热仿真软件-Flotherm11.0安装教程-078

热仿真软件Flotherm11.0安装教程
FLOTHERM是一套由电子系统散热仿真软件先驱----英国FLOMERICS软件公司开发并广为全球各地电子系统结构设计工程师和电子电路设计工程师使用的电子系统散热仿真分析软件,全球排名第一且市场占有率高达80%以上。
FLOTHERM 采用了成熟的CFD(Computational Fluid Dynamic计算流体动力学)和数值传热学仿真技术并成功的结合了FLOMERICS公司在电子设备传热方面的大量独特经验和数据库开发而成,同时FLOTHERM软件还拥有大量专门针对电子工业而开发的模型库。
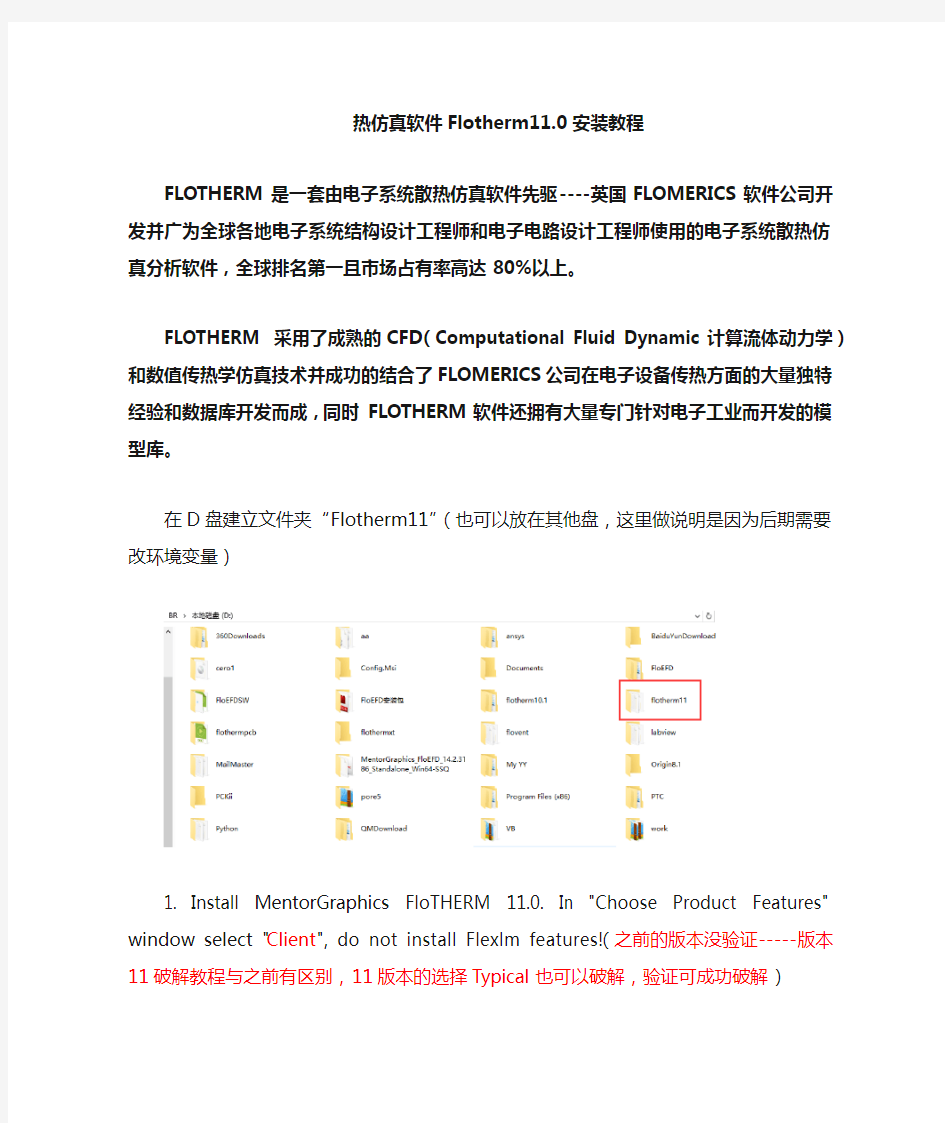
在D盘建立文件夹“Flotherm11”(也可以放在其他盘,这里做说明是因为后期需要改环境变量)
1. Install MentorGraphics FloTHERM 11.0. In "Choose Product Features" window select "Client", do not install Flexlm features!(之前的版本没验证-----版本11破解教程与之前有区别,11版本的选择Typical也可以破解,验证可成功破解)
单位选择国际单位(SI)
安装在刚刚建立的文件夹中。
2. Copy files "MGLS.DLL" and "MGLS.DLL" to [D:\flotherm11\flosuite_v11\common\WinXP\bin\ (by default C:\Program Files\MentorMA\flosuite_v11\common\WinXP\bin\ ) and overwrite original ones)]
3.
拷取license文件放在任意文件夹并创建环境变量,鉴于有些新手不会,这里做出教程。
此处,将license文件放在flotherm11文件夹中。
打开电脑系统设置,点击“高级系统设置”。
点击环境变量。
点击“新建”,建立新的用户变量。
可以建立MGLS_LICENSE_FILE=full path to license.dat or LM_LICENSE_FILE=full path to license.dat者两种环境变量名,选择其一即可。
4. Enjoy
本方法仅供软件交流体验使用,如长期使用(超过一个月)或为公司所用(用于收益性项目),请购买正版软件,详情请登录海基科技或者上海坤道信息技术有限公司联系购买。(2016年01月24日)
------------by BR
如有问题,请扫如下二维码
Arduino智能小车安装说明
Aduino智能小车安装说明 产品概述: 该套件可以智能判断引导线并检测躲避障碍物,可实现自动导引和避障功能,AS-4WD寻线避障移动机器人使用Mini红外寻线传感器感知引导线,使用Mini红外避障传感器感知障碍物。 充电开关 步骤1:准备工作 ?将导线剪成要求长度,在其端部将导线的外皮剥除,镀锡。 ?将准备好的热缩管均匀的用斜口钳剪成6段 ?将充电接口和拨动开关焊接好接线,注意图中拨动开关的连接,一定要按照图示进行操作!(拨动开关具有单向导通特性)。 步骤2:连接充电接口和拨动开关 将两个部件连接到一起之前要把热缩管套到红色短导线上
用扎带将导线整理好,是其显得规整一些,然后用斜口钳把扎带多余的部分去掉,这样一个既能充电又能作为开关使用的充电开关就做好了 电源连接线图示
平台安装步骤 步骤1:平台侧板电机安装 两侧电机安装相同,注意安装前将电机接线用电烙铁焊接好,套上热缩管加热塑封。使用零件:平台侧板*2个、直流减速电机*4个、M3*25螺丝*8个、M3六角螺母*8个 步骤2:平台底板安装 使用零件:步骤1中安装好电机的侧板*2套、平台底板*1个、M3*6螺丝*4个
步骤3:双H桥电机驱动板安装 驱动板安装方向随意,注意同侧电机接线方向顺序,保证同侧电机转向是相同的。 使用零件:步骤2中的组合体、双H桥直流电机驱动板*1个、M3*10尼龙柱*4个、M3六角螺母*4个、M3*6螺丝*4个
步骤4:电池盒安装 电池盒可用双面胶固定,后轮电机接线需插入杜邦线帽,接入步进电机接口 使用零件:电池盒*1个或锂电池*1块 步骤5:4WD端板安装 使用零件:4WD端板*1个、步骤4中的组合体*1个、M3*6螺丝*4个、M3六角螺母*4个
高清车牌识别系统安装与调试介绍册(详细版本)
高清智能车牌识别系统安装与调试手册 V2.1(详细版本)
智能车牌识别停车场管理系统简介 智能车牌识别停车场管理系统是我司根据当前市场发展与客户的需要,开发 出来的一款以车辆车牌作为车辆进出车场主要凭证,同时可辅以IC卡刷卡、可 实现固定车辆和临时车辆收费、基于以太网的停车场管理系统。该系统支持多通 道进出与图像对比、满足复杂的收费需求;数据处理速度快、信息存储安全、扩 展性强,能根据用户的需求,提供合适的停车场系统解决方案。 主要特点: ●正常情况下,完全以车牌作为出入场凭证 ●对临时车牌可进行精确收费,月租车牌过期后可进行临时收费,有效地防止停 车费用的流失 ●具备脱机与脱网功能。在脱机与脱网时,月租用户可自由出入 ●车牌识别一体机可代替传统的视频系统,不需要补光灯、摄像机等。成本 低,有较强的竞争力 ●支持多种车牌识别器,客户可选择面多 ●提供多种网络显示屏,可播放与显示广告词、出入场欢迎词、时间、剩余 车位、收费金额等
目录 第一章系统配置 (1) 1.1系统相关材料、器件的准备 (1) 1.1.2 软件清单 (1) 1.2工具需求 (1) 第二章软件安装 (1) 2.1 PC机型及配置的选择 (1) 2.1.1硬件环境 (1) 2.1.2 软件环境 (1) 2.1.3 局域网通讯环境 (2) 2.2 数据库安装 (2) 2.3 停车场系统软件安装 (10) 第三章车道信息显示屏安装 (14) 3.1车道信息显示屏安装 (14) 3.6车牌识别相机的安装接线 (15) 第五章系统调试 (17) 5.1网络的组建 (17) 5.2 系统初始化设置 (20) 5.2.1启动SQL Server服务器 (20) 5.1.3 数据库创建配置 (22) 5.1.4 运行车牌识别系统服务服务器 (26) 5.1.5 车牌识别系统初始化 (26) 5.1.5.1管理员登录 (26) 5.1.5.2系统参数初始化 (26) 5.1.5.3创建岗亭 (28) 5.1.5.4创建通道 (29) 5.1.5.5设置收费规则 (31) 5.1.5.6注册车牌 (33) 5.12 数据整理与系统备份 (34)
高清车牌识别系统安装与调试手册V2.1(详细版本)
高清智能车牌识别系统安装与调试手册 V2.1(详细版本)
智能车牌识别停车场管理系统简介 智能车牌识别停车场管理系统是我司根据当前市场发展与客户的需要,开发 出来的一款以车辆车牌作为车辆进出车场主要凭证,同时可辅以IC卡刷卡、可 实现固定车辆和临时车辆收费、基于以太网的停车场管理系统。该系统支持多通 道进出与图像对比、满足复杂的收费需求;数据处理速度快、信息存储安全、扩 展性强,能根据用户的需求,提供合适的停车场系统解决方案。 主要特点: ●正常情况下,完全以车牌作为出入场凭证 ●对临时车牌可进行精确收费,月租车牌过期后可进行临时收费,有效地防止停 车费用的流失 ●具备脱机与脱网功能。在脱机与脱网时,月租用户可自由出入 ●车牌识别一体机可代替传统的视频系统,不需要补光灯、摄像机等。成本 低,有较强的竞争力 ●支持多种车牌识别器,客户可选择面多 ●提供多种网络显示屏,可播放与显示广告词、出入场欢迎词、时间、剩余 车位、收费金额等
目录 第一章系统配置 (1) 1.1系统相关材料、器件的准备 (1) 1.1.2 软件清单 (1) 1.2工具需求 (1) 第二章软件安装 (1) 2.1 PC机型及配置的选择 (1) 2.1.1硬件环境 (1) 2.1.2 软件环境 (1) 2.1.3 局域网通讯环境 (2) 2.2 数据库安装 (2) 2.3 停车场系统软件安装 (10) 第三章车道信息显示屏安装 (14) 3.1车道信息显示屏安装 (14) 3.6车牌识别相机的安装接线 (15) 第五章系统调试 (17) 5.1网络的组建 (17) 5.2 系统初始化设置 (21) 5.2.1启动SQL Server服务器 (21) 5.1.3 数据库创建配置 (23) 5.1.4 运行车牌识别系统服务服务器 (27) 5.1.5 车牌识别系统初始化 (27) 5.1.5.1管理员登录 (27) 5.1.5.2系统参数初始化 (27) 5.1.5.3创建岗亭 (29) 5.1.5.4创建通道 (30) 5.1.5.5设置收费规则 (32) 5.1.5.6注册车牌 (34) 5.12 数据整理与系统备份 (35)
软件安装通用教程(软件安装注意事项)
软件安装通用教程 一.认识常用软件 1.电脑检测、优化、管理:360安全卫士、腾讯电脑管家等; 2.杀毒软件:360杀毒、腾讯电脑管家、金山毒霸、瑞星等; 3.聊天软件:QQ、MSN、微信等; 4.浏览器:QQ、360、搜狗、遨游、世界之窗、腾讯TT等; 5.输入法:搜狗拼音、QQ拼音、极品五笔、万能五笔等; 6.图片浏览:2345看图王、美图看看、光影看看、可牛看图、QQ影像等; 7.图片处理:美图秀秀、光影魔术手、PS等; 8.音频播放:酷狗音乐、酷我音乐、百度音乐、QQ音乐等; 9.视频播放:优酷、暴风影音、爱奇艺、迅雷看看、QQ影音; 10.压缩软件:WinRAR、2345好压、快压等; 11.办公软件:微软Office、金山WPS、永中Office等; 12.设计软件:PS、AI、CAD、3D等; 二.准备(检查电脑配置) 1.计算机/属性 2.控制面板/系统 重点检查以下两项: 1、自己操作系统版本:Windows系统(具体哪个版本)或Mac系统; 2、系统类型是32位还是64位系统 三.获取安装程序 1.安装光盘/U盘; 2.从官方网站下载; 3.从第三方网站下载(百度软件中心、太平洋下载中心、ZOL中关村在线等); 4.通过第三方管理软件下载安装(360软件管家、QQ软件管家等)。 5.购买 四.安装 1.常规安装方式 1)安装文件为单个文件的情况(双击exe或msi文件); 2)安装文件为多个文件的情况(双击setup.exe或install.exe或与软件名称相同的文件)2.绿色版 所谓绿色版或者绿色软件指的是不用安装的软件,通常情况是是一个压缩文件,解压后就能直接运行的,也可以拷贝到便携的U盘上到处运行,精简、免安装、移植性强。当然有些需要运行注册表文件。绿化版卸载也很简单,直接删除原文件即可。 3.破解版
新双电机智能小车组装教程
电机支架 M3*8螺丝 M3螺母 金属底板 电机 M3*6螺丝 双电机智能小车装配教程 准备工作:备好螺丝刀、十字套筒、配套螺丝、相关支架。 组装过程:组装前对照我们的发货清单检查下物品是否齐全。 检查好了我们就开始组装。 1. 拿出金属底板、电机支架、M3X8螺丝、M3螺母如下图组合在一起: 2. 拿出电机,将电机装到上面支架上。用M3*6螺丝固定好如下图: 正面 反面 正面 侧面
正面 M3*6螺丝 M3*8螺丝 3. 拿出6mm 联轴器跟车轮分别装到电机输出轴上,如下图所示: 4. 拿出多功能支架固定在金属底板上,如下图所示: 反面 联轴器 车轮 侧面放大视图 M4*6 M3螺母 多功能支架
支撑板 (锁 M3*8螺丝) 注意:舵机的输出轴在这侧 M3*22铜柱 (反面锁M3*8螺丝) M3螺母 M3*10螺丝 5. 拿出舵机装在上面多功能支架上(舵机默认在中间位置,不要人为转动输出轴),如下图: 6. 拿出M3*22铜柱、支撑板分别固定在底板上如下图:
7.拿出相关支架,按下图组装在一起: 把两个轴承放进转向杯里,大小轴承里外各放一个,使轴承完全卡进转向杯里。 8.然后将轮子跟这个转向杯用M4X20螺丝、M4自锁螺母装在一起。如下图: 自锁螺母这头用十字套筒套住,另外一边用螺丝刀转动M4x20螺丝,不要锁太紧要保证轮子能够自如转动。用这种方法装好两个轮子放在一旁。
M2*35螺丝 舵盘支架 注意:这里用套筒跟小扳手紧固的时候不要将M2自锁螺母完全锁死,要保证其与底板之间有一点空隙。 舵盘 舵盘 M2小扳手 9. 将两个前轮安装到上面支架上,如下图所示: 10. 拿出一个金属舵盘跟舵盘支架,将舵盘跟舵盘支架依次装在舵机上如下图: M3*6螺丝 套筒 注意:这里舵盘安装时两孔之间连线要保证在水平跟垂直位置。 M2自锁螺母
爱普生机器人软件安装及使用教程
爱普生机器人软件安装 及使用教程 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
爱普生机器人软件安装及使用教程一、EPSONRC+开发软件的安装 打开EpsonRC50文件夹,双击开始安装。 出现上面显示的界面后,按按钮。 出现上面显示的界面后,再接着按按钮。 目标驱动器不必选择,直接按按钮。 上面可勾选部分为手册和模拟器实例,可以按默认安装,直接按按钮进行到安装的下一步。 按按钮选择继续安装。 会出现下面的安装进度界面,大约需要等待几分钟,整个EpsonRC50软件安装完成。 安装完成后,将弹出下面的窗口。按按钮完成软件的安装。 此时,在用户的桌面上会出现下面两个图标 前一个图标用于软件的开发和调试,后面的图标用于对工作流程的监视。 二、IP地址的设置 用普通网线连接机器人和开发用电脑。 打开本地连接,弹出“本地连接属性”页面。
双击项,将打开Internet协议(TCP/IP)属性页面,修改IP地址等项为下图的值。按键。完成IP的设定。 三、EPSONRC+软件使用 双击图标,启动EPSONRC+软件。 1.网络通讯的设置 在EPSONRC+软件菜单中点击“设置”菜单项,单击选择 项目。将弹出下面“电脑与控制器通信”页面。 点击按钮。 选择选项,按键,完成添加网络通讯功能。 按钮,完成软件中连接IP的设置。设置完成后页面显示为下图。 检查网线连接是否正常,正常则单击新添加的Ethernet项,按按钮,弹出下面页面。 选项表示电脑只作为监视器使用,不能进行程序的编制、修改等操作,不能对机器人控制点进行示教,也不能对外部I/O进行控制。不影响已经存在的网络连接。
智能循迹小车详细制作过程
(穿山乙工作室) 三天三十元做出智能车 0.准备所需基本元器件 1).基本二驱车体一台。(本课以穿山乙推出的基本车体为例讲解) 2).5x7cm 洞洞板、单片机卡槽、51单片机、石英晶体、红色LED 、1K 电阻、10K 排阻各一个;2个瓷片电容、排针40个。 3).5x7cm 洞洞板、7805稳压芯片、红色LED 、1K 电阻各一个;双孔接线柱三个、10u 电解电容2个、排针12个、9110驱动芯片2个。 4).5x7cm 洞洞板、LM324比较器芯片各一个;红外对管三对、4.7K 电阻3个、330电阻三个、红色3mmLED 三个。 一、组装车体 基本设计思路: 1.基本车架(两个电机一体轮子+一个万向轮) 2.单片机主控模块 3.电机驱动模块(内置5V 电源输出) 4.黑白线循迹模块
(图中显示的很清晰吧,照着上螺丝就行了) 二、制作单片机控制模块 材料:5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40个。 电路图如下,主要目的是把单片机的各个引脚用排针引出来,便于使用。我们也有焊接好的实物图供你参考。(如果你选用的是STC98系列的单片机在这里可以省掉复位电路不焊,仍能正常工作。我实物图中就没焊复位)
三、制作电机驱动模块 材料:5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一个;双孔接线柱三个、10u电解电容2个、排针12个、9110驱动芯片2个。 电路图如下,这里我们把电源模块与驱动模块含在了同一个电路板上。因为电机驱动模块所需的电压是+9V左右(6—15V 均可),而单片机主控和循迹模块所需电压均为+5V。 这里用了一个7805稳压芯片将+9V电压稳出+5V电压。 +9V
智能车安装图文教程
直插发光二极管,直插电解电容都有正负极之分,长脚为正,短脚为负。贴片发光二极管从正面看注意有标记的一边为负极,标记可能是一个小点,或一条细线。 红外线发光二极管点亮后肉眼看不出来,可以借助手机摄像头观察,就可以判断这个 发光二极管好坏。 找出集成电路的引脚1:贴片集成电路的正面有一个小凹点,这个凹点对应的引脚就是 引脚1,双列直插集成电路的正面边沿有一个小缺口,把这个集成电路的缺口朝上放,缺口左边第一个引脚就是引脚1.
电机没有正负极之分,但是需要注意两个电机的接法要相同。
四路红外线感应二极管的灵敏度调节 红外感应灵敏度控制原理: 图1 如图1,红外线接收二极管D2反接在电路中,其反向电流会随着受到的红外光线照射量的大小而变化,红外光线增强,反向电流增大。R2上的电压增大。这个电压输出到电压比较器的一个输入端3。电压比较器的另外一个输入端2的电压通过可调电阻Rp1调节。当电压比较器的3脚电压高于2脚电压时,比较器输出1(5V),发光二极管D3两端电压相同,不会发出光亮。当3脚电压小于2脚电压时,比较器输出0V,D3正偏导通,发出光亮。调节RP1,使比较器的2脚电压变得很低。当D2受到及小的红外光照射时,比较器3脚的电压也会比2脚高,使得比较器输出5V电压,D3截止。调节Rp1使比较器的2脚电压升高,这样就需要更大的红外线照射量才会使比较器输出5V。这样就实现了红外感应灵敏度调节。 调节灵敏度:。用于循黑线时,将红外线收发二极管对准黑线。调节RP1,使得D3刚好处于点亮状态,(比较器2脚电压只比3脚高一点点,比较器输出0),这样,红外线感应灵敏度就调好了。用于避障时,将红外接收二极管对准空旷的地方(前方没有障碍物) ,调节RP1,使得D3刚好处于点亮的状态,(比较器2脚电压只比3脚高一点点,比较器输出0),这样,红外线感应灵敏度就调好了。 在智能车上,采用集成电路LM339,他是一个四路电压比较器,在内部有四个独立的电压比较器,只要知道如何调整其中一个的灵敏度。其余相同。
51智能小车安装指导说明书V1.0
POWSOS-51小车安装指导说明书 V1.0 版本说明: 2014-8-13V1.0
POWSOS-51智能小车的电源模块、驱动模块均已焊接到小车底盘上(底板正面焊接芯片),红外小板也焊接完毕,超声波模块固定需自行焊接。 材料清单: 小车底板1片 POWSOS-51主板1片 驱动电机固定支架4片 超声波小板1片 超声波模块1片 红外小板1片 电池盒1个 驱动电机(带变速箱)2只 舵机(带舵机臂,螺丝)1包 万向轮1只 M2x25螺丝(带螺母)2颗 M3x25螺丝(带螺母)4颗 M3x5螺丝16颗 M3x11铜柱8颗 M3x30铜柱2颗 轮胎2只 杜邦线(母对母)26pin 驱动电机导线2对(共4根)由电池引线截取4cm长便可14500锂电池1对 104瓷片电容2颗
安装步骤: 1.取M3x11铜柱4颗,M3x5螺丝4颗。安装ARDUINO UNO主板固定铜柱,POWSOS-51主板先不安装。如图: 2.焊接驱动电机引线,引线可以从电池盒线(较长有多余)截取,约4CM长,红黑各两段。引脚面向自己,左正右负,引线另一端暂不焊接到底板,以免安装电机时有妨碍。焊接方式如图:
为减少驱动电机电磁干扰(主要影响舵机,舵机不使用的时候必须拔掉插头,免得损坏),在电机两极就近焊接104瓷片电容(电容脚不要搭到电机壳和万向轮等金属):(之后照片未拍摄电容,望谅解) 取4片电机固定支架,M3x25螺丝(带螺母)4颗,把驱动电机固定到底板。
首先,插入一片固定支架到内侧插槽,另取一片安装到驱动电机上: 然后扣到底板上,注意左右电机安装方向,紧固螺丝:(另一侧重复步骤)
雕刻机软件安装教程
雕刻机控制系统维宏(ncstudio)软件安装 1.打开ncstudio5.4.49文件夹,双击安装程序Setup.exe 开始安装。按着提示一直下一步一 直到安装结束。 2.关闭计算机,打开电脑盖,把控制卡插入PCI插槽,并用白色数据线把电脑和机器连接 起来。(注意连接数据线是,机器电源一定要关闭,插拔控制卡时,电脑一定要关闭) 3.重新打开计算机,等待出现驱动提示窗口点击安装(可根据需要选择安装目录) 4.安装完成之后,打开控制软件ncstudio 5.4.49 5.如果双击ncstudio5.4.49 软件图标打开软件时,出现窗口提示‘硬件安装失败’时,请 进行一下操作。(我的电脑—属性—硬件—设备管理器—数控适配器网络和计算机加密解密控制器(看这个地方是不是有黄色感叹号如果有的话就说明缺少驱动需进行一下操作)更新驱动程序---自动安装软件---下一步直到驱动安装成功。(驱动安装成功之后黄色感叹号会自动消失) 6.双击桌面软件图标ncstudio5.4.49,打开软件。 7.接下来进行参数设置。(下面是以方轨6090为例参数设置) 加工参数设置: 设置完了一定要点击应用!!!
厂商参数设定:密码为(ncstudio) 设置好了之后一定要点击应用!!(请注意机器配置不同这里设置的厂商参数是不同的)以上仅供参考。
手动控制机器 鼠标点击X—,X+,Y-.Y+,Z-,Z+, 机器会往对应的方向运行。 8.具体软件操作说明参考维宏软件手册。
Artcam 刀具路径编辑软件安装 1.解压artcam安装软件文件夹,解压之后打开“artcam安装软件”—“Artcam.2008.Pro. 简体中文版.立体浮雕”--- 双击图标进行安装。 选择chinese(Simplified),点击 OK。然后一直点击下一步按着提示安装。 2.软件安装成功之后,不要急着打开artcam 软件,重新双击打开“artcam 安装软件”文 件夹----“artcam2008 破解”---Crack---“Program Files”---“Artcam 2008”---“Exec”--复制这两个图,粘贴到artcam2008 安装文件夹下。一般默认是安装到C盘。下面我们以安装到C盘为例: 计算机(我的电脑)---C盘---Artcam2008文件夹----打开Exec文件---把刚才复制的 这两个图标粘贴到这里,点击粘贴之后会提醒你是否复制和替
智能车制作全过程
智能车制作全过程 (本人在很久以前做的一辆用来比赛的智能车--获得华北一等奖,全国二等奖,有许多可改进地方.) 下面我们来立即开始我们的智能车之旅: 首先,一个系统中,传感器至关重要.
"不管你的CPU的速度如何的快,通信机制如何的优越,系统的精度永远无法超越传感器的精度" .是的,在这个系统中,传感器的精度,其准确性就显得至关重要.如果你问我传感器的电路,呵呵,我早就和大家分享了,在我发表的日志中,有一篇<<基于反射式距离传感器>>的文章就详细的说明了传感器的硬件电路以及可以采取的信号采样方式. 传感器安装成一排,如上面排列.(就是个一字排列,没有什么特别) 接下来,看看我们如何处理传感器得到的信息:
大家看到了.结构很简单,我们已经搞定了传感器通路.下面我们来看看多机的控制方面的问题:
其实,不管是便宜还是比较贵的舵机,都是一样的用法.舵机的特点就是不同的占空比方波 就对应着舵机的不同转角.当然不同的舵机有不同的频率要求.比如我用的这个舵机:方波频率50HZ。 仔细看,和后轮之间有一条皮带的这个貌似电机的东西,就是我的速度传感器,它的学名叫"旋转编码器".这个器件的特点就是:每转一圈,就会从输出端输出一定的脉冲,比如我这个旋转编码器是500线的,就是转一圈输出500个脉冲.因此,我只要在单位时间内计数输出端输出的脉冲数,我就可以计算出车辆的速度.显然,这个速度可以用来作为PID速度调节的反馈. 现在有了反馈,我们需要的是调节智能车驱动电机的速度了,如何来调速,就成了必须解决的问题了.我用的是驱动芯片MC33886.
其实,这个芯片就是一个功率放大的模块.我们知道,单片机输出的PWM信号还是TTL信号,是不能直接用来驱动电机的.非要通过功率模块的放大不可.这个道理其实很简单,就像上次我给大家画的哪个电子琴电路的放大电路一样: 看上面的那个三极管,就是将TTL电路的电流放大,才能够来驱动蜂鸣器.其实这里的这个MC33886就是这样的一个作用.而且我们自己也完全可以用三极管自己搭建一个这样的功率放大电路,当然,驱动能力肯定不如这里的这个MC33886(如我们用三极管就搭建了超过
黑莓手机安装软件教程
黑莓手机安装软件教程 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
部分新手莓友初入手BB,想安装一些软件,但又不知如何下手。 最简单的方法就是使用手机自带浏览器访问这类OTA网站下载安装软件。 但论坛上莓友们分享的众多软件应该如何安装呢下面主要为新手莓友简单介绍使用“桌面管理器”安装软件的方法。 新手教程,对黑莓已经比较了解的莓友可以飘过。 小常识: 黑莓的软件一般分为两种格式: 1)alx + cod 格式文件,这种需要将手机与电脑连接,通过“桌面管理器”或“黑莓右键总管”安装。 2)jad + cod 格式文件,这种可以直接拷贝到手机里运行jad文件安装。 其实如这种OTA网站下载下来的只是jad文件,jad文件下载下来后运行jad 时,手机会根据jad里的引导信息继续下载cod文件,两个文件都下载完成后就安装完毕。 如果已经同时有了jad和cod两种文件,运行jad时,还是会提示下载,这个时候不用担心,那只是在加载已经存在的cod文件,不会真的去下载产生流量。一般论坛上莓友分享的都是软件压缩包,所以你下载的软件到底是 alx + cod 还是 jad + cod,解压后就可以知道。按照相关的方法操作就可以了,其实黑莓并不是那么难以接近 我这里以7。1版为例。要桌面管理器的可以到360安全卫士的软件管理里搜索“黑莓桌面管理器”就可以下载的到了。我不做废话的介绍了,大家看图应该就能够明白。
第一种方法应用程序加载器(按照这个路径找到这个文件,打开文件C:\ProgramFiles\CommonFiles\ResearchInMotion\AppLoader\) 就显示: 点下一步,后如图: 点下一步出现如图:这里显示了PIN码后就代表手机连接电 脑成功 如果这里没显示就检查数据线和电脑 点击这里把你下载 的软件添加进来。
BT软件安装教程
BT10.1安装教程 明月老师2698498938 2013-7-12 一、简介 BT10.1.0.0是广场舞联盟破解的BT软件版本。 1.百度云盘下载地址: https://www.360docs.net/doc/cc3369913.html,/share/link?shareid=2080692704&uk=2383951279 2.该软件压缩包10.5MB,解压缩后的文件容量有15.5MB, 包含有3个文件夹,3个记事本文件, 和一个安装文件“BluffTitlerSetup.exe”,一共有7个。 3.其中: (1).Media文件夹(媒体文件夹),该文件夹包含了破解后的大量文件。(2).ScreenEmulators文件夹,是某特效文件夹。 (3).ScreenEmulators屏幕模拟器文件夹,也是某特效文件夹。 (4).BluffTitlerSetup.exe文件,是BT的安装文件。 (5).编号中文10.1.0.0.txt文件,是BT的汉化文件。 (6).简体中文全10.1.0.0.txt文件,也是BT的汉化文件。 (7).注册码.txt文件,是用来注册的3把钥匙的文件。 下载保存到D盘\Guaxue\BT文件夹中 图1
对着压缩包右键——解压到当前文件夹 图2 进入该文件夹,看到的文件和文件夹 图3 ///////////////////// 二、安装 1.下载文件,把压缩包保存到D盘的Guaxue文件夹中的BT文件夹中。见图1 。 2.解压缩,对着压缩包右键——选解压到当前文件夹。见图2 。 3.双击解压缩后的文件夹,进入到有安装文件的文件夹内。见图3 。
4.关闭所有的防护软件,例如360安全卫士和杀毒软件等, 包括QQ管家等都要关闭。以后,凡是安装软件,建议都关掉杀软和浏览器。 5.安装步骤: (1).运行(双击)安装文件BluffTitlerSetup.exe 。见图4 。 双击红色的BT图标,进入安装步骤 图4 (2).弹出英文界面(意思是:欢迎安装BT),下面有2个按钮, 第1个是Next(下一步),第2个是Cancel(取消)。 我们点按钮“下一步”。 (3).弹出第2个画面,也是英文的,下面有3个按钮。 第1个是Back(后退一步),第2个是I Agree(我同意),第3个是Cancel(取消)。 我们点按钮“我同意”。见图5 。