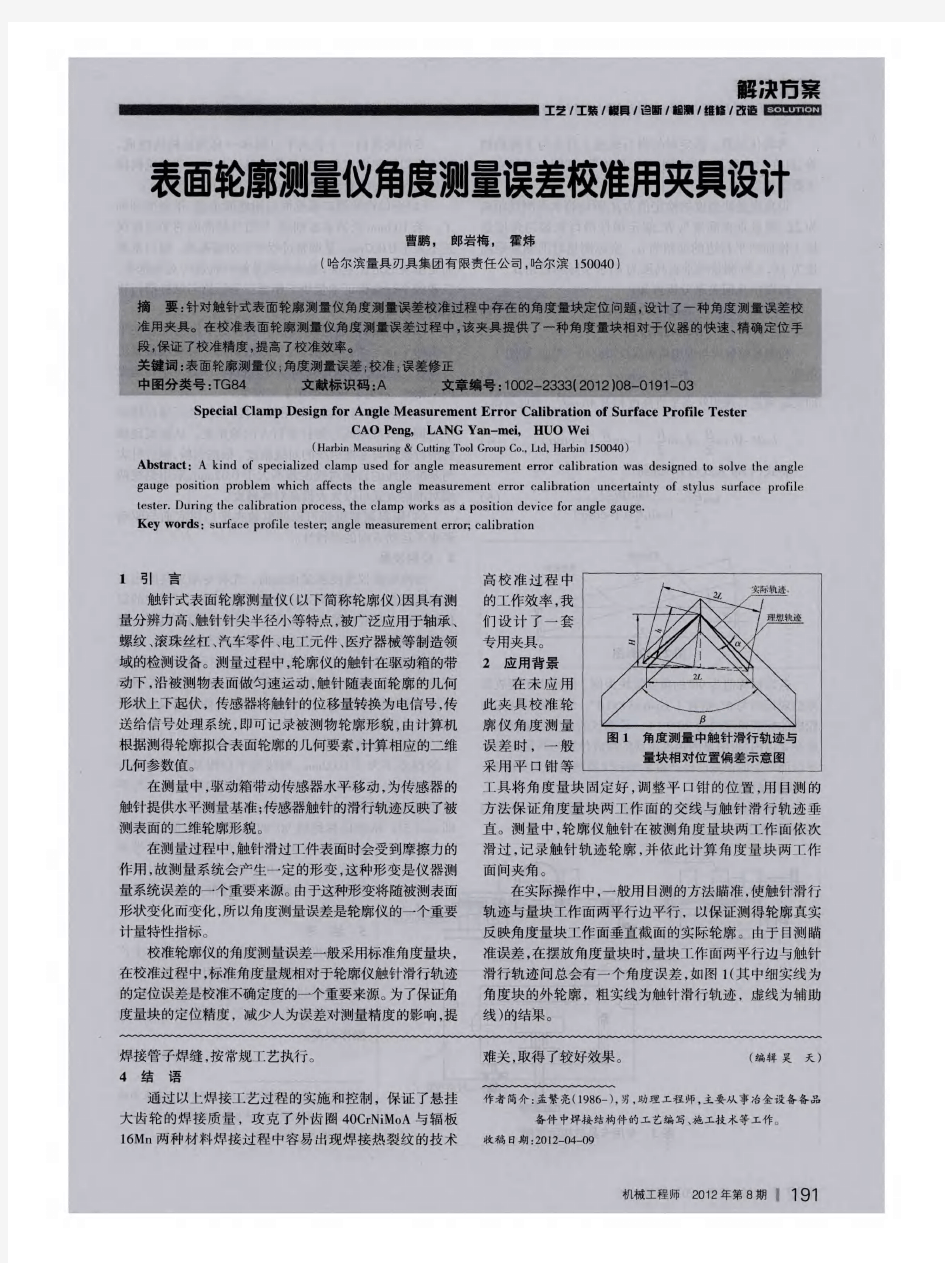
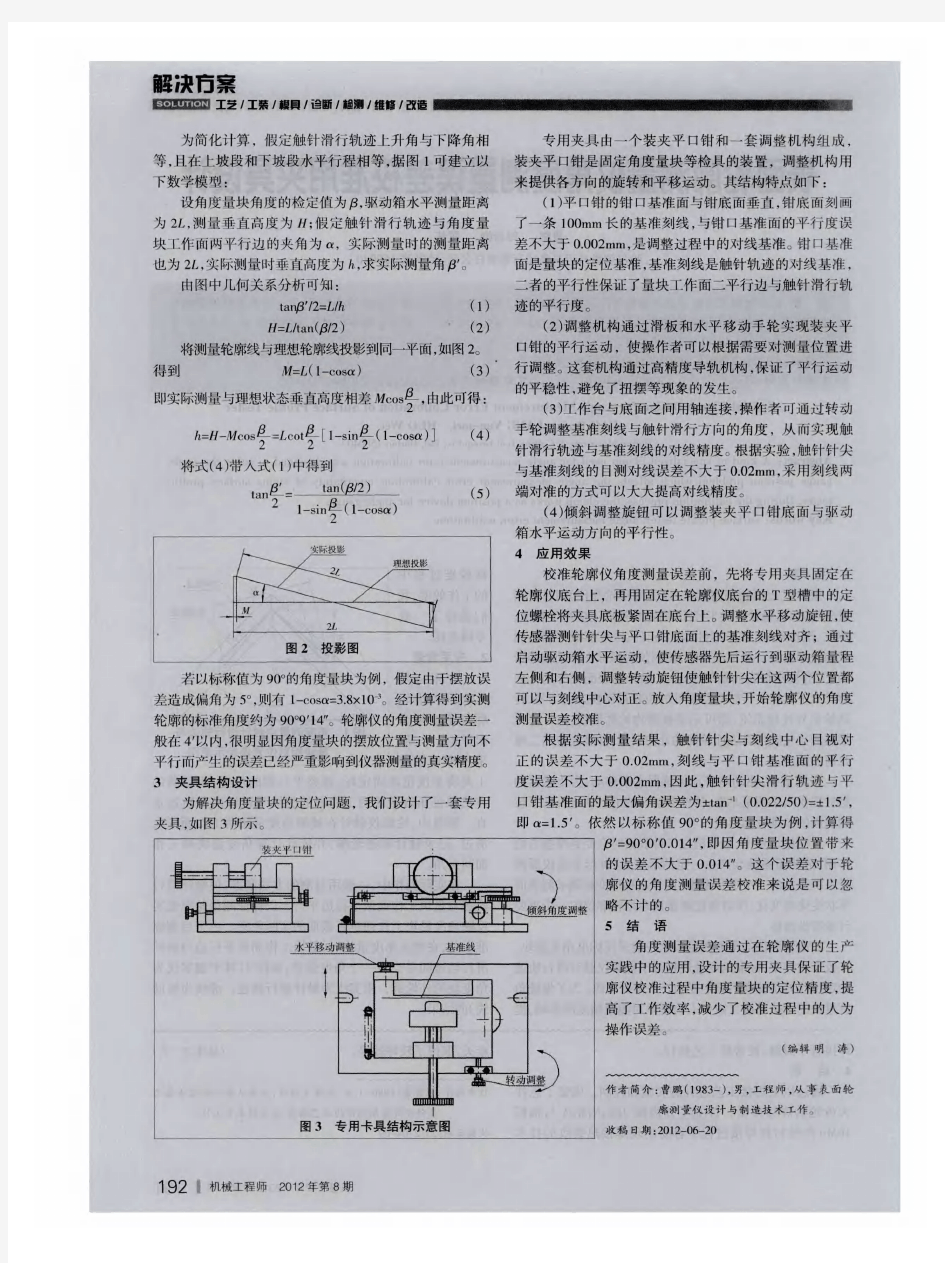
表面轮廓测量仪角度测量误差校准用夹具设计
取样长度在表面粗糙度测量中的应用
取样长度、评定长度在粗糙度测量中的应用 来源:温州三和量具仪器有限公司 表面粗糙度值,通常采用光切显微镜、干涉显微镜及轮廓仪计测量。取样长度与评定长度的合理选用对粗糙度值的评定起着重要作用。然而在仪器使用中,常常未按标准规定实现取样长度与评定长度的选用,影响了测量结果的准确度。因此寻求一个取样长度、评定长度在仪器测量中正确的实施途径,尤为必要。 1 取样长度与评定长度的选取 GB1031—83《表面粗糙度参数及其数值》给出了取样长度数值表1,公比为10?。标准规定取样长度值应从该系列值中选取。 规定和选择取样长度,是为了限制和减弱表面波纹度对表面粗糙度测量结果的影响,使得到的粗糙度值正确反映表面的粗糙度特性。一般情况下,可根据表面加工方法和粗糙度参数值大小选用。GB1031—83附录B规定了取样长度推荐值表2。 标准规定,评定粗糙度时必须取一段能反映加工表面粗糙度特性的最小长度,它包含一个或数个取样长度,这几个取样长度的总和称为评定长度。 评定长度值根据表面加工方法和相应取样长度按GB1031—83附录B选用。一般加工表面选取评定长度为5个连续的取样长度表2。加工均匀性较好的表面,可选用小于5个取样长度的评定长度;均匀性较差的表面,可选用大于5个取样长度的评定长度。若图样上或技术文件中已标明评定长度值,则应按图样或技术文件中的规定执行。 所谓“加工表面均匀性”是指加工后表面各部位粗糙度数值一致的程度。如果在一个加工表面上按取样长度连续测量几段所得粗糙度值一样,说明加工表面均匀;反之粗糙度值不一样,有时甚至相差很大,则表明加工表面不均匀。 任何表面的粗糙度都是由一系列不同高度和间距的峰谷组合而成,这些峰谷反映了加工表面微观几何形特性。从外观上或感觉上这种特性通常总带有表面加工过程中所用加工方法的特征。 车、铣、刨削加工表面往往带有均匀的间距和清晰的刀具痕迹方向,其纹理具有明显的规律性,它所形成的是一个典型的周期轮廓有时也叠加有不同程度的随机成分有明显的周期,这一周期反映了进给量是均匀相等的,加工表面均匀性好。
轮廓测量仪操作规程
轮廓测量仪操作规程 轮廓测量仪能够对各种工件轮廓进行长度、高度、间距、水平距离、垂直距离、角度、圆弧半径等几何参数测量,并且具有强大的CNC功能,能进行一系列操作自动化,可高效率地进行测量作业。 一.操作步骤 1.测量前准备。 2.开启电脑、打开机器电源开关、检查机器启动是否正常。 3.擦净工件被测表面。 二.测量 1.将测针正确、平稳、可靠地移动在工件被测表而上。 2.工件固定确认工件不会出现松动或者其它因素导致测针与工件相撞的情况出现。 3.在仪器上设置所需的测量条件。 4.开始测量。测量过程中不可触摸工件更不可人为震动桌子的情况产生。
5.测量量完毕,根据图纸对结果进行分析,标出结果,并保存、打印。 三.保养 1.每天开机前及测量完毕后用高织纱棉布沾无水酒精清洁工装表面、测针、轨道。2.平时不使用时将所有电源关闭,且将测针的保护套套上。 3.严禁用扫帚清扫地面,以免灰尘扬起。 4.对仪器进行全面的维护和精度调整。 四.维护 1.测力标定 如图1所示。此界面用于对测针扫描时测量力的设置。 (图1)测力标定界面 测力标定示意图,如图2所示。 (图2)测力标定示意图
注意:请在专业人员的指导下进行测力标定和测杆摆动调整! 下针尖测力设置:如图2所示。 1)把电子称放置在测量位置下方,把电子称清零(注意:电子称开机后自动清零,电子称 显示的单位应为“g”)。 2)控制测针移到电子称上方。 3)软件上先设置“测力大小”(普通工件测力一般为7g),然后点击“设置”按钮,则输 入框变为可编辑状态。 4)点击“向下测力”(绿色标志表示选中),此时测针向下接触电子称。 5)同时在主界面观察Z0光栅值,看摆杆是否处于水平位置(注意:测力标定应在摆杆处 于水平位置时进行操作,摆杆处于水平位置时的Z0光栅值主要由机械安装确定,一般情况下,此时Z0光栅值等于0.000mm,具体参数见“测力标定”界面的提示值),若不处于水平位置,则上下移动Z轴使Z0光栅值等于提示值即可。 6)观察电子称的读数应在7g左右(注意:读数前先轻轻抬起摆杆,再轻轻放下,不能通 过摆杆的重力和张力落下,然后重复3-5次观察电子称读数),若不是7g左右,则应通过调整“向下位置”下方的角度值来调整测力,然后点击“保存”按钮。 7)重复步骤(5),直至测力正常。 2.编码器标定 如图3所示。此界面用于使用激光干涉仪对光栅示值进行标定,非专业人员不允许随意操作。
各种测量仪器的使用方法
各种测量仪器的使用方法 水准仪及其使用方法 高程测量就是测绘地形图的基本工作之一,另外大量的工程、建筑施工也必须量测地面高程,利用水准仪进行水准测量就是精密测量高程的主要方法。 一、水准仪器组合: 1、望远镜 2、调整手轮 3、圆水准器 4、微调手轮 5、水平制动手轮 6、管水准器 7、水平微调手轮 8、脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座 螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮就是调平的,在水平镜内通过三角棱镜反射,水平重合,就就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b’时,将望远镜横丝对准偏差一半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重复以上做法,直到相等为止。
四、水准仪的使用方法 水准仪的使用包括:水准仪的安置、粗平、瞄准、精平、读数五个步骤。 1、安置 安置就是将仪器安装在可以伸缩的三脚架上并置于两观测点之间。首先打开三脚架并使高度适中,用目估法使架头大致水平并检查脚架就是否牢固,然后打开仪器箱,用连接螺旋将水准仪器连接在三脚架上。 2、粗平 粗平就是使仪器的视线粗略水平,利用脚螺旋置园水准气泡居于园指标圈之中。具体方法用仪器练习。在整平过程中,气泡移动的方向与大姆指运动的方向一致。 3、瞄准 瞄准就是用望远镜准确地瞄准目标。首先就是把望远镜对向远处明亮的背景,转动目镜调焦螺旋,使十字丝最清晰。再松开固定螺旋,旋转望远镜,使照门与准星的连接对准水准尺,拧紧固定螺旋。最后转动物镜对光螺旋,使水准尺的清晰地落在十字丝平面上,再转动微动螺旋,使水准尺的像靠于十字竖丝的一侧。 4、精平 精平就是使望远镜的视线精确水平。微倾水准仪,在水准管上部装有一组棱镜,可将水准管气泡两端,折射到镜管旁的符合水准观察窗内,若气泡居中时,气泡两端的象将符合成一抛物线型,说明视线水平。若气泡两端的象不相符合,说明视线不水平。这时可用右手转动微倾螺旋使气泡两端的象完全符合,仪器便可提供一条水平视线,以满足水准测量基本原理的要求。注意?气泡左半部份的移动方向,总与右手大拇指的方向不一致。 5、读数 用十字丝,截读水准尺上的读数。现在的水准仪多就是倒象望远镜,读数时应由上而下进行。先估读毫米级读数,后报出全部读数。 注意,水准仪使用步骤一定要按上面顺序进行,不能颠倒,特别就是读数前的符合水泡调整,一定要在读数前进行。 五、水准仪的测量 测定地面点高程的工作,称为高程测量。高程测量就是测量的基本工作之一。高程测量按所使用的仪器与施测方法的不同,可以分为水准测量、三角高程测量、GPS高程测量与气压高程测量。水准测量就是目前精度最高的一种高程测量方法,它广泛应用于国家高程控制测量、工程勘测与施工测量中。 水准测量的原理就是利用水准仪提供的水平视线,读取竖立于两个点上的水准尺上的读数,来测定两点间的高差,再根据已知点高程计算待定点高程。 如下图所示,在地面上有A、B两点,已知A点的高程为HA、为求B点的高程HB,在A、B两点之间安置水准仪,A、B两点各竖立一把水准尺,通过水准仪的望远镜读取水平视线分别在A、B两点水准尺上截取的读数为a与b,可以求出A、B两点问的高差为:
接触式轮廓测量仪解决方案
产品解决方案产品名称:SJ5760-200轮廓测量仪
一、产品开发背景 随着人们对品质的不断追求,导致对加工的要求越来越高,一些工件或产品的轮廓如槽、半径、角度、圆心之间的距离等等,在使用三次元、投影仪等常规方法不能满足要求,有时还需将工件剖开,并测量不准确,这时通过轮廓仪的测针与被测物表面的滑移进行测量将是最合适准确的测量方法。 针对国内轮廓测量精度低、稳定性差等缺点和不足,以及国外高精度轮廓仪价格昂贵等因素,我公司于2015年在国内首家推出高性价比重大产品——SJ5760-200轮廓测量仪。 该产品具有精度高、使用方便、功能强等优点,能够对各种工件轮廓进行长度、高度、间距、水平距离、垂直距离、角度、圆弧半径等几何参数测量,并且具有强大的CNC功能,能进行一系列操作自动化,可高效率地进行测量作业。 二、产品图片 产品型号:SJ5760-200 产品名称:轮廓测量仪
三、产品描述 SJ5760-200轮廓仪采用进口高精度光栅测量系统、高精度研磨导轨、高性能非接触直线电机、音圈电机测力系统、高性能计算机控制系统技术,实现对各种工件表面轮廓进行测量和分析。通过高精度研磨导轨、高性能直线电机保证测量的高稳定性及直线度,采用进口高精度光栅测量系统建立工件表面轮廓的二维坐标,计算机通过修正算法对光栅数据进行修正,最终还原出工件轮廓信息并以曲线图显示出来,通过软件提供的分析工具可对轮廓进行各种参数分析。 轮廓仪为全自动测量设备,操作者只需装好被测工件,在检定软件上设定扫描的开始、结束位置,点击“开始”按钮,测针会自动接触工件表面,并按设定的位置扫描;在进行轮廓扫描的过程中,软件界面会实时描绘轮廓曲线;扫描结束后,操作者可通过轮廓分析工具对生成的轮廓曲线进行分析,得到如直线度、圆度、角度、距离、间距等轮廓参数。 系统软件为简体中文操作系统,操作方便。 四、产品功能 1. 表面轮廓评定:评定任何两点间的距离,两线夹角,圆弧半径,并可对轮廓进行直线度、圆度 分析等,重新分析和重新测量的操作简单,提高效率; 2. 尺寸标注:半径、两圆心中心距离、X方向尺寸、Z方向尺寸、斜边尺寸、两直线之间的夹角、 圆弧最高或最低点、直线与直线相交、直线与圆弧相交、圆弧与圆弧相交、尺寸标注线大小修改、在数据图形某点上加标记等; 3. 局部轮廓放大和调平; 4. 界面友好,卓越的操作性,更符合中国用户操作习惯; 5. 测量记录采用集中式数据库管理,可按被测件类型、生产单位、出厂编号、检测员、送检单位、 设备编号、检定日期和有效日期等查询和管理测量记录; 6. 可从数据库中选定多条记录成批打印测量记录,可将检定数据输出到Word、Excel、AutoCAD(选 配)文档,具有数据备份和还原数据库功能; 7. 输出多种Word格式报表,并支持完全的自定义报表,定制测量记录报表; 8. 具有强大的CNC功能,能进行一系列的自动化,高效率的测量作业; 9. 成熟简单的标定,对仪器的精度和测针磨损进行精确的补偿。
表面粗糙度仪的原理
OU1300 表面粗糙度仪的原理 使用说明书
一、概述 OU1300型表面粗糙度测量仪是适合于生产现场环境和移动测量需要的一种手持式仪器,可测量多种机加工零件的表面粗糙度,可根据选定的测量条件计算相应的参数,并在显示器上显示出全部测量参数和轮廓图形。该仪器它操作简便,功能全面,测量快捷,精度稳定,携带方便,能测量最新国际标准的主要参数,本仪器全面严格执行了国际标准。测量参数符合国际标准并兼容美国、德国、日本、英国等国家的标准。适用于车间检定站、实验室、计量室等环境的检测。 1.1 主要特点 ●机电一体化设计,体积小,重量轻,使用方便; ●采用 DSP 芯片进行控制和数据处理,速度快,功耗低; ●大量程,多参数 Ra,Rz,Rq,Rt。 ●高端机器增加 Rp,Rv,R3z,R3y,RzJIS,Rsk,Rku,Rsm,Rmr 等参数; ●128×64 OLED 点阵显示器,数字/图形显示;高亮无视角; ●显示信息丰富、直观、可显示全部参数及图形; ●兼容 ISO、DIN、ANSI、JIS 多个国家标准; ●内置锂离子充电电池及充电控制电路,容量高、无记忆效应; ●有剩余电量指示图标,提示用户及时充电; ●可显示充电过程指示,操作者可随时了解充电程度 ●连续工作时间大于 20 小时 ●超大容量数据存储,可存储 100 组原始数据及波形。 ●实时时钟设置及显示,方便数据记录及存储。 ●具有自动休眠、自动关机等节电功能 ●可靠防电机走死电路及软件设计 - 1 -
●显示测量信息、菜单提示信息、错误信息及开关机等各种提示说明信息; ●全金属壳体设计,坚固、小巧、便携、可靠性高。 ●中/英文语言选择; ●可连接电脑和打印机; ●可打印全部参数或打印用户设定的任意参数。 ●可选配曲面传感器、小孔传感器、测量平台、传感器护套、 接长杆等附件。 1.2 测量原理 本仪器在测量工件表面粗糙度时,先将传感器搭放在工件被测表面上,然后启动仪器进行测量,由仪器内部的精密驱动机构带动传感器沿被测表面做等速直线滑行,传感器通过内置的锐利触针感受被测表面的粗糙度,此时工件被测表面的粗糙度会引起触针产生位移,该位移使传感器电感线圈的电感量发生变化,从而在相敏检波器的输出端产生与被测表面粗糙度成比例的模拟信号,该信号经过放大及电平转换之后进入数据采集系统,DSP 芯片对采集的数据进行数字滤波和参数计算,测量结果在显示器上给出,也可在打印机上输出,还可以与PC 机进行通讯。 1.3 仪器各部分名称 传感器 - 2 -
定位误差计算
创作编号: GB8878185555334563BT9125XW 创作者:凤呜大王* 3.2.3 定位误差的分析与计算 在成批大量生产中,广泛使用专用夹具对工件进行装夹加工。加工工艺规程设计的工序图则是设计专用夹具的主要依据。由于在夹具设计、制造、使用中都不可能做到完美精确,故当使用夹具装夹加工一批工件时,不可避免地会使工序的加工精度参数产生误差,定位误差就是这项误差中的一部分。判断夹具的定位方案是否合理可行,夹具设计质量是否满足工序的加工要求,是计算定位误差的目的所在。 1.用夹具装夹加工时的工艺基准 用夹具装夹加工时涉及的基准可分为设计基准和工艺基准两大类。设计基准是指在设计图上确定几何要素的位置所依据的基准;工艺基准是指在工艺过程中所采用的基准。与夹具定位误差计算有关的工艺基准有以下三种: (1)工序基准在工序图上用来确定加工表面的位置所依据的基准。工序基准可简单地理解为工序图上的设计基准。分析计算定位误差时所提到的设计基准,是指零件图上的设计基准或工序图上的工序基准。 (2)定位基准在加工过程中使工件占据正确加工位置所依据的基准,即为工件与夹具定位元件定位工作面接触或配合的表面。为提高工件的加工精度,应尽量选设计基准作定位基准。 (3)对刀基准(即调刀基准)由夹 具定位元件的定位工作面体现的,用于调 整加工刀具位置所依据的基准。必须指出, 对刀基准与上述两工艺基准的本质是不 同,它不是工件上的要素,它是夹具定位 元件的定位工作面体现出来的要素(平面、 轴线、对称平面等)。如果夹具定位元件是 支承板,对刀基准就是该支承板的支承工 a) 作面。在图3.3中,刀具的高度尺寸由对 导块2的工作面来调整,而对刀块2工作 面的位置尺寸7.85±0.02是相对夹具体4 的上工作面(相当支承板支承工作面)来 确定的。夹具体4的上工作面是对刀基准, 它确定了刀具在高度方向的位置,使刀具 加工出来的槽底位置符合设计的要求。图 3.3中,槽子两侧面对称度的设计基准是工 b 图3.21 钻模加工时的基准分析
机械加工定位误差分析及菱形销设计
机械加工定位误差分析及菱形销设计 如前所述,为保证工件的加工精度,工件加工前必须正确的定位。所谓正确的定位,除应限制必要 的自由度、正确地选择定位基准和定位元件之外,还应使选择的定位方式所产生的误差在工件允许的误 差范围以内。本节即是定量地分析计算定位方式所产生的定位误差,以确定所选择的定位方式是否合理。 使用夹具时造成工件加工误差的因素包括如下四个方面: ( 1 )与工件在夹具上定位有关的误差,称为定位误差Δ D ; ( 2 )与夹具在机床上安装有关的误差,称为安装误差Δ A ; ( 3 )与刀具同夹具定位元件有关的误差,称为调整误差Δ T ; ( 4 )与加工过程有关的误差,称为过程误差Δ G 。其中包括机床和刀具误差、变形误差和测量 误差等。 为了保证工件的加工要求,上述误差合成后不应超出工件的加工公差δ K ,即 Δ D + Δ A + Δ T + Δ G ≤δ K 本节先分析与工件在夹具中定位有关的误差,即定位误差有关的内容。 由定位引起的同一批工件的设计基准在加工尺寸方向上的最大变动量,称为定位误差。当定位误差,一般认为选定的定位方式可行。 Δ D ≤ 1/3 δ K 一、定位误差产生的原因及计算 造成定位误差的原因有两个:一个是由于定位基准与设计基准不重合,称为基准不重合误差(基准 不符误差);二是由于定位副制造误差而引起定位基准的位移,称为基准位移误差。
(一)基准不重合误差及计算 由于定位基准与设计基准不重合而造成的定位误差称为基准不重合误差,以Δ B 来表示。 图 3 -61a 所示为零件简图,在工件上铣缺口,加工尺寸为 A 、 B 。图3-61b 为加工示意图,工件以底面和 E 面定位, C 为确定刀具与夹具相互位置的对刀尺寸,在一批工件 的加工过程中 C 的位置是不变的。 加工尺寸 A 的设计基准是 F ,定位基准是 E ,两者不重合。当一批工件逐个在夹具上 定位时,受尺寸S ±δ S /2 的影响,工序基准 F 的位置是变动的, F 的变动影响 A 的大小,给 A 造成误差,这个误差就是基准不重合误差。 显然基准不重合误差的大小应等于定位基准与设计基准不重合而造成的加工尺寸的变动 范围,由图3-61b 可知: Δ B =A max-A min =S max-S min= δ S S 是定位基准 E 与设计基准 F 间的距离尺寸。当设计基准的变动方向与加工尺寸的方向相同时, 基准不重合误差就等于定位基准与设计基准间尺寸的公差,如图3-61 ,当S 的公差为δ S ,即 Δ B = δ S (3-2 ) 当设计基准的变动方向与加工尺寸方向有一夹角(其夹角为β)时,基准不重合误差等于定位基准
触针式表面粗糙度测量仪示值误差不确定度评定
XXXXX 作业指导书 测量不确定度评定 XXXXXX 触针式表面粗糙度测量仪示值误差XXXX-0*-0*批准 XXXX-0*-0*实施
触针式表面粗糙度测量仪示值误差 测量不确定度评定 1 校准方法(依据JJF1105-2003触针式表面粗糙度测量仪校准规范) 触针式仪器的示值用一组标准粗糙度样板进行校准。在仪器各取样长度上测量相应标准多刻线样板的a R 值,与标准多刻线样板检定证书上给出的0a R 值,比较得到相应测量条件下的仪器的示值误差。 2 标准样板与被校触针式仪器技术指标 标准多刻线样板表面粗糙度样板技术指标见表一: 触针式表面粗糙度测量仪技术指标见表二: 3 数学模型 从触针式仪器读出的示值为: a a a R R R ?+=0 式中: 0a R —标准样板值; a R ?—仪器的示值误差;即0a a a R R R -=? 4 方差与灵敏系数 由测量数学方程可得:()()[]()()[]()0220222a a a a a c R u R c R u R c R u ?+?=?
式中:()a R u —与仪器有关的不确定度分量; ()0a R u —与标准样板有差的不确定度分量; 因为()1=???=a a a R R R c ;()100-=??=a a a R R R c ; 所以()()()0222a a a c R u R u R u +=? 5 实测记录 实测记录见表三: 6 不确定度分析 因为标准的表面粗糙度样板,表面轮廓比较规则,因此影响a R 示值的不确定度来源主要有: ()a 标准样板检定误差引入的不确定度分量1u ; ()b 由于各种随机因素影响,使仪器示值不重复而引入的不确定度 分量2u ;
定位误差计算解析
3.2.3 定位误差的分析与计算 在成批大量生产中,广泛使用专用夹具对工件进行装夹加工。加工工艺规程设计的工序图则是设计专用夹具的主要依据。由于在夹具设计、制造、使用中都不可能做到完美精确,故当使用夹具装夹加工一批工件时,不可避免地会使工序的加工精度参数产生误差,定位误差就是这项误差中的一部分。判断夹具的定位方案是否合理可行,夹具设计质量是否满足工序的加工要求,是计算定位误差的目的所在。 1.用夹具装夹加工时的工艺基准 用夹具装夹加工时涉及的基准可分为设计基准和工艺基准两大类。设计基准是指在设计图上确定几何要素的位置所依据的基准;工艺基准是指在工艺过程中所采用的基准。与夹具定位误差计算有关的工艺基准有以下三种: (1)工序基准 在工序图上用来确定加工表面的位置所依据的基准。工序基准可简单地理解为工序图上的设计基准。分析计算定位误差时所提到的设计基准,是指零件图上的设计基准或工序图上的工序基准。 (2)定位基准 在加工过程中使工件占据正确加工位置所依据的基准,即为工件与夹具定位元件定位工作面接触或配合的表面。为提高工件的加工精度,应尽量选设计基准作定位基准。 (3)对刀基准(即调刀基准) 由夹具定位元件的定位工作面体现的,用于调整加工刀具位置所依据的基准。必须指出,对刀基准与上述两工艺基准的本质是不同,它不是工件上的要素,它是夹具定位元件的定位工作面体现出来的要素(平面、轴线、对称平面等)。如果夹具定位元件是支承板,对刀基准就是该支承板的支承工作面。在图3.3中,刀具的高度尺寸由对导块2的工作面来调整,而对刀块2工作面的位置尺寸7.85±0.02是相对夹具体 4的上工作面(相当支承板支承工作面)来确定 的。夹具体4的上工作面是对刀基准,它确定了 刀具在高度方向的位置,使刀具加工出来的槽底 位置符合设计的要求。图3.3中,槽子两侧面对 称度的设计基准是工件上大孔的轴线,对刀基准 则为夹具上定位圆柱销的轴线。再如图3.21所 示,轴套件以内孔定位,在其上加工一直径为φ d 的孔,要求保证φd 轴线到左端面的尺寸L 1及孔中心线对内孔轴线的对称度要求。尺寸L 1的 设计基准是工件左端面A ′,对刀基准是定位心 轴的台阶面A ;φd 轴线对内孔轴线的对称度的 设计基准是内孔轴线,对刀基准是夹具定位心轴 2的轴线OO 。 2.定位误差的概念 用夹具装夹加工一批工件时,由于定位不准 确引起该批工件某加工精度参数(尺寸、位置) 的加工误差,称为该加工精度参数的定位误差 (简称定位误差)。定位误差以其最大误差范围 来计算,其值为设计基准在加工精度参数方向上 的最大变动量,用dw 表示。 a) b 图3.21 钻模加工时的基准分析
机床夹具设计方案中工件定位误差的分析及其数值计算
机床夹具设计中工件定位误差的 分析及其数值计算 工件在夹具中的定位, 对保证本道工序尺寸的加工精度起着至关重要的作用, 正确的工件定位是保证得到我们所需要的加工表面的前提, 这也是工件在定位过程中要解决的第一个问题———位规 律问题。但是再精密的加工方法和手段都不可避免地使被加工对象产生加工误差。对于夹具中的被定位工件和定位元件同样如此, 它们也存在着或大或小的加工误差, 加上元件在夹具中的定位基准的选取不同, 这些因素的客观存在都会使同一基本尺寸的各个工件在夹具中的几何位置有所变化, 从而造成本道工序的加工误差,这就是工件在定位时要解决的第二个问题———定位误差问题。由此可 以看出, 工件在夹具中的定位问题。是夹具设计过程中要解决的首要问题, 下面就定位误差的产生及定位误差的计算方法, 需要强调的是: 分析定位误差的前提是用夹具安装法安装工件, 保证被加工表 面之间的位置精度, 用调整法保证被加工面的 尺寸精度。 1相关文献对定位误差的阐述 111定位误差的定义 相关文献对定位误差定义有下面几种叙述: 其一: 一批工件由于在夹具中定位而使得工序基准在沿工序尺寸方向上产生的最大位移。其二: 用夹具装夹加工一批工件时, 由于定位不准确引起该批工件某加工参数的误差。其三: 因定位引起的工序尺寸误差。其四: 工件加工尺寸方向上设计基准的最大变动量。其五: 由于定位不准而造成某一工序在工序尺寸或定位要求方面的加工误差。其六: 工件在夹具中定位不准确引起的加工误差为定位误差等等。各文献所述定义的一致点是定位误差的方向都是在工序方向上, 区别是产生最大位移量的主体是工序基准还是定位基准。 112定位误差的计算 由于对定位误差的定义各文献的叙述有所区别,导致在对定位误差进行计算时其结果也不相同。在 工 图1心轴水平放置件采用内孔定位, 定位元件采用心轴, 工件和定位元件的配合关系采用间隙配合时所产生的定位误差区别最大。对于其中的基准不重合误差观点一致, 不同之处是基准位移误差。如 对于图1 所示心轴水平放置时的定位方案, 其中T是工件定位内孔的公差, T是定位元件心轴的公差, T 是工件外圆的公差, 2e是工件内外圆的位置误差(同轴度或跳动公差等> 。按照文献[ 1, 4, 5, 6 ] 的叙述, 其定位误差为T+ T+ T2+ 2e, 按文献[ 2 ] 的算法, 定位误差是T+ T+ T+ X2+ 2e, 按文献《机床与液压》20051No11 ·45·[ 3 ] 的观点计算得到的定位误差则是T+ T+ T2+e。下面就上述两方面存在的不同论述阐述作者的观点。 2定位误差的产生 在应用夹具安装工件进行调整法加工时, 当工件的定位基准与设计基准不重合, 同时由于工件和位元件又都存在着制造误差时, 将使工件被加工表面的设计基准沿工序尺寸方向上产生位移, 称之“定 图2心轴竖直放置位误差”, 用Δ表示, 它是由以下两个原因引起的。211基准不重合误差当工件的定位基准与其设计基准不重合时, 必然使设计基准在沿工序尺寸方向上产生位移, 产生了“基准不重合误差”, 用 Δ表示。 212基准位移误差 由于工件和定位元件本身存在着制造误差, 又因为是用调整法进行加工,必然使一批工件的定位基准相对于调刀基准在工序尺寸方向上的位置发生变化, 产生了一定的位移, 形成了“基准位移误差”, 用Δ表示。定位误差是由于基准不重合和基准位移两项因素的影响产生的。 3定位误差的求解方法 311定位误差组成法
便携式钢轨轮廓测量仪中文使用说明书
MIG 1000 便携式 钢轨断面测量仪设备操作维护手册 2009年4月21日手册编号 P/N 13832R2-OTM 版本号 1.10
版权所有。本文档所包含信息受版权保护。未经MERMEC Group公司许可,不得对本文档任何部分进行复制、保存以及通过任意形式的传播(包括电子、机械、印刷等等)。 本文档所含信息被认为是真实可靠的。本公司对设备的使用,以及因为设备引起的版权冲突和任何第三方的其他权利不承担责任。 MIG 1000 是MERMEC Group公司的注册商标. Windows 2000和Windows XP是微软公司的注册商标. 本文档中其他任何商标均来自各自的制造商. ? Copyright 2006-2009 by MERMEC Group 版权所有,违者必究. MERMEC Group via Oberdan,70 70043 Monopoli (BA) Italy 080 8876570 https://www.360docs.net/doc/cd7411831.html,
PROPRIETARY INFORMATION: This document contains information proprietary to MERMEC Group This information may not be distributed without the written authorization of an officer of MERMEC Group 目录 第一章介绍 1.1 概述..........................................................................................................................1-1 1.2 测量技术..................................................................................................................1-1 1.3 应用..........................................................................................................................1-1 1.3.1 标准钢轨对比................................................................................................1-2 1.3.2 轨型“前后” 对比...........................................................................................1-2 1.3.3 打磨断面对比................................................................................................1-3 第二章使用安全 2.1 警告..........................................................................................................................2-1 2.2 产品标签..................................................................................................................2-1 2.2.1 出光孔标签....................................................................................................2-2 2.2.2 认证标签........................................................................................................2-3 2.2.3 警告标签........................................................................................................2-3 2.2.4 厂商信息标签................................................................................................2-3 2.3 安全装置..................................................................................................................2-3 2.4 激光功率..................................................................................................................2-4 第三章操作 3.1 设备安装..................................................................................................................3-1 3.1.1 无护轨安装....................................................................................................3-2 3.1.2 有护轨安装....................................................................................................3-3 3.1.3 正线磨损严重并有护轨时的安装................................................................3-4 3.2 启动系统..................................................................................................................3-4 3.3 采集断面..................................................................................................................3-5 3.4 编辑断面..................................................................................................................3-5 3.5 保存断面..................................................................................................................3-6 3.6 查看已保存断面......................................................................................................3-6 3.7 定义对比断面..........................................................................................................3-6 3.8 更改阈值设定..........................................................................................................3-7
轮廓测量仪原理及应用
轮廓测量仪概述 SJ5700轮廓测量仪是一款集成表面粗糙度和轮廓测量的测量仪器;采用进口高精度光栅测量系统、高精度研磨导轨、高性能非接触直线电机、音圈电机测力系统、高性能计算机控制系统技术,实现对各种工件表面粗糙度和轮廓进行测量和分析。通过高精度研磨导轨、高性能直线电机保证测量的高稳定性及直线度,采用进口高精度光栅测量系统建立工件表面轮廓的二维坐标,计算机通过修正算法对光栅数据进行修正,最终还原出工件轮廓信息并以曲线图显示出来,通过软件提供的分析工具可对轮廓进行各种参数分析。 轮廓仪为全自动测量设备,操作者只需装好被测工件,在检定软件上设定扫描的开始、结束位置,点击“开始”按钮,测针会自动接 触工件表面,并按设定的位置扫描;可高精度地测量精密加工零部件的粗糙度和轮廓形状,再选择所需评价参数即可进行评价。 系统软件为简体中文操作系统,操作方便。
轮廓测量仪功能 SJ5700 轮廓测量仪可测量各种精密机械零件的素线轮廓形状参数,角度处理(坐标角度,与 Y 坐标的夹角,两直线夹角)、圆处理(圆弧半径,圆心到圆心距离,圆心到直线的距离,交点到圆心的距离,直线到切点的距离)、点线处理(两直线交点,交点到直线距离,交点与交点距离,交点到圆心的距离)、直线度、凸度、对数曲线、槽
深、槽宽、沟曲率半径、沟边距、沟心距、轮廓度、水平距离等形状参数。 轮廓测量仪性能特点 1、高精度、高稳定性、高重复性:完全满足被测件测量精度 要求。 1) 选用国际领先的高精度光栅测量系统和高精度电感测量系 统,测量精度高; 2) 自主研发高精度研磨导轨系统,导轨材料耐磨性好、保证 系统稳定可靠工作; 3) 高性能直线电机驱动系统,保证测量稳定性高、重复性好; 2、智能化管理与检测软件系统: 仪器操作界面友好,操作者很容易即可基本掌握仪器操作,使用十分简便。 1) 10多年积累的实用检定软件设计经验,向客户提供简洁、 实用、快速的操作体验; 2) 功能强大、自动处理数据、打印各种格式的检定报告,自 动显示、打印、保存、查询测量记录; 3) 测量围广,可满足绝大多数类型的工件粗糙度轮廓测量; 4) 可自动和手动选取被测段进行评定,可依据客户要求进行 软件功能的定制; 5) 纯中文操作软件系统,更好的为国用户服务; 6) 打印格式正规、美观。检定数据可存档,或集中打印,不 占用检定操作时间;
喷砂除锈粗糙度检测仪
喷砂除锈粗糙度检测仪使用说明书
基本概述 喷砂除锈粗糙度检测仪又叫喷砂粗糙度仪、喷砂除锈粗糙度测试仪、喷砂除锈粗糙度等级、喷砂粗糙度测量仪、锚纹仪、喷砂除锈粗糙度判断适用于:喷丸喷砂行业、印刷行业、喷涂防腐行业等表面粗糙度需求的行业使用、根据选定的测量条件计算出相应的参数、在液晶显示器上清晰地显示出全部测量参数。
目录 1. 特性 (1) 2. 规格和参数 (2) 3. 面板说明 (3) 4. 测量步骤 (4) 5. 仪器校准 (4) 6. 更换电池 (5) 7. 与PC机通讯 (5) 8. 日常维护与保养 (5) 9. 售后服务 (6)
1. 特性 1.1 符合ASTM D 4417-B, IMO MSC.215(82), SANS 5772,US Navy NSI 009-32, US Navy PPI 63101-000.测试方法、可直接测量表面的峰顶-谷底的高度。 1.2 适用于:喷丸喷砂行业、印刷行业、喷涂防腐行业等表面粗糙度需 求的行业使用、根据选定的测量条件计算出相应的参数、在液晶显示器上清晰地显示出全部测量参数。 1.3 测量工件表面粗糙度时、将仪器传感器放在工件被测表面上、由仪器 内置的锐利触针感受被测表面的粗糙度、此时工件被测表面的粗糙度引起触针产生位移、该位移使传感器电感线圈的电感量发生变化、从而在相敏整流器的输出端产生与被测表面粗糙度成比例的模拟信号、该信号经过放大及电平转换之后进入数据采集系统、DSP芯片将采集的数据进行数字滤波和参数计算、测量结果在液晶显示器显示出来、同时可以与PC机进行通讯、实现数据分析统计和打印。 1.4 高精度电感传感器; 1.5 一体化设计、体积小、重量轻、使用; 1.6 具有自动关机功能。本仪器设有两种关机方式、即手动关机和自动关 机。在任何时侯、只要轻按下多功能键、待显示器上出现OFF、松开手就可手动关断整机电源;另一方面,若在1分钟的时间内、未按动任何按键、或者未进行任何测量、则会自动关机,以实现省电功能。1.7 具有公英制转换功能。 1.8 具有平均值计算功能。 1
轮廓测量仪和三坐标测量机的区别
轮廓仪,顾名思义,测量产品表面轮廓尺寸的仪器。随着轮廓仪的迭代更新,现在的轮廓仪是一款对物体的轮廓、二维尺寸、二维位移进行测试与检验的精密设备,在汽车制造和铁路行业的应用十分广泛。 今天小编要为大家分享一下轮廓仪和三坐标测量机区别,希望能够帮助到大家。 1、用途的区别 轮廓仪可测量各种精密机械零件的粗糙度和轮廓形状参数。用拟合法来评定园弧和直线等。从而可测量园弧半径、直线度、凸度、沟心距、倾斜度、垂直距
离、水平距离、台阶等形状参数。仪器还可对各种零件表面的粗糙度进行测试;可对平面、斜面、外园柱面、内孔表面、深槽表面、圆弧面和球面的粗糙度进行测试,并实现多种参数测量。 接触过一款三坐标测量机CMM,是意大利coord3的,对于这种cmm我自己认为有很大缺陷,当然也有优点。它可以测量模具产品,电子类产品,通讯类,汽车类等等很多。在一个工厂它的用途确实很广泛,但它的价格却也不菲。 2、结构的区别 轮廓仪由花岗岩平板、工作台、传感器、驱动箱、显示器、电脑和打印机等部分组成.测量时可选定被测零件的不同位置,设定各种测量长度进行自动测量,评定段内采样数据达数万个点。并可显示或打印轮廓形状及其尺寸,各种粗糙度参数及轮廓的支承长度率曲线等。 三坐标主要有机械系统,测头系统,电气控制硬件系统,数据处理软件系统组成。 以上就是深视智能小编对轮廓仪和三坐标测量机区别的分享内容,希望能够帮到有需要的朋友,深圳市深视智能科技有限公司重点针对机器视觉领域的三维
视觉系统产品线投入研发,推出激光轮廓仪,轮廓仪,激光轮廓传感器,激光轮廓扫描仪,激光轮廓测量仪,3D线扫相机,线扫描相机,3d激光测量仪,线激光扫描仪,3D激光扫描仪等产品,广泛应用于各大检测行业,欢迎来电咨询。
测绘仪器全站仪的使用
测绘仪器全站仪的使用 内容:了解全站仪的分类、等级、主要技术指标;掌握全站仪的基本操作,测角、测边、测三维坐标和三维坐标放样的原理和操作方法;了解全站仪的对边测量、悬高测量、面积测量等方法。 重点:全站仪的基本操作,测角、测边、测三维坐标和三维坐标放样的原理和操作方法。难点:全站仪测三维坐标和三维坐标放样的原理和操作方法。 教学方法:采取演示法教学。讲解拓普康全站仪使用,在课堂上每讲一项功能后,利用多媒体课室的优点,现场演示一次,并将操作过程通过投影仪投影到屏幕上,起到直观、形象的效果,使学生能迅速掌握全站仪的使用。 §7.1 全站仪(total station)的功能介绍 随着科学技术的不断发展,由光电测距仪,电子经纬仪,微处理仪及数据记录装置融为一体的电子速测仪(简称全站仪)正日臻成熟,逐步普及。这标志着测绘仪器的研究水平制造技术、科技含量、适用性程度等,都达到了一个新的阶段。 全站仪是指能自动地测量角度和距离,并能按一定程序和格式将测量数据传送给相应的数据采集器。全站仪自动化程度高,功能多,精度好,通过配置适当的接口,可使野外采集的测量数据直接进入计算机进行数据处理或进入自动化绘图系统。与传统的方法相比,省去了大量的中间人工操作环节,使劳动效率和经济效益明显提高,同时也避免了人工操作,记录等过程中差错率较高的缺陷。 全站仪的厂家很多,主要的厂家及相应生产的全站仪系列有:瑞士徕卡公司生产的TC 系列全站仪;日本TOPCN (拓普康)公司生产的GTS 系列;索佳公司生产的SET 系列;宾得公司生产的PCS 系列;尼康公司生产的DMT 系列及瑞典捷创力公司生产的GDM 系列全站仪。我国南方测绘仪器公司90 年代生产的NTS 系列全站仪填补了我国的空白,正以崭新的面貌走向国内国际市场。 全站仪的工作特点: 1、能同时测角、测距并自动记录测量数据; 2、设有各种野外应用程序,能在测量现场得到归算结果; 3、能实现数据流; 一、TOPCON 全站仪构造简介 图1为宾得全站仪PTS-V2 ,图2为尼康C-100 全站仪,图3为智能全站仪GTS-710,图4为蔡司Elta R系列工程全站仪,图5为徕卡TPS1100系列智能全站仪。 二、全站仪的功能介绍 1、角度测量(angle observation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB ,则: 1)当精度要求不高时: 瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。 2)当精度要求高时:——可用测回法(method of observation set )。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。 2、距离测量(distance measurement )