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比15i ,并指出当提升重物时手柄的转向(从左往右看时的转向) 解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。 2 345115''5123420304052'2015118577.7 z z z z n i n z z z z ???===???=
轮系习题及答案(改)
11-1 在图示的轮系中,已知各轮齿数为z z z z z 1235620=====,已知齿轮1、4、5、 7为同轴线,试求该轮系的传动比i 17。 11-2 在如图所示的电动三爪卡盘传动轮系中,已知各轮齿数为16z =,2225z z '==, 357z =,456z =,试求传动比14i 。 11-3 在图示轮系中,已知各轮齿数为120z =,234z =,318z =,436z =,578z =, 6726z z ==。试求传动比1H i 。
11-6 在图示的轮系中,已知各轮齿数为122z =,388z =,46z z =,试求传动比16i 。 11-8 求图示卷扬机减速器的传动比1H i 。若各轮的齿数为124z =,248z =,230z '=, 360z =,320z '=,440z =,4100z '=。 11-10 在图示的轮系中,已知各轮齿数:11z =,240z =,224z '=,372z =,318z '=, 4114z =,蜗杆左旋,转向如图示。求轮系的传动比1H i ,并确定输出杆H 的转向。 11-11 在图示轮系中,各轮模数相同,均为标准齿轮,各轮齿数如下, z z 123050==,,z z z z 4678100303050====,,,,z z 10550120==,。试求轴Ⅰ、Ⅱ之间的传动 比 I,II i 。
第十一章 轮系习题答案 11-1 (1)z z z z z 41231225520100=++==?= z z z z 75612332060=+==?= (2) i z z z z z z z z z z 173 23467 123561=-() =- ??=-10060 202015 11-2 (1)三爪卡盘传动轮系是一个行星轮系,它可以看作由两个简单的行星轮系组成。第一个行星轮系由齿轮1、2、3和行星架H 所组成;第二个行星轮系由齿轮3、2、2'、4和行星架H 组成。 (2)这两个行星轮系通过双联行星齿轮(2和2')复合在一起。 (3)第一个行星轮系的传动比为 1 311315721 11(1)162H H z i i z =-=--=+= (4)第二个行星轮系的传动比为 234434225571 111562556H H z z i i z z '??=-=- =+=-??
齿轮基础题库和答案.docx
习题与参考答案 一、单项选择题(从给出的A、B、C、D 中选一个答案) 1 一般开式齿轮传动的主要失效形式是 C 。 A. 齿面胶合 B. 齿面疲劳点蚀 C. 齿面磨损或轮齿疲劳折断 D. 轮齿塑性变形 2 高速重载齿轮传动,当润滑不良时,最可能出现的失效形式是 A 。 A. 齿面胶合 B. 齿面疲劳点蚀 C. 齿面磨损 D. 轮齿疲劳折断 3 45 钢齿轮,经调质处理后其硬度值约为 B 。 A. 45~50 HRC B. 220~270 HBS C. 160~180 HBS D. 320~350 HBS 4 齿面硬度为56~62HRC 的合金钢齿轮的加工工艺过程为 C 。 A. 齿坯加工→淬火→磨齿→滚齿 B. 齿坯加工→淬火→滚齿→磨齿 C. 齿坯加工→滚齿→渗碳淬火→磨齿 D. 齿坯加工→滚齿→磨齿→淬火 5 齿轮采用渗碳淬火的热处理方法,则齿轮材料只可能是 D 。 A. 45 钢 B. ZG340-640 C. 20Cr D. 20CrMnTi 6 齿轮传动中齿面的非扩展性点蚀一般出现在 A 。 A. 跑合阶段 B. 稳定性磨损阶段 C. 剧烈磨损阶段 D. 齿面磨料磨损阶段 7 对于开式齿轮传动,在工程设计中,一般 D 。 A. 按接触强度设计齿轮尺寸,再校核弯曲强度 B. 按弯曲强度设计齿轮尺寸,再校核接触强度 C. 只需按接触强度设计 D. 只需按弯曲强度设计 8一对标准直齿圆柱齿轮,若z1=18,z2=72,则这对齿轮的弯曲应力 A 。 A. σF1>σF2 B. σF1<σF2 C. σF1=σF2 D. σF1≤σF2 9 对于齿面硬度≤350HBS 的闭式钢制齿轮传动,其主要失效形式为 C 。 A. 轮齿疲劳折断 B. 齿面磨损 C. 齿面疲劳点蚀 D. 齿面胶合 10 一减速齿轮传动,小齿轮1 选用45 钢调质;大齿轮选用45 钢正火,它们的齿面接触应力 C 。 A. σH1>σH2 B. σH1<σH2 C. σH1=σH2 D. σH1≤σH2 11 对于硬度≤350HBS 的闭式齿轮传动,设计时一般 A 。 A. 先按接触强度计算 B. 先按弯曲强度计算 1
轮系习题及答案
11-1在图示的轮系中,已知各轮齿数为,已知齿轮1、4、5、7为同轴线,试求该轮系的传动比。 11-2 在如图所示的电动三爪卡盘传动轮系中,已知各轮齿数为,,,,试求传动比。 11-3 在图示轮系中,已知各轮齿数为,,,,,。试求传动比。 11-6 在图示的轮系中,已知各轮齿数为,,,试求传动比。 11-8求图示卷扬机减速器的传动比。若各轮的齿数为,,,,,,。 11-10在图示的轮系中,已知各轮齿数:,,,,,,蜗杆左旋,转向如图示。求轮系的传动比,并确定输出杆H的转向。 11-11在图示轮系中,各轮模数相同,均为标准齿轮,各轮齿数如下,。试求轴Ⅰ、Ⅱ之间的传动比。 第十一章轮系习题答案 11-1 (1) (2) 11-2 (1)三爪卡盘传动轮系是一个行星轮系,它可以看作由两个简单的行星轮系组成。第一个行星轮系由齿轮1、2、3和行星架H所组成;第二个行星轮系由齿轮3、2、、4和行星架H组成。 (2)这两个行星轮系通过双联行星齿轮(和)复合在一起。
(3)第一个行星轮系的传动比为 (4)第二个行星轮系的传动比为 (5) 轮1与轮4转向相反。 11-3 (a) 因为(b) 把式(b)代入式(a)得 故 11-6 (a) (b) 由式(a)得 (c) 把式(c)代入式(a),得 11-8 (1)图示轮系为一复合轮系,由齿数1、2、、3和行星架H组成差动轮系;由齿轮、4、组成定轴轮系。 (2)定轴轮系的传动比为 (3)差动轮系的转化机构的传动比为
(4)由上式得 齿轮1与卷扬机筒的转向相同。 11-10 定轴轮系: 周转轮系: 复合轮系: 的方向如图所示。 11-11 齿轮1、2、3、4、H(轮10)组成差动轮系。齿轮5、6,7、8、9、10组成定轴轮系。(1) (2) ① (3) ② ③ (4)由式②得 代入式①得:
轮系 习题答案
习 题 答 案 8-1 如图,已知轮系中各轮齿数, Z 1=20, Z 2=50, Z 2‘= 15, Z 3=30 ,Z 3‘=1 , Z 4= 40, Z 4’= 18 , Z 5= 54 ,求i 15和提起重物时手轮转向? 解: 600 181152054403050''3'215 432154=??????==Z Z Z Z Z Z Z Z i 转向如图所示。 题8-1图 8-2已知轮系中各轮齿数, Z 1=27,Z 2=17,Z 3=99,n 1=6000r/min,求i 1H 和n H 。 解: 0 -313313113==--==n z z n n n n n n i H H H H H 26.311 311=+==Z Z n n i H H 设n 1转向为正,则 1 11,min /184026.36000n n r i n n H H H === 8-3如图所示的外啮合周转轮系中,已知Z 1=100, Z 2=101, Z 2'=100, Z 3=99,求系杆H 与齿轮1之间的传动比i H 1。 解: 213223113)1(Z Z Z Z i H H H -=--=ωωωω 代入上式03=ω
100 100991011'21321??=??=-Z Z Z Z H ωω 10000 1100009999111=-==H H i ωω 1000011== ∴ωωH H i 8-4 图示圆锥齿轮组成的周转轮系中,已知Z 1=20, Z 2=30, Z 2‘=50, Z 3=80,n 1=50r/min. 求系杆H 转速。 题8-4图 解: ' 213231Z Z Z Z n n n n H H ??-=-- 等式右边的符号是在转化轮系中确定的。设n1转向为正,则 50 208030050??-=--H H n n min /7.14r n H =∴ 与n1转向相同,方向的判定如图所示。 8-5 如图为标准圆柱直齿轮传动系统,已知Z 1=60, Z 2=20, Z 2‘=25,各轮模数相等,求: 1)Z 3; 2)若已知n 3=200r/min, n 1=50r/min, n 3,n 1转向如图,求系杆H 转速大小和方向; 3)若n 1方向与图中相反时,则系杆H 转速大小和方向如何? 解: 1)首先根据同心条件求出Z 3 )(2 1)(213'221Z Z m Z Z m +=- 153=Z 2)' 21323113Z Z Z Z n n n n i H H H ??-=--= 25 60152020050??-=--H H n n min /75r n H =∴ 转向与n1一致 3)当n1方向相反时,以-50r/min 代入,则 25 60152020050??-=---H H n n min /33.8r n H -=∴ min /33.8r n H -=∴转向与n1一致 8-6 图示轮系中,已知各轮齿数为Z 1=60,Z 2=20,Z 2‘=20,Z 3=20,Z 4=20,Z 5=100,试求传动比i 41。 解:为求解传动比,可以将该轮系划分为由齿轮1、2、2′、5和行星架H 所组成的行星轮 系,得:
11第十一章 齿轮系及其分类
第十一章 齿轮系及其分类 第一节 齿轮系及其分类 如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。根据轮系中各齿轮运动形式的不同,轮系分类如下: ???? ? ??? ????? ?==?? ?成 由几个周转轮系组合而和周转轮系混合而成或混合轮系:由定轴轮系)行星轮系()差动轮系(周转轮系(轴有公转)空间定轴轮系平面定轴轮系 定轴轮系(轴线固定)轮系12F F 图11—1 图11—2 图11—3 定轴轮系中所有齿轮的轴线全部固定,若所有齿轮的轴线全部在同一平面或相互平行的平面内,则称为平面定轴轮系,如图11—1所示,若所有齿轮的轴线并不全部在同一平面或相互平行的平面内,则称为空间定轴轮系;若轮系中有一个或几个齿轮轴线的位置并不固定,而是绕着其它齿轮的固定轴线回转,如图,11—3所示,则这种轮系称为周转轮系,其中绕着固定轴线回转的这种齿轮称为中心轮(或太阳即绕自身轴线回转又绕着其它齿轮的固定轴线回转的齿轮称为行星轮,支撑行星轮的构件称为系杆(或 转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的 基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图11—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图11—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。 图11—4
第十一章 齿轮系及其设计
第十一章齿轮系及其设计 1.简答题: (1)为什么要应用轮系?齿轮系有几种类型?试举例说明。 (2)什么叫周转轮系的“转化机构”?它在周转轮系传动比中起什么作用? (3)i GK是不是周转轮系中G、K两轮的传动比?为什么? (4)周转轮系中两轮传动比的正负号与该周转轮系转化机构中两轮传动比的正负号相同吗?为什么? (5)什么是惰轮?它在轮系中起什么作用? (6)在空间齿轮所组成的周转轮系中,能否用转化机构法求传动比?它需要什么条件? (7)如何从复杂的复合轮系中划分出各个基本轮系? (8)如何确定行星轮系中各轮的齿数?它们应满足什么条件? (9)在差动轮系中,若已知两个基本构件的转向,如何确定第三个基本构件的转向? (10)求复合轮轮传动比的基本思路是什么?能否通过给整个轮系加上一个公共的角速度(- H)的方法来计算整个轮系的传动比?为什么? 2.图7.8所示的轮系中,已知齿轮1的转速n1=120r/min,转向如图所示,而且Z1=40,Z2=20,试求: (1) Z3; (2) n3=0时,齿轮2的转速(大小和方向); (3) n2=0时,齿轮3的转速(大小和方向); 3.在图7.9所是万能刀具磨床工作台横向微动进给装置中,运动经手柄输入,由丝杠传给工作台。已知丝杠螺旋距P=50mm,且单头,Z1=Z2=19,Z3=18,Z4=20。试计算手柄转一周使工作台的进给量s。
4.在图7.10所示轮系中,已知各轮齿数为Z1=30,Z2=25,Z3=Z4`=24,Z5=121,n A=48r/min,n B=316r/min,方向如图所示。试求轮6的转速n6。 5.在图7.11所示的电钻轮系中,已知各齿轮均为标准齿轮,齿数Z1=20,Z2=30,电动机M 的转速n1=3000r/min。试求钻头转速n a的大小及方向。 6.图7.12所示轮系中,z1=20,z2=30,z3=z4=z5=25,z6=75,z7=25,n A=100r/min.方向如图所示。 求n B。
轮系及其设计习题解答
3 2' 1 O 1 2 3'O 3 O 4 4 O 2 第六章 齿轮系及其设计习题解答 在图示的手摇提升装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提升重物时手柄的转向。 解:2001 152040 305053164216=????== z z z z z z i 方向:从左往右看为顺时针方向。 题 图 题 图 在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z , 404=z 。试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施 解: (1) 620 202040 304032143214-=????== ''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—” (2)如要变更i 14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。 在图示的机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针的传动比SM i 和分针与时 针的传动比MH i 。 解: 该轮系为平面定轴轮系,故有 608864 60)1(463524664=??=-==== z z z z n n i n n i M S SM 126 824 24)1(11912102129912=??=-==== z z z z n n i n n i H M MH