《自动控制原理》---丁红主编---第三章习题答案
习题
3-1.选择题:
(1)已知单位负反馈闭环系统是稳定的,其开环传递函数为:)
1(2)
s )(2
+++=s s s s G (,系统对单位斜坡的稳态误差是: 3-2 已知系统脉冲响应
t e t k 25.10125.0)(-=
试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+00125125
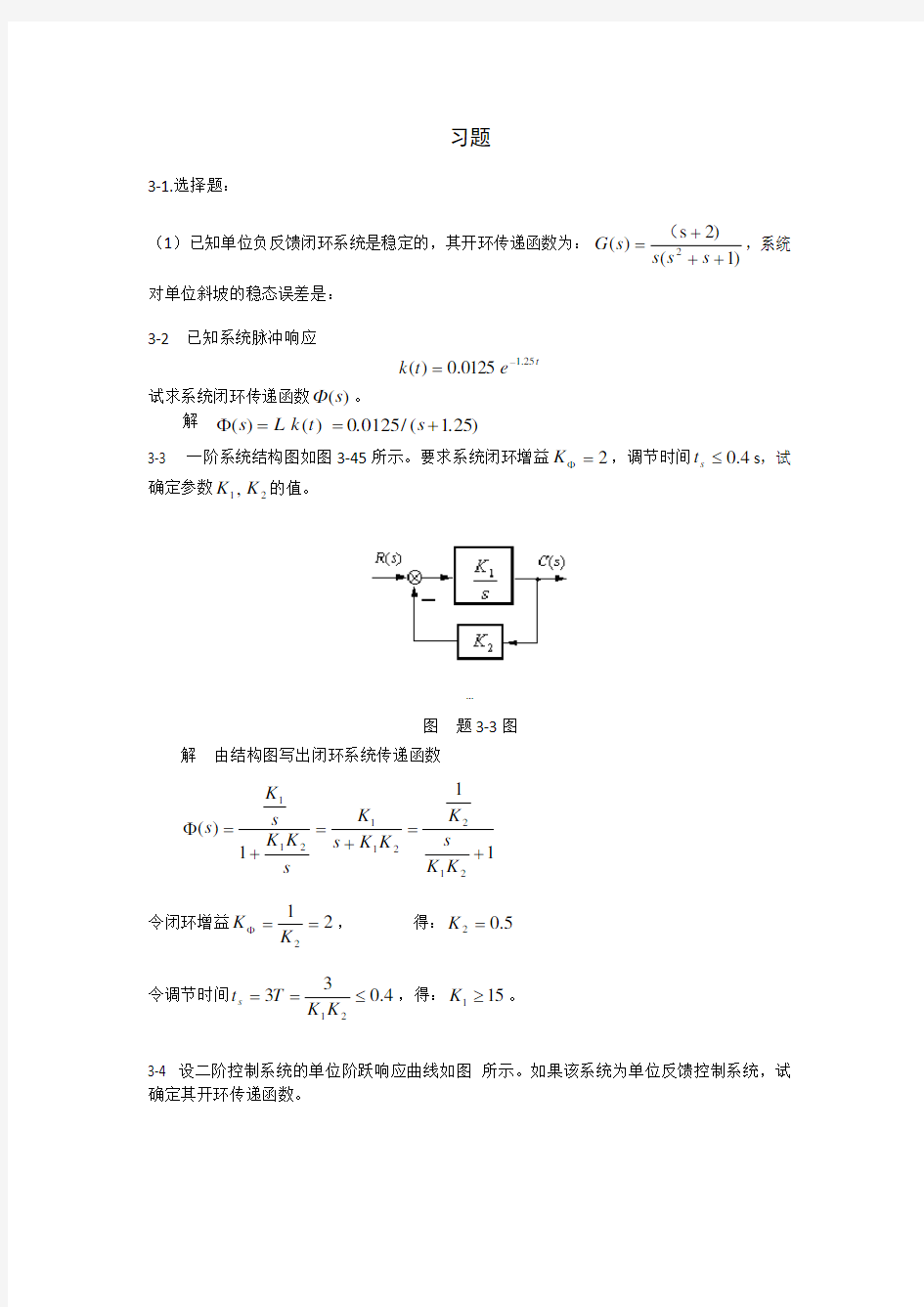
3-3 一阶系统结构图如图3-45所示。要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
…
图 题3-3图
解 由结构图写出闭环系统传递函数
111)(212211211
+=
+=+
=ΦK K s
K K K s K s
K K s K s 令闭环增益21
2
==
ΦK K , 得:5.02=K 令调节时间4.03
32
1≤=
=K K T t s ,得:151≥K 。
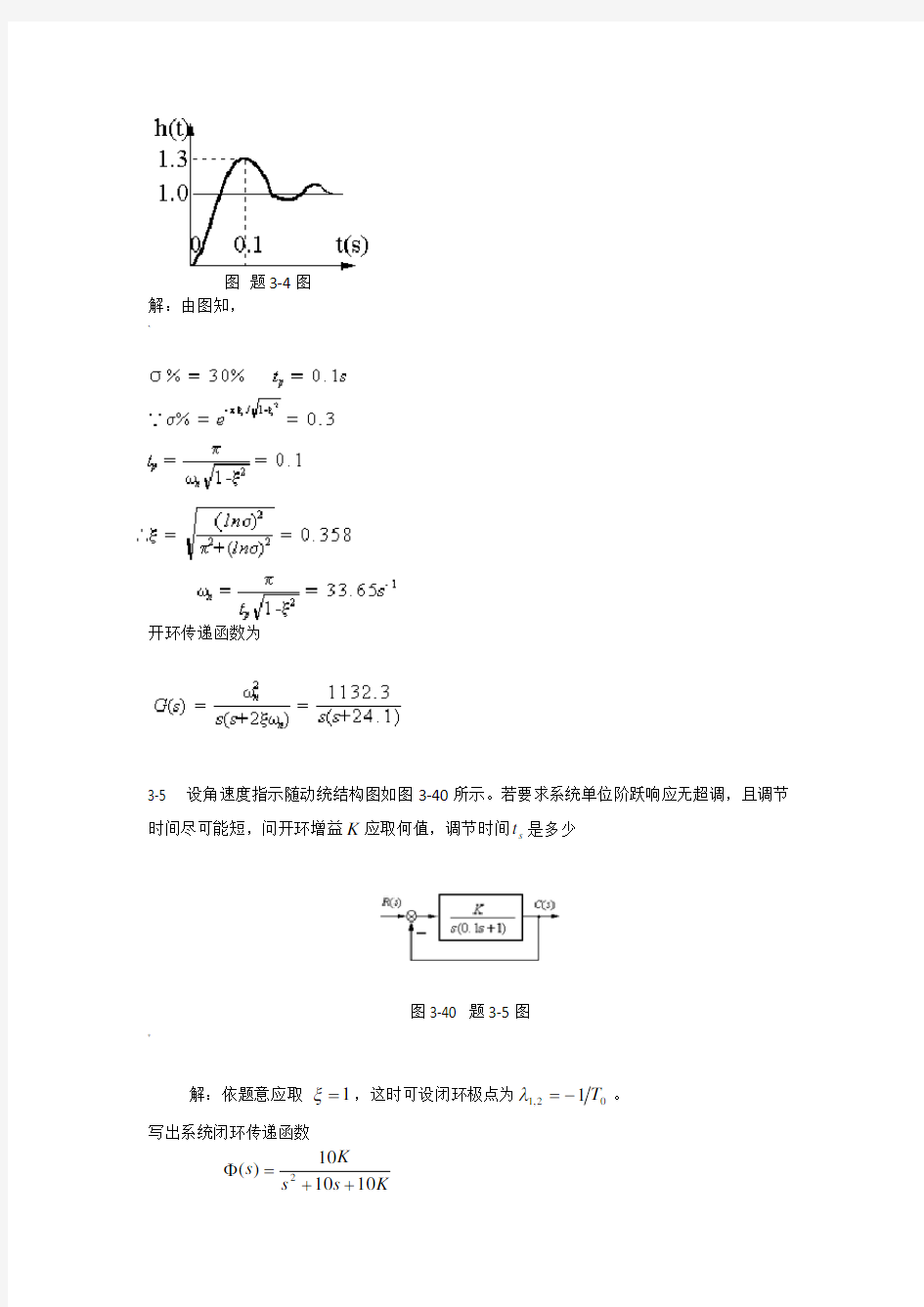
3-4 设二阶控制系统的单位阶跃响应曲线如图 所示。如果该系统为单位反馈控制系统,试确定其开环传递函数。
图 题3-4图 解:由图知,
`
开环传递函数为
3-5 设角速度指示随动统结构图如图3-40所示。若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K 应取何值,调节时间s t 是多少
图3-40 题3-5图
*
解:依题意应取 1=ξ,这时可设闭环极点为02,11T -=λ。 写出系统闭环传递函数
K
s s K
s 101010)(2
++=
Φ
闭环特征多项式
2
002
2
021211010)(???
?
??++=????
??+=++=T s T s T s K s s s D
比较系数有 ????
???=???
? ??=K T T 10110
2
2
00 联立求解得 ???==5.22.00K T 因此有 159.075.40''<''==T t s
;
3-6 图所示为某控制系统结构图,是选择参数K 1和K 2,使系统的ωn =6,ξ=1. 【
3-7 已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。 (1)01011422)(2
345=+++++=s s s s s s D (2)0483224123)(2
345=+++++=s s s s s s D
、
(3)022)(4
5
=--+=s s s s D
(4)0502548242)(2
3
4
5
=--+++=s s s s s s D
解(1)1011422)(2
3
4
5
+++++=s s s s s s D =0
Routh : S 5 1 2 11 S 4 2 4 10 S 3 ε 6 S 2
εε124- 10
S 6 S 0 10
第一列元素变号两次,有2个正根。
?
(2)483224123)(2
345+++++=s s s s s s D =0
Routh : S 5 1 12 32
S 4 3 24 48
S 3
31224
3
4?-=
32348316?-= 0 S 2
424316
4
12?-?= 48 S 121644812
0?-?= 0 辅助方程 124802s +=,
S 24 辅助方程求导:024=s
S 0 48
系统没有正根。对辅助方程求解,得到系统一对虚根 s j 122,=±。
…
(3)022)(4
5
=--+=s s s s D
Routh : S 5 1 0 -1
S 4 2 0 -2 辅助方程 0224=-s S 3 8 0 辅助方程求导
083=s
S 2 ε -2 S ε16
S 0 -2
第一列元素变号一次,有1个正根;由辅助方程0224
=-s 可解出: ))()(1)(1(2224
j s j s s s s -+-+=-
))()(1)(1)(2(22)(4
5j s j s s s s s s s s D -+-++=--+=
]
(4)0502548242)(2
3
4
5
=--+++=s s s s s s D
Routh : S 5 1 24 -25
S 4 2 48 -50 辅助方程 05048224=-+s s
S 3 8 96 辅助方程求导 09683
=+s s
S 2 24 -50 S 338/3
S 0 -50
第一列元素变号一次,有1个正根;由辅助方程0504822
4=-+s s 可解出: )5)(5)(1)(1(2504822
4
j s j s s s s s -+-+=-+
)5)(5)(1)(1)(2(502548242)(2345j s j s s s s s s s s s s D -+-++=--+++=
【
3-8 对于图所示系统,用劳斯(Routh )稳定判据确定系统稳定时的 k 取值范围。
图 题3-8图
解:闭环系统的特征方程为: k(s+1)+s(s3+4s2+2s+3)=0 s4+4s3+2s2+(k+3)s+k=0
S 4 1 2 ?
k
S 3 4 K+1 S 2 5-k
4k S 1
【
(-k 2-14k+15)/(5-k)
S 0
4k
∴ 0 3-9 设单位反馈控制系统的开环传递函数为 要求确定引起闭环系统持续振荡时的k 值和相应的振荡频率ω。 解:闭环特征方程为: s 4+12s 3+69s 2+198s+(200+k)=0 根据劳斯判据列劳斯表如下: S4169200+k S3) 12 198 S2200+k S1{ 200+k 由可求得使系统闭环时产生持续振荡的k值 k= 将上述k 值代入辅助方程 +200+k=0 \ 令s=jω,代入上述方程得到相应的持续振荡频率ω= rad/s 3-10 已知一系统如图所示,试求 (a)使系统稳定的k值的取值范围。 (b)若要求闭环系统的特征根都位于Res=-1 直线之左,确定k 的取值范围。 图题3-10图 解:(a) 闭环特征方程: s+1)+1)+k=0 ++s+k=0 根据Routh 判据使系统稳定应满足: ' k>0 > ∴0< k<14 (b) 令s=z-1 并代入特征方程并整理得: ++++k=0 ∴×> +k) 0 此时z〈0 既s<-1 。 3-11.某控制系统的方框图如图所示,欲保证阻尼比ξ=和响应单位斜坡函数的稳态误差为ss e=,试确定系统参数K、τ。 图 题3-11图 《 3-12 系统结构图如图所示。已知系统单位阶跃响应的超调量σ%3.16=%,峰值时间 1=p t s 。 (1) 求系统的开环传递函数)(s G ; (2) 求系统的闭环传递函数)(s Φ; (3) 根据已知的性能指标σ%、p t 确定系统参数K 及τ; (4) 计算等速输入s t t r )(5.1)(?=时系统的稳态误差。 > 图 题3-12图 解 (1) )110(10) 1(101) 1(10 )(++= ++ +=ττs s K s s s s s K s G (2) 2 222210)110(10)(1)()(n n n s s K s s K s G s G s ωξωωτ++=+++=+=Φ ) 2(+s s K - - s τ R(s) C(s) ! (3)由 ?? ???=-== =--1 13.16212ξ ωπσ?ξπn p o o o o t e 联立解出 ?????===263 .063.35 .0τωξn 由(2) 18.1363.31022 ===n K ω,得出 318.1=K 。 (4) 63.31 263.01018 .1311010)(lim 0 =+?=+= =→τK s sG K s v 413.063 .35.1=== v ss K A e 3-13 已知系统框图如图 和图 所示 试求 (1) 图所示系统的阻尼系数并简评其动态指标, (2) 若加入速度反馈成图,对系统的动态性能有何影响 (3) 欲使系统(b) 的阻尼系数 ξ= 时 ,应使 k 为何值 " 图 图 解: 图 (a) 的闭环传递函数: (2)图(b)的闭环传递函数: 所以阻尼比ξ随k’的增加而增加。 ∴加入速度反馈可使阻尼比ξ增加,使系统的超调量减少,过度过程时间减少。 , (3)当ξ=时,则 单位负反馈控制系统的开环传递函数如下, ) 1(2)s )(2+++= s s s K s G ( (1)试确定使系统稳定的K 的取值范围 (2)求输入函数分别是单位阶跃和单位斜波时系统的稳态误差。 解:(1)系统的闭环特征方程: 2)1(0)2()1(2 32=++++=++++K s K s s s K s s s S 3 1 《 K+1 S 2 1 2K S 1 1-K } 2K S 0 使系统稳定的K 的取值范围 K<1 (2) ) 1(1) 2K(s/2)1(2)s )(22+++=+++= s s s s s s K s G ( 系统含有一个积分环节,为Ⅰ型,对单位阶跃输入的稳态误差为0,对斜坡输入的稳态误差为1/2K(K<1) 3-15 对如图 所示的系统,当r(t)=4+6t, f(t)=-1(t)时 ,试求 】 (1) 系统的静态误差,(2) 要想减少关于扰动f(t) 的静差,应提高系统中哪一部分的比例系数,为什么 图 解: (a) r(t)=4+6t 系统的开环传递函数: 对给定r(t)的静态误差 设扰动之前的传递函数为k1,扰动之后的传递函数为 对扰动 f(t)=-1(t)的静态误差ess2 ' 这里k1=4 所以e ss2= ∴系统的静态误差 e ss=e ss1+e ss2=+= (b) 从(a)可看出对扰动的静态误差e ss2=1/k1 所以要想减少关于扰动f(t) 的静差,应提高系统中第一部分的比例系数k1 3-16 对如图所示的系统,,试求 (1)当r(t)=0, f(t)=1(t)时系统的静态误差e ss, (2)当r(t)=1, f(t)=1(t)时系统的静态误差e ss, (3)说明要减少e ss,应如何调整k1和k2, * (4)在扰动f作用点之前加入积分单元,对静差e ss有什么影响,若在 f 作用点之后加入积分单元,结果又如何 图 解:(1) (2) r(s)=1/s 引起的静态误差为e ss2 系统的静态误差 (3)由(b)知 ∴增大k1 可使静态误差减少 , 分析k2对e ss2的影响,e ss对k2求偏导得: 当k1 <1时, ∴ess 随k2的增大而增大 当k1>1 时 ∴ess 随k2 的增大而减小 (4) 在扰动作用点之前加入积分单元,扰动F(s)=1/s 引起的静态误差 在扰动作用点之后加入积分单元,扰动 F(s)=1/s 引起的静态误差。 3-17 已知单位反馈系统的闭环传递函数为 ? 试求单位斜坡函数输入和单位加速度函数输入时系统的稳态误差。 解:系统开环传递函数: 单位斜坡函数输入时 R(s)=1/s2 单位加速度函数输入时 R(s)=1/s3 3-18 设一随动系统如图所示,要求系统的超调量为,峰值时间s 1=p t , (1)求增益K 和速度反馈系数τ。 (2)根据所求的K 和τ值,计算该系统的上升时间和调节时间。 (3)用MATLAB 进行验证(或用配套软件验证)。 ¥ ) ( s R ) (s C s τ+1) 1(+s s K — 图题3-18 解 由图示得闭环特征方程为 0)1(112=+++K s K s τ 即 21n K ω =, n n t ωτωξ212 += 由已知条件 1 12.0%2 1/2 =-= ==--t n p t e t t ξωπσξπξ 解得 1 2 2 2 2t 52.389 .014 .345.0114 .3145 .0)1 (ln 1 ln -== -= -= =+= s n ξπωσπσ ξ ) 于是 4.121=K 17 5.0.4 127 .12121n ==-= K t ωξτ 37.052 .304 .027.0152 .32.06.012 =++=++= n t t d t ωξξ s t t n t t n r 5.6045 .0152.31.114.31arccos 12 22 =--=--= --= ξ ωξπξ ωβπ s t n t s .222 .535.40.5 35 .3=?= = ωξ 解毕。 3-19(北京理工大学2004 本题20分) 某系统由典型环节组成,是单位负反馈的二阶系统。它对单位阶跃输入的响应曲线如图所示,试求该系统的开环传递函数及其参数。 图3-29题3-17 解:考虑到()1≠∞h ,结合已知条件,可设闭环传递函数为: ()()( )2 2 2 2n n n s s K s R s C s ωζωω++?==Φ 由 ()95.095.0=?=∞K h 由图可知, ?? ? ?? =≈-==%6.31316.095.095 .025.1%1σp t 对照指标公式得 ?? ?==???????? ==---344.3344.0316.0112 12n n e ωζζ ωπζζπ 于是闭环传递函数为 ()182 .11301.2182 .1195.02++? =Φs s s 依题意,系统应由典型环节构成,且为单位反馈,相应的结构图可有两种形式,如图(a ), (b )所示: 图(a ) 图(b ) 对应图(a ),有()()()()()() s s s G s G s G s Φ-Φ=?+=Φ11111 开环传递函数为 ()()()()() 1494.01623.3007 .19205.2276.0623.10559.0301.2623.1021++≈++=++= s s s s s s s G 即开环传递函数由1个比例环节和2个惯性环节构成。 对应图(b ),有()()() s G s G K s 221+? =Φ ?()() 1435.0860 .4301.2182.1195.02 2 +=+= =s s s s s G K , 即开环传递函数由1个比例环节、1个积分环节和1个惯性环节构成。 第一章 习题答案 1-1 根据题1-1图所示的电动机速度控制系统工作原理图 (1) 将a ,b 与c ,d 用线连接成负反馈状态; (2) 画出系统方框图。 解 (1)负反馈连接方式为:d a ?,c b ?; (2)系统方框图如图解1-1 所示。 1-2 题1-2图是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,并画出系统方框图。 题1-2图 仓库大门自动开闭控制系统 解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如图解1-2所示。 1-3 题1-3图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。 题1-3图 炉温自动控制系统原理图 解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。炉子的实际温度用热电偶测量,输出电压 f u 。f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。 在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压 f u 正好等于给定电压r u 。此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程: 控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。 ?→T C ?→↑→↑→↑→↑→↑→↓→↓T u u u u u c a e f θ1C ↑ 系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。系统方框图见图解1-3。 A.比较元件 B.给定元件 C. 反馈元件 D.放大元件 第一章 自动控制的一般概念 1. 如果被调量随着给定量的变化而变化,这种控制系统叫( ) A. 恒值调节系统 B.随动系统 C. 连续控制系统 D.数字控制系 统 2. 主要用于产生输入信号的元件称为( ) 3. 与开环控制系统相比较,闭环控制系统通常对( )进行直接或间接地测量,通过反馈 环节去影响控制信号。 A.输出量 B. 输入量 C. 扰动量 D . "r 亘. 设定量 4. 直接对控制对象进行操作的元件称为( ) A.给定兀件 B. 放大兀件 C. 比较兀件 D . 执行兀件 5. 对于代表两个或两个以上输入信号进行 ( )的元件又称比较器。 A.微分 B. 相乘 C. 加减 D. 相除 6. 开环控制系统的的特征是没有( ) A.执行环节 B. 给定环节 C. 反馈环节 D . . 放大环节 7. 主要用来产生偏差的兀件称为( ) A.比较兀件 B. 给疋兀件 C. 反馈兀件 D . 放大兀件 8. 某系统的传递函数是 G s _ 1 2s +1 s e , 则该可看成由( ) 环节串联而成。 A.比例.延时 B. 惯性.导前 C. 惯性.延时 D. 惯性.比例 10 . 在信号流图中,在支路上标明的是( ) A.输入 B. 引出点 C. 比较点 D. 传递函数 11. 采用负反馈形式连接后,贝U () A. 一定能使闭环系统稳定; B. 系统动态性能一定会提高; C. 一定能使干扰引起的误差逐渐减小,最后完全消除; D. 需要调整系统的结构参数,才能改善系统性能。 八年级物理上册第二章测试题及答案 时间:60分钟满分:100分 一、选择题(13×3分) 1.关于声音的产生的说法中正确的是()A.只有声带不停地振动才能发声 B.只要人耳听不到,即使物体在振动也不会发声 C.一切正在发声的物体都在振动 D.以上说法都不对 2.我国正在进行登月计划的研究,按照计划,我国将在2007年将“嫦娥一号”送上月球,宇航员登上月球后,若有一块陨石落在他附近,则下列判断正确的是() A.宇航员能够听到陨石撞击月球的声音 B.陨石撞击月球时不会使月球的地面产生振动 C.宇航员虽然不能听到陨石撞击月球的声音,但他可以感受到这个声音的存在 D.陨石撞击月球的声音可以在月球的表面向四周传播 3.潜水员在不浮出水面的情况下依然可以听到岸上的谈话声,以下分析不正确的是()A.空气可以传播声音B.岸上的人的声带在振动 C.水可以传播声音D.潜水员的声带在振动 4.为了保护学习的环境,减少噪声污染,下列措施不可行的是()A.不要在教学区域内大声喧哗 B.在校园内及其附近栽花种草 C.将教室的所有门窗全部封死 D.教学楼的内外墙面尽量做得粗糙些 5.要改变音叉的音调,下列方法可行的是() A.把敲击音叉的橡皮锤改为小铁锤 B.改变敲击音叉的力度 C.用橡皮锤敲击固有频率不同的音叉 D.捏住音叉的下面部分后再敲击 6.下列哪项措施不是为了防止噪声对人的影响()A.汽车挡风玻璃上装有一层膜B.小汽车要求其密封性很好 C.汽车的排气管上要求装上消声器D.工厂的工人在车间带上耳罩 7.弦乐器在使用一段时间后需请调音师进行调音,调音师通过调节弦的长度将琴音调准,在此过程中调音师改变了琴弦的() A.响度B.音调C.音色D.振幅 8.在声音在传播的过程中,下列说法中正确的是()A.声音的音色会逐渐改变B.声音的音调会逐渐改变 C.声音的响度会逐渐改变D.声音的三要素都不会改变 9.小聪同学在使用复读机时,先将自己的声音录了下来,再摁了快放键,则此时播放的声音和他原来的声音相比较() A.音调变低B.音调变高 C.响度变小D.响度变大 10.下列关于振动和声波的分析正确的是() A.有声波时就一定有振动B.有振动时就一定有声波 C.有声波时就没有振动D.有振动时就没有声波 《自动控制原理》复习参考资料 一、基本知识1 1、反馈控制又称偏差控制,其控制作用是通过输入量与反馈量的差值进行的。 2、闭环控制系统又称为反馈控制系统。 3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。 4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统与程序控制系统。 5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。 6、控制系统的数学模型,取决于系统结构和参数, 与外作用及初始条件无关。 7、两个传递函数分别为G 1(s)与G 2 (s)的环节,以并联方式连接,其等效 传递函数为G 1(s)+G 2 (s),以串联方式连接,其等效传递函数为G 1 (s)*G 2 (s)。 8、系统前向通道传递函数为G(s),其正反馈的传递函数为H(s),则其闭环传递函数为G(s)/(1- G(s)H(s))。 9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s) /(1+ G(s))。 10、典型二阶系统中,ξ=时,称该系统处于二阶工程最佳状态,此时超调量为%。 11、应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。 12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。 13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。 14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。 15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。 16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。 17、对于典型二阶系统,惯性时间常数T愈大则系统的快速性愈差。 越小,即快速性18、应用频域分析法,穿越频率越大,则对应时域指标t s 越好 19最小相位系统是指S右半平面不存在系统的开环极点及开环零点。 自动控制原理选择题(48学时) 1.开环控制方式是按 进行控制的,反馈控制方式是按 进行控制的。 (A )偏差;给定量 (B )给定量;偏差 (C )给定量;扰动 (D )扰动;给定量 ( ) 2.自动控制系统的 是系统正常工作的先决条件。 (A )稳定性 (B )动态特性 (C )稳态特性 (D )精确度 ( ) 3.系统的微分方程为 222 )()(5)(dt t r d t t r t c ++=,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 4.系统的微分方程为)()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 5.系统的微分方程为()()()()3dc t dr t t c t r t dt dt +=+,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 6.系统的微分方程为()()cos 5c t r t t ω=+,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 7.系统的微分方程为 ττd r dt t dr t r t c t ?∞-++=)(5)(6 )(3)(,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 8.系统的微分方程为 )()(2t r t c =,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 9. 设某系统的传递函数为:,1 2186)()()(2+++==s s s s R s C s G 则单位阶跃响应的模态有: (A )t t e e 2,-- (B )t t te e --, 第三章相互作用单元测试题 一、选择题(本题共12小题,每小题4分,共48分,其中1-8为单选题,9-12为多选题,全部选对的得4分,选不全的得2分,有选错或不答的得0分) 1.下列说法中正确的是( D ) A.重力就是地球对物体的吸引力 B.形状规则的物体的重心与其几何中心重合 C.重力的方向总是垂直地面向下 D.同一物体在不同位置处重力大小不一定相等 2.设想把一个质量分布均匀的木球中央挖掉一个小球,则它的( A ) A.重力大小减小,重心位置不变 B.重力大小减小,重心在挖去的小球之上 C.重力大小不变,重心向外偏移 D.重力大小减小,重心被挖去而不复存在 3.关于弹力,下列叙述正确的是( B ) A.两物体相互接触,就一定会产生相互作用的弹力 B.两物体不接触,就一定没有相互作用的弹力 C.两物体有弹力作用,物体不一定发生了弹性形变 D.在桌面上的物体对桌面产生的压力就是物体的重力 4.如图所示,物体A和物体B叠放在一起,静止在水平桌面上。下列给出的各对力属于作用力与反作用力的是( C ) A.物体A所受的重力和B对A的支持力 B.物体B所受的重力和A对B的压力 C.物体A对B的压力和B对A的支持力 D.物体B所受的重力和桌面对B的支持力 5.如图所示,一重为10 N的球固定在支杆AB的上端,今用一段绳子水平拉球,使杆发生弯曲,已知绳的拉力为7.5 N,则AB杆对球的作用力( C ) A.方向水平向左,大小为7.5 N B.方向竖直向上,大小为10 N C.方向斜向左上方,大小为12.5N D.方向斜向右下方,大小为13.5N 6.如图所示,一物块沿固定斜面匀速下滑,下列说法正确的是( B ) A.物块受重力和斜面对它的支持力 B.物块受重力、斜面对它的支持力和摩擦力 C.物块受重力、斜面对它的支持力、摩擦力和下滑力 D.物块受重力、斜面对它的支持力、摩擦力、下滑力和压力 7.关于摩擦力的方向,下列叙述中不正确的是( D ) A.静摩擦力的方向,可能与物体运动的方向相同 B.静摩擦力的方向总是跟物体相对运动趋势的方向相反 C.滑动摩擦力的方向,可能与物体的运动方向相同 D.滑动摩擦力的方向,总是与物体的相对运动方向相同 8.如图所示,水平地面上堆放着原木,关于原木P在支撑点M、N处受力的方向,下列说法正确的是( A ) A.M处受到的支持力竖直向上 B.N处受到的支持力竖直向上 C.M处受到的静摩擦力沿MN方向 D.N处受到的静摩擦力沿水平方向 9.关于合力与其两个分力的关系,下列说法正确的是( BC ) A.合力一定,两等大分力的夹角越大,两分力越小 B.合力一定,两等大分力的夹角越大,两分力越大 C.两个分力大小不变,夹角越大,其合力越小 D.两个分力大小不变,夹角越大,其合力越大 10.有两组共点力:甲组中三个力的大小分别为6N、8N、12N,乙组中三个力的大小分别为5N、7N、14N,那么下列判断中正确的是( AD ) A.甲乙两组力合力的最大值相同 B.甲乙两组合力的最小值相同 C.甲组力合力的最小值不可能等于零 D.乙组力合力的最小值为2N 11.如图所示,有一刚性方形容器被水平力F压在竖直的墙面上处于静止状态;现缓慢地向容器内注水,直到注满为止,在此过程中容器始终保持静止,下列说法中正确的是( AC ) 自动控制原理教学大纲 自动控制原理 课程性质:专业技术基础课程 开设学期学时分配:第5学期 适用专业及层次:自动化、测控技术及仪器等工科类大学本科 先行、后继课程情况:先行课:工程数学1、2,电工、电子技术基础等 后继课:过程控制工程,运动控制系统等 推荐参考书: 1.《现代控制工程》绪方胜彦著(卢伯英佟明安罗维铭译)科学出版社 2.《自动控制原理与系统》上、下册清华大学吴麒等国防工业出版社 3.《自动控制原理》孙德宝主编化学工业出版社 4.《自动控制原理》天津大学李光泉主编机械工业出版社 5.《自动控制理论》侯夔龙主编西安交通大学出版社 6.《现代控制工程》第三版 [美] Katsuhiko Ogata 著 卢伯英于海勋等译电子工业出版 一、课程目的及要求: 本课程是自动化专业及其相关专业的一门主要技术基础课,是与后续专业课紧密相关的一门理论性较强的课程。重点在于学习反馈控制系统的基本理论及基本方法,掌握控制系统的分析,设计方法和技能,并能在后续专业课中应用其理论及方法进行分析和设计控制系统的任务。 本课程重点是线性、连续系统的基本理论,以掌握时域法、根轨迹法和频域法三大经典方法为基本要求。又本着适当扩充现代控制理论的思想,要求掌握状态空间分析法的基本方法和简单应用。对于非线性系统和离散时间系统的分析方法有一定程度的了解。 本课程教学学时数为90学时。 二、课程内容及学时分配: 第一章概述(3学时)介绍本课程研究的课题及方法,明确本课程的目的,介绍自动控制系统的基本原理与方式,控制系统的组成及系统的分类。 1.本课程研究课题及方法 1)自动控制系统的概念及在国民经济中的作用 2)研究对象及课题 3)自动控制理论的发展概况,经典理论与现代理论及其关系 4)课程的内容及特点 2.控制系统简介 1)控制系统的基本组成 2)控制系统的常用术语 3)自动控制系统示例 4)自动控制系统的分类 5)对自动控制系统的基本要求 第二章控制系统的数学模型(10 学时)介绍数学模型的概念,数学模型在分析、研究系统中的重要性,讲解常用的建模方法。1.系统的静态和动态特性 静态、动态特性的概念,动态特性在系统分析研究的作用以及数学描述 自动控制原理例题与习题 第一章自动控制的一般概念 【例1】试述开环控制系统的主要优缺点。 【答】 开环控制系统的优点有: 1. 1.构造简单,维护容易。 2. 2.成本比相应的死循环系统低。 3. 3.不存在稳定性问题。 4. 4.当输出量难以测量,或者要测量输出量在经济上不允许时,采用开环系统比较合适(例如在洗衣 机系统中,要提供一个测量洗衣机输出品质,即衣服的清洁程度的装置,必须花费很大)。 开环控制系统的缺点有: 1. 1.扰动和标定尺度的变化将引起误差,从而使系统的输出量偏离希望的数值。 2. 2.为了保持必要的输出品质,需要对标定尺度随时修正。 【例2】图1.1为液位自动控制系统示意图。在任何情况下,希望液面高度c维持不变,试说明系统工作原理,并画出系统原理方框图。 图1.1 液位自动控制系统示意图 【解】系统的控制任务是保持液面高度不变。水箱是被控对象,水箱液位是被控量,电位器设定电压u r(表征液位的希望值c r)是给定量。 当电位器电刷位于中点位置(对应u r)时,电动机不动,控制阀门有一定的开度、使水箱中流入水量与流出水量相等。从而液面保持在希望高度c r上。一旦流入水量或流出水量发生变化,例如当液面升高时,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动初通过减速器减小阀门开度,使进入水箱的液体流量减少。这时,水箱液面下降,浮子位置相应下降,直到电位器电刷回到中点位置,系统重新处于平衡状态,液面恢复给定高度。反之,若水箱液位下降,则系统会自动增大阀门开度,加大流入水量,使液位升到给定高度c r。 系统原理方框图如图1.2所示。 图1.2 系统原理方框图 习题 1.题图1-1是一晶体管稳压电源。试将其画成方块图并说明在该电源里哪些起着测量、放大、执行的作用以及系统里的干扰量和给定量是什么? 《 自动控制原理B 》 试题A 卷答案 一、单项选择题(本大题共5小题,每小题2分,共10分) 1.若某负反馈控制系统的开环传递函数为 5 (1) s s +,则该系统的闭环特征方程为 ( D )。 A .(1)0s s += B. (1)50s s ++= C.(1)10s s ++= D.与是否为单位反馈系统有关 2.梅逊公式主要用来( C )。 A.判断稳定性 B.计算输入误差 C.求系统的传递函数 D.求系统的根轨迹 3.关于传递函数,错误的说法是 ( B )。 A.传递函数只适用于线性定常系统; B.传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; C.传递函数一般是为复变量s 的真分式; D.闭环传递函数的极点决定了系统的稳定性。 4.一阶系统的阶跃响应( C )。 A .当时间常数较大时有超调 B .有超调 C .无超调 D .当时间常数较小时有超调 5. 如果输入信号为单位斜坡函数时,系统的稳态误差为无穷大,则此系统为( A ) A . 0型系统 B. I 型系统 C. II 型系统 D. III 型系统 二、填空题(本大题共7小题,每空1分,共10分) 1.一个自动控制系统的性能要求可以概括为三个方面:___稳定性、快速性、__准确性___。 2.对控制系统建模而言,同一个控制系统可以用不同的 数学模型 来描述。 3. 控制系统的基本控制方式为 开环控制 和 闭环控制 。 4. 某负反馈控制系统前向通路的传递函数为()G s ,反馈通路的传递函数为()H s ,则系统 的开环传递函数为()()G s H s ,系统的闭环传递函数为 () 1()() G s G s H s + 。 5 开环传递函数为2(2)(1) ()()(4)(22) K s s G s H s s s s s ++= +++,其根轨迹的起点为0,4,1j --±。 6. 当欠阻尼二阶系统的阻尼比减小时,在单位阶跃输入信号作用下,最大超调量将 增大 。 7.串联方框图的等效传递函数等于各串联传递函数之 积 。 三、简答题(本题10分) 图1为水温控制系统示意图。冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。冷水流量变化用流量计测量。试绘制系统方框图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么? 第三章 直线与方程 一、选择题 1.下列直线中与直线x -2y +1=0平行的一条是( ). A .2x -y +1=0 B .2x -4y +2=0 C .2x +4y +1=0 D .2x -4y +1=0 2.已知两点A (2,m )与点B (m ,1)之间的距离等于13,则实数m =( ). A .-1 B .4 C .-1或4 D .-4或1 3.过点M (-2,a )和N (a ,4)的直线的斜率为1,则实数a 的值为( ). A .1 B .2 C .1或4 D .1或2 4.如果AB >0,BC >0,那么直线Ax ―By ―C =0不经过的象限是( ). A .第一象限 B .第二象限 C .第三象限 D .第四象限 5.已知等边△ABC 的两个顶点A (0,0),B (4,0),且第三个顶点在第四象限,则BC 边所在的直线方程是( ). A .y =-3x B .y =-3(x -4) C .y =3(x -4) D .y =3(x +4) 6.直线l :mx -m 2y -1=0经过点P (2,1),则倾斜角与直线l 的倾斜角互为补角的一条直线方程是( ). A .x ―y ―1=0 B .2x ―y ―3=0 C .x +y -3=0 D .x +2y -4=0 7.点P (1,2)关于x 轴和y 轴的对称的点依次是( ). A .(2,1),(-1,-2) B .(-1,2),(1,-2) C .(1,-2),(-1,2) D .(-1,-2),(2,1) 8.已知两条平行直线l 1 : 3x +4y +5=0,l 2 : 6x +by +c =0间的距离为3,则b +c =( ). A .-12 B .48 C .36 D .-12或48 9.过点P (1,2),且与原点距离最大的直线方程是( ). A .x +2y -5=0 B .2x +y -4=0 C .x +3y -7=0 D .3x +y -5=0 10.a ,b 满足a +2b =1,则直线ax +3y +b =0必过定点( ). A .??? ? ?21 ,61 - B .??? ??61 - , 21 C .??? ? ?61 ,21 D .??? ??21 - , 6 1 二、填空题 《自动控制原理》习题 习题1 1有一水位控制装置如图所示。试分析它的控制原理,指出它是开环控制系统闭环控制系统?说出它的被控量,输入量及扰动量是什么?绘制出其系统图。 2 某生产机械的恒速控制系统原理如图所示。系统中除速度反馈外,还设置了电流正反馈以补偿负载变化的影响。试标出各点信号的正负号并画出框图。 3图示为温度控制系统的原理图。指出系统的输入量和被控量,并画出系统框图。 4.自动驾驶器用控制系统将汽车的速度限制在允许范围内。画出方块图说明此反馈系统。 5.双输入控制系统的一个常见例子是由冷热两个阀门的家用沐浴器。目标是同时控制水温和流量,画出此闭环系统的方块图,你愿意让别人给你开环控制的沐浴器吗? 6.开环控制系统和闭环控制系统各有什么优缺点? 7.反馈控制系统的动态特性有哪几种类型?生产过程希望的动态过程特性是什么? 习题2 1 试分别写出图示各无源网络的传递函数。 习题1图 2 求图示各机械运动系统的传递函数。 (1)求图a的=?(2)求图b的=?(3) 求图c的=? 习题2图 3 试分别写出图中各有源网络的传递函数U2(s)/ U1(s)。 习题3图 4交流伺服电动机的原理线路和转矩-转速特性曲线如图所示。图中,u为控制电压.T 为电动机的输出转矩。N为电动机的转矩。由图可T与n、u呈非线性。设在某平衡状态附近用增量化表示的转矩与转速、控制电压关系方程为 k n、k c为与平衡状态有关的值,可由转矩-转速特性曲线求得。设折合到电动机的总转动惯量为J,粘滞摩擦系数为f,略去其他负载力矩,试写出交流伺服电动机的方程式并求输入 为u c,输出为转角θ和转速为n时交流伺服电动机的传递函数。 习题4图 5图示一个转速控制系统,输入量是电压V,输出量是负载的转速 ,画出系统的结构图,并写出其输入输出间的数学表达式。 习题5图 6 已知一系统由如下方程组组成,试绘制系统框图,求出闭环传递函数。 7 系统的微分方程组如下: 自动控制原理选择填空 1、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。 2、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G1(s)+G2(s) (用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω 2 , 阻尼比=ξ 20.7072 = , 该系统的特征方程为 2220s s ++= , 该系统的单位阶跃响应曲线为 衰减振荡 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 1050.20.5s s s s +++ 。 6、根轨迹起始于 开环极点 ,终止于 开环零点 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系 统的开环传递函数为 (1) (1)K s s Ts τ++ 。 8、PI 控制器的输入-输出关系的时域表达式是 1()[()()]p u t K e t e t dt T =+? , 其相应的传递函数为 1[1]p K Ts + ,由于积分环节的引入,可以改善系统的 稳态性能 性能。 二、选择题(每题 2 分,共20分) 1、采用负反馈形式连接后,则 ( D ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( A )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( C ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。 4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( A ) A 、 型别2 第三章信用 一、填空题 1、信用行为的两个基本特征是()和()。答案:偿还;付息 2、从逻辑上推理,()的出现是信用关系存在的前提条件。答案:私有财产或私有制 3、信用有()和货币信用两种基本形式。答案:实物信用 4、货币运动与信用活动不可分解地连接在一起所形成的新范畴是()。 答案:金融 5、在前资本主义社会的经济生活中,()是占统治地位的信用形式。 答案:高利贷 6、高利贷信用最明显的特征是()。答案:极高的利率 7、典型的商业信用中包括两个同时发生的经济行为:()和()。 答案:买卖行为;借贷行为 8、商业票据主要有()和汇票两种。答 案:本票 9、资金供求者之间直接发生债权债务关系属()信用,银行业务经营属于()信用。答案:直接;间接 10、商业票据流通转让时发生的票据行为是()。答案:背书 11、银行信用在商业信用的基础上产生并发展,克服了商业信用在()、()和()上的局限性。答案:期限上;数量上;方向 12、在再生产过程中与公司企业的经营活动直接联系的信用形式有()与()。答案:商业信用;银行信用13、国家信用的主要工具是()。答案:国家债券 14、商业汇票必须经过债务人()才有效。答案:承兑 15、商业汇票是由()向()发出的支付命令书,命令他在约定的期限内支付一定的款项给第三人或持票人。答案:债权人;债务人 16、银行信用具备的两个特点是:()与()。答案:以金融机构为媒介;借贷的对象是货币 17、消费信用的方式主要有()与()。答 案:商品赊销;消费信贷 18、传统的商业票据有本票和汇票两种,其中由债务人向债权人发出的,承诺在约定期限内支付一定款项给债权人的支付承诺书是()。答案:本票 19、《中华人民共和国票据法》颁布的时间为()年。答案:1995 20、资产阶级反高利贷斗争的焦点是使利息率降低到()之下。 答案:利润水平 二、单项选择题 1、商业信用是企业之间由于()而相互提供的信用。 A、生产联系 B、产品调剂 C、物质交换 D、商品交易答案:D 2、信用的基本特征是()。 A、无条件的价值单方面让渡 B、以偿还为条件的价值单方面转移 C、无偿的赠与或援助 D、平等的价值交换答案:B 自动控制原理概述及开闭环实例分析 摘要 本文简单介绍了自动控制的基本原理和发展概况,并从开环控制和闭环控制两方面对自动控制原理进行了详细介绍。列举了开环控制和闭环控制的几个实例,结合实例分析了开环控制和闭环的优缺点,并对两种控制方式进行了对比。 关键词:自动控制、基本原理、开环、闭环 1自动控制基本原理及发展概述 所谓的自动控制,就是指在没有人直接参与的情况下,利用外加的设备(称为控制器)操作被控对象(如机器、设备或生产过程)的某个状态或参数(称为被控量),使其按预先设定的规律自动运行。 一般情况下自动控制理论的发展过程可以分为以下三个阶段: 1.1经典控制理论时期 时间为20世纪40-60年代,经典控制理论主要是解决单输入单输出问题,主要采用以传递函数、频率特性、根轨迹为基础的频域分析方法。此阶段所研究的系统大多是线性定常系统,对非线性系统,分析时采用的相平面法一般不超过两个变量。 1.2现代控制理论时期 时间为20世纪60-70年代,这个时期由于计算机的飞速发展,推动了空间技术的发展。经典控制理论中的高阶常微分方程可以转化为一阶微分方程组,用以描述系统的动态过程,这种方法可以解决多输入多输出问题,系统既可以是线性的、定常的,也可以是非线性的、时变的。 1.3大系统理论、智能控制理论时期 时间为20世纪70年代末至今,控制理论向着“大系统理论”和“智能控制”方向发展。“大系统理论”是用控制和信息的观点,研究各种大系统的结构方案、总体设计中的分解方法和协调等问题的技术理论基础。而“智能控制”是研究与模拟人类智能活动及其控制与信息传递过程的规律,研究具有某些仿人智能的工程控制与信息处理系统。 2自动控制系统分类 按照控制方式和策略,系统可分为开环控制系统和闭环控制系统。 2.1开环控制系统 开环控制系统是一种简单的控制系统,在控制器和控制对象间只有正向控制作用,系统的输出量不会对控制器产生任何影响,如图1所示。在该类控制系统中,对于每一个输入量,就有一个与之对应的工作状态和输出量,系统的精度仅取决于元件的精度和执行机构的调整精度。 控制量输出量 图1 开环控制系统 自动控制原理1 一、单项选择题(每小题1分,共20分) 1. 系统和输入已知,求输出并对动态特性进行研究,称为( ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计 2. 惯性环节和积分环节的频率特性在( )上相等。 A.幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率 3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( ) A.圆 B.半圆 C.椭圆 D.双曲线 5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电 动机可看作一个( ) } A.比例环节 B.微分环节 C.积分环节 D.惯性环节 6. 若系统的开环传 递函数为2) (5 10+s s ,则它的开环增益为( ) .2 C 7. 二阶系统的传递函数52 5)(2++= s s s G ,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn ,则可以( ) A.提高上升时间和峰值时间 B.减少上升时间和峰值时间 C.提高上升时间和调整时间 D.减少上升时间和超调量 9. 一阶微分环节Ts s G +=1)(,当频率T 1=ω时,则相频特性)(ωj G ∠为( ) ° ° ° ° 10.最小相位系统的开环增益越大,其( ) > A.振荡次数越多 B.稳定裕量越大 C.相位变化越小 D.稳态误差越小 11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。 12.某单位反馈系统的开环传递函数为:()) 5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。 .20 C 13.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数 有( ) .1 C 、选择题 第3章基因的本质 1肺炎双球菌最初的转化实验结果说明( ) A .加热杀死的S 型细菌中的转化因子是 DNA B .加热杀死的S 型细菌中必然含有某种促成转化的因子 C .加热杀死的S 型细菌中的转化因子是蛋白质 D . DNA 是遗传物质,蛋白质不是遗传物质 2?在DNA 分子中,两条链之间的两个脱氧核苷酸相互连接的部位是( ) A ?碱基 B ?磷酸 C .脱氧核酸 D ?任一部位 3. 一个DNA 分子复制完毕后,新形成的 A .是DNA 母链的片段 和DNA 母链相同,但T 被U 所代替 C . DNA 子链( B . 和 DNA D . 和 DNA 4. 下列制作的DNA 双螺旋结构模型中,连接正确的是( ) 母链之一完全相同 母链稍有不同 ) O 代表五碇軸 O 代去錢服 I I 代农育包碱宰 A D DNA 分子在细胞什么时期能够自我复制( A .有丝分裂前期或减数分裂第一次分裂前期 B .有丝分裂中期或减数分裂第一次分裂中期 C .有丝分裂后期或减数分裂第一次分裂后期 D .有丝分裂间期或减数分裂第一次分裂前的间期 6.下图表示核苷酸的结构组成,则下列说法不正确的是( A .图中 5. B . DNA C . DNA a 代表磷酸,b 为五碳糖,c 为含氮碱基 的b 有一种 的c 有一种 是由脱氧核糖核苷酸构成的双链结构 D . DNA 7. 染色体是遗传物质的主要载体的依据是( A .染色体能被碱性染料着色 B. 染色体能变细变长 C. 它能复制,并在前后代间保持一定的连续性 D . DNA 主要分布于染色体上 8. 噬菌体侵染细菌繁殖形成的子代噬菌体( 含有细菌的氨基酸,都不含有亲代噬菌体的核苷酸 含有细菌的核苷酸,都不含有亲代噬菌体的氨基酸 含有亲代噬菌体的核苷酸,不含有细菌的氨基酸 含有亲代噬菌体的氨基酸,不含有细菌的核苷酸 C . D . 9.若DNA 分子的一条链中(A + G ) : (T + C ) = 2.5,则 A . 0.25 B . 0.4 C . 1 10 .下述关于双链 DNA 分子的一些叙述,哪项是错误的 DNA 双链中(A + G ) : (T + C )的比值 是( D . 2.5 1、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的 差值进行的。 2、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传 递函数为()G s ,则G(s)为 G1(s)+G2(s) (用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω 阻尼比=ξ 0.707= , 该系统的特征方程为 2220s s ++= , 该系统的单位阶跃响应曲线为 衰减振荡 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 1050.20.5s s s s +++ 。 6、根轨迹起始于 开环极点 ,终止于 开环零 点 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该 系统的开环传递函数为 (1) (1)K s s Ts τ++ 。 8、PI 控制器的输入-输出关系的时域表达式是 1()[()()]p u t K e t e t d t T =+? , 其相应的传递函数为 1[1]p K Ts + ,由于积分环节的引入,可以改善系统的 稳态性能 性能。 二、选择题(每题 2 分,共20分) 1、采用负反馈形式连接后,则 ( D ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( A )。 A 、增加开环极点; B 、在积分环节外加单位负反 馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( C ) A 、稳定; B 、单位阶跃响应曲线为单调指数上 升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。 4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( A ) A 、 型别2 第三章试题清单(含答案) 一.单选题 1.马克思主义认为,人类社会赖以存在和发展的基础是:() A.吃喝穿住 ( ) B.人的自觉意识活动 ( ) C.物质生产活动(√) D.社会关系的形成 ( ) 世纪50年代,北大荒人烟稀少、一片荒凉。由于人口剧增,生产力水平低下,吃饭问题成 为中国面临的首要问题,于是人们不得不靠扩大耕地面积增加粮食产量,经过半个世纪的开垦,北大荒成了全国闻名的“北大仓”。然而由于过度开垦已经造成了许多生态问题。现在,黑龙江垦区全面停止开荒,退耕还“荒”。这说明:() A.人与自然的和谐最终以恢复原始生态为归宿 ( ) B.人们改造自然的一切行为都会遭到“自然界的报复” ( ) C.人在自然界面前总是处于被支配的地位 ( ) D.人们应合理地调节人与自然之间的物质变换(√) 3.“许多事情我们可以讲一千个理由、一万个理由,但老百姓吃不上饭,就没有理由。‘民以食为天’”。这说明:() A.人的生理需求是社会历史的基础 ( ) B.人的本质决定于人的自然属性 ( ) C.社会发展的根本动力是人的物质欲望 ( ) D.人们首先必须吃、喝、住、穿、行,然后才能从事政治、科技、艺术、宗教等活动(√) 4.制约人们行为及其动机的根本条件是:() A.生产方式(√) B.传统意识 ( ) C.政治制度 ( ) D.阶级关系 ( ) 5.下列哪一原理可以解释“大众心理影响经济走势”这一社会现象:() A.社会意识对社会存在具有决定作用 ( ) B.社会意识反作用于社会存在(√) C.社会心理可以左右社会发展方向 ( ) D.只有正确的社会意识才能影响社会发展 ( ) 6.社会意识主要是对:() A.物质资料生产方式的反映(√) B.阶级斗争的反映 ( ) C.统治阶级意志的反映 ( ) D.社会发展规律的反映 ( ) 《自动控制原理》说课稿 一、教材 1、教学用教材: 《自动控制原理》:高等工科院校控制类课程系列化教材 主编:孙亮、杨鹏 北京工业大学出版社 这本教材从工程实际应用的角度出发,注重基础性、系统性和实用性,较深入地介绍了自动控制系统的数学描述方法、时域分析、频域分析方法等。全书共八章(具体内容在教学设计过程中进行详细介绍),每一章后面都给出了相应的习题,并在书中提供了部分习题参考答案供学生参考、对照。 另外,这门自动控制原理课程是计算机控制技术课程的先修前导课程,只有把这门课程学好,才能更好的学习计算机控制技术(计算机控制这门课程在本届学生下学期学习)。 2、辅助教材:《自动控制原理》科学出版社 《现代控制理论》清华大学出版社 3、先修后续课: 先修:《电路分析》、《复变函数》 后续:《现代控制理论》、《计算机控制技术》、《嵌入式技术》 二、教学方法与教学设计过程 (一)课程的简要介绍 1、自动控制原理课程本身要大量用到Laplace变换、复变函数理论,所以要想学好自动控制原理,首先得看看自己的大学数学基础有没有打扎实了(尤其是复变函数与积分变换)。 2、除了应该具备的数学基础外,还需有处理相关专业知识的能力。比如建立实际系统的物理模型,这里就需要有良好的电路(主要是模拟电路)、大学物理、机械原理的知识。同时还需要有一定的数学建模能力。 3、正是因为课程中充满了数学,所以千万不要把自动控制原理当成数学来学,那样会越学越迷糊,甚至会最终怀疑控制理论的科学性。因为若当作一门数学课,你掌握的只是一些方程的操作和图形的画法,你无法理解为什么实际的系统会遵 循控制理论所描述的规律(比如水位能够被精确的控制),这会让你觉得是完全是数学的作用,而忽略了自动控制的基本思想以及这些数学方程背后所受到物理规律支配这一事实。 4、学自动控制原理,掌握基本的控制思想是最重要的(它有别于数学思想、物理思想)。大学阶段所学的自动控制原理主要涉及经典控制理论,所以它最根本的控制思想是【负反馈思想】,很多稳定性理论都是立足于这一思想上建立的,所以数学虽然很重要,但数学对于自动控制理论来说只是一个强有力的工具。 5、要珍惜每次做练习题的机会。题目不在多、在精,一般把书本上每章后面的习题全部掌握,你就算达到基本掌握的程度了。 6、讲仿真软件要认真听。每次程序都要开动自己的脑筋,不要机械的按照老师的步骤输入到计算机中,要有自己的程序方法。 7、要树立学好自动控制原理的信心。要知道,能够接触到人类历史上尤其是19、20世纪的革命性的著名理论与思想,应该感到自豪。 (二)教学内容的组织 1、对控制系统的定性描述上升到对控制系统的定量描述。讲好这一点很重要,它能让学生学习工程技术学科的一般的方法,学会如何从大量的、实际的、具体的物理或化学系统,通过系统中的机理关系,建立起统一的数学模型,将个性问题共性化,将具体问题抽象化,从而利用教学的方法进行定量研究,再回到实际的系统中。 2、稳定、稳态、动态----“三态”去描述系统的性能,“三态”的思想要贯穿在课程讲授的始终,围绕系统的三态进行分析和设计。 3、讲好代数描述和几何描述的关系和变换,使学生学会利用数学工具,从多个角度描述问题和看问题,在“自动控制原理”课程中要用到:微分方程模型、传递函数模型、方框图模型、根轨迹模型、脉冲响应模型、Bode图、Nyquist图等多种模型的表示形式,这些模型中有着十分有意义的关系。比如:控制系统的根轨迹图它既能定量地将控制系统的模型描述出来,还能直接地表示出控制系统的性能;在控制系统的Bode图上,既表现了系统中的数量关系又表现了系统的性能优劣;等等。这些方法的讲解,可以引导学生学习和思考如何利用工具,将实际问题与抽象描述相结合,对于学生分析问题的能力有很大的帮助。自动控制原理习题集与答案解析
自动控制原理复习题(选择和填空)
人教版八年级物理上册第二章第三章测试题及答案
自动控制原理题目含答案
自动控制原理选择题
第三章2相互作用 单元测试题(答案)
自动控制原理大纲
自动控制原理例题与习题[1]
自动控制原理期末考试题
人教版必修二数学第三章测试题及答案解析
自动控制原理习题
自动控制原理选择填空
第三章 信用试题及答案
自动控制原理概述及开闭环实例分析
自动控制原理选择题库
高中生物必修二第三章测试题及答案
自动控制原理选择填空
马原课机考试题库第三章试题及答案
(完整word版)自动控制原理说课